
Effect of Impact Angle on the Impact Mechanical Properties of Bionic Foamed Silicone Rubber Sandwich Structure


Abstract
1. Introduction
2. Materials and Methods
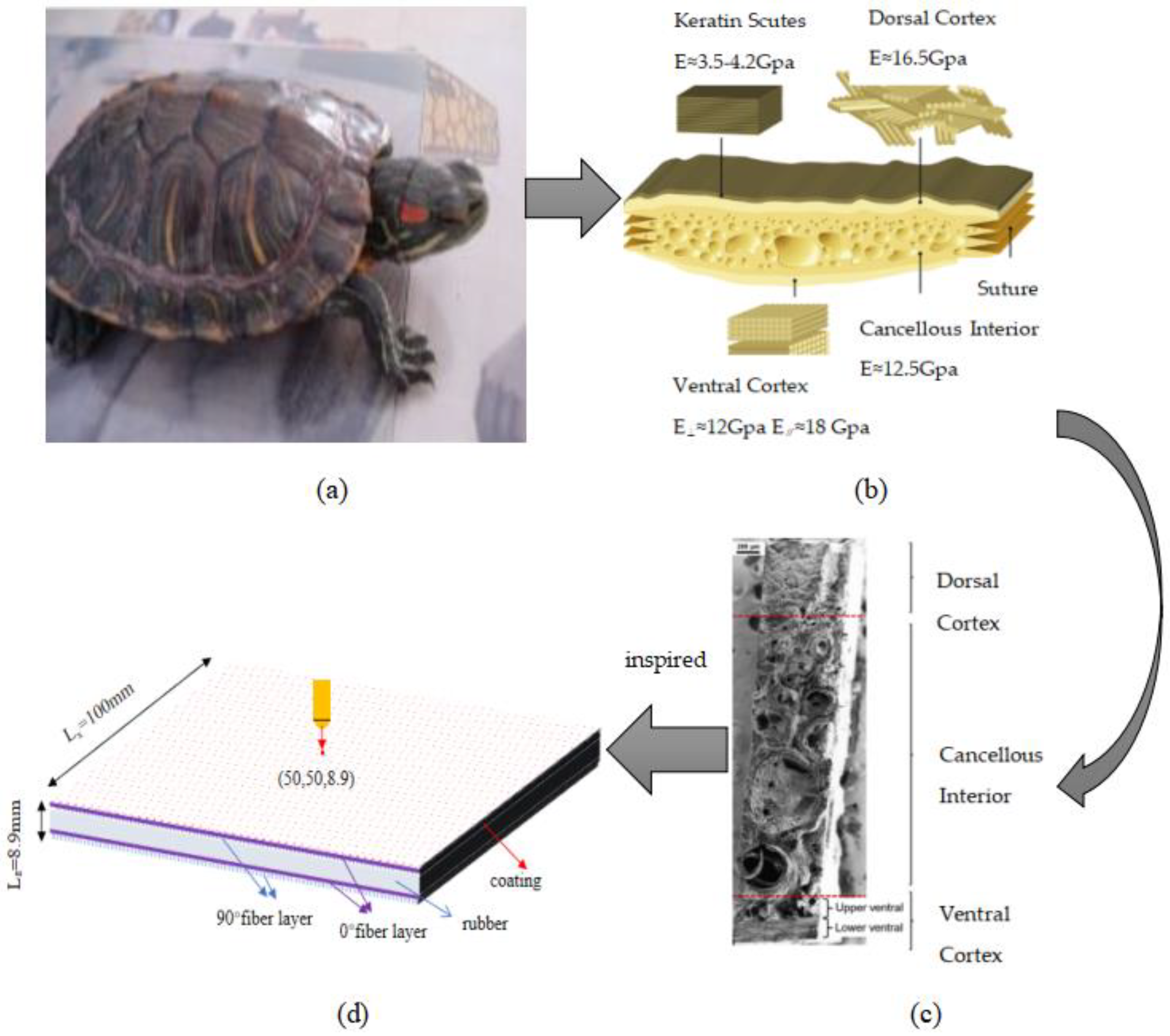
2.1. Bionic Sandwich Structure Design
2.2. Ontological Model and Numerical Simulation Method
2.2.1. Composite Laminate Damage Criterion
2.2.2. Rubber Intrinsic Structure Model and Parameters
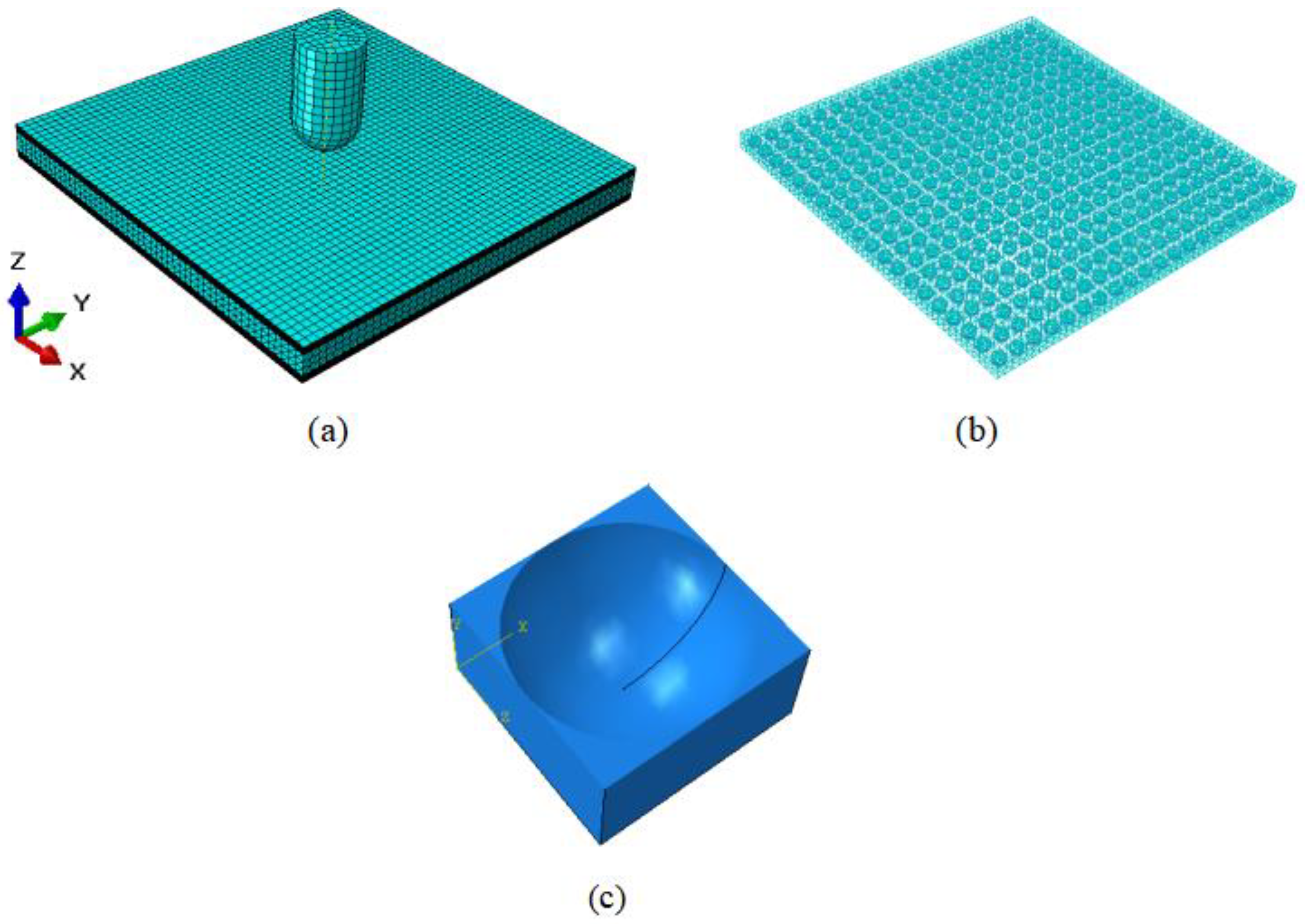
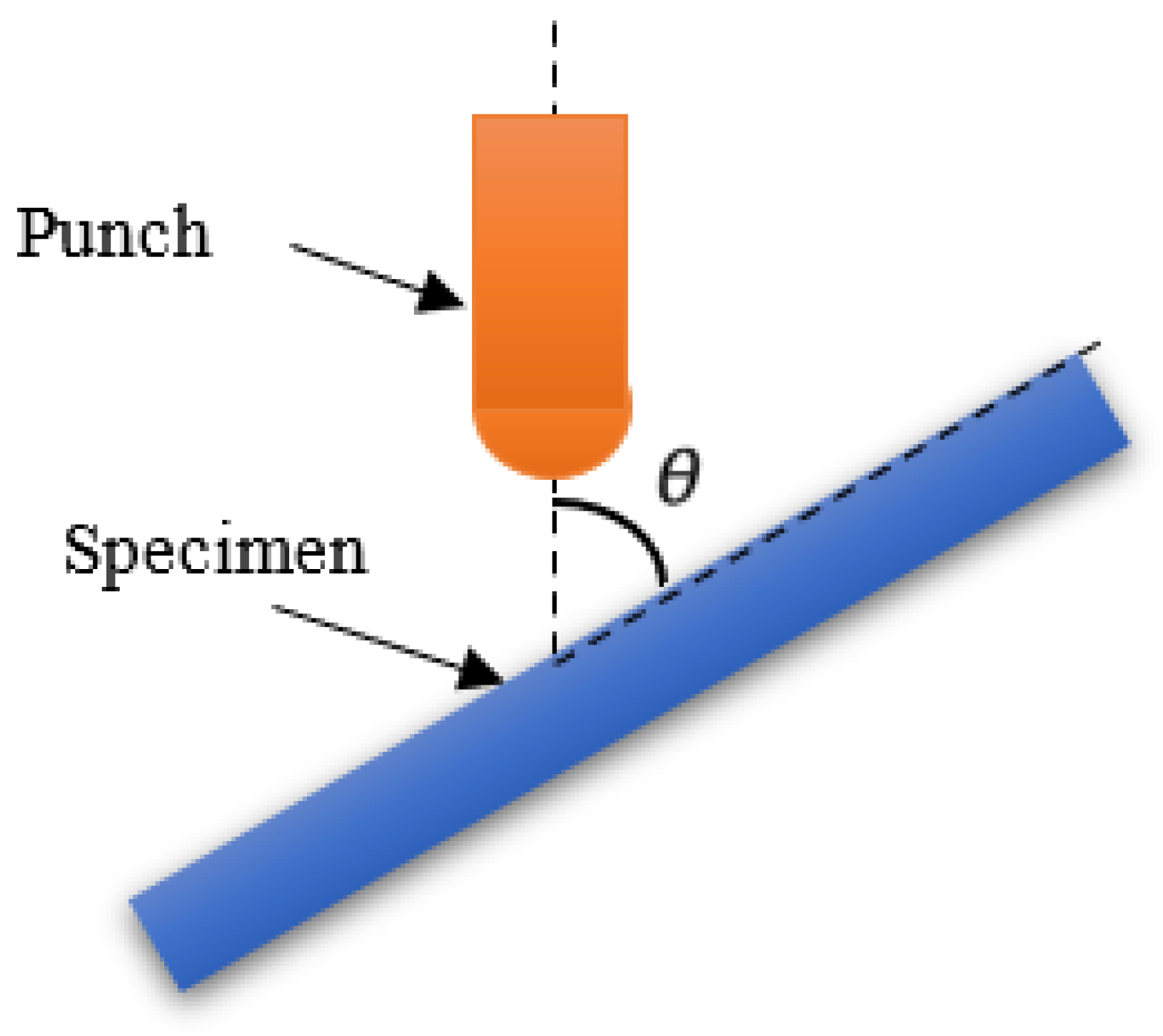
2.2.3. Finite Element Modeling
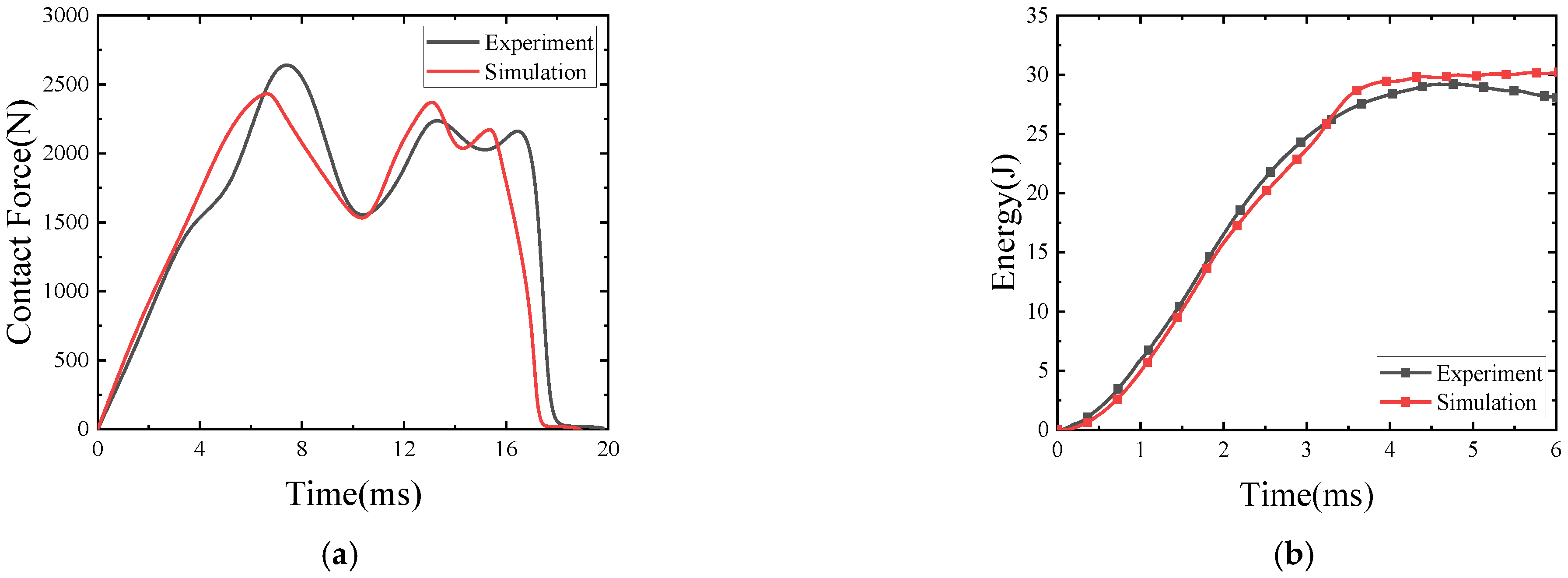
2.3. Model Validation
3. Results and Discussion
3.1. Energy Change
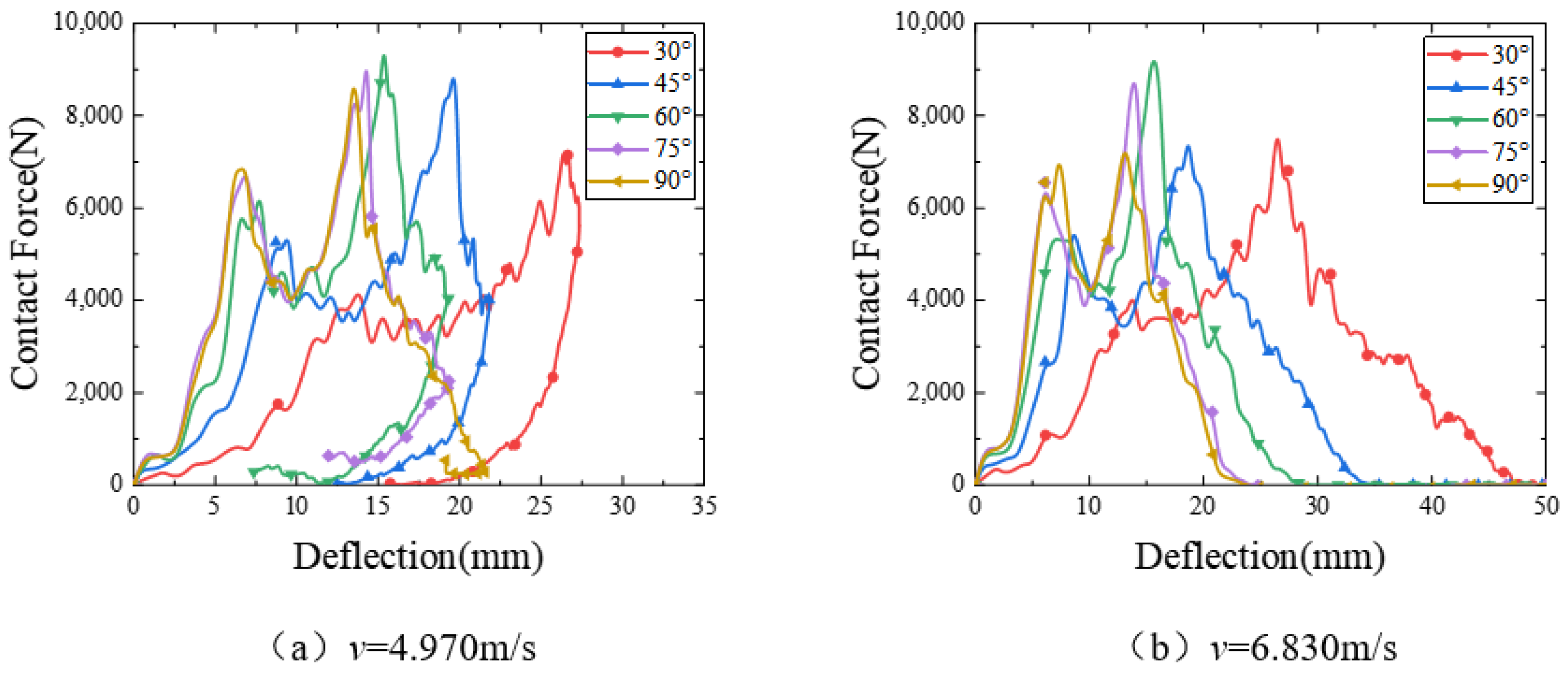
3.2. Mechanical Response Analysis
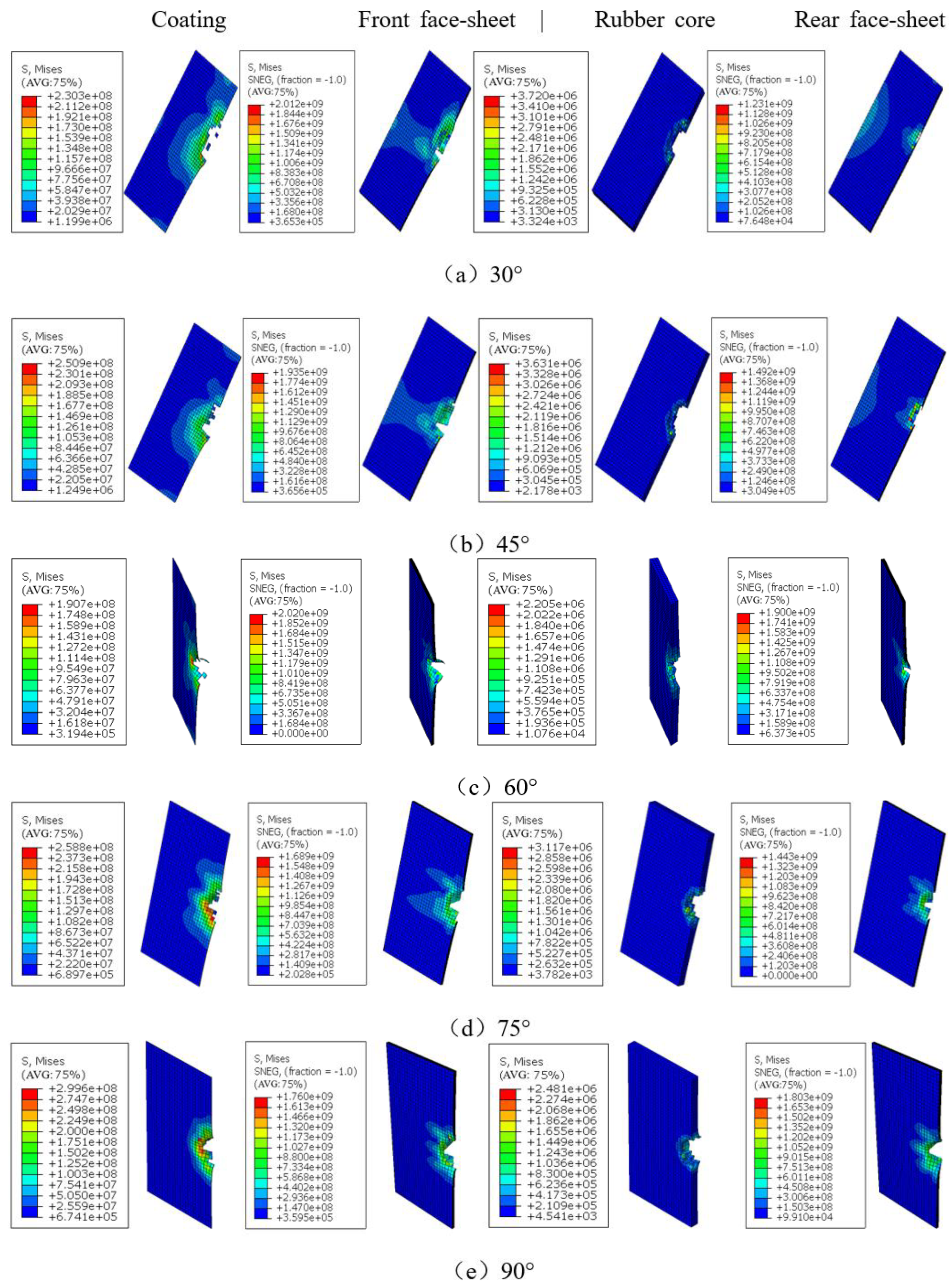
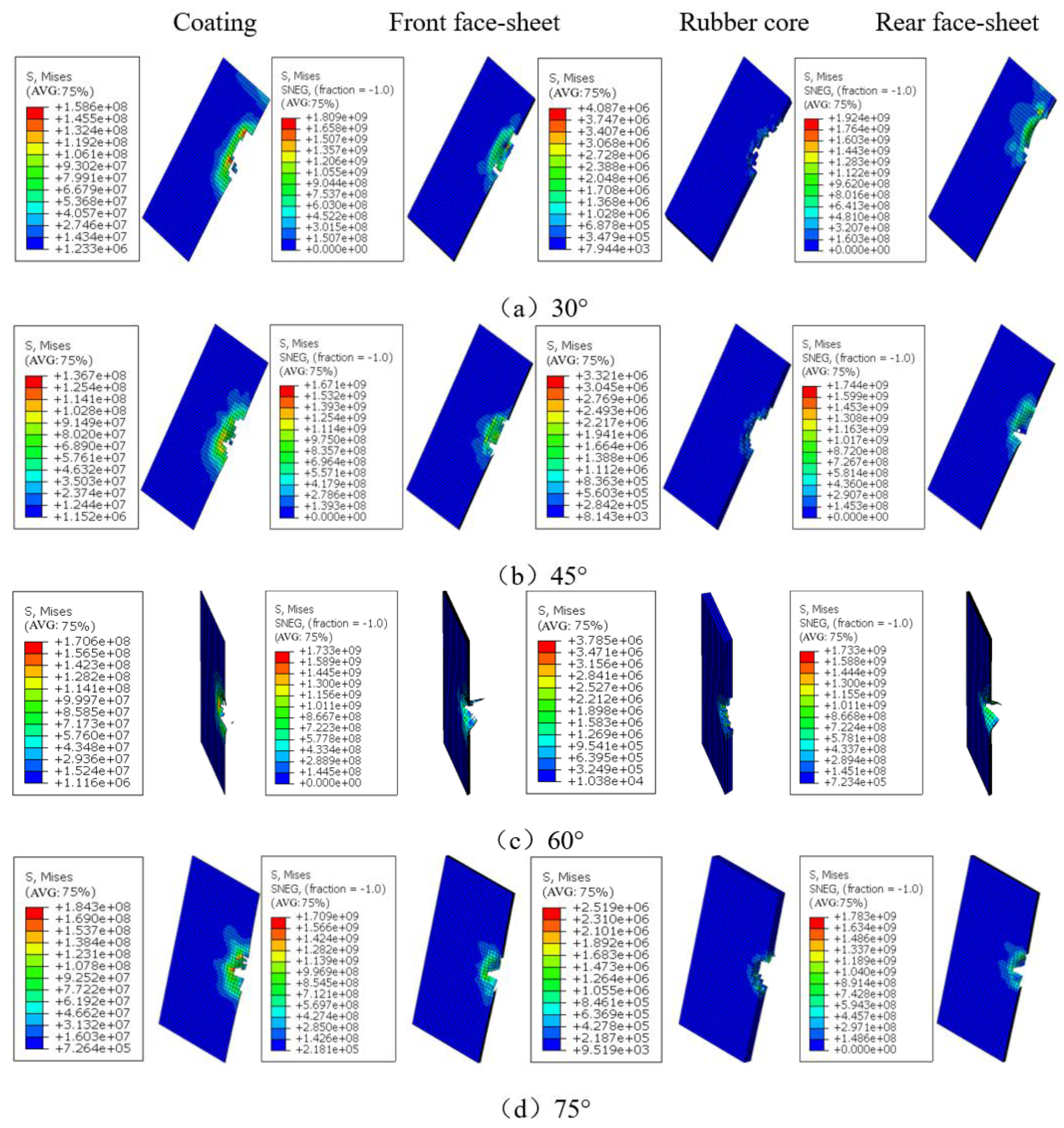
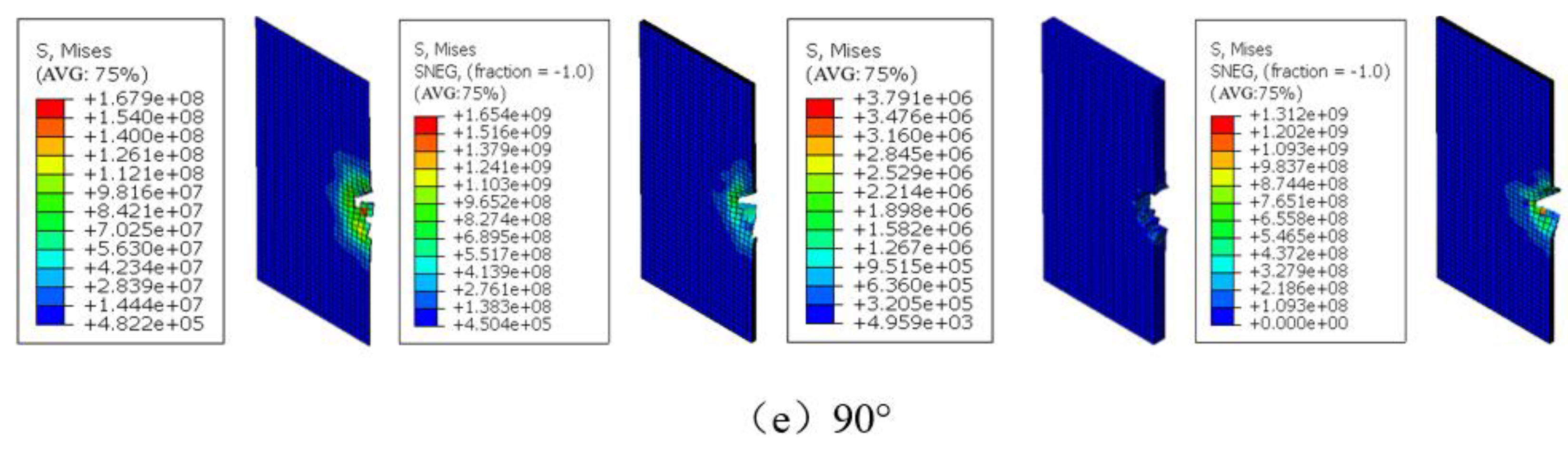
3.3. Failure Modes
4. Conclusions
- Numerical methods for calculating the structure of the foamed silicone rubber sandwich using a rubber intrinsic model with porosity and a three-dimensional Hashin criterion are effective;
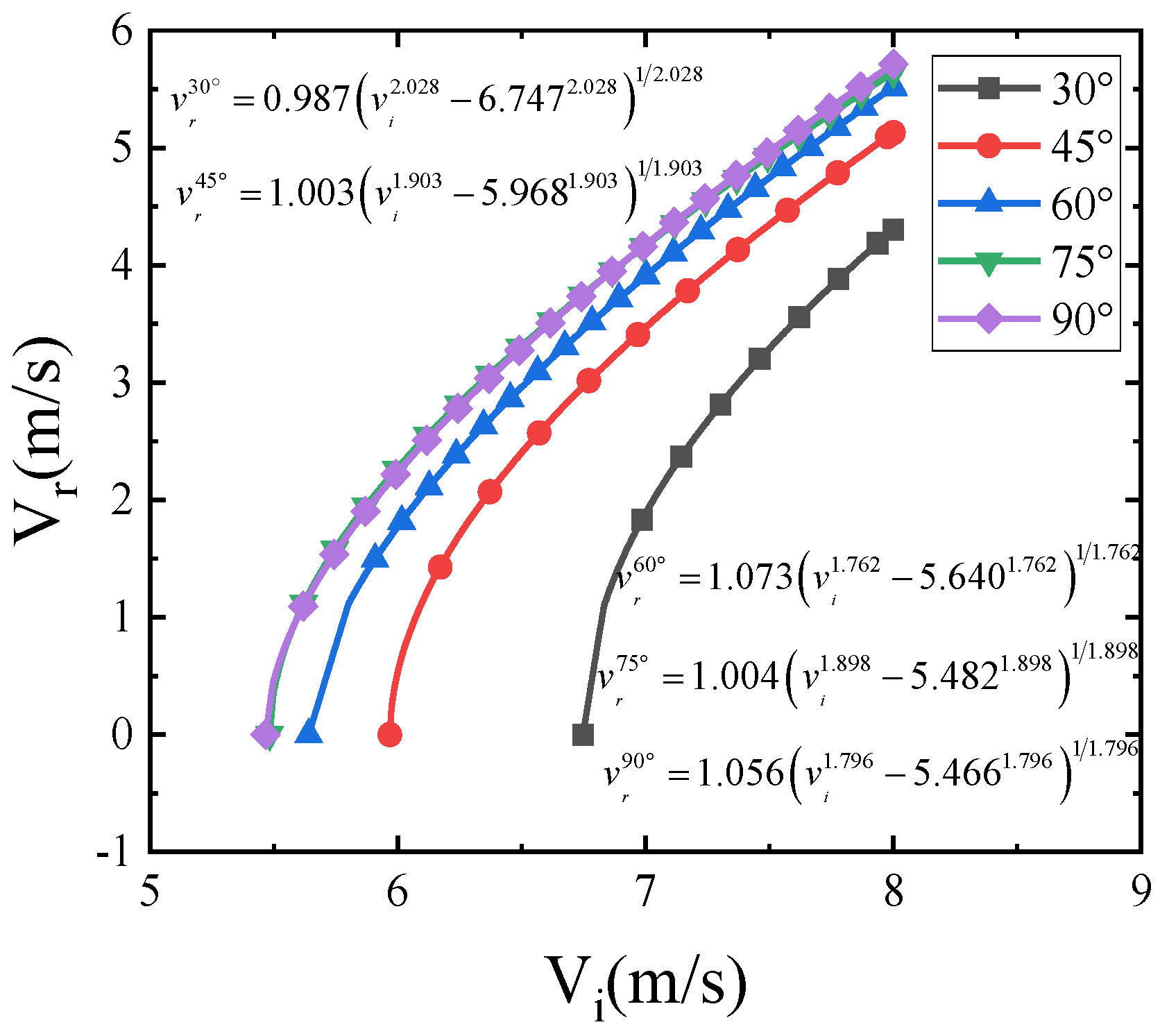
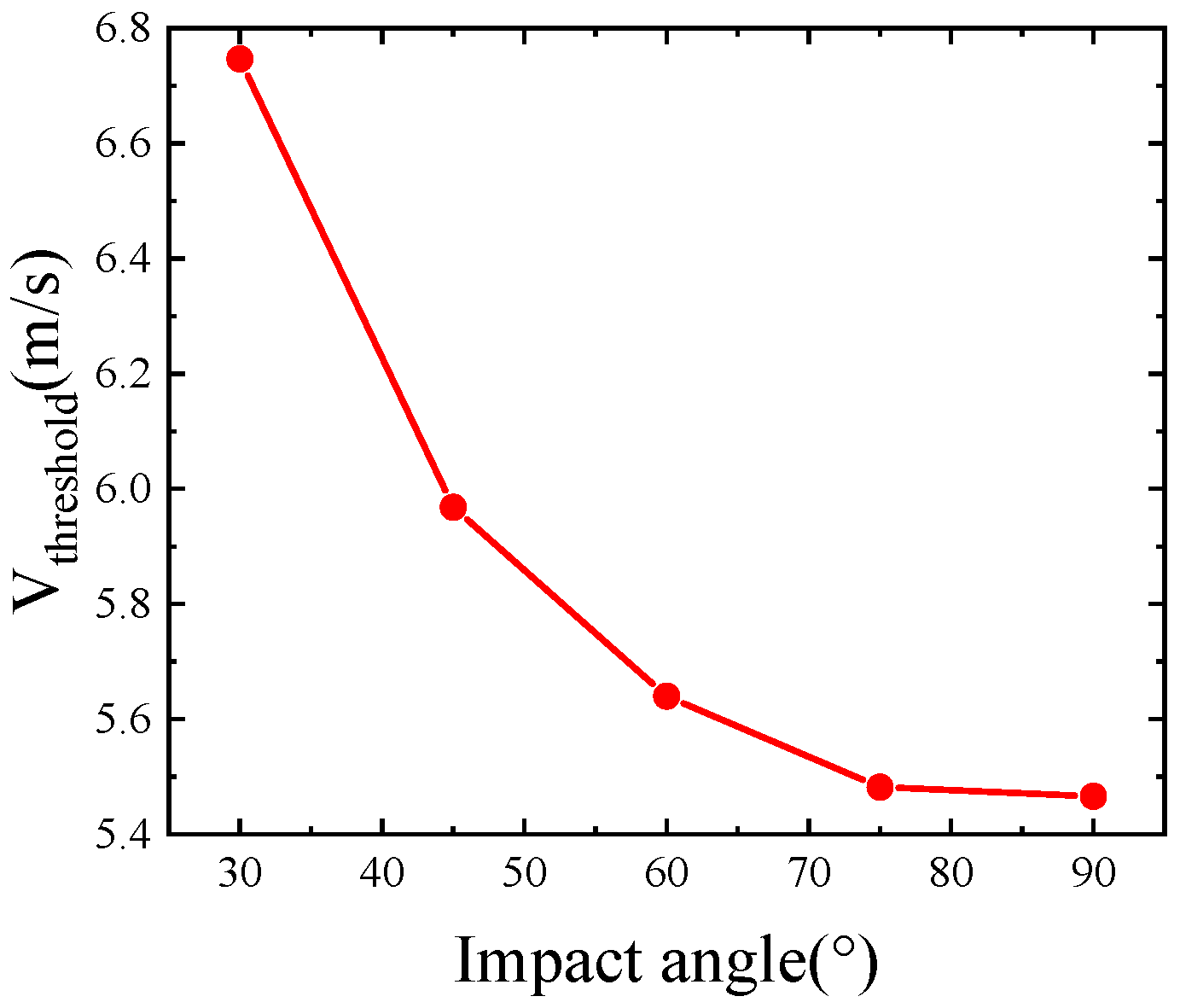
- Based on the simulation data, the curve relationship between the initial velocity and the residual velocity was fitted using the Levenberg–Marquardt optimization algorithm, and the penetration thresholds for impact angles of 30°, 45°, 60°, 75°, and 90° were 6.747 m/s, 5.968 m/s, 5.640 m/s, and 5.482 m/s, and the impact resistance decreased by 11.5%, 16.4%, 18.7%, and 18.9% with the increase of impact angle;
- When the impact angle is greater than 45°, with the impact angle increases, the difference between the impact threshold is smaller and smaller. When the impact angle is greater than 75°, compared with 90°, the impact resistance difference is only 2.9%; at this time, the impact angle has less impact resistance performance;
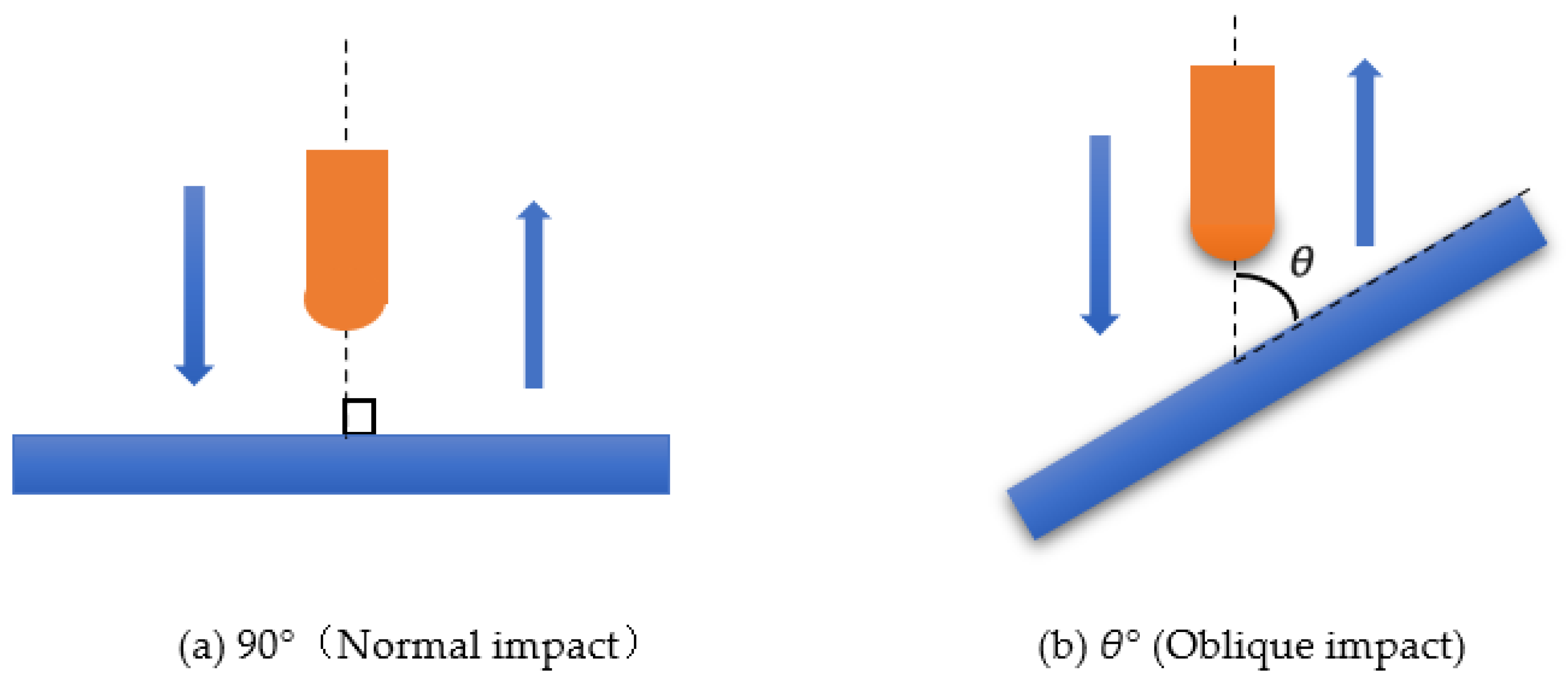
- The impact angle has an obvious effect on the energy absorption characteristics of the rubber sandwich structure. At a certain impact speed, the smaller the impact angle, the longer the path of the falling hammer along the plane of the sandwich structure, the larger the contact area, the lighter the degree of damage, and the greater the energy absorbed by the sandwich structure; therefore, 90° is the most unfavorable impact angle for structural deformation, and avoiding the impact from the front of the sandwich structure can effectively reduce the degree of damage to the sandwich structure;
- The damage patterns of positive impact and oblique impact on the upper panel are different. For positive impact, the upper panel of the sandwich structure had fiber fracture caused by the shearing process. For oblique impact, fiber fracture and multiple cracks were produced at the edge of the falling hammer due to the larger contact area that the falling hammer passed through and then removed a large amount of material from the upper panel.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, A.Y.M.; Meyers, M.A.; Vecchio, K.S. Mechanical properties and structure of Strombus gigas, Tridacna gigas, and Haliotis rufescens sea shells: A comparative study. Mater. Sci. Eng. C 2006, 26, 1380–1389. [Google Scholar] [CrossRef]
- Menig, R.; Meyers, M.H.; Meyers, M.A.; Vecchio, K.S. Quasi-static and dynamic mechanical response of Haliotis rufescens (abalone) shells. Acta Mater. 2000, 48, 2383–2398. [Google Scholar] [CrossRef]
- Menig, R.; Meyers, M.H.; Meyers, M.A.; Vecchio, K.S. Quasi-static and dynamic mechanical response of Strombus gigis (conch) shells. Mater. Sci. Eng. A 2001, 297, 203–211. [Google Scholar] [CrossRef]
- Damiens, R.; Rhee, H.; Hwang, Y.; Park, S.; Hammi, Y.; Lim, H.; Horstemeyer, M. Compressive behavior of a turtle’s shell: Experiment, modeling, and simulation. J. Mech. Behav. Biomed. Mater. 2012, 6, 106–112. [Google Scholar] [CrossRef]
- Jiang, Z.L. Progress from Biomechanics to Mechanobiology. Adv. Mech. 2017, 47, 24. [Google Scholar]
- Achrai, B.; Wagner, H.D. Micro-structure and mechanical properties of the turtle carapace as a biological composite shield. Acta Biomater. 2013, 9, 5890–5902. [Google Scholar] [CrossRef]
- White, Z.; Vernerey, F. Armours for soft bodies: How far can bioinspiration take us? Bioinspiration Biomim. 2018, 13, 041004. [Google Scholar] [CrossRef]
- Zhu, L.M.H. Understanding hydration effects on mechanical and impacting properties of turtle shell. J. Mech. Behav. Biomed. Mater. 2018, 78, 116–123. [Google Scholar]
- Lin, C.; Han, Y.; Guo, C.; Chang, Y.; Han, X.; Lan, L.; Jiang, F. Synthesis and mechanical properties of novel Ti-(SiCf/Al3Ti) ceramic-fiber-reinforced metal-intermetallic-laminated (CFR-MIL) composites. J. Alloys Compd. Interdiscip. J. Mater. Sci. Solid-State Chem. Phys. 2017, 722, 427–437. [Google Scholar] [CrossRef]
- Pei, B.; Guo, L.; Wu, X.; Hu, M.; Wu, S.; Wang, Y. Impact Resistant Structure Design and Optimization Inspired by Turtle Carapace. Materials 2022, 8, 2899. [Google Scholar] [CrossRef]
- Prasad, N.; Murali, G. Research on flexure and impact performance of functionally-graded two-stage fibrous concrete beams of different sizes. Constr. Build. Mater. 2021, 288, 123138. [Google Scholar] [CrossRef]
- Jia-Qi, Q.; Duan, Y.; Cheng, L. Study on dynamic response of aluminum honeycomb sandwich plate under low speed impact. Compos. Mater. Sci. Eng. 2019, 5, 5–11. [Google Scholar]
- Xie, X.; Duan, Y.C.; Qi, J.Q. Influence of Impact Angle on Low Velocity Impact Performance of Aluminum Honeycomb Sandwich Panels. Compos. Mater. Sci. Eng. 2020, 4, 19–27. [Google Scholar]
- Pascal, F.; Dorival, O.; Navarro, P.; Marguet, S.; Ferrero, J.-F. Impact damage prediction in thin woven composite laminates II: Application to normal and oblique impacts on sandwich structure. Compos. Struct. 2018, 190, 43–51. [Google Scholar] [CrossRef]
- Boonkong, T.; Shen, Y.; Guan, Z.; Cantwell, W. The low velocity impact response of curvilinear-core sandwich structures. Int. J. Impact Eng. 2016, 93, 28–38. [Google Scholar] [CrossRef]
- Kai, C.; Jun, L.; Pan, Z. Dynamic response of steel corrugated sandwich plate under low velocity impact load. Ship Sci. Technol. 2018, 40, 27–34. [Google Scholar]
- Hashin, Z.; Rotem, A. A fatigue failure criterion for fiber reinforced materials. Compos. Mater. 1973, 7, 448–464. [Google Scholar] [CrossRef]
- Hashin, Z. Fatigue Failure Criteria for Unidirectional Fiber Composites. J. Appl. Mech. 1981, 48, 846–852. [Google Scholar] [CrossRef]
- Bienias, J.; Jakubczak, P.; Dadej, K. Low-velocity impact resistance of aluminium glass laminates-Experimental and numerical investigation. Compos. Struct. 2016, 152, 339–348. [Google Scholar] [CrossRef]
- Ke, Y.; Wang, S.; Wu, L. Constitutive Model and Mechanical Performance of Foamed Silicone Rubber. Rubber Ind. 2019, 66, 177–183. [Google Scholar] [CrossRef]
- Danielsson, M.; Parks, D.M.; Boyce, M.C. Constitutive modeling of porous hyperelastic materials. Mech. Mater. 2004, 36, 347–358. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value | Units |
|---|---|---|---|
| Young’s modulus | E11, E22, E33 | 135, 8.8, 8.8 | GPa |
| Poisson’s ratio | v12, v13, v23 | 0.33, 0.33, 0.35 | _ |
| Shear modulus | G12, G13, G23 | 4.47, 4.47, 4.0 | GPa |
| Ultimate tensile stress | XT, YT, ZT | 1548, 55.8, 55.8 | MPa |
| Ultimate compressive stress | XC, YC, ZC | 1226, 131, 131 | MPa |
| Ultimate shear stress | S12, S13, S23 | 89.9, 89.9, 51.2 | MPa |
| θ Vi (m/s) | 30 vr (m/s) | 45 vr (m/s) | 60 vr (m/s) | 75 vr (m/s) | 90 vr (m/s) |
|---|---|---|---|---|---|
| 4.970 | −1.445 | −1.365 | −1.308 | −0.921 | −0.433 |
| 5.495 | −0.854 | −0.738 | −0.153 | 0.321 | 0.431 |
| 5.973 | −0.766 | 0.190 | 1.66411 | 2.185 | 2.170 |
| 6.419 | −0.143 | 2.255 | 2.814 | 3.176 | 3.083 |
| 6.830 | 1.082 | 3.089 | 3.603 | 3.910 | 3.959 |
| 8.000 | 4.327 | 5.119 | 5.518 | 5.634 | 5.696 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, D.; Dong, H.; Zhao, S.; Yan, W.; Wang, Z. Effect of Impact Angle on the Impact Mechanical Properties of Bionic Foamed Silicone Rubber Sandwich Structure. Polymers 2023, 15, 688. https://doi.org/10.3390/polym15030688
Zhang D, Dong H, Zhao S, Yan W, Wang Z. Effect of Impact Angle on the Impact Mechanical Properties of Bionic Foamed Silicone Rubber Sandwich Structure. Polymers. 2023; 15(3):688. https://doi.org/10.3390/polym15030688
Chicago/Turabian StyleZhang, Di, Hui Dong, Shouji Zhao, Wu Yan, and Zhenqing Wang. 2023. "Effect of Impact Angle on the Impact Mechanical Properties of Bionic Foamed Silicone Rubber Sandwich Structure" Polymers 15, no. 3: 688. https://doi.org/10.3390/polym15030688
APA StyleZhang, D., Dong, H., Zhao, S., Yan, W., & Wang, Z. (2023). Effect of Impact Angle on the Impact Mechanical Properties of Bionic Foamed Silicone Rubber Sandwich Structure. Polymers, 15(3), 688. https://doi.org/10.3390/polym15030688