Effect of Prestrain on the Actuation Characteristics of Dielectric Elastomers

 ,
,  and
and
Abstract
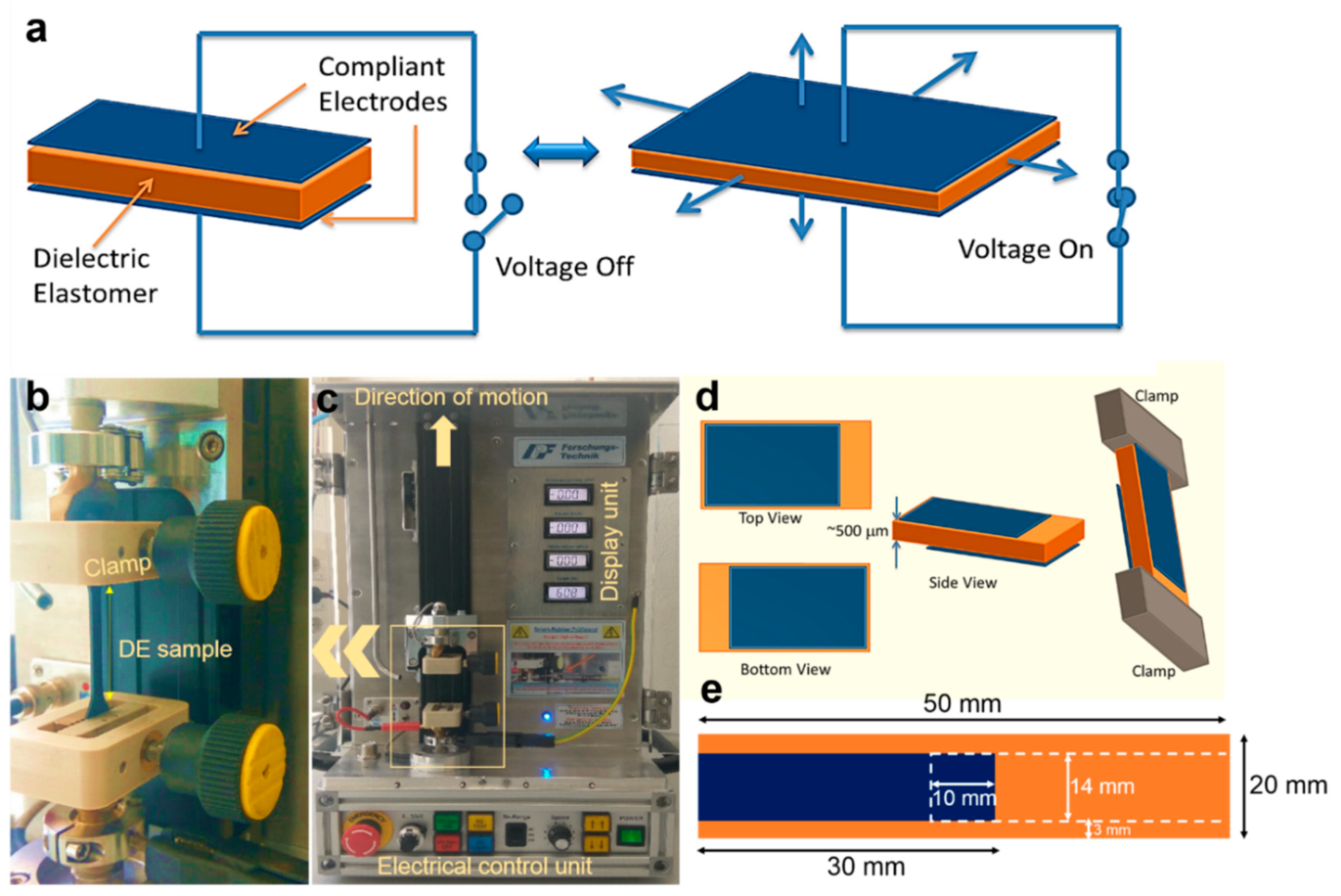
1. Introduction
2. Materials and Methods
2.1. Material Used
2.2. Fabrication of the Specimen
3. Results and Discussion
3.1. Actuation Behavior of Different Acrylonitrile Butadiene Rubber (NBR) Grades
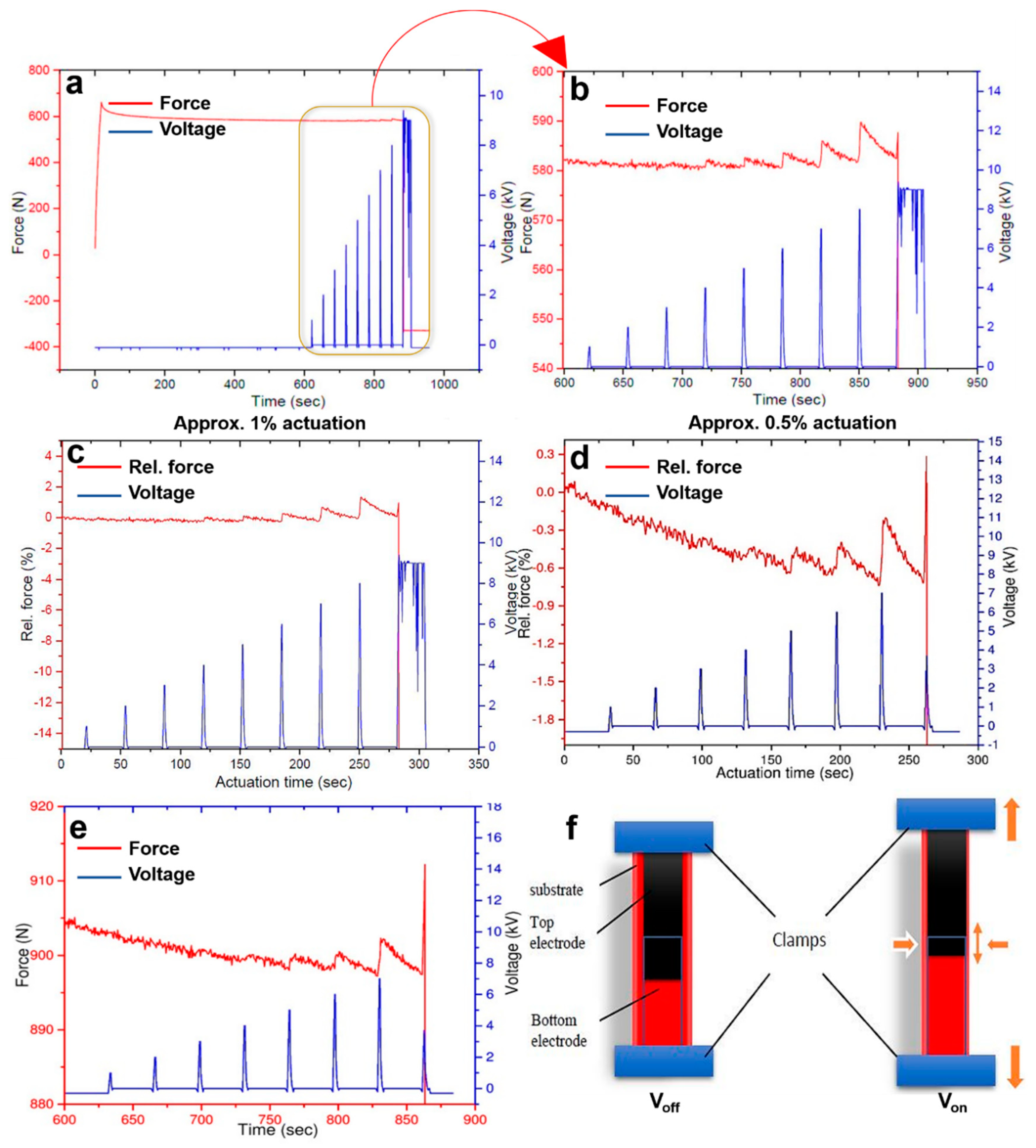
3.1.1. At 30% Prestrain
3.1.2. At 50% Prestrain
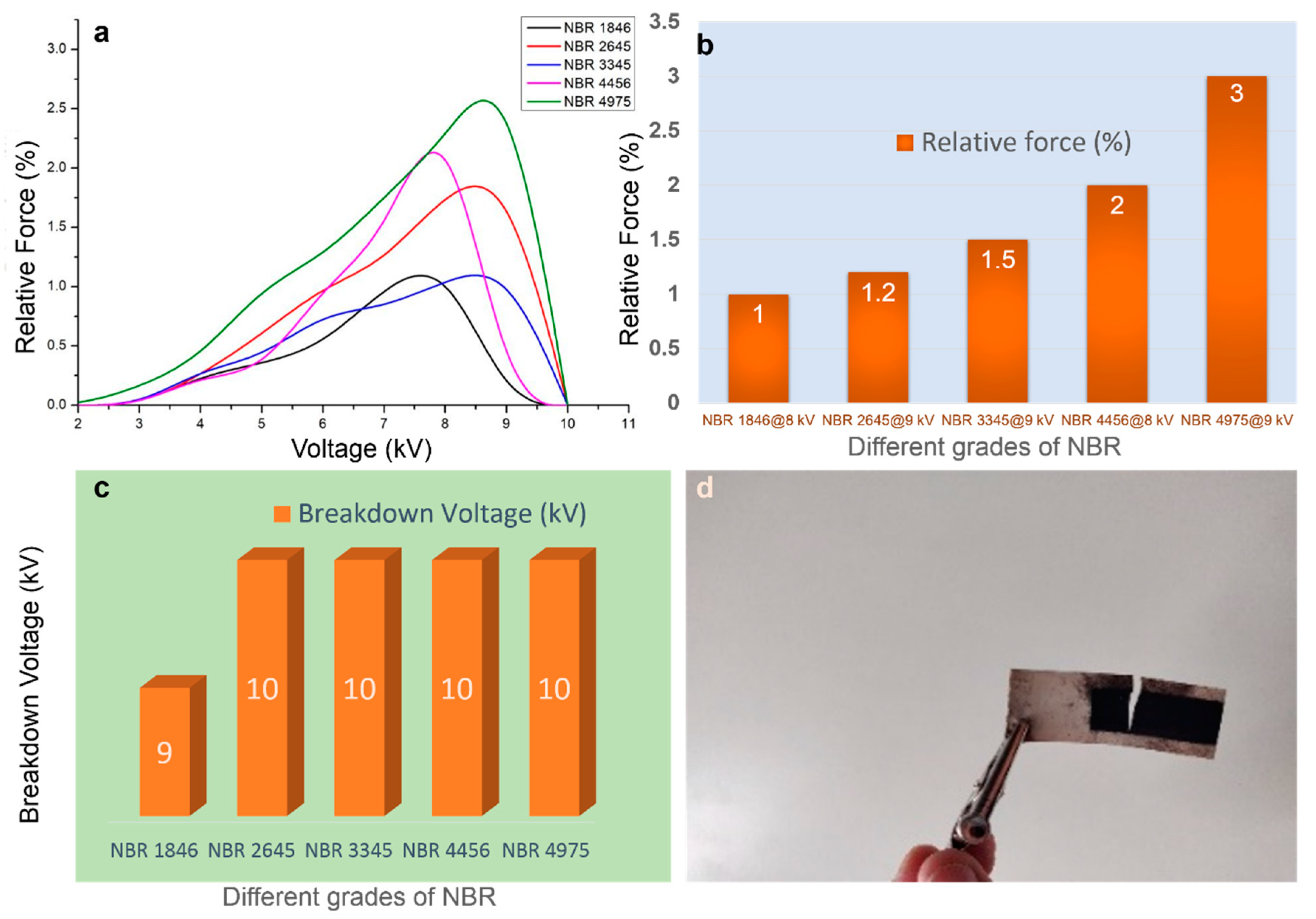
3.1.3. Comparison of Actuation Characteristics with Increasing Acrylonitrile (ACN) Content
3.1.4. Breakdown Voltage of NBR Grades
3.2. Actuation Behavior of Hydrogenated-Acrylonitrile Butadiene Rubber (HNBR)
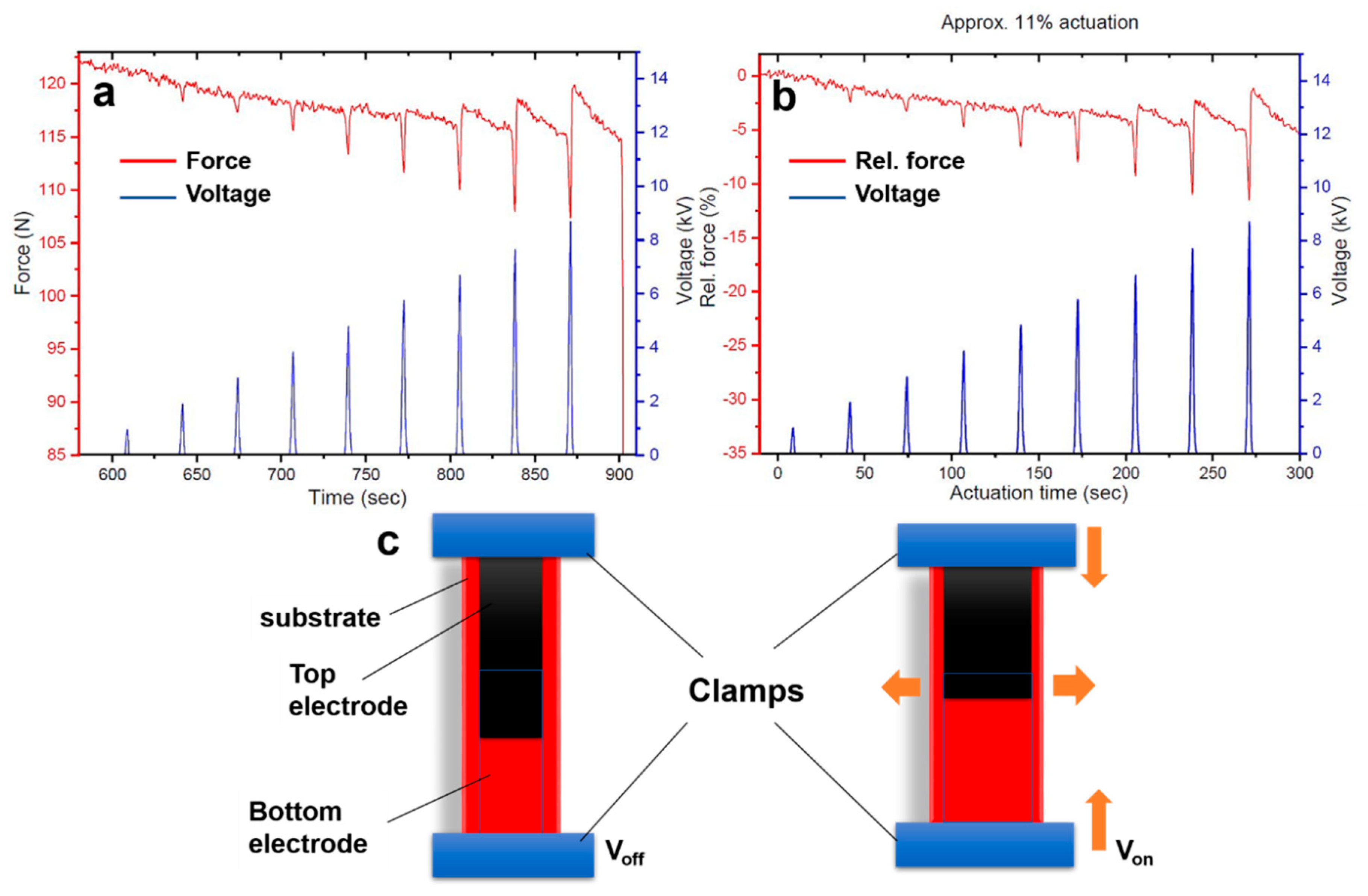
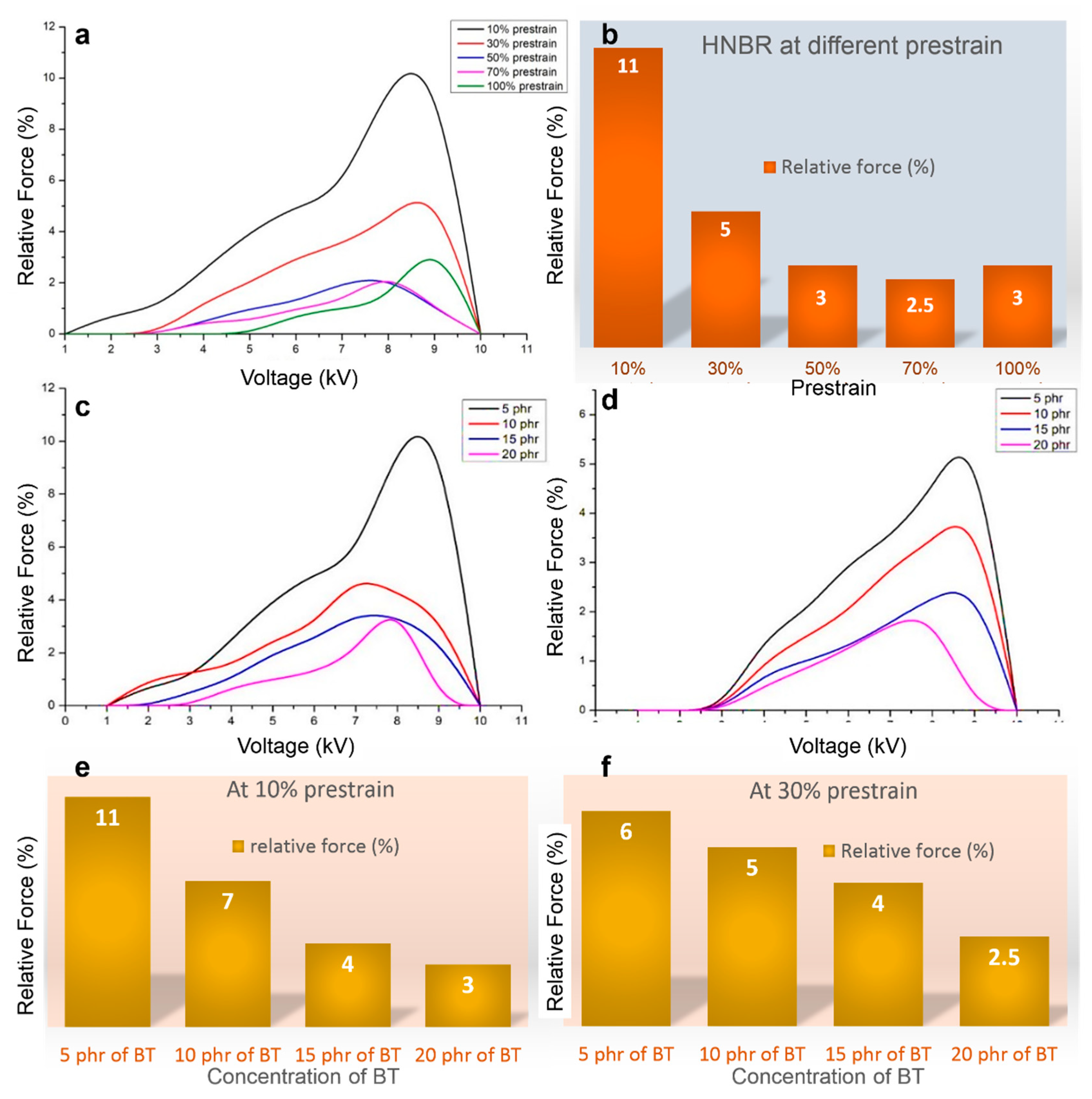
3.2.1. Effect of Prestrain on Actuation
3.2.2. Comparison of HNBR Actuation at Different Prestrains
3.2.3. Comparison of HNBR Actuation with Varying Barium Titanate (BT) Contents at Different Prestrains
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Keplinger, C.; Kaltenbrunner, M.; Arnold, N.; Bauer, S. Rontgen’s electrode-free elastomer actuators without electromechanical pull-in instability. Proc. Natl. Acad. Sci. USA 2010, 107, 4505–4510. [Google Scholar] [CrossRef] [PubMed]
- Bozlar, M.; Punckt, C.; Korkut, S.; Zhu, J.; Foo, C.C.; Suo, Z.; Aksay, I.A. Dielectric elastomer actuators with elastomeric electrodes. Appl. Phys. Lett. 2012, 101, 091907. [Google Scholar] [CrossRef]
- Gupta, U.; Qin, L.; Wang, Y.; Godaba, H.; Zhu, J. Soft robots based on dielectric elastomer actuators: A review. Smart Mater. Struct. 2019, 28, 103002. [Google Scholar] [CrossRef]
- Brochu, P.; Pei, Q. Advances in Dielectric Elastomers for Actuators and Artificial Muscles. Macromol. Rapid Commun. 2010, 31, 10–36. [Google Scholar] [CrossRef] [PubMed]
- Youn, J.-H.; Jeong, S.M.; Hwang, G.; Kim, H.; Hyeon, K.; Park, J.; Kyung, K.-U. Dielectric Elastomer Actuator for Soft Robotics Applications and Challenges. Appl. Sci. 2020, 10, 640. [Google Scholar] [CrossRef]
- Pelrine, R. High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science 2000, 287, 836–839. [Google Scholar] [CrossRef] [PubMed]
- Bele, A.; Tugui, C.; Asandulesa, M.; Ionita, D.; Vasiliu, L.; Stiubianu, G.T.; Iacob, M.; Racles, C.; Cazacu, M. Conductive stretchable composites properly engineered to develop highly compliant electrodes for dielectric elastomer actuators. Smart Mater. Struct. 2018, 27, 105005. [Google Scholar] [CrossRef]
- Duduta, M.; Hajiesmaili, E.; Zhao, H.; Wood, R.J.; Clarke, D.R. Realizing the potential of dielectric elastomer artificial muscles. Proc. Natl. Acad. Sci. USA 2019, 116, 2476–2481. [Google Scholar] [CrossRef]
- Chakraborti, P.; Toprakci, H.K.; Yang, P.; Di Spigna, N.; Franzon, P.D.; Ghosh, T.K. A compact dielectric elastomer tubular actuator for refreshable Braille displays. Sens. Actuators A Phys. 2012, 179, 151–157. [Google Scholar] [CrossRef]
- Phung, H.; Nguyen, C.T.; Jung, H.S.; Nguyen, T.D.; Choi, H.R. Bidirectional tactile display driven by electrostatic dielectric elastomer actuator. Smart Mater. Struct. 2020, 29, 035007. [Google Scholar] [CrossRef]
- Carpi, F.; Bauer, S.; De Rossi, D. Stretching Dielectric Elastomer Performance. Science 2010, 330, 1759–1761. [Google Scholar] [CrossRef] [PubMed]
- Pelrine, R.E.; Kornbluh, R.D.; Joseph, J.P. Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation. Sens. Actuators A Phys. 1998, 64, 77–85. [Google Scholar] [CrossRef]
- Ma, W.; Cross, L. An experimental investigation of electromechanical response in a dielectric acrylic elastomer. Appl. Phys. A 2004, 78, 1201–1204. [Google Scholar] [CrossRef]
- Cao, X.; Zhang, M.; Zhang, Z.; Xu, Y.; Xiao, Y.; Li, T. Review of Soft Linear Actuator and the Design of a Dielectric Elastomer Linear Actuator. Acta Mech. Solida Sin. 2019, 32, 566–579. [Google Scholar] [CrossRef]
- Nguyen, T.D.; Nguyen, C.T.; Lee, D.-H.; Kim, U.; Lee, C.; Nam, J.-D.; Choi, H.R. Highly stretchable dielectric elastomer material based on acrylonitrile butadiene rubber. Macromol. Res. 2014, 22, 1170–1177. [Google Scholar] [CrossRef]
- Anderson, I.A.; Gisby, T.A.; McKay, T.G.; O’Brien, B.; Calius, E.P. Multi-functional dielectric elastomer artificial muscles for soft and smart machines. J. Appl. Phys. 2012, 112, 041101. [Google Scholar] [CrossRef]
- Cârlescu, V.; Prisăcaru, G.; Olaru, D. Electromechanical response of silicone dielectric elastomers. IOP Conf. Ser. Mater. Sci. Eng. 2016, 147, 012057. [Google Scholar] [CrossRef]
- Shian, S.; Bertoldi, J.T.O.T.A.D.J.S.A.B.K.; Clarke, D.R. Use of aligned fibers to enhance the performance of dielectric elastomer inchworm robots. In Electroactive Polymer Actuators and Devices (EAPAD); International Society for Optics and Photonics: San Diego, CA, USA, 2015; Volume 9430, 94301P. [Google Scholar] [CrossRef]
- Bhagavatheswaran, E.S.; Parsekar, M.; Das, A.; Le, H.H.; Wießner, S.; Stöckelhuber, K.W.; Schmaucks, G.; Heinrich, G. Construction of an Interconnected Nanostructured Carbon Black Network: Development of Highly Stretchable and Robust Elastomeric Conductors. J. Phys. Chem. C 2015, 119, 21723–21731. [Google Scholar] [CrossRef]
- Subramaniam, K.; Das, A.; Simon, F.; Heinrich, G. Networking of ionic liquid modified CNTs in SSBR. Eur. Polym. J. 2013, 49, 345–352. [Google Scholar] [CrossRef]
- Choi, H.R.; Jung, K.; Chuc, N.H.; Jung, M.; Koo, I.; Koo, J.; Lee, J.; Lee, J.; Nam, J.; Cho, M.; et al. Effects of prestrain on behavior of dielectric elastomer actuator. In Smart Structures and Materials 2005: Electroactive Polymer Actuators and Devices (EAPAD); International Society for Optics and Photonics: San Diego, CA, USA, 2005; pp. 283–291. [Google Scholar]
- Bar-Cohen, Y. Electroactive Polymers as Artificial Muscles—Capabilities, Potentials and Challanges. In Handbook on Biomimetics; Osada, Y., Ed.; NTS Inc.: Tokyo, Japan, 2000. [Google Scholar]
- Bokobza, L. Mechanical and Electrical Properties of Elastomer Nanocomposites Based on Different Carbon Nanomaterials. C 2017, 3, 10. [Google Scholar] [CrossRef]
- Fasolt, B.S.; Welsch, F.; Jank, M.; Seelecke, S. Effect of actuation parameters and environment on the breakdown voltage of silicone dielectric elastomer films. Smart Mater. Struct. 2019, 28, 094002. [Google Scholar] [CrossRef]
- Yang, D.; Zhang, L.; Ning, N.; Li, N.; Wang, Z.; Nishi, T.; Ito, K.; Tian, M. Large increase in actuated strain of HNBR dielectric elastomer by controlling molecular interaction and dielectric filler network. RSC Adv. 2013, 3, 21896. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ingredients 1 | M1 | M2 | M3 | M4 | M5 | M6 | M7 | M8 | M9 |
|---|---|---|---|---|---|---|---|---|---|
| NBR 1846 F | 100 | - | - | - | - | - | - | - | - |
| NBR 2645 F | - | 100 | - | - | - | - | - | - | - |
| NBR 3345 F | - | - | 100 | - | - | - | - | - | - |
| NBR 4456 F | - | - | - | 100 | - | - | - | - | - |
| NBR 4975 F | - | - | - | - | 100 | ||||
| HNBR | - | - | - | - | - | 100 | 100 | 100 | 100 |
| ZnO | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 | 5 |
| Stearic acid | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 |
| Barium titanate | 5 | 5 | 5 | 5 | 5 | 5 | 10 | 15 | 20 |
| Dioctyl phthalate | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
| CBS | 1.5 | 1.5 | 1.5 | 1.5 | 1.5 | - | - | - | - |
| TMTD | 1 | 1 | 1 | 1 | 1 | - | - | - | - |
| Sulfur | 2 | 2 | 2 | 2 | 2 | - | - | - | - |
| BIBP 40 | - | - | - | - | - | 2 | 2 | 2 | 2 |
| TAC | - | - | - | - | - | 1 | 1 | 1 | 1 |
| Ingredients 1 | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| HNBR C 3446 | 100 | 100 | 100 | 100 |
| ZnO | 5 | 5 | 5 | 5 |
| Stearic acid | 2 | 2 | 2 | 2 |
| Barium titanate | 5 | 10 | 15 | 20 |
| DOP | 10 | 10 | 10 | 10 |
| BIPB 40 | 2 | 2 | 2 | 2 |
| TAC | 1 | 1 | 1 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, M.; Sharma, A.; Hait, S.; Wießner, S.; Heinrich, G.; Arief, I.; Naskar, K.; Stöckelhuber, K.W.; Das, A. Effect of Prestrain on the Actuation Characteristics of Dielectric Elastomers. Polymers 2020, 12, 2694. https://doi.org/10.3390/polym12112694
Kumar M, Sharma A, Hait S, Wießner S, Heinrich G, Arief I, Naskar K, Stöckelhuber KW, Das A. Effect of Prestrain on the Actuation Characteristics of Dielectric Elastomers. Polymers. 2020; 12(11):2694. https://doi.org/10.3390/polym12112694
Chicago/Turabian StyleKumar, Mayank, Anutsek Sharma, Sakrit Hait, Sven Wießner, Gert Heinrich, Injamamul Arief, Kinsuk Naskar, Klaus Werner Stöckelhuber, and Amit Das. 2020. "Effect of Prestrain on the Actuation Characteristics of Dielectric Elastomers" Polymers 12, no. 11: 2694. https://doi.org/10.3390/polym12112694
APA StyleKumar, M., Sharma, A., Hait, S., Wießner, S., Heinrich, G., Arief, I., Naskar, K., Stöckelhuber, K. W., & Das, A. (2020). Effect of Prestrain on the Actuation Characteristics of Dielectric Elastomers. Polymers, 12(11), 2694. https://doi.org/10.3390/polym12112694