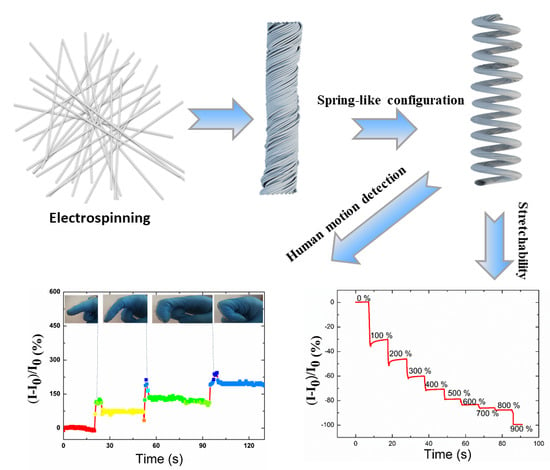
Facile Preparation of Highly Stretchable TPU/Ag Nanowire Strain Sensor with Spring-Like Configuration

 and
and 
Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Experimental Section
2.1. Materials
2.2. Electrospinning of TPU Nanofibrous Membrane (Schematic A)
2.3. Fabricating of TPU/AgNWs Nanomembrane (Schematic B)
2.4. The Sensor with Spring-Like Configuration (Schematic B–C)
2.5. Electrode Fabrication (Schematic D)
2.6. Properties of Strain Sensor Measurements
3. Results and Discussion
3.1. The EDS Spectrum of the Strain Sensor with Spring-Like Configuration
3.2. The XRD Map of the Strain Sensor with Spring-Like Configuration
3.3. The SEM Image of the Strain Sensor with Spring-Like Configuration
3.4. Stretchability Test
3.5. Stability Test
3.6. Sensitivity of the Bending Test
3.7. Sensitivity of Pulse Pressure Monitoring
3.8. Sensitivity of Finger Motion Monitoring
3.9. Sensitivity to Knee Motion
3.10. Pressure-Resolved Response
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fei, H.; Su, X.; Huang, M.; Li, J.; Yuan, Z.; Zhao, S.; Feng, L.; Bo, Z.; Ying, W.; Zhang, G. Fabrication of a flexible and stretchable three-dimensional conductor based on Au–Ni@graphene coated polyurethane sponge by electroless plating. J. Mater. Chem. C 2018, 6, 8135–8143. [Google Scholar]
- Zhang, S.; Liu, H.; Yang, S.; Shi, X.; Zhang, D.; Shan, C.; Mi, L.; Liu, C.; Shen, C.; Gou, Z. Ultrasensitive and highly compressible piezoresistive sensor based on polyurethane sponge coated with a cracked cellulose nanofibril/silver nanowire layer. ACS Appl. Mater. Interfaces 2019, 11, 10922–10932. [Google Scholar] [CrossRef]
- Kwon, J.; Suh, Y.D.; Lee, J.; Lee, P.; Han, S.; Hong, S.; Yeo, J.; Lee, H.; Ko, S.H. Recent progress in silver nanowire based flexible/wearable optoelectronics. J. Mater. Chem. C 2018, 6, 7445–7461. [Google Scholar] [CrossRef]
- Liu, Y.; Pharr, M.; Salvatore, G.A. Lab-on-Skin: A Review of Flexible and Stretchable Electronics for Wearable Health Monitoring. ACS Nano 2017, 11, 9614. [Google Scholar] [CrossRef] [PubMed]
- Ge, G.; Zhang, Y.; Shao, J.; Wang, W.; Si, W.; Huang, W.; Dong, X. Stretchable, Transparent, and Self-atterned Hydrogelased Pressure Sensor for Human Motions Detection. Adv. Funct. Mater. 2018, 28, 1802576. [Google Scholar] [CrossRef]
- Choi, S.; Han, S.I.; Kim, D.; Hyeon, T.; Kim, D.H. High-performance stretchable conductive nanocomposites: Materials, processes, and device applications. Chem. Soc. Rev. 2018, 48, 1566–1595. [Google Scholar] [CrossRef]
- Liu, W.; Song, M.S.; Kong, B.; Cui, Y. Flexible and Stretchable Energy Storage: Recent Advances and Future Perspectives. Adv. Mater. 2017, 29, 1603436. [Google Scholar] [CrossRef]
- Lu, Y.; Liu, Z.; Yan, H.; Peng, Q.; Wang, R.; Barkey, M.E.; Wujcik, E.K. Ultra-Stretchable Conductive Polymer Complex as Strain Sensor with Repeatable Autonomous Self-Healing Ability. ACS Appl. Mater. Interfaces 2019, 11, 20453–20464. [Google Scholar] [CrossRef]
- Liu, C.; Han, S.; Xu, H.; Wu, J.; Liu, C. Multifunctional Highly Sensitive Multiscale Stretchable Strain Sensor Based on a Graphene/Glycerol–KCl Synergistic Conductive Network. ACS Appl. Mater. Interfaces 2018, 10, 31716–31724. [Google Scholar] [CrossRef]
- Yan, C.; Wang, J.; Kang, W.; Cui, M.; Wang, X.; Foo, C.Y.; Chee, K.J.; Lee, P.S. Highly stretchable piezoresistive graphene–nanocellulose nanopaper for strain sensors. Adv. Mater. 2014, 26, 2022–2027. [Google Scholar] [CrossRef]
- Trung, T.Q.; Lee, N.E.; Lee, E.N. Recent Progress on Stretchable Electronic Devices with Intrinsically Stretchable Components. Adv. Mater. 2017, 29, 1603167. [Google Scholar] [CrossRef] [PubMed]
- Fan, H.; Li, K.; Li, Q.; Hou, C.; Zhang, Q.; Li, Y.; Jin, W.; Wang, H. Prepolymerization-assisted fabrication of an ultrathin immobilized layer to realize a semi-embedded wrinkled AgNW network for a smart electrothermal chromatic display and actuator. J. Mater. Chem. C 2017, 5, 9778–9785. [Google Scholar] [CrossRef]
- Yao, S.; Zhu, Y. Wearable multifunctional sensors using printed stretchable conductors made of silver nanowires. Nanoscale 2014, 6, 2345–2352. [Google Scholar] [CrossRef] [PubMed]
- Yan, C.; Wang, J.; Kang, W.; Cui, M.; Wang, X.; Foo, C.Y.; Chee, K.J.; Lee, P.S. Graphene: Highly stretchable piezoresistive graphene-nanocellulose nanopaper for strain sensors (Adv. Mater. 13/2014). Adv. Mater. 2014, 26, 1950. [Google Scholar] [CrossRef]
- Liu, Z.F.; Fang, S.; Moura, F.A.; Ding, J.N.; Jiang, N.; Di, J.; Zhang, M.; Lepró, X.; Galvão, D.S.; Haines, C.S. STRETCHY ELECTRONICS. Hierarchically buckled sheath-core fibers for superelastic electronics, sensors, and muscles. Science 2015, 349, 400–404. [Google Scholar] [CrossRef] [PubMed]
- Son, W.; Chun, S.; Lee, J.M.; Park, J.; Suh, D.; Jeong, S.M. Highly twisted supercoils for superelastic multi-functional fibres. Nat. Commun. 2019, 10, 1–11. [Google Scholar] [CrossRef]
- Yu, G.F.; Yan, X.; Yu, M.; Jia, M.Y.; Pan, W.; He, X.X.; Han, W.P.; Zhang, Z.M.; Yu, L.M.; Long, Y.Z. Patterned, highly stretchable and conductive nanofibrous PANI/PVDF strain sensors based on electrospinning and in situ polymerization. Nanoscale 2016, 8, 2944–2950. [Google Scholar] [CrossRef]
- Kim, K.; Hong, S.; Cho, H.; Ko, S.H. Highly sensitive and stretchable multi-dimensional strain sensor with anisotropic metal nanowire percolation networks. Nano Lett. 2015, 15, 5240–5247. [Google Scholar] [CrossRef]
- Gao, N.; Zhang, X.; Liao, S.; Jia, H.; Wang, Y. Polymer Swelling Induced Conductive Wrinkles for an Ultrasensitive Pressure Sensor. ACS Macro Lett. 2016, 5, 823–827. [Google Scholar] [CrossRef]
- Ge, J.; Sun, L.; Zhang, F.R.; Zhang, Y.; Shi, L.A.; Zhao, H.Y.; Zhu, H.W.; Jiang, H.L.; Yu, S.H. Stretchable Electronics: A Stretchable Electronic Fabric Artificial Skin with Pressure-, Lateral Strain-, and Flexion-Sensitive Properties (Adv. Mater. 4/2016). Adv. Mater. 2016, 28, 722–728. [Google Scholar] [CrossRef]
- Yang, Y.; Liu, N.; Liu, W.; Li, M.; Ma, Y.; Cheng, L.; Wang, S.; Rao, J.; Hu, X.; Su, J. 3D hybrid porous Mxene-sponge network and its application in piezoresistive sensor. Nano Energy 2018, 50, 79–87. [Google Scholar]
- Han, S.; Hong, S.; Ham, J.; Yeo, J.; Lee, J.; Kang, B.; Lee, P.; Kwon, J.; Lee, S.S.; Yang, M.Y. Flexible Electronics: Fast Plasmonic Laser Nanowelding for a Cu-Nanowire Percolation Network for Flexible Transparent Conductors and Stretchable Electronics (Adv. Mater. 33/2014). Adv. Mater. 2014, 26, 5808–5814. [Google Scholar] [CrossRef]
- Lee, H.B.; Bae, C.W.; Duy, L.T.; Sohn, I.Y.; Kim, D.I.; Song, Y.J.; Kim, Y.J.; Lee, N.E. Mogul-Patterned Elastomeric Substrate for Stretchable Electronics. Adv. Mater. 2016, 28, 3069–3077. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Chen, J.; Li, Y.; Shi, G. High-Performance Strain Sensors with Fish-Scale-Like Graphene-Sensing Layers for Full-Range Detection of Human Motions. ACS Nano 2016, 10, 7901–7906. [Google Scholar] [CrossRef] [PubMed]
- Amjadi, M.; Kyung, K.U.; Park, I.; Sitti, M. Stretchable, Skin-Mountable, and Wearable Strain Sensors and Their Potential Applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- You, B.; Kim, Y.; Ju, B.K.; Kim, J.W. Highly stretchable and waterproof electroluminescence device based on superstable stretchable transparent electrode. ACS Appl. Mater. Interfaces 2017, 9, 5486. [Google Scholar] [CrossRef]
- Roda, N.; Naoji, M.; Zhi, J.; Goni, N.M.O.; Tomoyuki, Y.; Takao, S. A Highly Sensitive Capacitive-type Strain Sensor using Wrinkled Ultra-thin Gold Films. Nano Lett. 2018, 18, 5610–5617. [Google Scholar]
- Tao, W.; Ying, Z.; Liu, Q.; Wen, C.; Xu, H. A Self-Healable, Highly Stretchable, and Solution Processable Conductive Polymer Composite for Ultrasensitive Strain and Pressure Sensing. Adv. Funct. Mater. 2017, 28, 1705551. [Google Scholar]
- Lee, S.; Shin, S.; Lee, S.; Seo, J.; Lee, J.; Son, S.; Cho, H.J.; Algadi, H.; Al-Sayari, S.; Kim, D.E. Ag Nanowire Reinforced Highly Stretchable Conductive Fibers for Wearable Electronics. Adv. Funct. Mater. 2015, 25, 3114–3121. [Google Scholar] [CrossRef]
- Cao, M.; Wang, M.; Li, L.; Qiu, H.; Padhiar, M.A.; Yang, Z. Wearable rGO-Ag NW@ cotton fiber piezoresistive sensor based on the fast charge transport channel provided by Ag nanowire. Nano Energy 2018, 50, 528–535. [Google Scholar] [CrossRef]
- Wang, T.; Luo, C.; Liu, F.; Li, L.; Zhang, X.; Li, Y.; Han, E.H.; Fu, Y.; Jiao, Y. Highly Transparent, Conductive and Bendable Ag Nanowire Electrode with Enhanced Mechanical Stability based on Polyelectrolyte Adhesive Layer. Langmuir 2017, 33, 4702–4708. [Google Scholar] [CrossRef] [PubMed]
- Xiong, W.; Liu, H.; Chen, Y.; Zheng, M.; Zhao, Y.; Kong, X.; Wang, Y.; Zhang, X.; Kong, X.; Wang, P. Highly Conductive, Air-Stable Silver Nanowire@Iongel Composite Films toward Flexible Transparent Electrodes. Adv. Mater. 2016, 28, 7167–7172. [Google Scholar] [CrossRef] [PubMed]
- Gong, S.; Schwalb, W.; Wang, Y.; Chen, Y.; Tang, Y.; Si, J.; Shirinzadeh, B.; Cheng, W. A wearable and highly sensitive pressure sensor with ultrathin gold nanowires. Nat. Commun. 2014, 5, 3132. [Google Scholar] [CrossRef] [PubMed]
- Lin, D.-P.; He, H.-W.; Huang, Y.-Y.; Han, W.-P.; Yu, G.-F.; Yan, X.; Long, Y.-Z.; Xia, L.-H. Twisted microropes for stretchable devices based on electrospun conducting polymer fibers doped with ionic liquid. J. Mater. Chem. C 2014, 2, 8962–8966. [Google Scholar] [CrossRef]
- Mi, H.Y.; Li, Z.; Turng, L.S.; Sun, Y.; Gong, S. Silver nanowire/thermoplastic polyurethane elastomer nanocomposites: Thermal, mechanical, and dielectric properties. Mater. Des. 2014, 56, 398–404. [Google Scholar] [CrossRef]
- Lu, L.; Wei, X.; Zhang, Y.; Zheng, G.; Dai, K.; Liu, C.; Shen, C. A flexible and self-formed sandwich structure strain sensor based on AgNW decorated electrospun fibrous mats with excellent sensing capability and good oxidation inhibition property. J. Mater. Chem. C 2017, 5, 7035–7042. [Google Scholar] [CrossRef]
- Lu, Y.; Jiang, J.; Yoon, S.; Kim, K.S.; Kim, J.H.; Park, S.; Kim, S.H.; Piao, L. High-Performance Stretchable Conductive Composite Fibers from Surface Modified Silver Nanowires and Thermoplastic Polyurethane by Wet Spinning. ACS Appl. Mater. Interfaces 2017, 10, 2093–2104. [Google Scholar] [CrossRef]
- Yong, W.; Song, C.; Xue, Y.; Wang, P.; Lan, L. Multiscale Wrinkled Microstructures for Piezoresistive Fibers. Adv. Funct. Mater. 2016, 26, 5078–5085. [Google Scholar]
- Byeong-Ung, H.; Ju-Hyuck, L.; Tran Quang, T.; Eun, R.; Do-Il, K.; Sang-Woo, K.; Nae-Eung, L. Transparent Stretchable Self-Powered Patchable Sensor Platform with Ultrasensitive Recognition of Human Activities. ACS Nano 2015, 9, 8801–8810. [Google Scholar]
- Tong, L.; Wang, X.X.; He, X.X.; Nie, G.D.; Zhang, J.; Zhang, B.; Guo, W.Z.; Long, Y.Z. Electrically Conductive TPU Nanofibrous Composite with High Stretchability for Flexible Strain Sensor. Nanoscale Res. Lett. 2018, 13, 86. [Google Scholar] [CrossRef]
- Wu, N.; Cao, Q.; Wang, X.; Li, S.; Li, X.; Deng, H. In situ ceramic fillers of electrospun thermoplastic polyurethane/poly(vinylidene fluoride) based gel polymer electrolytes for Li-ion batteries. J. Power Sources 2011, 196, 9751–9756. [Google Scholar] [CrossRef]
- Seongwoo, R.; Phillip, L.; Chou, J.B.; Ruize, X.; Rong, Z.; Anastasios John, H.; Sang-Gook, K. Extremely Elastic Wearable Carbon Nanotube Fiber Strain Sensor for Monitoring of Human Motion. ACS Nano 2015, 9, 5929. [Google Scholar]
- Yang, Z.; Pang, Y.; Han, X.L.; Yang, Y.; Ling, J.; Jian, M.; Zhang, Y.; Yang, Y.; Ren, T.L. GrapheneTextile Strain Sensor with Negative ResistanceVariation for Human Motion Detection. ACS Nano 2018, 12, 9134–9141. [Google Scholar] [CrossRef] [PubMed]
- Zhuo, H.; Hu, Y.; Tong, X.; Chen, Z.; Zhong, L.; Lai, H.; Liu, L.; Jing, S.; Liu, Q.; Liu, C. A Supercompressible, Elastic, and Bendable Carbon Aerogel with Ultrasensitive Detection Limits for Compression Strain, Pressure, and Bending Angle. Adv. Mater. 2018, 30, 1706705. [Google Scholar] [CrossRef]
- Pang, Y.; Zhang, K.; Yang, Z.; Jiang, S.; Ju, Z.; Li, Y.; Wang, X.; Wang, D.; Jian, M.; Zhang, Y. Epidermis microstructure inspired graphene pressure sensor with random distributed spinosum for high sensitivity and large linearity. ACS Nano 2018, 12, 2346–2354. [Google Scholar] [CrossRef]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, W.; Wang, J.; Li, Y.-P.; Sun, X.-B.; Wang, J.-P.; Wang, X.-X.; Zhang, J.; You, H.-D.; Yu, G.-F.; Long, Y.-Z. Facile Preparation of Highly Stretchable TPU/Ag Nanowire Strain Sensor with Spring-Like Configuration. Polymers 2020, 12, 339. https://doi.org/10.3390/polym12020339
Pan W, Wang J, Li Y-P, Sun X-B, Wang J-P, Wang X-X, Zhang J, You H-D, Yu G-F, Long Y-Z. Facile Preparation of Highly Stretchable TPU/Ag Nanowire Strain Sensor with Spring-Like Configuration. Polymers. 2020; 12(2):339. https://doi.org/10.3390/polym12020339
Chicago/Turabian StylePan, Wei, Juan Wang, Yong-Ping Li, Xiao-Bo Sun, Jin-Ping Wang, Xiao-Xiong Wang, Jun Zhang, Hai-Dong You, Gui-Feng Yu, and Yun-Ze Long. 2020. "Facile Preparation of Highly Stretchable TPU/Ag Nanowire Strain Sensor with Spring-Like Configuration" Polymers 12, no. 2: 339. https://doi.org/10.3390/polym12020339
APA StylePan, W., Wang, J., Li, Y.-P., Sun, X.-B., Wang, J.-P., Wang, X.-X., Zhang, J., You, H.-D., Yu, G.-F., & Long, Y.-Z. (2020). Facile Preparation of Highly Stretchable TPU/Ag Nanowire Strain Sensor with Spring-Like Configuration. Polymers, 12(2), 339. https://doi.org/10.3390/polym12020339