_Yang.png)
Structural Health Monitoring Impact Classification Method Based on Bayesian Neural Network



Abstract
:1. Introduction
2. Machine Learning Methodologies
3. Fundamental of Bayesian Neural Network
3.1. Bayesian Neural Network
3.1.1. Probabilistic Model
3.1.2. Variational Inference
3.1.3. Training and Prediction
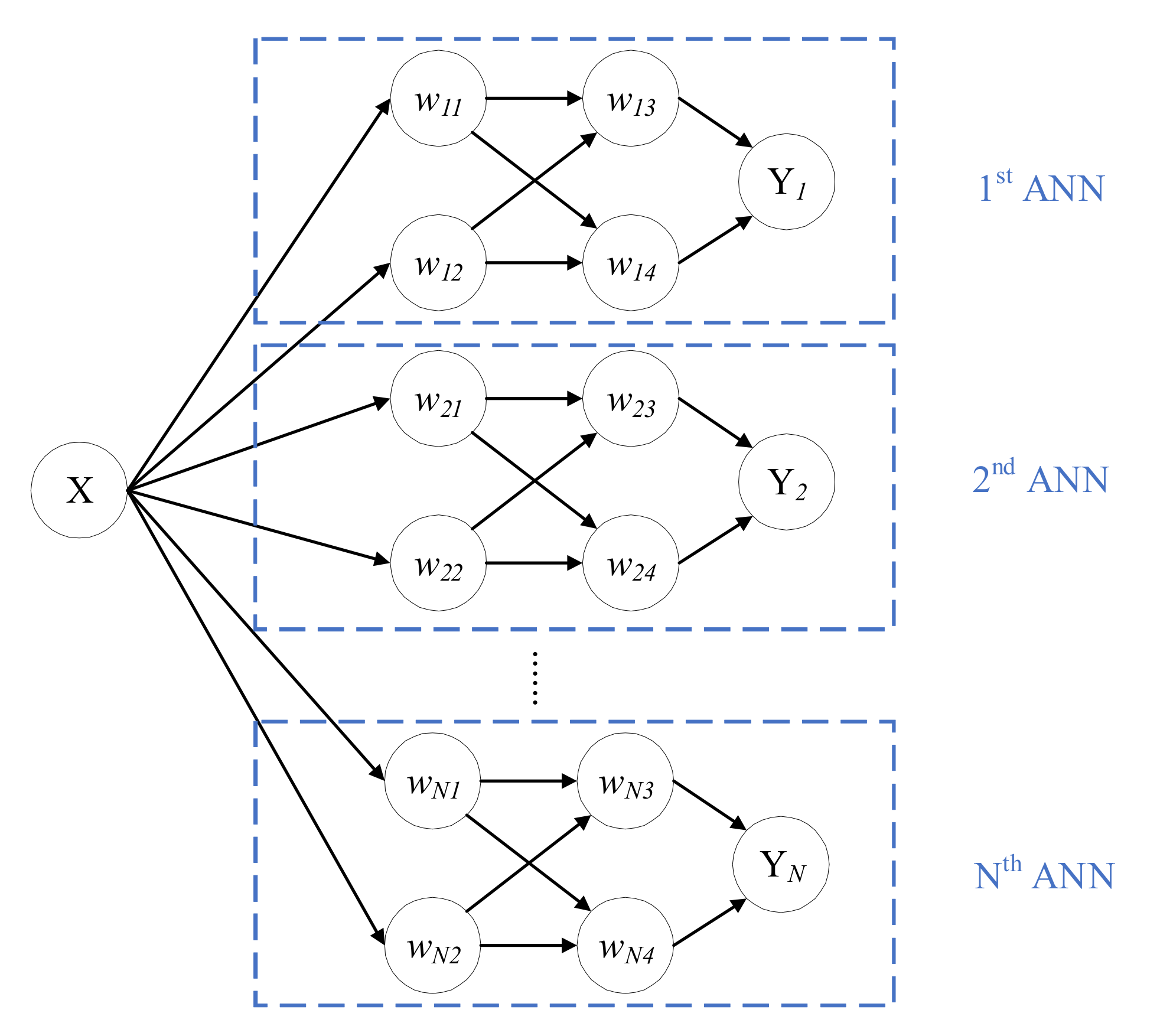
3.2. Multi-Artificial Neural Network
4. Data Acquisition and Pre-Processing
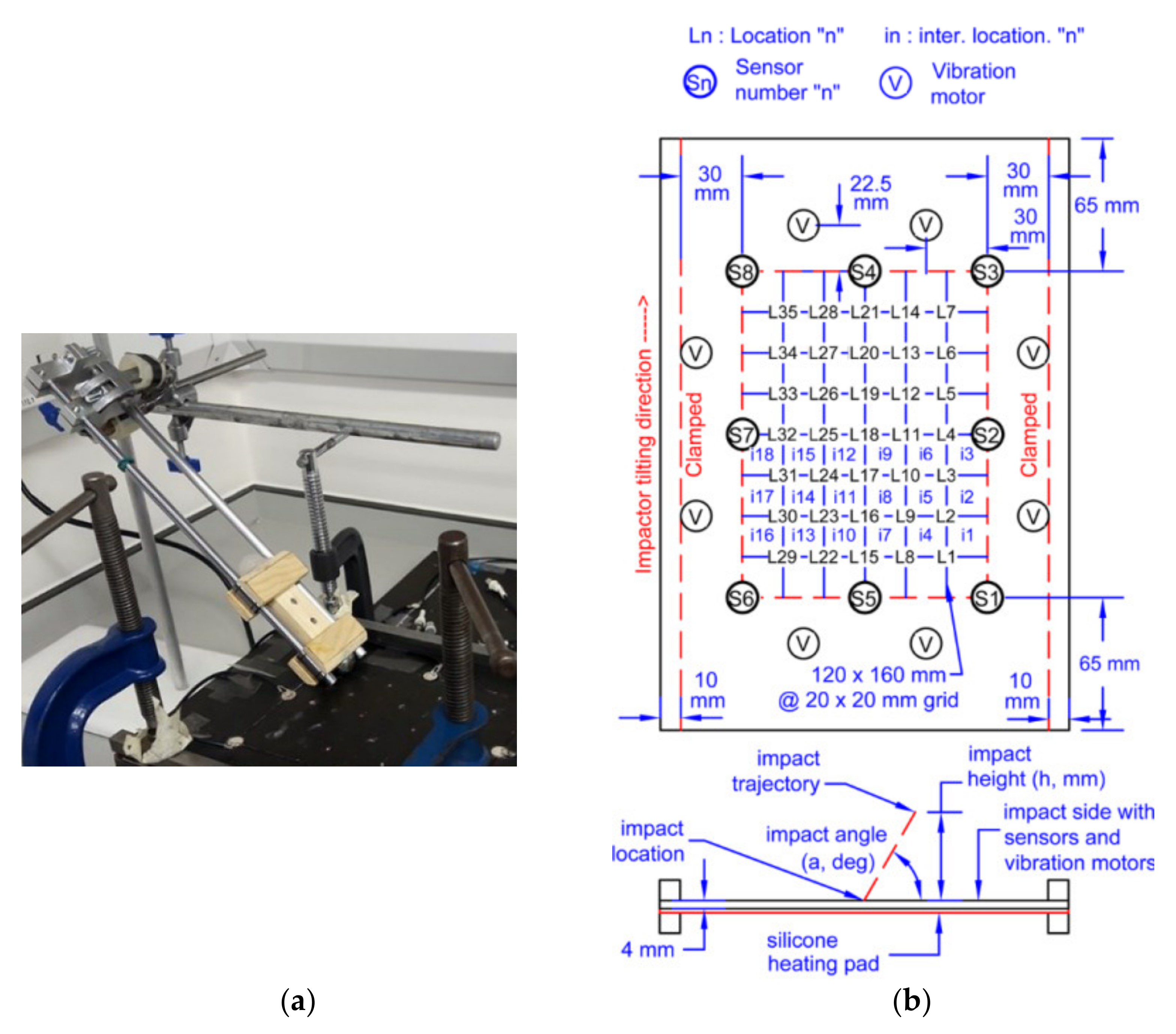
4.1. Experimental Setup
4.2. Data Pre-Processing
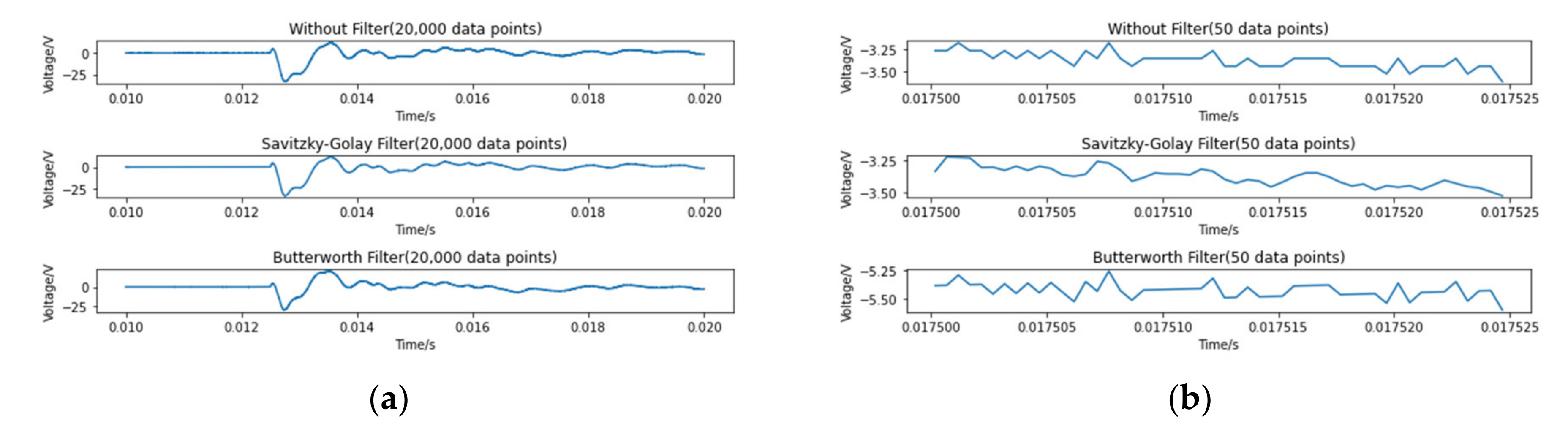
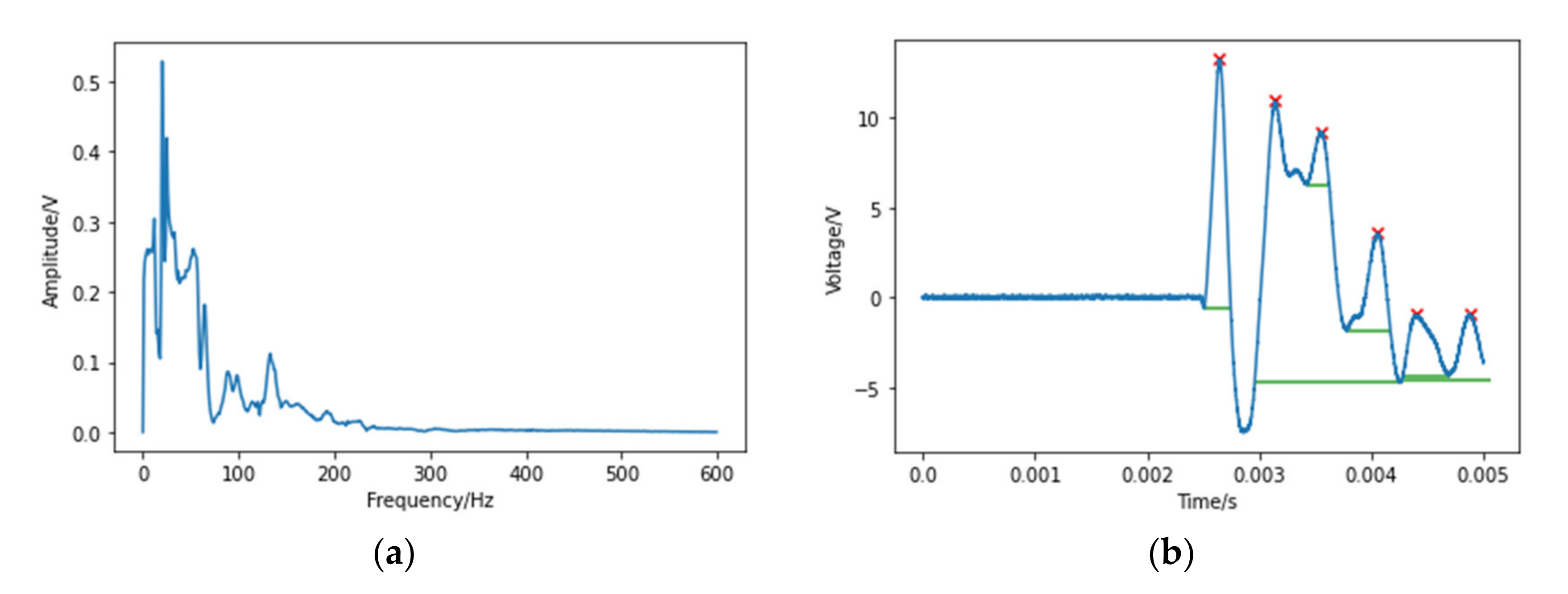
4.2.1. Noise Reduction
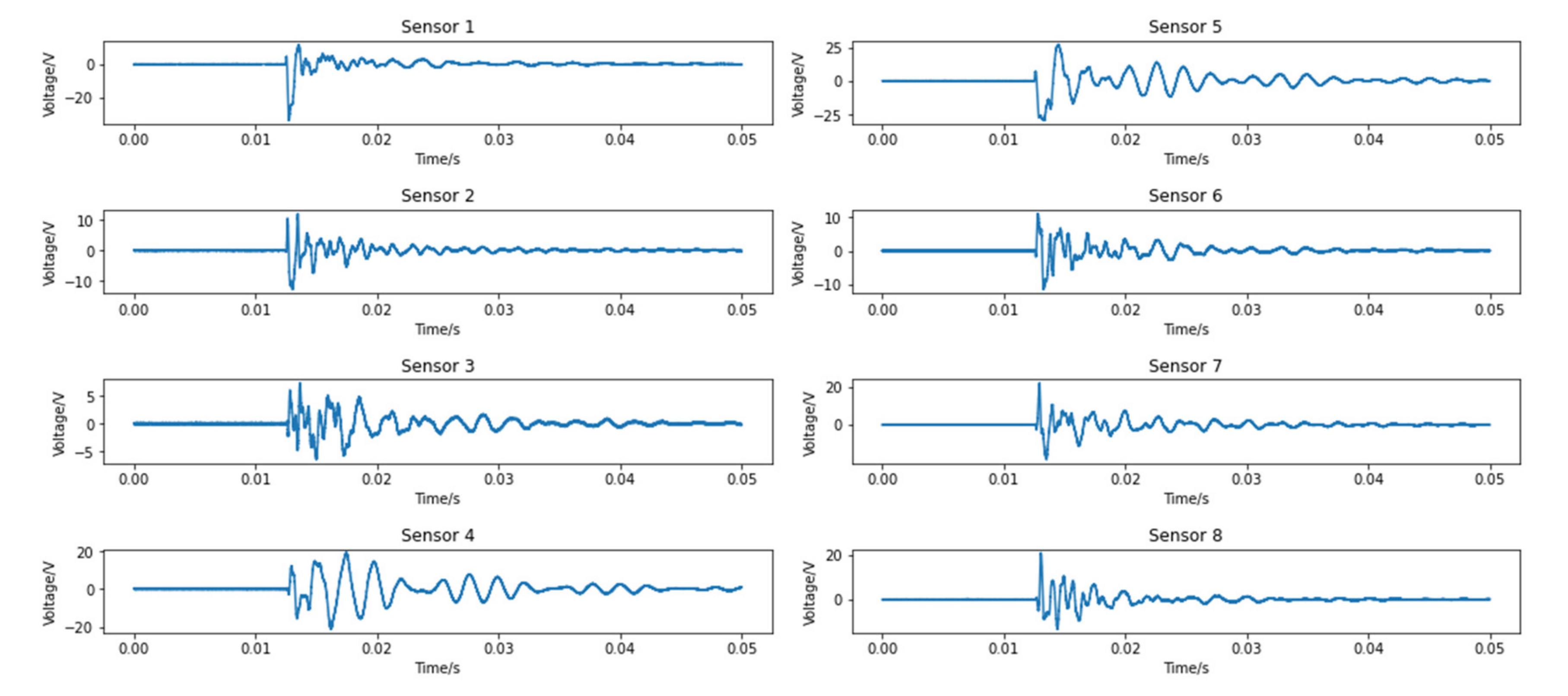
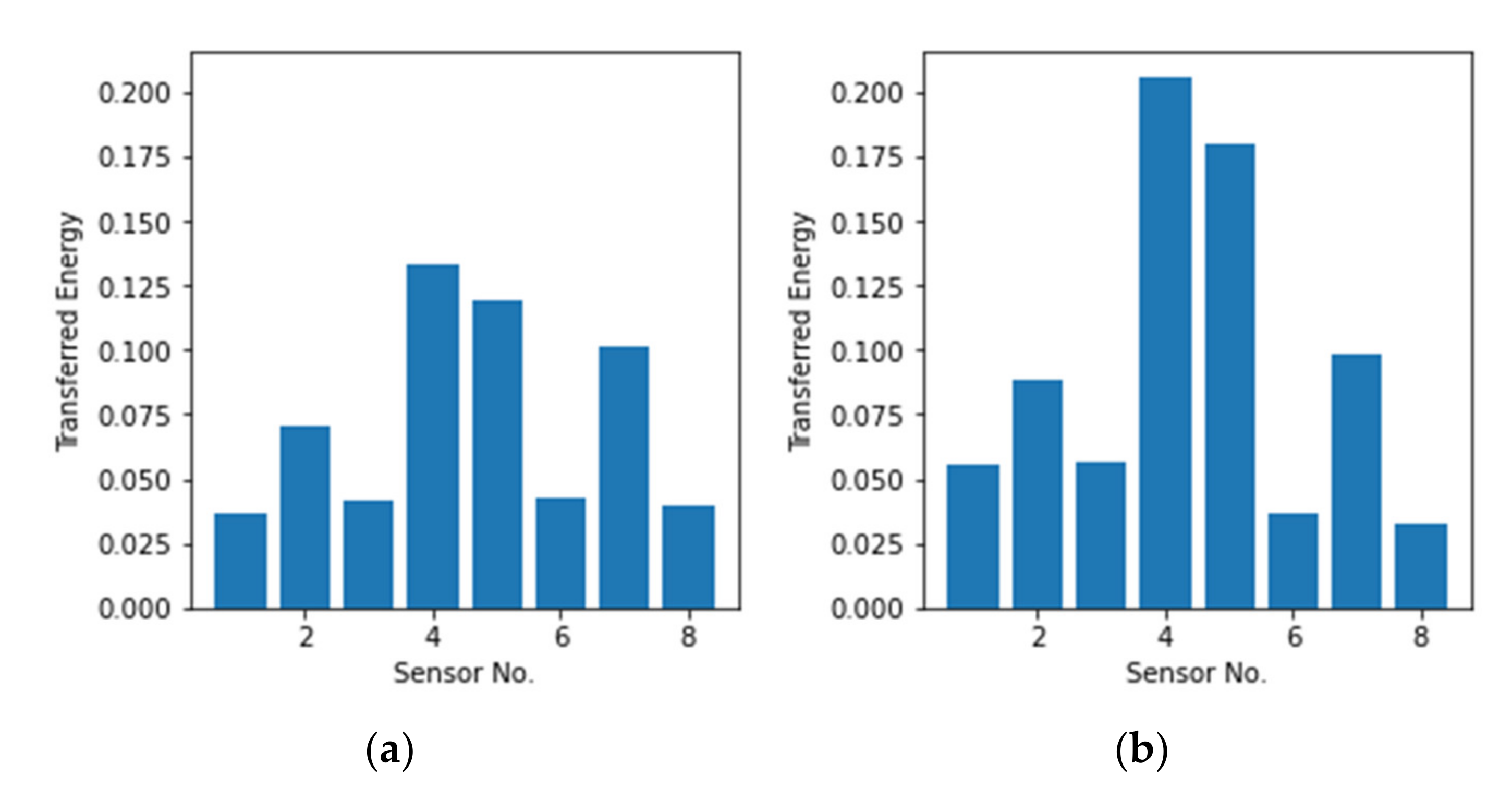
4.2.2. Feature Extraction
5. Results and Discussion
5.1. Perpendicular Impacts
5.1.1. Single ANN
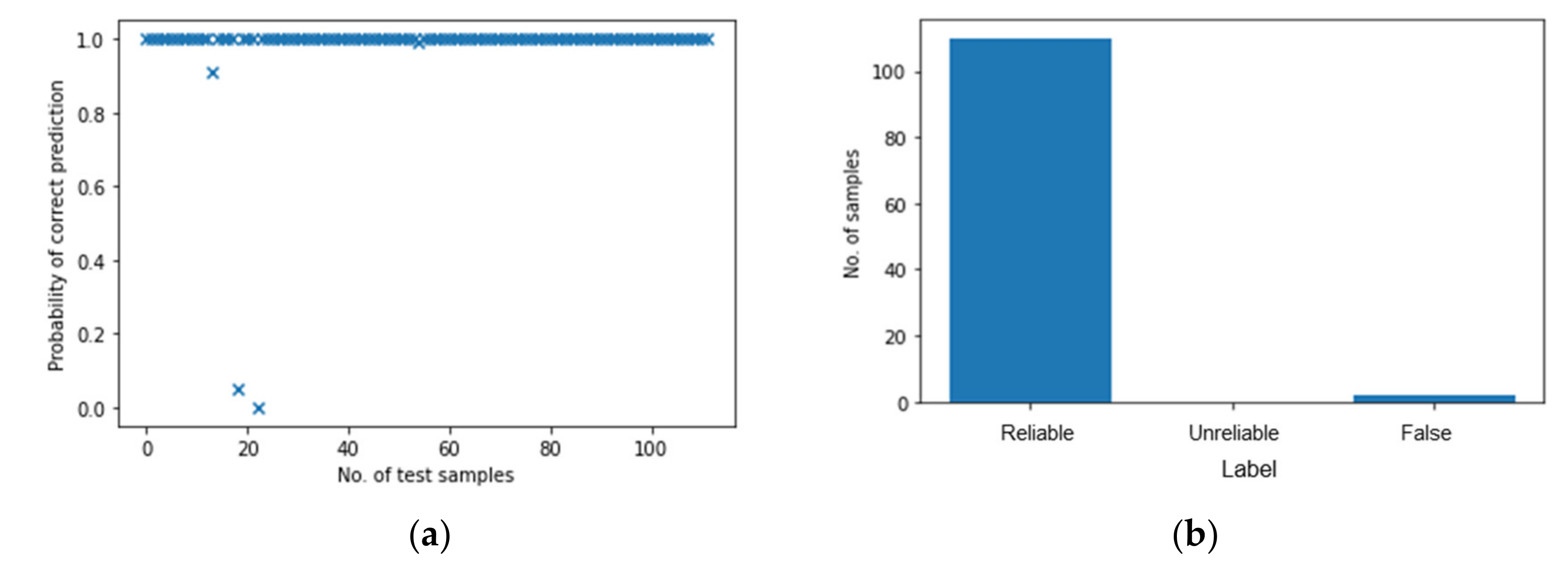
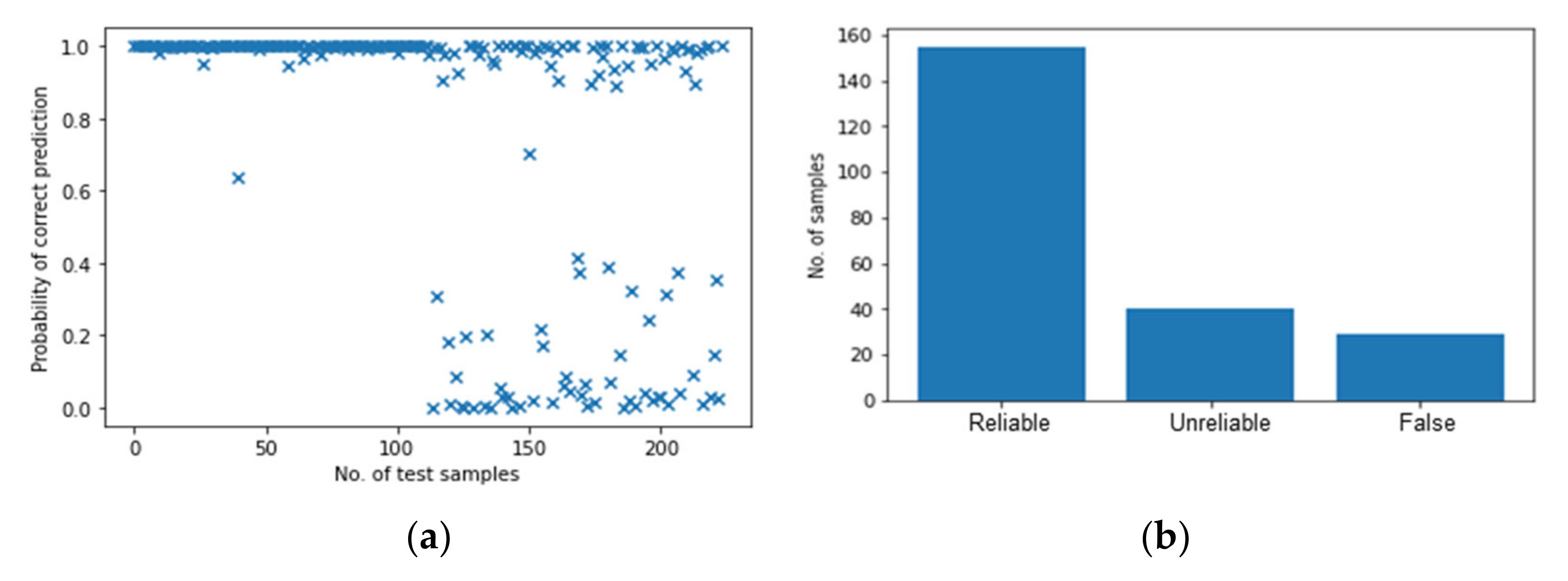
5.1.2. Bayesian Neural Network
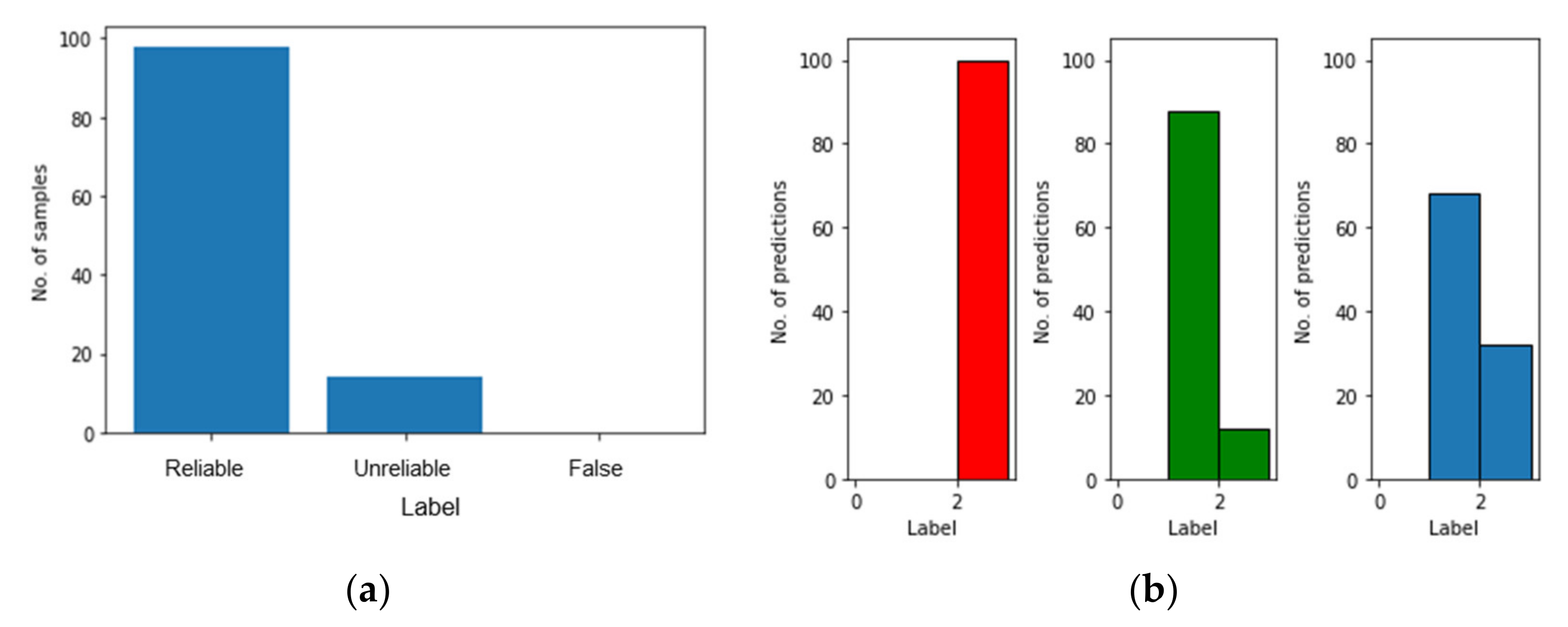
- Reliable
- Unreliable
- False
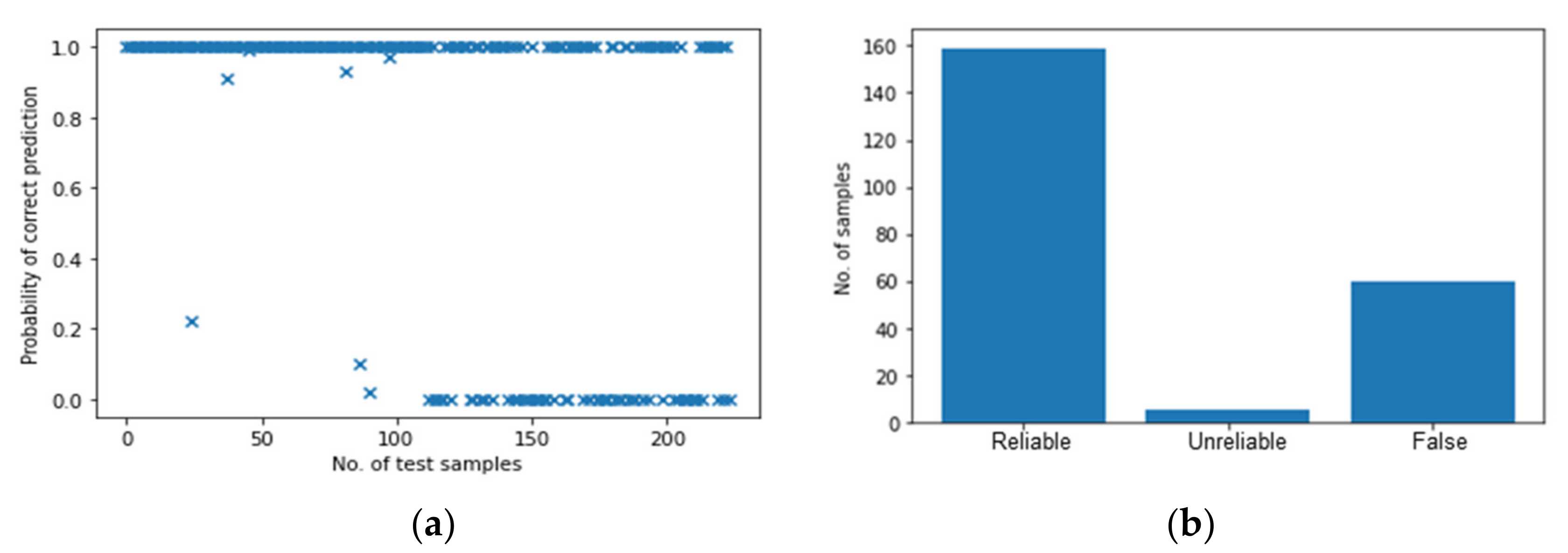
5.1.3. Multi-ANN
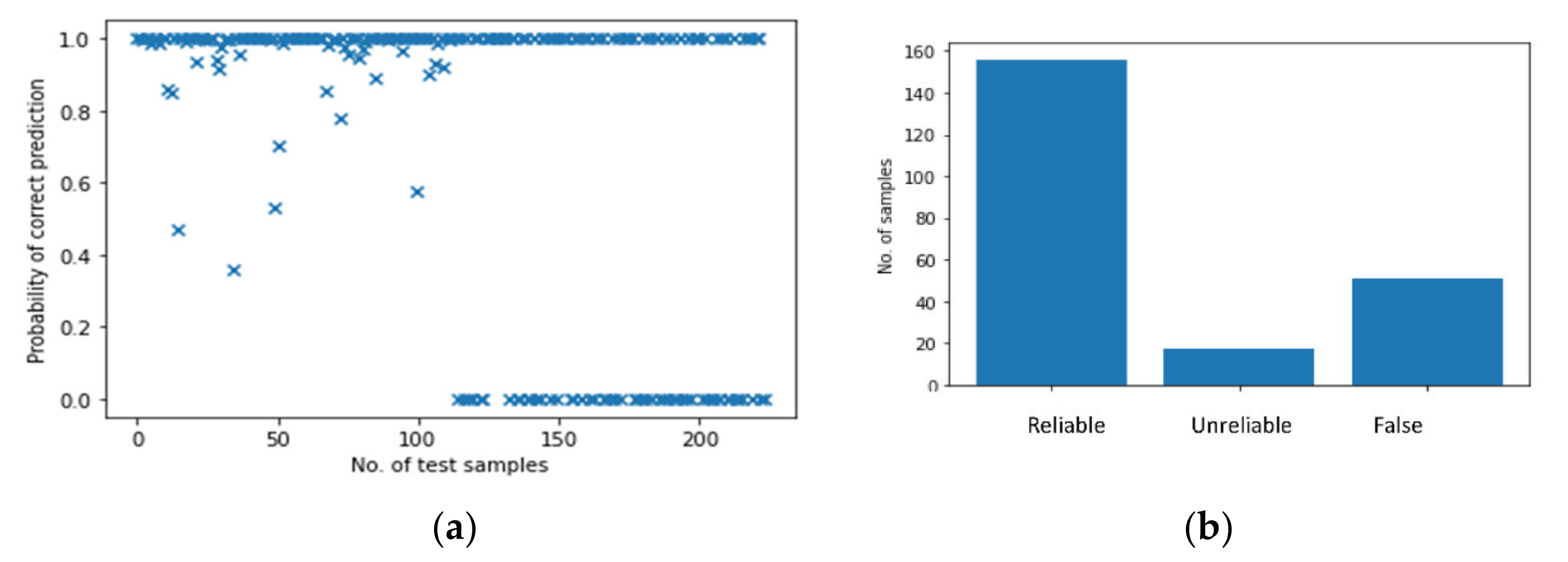
5.2. Angled Impacts
5.2.1. Single Feature
5.2.2. Multiple Features
6. Conclusions
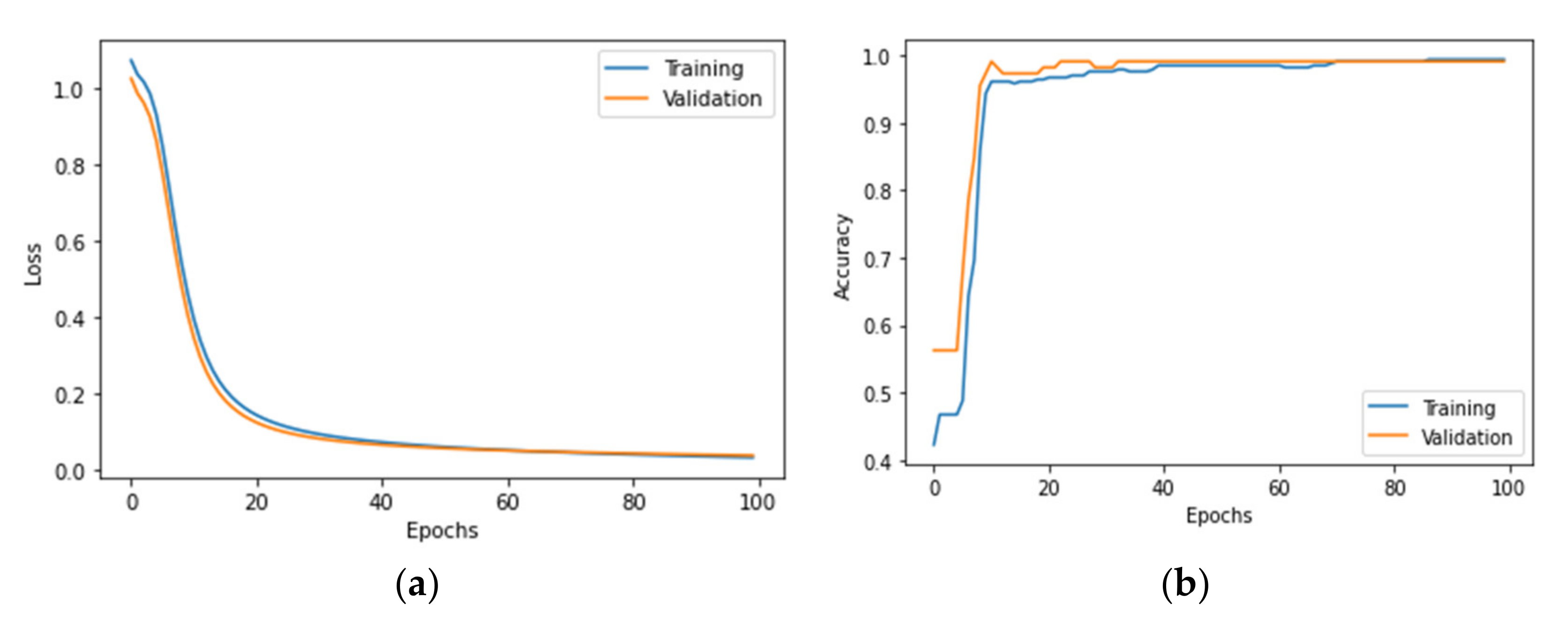
- Both the BNN and single ANN can classify energy levels of perpendicular impacts with high accuracy using the feature of transferred energy, although the accuracy of the single ANN is higher than that of the BNN.
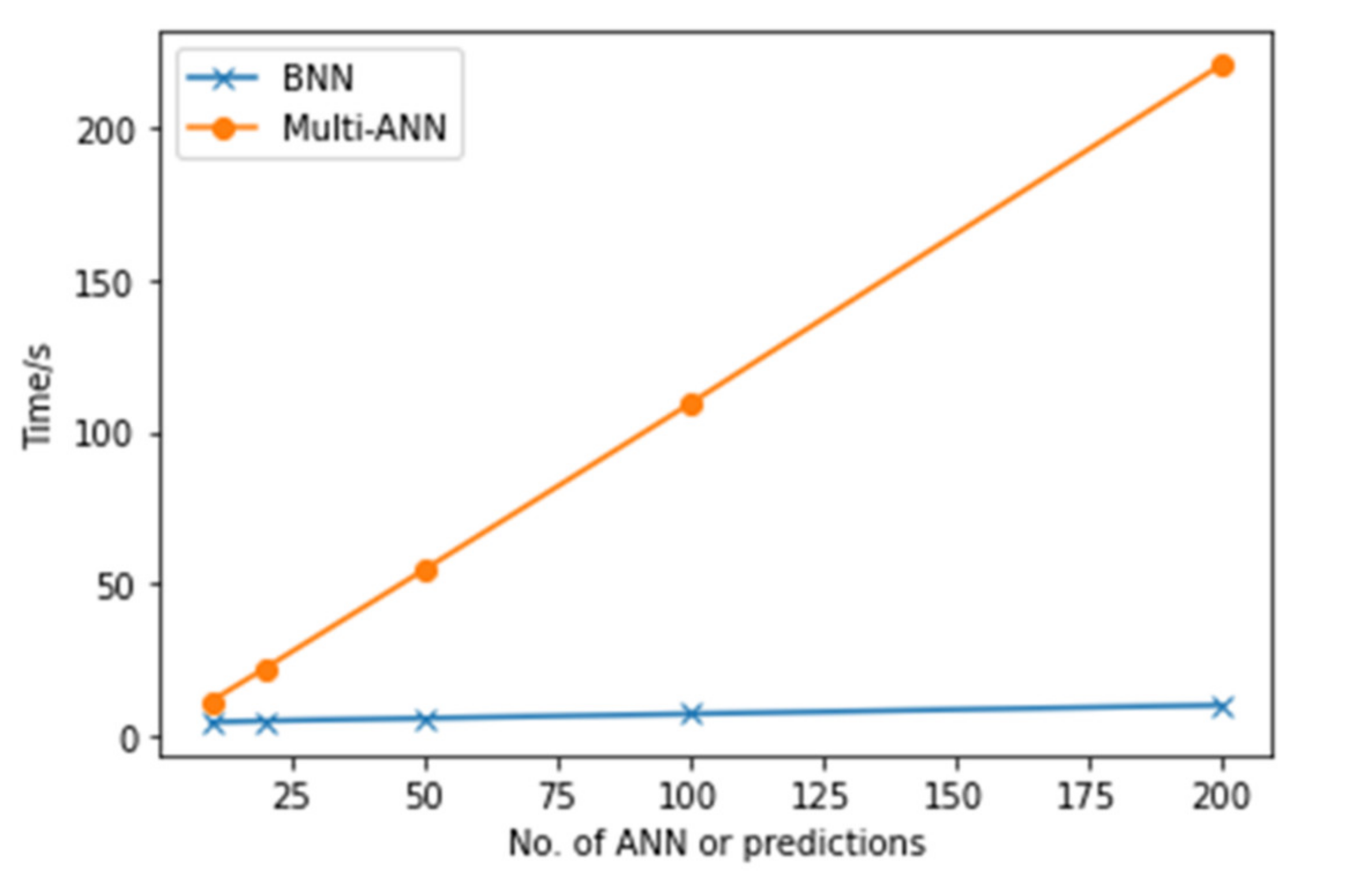
- Both the BNN and multi-ANN can quantify the uncertainty in the mode and calculate the confidence of predicted outcomes. For perpendicular impacts, the confidence of predicted outcomes in the multi-ANN is higher than that in the BNN, while the time and computational resource cost of the multi-ANN are significantly larger than those of the BNN.
- The time and computational resource cost of the multi-ANN increase linearly as the number of ANN used increases, while the cost of the BNN remains stable as the number of Monte Carlo sampling increases. For 100 ANN and 100 times Monte Carlo sampling, the cost of the multi-ANN is significantly larger than that of the BNN.
- For angled impacts, both the BNN and multi-ANN can only reach the accuracy of nearly 50% with the feature of transferred energy, while the multi-ANN tends to make more “False” predictions.
- The dynamics response that the perpendicular and inclined impacts generate in the plate are very different, even if they are of the same mass and height; therefore, if a metamodel is developed for perfect impact scenarios in the laboratory condition (i.e., perpendicular impacts), it cannot predict inclined impacts with high accuracy. It is observed that including other features that can directly relate to the characteristic response that each impact scenario generates in the structure, can improve the results, but this needs to be further investigated, including more variability in the impact scenarios. This conclusion also follows the findings in [22] where two step classification is proposed. Therefore, future work will investigate the variability not only of impact angle but also impactor material, mass and size to represent a more realistic variability.
- The mixed features of transferred energy and frequency at maximum amplitude cannot be used to predict energy levels of angled impacts as the results are totally random. The mixed features of transferred energy and time interval of the largest peak show a potential to help to identify both the angled and perpendicular impacts as the number of “False” predictions for angled impacts and “Unreliable” predictions for perpendicular impacts decreases meanwhile.
Author Contributions
Funding
Conflicts of Interest
References
- Soutis, C. Progress in aerospace sciences. Fibre Reinf. Compos. Aircr. Constr. 2005, 41, 143–151. [Google Scholar]
- Mardanshahi, A.; Nasir, V.; Kazemirad, S.; Shokrieh, M. Detection and classification of matrix cracking in laminated composites using guided wave propagation and artificial neural networks. Compos. Struct. 2020, 246, 112403. [Google Scholar] [CrossRef]
- Petit, S.; Bouvet, C.; Bergerot, A.; Barrau, J.-J. Impact and compression after impact experimental study of a composite laminate with a cork thermal shield. Compos. Sci. Technol. 2007, 67, 3286–3299. [Google Scholar] [CrossRef]
- Steiner, K.V.; Eduljee, R.F.; Huang, X.; Gillespie, J.W., Jr. Ultrasonic NDE techniques for the evaluation of matrix cracking in composite laminates. Compos. Sci. Technol. 1995, 53, 193–198. [Google Scholar] [CrossRef]
- Johnson, M. Waveform based clustering and classification of AE transients in composite laminates using principal component analysis. Ndt E Int. 2002, 35, 367–376. [Google Scholar] [CrossRef]
- Tabian, I.; Fu, H.; Sharif Khodaei, Z. A convolutional neural network for impact detection and characterization of complex composite structures. Sensors 2019, 19, 4933. [Google Scholar] [CrossRef] [PubMed]
- Aliabadi, M.F.; Khodaei, Z.S. Structural Health Monitoring for Advanced Composite Structures; World Scientific: Singapore, 2017; Volume 8. [Google Scholar]
- Yan, G.; Sun, H.; Büyüköztürk, O. Impact load identification for composite structures using Bayesian regularization and unscented Kalman filter. Struct. Control. Health Monit. 2017, 24, e1910. [Google Scholar] [CrossRef]
- Ghobadi, A. Common type of damages in composites and their inspections. World J. Mech. 2017, 7, 24–33. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 303–315. [Google Scholar] [CrossRef]
- Fu, H.; Khodaei, Z.S.; Aliabadi, M.F. An Event-Triggered Energy-Efficient Wireless Structural Health Monitoring System for Impact Detection in Composite Airframes. IEEE Internet Things J. 2018, 6, 1183–1192. [Google Scholar] [CrossRef]
- Ihn, J.-B.; Chang, F.-K. Pitch-catch active sensing methods in structural health monitoring for aircraft structures. Struct. Health Monit. 2008, 7, 5–19. [Google Scholar] [CrossRef]
- Alleyne, D.N.; Cawley, P. The interaction of Lamb waves with defects. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1992, 39, 381–397. [Google Scholar] [CrossRef]
- Zhang, S.; Li, C.M.; Ye, W. Damage localization in plate-like structures using time-varying feature and one-dimensional convolutional neural network. Mech. Syst. Signal Process. 2021, 147, 107107. [Google Scholar] [CrossRef]
- Qian, C.; Ran, Y.; He, J.; Ren, Y.; Sun, B.; Zhang, W.; Wang, R. Application of artificial neural networks for quantitative damage detection in unidirectional composite structures based on Lamb waves. Adv. Mech. Eng. 2020, 12, 1687814020914732. [Google Scholar] [CrossRef]
- Morse, L.; Khodaei, Z.S.; Aliabadi, M. Reliability based impact localization in composite panels using Bayesian updating and the Kalman filter. Mech. Syst. Signal Process. 2018, 99, 107–128. [Google Scholar] [CrossRef]
- De Oliveira, M.A.; Monteiro, A.V.; Vieira Filho, J. A new structural health monitoring strategy based on PZT sensors and convolutional neural network. Sensors 2018, 18, 2955. [Google Scholar] [CrossRef] [PubMed]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R.X. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Sharif-Khodaei, Z.; Ghajari, M.; Aliabadi, M. Determination of impact location on composite stiffened panels. Smart Mater. Struct. 2012, 21, 105026. [Google Scholar] [CrossRef]
- Ghajari, M.; Sharif-Khodaei, Z.; Aliabadi, M.; Apicella, A. Identification of impact force for smart composite stiffened panels. Smart Mater. Struct. 2013, 22, 085014. [Google Scholar] [CrossRef]
- Mallardo, V.; Sharif Khodaei, Z.; Aliabadi, F.M. A Bayesian Approach for Sensor Optimisation in Impact Identification. Materials 2016, 9, 946. [Google Scholar] [CrossRef]
- Kendall, A.; Gal, Y. What uncertainties do we need in bayesian deep learning for computer vision? Adv. Neural Inf. Process.Syst. 2017, 30, 5574–5584. [Google Scholar]
- Sharif Khodaei, Z.; Ferri Aliabadi, M. Impact detection and identification with piezoceramic sensors: Passive sensing. In Structural Health Monitoring for Advanced Composite Structures; World Scientific: Singapore, 2018; pp. 215–265. [Google Scholar]
- Sarego, G.; Zaccariotto, M.; Galvanetto, U. Artificial neural networks for impact force reconstruction on composite plates and relevant uncertainty propagation. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 38–47. [Google Scholar] [CrossRef]
- Rizzo, P.; Cammarata, M.; Dutta, D.; Sohn, H.; Harries, K. An unsupervised learning algorithm for fatigue crack detection in waveguides. Smart Mater. Struct. 2009, 18, 025016. [Google Scholar] [CrossRef]
- Ramasso, E.; Placet, V.; Boubakar, M.L. Unsupervised consensus clustering of acoustic emission time-series for robust damage sequence estimation in composites. IEEE Trans. Instrum. Meas. 2015, 64, 3297–3307. [Google Scholar] [CrossRef]
- Rastin, Z.; Ghodrati Amiri, G.; Darvishan, E. Unsupervised structural damage detection technique based on a deep convolutional autoencoder. Shock. Vib. 2021, 2021, 6658575. [Google Scholar] [CrossRef]
- Li, R.; Gu, H.; Hu, B.; She, Z. Multi-feature fusion and damage identification of large generator stator insulation based on lamb wave detection and SVM method. Sensors 2019, 19, 3733. [Google Scholar] [CrossRef]
- Yue, N.; Sharif Khodaei, Z. Assessment of impact detection techniques for aeronautical application: ANN vs. LSSVM. J. Multiscale Model. 2016, 7, 1640005. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Li, L.; Zhou, H.; Liu, H.; Zhang, C.; Liu, J. A hybrid method coupling empirical mode decomposition and a long short-term memory network to predict missing measured signal data of SHM systems. Struct. Health Monit. 2021, 20, 1778–1793. [Google Scholar] [CrossRef]
- Jiang, S.-F.; Zhang, C.-M.; Koh, C. Structural damage detection by integrating data fusion and probabilistic neural network. Adv. Struct. Eng. 2006, 9, 445–458. [Google Scholar] [CrossRef]
- Zhou, X.; Ni, Y.; Zhang, F. Damage localization of cable-supported bridges using modal frequency data and probabilistic neural network. Math. Probl. Eng. 2014, 2014, 837963. [Google Scholar] [CrossRef]
- Huang, Q.; Gardoni, P.; Hurlebaus, S. A probabilistic damage detection approach using vibration-based nondestructive testing. Struct. Saf. 2012, 38, 11–21. [Google Scholar] [CrossRef]
- Buntine, W. Bayesian back-propagation. Complex Syst. 1991, 5, 603–643. [Google Scholar]
- MacKay, D.J. A practical Bayesian framework for backpropagation networks. Neural Comput. 1992, 4, 448–472. [Google Scholar] [CrossRef]
- Blundell, C.; Cornebise, J.; Kavukcuoglu, K.; Wierstra, D. Weight uncertainty in neural network. In Proceedings of the International Conference on Machine Learning, Lille, France, 7–9 July 2015; pp. 1613–1622. [Google Scholar]
- Kingma, D.P.; Salimans, T.; Welling, M. Variational dropout and the local reparameterization trick. Adv. Neural Inf. Process. Syst. 2015, 28. [Google Scholar]
- Seno, A.H.; Sharif Khodaei, Z.; Aliabadi, M.F. Passive sensing method for impact localisation in composite plates under simulated environmental and operational conditions. Mech. Syst. Signal Process. 2019, 129, 20–36. [Google Scholar] [CrossRef]
- Seno, A.H.; Aliabadi, M. Impact localisation in composite plates of different stiffness impactors under simulated environmental and operational conditions. Sensors 2019, 19, 3659. [Google Scholar] [CrossRef]
- Seno, A.H.; Aliabadi, M.F. A novel method for impact force estimation in composite plates under simulated environmental and operational conditions. Smart Mater. Struct. 2020, 29, 115029. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Material | Height/mm | Mass/g | Angle/° | Temperature/°C | Energy/mJ |
|---|---|---|---|---|---|---|
| A1 | Steel | 50 | 100 | 90 | 25 | 49 |
| A2 | Steel | 50 | 200 | 90 | 25 | 98 |
| A3 | Steel | 100 | 100 | 90 | 25 | 98 |
| A4 | Steel | 100 | 200 | 90 | 25 | 196 |
| B1 | Steel | 50 | 100 | 45 | 25 | 49 |
| B2 | Steel | 100 | 100 | 45 | 25 | 98 |
| Label | Energy/J(S1) … | Energy/J(S8) | Frequency/Hz(S1) … | Frequency/Hz(S8) | Time int/s(S1) … | Time int/s(S8) |
|---|---|---|---|---|---|---|
| 0 | 0.04968 | 0.04552 | 20 | 58 | 0.01287 | 0.00788 |
| 0 | 0.04943 | 0.04592 | 20 | 58 | 0.01293 | 0.00806 |
| 0 | 0.04958 | 0.04609 | 20 | 58 | 0.01302 | 0.00791 |
| 0 | 0.04911 | 0.04601 | 20 | 58 | 0.01298 | 0.00794 |
| 0 | 0.04062 | 0.04641 | 20 | 20 | 0.03223 | 0.01758 |
| … | … | … | … | … | … | … |
| 1 | 0.07705 | 0.03190 | 21 | 21 | 0.02126 | 0.01660 |
| … | … | … | … | … | … | … |
| 2 | 0.10343 | 0.05218 | 21 | 20 | 0.02105 | 0.01538 |
| Meta Model | Input Feature * | Training Set | Testing Set | Reliable Classification | Unreliable Classification | False Classification |
|---|---|---|---|---|---|---|
| BNN | 1 | A | A | 94% | 6% | 0% |
| BNN | 1 | A | A+B | 70% (only 55% for B) | 8% | 22% |
| BNN | 1+2 | A | A+B | 70% | 8% | 22% |
| BNN | 1+3 | A | A+B | 54% | 39% | 7% |
| Multi-ANN | 1 | A | A | 98% | 0% | 2% |
| Multi-ANN | 1 | A | A+B | 70% (only 44% for B) | 2% | 28% |
| Multi-ANN | 1+2 | A | A+B | 70% | 3% | 27% |
| Multi-ANN | 1+3 | A | A+B | 70% | 18% | 12% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Seno, A.H.; Sharif Khodaei, Z.; Aliabadi, M.H.F. Structural Health Monitoring Impact Classification Method Based on Bayesian Neural Network. Polymers 2022, 14, 3947. https://doi.org/10.3390/polym14193947
Yu H, Seno AH, Sharif Khodaei Z, Aliabadi MHF. Structural Health Monitoring Impact Classification Method Based on Bayesian Neural Network. Polymers. 2022; 14(19):3947. https://doi.org/10.3390/polym14193947
Chicago/Turabian StyleYu, Haofan, Aldyandra Hami Seno, Zahra Sharif Khodaei, and M. H. Ferri Aliabadi. 2022. "Structural Health Monitoring Impact Classification Method Based on Bayesian Neural Network" Polymers 14, no. 19: 3947. https://doi.org/10.3390/polym14193947
APA StyleYu, H., Seno, A. H., Sharif Khodaei, Z., & Aliabadi, M. H. F. (2022). Structural Health Monitoring Impact Classification Method Based on Bayesian Neural Network. Polymers, 14(19), 3947. https://doi.org/10.3390/polym14193947