
The Development and Verification of a Simulation Model of Shape-Memory Alloy Wires for Strain Prediction



Abstract
:1. Introduction
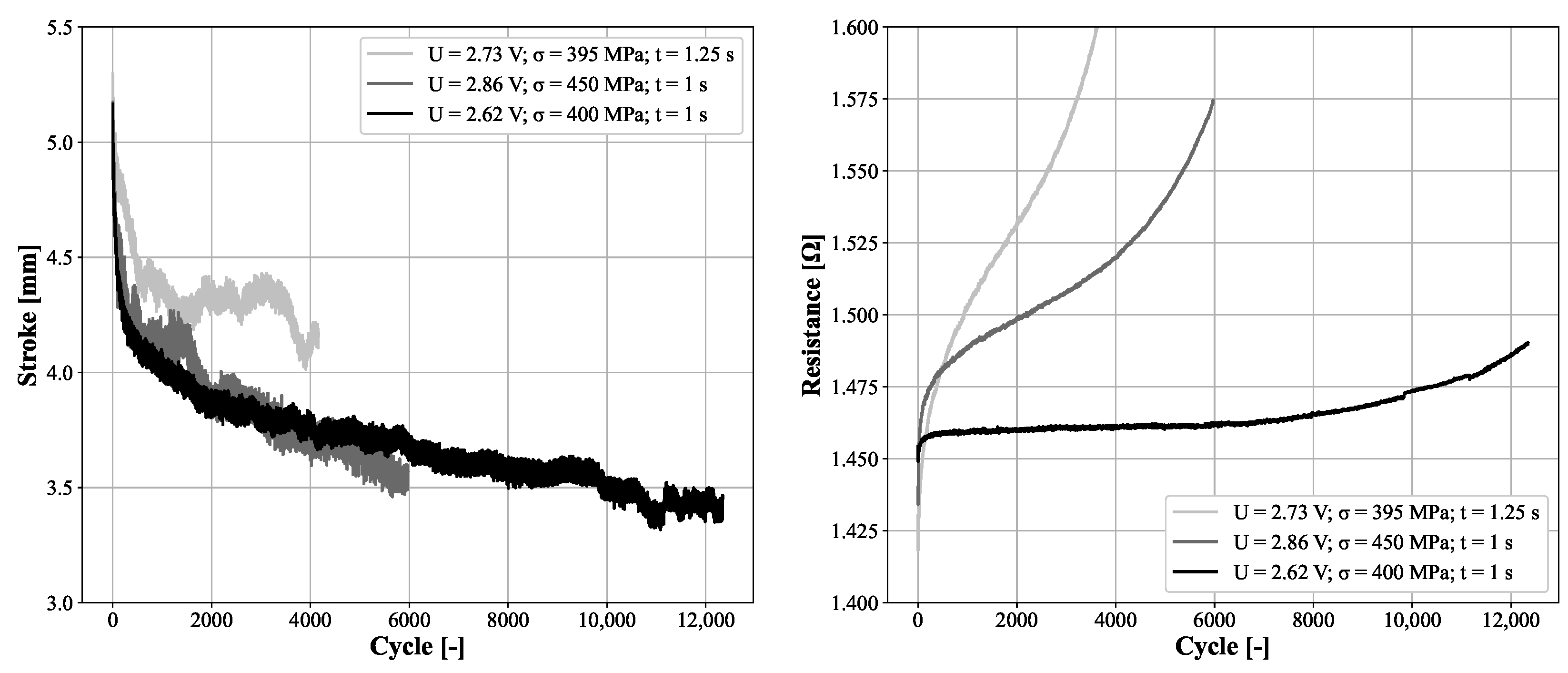
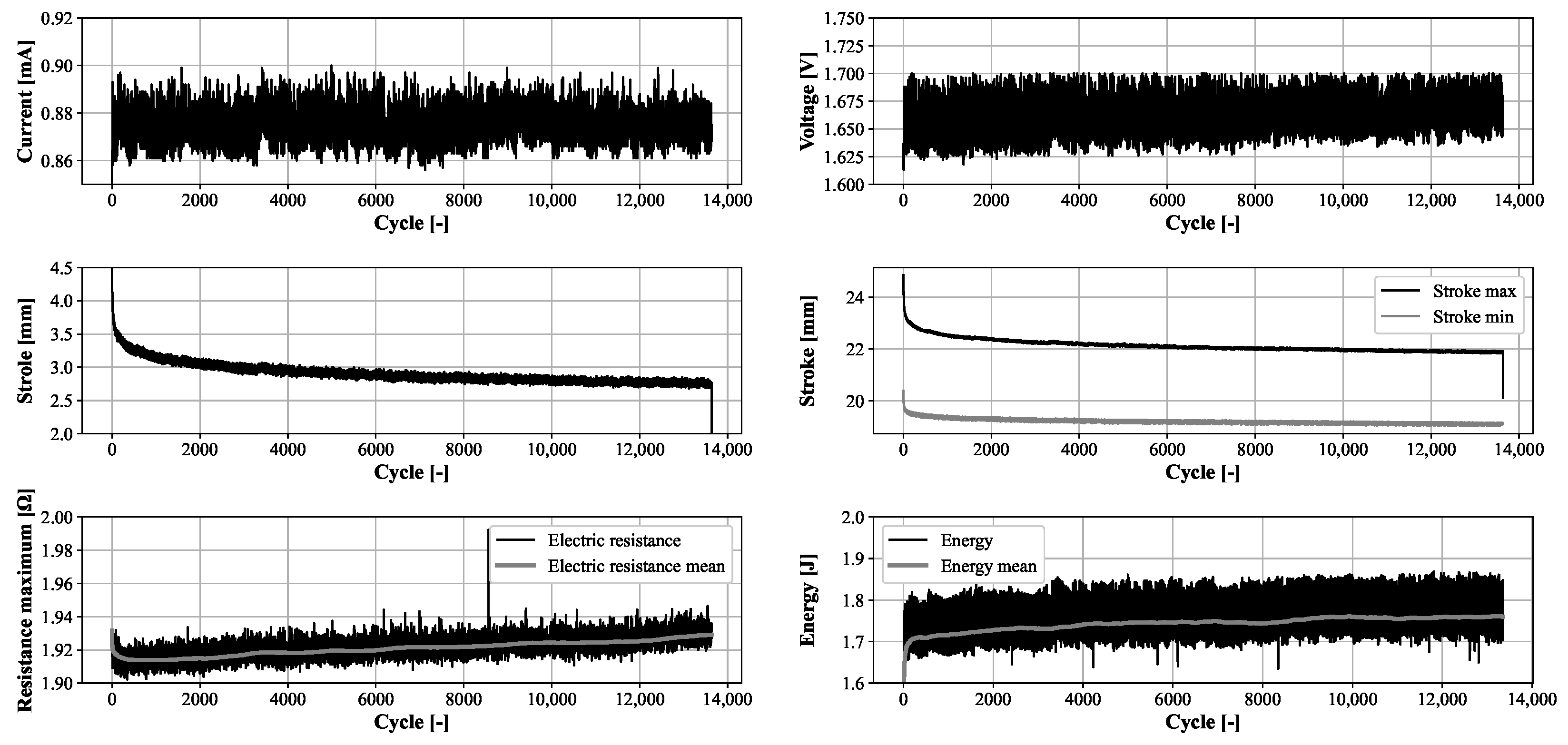
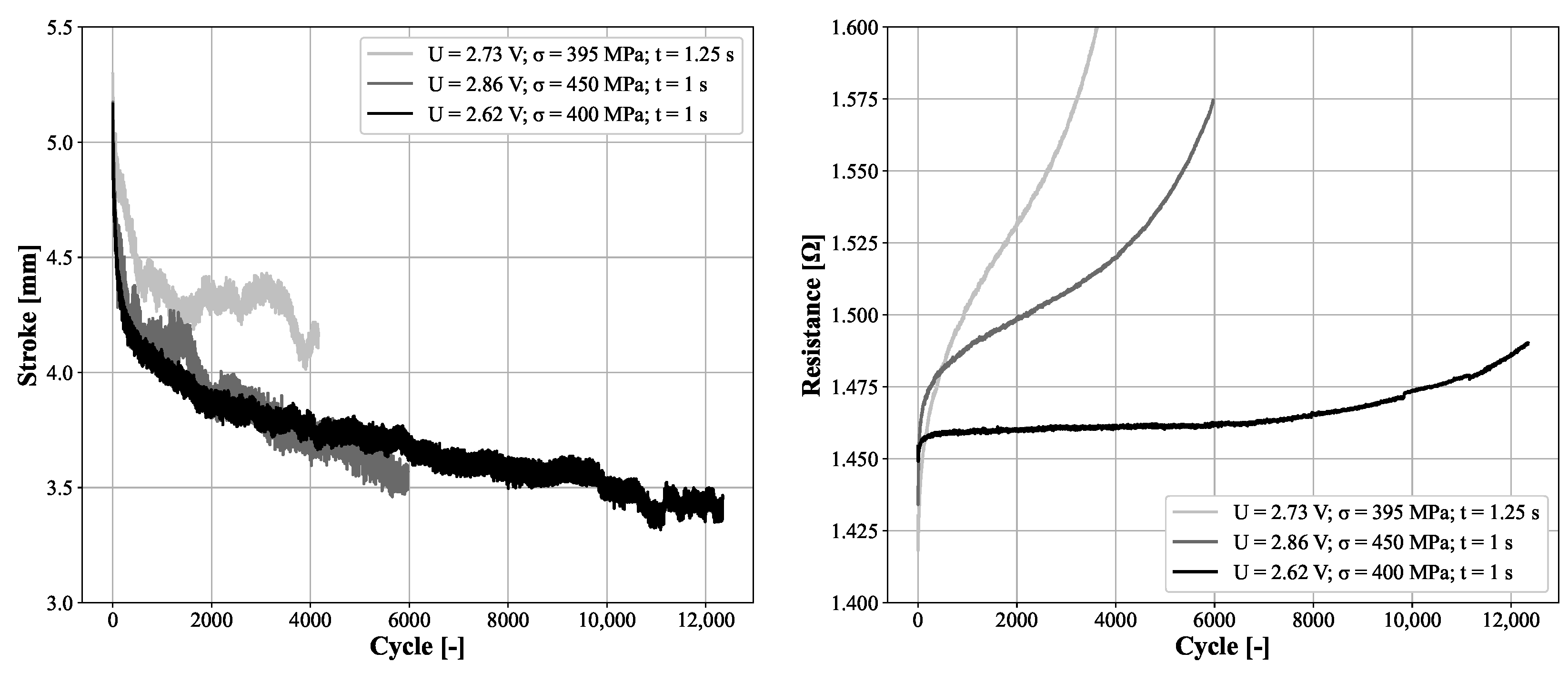
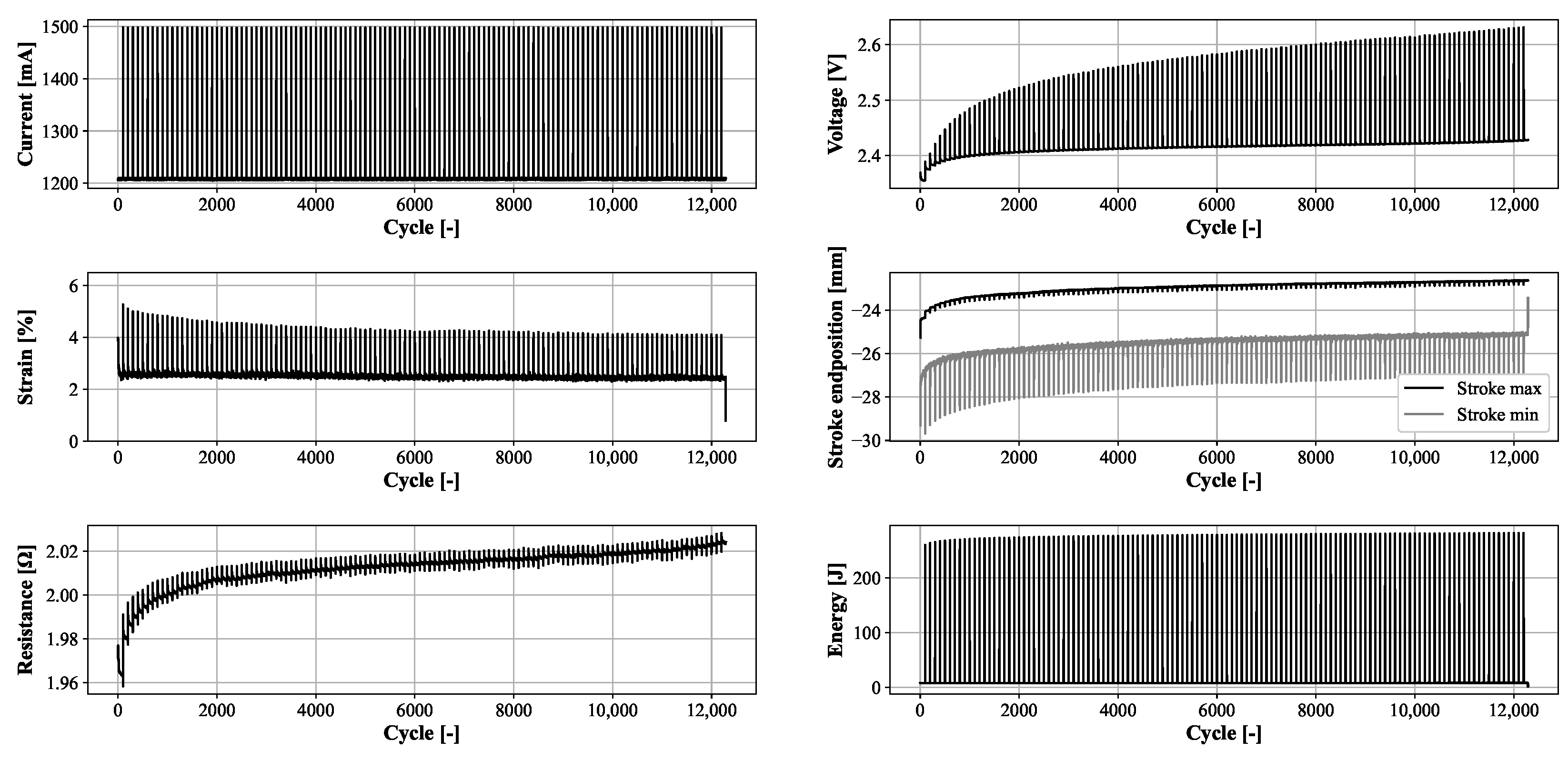
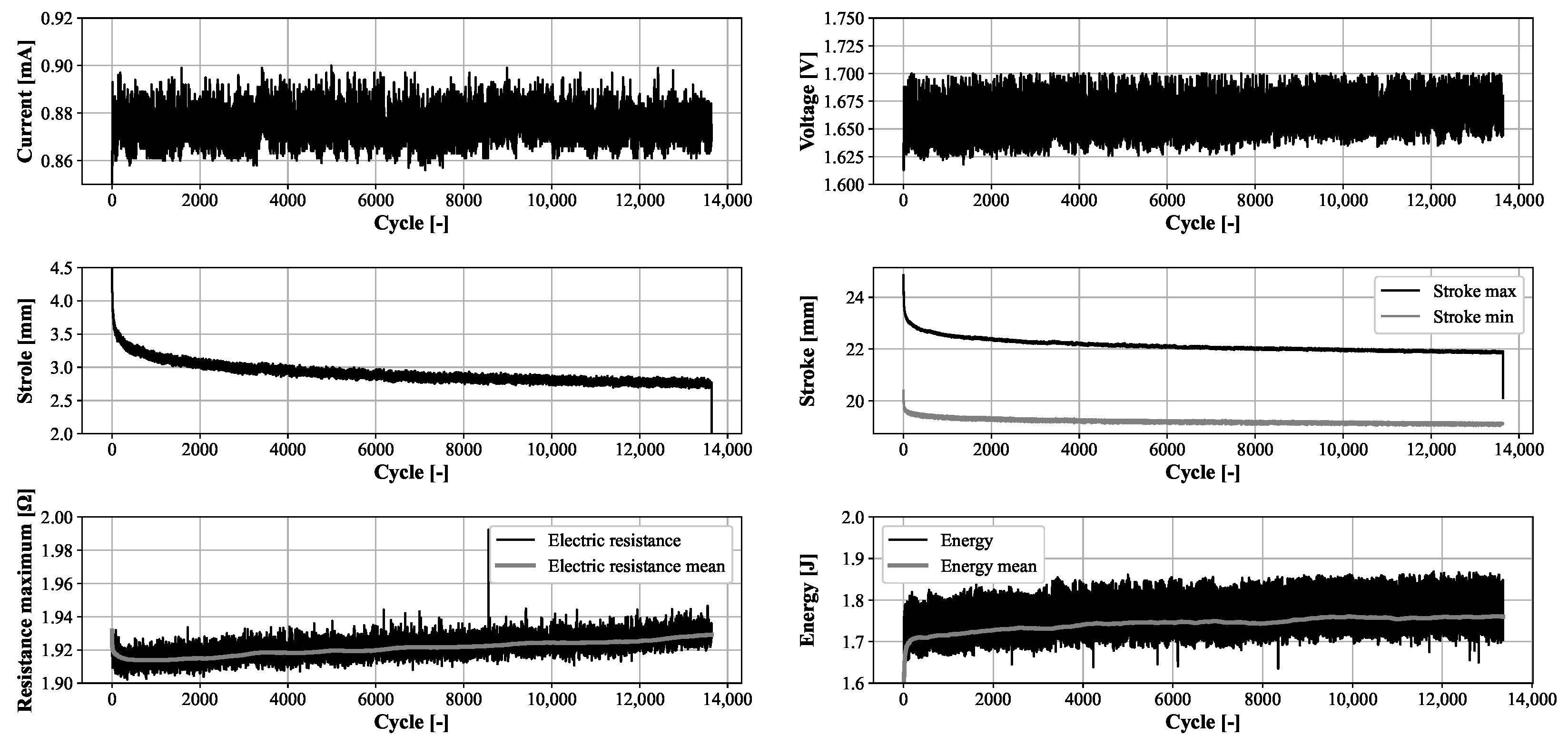
- The maximum stroke decreases over time different. The process depends on the load scenario.
- The electric resistance increases over time. It also depends on the load scenario.
2. Goal of Research Work/Motivation
3. Experimental Setups
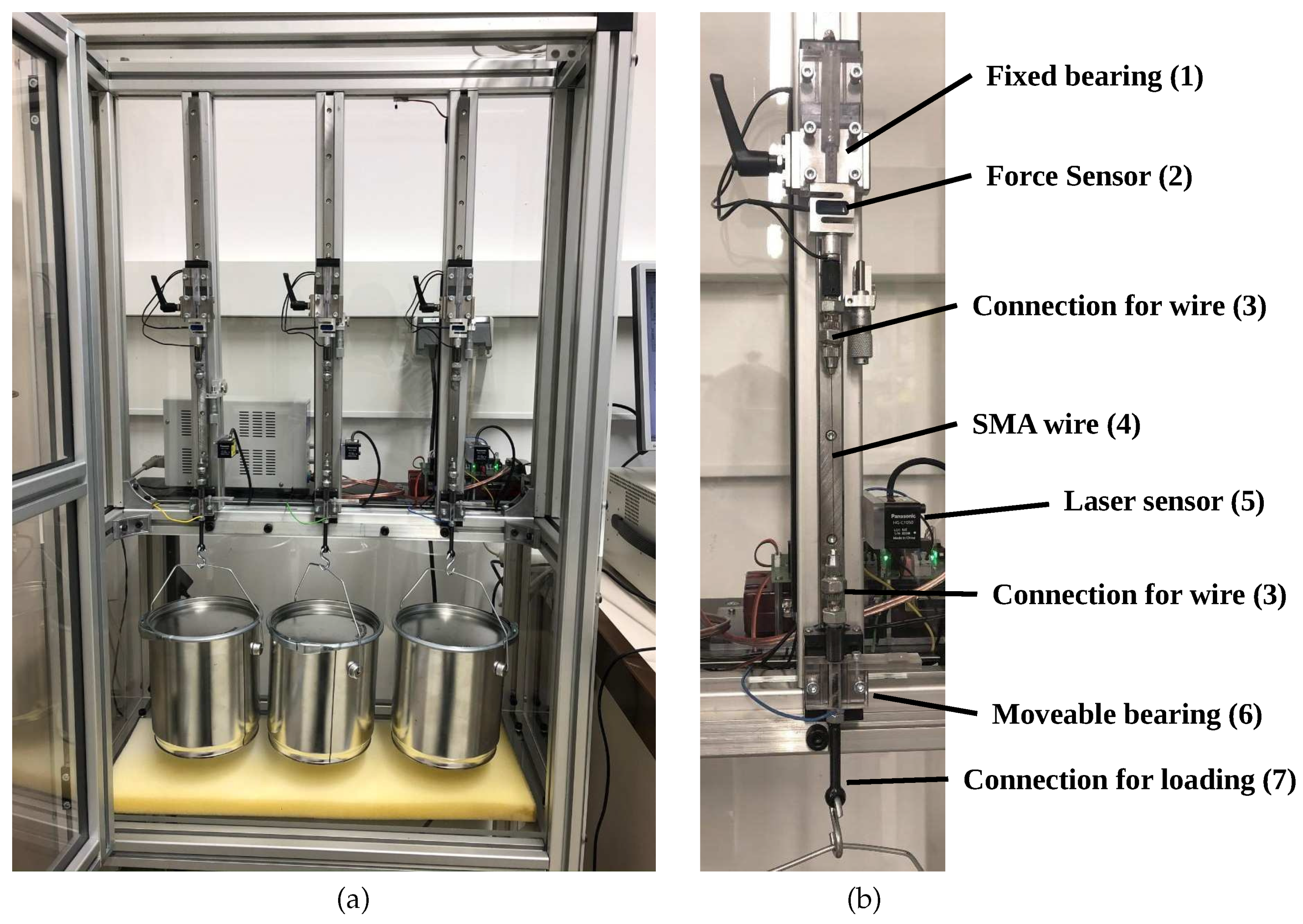
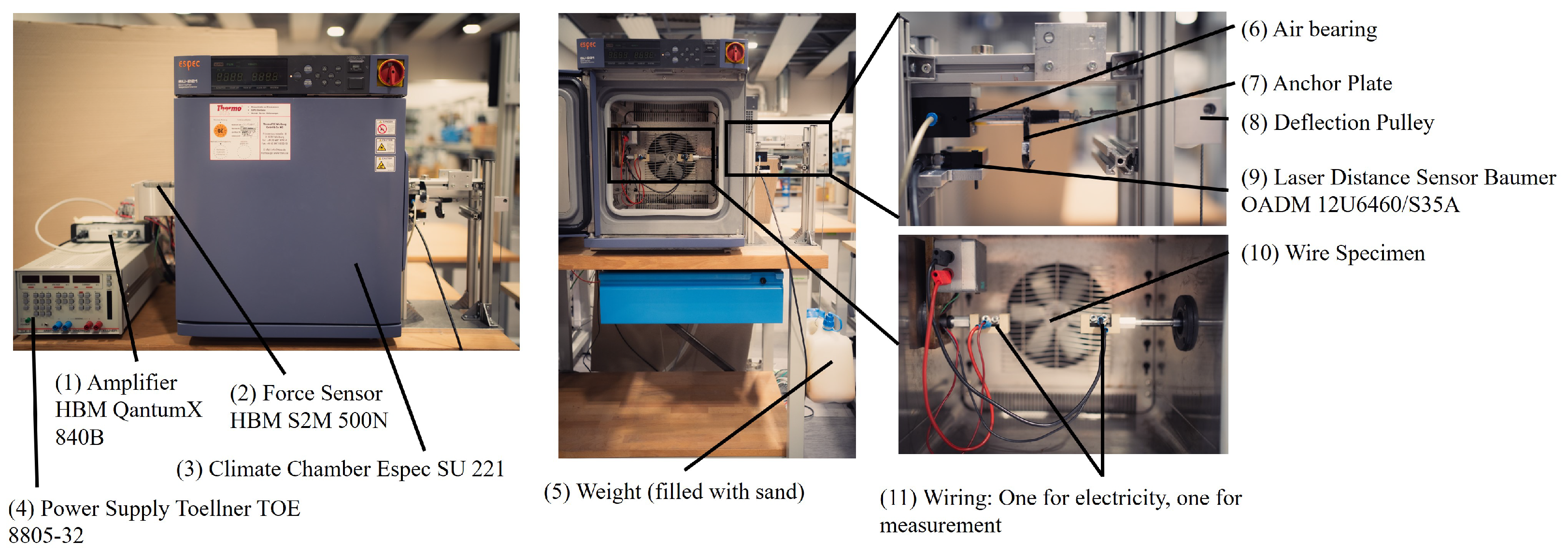
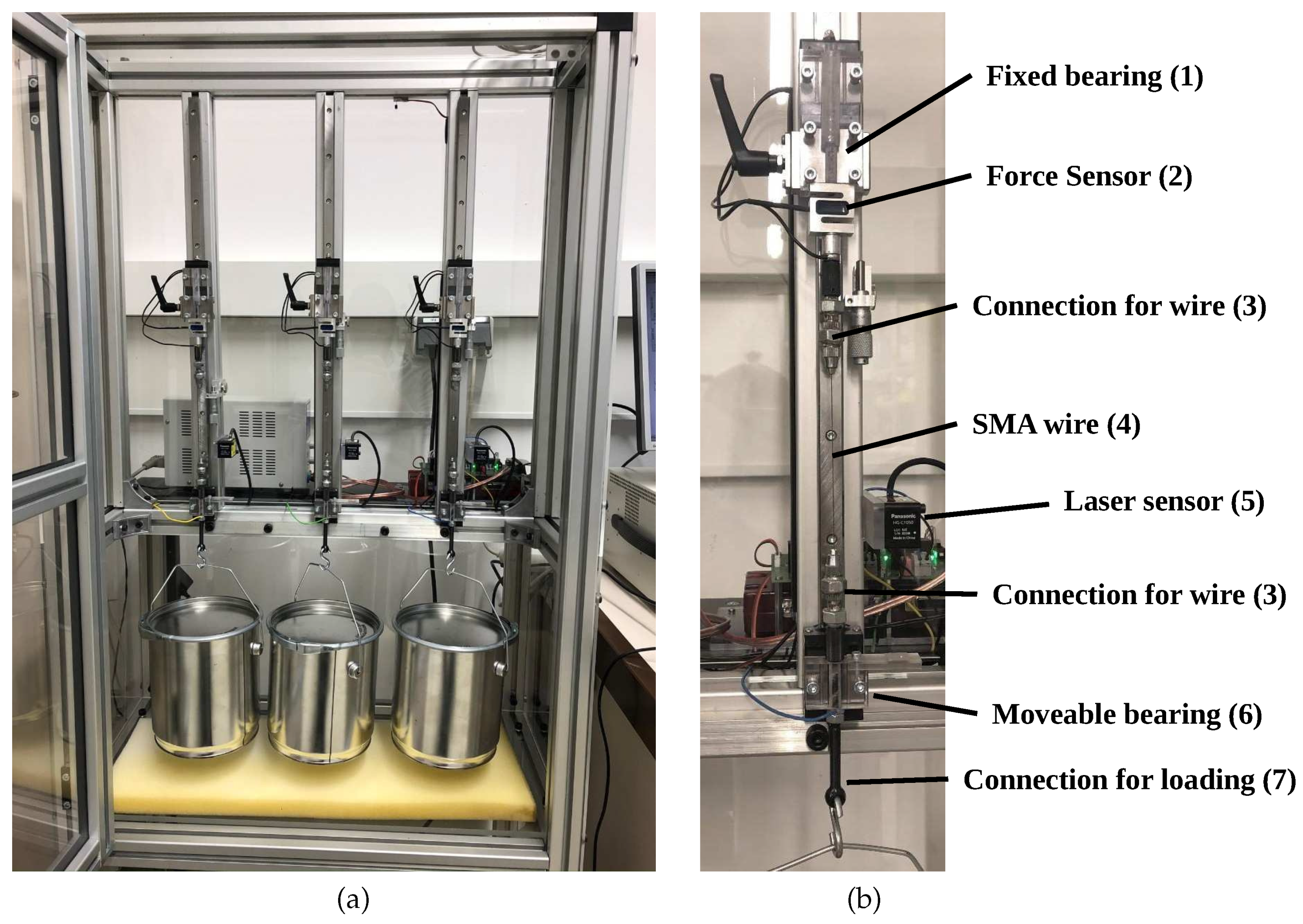
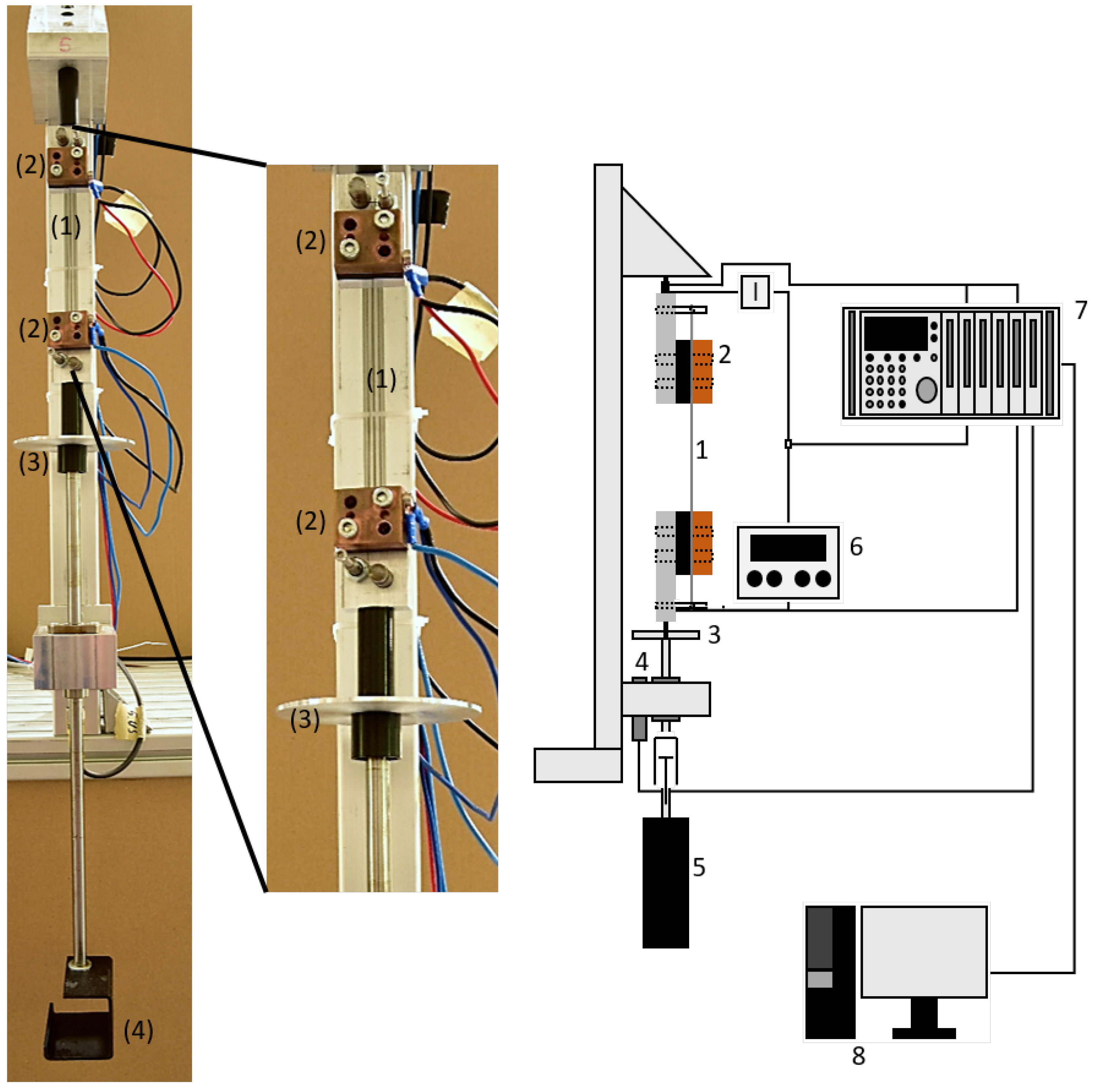
3.1. Experimental Setup for Fatigue Tests
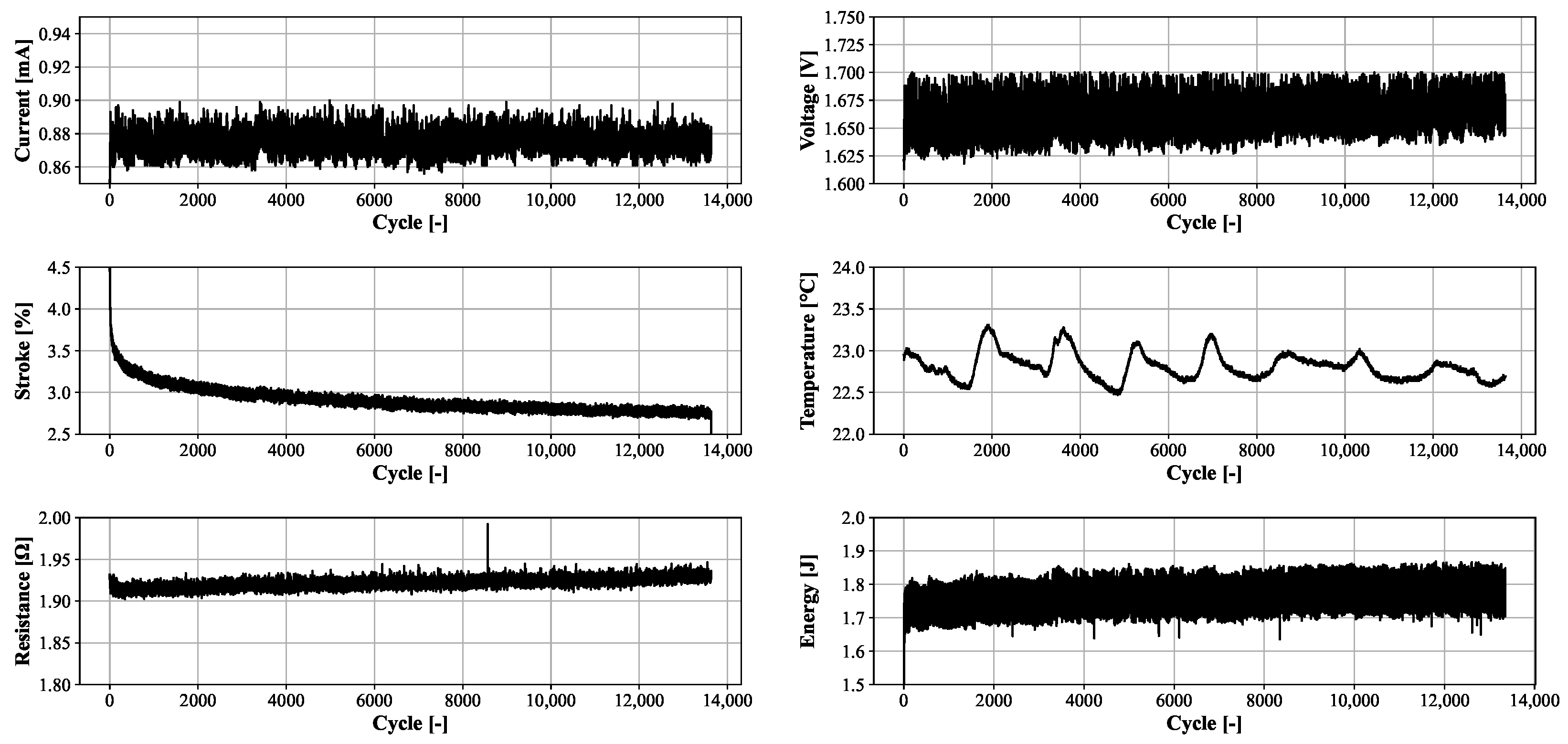
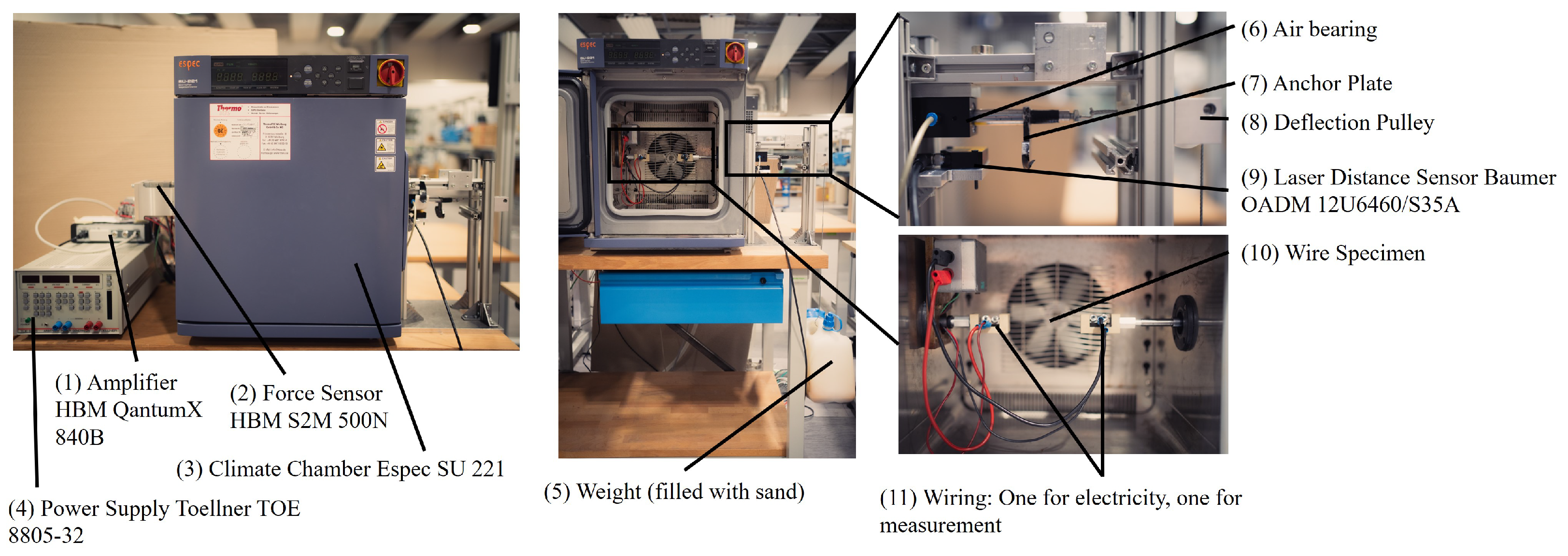
3.2. Experimental Setup for Climate Tests
4. Model Setup of the Simulation and Plausibility Analysis
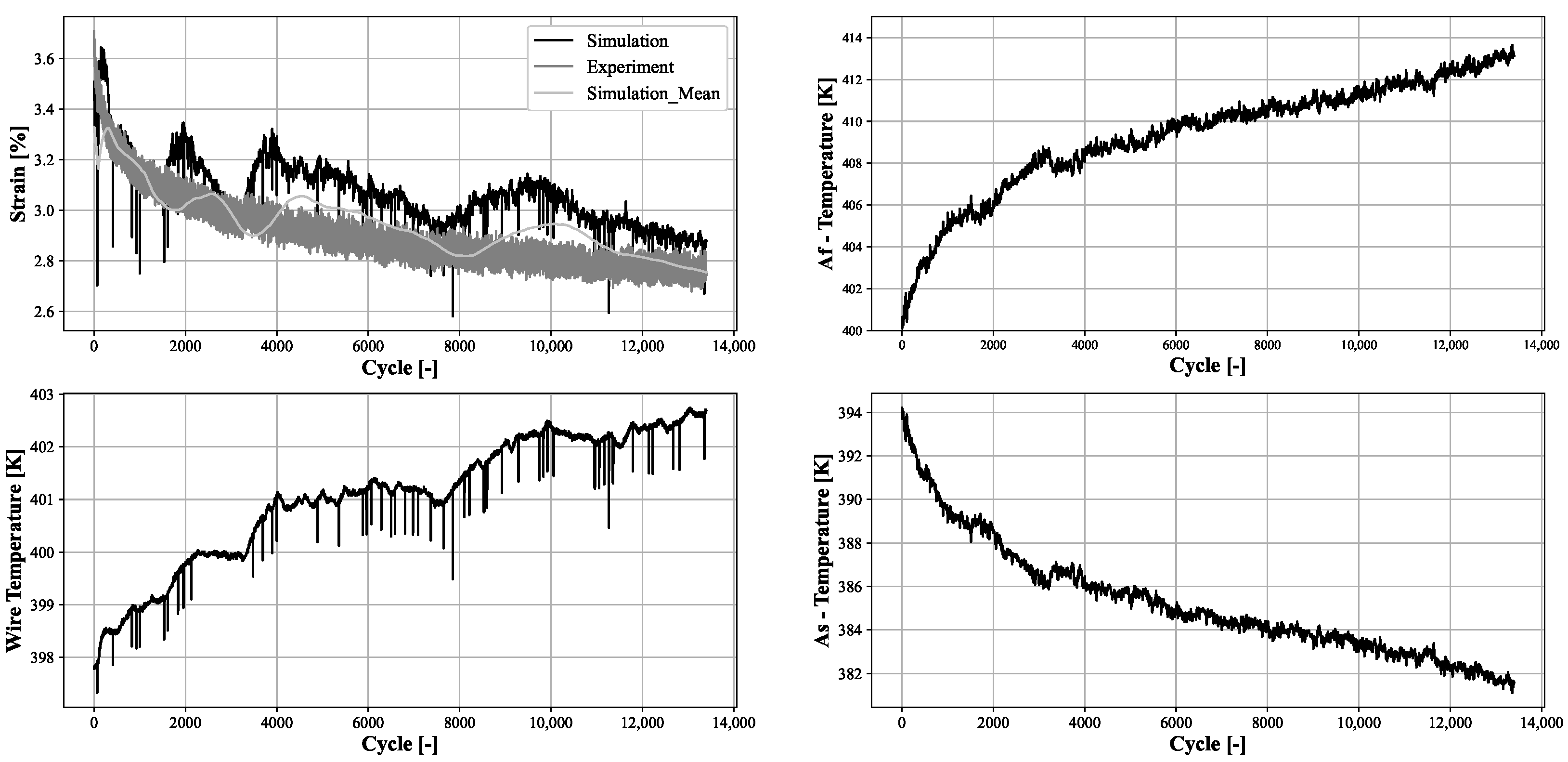
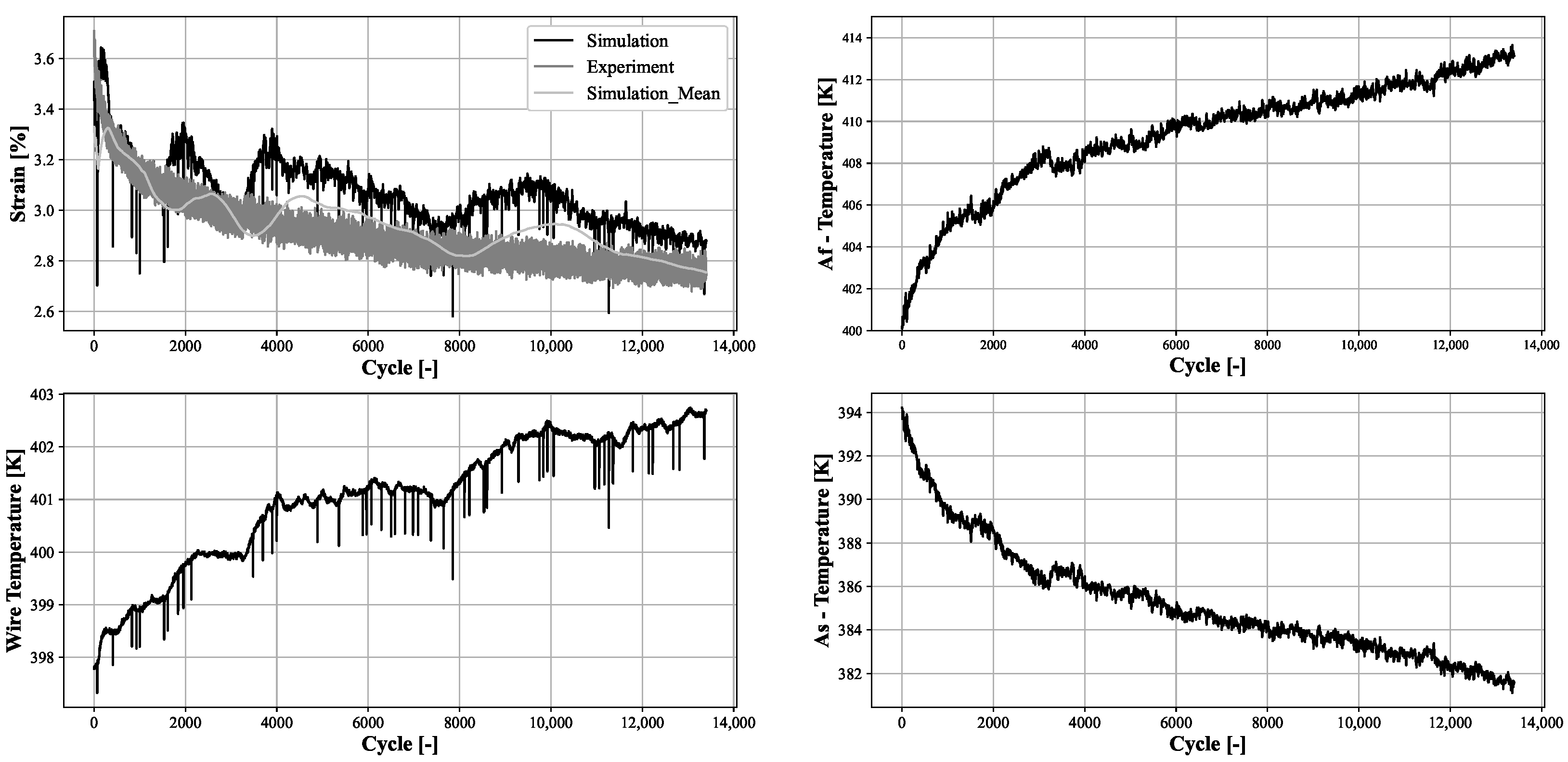
- The predicted stroke decreases
- The maximum wire temperature increases since the energy increases
- should increase proportionally to the electric resistance
- should decrease proportionally to the electric resistance
5. Development of the Target Models
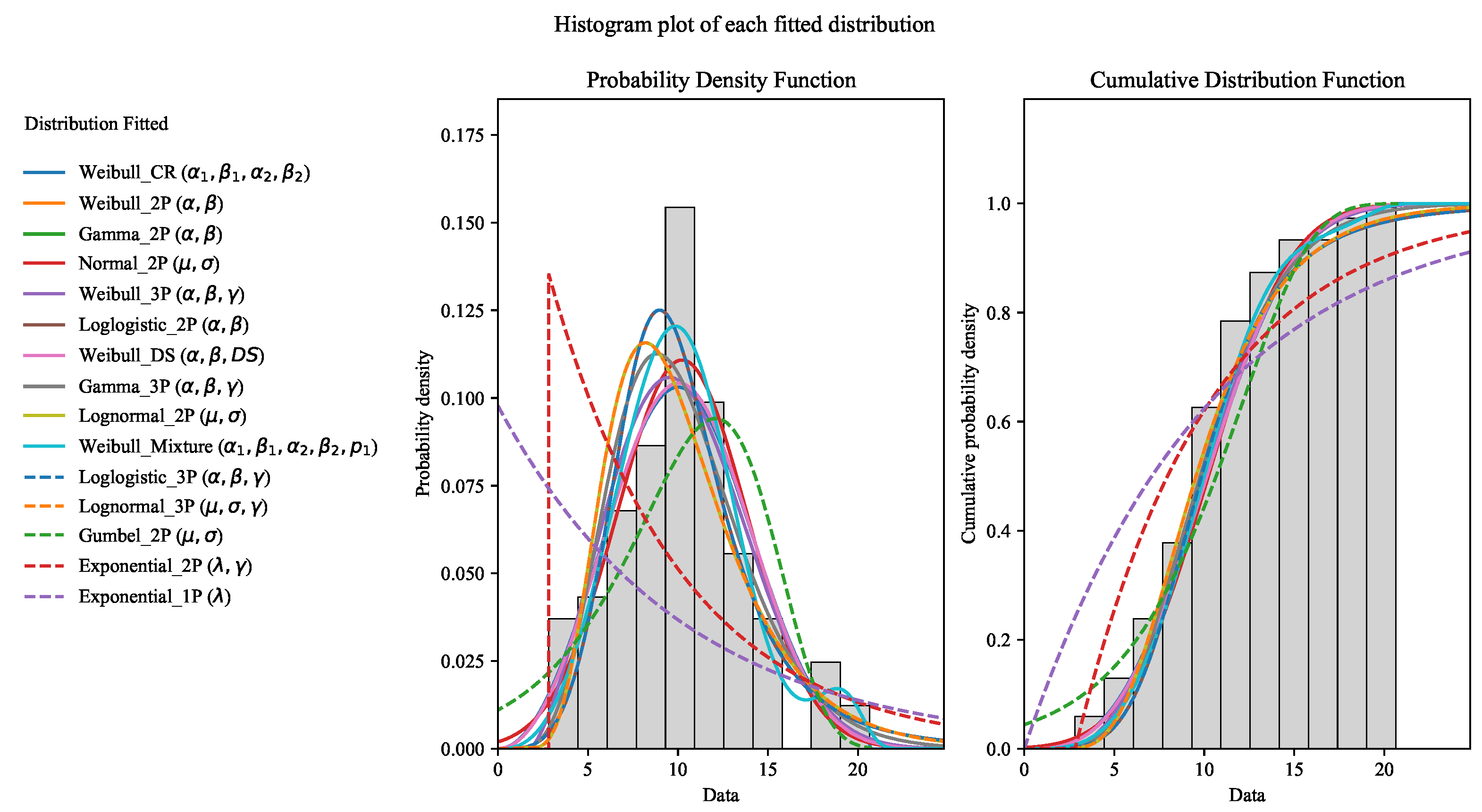
5.1. Distributions
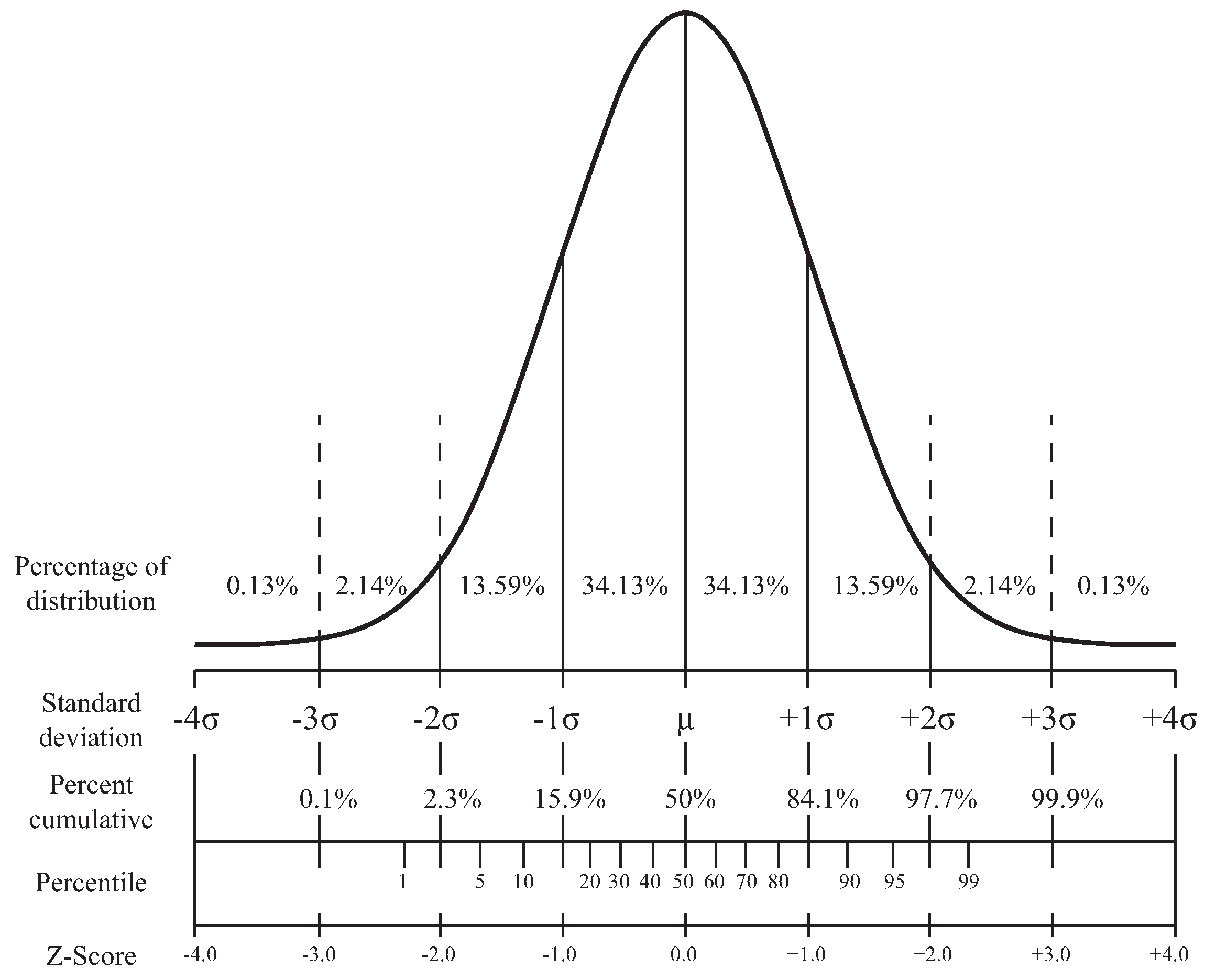
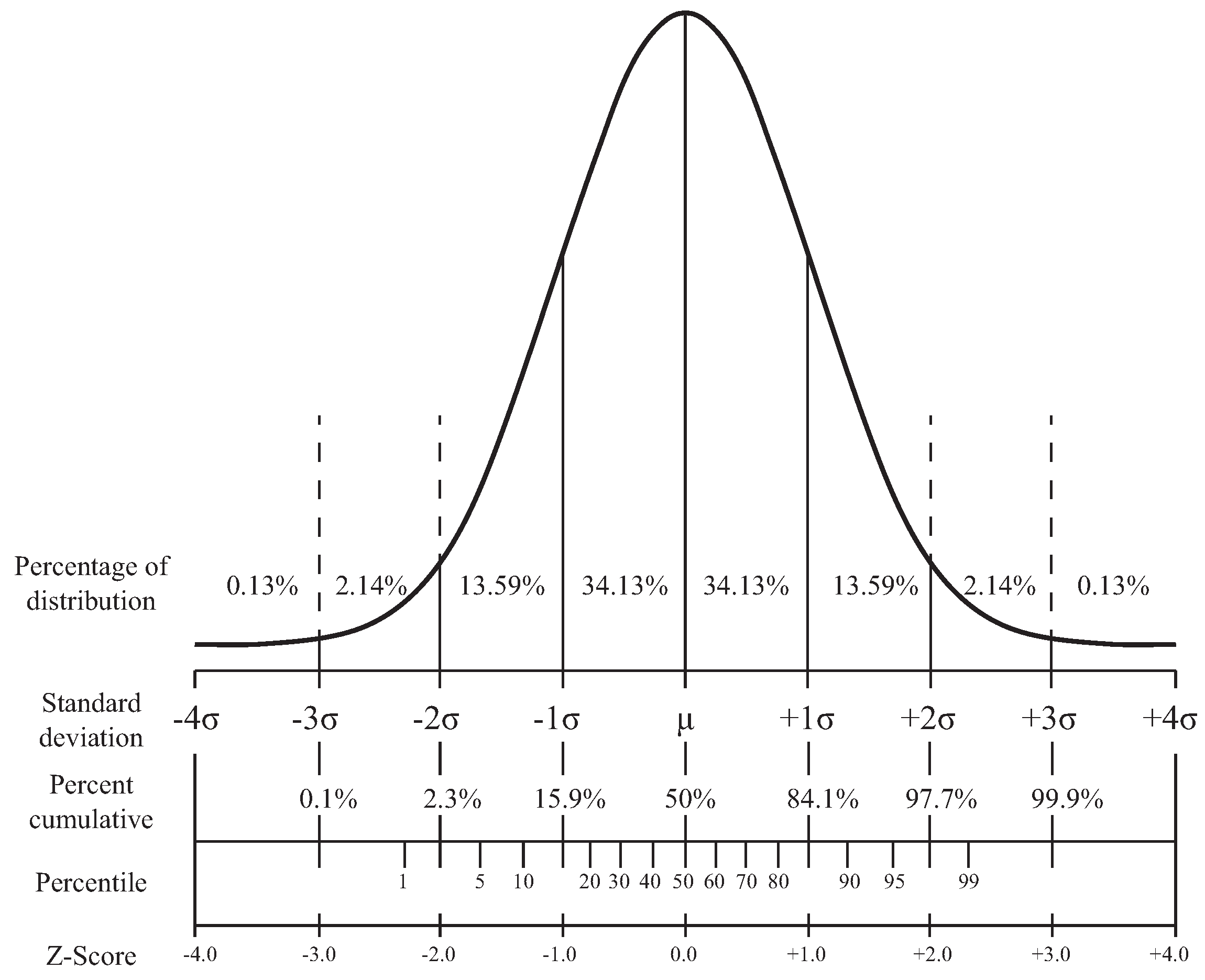
5.1.1. Normal Distribution
5.1.2. Lognormal Distribution
5.1.3. Exponential Distribution
5.1.4. Weibull Distribution
5.1.5. Gumbel Distribution
5.2. Goodness of Fit Tests
5.3. Approach for the Target Model
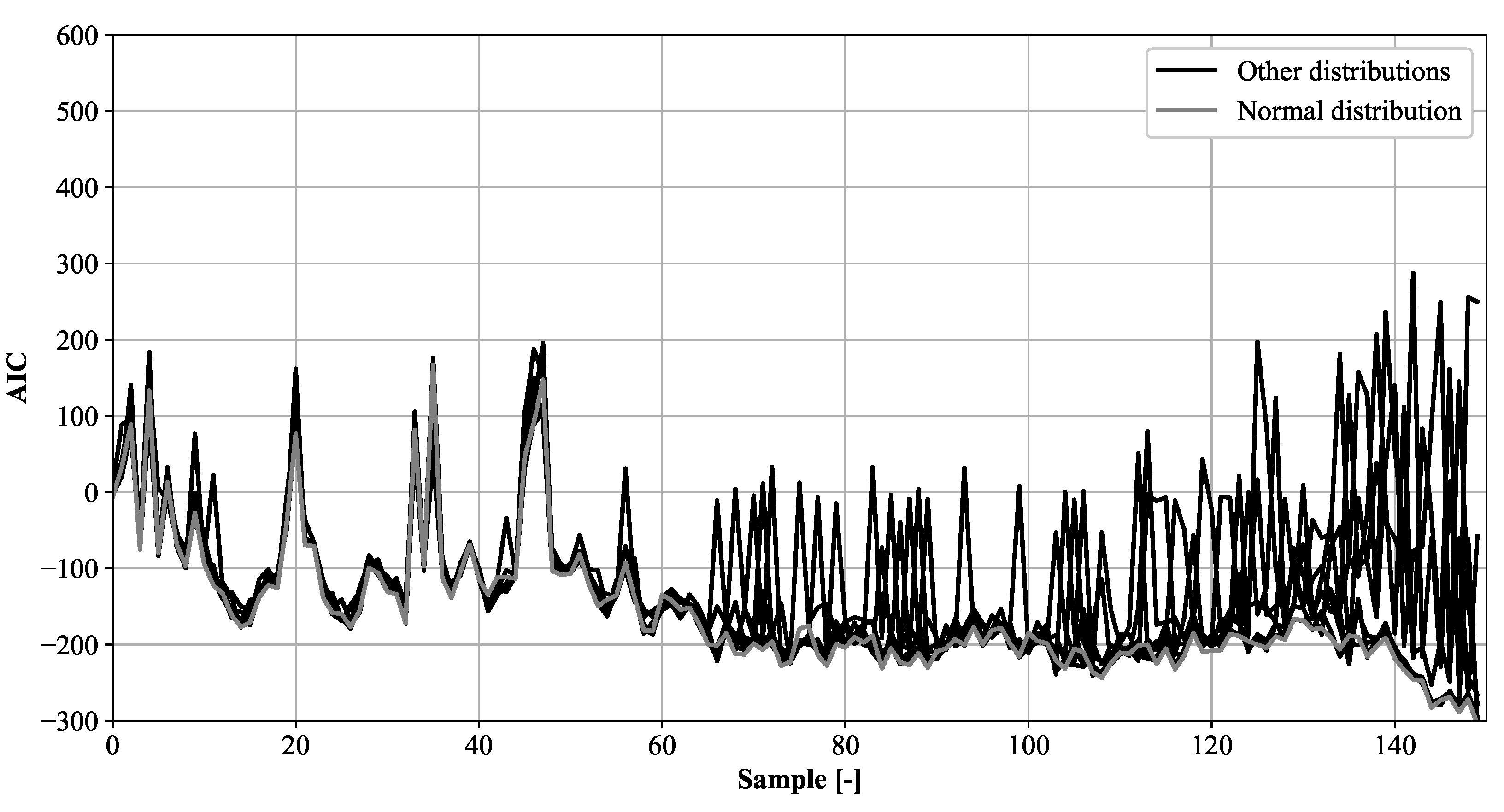
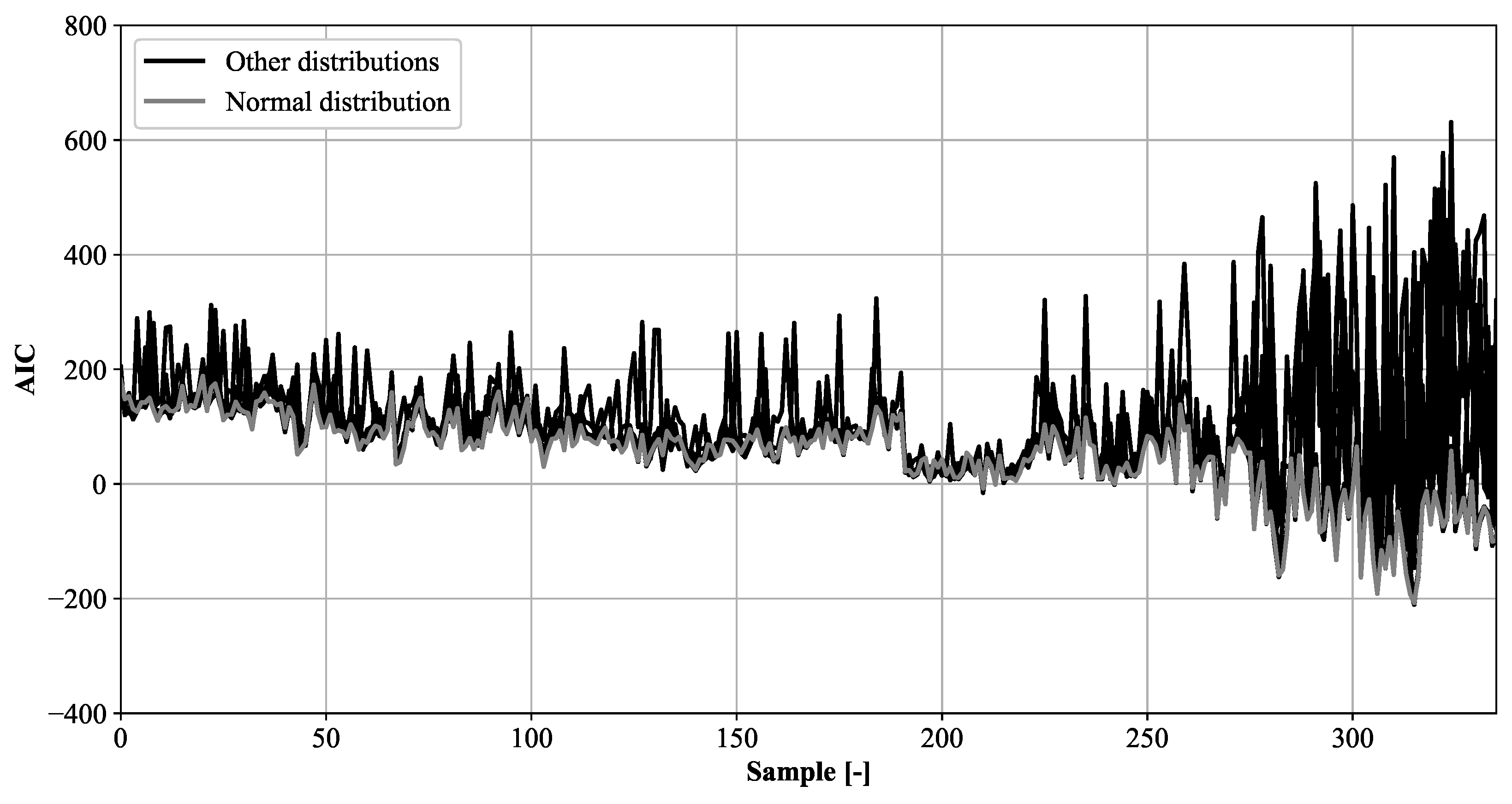
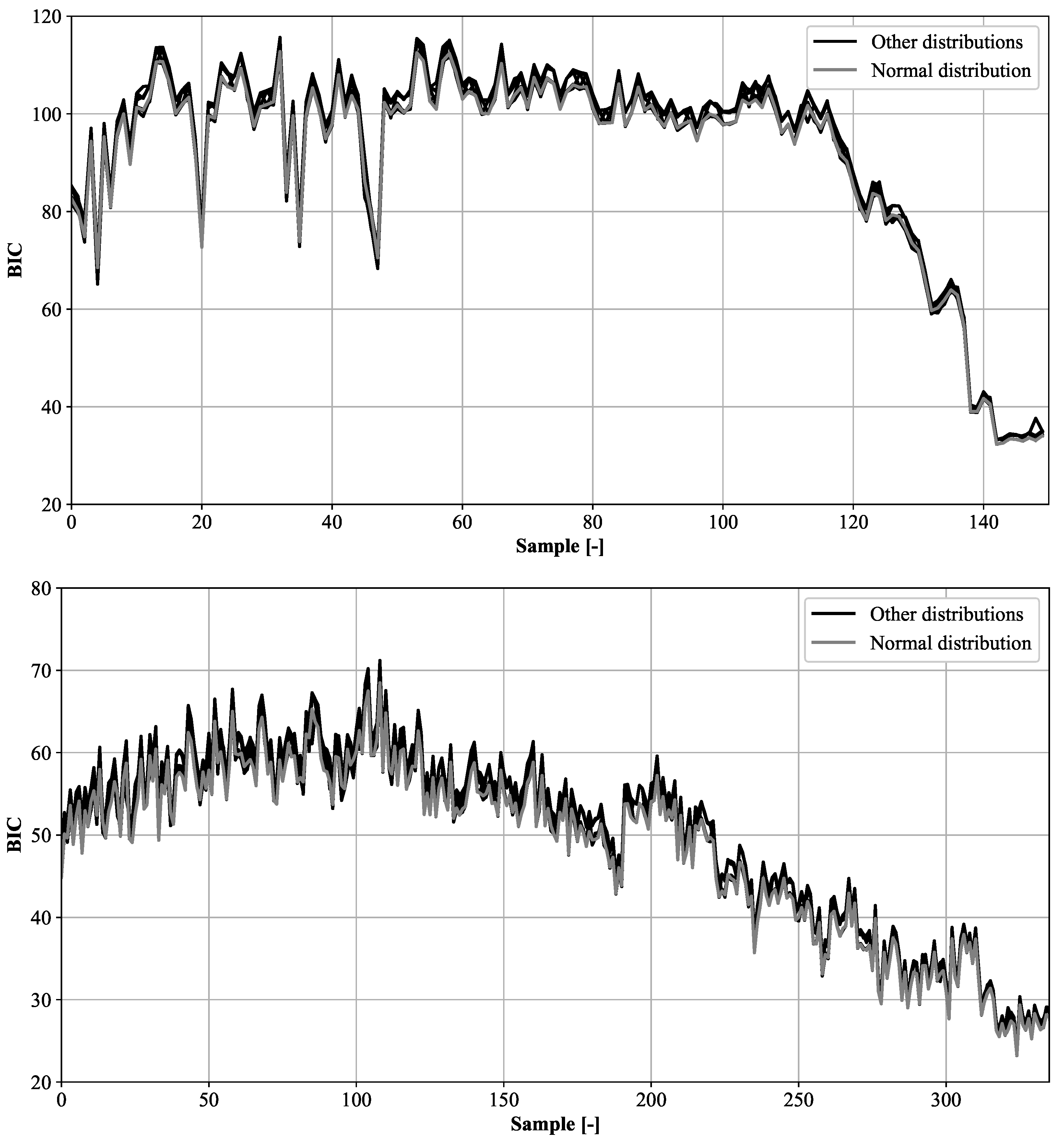
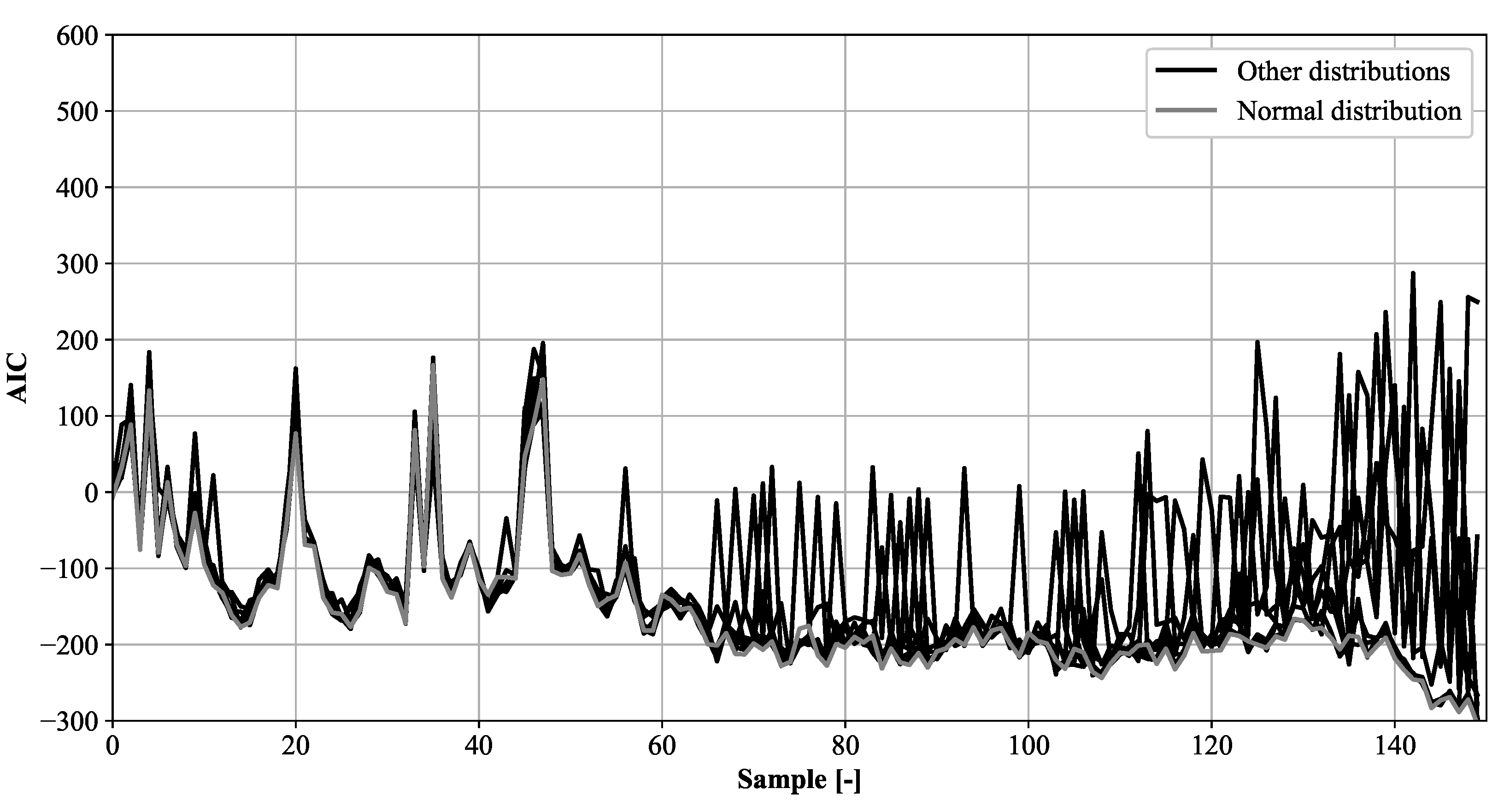
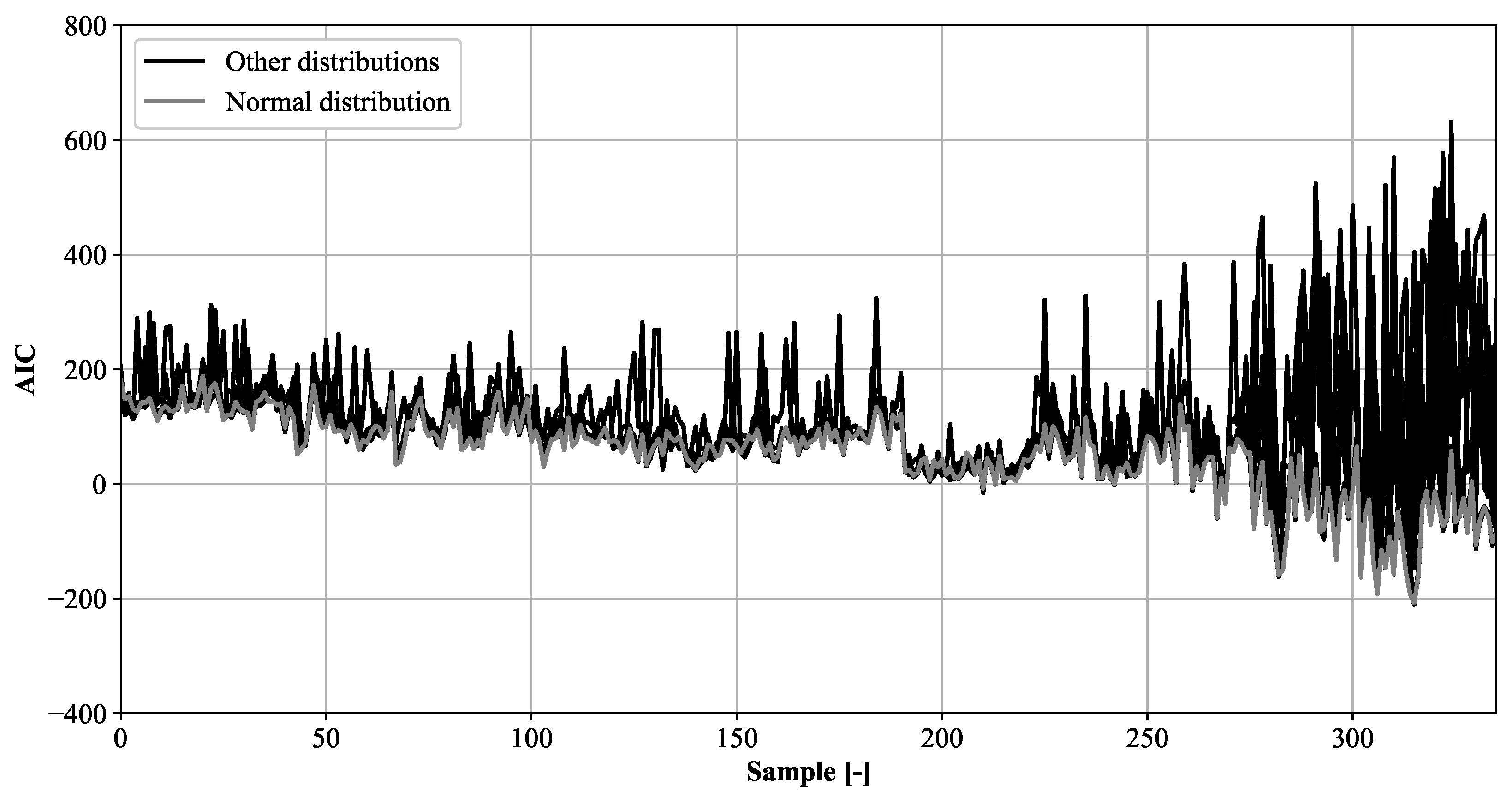
- Calculation of AIC- and BIC-values to determine the appropriate distribution
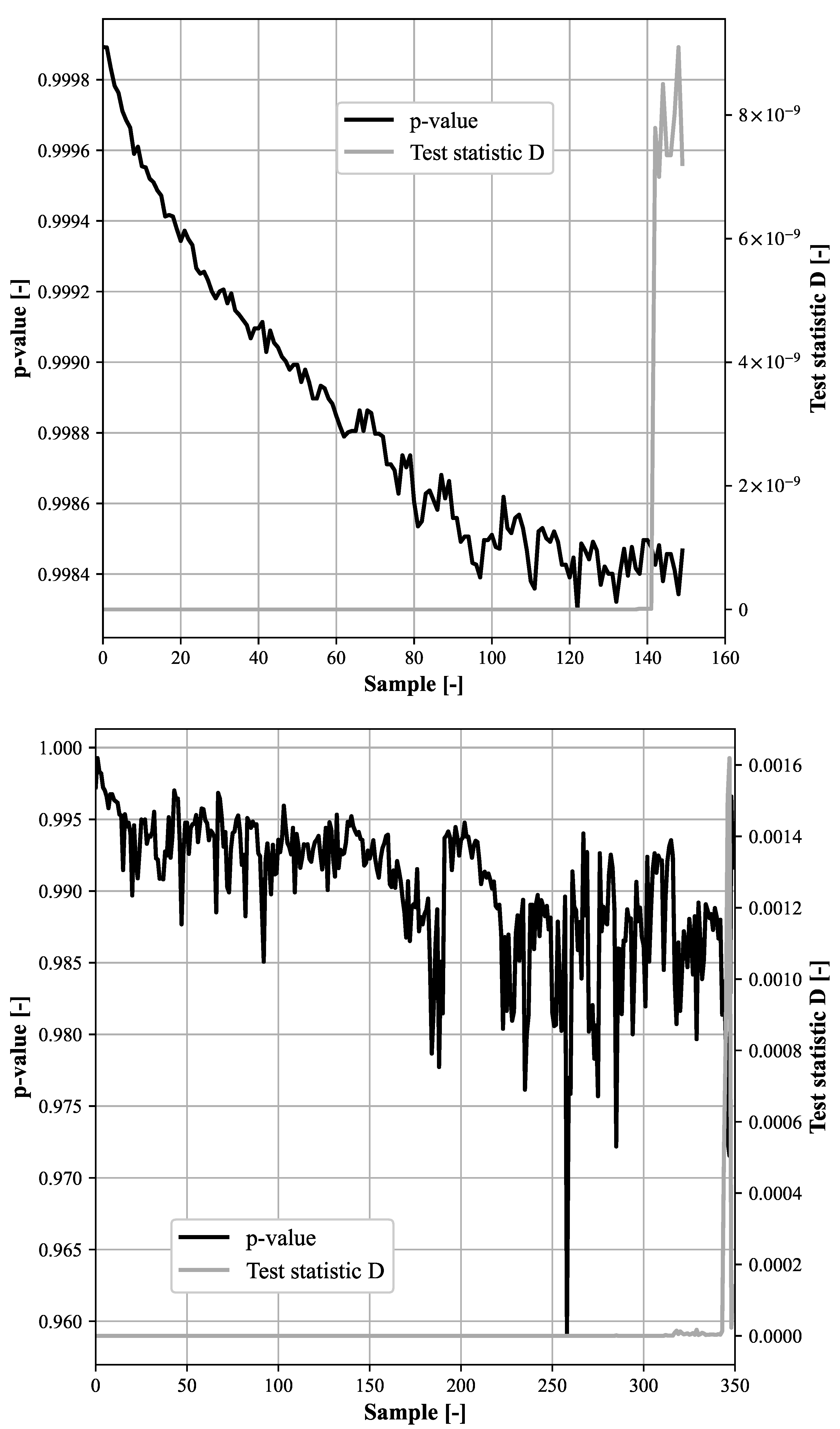
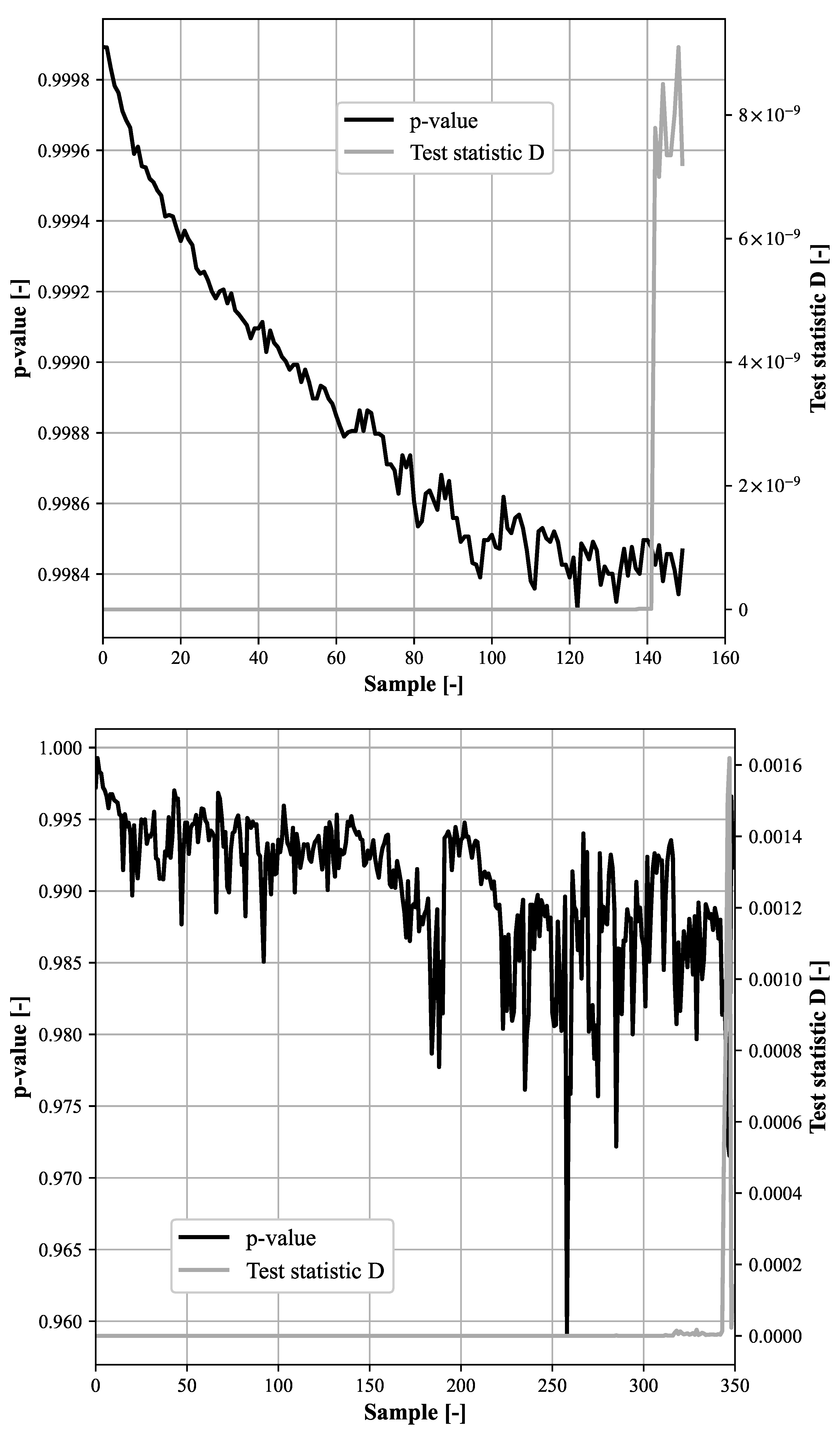
- Performing a KS-test to approve the fit of the distribution
- Fitting each sample to the distribution
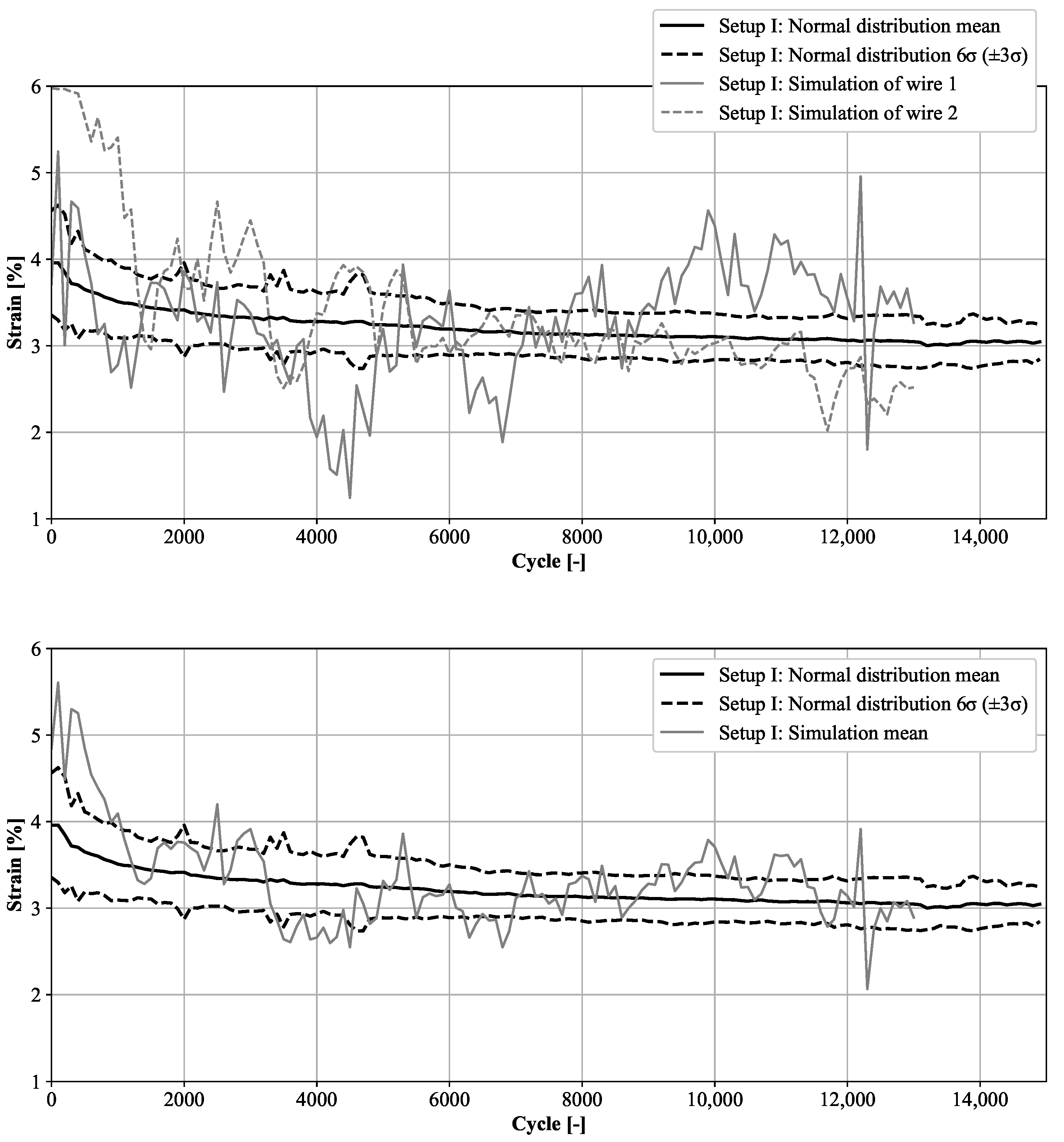
- Determining the standard deviation () for each sample (Figure 13)
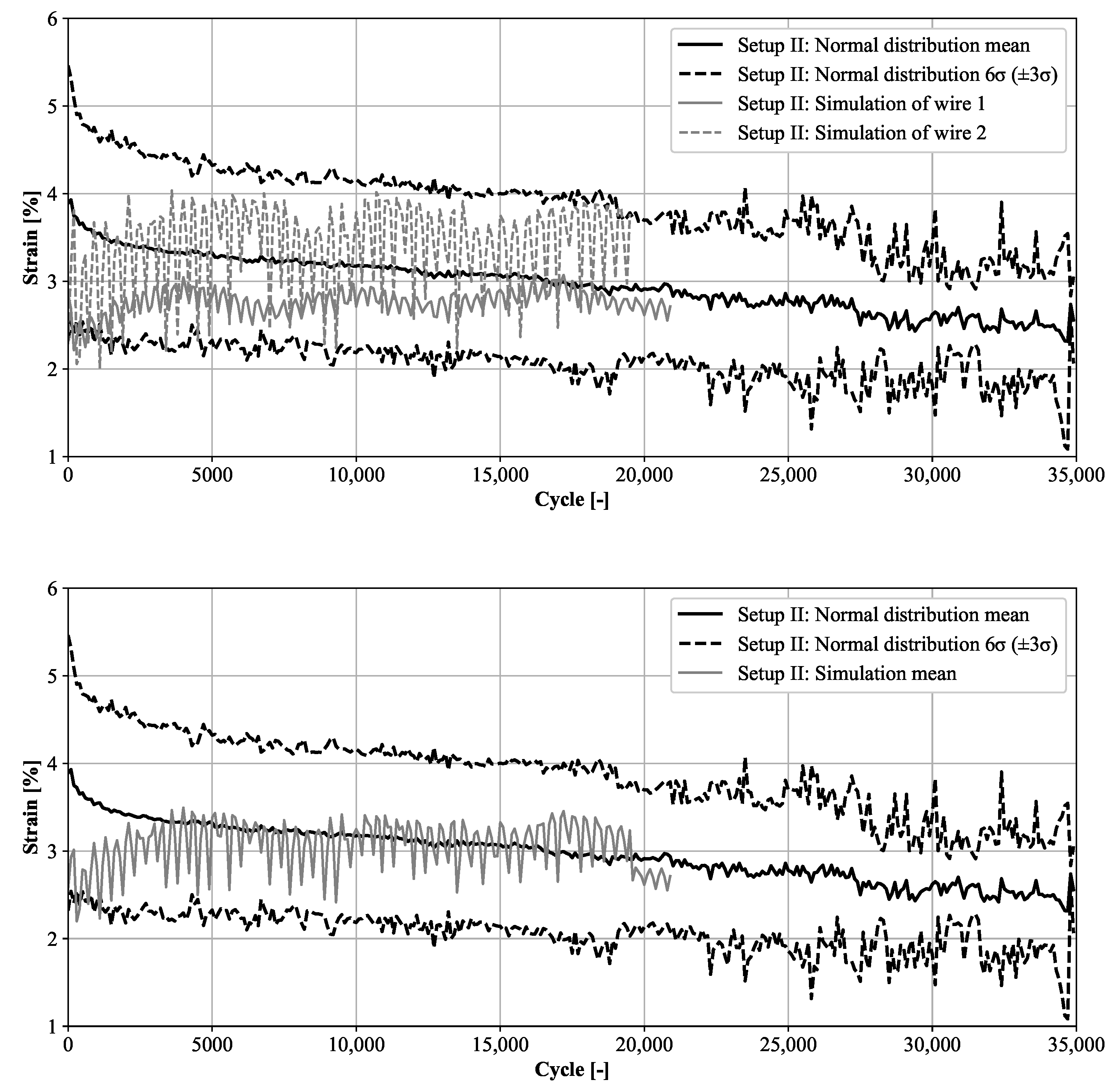
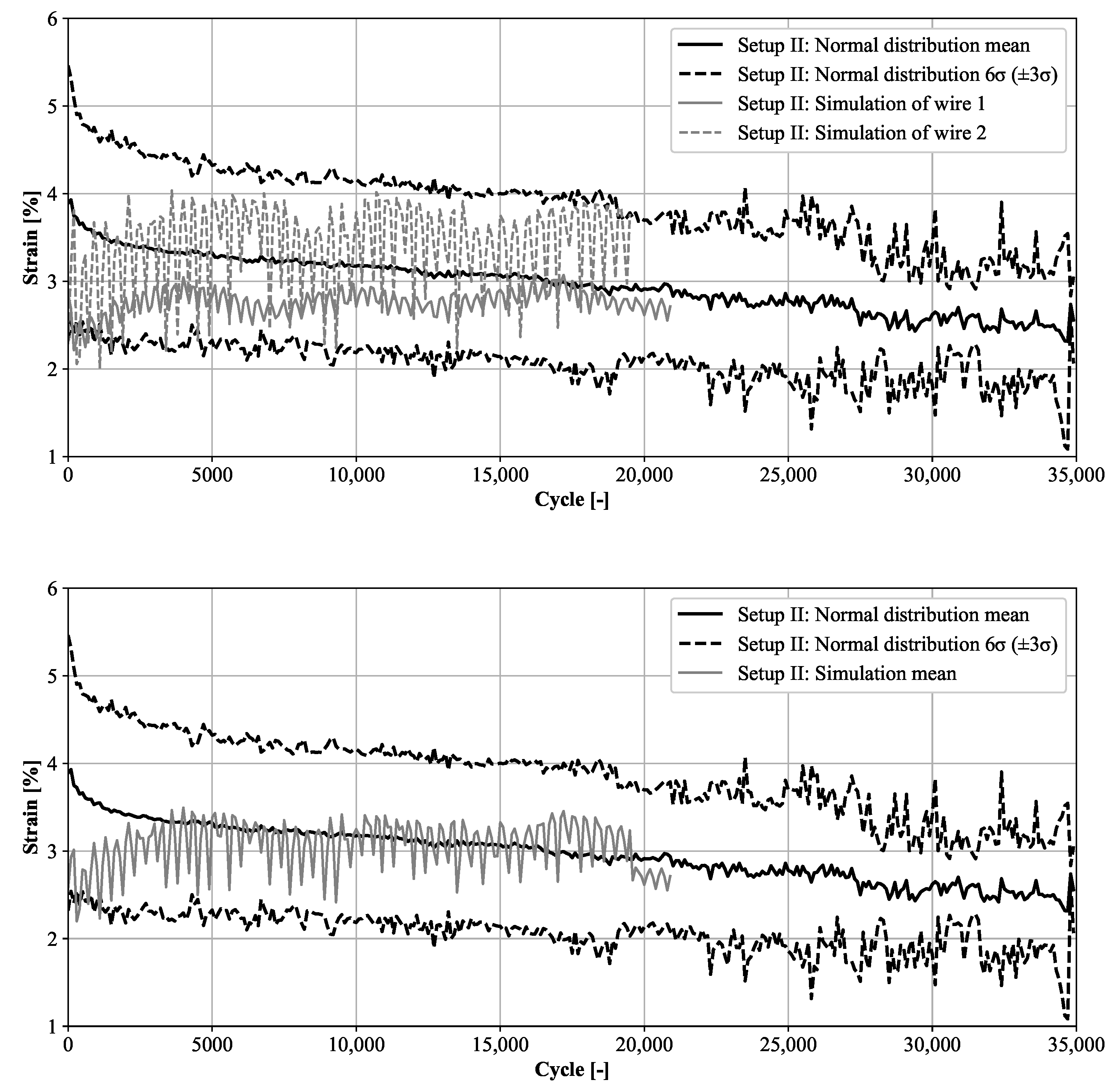
5.4. Final Target Model
6. Verification of the Simulation Model
6.1. Measuring Equipment
6.2. Convection
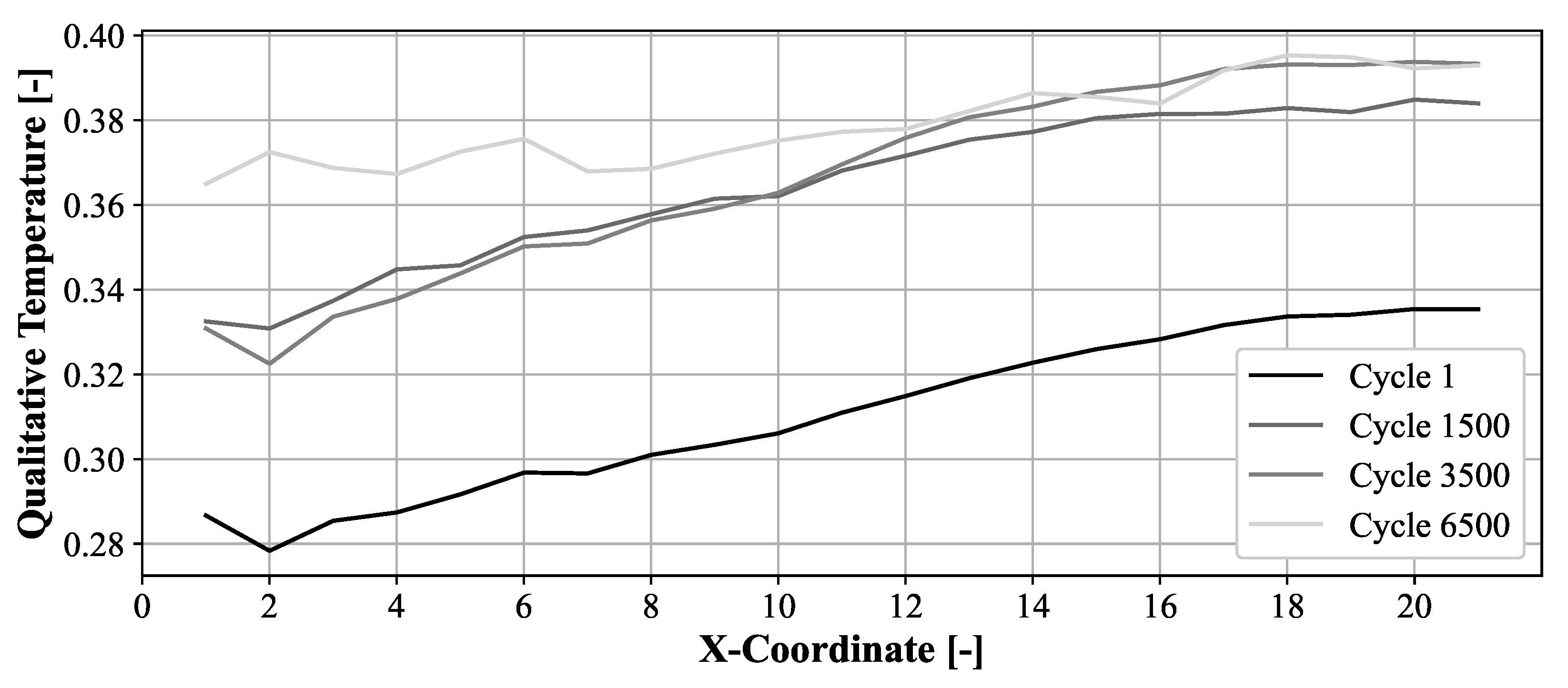
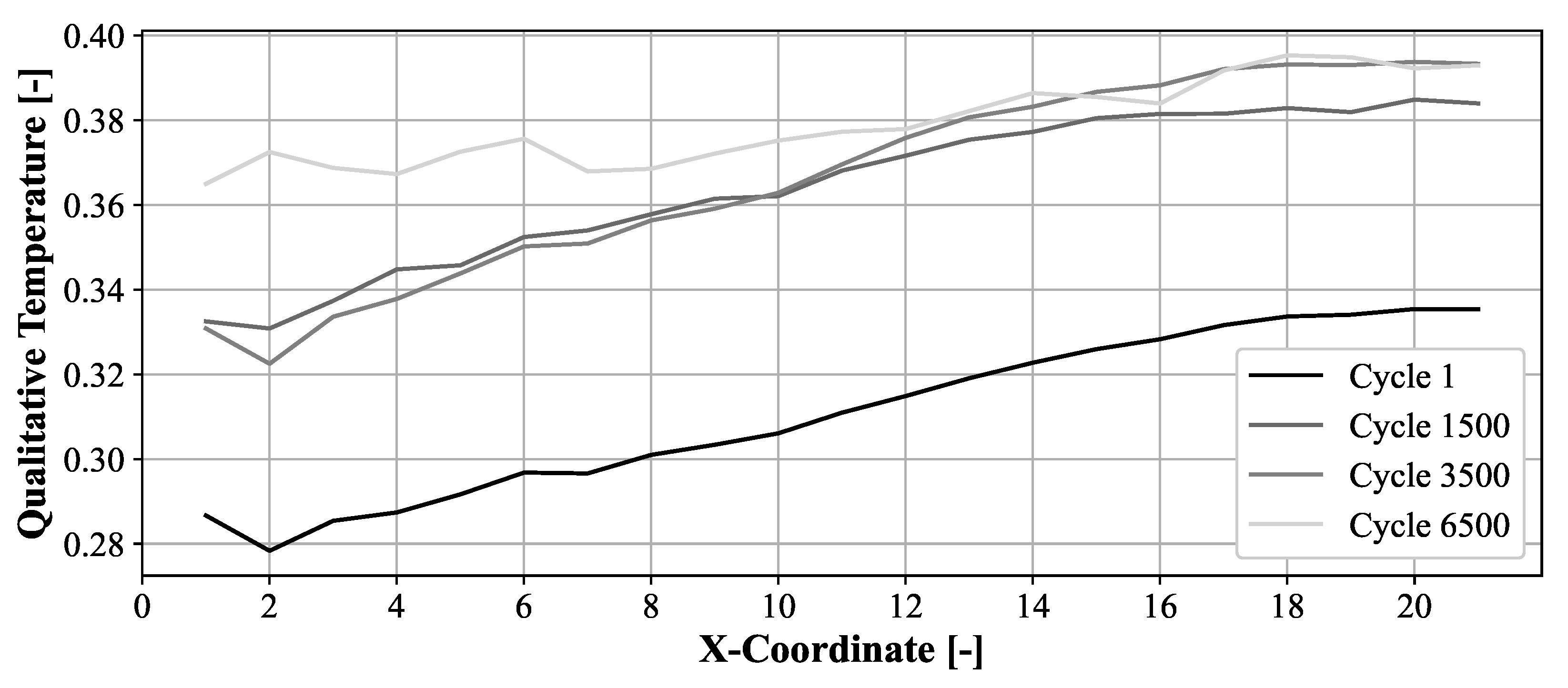
6.3. Temperature Distribution
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations and Nomenclature
Abbreviations
| AIC | Akaike information criterion |
| BIC | Bayesian information criterion |
| H | Hysteresis |
| PTT | Phase transformation temperature |
| SMA | Shape memory alloy |
| SME | Shape memory effect |
Nomenclature
| Shape memory effect | |
| Austenite start temperature [°C] | |
| Austenite finish temperature [°C] | |
| Martensite start temperature [°C] | |
| Martensite finish temperature [°C] | |
| PTT | Phase transformation temperature [°C] |
| General parameters | |
| t | Time [s] |
| p | Density [] |
| V | Volume [m] |
| F | Surface [m] |
| T | Temperature [K] and [°C] |
| Stress [MPa] | |
| W | Work [J] |
| Electrical parameters | |
| I | Electrical current [A] |
| U | Electrical voltage [V] |
| R | Electrical resistance [] |
| Parameters of the model | |
| Martensite fraction [-] | |
| Specific transformation enthalpy [] | |
| Emissivity [-] | |
| Heat transfer coefficient [] | |
| Specific heat capacity [] | |
| Q | Heat (energy) transfer [W] |
Appendix A. Additional Plots
References
- Otsuka, K. (Ed.) Shape Memory Materials, 1st ed.; Cambridge University Press: Cambridge, UK, 1998. [Google Scholar]
- Lagoudas, D.C. Shape Memory Alloys: Modeling and Engineering Applications; Springer: Boston, MA, USA, 2008. [Google Scholar] [CrossRef]
- Lexcellent, C. Shape Memory Alloys Handbook; Materials Science Series; ISTE: London, UK, 2013. [Google Scholar]
- Rao, A.; Srinivasa, A.R.; Reddy, J.N. Design of Shape Memory Alloy (SMA) Actuators; Springer Briefs in Applied Sciences and Technology; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar] [CrossRef]
- Gümpel, P.; Gläser, S.; Jost, N.; Mertmann, M.; Seitz, N.; Strittmatter, J. Formgedächtnislegierungen: Einsatzmöglichkeiten in Maschinenbau, Medizintechnik und Aktuatorik, 2nd ed.; Volume Band 655; Kontakt & Studium Expert Verlag: Renningen, Germany, 2018. [Google Scholar]
- Janocha, H. (Ed.) Adaptronics and Smart Structures: Basics, Materials, Design, and Applications; with 17 Tables, 2nd ed.; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Mohd Jani, J.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. (1980–2015) 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Stöckel, D. Legierungen mit Formgedächtnis: Industrielle Nutzung d. Shape-Memory-Effektes; Grundlagen, Werkstoffe, Anwendungen; Volume 259 Werkstoffe; Kontakt & Studium, Expert-Verl.: Ehningen bei Böblingen, Germany, 1988. [Google Scholar]
- Lygin, K. Eine Methodik zur Entwicklung von Umgebungsaktivierten FG-Aktoren Mit Geringer Thermischer Hysterese am Beispiel der Heizungs- und Klimatechnik. Ph.D. Thesis, Ruhr-Universität Bochum, Bochum, Germany, 2014. [Google Scholar]
- Schiedeck, F. Entwicklung Eines Modells für Formgedächtnisaktoren im Geregelten Dynamischen Betrieb. Ph.D. Thesis, PZH Produktionstechnisches Zentrum Hannover, Garbsen, Germany, 2009. [Google Scholar]
- Stoeckel, D. Shape memory actuators for automotive applications. Mater. Des. (1980–2015) 1990, 11, 302–307. [Google Scholar] [CrossRef]
- Otibar, D.; Weirich, A.; Kortenjann, M.; Kuhlenkötter, B. A Preliminary Investigation of Temperature Dependency of a Shape Memory Actuator with Time-Based Control in Aircraft Interiors. IOP Conf. Ser. Mater. Sci. Eng. 2017, 216, 012009. [Google Scholar] [CrossRef] [Green Version]
- Kuhlenkötter, W. Applicability of Shape Memory Alloys in Aircraft Interiors. Actuators 2019, 8, 61. [Google Scholar] [CrossRef] [Green Version]
- Barbarino, S.; Saavedra Flores, E.I.; Ajaj, R.M.; Dayyani, I.; Friswell, M.I. A review on shape memory alloys with applications to morphing aircraft. Smart Mater. Struct. 2014, 23, 063001. [Google Scholar] [CrossRef]
- Costanza, G.; Tata, M.E. Shape Memory Alloys for Aerospace, Recent Developments, and New Applications: A Short Review. Materials 2020, 13, 1856. [Google Scholar] [CrossRef] [Green Version]
- Duerig, T.; Pelton, A.; Stöckel, D. An overview of nitinol medical applications. Mater. Sci. Eng. A 1999, 273–275, 149–160. [Google Scholar] [CrossRef]
- Jiang, S.; Chen, B.; Qi, F.; Cao, Y.; Ju, F.; Bai, D.; Wang, Y. A variable-stiffness continuum manipulators by an SMA-based sheath in minimally invasive surgery. Int. J. Med. Robot. Comput. Assist. Surg. MRCAS 2020, 16, e2081. [Google Scholar] [CrossRef]
- Spaggiari, A.; Castagnetti, D.; Golinelli, N.; Dragoni, E.; Scirè Mammano, G. Smart materials: Properties, design and mechatronic applications. J. Mater. Des. Appl. 2019, 233, 734–762. [Google Scholar] [CrossRef]
- Gopal, V.; Alphin, M.S.; Bharanidaran, R. Design of Compliant Mechanism Microgripper Utilizing the Hoekens Straight Line Mechanism. J. Test. Eval. 2021, 49, 20190091. [Google Scholar] [CrossRef]
- Jeong, J.; Yasir, I.B.; Han, J.; Park, C.H.; Bok, S.K.; Kyung, K.U. Design of Shape Memory Alloy-Based Soft Wearable Robot for Assisting Wrist Motion. Appl. Sci. 2019, 9, 4025. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Hao, L.; Zhang, W.; Zhao, Z. A novel design of shape-memory alloy-based soft robotic gripper with variable stiffness. Int. J. Adv. Robot. Syst. 2020, 17, 172988142090781. [Google Scholar] [CrossRef]
- Manfredi, L.; Cuschieri, A. Design of a 2 DOFs Mini Hollow Joint Actuated with SMA Wires. Materials 2018, 11, 2014. [Google Scholar] [CrossRef] [Green Version]
- Motzki, P.; Seelecke, S.; Rizzello, G. A Shape Memory Alloy Smart Handling System for Advanced Manufacturing Applications. In Proceedings of the 2020 7th International Conference on Control, Decision and Information Technologies (CoDIT), Prague, Czech Republic, 29 June–2 July 2020; pp. 229–234. [Google Scholar] [CrossRef]
- Elahinia, M.; Shayesteh Moghaddam, N.; Taheri Andani, M.; Amerinatanzi, A.; Bimber, B.A.; Hamilton, R.F. Fabrication of NiTi through additive manufacturing: A review. Prog. Mater. Sci. 2016, 83, 630–663. [Google Scholar] [CrossRef] [Green Version]
- Haberland, C.; Elahinia, M.; Walker, J.M.; Meier, H.; Frenzel, J. On the development of high quality NiTi shape memory and pseudoelastic parts by additive manufacturing. Smart Mater. Struct. 2014, 23, 104002. [Google Scholar] [CrossRef]
- Nigito, E.; Diemer, F.; Husson, S.; Ou, S.F.; Tsai, M.H.; Rézaï-Aria, F. Microstructure of NiTi superelastic alloy manufactured by selective laser melting. Mater. Lett. 2022, 324, 132665. [Google Scholar] [CrossRef]
- Saedi, S.; Shayesteh Moghaddam, N.; Amerinatanzi, A.; Elahinia, M.; Karaca, H.E. On the effects of selective laser melting process parameters on microstructure and thermomechanical response of Ni-rich NiTi. Acta Mater. 2018, 144, 552–560. [Google Scholar] [CrossRef]
- Zeng, Z.; Cong, B.; Oliveira, J.P.; Ke, W.; Schell, N.; Peng, B.; Qi, Z.W.; Ge, F.; Zhang, W.; Ao, S.S. Wire and arc additive manufacturing of a Ni-rich NiTi shape memory alloy: Microstructure and mechanical properties. Addit. Manuf. 2020, 32, 101051. [Google Scholar] [CrossRef]
- Seelecke, S. Sensing Properties of SMA Actuators and Sensorless Control. In Shape Memory Alloy Valves; Czechowicz, A., Langbein, S., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 73–87. [Google Scholar] [CrossRef]
- Theren, B.; Heß, P.; Bracke, S.; Kuhlenkötter, B. Influence of the phase transformation behavior of NiTi shape memory alloy wires on the predictability of strain during operation. In Proceedings of the ASME 2022 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Detroit, MI, USA, 12–14 September 2022. [Google Scholar]
- Heß, P.; Bracke, S. An Approach to Predict the Lifetime of Shape Memory Actuators based on Accelerated Testing Measurements. In Proceedings of the 30th European Safety and Reliability Conference and 15th Probabilistic Safety Assessment and Management Conference, Venice, Italy, 1–5 November 2020; Baraldi, P., Di Maio, F., Zio, E., Eds.; Research Publishing Services: Singapore, 2020; pp. 1528–1535. [Google Scholar] [CrossRef]
- Heß, P.; Bracke, S. Zuverlässigkeitstechnik bei Formgedächtnisaktoren: Entwicklung von Prüfstandstechnik und Erprobungsprogramm. In Potenziale Künstlicher Intelligenz für die Qualitätswissenschaft: Bericht zur GQW-Jahrestagung 2018 in Nürnberg; Gesellschaft für Qualitätswissenschaft e.V., Ed.; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Heß, P.; Bracke, S. Reliability and degradation analysis of smart material actuators. In Proceedings of the 29th European Safety and Reliability Conference (ESREL 2019), Hannover, DE, USA, 22–26 September 2019; Beer, M., Zio, E., Eds.; Research Publishing Services: Singapore, 2019. [Google Scholar]
- Heß, P.; Bracke, S. Smart material actuators as a contributor for IoT-based smart applications and systems: Analyzing prototype and process measurement data of shape memory actuators for reliability and risk prognosis. J. Adv. Mech. Des. Syst. Manuf. 2020, 14, JAMDSM0026. [Google Scholar] [CrossRef] [Green Version]
- Heß, P.; Bracke, S. Estimation of the Remaining Lifetime of Shape Memory Alloy Actuators during Prototype Testing: Analysis of the Impact Of Different Currents. In Proceedings of the 31st European Safety and Reliability Conference (ESREL 2021), Angers, France, 19–23 September 2021; Castanier, B., Cepin, M., Bigaud, D., Berenguer, C., Eds.; Research Publishing Services: Singapore, 2021; pp. 3170–3177. [Google Scholar] [CrossRef]
- Kang, G.; Song, D. Review on structural fatigue of NiTi shape memory alloys: Pure mechanical and thermo-mechanical ones. Theor. Appl. Mech. Lett. 2015, 5, 245–254. [Google Scholar] [CrossRef] [Green Version]
- You, Y.; Zhang, Y.; Moumni, Z.; Anlas, G.; Zhang, W. Effect of the thermomechanical coupling on fatigue crack propagation in NiTi shape memory alloys. Mater. Sci. Eng. A 2017, 685, 50–56. [Google Scholar] [CrossRef]
- Rahim, M.; Frenzel, J.; Frotscher, M.; Pfetzing-Micklich, J.; Steegmüller, R.; Wohlschlögel, M.; Mughrabi, H.; Eggeler, G. Impurity levels and fatigue lives of pseudoelastic NiTi shape memory alloys. Acta Mater. 2013, 61, 3667–3686. [Google Scholar] [CrossRef]
- Robertson, S.W.; Pelton, A.R.; Ritchie, R.O. Mechanical fatigue and fracture of Nitinol. Int. Mater. Rev. 2012, 57, 1–37. [Google Scholar] [CrossRef]
- Robertson, S.W.; Launey, M.; Shelley, O.; Ong, I.; Vien, L.; Senthilnathan, K.; Saffari, P.; Schlegel, S.; Pelton, A.R. A statistical approach to understand the role of inclusions on the fatigue resistance of superelastic Nitinol wire and tubing. J. Mech. Behav. Biomed. Mater. 2015, 51, 119–131. [Google Scholar] [CrossRef]
- Zhang, J.; Somsen, C.; Simon, T.; Ding, X.; Hou, S.; Ren, S.; Ren, X.; Eggeler, G.; Otsuka, K.; Sun, J. Leaf-like dislocation substructures and the decrease of martensitic start temperatures: A new explanation for functional fatigue during thermally induced martensitic transformations in coarse-grained Ni-rich Ti–Ni shape memory alloys. Acta Mater. 2012, 60, 1999–2006. [Google Scholar] [CrossRef]
- Grossmann, C.; Frenzel, J.; Sampath, V.; Depka, T.; Eggeler, G. Elementary Transformation and Deformation Processes and the Cyclic Stability of NiTi and NiTiCu Shape Memory Spring Actuators. Metall. Mater. Trans. A 2009, 40, 2530–2544. [Google Scholar] [CrossRef]
- Auricchio, F.; Taylor, R.L.; Lubliner, J. Shape-memory alloys: Macromodelling and numerical simulations of the superelastic behavior. Comput. Methods Appl. Mech. Eng. 1997, 146, 281–312. [Google Scholar] [CrossRef]
- Bhattacharya, K.; Conti, S.; Zanzotto, G.; Zimmer, J. Crystal symmetry and the reversibility of martensitic transformations. Nature 2004, 428, 55–59. [Google Scholar] [CrossRef] [Green Version]
- Seelecke, S.; Muller, I. Shape memory alloy actuators in smart structures: Modeling and simulation. Appl. Mech. Rev. 2004, 57, 23–46. [Google Scholar] [CrossRef]
- Shaw, J.A. Simulations of localized thermo-mechanical behavior in a NiTi shape memory alloy. Int. J. Plast. 2000, 16, 541–562. [Google Scholar] [CrossRef]
- Xiao, Y.; Jiang, D. Thermomechanical modeling on cyclic deformation and localization of superelastic NiTi shape memory alloy. Int. J. Solids Struct. 2022, 250, 111723. [Google Scholar] [CrossRef]
- Shayanfard, P.; Heller, L.; Šandera, P.; Šittner, P. Numerical analysis of NiTi actuators with stress risers: The role of bias load and actuation temperature. Eng. Fract. Mech. 2021, 244, 107551. [Google Scholar] [CrossRef]
- Elahinia, M. Effect of System Dynamics on Shape Memory Alloy Behavior and Control. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2004. [Google Scholar]
- Elahinia, M.H. Shape Memory Alloy Actuators: Design, Fabrication, and Experimental Evaluation; John Wiley and Sons Inc.: Chichester, UK, 2015. [Google Scholar]
- Pagel, K.; Drossel, W.G.; Zorn, W. Multi-functional Shape-Memory-Actuator with guidance function. Prod. Eng. 2013, 7, 491–496. [Google Scholar] [CrossRef]
- Pagel, K. Entwicklung von Formgedächtnisaktoren mit Inhärenter Führungsfunktion. Ph.D. Thesis, Technische Universität Chemnitz, Auerbach Verlag Wissenschaftliche Scripten, Vogtland, Germany, 2018. [Google Scholar]
- Meier, H.; Oelschlaeger, L. Numerical thermomechanical modelling of shape memory alloy wires. Mater. Sci. Eng. A 2004, 378, 484–489. [Google Scholar] [CrossRef]
- Oelschläger, L. Numerische Modellierung des Aktivierungsverhaltens von Formgedächtnisaktoren am Beispiel Eines Schrittantriebes. Ph.D. Thesis, Schriftenreihe des Lehrstuhls für Produktionssysteme, Institut für Automatisierungstechnik, Lehrstuhl für Produktionssysteme, Shaker, Aachen, Germany, 2004. [Google Scholar]
- Shayanfard, P.; Kadkhodaei, M.; Jalalpour, A. Numerical and Experimental Investigation on Electro-Thermo-Mechanical Behavior of NiTi Shape Memory Alloy Wires. Iran. J. Sci. Technol. Trans. Mech. Eng. 2019, 43, 621–629. [Google Scholar] [CrossRef]
- Kalra, S.; Bhattacharya, B.; Munjal, B.S. Design of shape memory alloy actuated intelligent parabolic antenna for space applications. Smart Mater. Struct. 2017, 26, 095015. [Google Scholar] [CrossRef]
- Bhargaw, H.N.; Ahmed, M.; Sinha, P. Thermo-electric behaviour of NiTi shape memory alloy. Trans. Nonferrous Met. Soc. China 2013, 23, 2329–2335. [Google Scholar] [CrossRef]
- Sreekumar, M.; Singaperumal, M.; Nagarajan, T.; Zoppi, M.; Molfino, R. Recent advances in nonlinear control technologies for shape memory alloy actuators. J. Zhejiang Univ.-Sci. A 2007, 8, 818–829. [Google Scholar] [CrossRef]
- Zaidi, S.; Lamarque, F.; Favergeon, J.; Carton, O.; Prelle, C. Wavelength-Selective Shape Memory Alloy for Wireless Microactuation of a Bistable Curved Beam. IEEE Trans. Ind. Electron. 2011, 58, 5288–5295. [Google Scholar] [CrossRef]
- Liang, C.; Rogers, C.A. One-Dimensional Thermomechanical Constitutive Relations for Shape Memory Materials. J. Intell. Mater. Syst. Struct. 1990, 1, 207–234. [Google Scholar] [CrossRef]
- Antonucci, V.; Faiella, G.; Giordano, M.; Mennella, F.; Nicolais, L. Electrical resistivity study and characterization during NiTi phase transformations. Thermochim. Acta 2007, 462, 64–69. [Google Scholar] [CrossRef]
- Theren, B.; Otibar, D.; Weirich, A.; Brandenburg, J.; Kuhlenkötter, B. (Eds.) Methodology for Minimizing Operational Influences of the Test Rig During Long-Term Investigations of SMA Wires. In Proceedings of the ASME 2019 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Louisville, KY, USA, 9–11 September 2019. [Google Scholar] [CrossRef]
- Verein Deutscher Ingenieure. VDI 2248-Produktentwicklung mit Formgedächtnislegierungen (FGL); VDI-Guideline; Verein Deutscher Ingenieure: Düsseldorf, Germany, 2017. [Google Scholar]
- Nelson, W. Accelerated Testing: Statistical Models, Test Plans and Data Analysis; Wiley Series in Probability and Mathematical Statistics; Applied Probability and Statistics; Wiley-Interscience: Hoboken, NJ, USA, 2004. [Google Scholar]
- Escobar, L.A.; Meeker, W.Q. A Review of Accelerated Test Models. Stat. Sci. 2006, 21, 552–577. [Google Scholar] [CrossRef] [Green Version]
- Meeker, W.Q.; Escobar, L.A. Statistical Methods for Reliability Data; Wiley Series in Probability and Statistics; Applied Probability and Statistics Section; Wiley: New York, NY, USA, 1998. [Google Scholar]
- Pascual, F.; Meeker, W.; Escobar, L. Accelerated Life Test Models and Data Analysis. In Springer Handbook of Engineering Statistics; Pham, H., Ed.; Springer: London, UK, 2006; pp. 397–426. [Google Scholar] [CrossRef] [Green Version]
- Pearson, R.K. Data cleaning for dynamic modeling and control. In Proceedings of the 1999 European Control Conference (ECC), Karlsruhe, Germany, 31 August–3 September 1999; pp. 2584–2589. [Google Scholar] [CrossRef]
- Birolini, A. Reliability Engineering: Theory and Practice, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Rinne, H. The Weibull Distribution: A Handbook; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Sachs, L. Angewandte Statistik: Anwendung Statistischer Methoden; Elfte, überarbeitete und Aktualisierte Auflage; Springer eBook Collection Life Science and Basic Disciplines; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar] [CrossRef]
- Modarres, M.; Kaminskiy, M.; Krivtsov, V. Reliability Engineering and Risk Analysis: A Practical Guide; Quality and Reliability; Dekker: New York, NY, USA, 1999; Volume 55. [Google Scholar]
- Hartung, J. Statistik: Lehr- und Handbuch der Angewandten Statistik; Oldenbourg Wissenschaftsverlag: Munchen, Germany, 2012. [Google Scholar]
- Matthew Reid. MatthewReid854/Reliability: v0.5.1, Documentation of the Python Package Reliability. 2020. Available online: https://reliability.readthedocs.io/en/latest/index.html (accessed on 2 July 2022).
- Ghosh, J.K.; Delampady, M.; Samanta, T. An Introduction to Bayesian Analysis: Theory and Methods; Springer Texts in Statistics; Springer: New York, NY, USA, 2006. [Google Scholar]
- Akaike, H. A new look at the statistical model identification. IEEE Trans. Autom. Control 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Sachs, L. Applied Statistics: A Handbook of Techniques, 2nd ed.; Springer Series in Statistics; Springer: New York, NY, USA, 1984. [Google Scholar]
- Hedderich, J.; Sachs, L. Angewandte Statistik: Methodensammlung mit R, 16; überarbeitete und Erweiterte Auflage; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Verein Deutscher Ingenieure. VDI-Wärmeatlas; Springer Vieweg: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Theren, B.; Kuhlenkötter, B.; Schuleit, M.; Esen, C. A Method of Crack Monitoring for Electrically Activated SMA Wires Using Thermography. In Proceedings of the ASME 2020 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, American Society of Mechanical Engineers, Virtual, 15 September 2020. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Setup | Wire 1 | Wire 2 | Wire 3 | Average |
|---|---|---|---|---|
| 10,389 | 5944 | 8258 | 8197 | |
| 14,395 | 13,135 | 6467 | 11,332 | |
| 13,014 | 11,502 | 5711 | 10,076 | |
| Test setup I | 7997 | 11,967 | 7500 | 9155 |
| Loading 350 MPa | 14,127 | 12,055 | 6298 | 10,827 |
| Current for activation 0.8 A | 14,122 | 13,036 | 10,733 | 12,630 |
| Activation 3 s | 11,348 | 9282 | 9958 | 10,196 |
| Cooldown time 40 s | 15,425 | 13,722 | 11,859 | 13,669 |
| 13,611 | 15,493 | 12,963 | 14,022 | |
| 16,222 | 12,478 | 13,780 | 14,160 | |
| 35,635 | 16,419 | 20,872 | 24,309 | |
| Test setup | 31,192 | 11,633 | 11,099 | 17,975 |
| Loading 300 MPa | 74,819 | 12,225 | 27,428 | 19,827 |
| Voltage for activation 2.7 V | 120,772 | 18,587 | 36,087 | 27,337 |
| Activation 1 s | 34,389 | 23,316 | - | 19,235 |
| Cooldown time 12 s | 70,127 | 22,117 | - | 22,117 |
| 25,426 | 27,606 | - | 26,516 |
| Power supply | |
| Output voltage [V] | 0–32 |
| Output current [A] | 0–5 |
| Output power [W] | 160 |
| Rate of ascent/descent [V/s] | 2 |
| Output voltage | |
| Resolution [mV] | 2 |
| Setting accuracy [mV] | 0.025% + 10 mV |
| Measurement accuracy [mV] | 0.1% + 10 mV |
| Output current | |
| Resolution [mA] | 5 |
| Setting accuracy [mA] | 0.1% + 80 mA |
| Measurement accuracy [mA] | 0.1% + 80 mA |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Theren, B.; Heß, P.; Bracke, S.; Kuhlenkötter, B. The Development and Verification of a Simulation Model of Shape-Memory Alloy Wires for Strain Prediction. Crystals 2022, 12, 1121. https://doi.org/10.3390/cryst12081121
Theren B, Heß P, Bracke S, Kuhlenkötter B. The Development and Verification of a Simulation Model of Shape-Memory Alloy Wires for Strain Prediction. Crystals. 2022; 12(8):1121. https://doi.org/10.3390/cryst12081121
Chicago/Turabian StyleTheren, Benedict, Philipp Heß, Stefan Bracke, and Bernd Kuhlenkötter. 2022. "The Development and Verification of a Simulation Model of Shape-Memory Alloy Wires for Strain Prediction" Crystals 12, no. 8: 1121. https://doi.org/10.3390/cryst12081121
APA StyleTheren, B., Heß, P., Bracke, S., & Kuhlenkötter, B. (2022). The Development and Verification of a Simulation Model of Shape-Memory Alloy Wires for Strain Prediction. Crystals, 12(8), 1121. https://doi.org/10.3390/cryst12081121