Effect of Material Composition on Tunable Surface Roughness of Magnetoactive Elastomers

 ,
,  and
and
Abstract
:
1. Introduction
2. Materials and Methods
2.1. MAE Specimens
2.2. Optical Microscopy
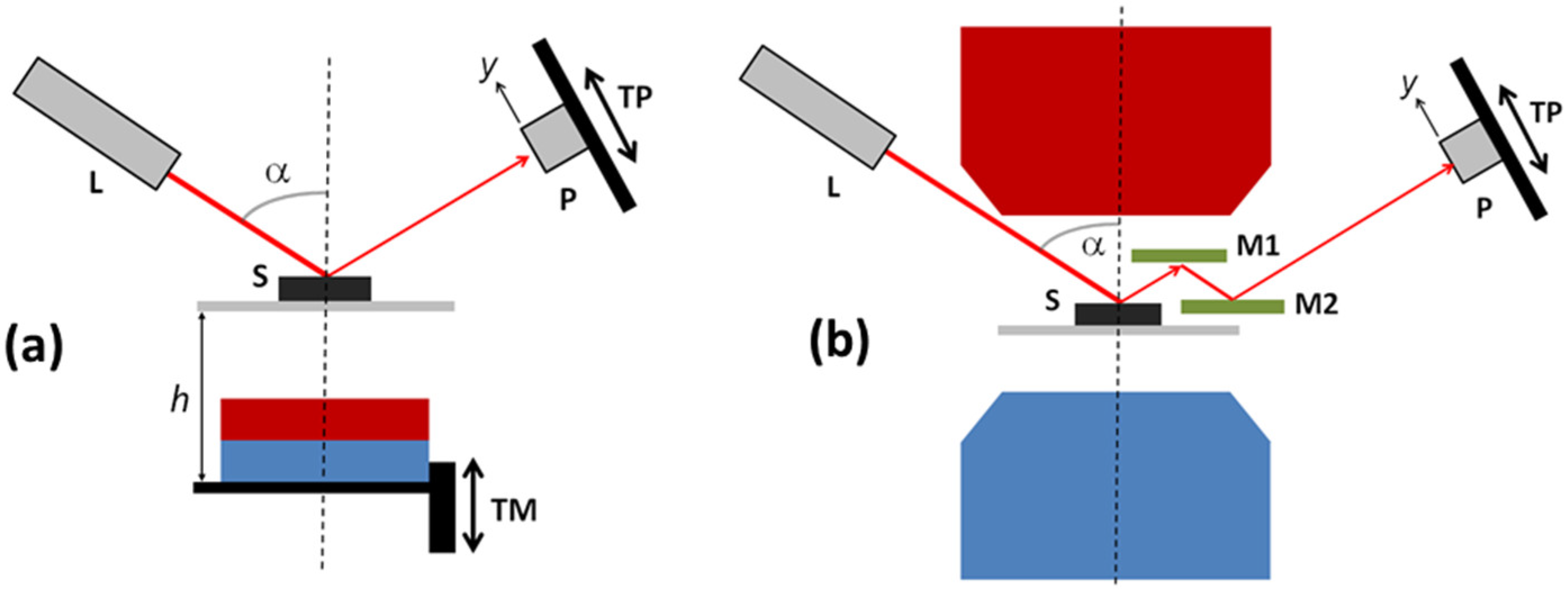
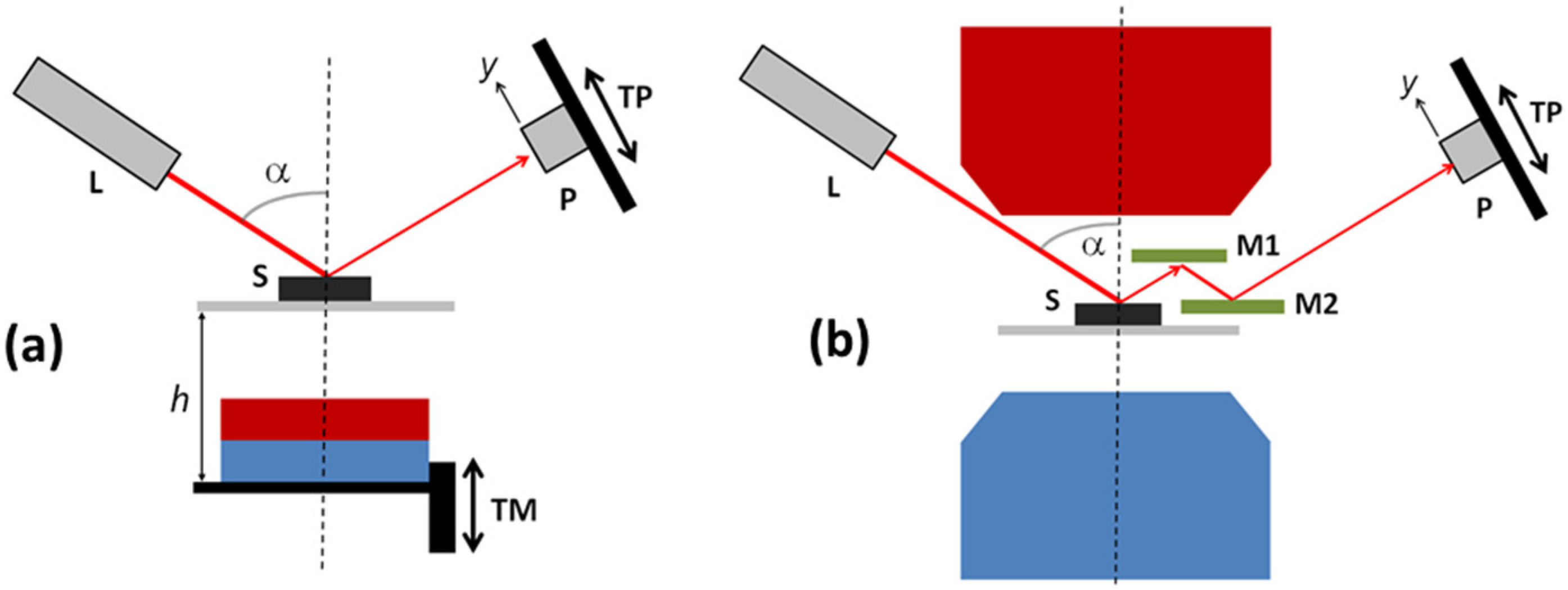
2.3. Spread Optical Reflection Measurements
3. Results
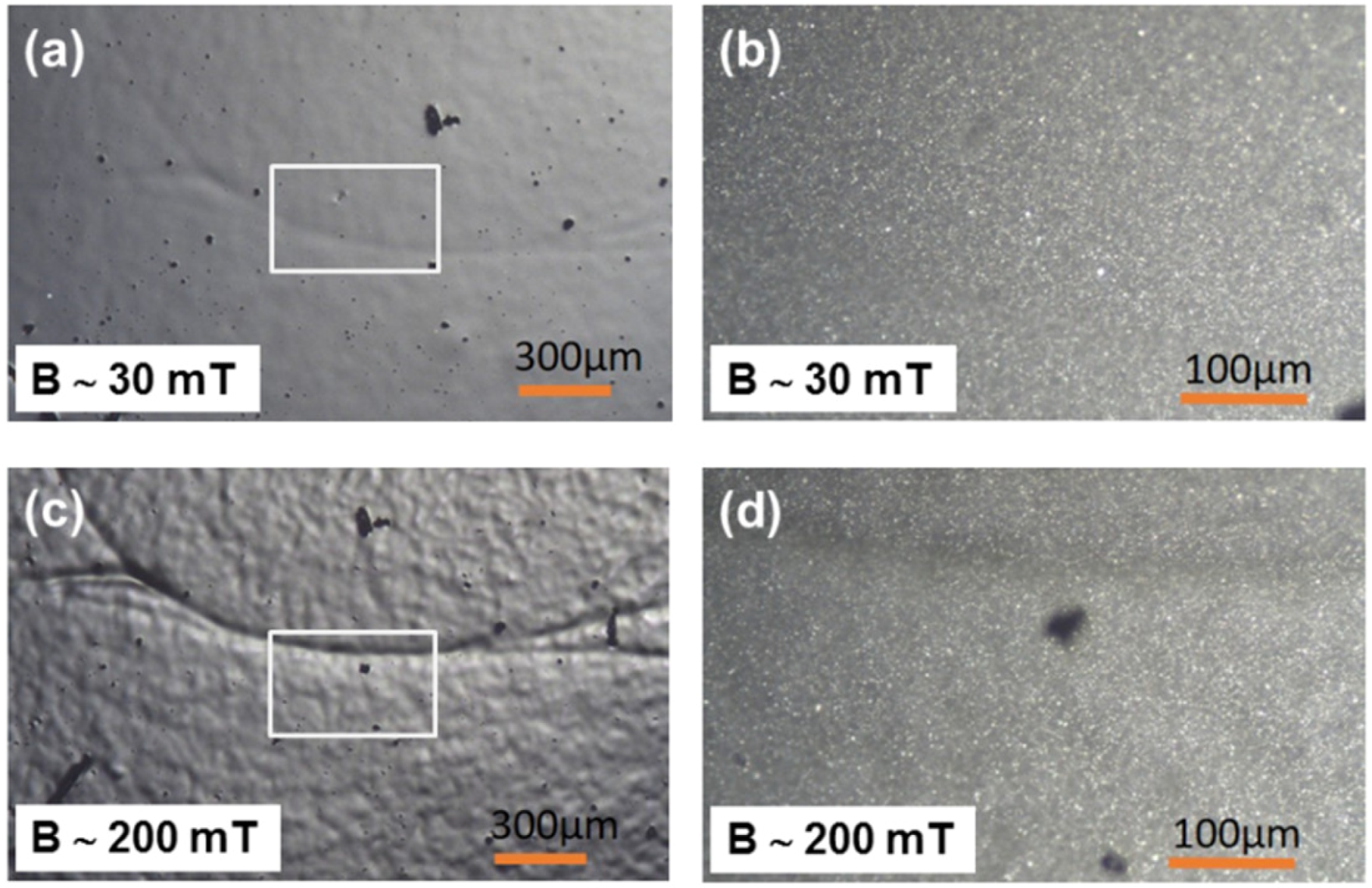
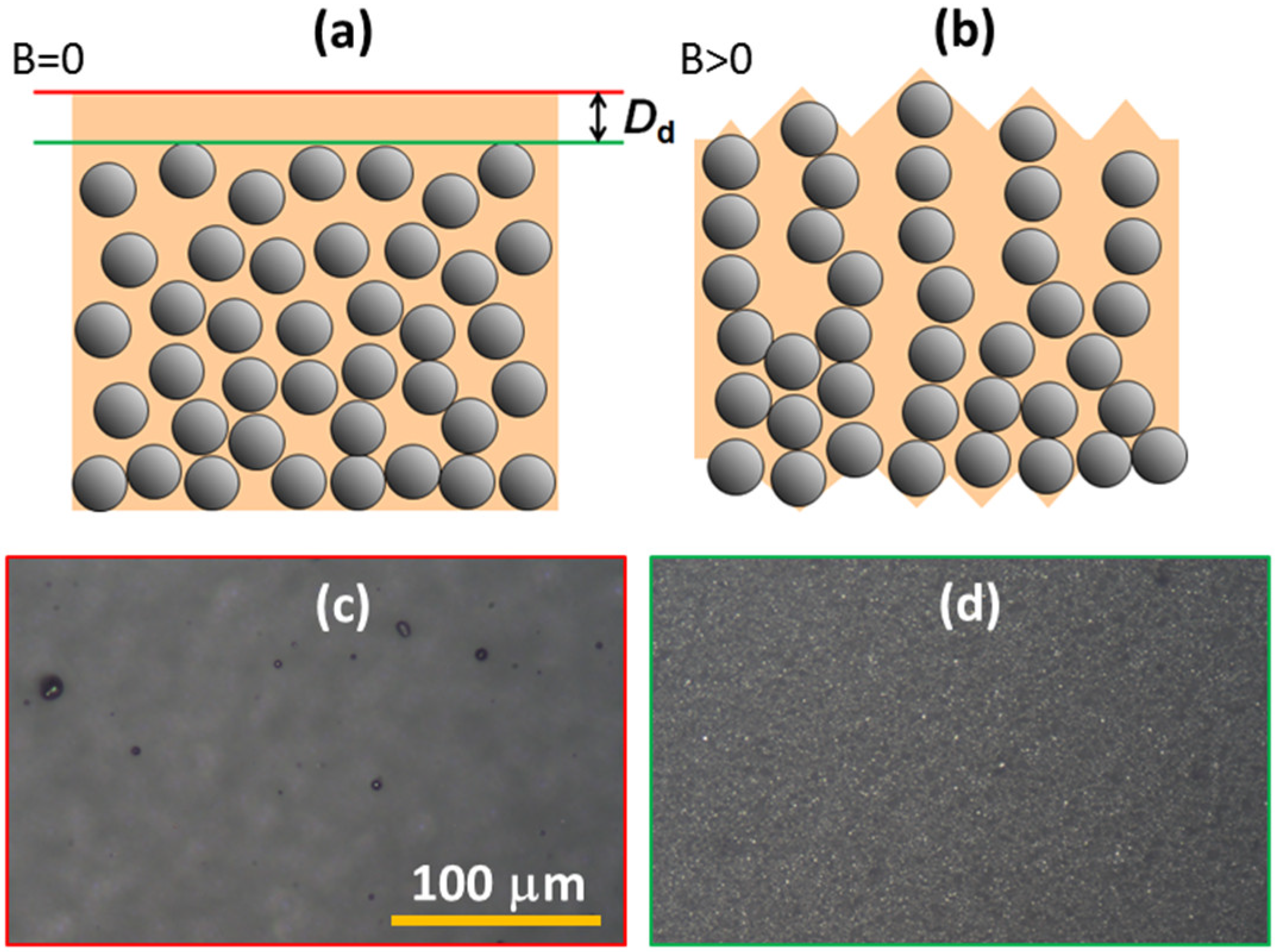
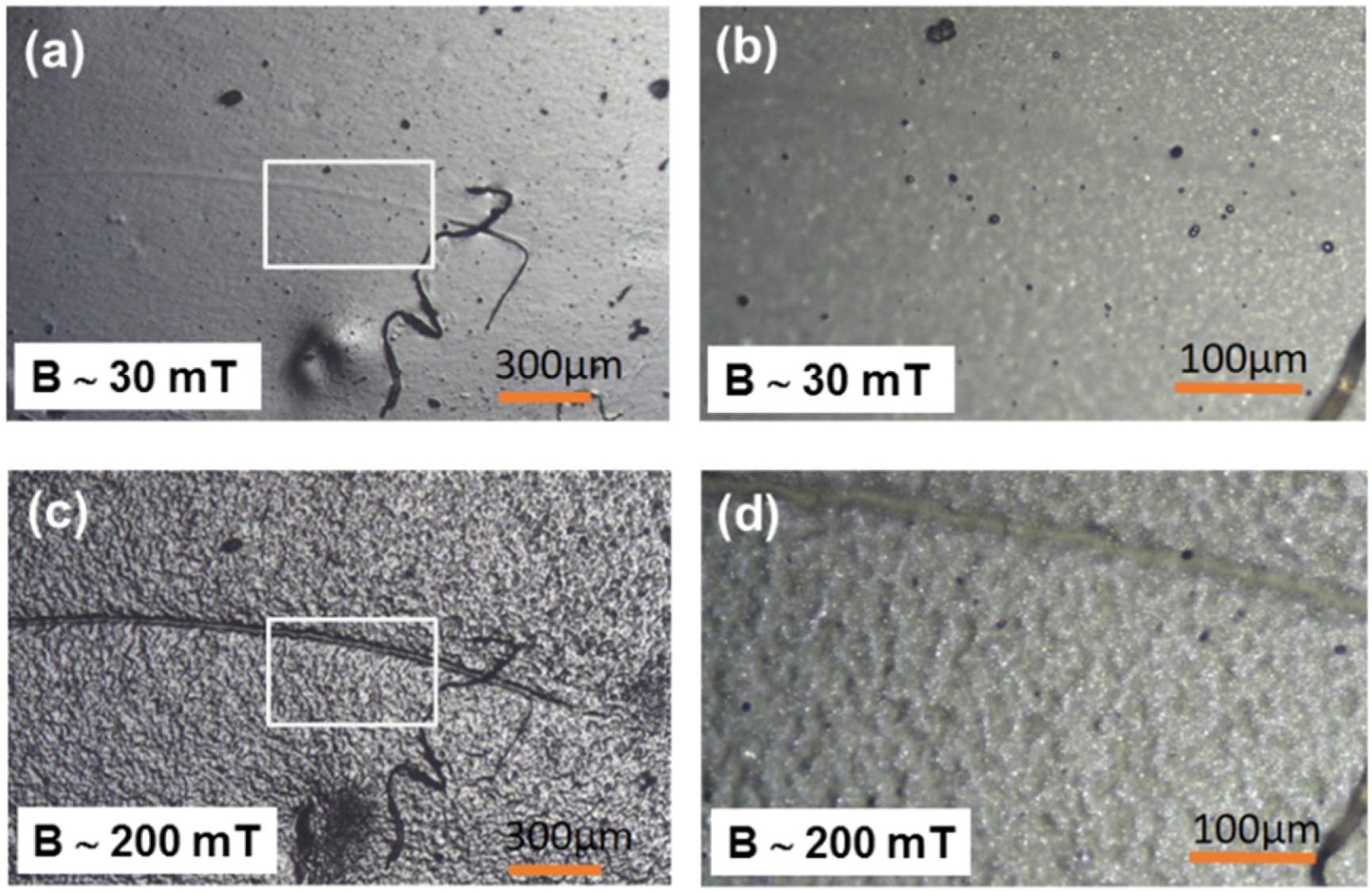
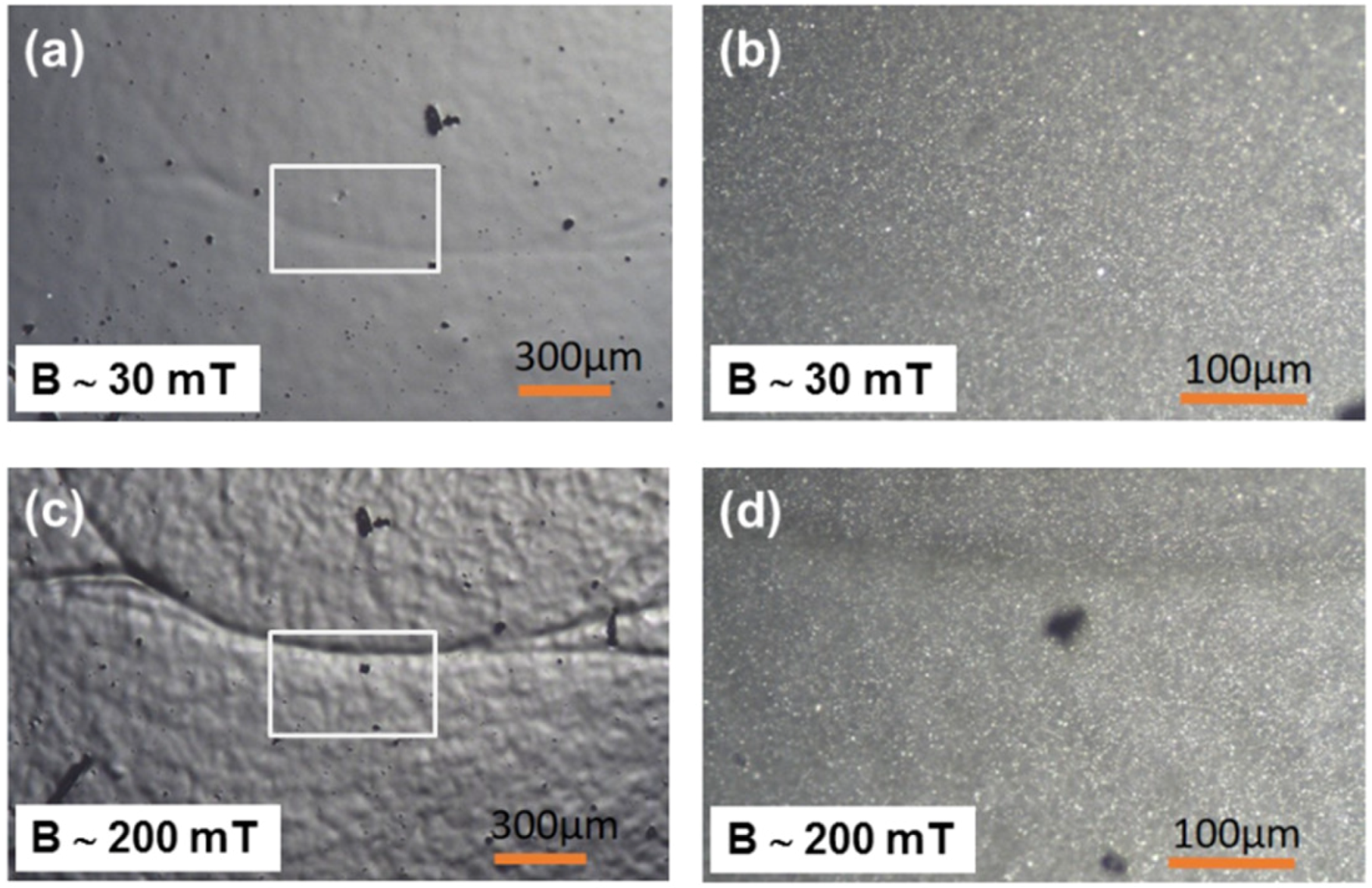
3.1. Optical Microscopy
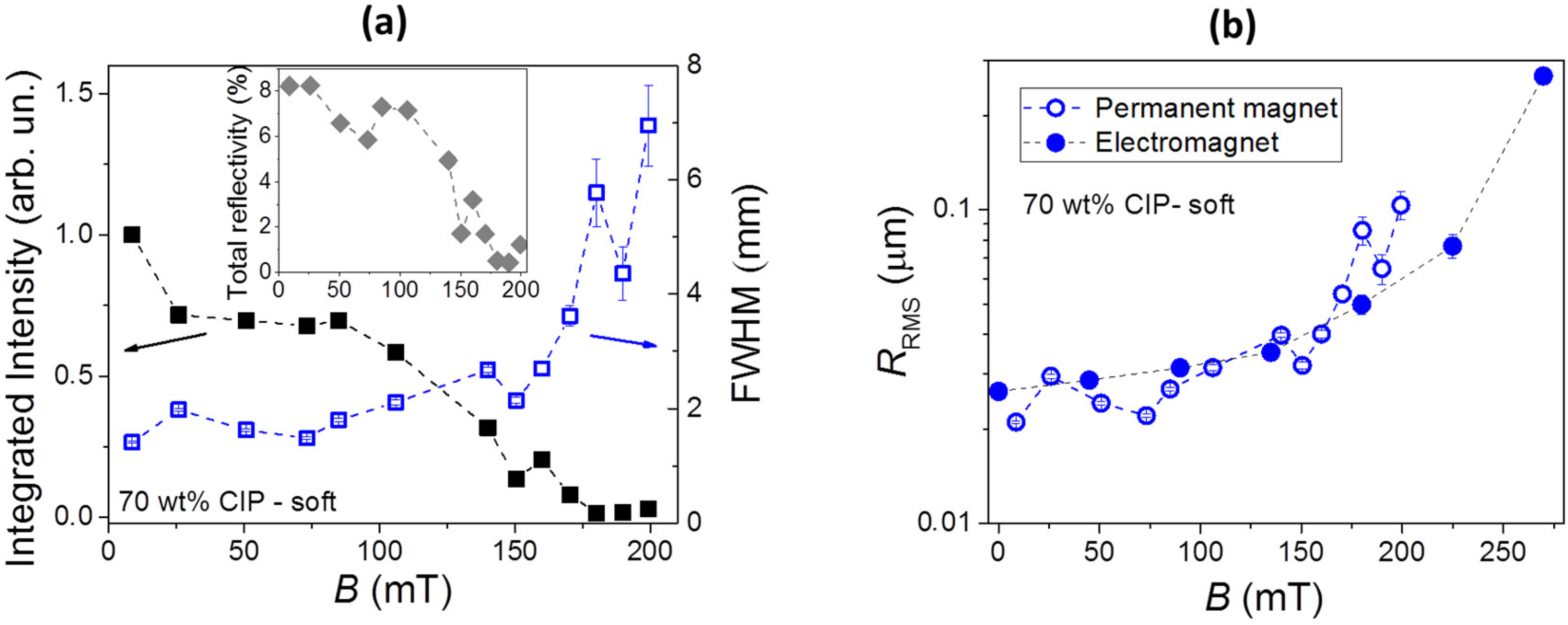
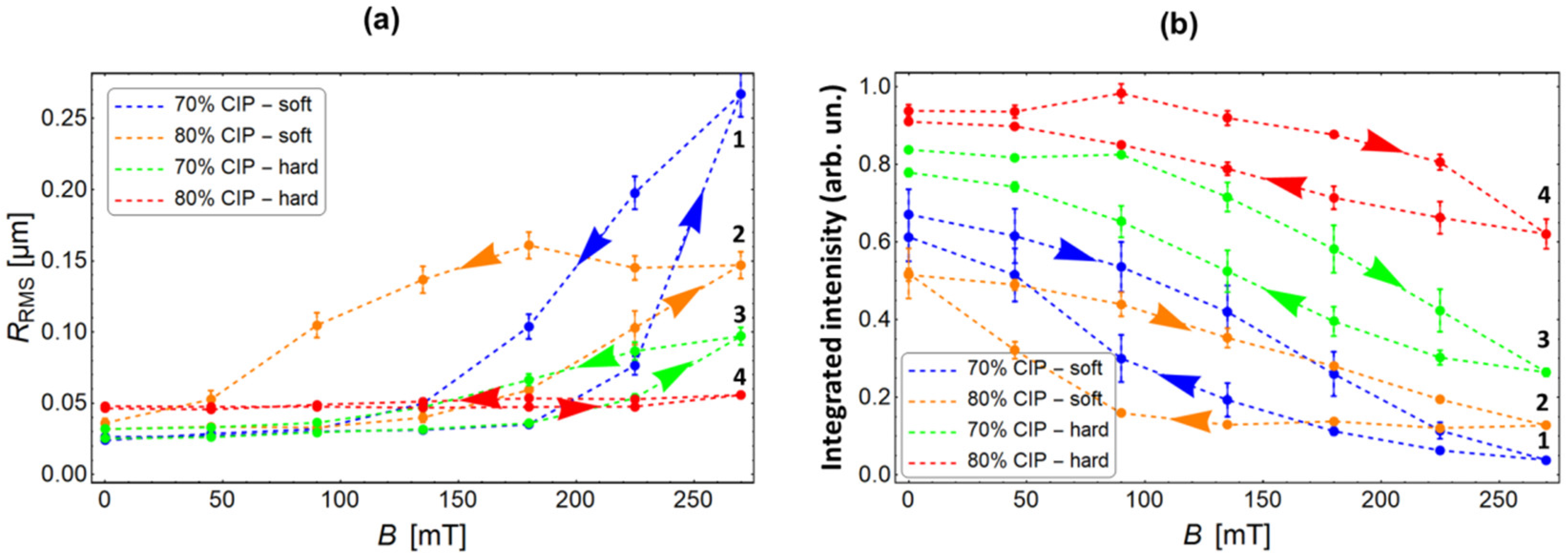
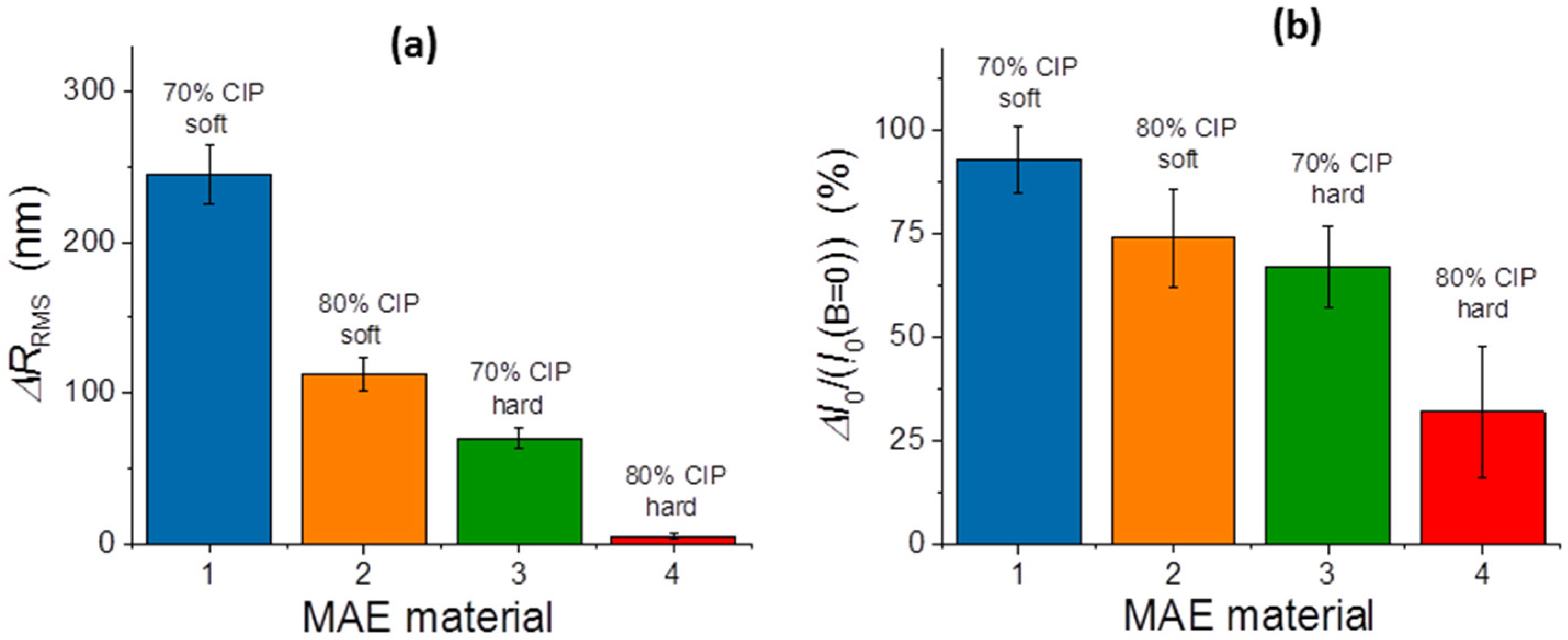
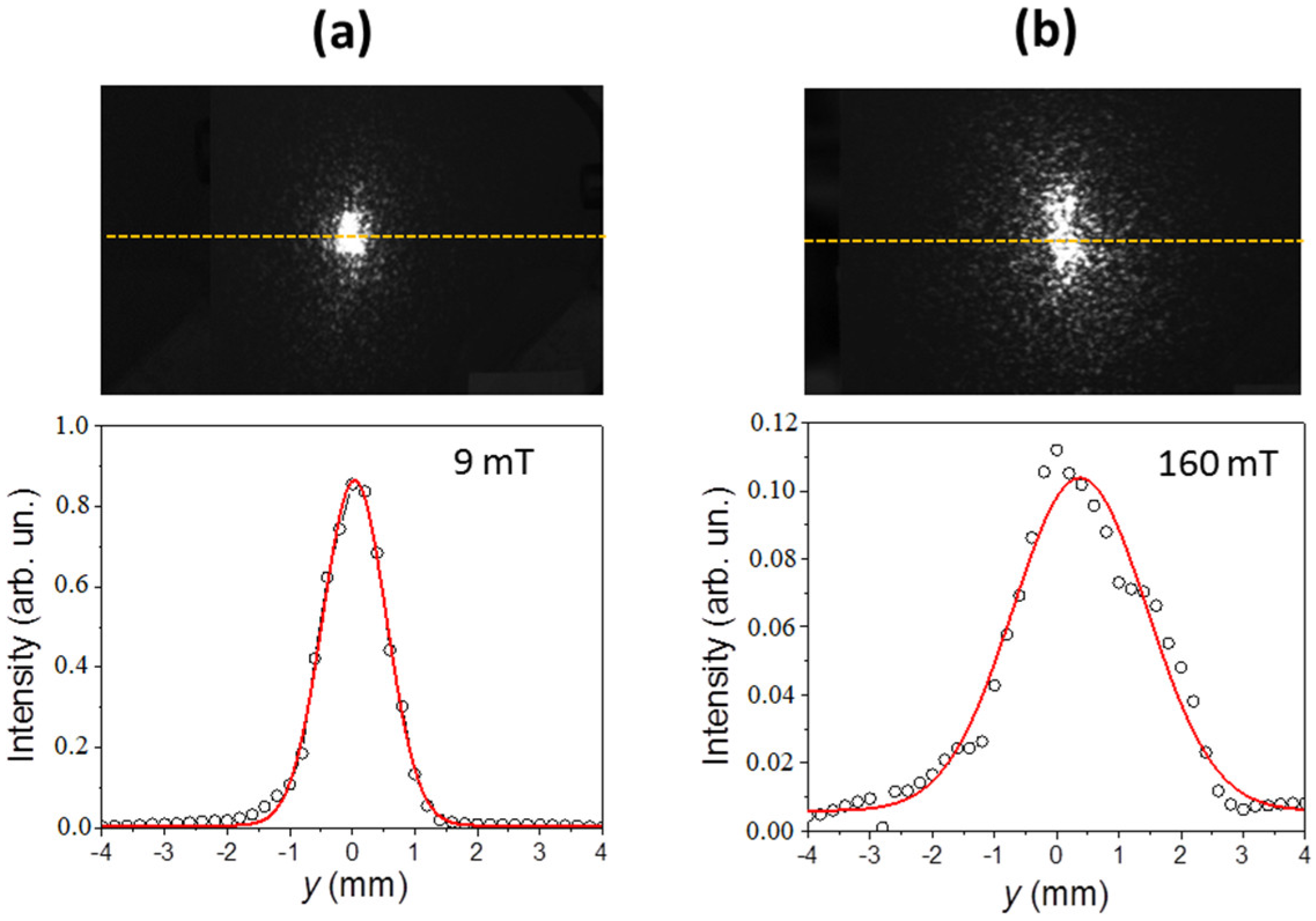
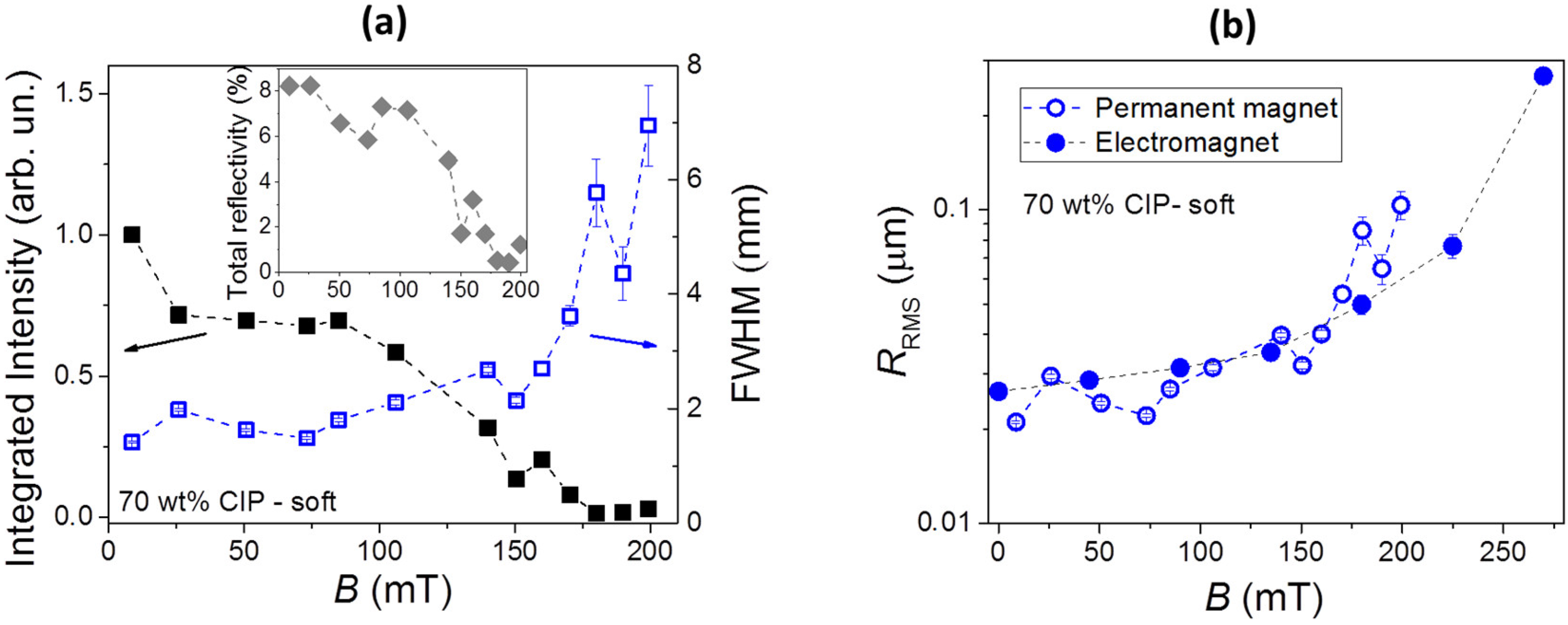
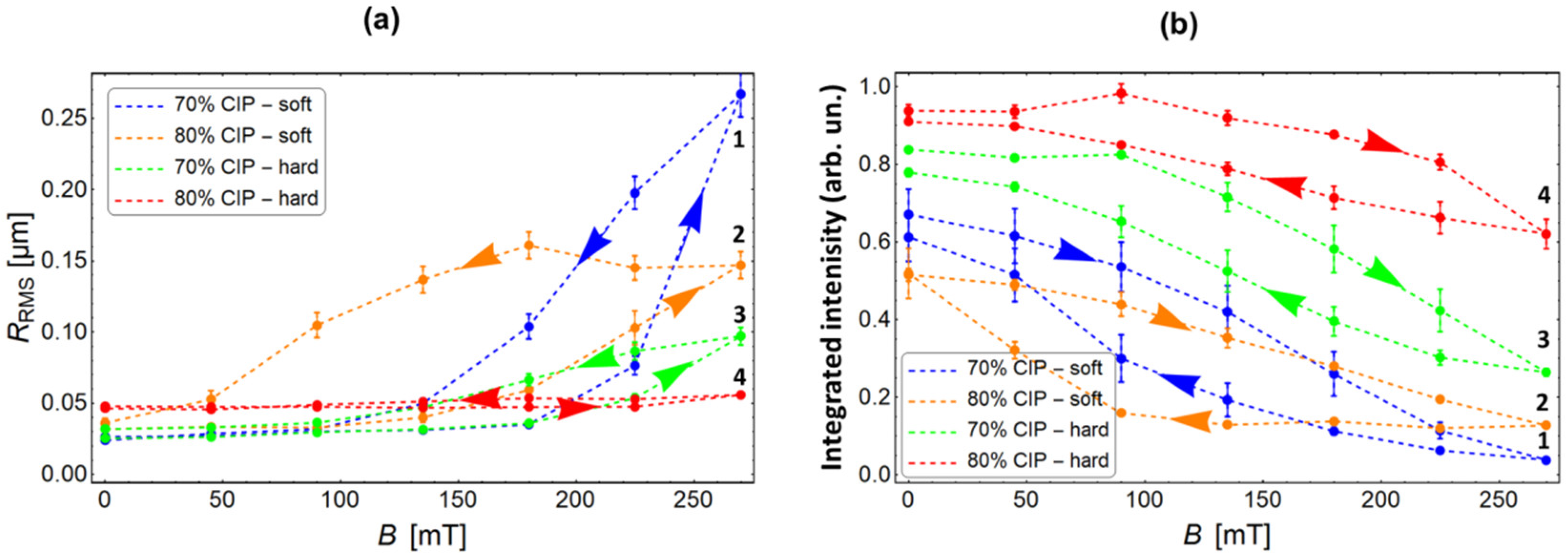
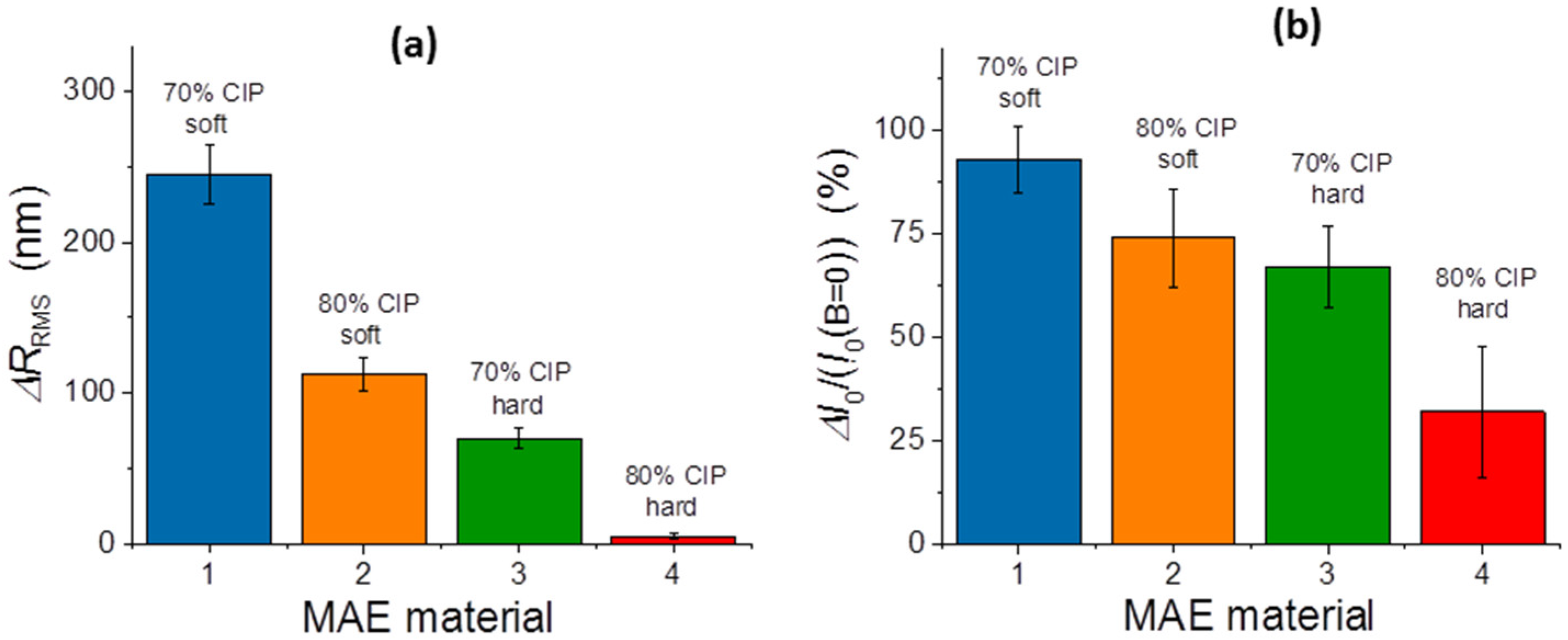
3.2. Spread Optical Reflection Measurements
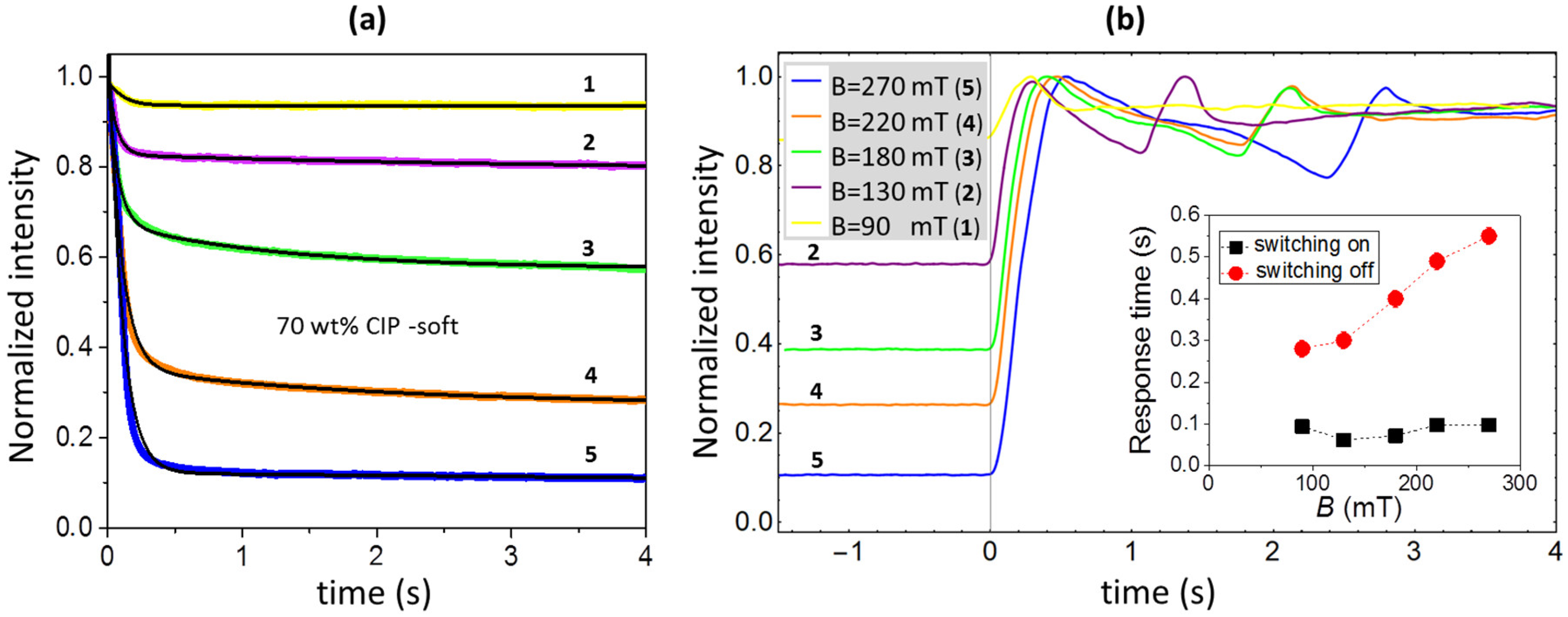
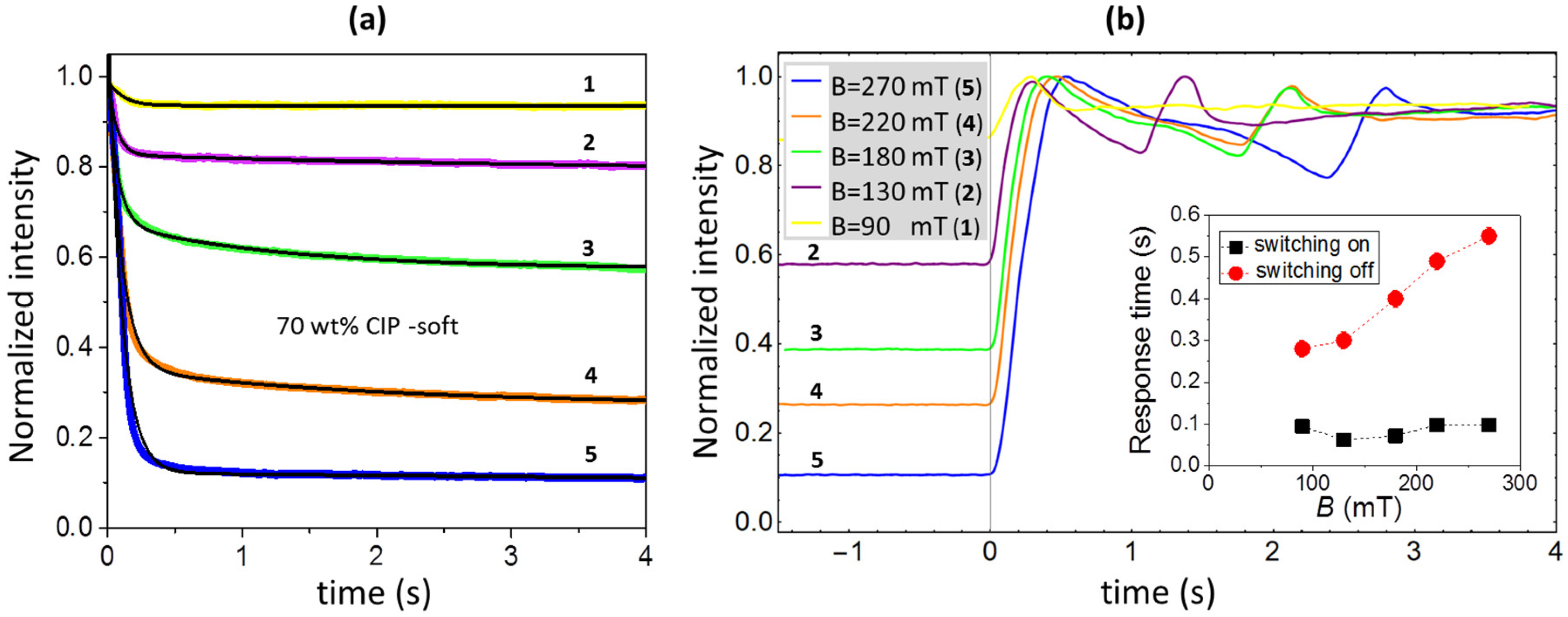
3.3. Response Processes
4. Discussion
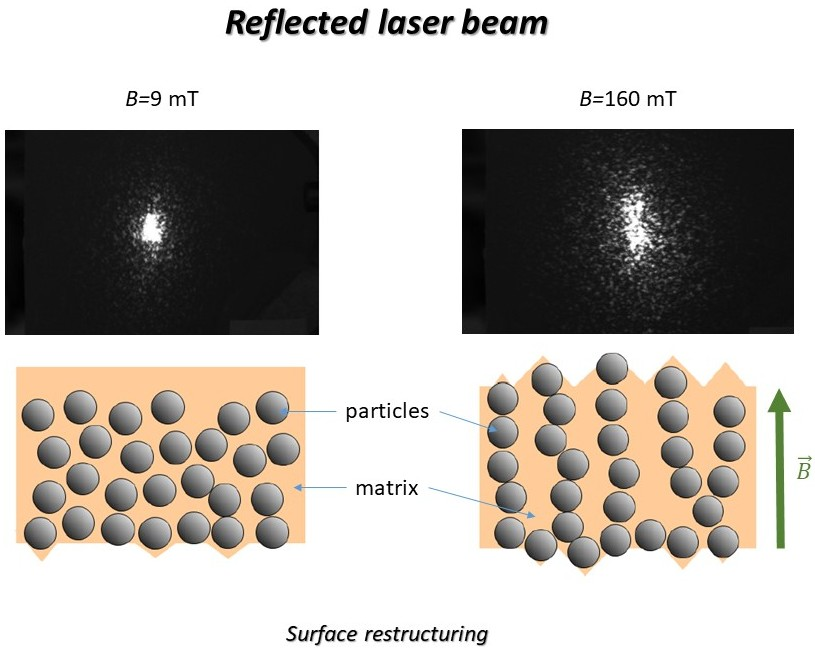
4.1. Proposed Scenario of Surface Restructuring
4.2. Main Observations
4.3. Remaining Open Questions
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Filipcsei, G.; Csetneki, I.; Szilágyi, A.; Zrínyi, M. Magnetic Field-Responsive Smart Polymer Composites. In Oligomers, Polymer Composites, Molecular Imprinting; Advances in Polymer Science; Springer: Berlin/Heidelberg, Germany, 2007; pp. 137–189. ISBN 978-3-540-46829-5. [Google Scholar]
- Abramchuk, S.; Kramarenko, E.; Stepanov, G.; Nikitin, L.V.; Filipcsei, G.; Khokhlov, A.R.; Zrínyi, M. Novel highly elastic magnetic materials for dampers and seals: Part I. Preparation and characterization of the elastic materials. Polym. Adv. Technol. 2007, 18, 883–890. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Li, W.; Du, H. A state-of-the-art review on magnetorheological elastomer devices. Smart Mater. Struct. 2014, 23, 123001. [Google Scholar] [CrossRef]
- Sutrisno, J.; Purwanto, A.; Mazlan, S.A. Recent Progress on Magnetorheological Solids: Materials, Fabrication, Testing, and Applications: Recent Progress on Magnetorheological Solids. Adv. Eng. Mater. 2015, 17, 563–597. [Google Scholar]
- Lopez-Lopez, M.T.; Durán, J.D.G.; Iskakova, L.Y.; Zubarev, A.Y. Mechanics of Magnetopolymer Composites: A Review. J. Nanofluids 2016, 5, 479–495. [Google Scholar] [CrossRef]
- Odenbach, S. Microstructure and rheology of magnetic hybrid materials. Arch. Appl. Mech. 2016, 86, 269–279. [Google Scholar] [CrossRef]
- Cantera, M.A.; Behrooz, M.; Gibson, R.F.; Gordaninejad, F. Modeling of magneto-mechanical response of magnetorheological elastomers (MRE) and MRE-based systems: A review. Smart Mater. Struct. 2017, 26, 023001. [Google Scholar] [CrossRef]
- Makarova, L.A.; Rodionova, V.V.; Alekhina, Y.A.; Rusakova, T.S.; Omelyanchik, A.S.; Perov, N.S. New Multiferroic Composite Materials Consisting of Ferromagnetic, Ferroelectric, and Polymer Components. IEEE Trans. Magn. 2017, 53, 1–7. [Google Scholar] [CrossRef]
- Weeber, R.; Hermes, M.; Schmidt, A.M.; Holm, C. Polymer architecture of magnetic gels: A review. J. Phys. Condens. Matter 2018, 30, 063002. [Google Scholar] [CrossRef]
- Menzel, A.M. Mesoscopic characterization of magnetoelastic hybrid materials: Magnetic gels and elastomers, their particle-scale description, and scale-bridging links. Arch. Appl. Mech. 2019, 89, 17–45. [Google Scholar] [CrossRef]
- Kikuchi, T.; Kobayashi, Y.; Kawai, M.; Mitsumata, T. Elastic Properties of Magnetorheological Elastomers in a Heterogeneous Uniaxial Magnetic Field. Int. J. Mol. Sci. 2018, 19, 3045. [Google Scholar] [CrossRef] [PubMed]
- De Vicente, J.; Klingenberg, D.J.; Hidalgo-Alvarez, R. Magnetorheological fluids: A review. Soft Matter 2011, 7, 3701. [Google Scholar] [CrossRef]
- Wereley, N. Magnetorheology: Advances and Applications; Royal Society of Chemistry: London, UK, 2013; Volume 6. [Google Scholar]
- Nanpo, J.; Kawai, M.; Mitsumata, T. Magnetic-field Sensitivity for Magnetic Elastomers with Various Elasticities. Chem. Lett. 2016, 45, 785–786. [Google Scholar] [CrossRef]
- Chertovich, A.V.; Stepanov, G.V.; Kramarenko, E.Y.; Khokhlov, A.R. New Composite Elastomers with Giant Magnetic Response. Macromol. Mater. Eng. 2010, 295, 336–341. [Google Scholar] [CrossRef]
- Stoll, A.; Mayer, M.; Monkman, G.J.; Shamonin, M. Evaluation of highly compliant magneto-active elastomers with colossal magnetorheological response. J. Appl. Polym. Sci. 2014, 131, 39793. [Google Scholar] [CrossRef]
- Yao, J.; Sun, Y.; Wang, Y.; Fu, Q.; Xiong, Z.; Liu, Y. Magnet-induced aligning magnetorheological elastomer based on ultra-soft matrix. Compos. Sci. Technol. 2018, 162, 170–179. [Google Scholar] [CrossRef]
- Bica, I.; Liu, Y.D.; Choi, H.J. Magnetic field intensity effect on plane electric capacitor characteristics and viscoelasticity of magnetorheological elastomer. Colloid Polym. Sci. 2012, 290, 1115–1122. [Google Scholar] [CrossRef]
- Semisalova, A.S.; Perov, N.S.; Stepanov, G.V.; Kramarenko, E.Y.; Khokhlov, A.R. Strong magnetodielectric effects in magnetorheological elastomers. Soft Matter 2013, 9, 11318. [Google Scholar] [CrossRef]
- Belyaeva, I.A.; Kramarenko, E.Y.; Shamonin, M. Magnetodielectric effect in magnetoactive elastomers: Transient response and hysteresis. Polymer 2017, 127, 119–128. [Google Scholar] [CrossRef]
- Bica, I. Influence of the transverse magnetic field intensity upon the electric resistance of the magnetorheological elastomer containing graphite microparticles. Mater. Lett. 2009, 63, 2230–2232. [Google Scholar] [CrossRef]
- Kchit, N.; Lancon, P.; Bossis, G. Thermoresistance and giant magnetoresistance of magnetorheological elastomers. J. Phys. Appl. Phys. 2009, 42, 105506. [Google Scholar] [CrossRef]
- Stepanov, G.V.; Semerenko, D.A.; Bakhtiiarov, A.V.; Storozhenko, P.A. Magnetoresistive Effect in Magnetoactive Elastomers. J. Supercond. Nov. Magn. 2013, 26, 1055–1059. [Google Scholar] [CrossRef]
- Yu, M.; Ju, B.; Fu, J.; Liu, S.; Choi, S.-B. Magnetoresistance Characteristics of Magnetorheological Gel under a Magnetic Field. Ind. Eng. Chem. Res. 2014, 53, 4704–4710. [Google Scholar] [CrossRef]
- Ausanio, G.; Iannotti, V.; Ricciardi, E.; Lanotte, L.; Lanotte, L. Magneto-piezoresistance in magnetorheological elastomers for magnetic induction gradient or position sensors. Sens. Actuators Phys. 2014, 205, 235–239. [Google Scholar] [CrossRef]
- Wang, Y.; Xuan, S.; Ge, L.; Wen, Q.; Gong, X. Conductive magnetorheological elastomer: Fatigue dependent impedance-mechanic coupling properties. Smart Mater. Struct. 2017, 26, 015004. [Google Scholar] [CrossRef]
- Schümann, M.; Morich, J.; Kaufhold, T.; Böhm, V.; Zimmermann, K.; Odenbach, S. A mechanical characterisation on multiple timescales of electroconductive magnetorheological elastomers. J. Magn. Magn. Mater. 2018, 453, 198–205. [Google Scholar] [CrossRef]
- Ivaneyko, D.; Toshchevikov, V.; Saphiannikova, M. Dynamic-mechanical behaviour of anisotropic magneto-sensitive elastomers. Polymer 2018, 147, 95–107. [Google Scholar] [CrossRef]
- Sánchez, P.A.; Gundermann, T.; Dobroserdova, A.; Kantorovich, S.S.; Odenbach, S. Importance of matrix inelastic deformations in the initial response of magnetic elastomers. Soft Matter 2018, 14, 2170–2183. [Google Scholar] [CrossRef]
- Borin, D.; Odenbach, S.; Iskakova, L.; Zubarev, A. Non-ergodic tube structures in magnetic gels and suspensions. Soft Matter 2018, 14, 8537–8544. [Google Scholar] [CrossRef]
- Stolbov, O.V.; Raikher, Y.L. Magnetostriction effect in soft magnetic elastomers. Arch. Appl. Mech. 2019, 89, 63–76. [Google Scholar] [CrossRef]
- Psarra, E.; Bodelot, L.; Danas, K. Two-field surface pattern control via marginally stable magnetorheological elastomers. Soft Matter 2017, 13, 6576–6584. [Google Scholar] [CrossRef]
- Sorokin, V.V.; Sokolov, B.O.; Stepanov, G.V.; Kramarenko, E.Y. Controllable hydrophobicity of magnetoactive elastomer coatings. J. Magn. Magn. Mater. 2018, 459, 268–271. [Google Scholar] [CrossRef]
- Glavan, G.; Salamon, P.; Belyaeva, I.A.; Shamonin, M.; Drevenšek-Olenik, I. Tunable surface roughness and wettability of a soft magnetoactive elastomer. J. Appl. Polym. Sci. 2018, 135, 46221. [Google Scholar] [CrossRef]
- Cvek, M.; Mrlik, M.; Sevcik, J.; Sedlacik, M. Tailoring Performance, Damping, and Surface Properties of Magnetorheological Elastomers via Particle-Grafting Technology. Polymers 2018, 10, 1411. [Google Scholar] [CrossRef] [PubMed]
- Sánchez, P.A.; Minina, E.S.; Kantorovich, S.S.; Kramarenko, E.Y. Surface relief of magnetoactive elastomeric films in a homogeneous magnetic field: Molecular dynamics simulations. Soft Matter 2019, 15, 175–189. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; Dong, S.; Wang, X.; Li, W. Magneto-induced surface morphologies in magnetorheological elastomer films: An analytical study. Smart Mater. Struct. 2019, 28, 045016. [Google Scholar]
- Gong, X.; Liao, G.; Xuan, S. Full-field deformation of magnetorheological elastomer under uniform magnetic field. Appl. Phys. Lett. 2012, 100, 211909. [Google Scholar] [CrossRef]
- Lee, D.-W.; Lee, K.; Lee, C.-H.; Kim, C.-H.; Cho, W.-O. A Study on the Tribological Characteristics of a Magneto-Rheological Elastomer. J. Tribol. 2012, 135, 014501. [Google Scholar] [CrossRef]
- Lian, C.; Lee, K.-H.; Lee, C.-H. Friction and wear characteristics of magnetorheological elastomer under vibration conditions. Tribol. Int. 2016, 98, 292–298. [Google Scholar] [CrossRef]
- Chen, S.; Li, R.; Li, X.; Wang, X. Magnetic Field Induced Surface Micro-Deformation of Magnetorheological Elastomers for Roughness Control. Front. Mater. 2018, 5, 76. [Google Scholar] [CrossRef]
- Vidiasheva, I.V.; Abalymov, A.A.; Kurochkin, M.A.; Mayorova, O.A.; Lomova, M.V.; German, S.V.; Khalenkow, D.N.; Zharkov, M.N.; Gorin, D.A.; Skirtach, A.G.; et al. Transfer of cells with uptaken nanocomposite, magnetite-nanoparticle functionalized capsules with electromagnetic tweezers. Biomater. Sci. 2018, 6, 2219–2229. [Google Scholar] [CrossRef]
- Lee, C.-H.; Jang, M.-G. Virtual Surface Characteristics of a Tactile Display Using Magneto-Rheological Fluids. Sensors 2011, 11, 2845–2856. [Google Scholar] [CrossRef]
- Product Details—Nano and Silicone Technology—From Monomer to Polymer. Available online: https://www.nano-and-silicone-technology.com/sites/hanse/en/products/product-search/application/pages/product-details.aspx?productId=75687&category=4363 (accessed on 22 March 2019).
- Product Details—Nano and Silicone Technology—From Monomer to Polymer. Available online: https://www.nano-and-silicone-technology.com/sites/hanse/en/products/product-search/application/pages/product-details.aspx?productId=52172&category=4363 (accessed on 22 March 2019).
- SIH Crosslinkers—Nano and Silicone Technology—From Monomer to Polymer. Available online: https://www.nano-and-silicone-technology.com/sites/hanse/en/products/addition-curing-silicones/sih-crosslinkers/pages/product-details.aspx?valueId=20948&productId=52177 (accessed on 22 March 2019).
- Bejenariu, A.G.; Poulsen, J. Ő.; Skov, A.L.; Henriksen, L. A Comparative Study on the Influence of the Platinum Catalyst in Poly(dimethylsiloxane) Based Networks Synthesis. Ann. Trans. Nord. Rheol. Soc. 2009, 17, 269–276. [Google Scholar]
- Bosq, N.; Guigo, N.; Persello, J.; Sbirrazzuoli, N. Melt and glass crystallization of PDMS and PDMS silica nanocomposites. Phys. Chem. Chem. Phys. 2014, 16, 7830–7840. [Google Scholar] [CrossRef] [PubMed]
- Sorokin, V.V.; Belyaeva, I.A.; Shamonin, M.; Kramarenko, E.Y. Magnetorheological response of highly filled magnetoactive elastomers from perspective of mechanical energy density: Fractal aggregates above the nanometer scale? Phys. Rev. E 2017, 95, 062501. [Google Scholar] [CrossRef] [PubMed]
- Nayar, S.K.; Ikeuchi, K.; Kanade, T. Surface reflection: Physical and geometrical perspectives. IEEE Trans. Pattern Anal. Mach. Intell. 1991, 13, 611–634. [Google Scholar] [CrossRef]
- Lian, C.; Lee, K.; An, J.; Lee, C. Effect of stick-slip on magneto-rheological elastomer with a magnetic field. Friction 2017, 5, 383–391. [Google Scholar] [CrossRef]
- Chambers, J.M.; Wereley, N.M. Vertical Axis Inductance Monitoring System to Measure Stratification in a Column of Magnetorheological Fluid. IEEE Trans. Magn. 2017, 53, 1–5. [Google Scholar] [CrossRef]
- Gundermann, T.; Cremer, P.; Löwen, H.; Menzel, A.M.; Odenbach, S. Statistical analysis of magnetically soft particles in magnetorheological elastomers. Smart Mater. Struct. 2017, 26, 045012. [Google Scholar] [CrossRef]
- Shuib, R.K.; Pickering, K.L.; Mace, B.R. Dynamic properties of magnetorheological elastomers based on iron sand and natural rubber. J. Appl. Polym. Sci. 2015, 132, 41506. [Google Scholar] [CrossRef]
- Romeis, D.; Toshchevikov, V.; Saphiannikova, M. Elongated micro-structures in magneto-sensitive elastomers: A dipolar mean field model. Soft Matter 2016, 12, 9364–9376. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Designation | G′ (kPa) | Thickness (mm) |
|---|---|---|---|
| 1 | 70% CIP; soft | 9.1 ± 0.1 | 2.28 ± 0.01 |
| 2 | 70% CIP; hard | 32.3 ± 0.4 | 2.24 ± 0.01 |
| 3 | 80% CIP; soft | 8.0 ± 0.1 | 2.35 ± 0.01 |
| 4 | 80% CIP; hard | 35.8 ± 5.3 | 2.48 ± 0.01 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Glavan, G.; Kettl, W.; Brunhuber, A.; Shamonin, M.; Drevenšek-Olenik, I. Effect of Material Composition on Tunable Surface Roughness of Magnetoactive Elastomers. Polymers 2019, 11, 594. https://doi.org/10.3390/polym11040594
Glavan G, Kettl W, Brunhuber A, Shamonin M, Drevenšek-Olenik I. Effect of Material Composition on Tunable Surface Roughness of Magnetoactive Elastomers. Polymers. 2019; 11(4):594. https://doi.org/10.3390/polym11040594
Chicago/Turabian StyleGlavan, Gašper, Wolfgang Kettl, Alexander Brunhuber, Mikhail Shamonin, and Irena Drevenšek-Olenik. 2019. "Effect of Material Composition on Tunable Surface Roughness of Magnetoactive Elastomers" Polymers 11, no. 4: 594. https://doi.org/10.3390/polym11040594
APA StyleGlavan, G., Kettl, W., Brunhuber, A., Shamonin, M., & Drevenšek-Olenik, I. (2019). Effect of Material Composition on Tunable Surface Roughness of Magnetoactive Elastomers. Polymers, 11(4), 594. https://doi.org/10.3390/polym11040594