Mechanism Design with Singularity Avoidance of Crystal-Inspired Deployable Structures

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
3. Results
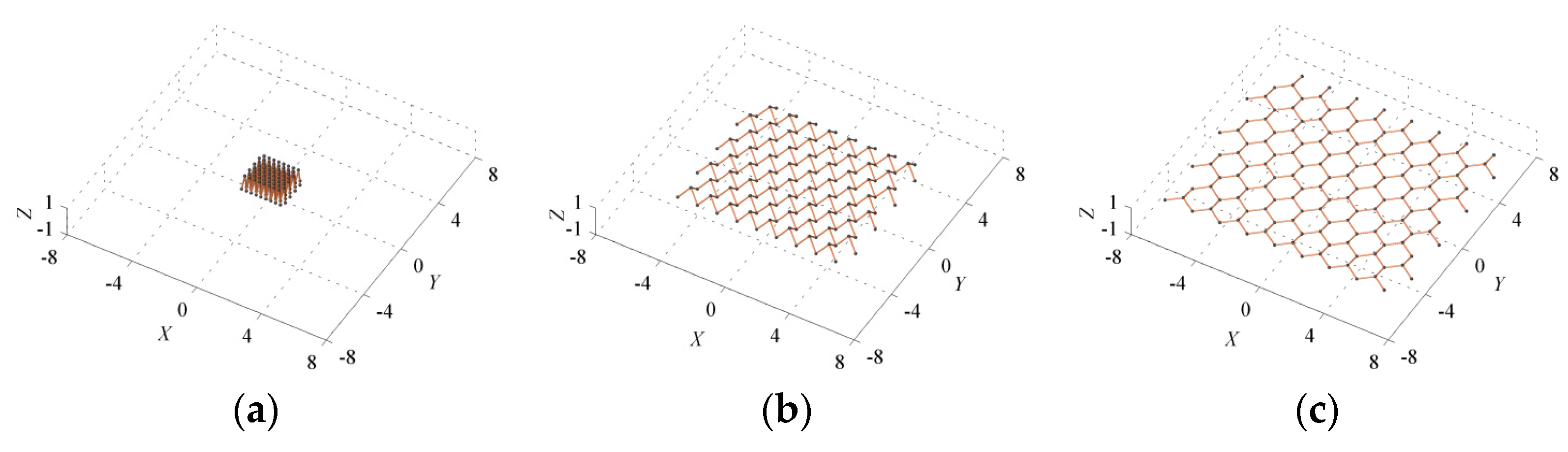
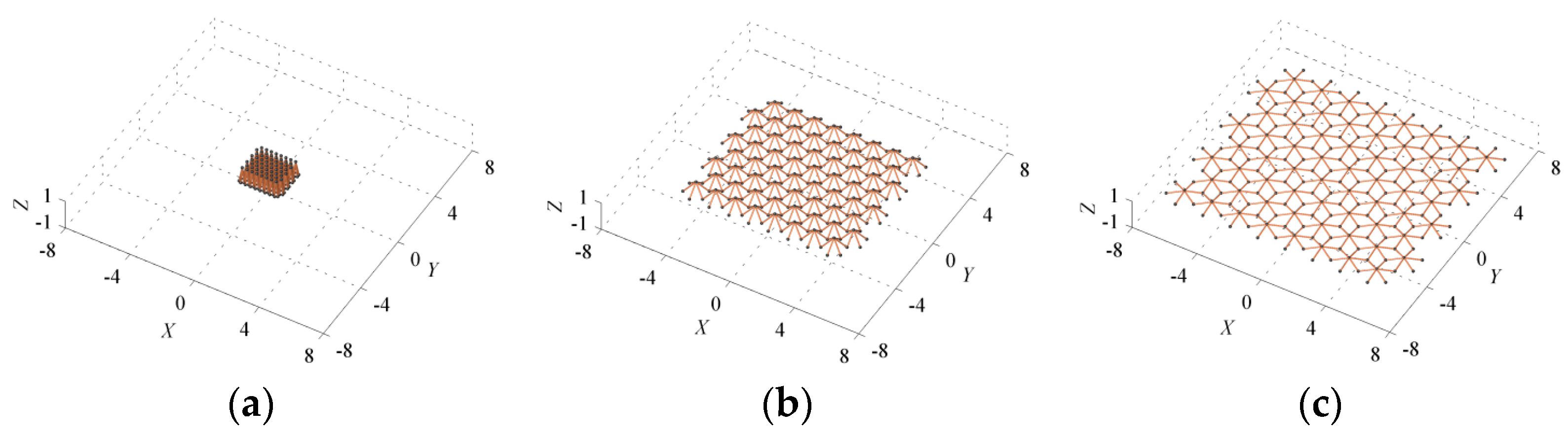
3.1. Feasible Deployable Structures with Different Types of Joints and Configurations
3.1.1. Case I: n1 = n2 = 4
3.1.2. Case II: n1 =2 and n2 = 4
3.1.3. Case III: n1 = n2 = 3
3.1.4. Case IV: n1 = 3 and n2 = 6
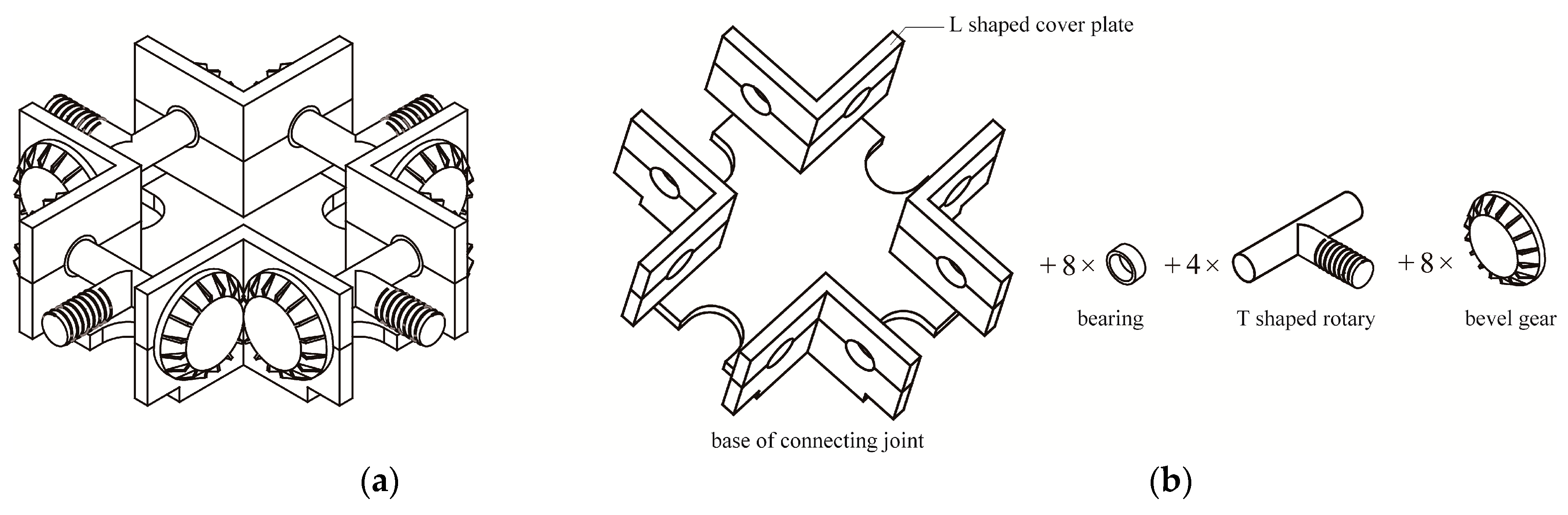
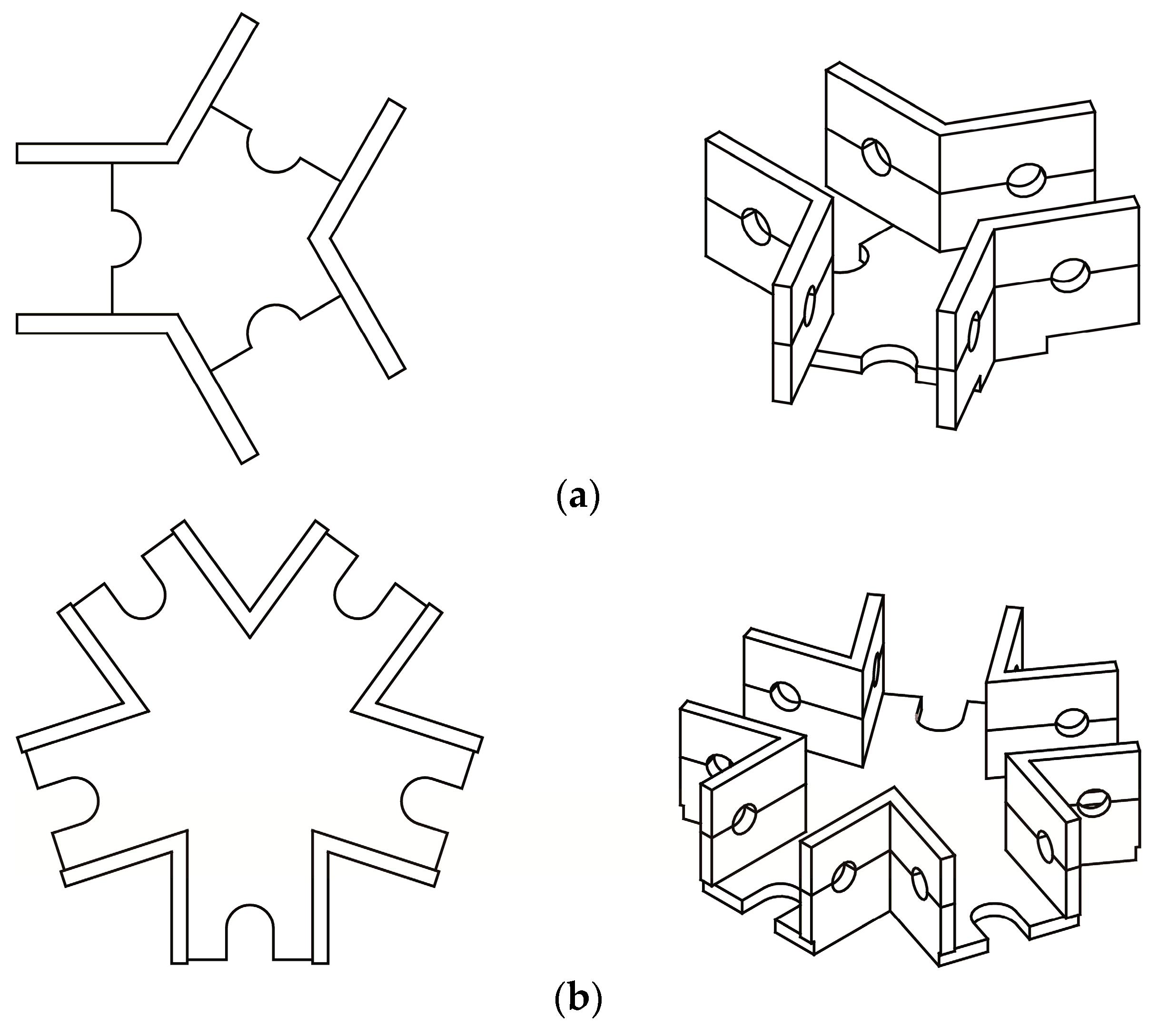
3.2. Avoiding Singularity by Novel Joints with Bevel Gears
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Pellegrino, S. Deployable Structures; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Ding, X.; Yang, Y.; Dai, J.S. Design and kinematic analysis of a novel prism deployable mechanism. Mech. Mach. Theory 2013, 63, 35–49. [Google Scholar] [CrossRef]
- Chen, Y.; Sareh, P.; Yan, J.; Fallah, A.S.; Feng, J. An integrated geometric-graph-theoretic approach to representing origami structures and their corresponding truss frameworks. J. Mech. Design-Trans. ASME 2019, 141, 091402. [Google Scholar] [CrossRef]
- Kovacs, F.; Tarnai, T.; Fowler, P.W.; Guest, S.D. A class of expandable polyhedral structures. Int. J. Solids Struct. 2004, 41, 1119–1137. [Google Scholar] [CrossRef]
- Dai, J.S.; Zoppi, M.; Kong, X. Advances in Reconfigurable Mechanisms and Robots I; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Nagaraj, B.P.; Pandiyan, R.; Ghosal, A. Kinematics of pantograph masts. Mech. Mach. Theory 2009, 44, 822–834. [Google Scholar] [CrossRef]
- Kuribayashi, K.; Tsuchiya, K.; You, Z.; Tomus, D.; Umemoto, M.; Ito, T.; Sasaki, M. Self-deployable origami stent grafts as a biomedical application of Ni-rich TiNi shape memory alloy foil. Mat. Sci. Eng. A.-Struct. 2006, 419, 131–137. [Google Scholar] [CrossRef]
- Beatini, V.; Royer-Carfagni, G. Cable-stiffened foldable elastica for movable structures. Eng. Struct. 2013, 56, 126–136. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, J.; Chu, F.; Feng, Z.; Dai, J.S. Structure synthesis and statics analysis of a foldable stair. Mech. Mach. Theory 2011, 46, 998–1015. [Google Scholar] [CrossRef]
- Patel, J.; Ananthasuresh, G.K. A kinematic theory for radially foldable planar linkages. Int. J. Solids Struct. 2007, 44, 6279–6298. [Google Scholar] [CrossRef]
- Kaveh, A.; Shojaee, S. Optimal design of scissor-link foldable structures using genetic algorithm. In Proceedings of the Fourth International Conference on Engineering Computational Technology, Lisbon, Portugal, 7–9 September 2004. [Google Scholar]
- Kumar, P.; Pellegrino, S. Computation of kinematic paths and bifurcation points. Int. J. Solids Struct. 2000, 37, 7003–7027. [Google Scholar] [CrossRef]
- Gan, W.W.; Pellegrino, S. Numerical approach to the kinematic analysis of deployable structures forming a closed loop. P. I. Mech. Eng. C-J. Mec. 2006, 220, 1045–1056. [Google Scholar] [CrossRef]
- Chen, Y.; Fan, L.; Feng, J. Kinematic of symmetric deployable scissor-hinge structures with integral mechanism mode. Comput. Struct. 2017, 191, 140–152. [Google Scholar] [CrossRef]
- Lee, M.K.; Park, K.W. Workspace and singularity analysis of a double parallel manipulator. IEEE/ASME Trans. Mech. 2000, 5, 367–375. [Google Scholar]
- Bandyopadhyay, S.; Ghosal, A. Analysis of configuration space singularities of closed-loop mechanisms and parallel manipulators. Mech. Mach. Theory 2004, 39, 519–544. [Google Scholar] [CrossRef]
- Wei, G.W.; Chen, Y.; Dai, J.S. Synthesis, mobility and multifurcation of deployable polyhedral mechanisms with radially reciprocating motion. J. Mech. Design-Trans. ASME 2014, 136, 091003. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, J.; Sun, Q. Lower-order symmetric mechanism modes and bifurcation behavior of deployable bar structures with cyclic symmetry. Int. J. Solids Struct. 2018, 139–140, 1–14. [Google Scholar] [CrossRef]
- Sheldrick, G.M. Crystal structure refinement with SHELXL. Acta Crystallogr. Sect. C Struct. Chem. 2015, 71, 3–8. [Google Scholar]
- Levine, D.; Steinhardt, P.J. Quasicrystals: A new class of ordered structures. Phys. Rev. Lett. 1984, 53, 2477. [Google Scholar] [CrossRef]
- Hunt, K.H. Kinematic Geometry of Mechanisms; Cambridge University Press: Oxford, UK, 1990. [Google Scholar]
- Guest, S.D.; Fowler, P.W. A symmetry-extended mobility rule. Mech. Mach. Theory 2005, 40, 1002–1014. [Google Scholar] [CrossRef]
- Chen, Y.; Sareh, P.; Feng, J.; Sun, Q. A computational method for automated detection of engineering structures with cyclic symmetries. Comput. Struct. 2017, 191, 153–164. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, J.; Liu, Y. A group-theoretic approach to the mobility and kinematic of symmetric over-constrained structures. Mech. Mach. Theory 2016, 105, 91–107. [Google Scholar] [CrossRef]
- Bishop, D.M. Group Theory and Chemistry; Clarendon Press: Oxford, UK, 1973. [Google Scholar]
- Chen, Y.; Feng, J.; Ren, Z. Numerical approach for detecting bifurcation points of the compatibility paths of symmetric deployable structures. Mech. Res. Commun. 2016, 71, 7–15. [Google Scholar] [CrossRef]
- Zhang, T.; Huang, H.; Guo, H.; Li, B. Singularity avoidance for a deployable mechanism using elastic joints. J. Mech. Design 2019, 141, 094501. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, J. Mobility of symmetric deployable structures subjected to external loads. Mech. Mach. Theory 2015, 93, 98–111. [Google Scholar] [CrossRef]
- Naser, M.Z.; Kodur, V.K.R. Cognitive infrastructure—A modern concept for resilient performance under extreme events. Automat. Constr. 2018, 90, 253–264. [Google Scholar] [CrossRef]
- Chen, Y.; Feng, J. Generalized eigenvalue analysis of symmetric prestressed structures using group theory. J. Compt. Civil Eng. ASCE 2012, 26, 488–497. [Google Scholar] [CrossRef]









© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Yan, J.; Feng, J. Mechanism Design with Singularity Avoidance of Crystal-Inspired Deployable Structures. Crystals 2019, 9, 421. https://doi.org/10.3390/cryst9080421
Chen Y, Yan J, Feng J. Mechanism Design with Singularity Avoidance of Crystal-Inspired Deployable Structures. Crystals. 2019; 9(8):421. https://doi.org/10.3390/cryst9080421
Chicago/Turabian StyleChen, Yao, Jiayi Yan, and Jian Feng. 2019. "Mechanism Design with Singularity Avoidance of Crystal-Inspired Deployable Structures" Crystals 9, no. 8: 421. https://doi.org/10.3390/cryst9080421
APA StyleChen, Y., Yan, J., & Feng, J. (2019). Mechanism Design with Singularity Avoidance of Crystal-Inspired Deployable Structures. Crystals, 9(8), 421. https://doi.org/10.3390/cryst9080421