1. Introduction
The ideas of backward induction and forward induction play a prominent role in the literature on dynamic games. Often, terms like backward and forward induction reasoning, and backward and forward induction concepts, are used to describe a particular pattern of reasoning in such games. But what exactly do we mean by backward induction and forward induction?
The literature offers no precise answer here. Only for the class of dynamic games with perfect information there is a clear definition of backward induction (based on Zermelo [
5]), but otherwise there is no consensus on how to precisely formalize backward and forward induction. In fact, various authors have presented their own, personal interpretation of these two ideas. Despite this variety, there seems to be a common message in the authors’ definitions of backward and forward induction, which can be described as follows:
Backward induction represents a pattern of reasoning in which a player, at every stage of the game, only reasons about the opponents’ future behavior and beliefs, and not about choices that have been made in the past. So, he takes the opponents’ past choices for granted, but does not draw any new conclusions from these.
In contrast, forward induction requires a player, at every stage, to think critically about the observed past choices by his opponents. He should always try to find a plausible reason for why his opponents have made precisely these choices in the past, and he should use this to possibly reconsider his belief about the opponents’ future, present, and unobserved past choices.
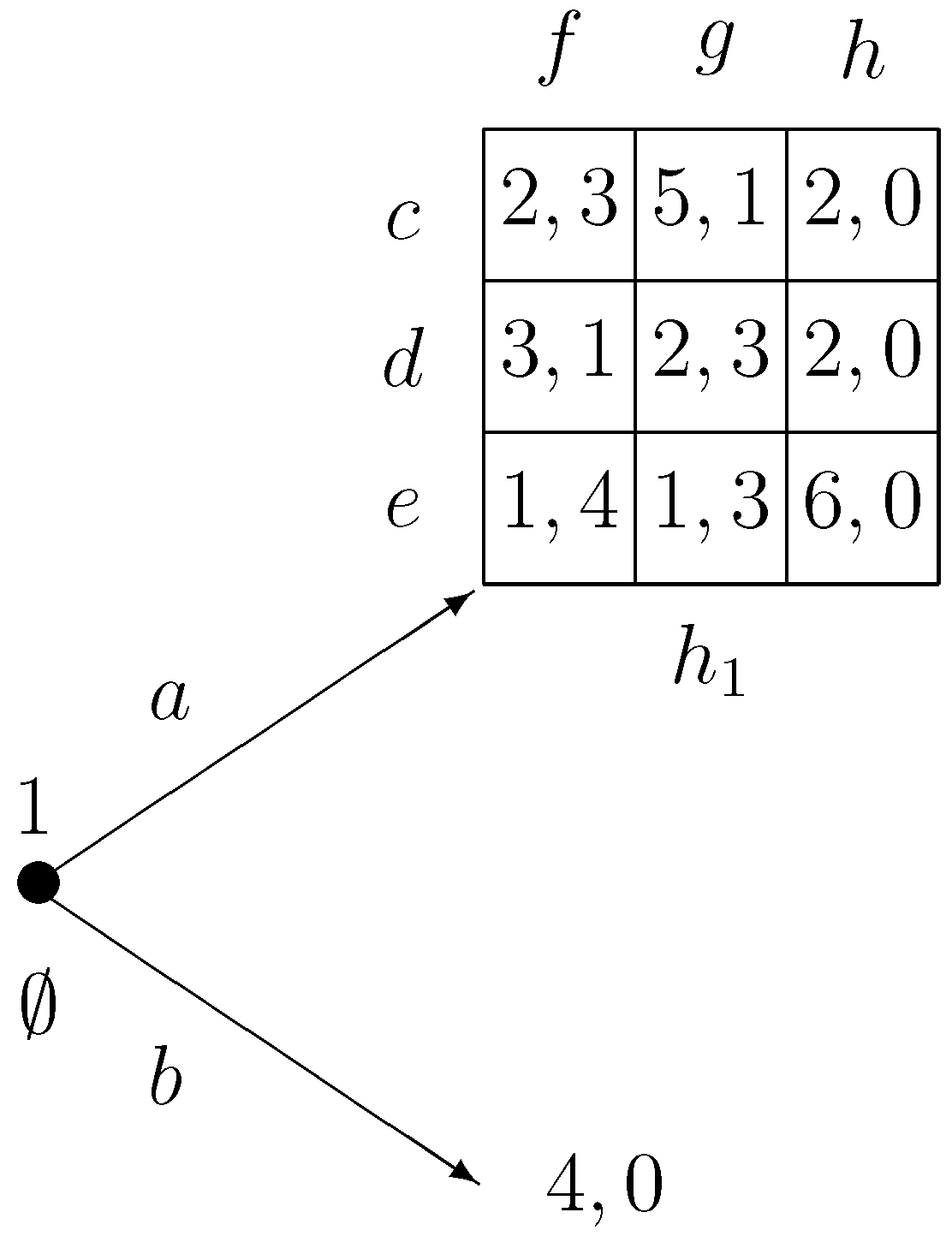
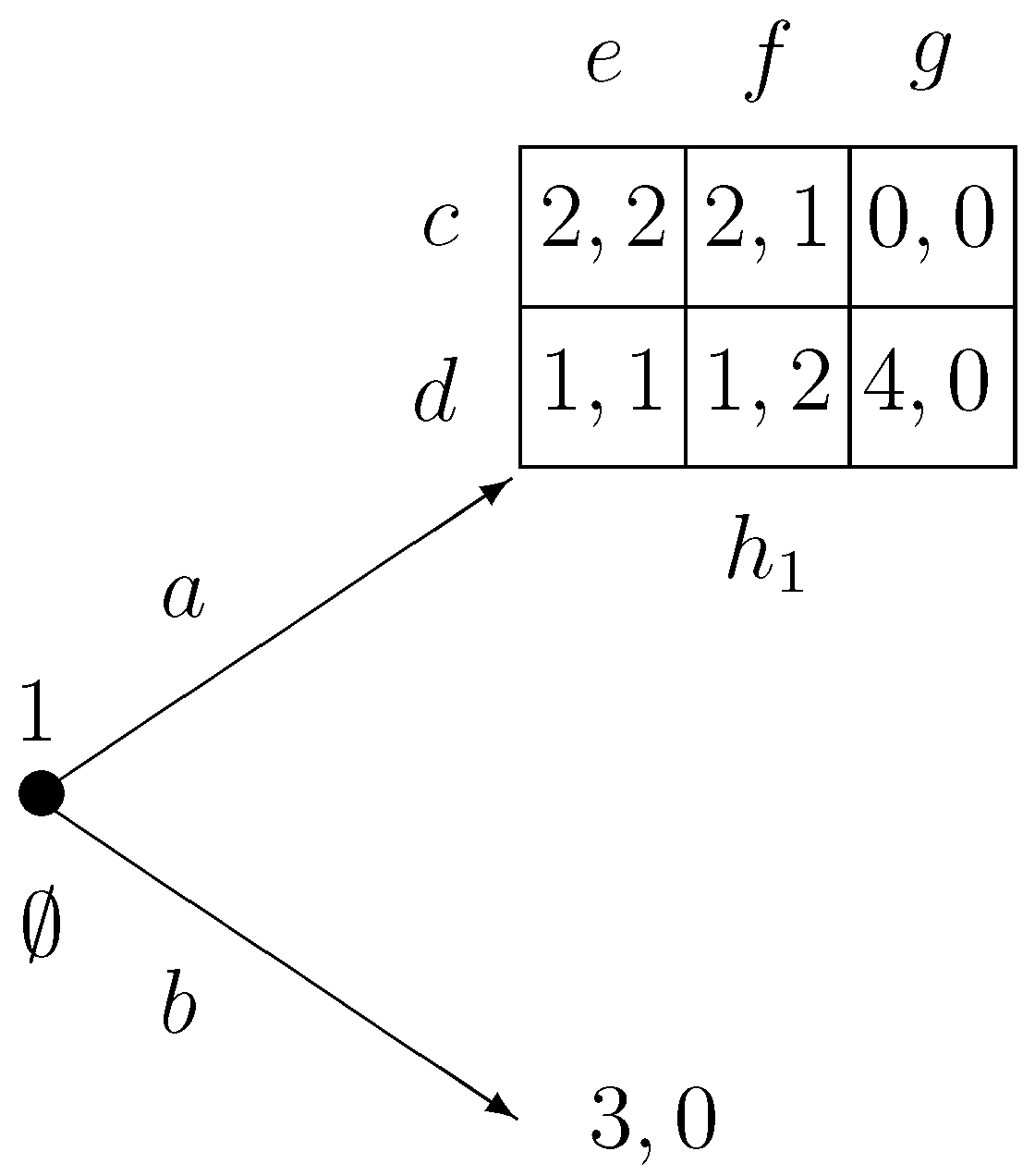
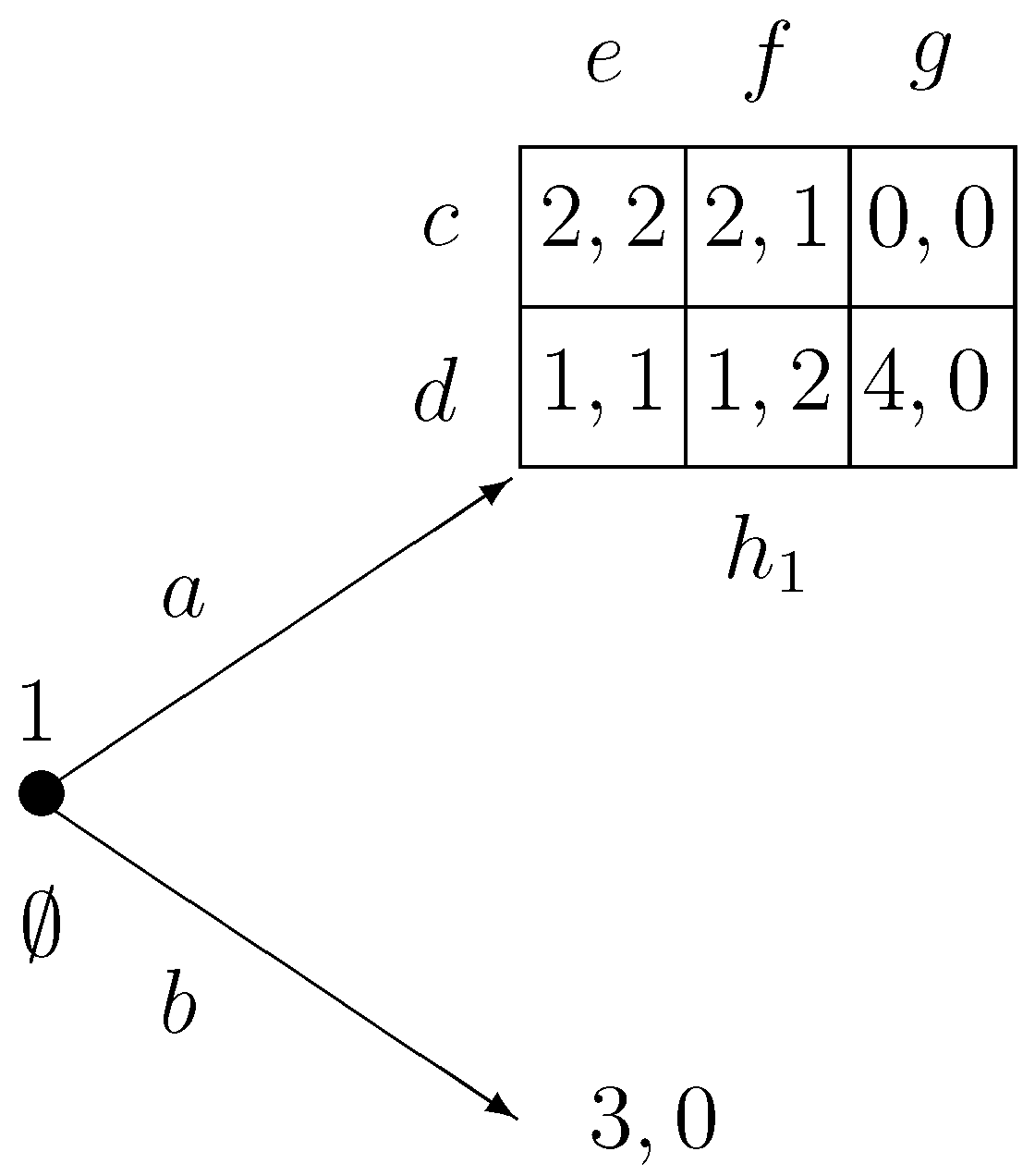
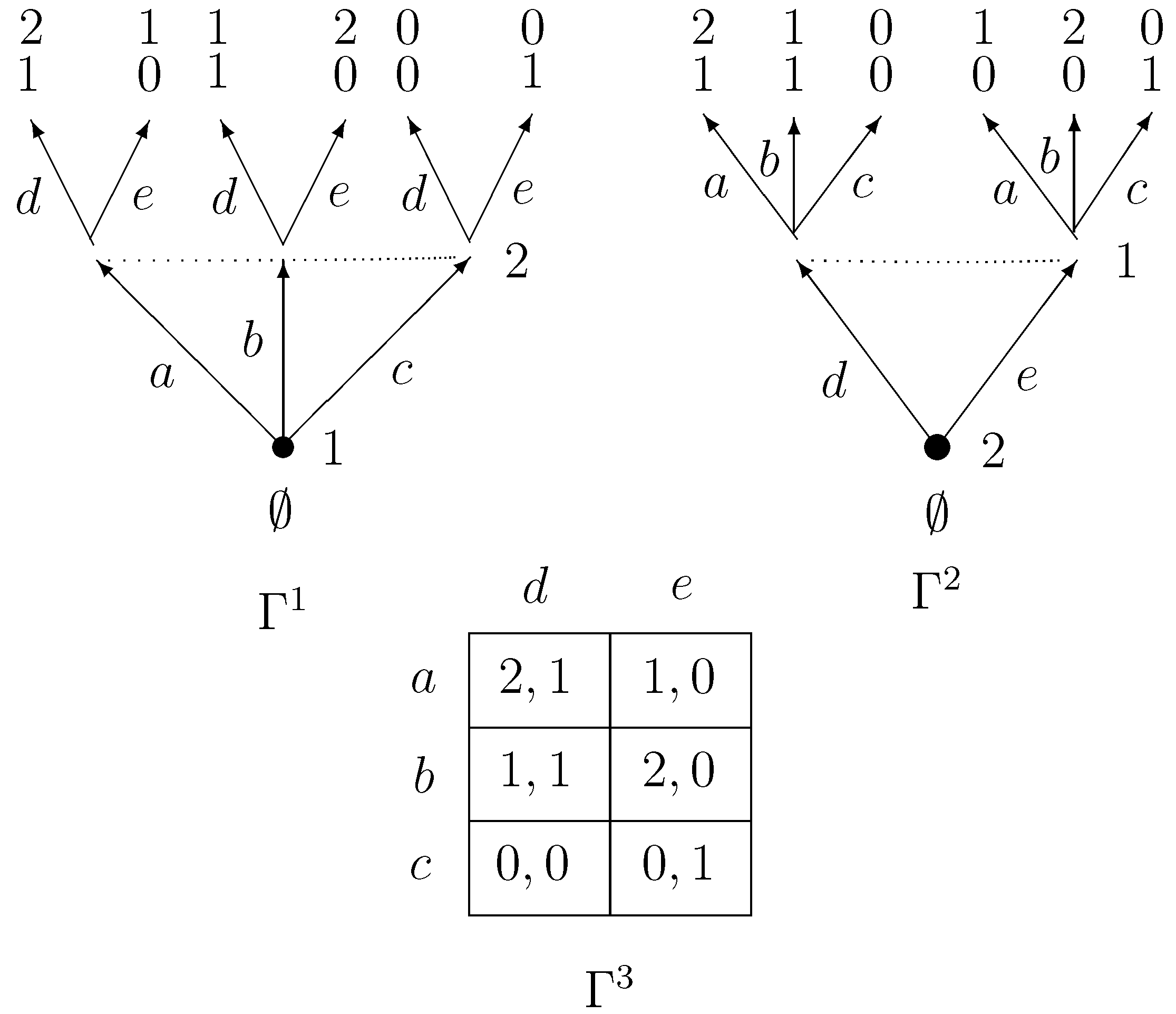
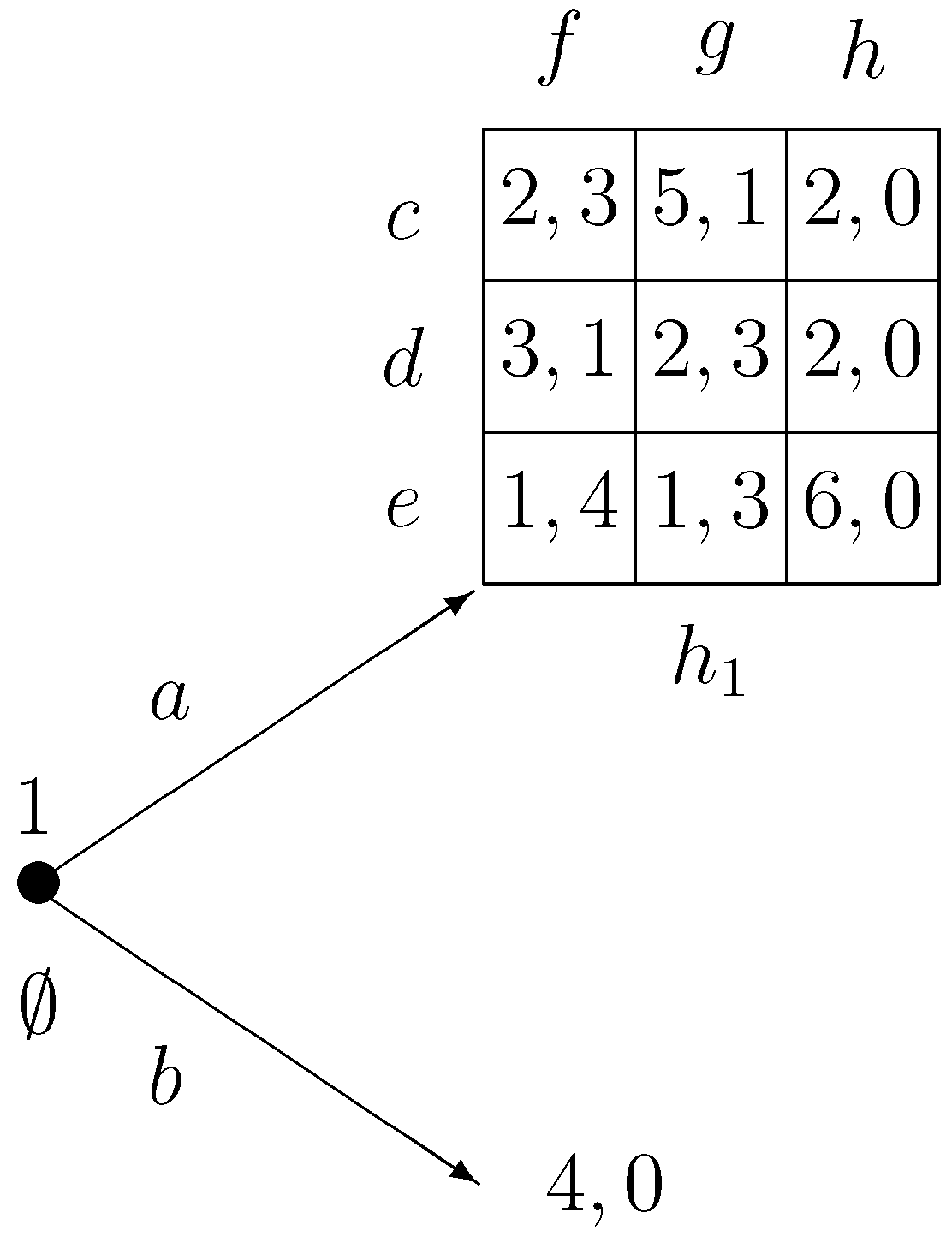
In order to illustrate these two ideas, let us consider the game in
Figure 1. So, at the beginning of the game, ∅, player 1 chooses between
a and
If he chooses
the game ends and the players’ utilities are 3 and
If he chooses
the game moves to information set
where players 1 and 2 simultaneously choose from
and
respectively.
Figure 1.
Backwards induction and forward induction may lead to opposite choices.
Figure 1.
Backwards induction and forward induction may lead to opposite choices.
If player 1 believes that player 2 chooses rationally, then he anticipates that player 2 will not choose and will therefore choose b at the beginning. But suppose now that the game actually reaches and that player 2 must make a choice there. What should player 2 believe or do at
According to backward induction, player 2 should at only reason about player 1’s behavior and beliefs at and take his past choice a for granted. In that case, it is reasonable for player 2 to believe that player 1 still believes that player 2 will not choose Hence, player 2 will expect player 1 to choose c at and player 2 would thus go for strategy
According to forward induction, player 2 should at try to make sense of player 1’s past choice So, what reason could player 1 have to choose and not at the beginning? The only plausible reason could be that player 1 actually believed that player 2, with sufficiently high probability, would choose But if that were the case, then player 2 must conclude at that player 1 will choose d there, since that is his only chance to obtain more than 3. So, player 2 should then go for and not
So we see that backward and forward induction lead to opposite choices for player 2 in this game: backward induction leads to whereas forward induction leads to The crucial difference between the two ideas is that under backward induction, player 2 should at not draw any new conclusions from player 1’s past choice a. Under forward induction, player 2 should at use player 1’s past choice a to form a new belief about player 1, namely that he believes that player 2 will (with sufficiently high probability) go for
Up to this stage we have only given some very broad, and rather unprecise, descriptions of backward and forward induction. Sometimes such descriptions are enough to analyze a game, like the one in
Figure 1, but for other games it may be necessary to have a precise description of these two ideas, or to have them incorporated formally in some concept.
The literature actually offers a broad spectrum of formal concepts—most of these being
equilibrium concepts—that incorporate the ideas of backward and forward induction. Historically, the equilibrium concept of
sequential equilibrium (Kreps and Wilson [
6]) is regarded as an important backward induction concept. Its main condition,
sequential rationality, states that a player, at every stage, should believe that his opponents will make optimal choices at
present and
future information sets, given their beliefs there. No strategic conditions are imposed on beliefs about the opponents’
past behavior. As such, sequential equilibrium only requires a player to reason about his opponents’ future behavior, and may therefore be seen as a backward induction concept.
A problem with this concept, however, is that it incorporates an
equilibrium condition which is hard to justify if the game is only played once, especially when there is no communication between the players before the game starts (see Bernheim [
7] for a similar critique to Nash equilibrium). The equilibrium condition entails that a player believes that his opponents are correct about his own beliefs, and that he believes that two different players share the same belief about an opponent’s future behavior. Aumann and Brandenburger [
8], Asheim [
9] and Perea [
10] discuss similar conditions that lead to Nash equilibrium. Another drawback of the sequential equilibrium concept—and this is partially due to the equilibrium condition—is that the backward induction reasoning is somewhat
hidden in the definition of sequential equilibrium, and not explicitly formulated as such.
In contrast, a backward induction concept that does not impose such equilibrium conditions, and which is very explicit about the backward induction reasoning being used, is
common belief in future rationality (Perea [
1]). It is a belief-based concept which states that a player should always believe that his opponents will choose rationally now and in the future, that a player always believes that every opponent always believes that his opponents will choose rationally now and in the future, and so on. No other conditions are imposed. The concept is closely related to sequential rationalizability (Dekel, Fudenberg and Levine [
11,
12] and Asheim and Perea [
13]) and to backwards rationalizability (Penta [
14]). (See Perea [
1] for more details on this). Moreover, sequential equilibrium constitutes a refinement of common belief in future rationality, the main difference being the equilibrium condition that sequential equilibrium additionally imposes. In a sense, common belief in future rationality can be regarded as a backward induction concept that is similar to, but more basic and transparent than, sequential equilibrium. It can therefore serve as a basic representative of the idea of backward induction in general dynamic games, and we will use it as such in this paper.
Let us now turn to forward induction reasoning. In the 1980’s and 1990’s, forward induction has traditionally be modeled by equilibrium refinements. Some of these have been formulated as refinements of sequential equilibrium, by restricting the players’ beliefs about the opponents’
past behavior as well. Examples are justifiable sequential equilibrium (McLennan [
15]), forward induction equilibrium (Cho [
16]) and stable sets of beliefs (Hillas [
17]) for general dynamic games, and the intuitive criterion (Cho and Kreps [
18]) and its various refinements for signaling games. By doing so, these authors have actually been incorporating a forward induction argument
inside a backward induction concept, namely sequential equilibrium. So in a sense we are combining backward induction and forward induction in one and the same concept, and the result is a concept which does not purely represent the idea of backward induction nor forward induction.
As a consequence, these forward induction refinements of sequential equilibrium may fail to select intuitive forward induction strategies in certain games. Reconsider, for instance, the game in
Figure 1. We have seen above that a natural forward induction argument uniquely selects strategy
f for player 2. However, any forward induction refinement of sequential equilibrium necessarily selects only
e for player 2. The reason is that
e is the only sequential equilibrium strategy for player 2, so refining the sequential equilibrium concept will not be of any help here.
There are other forward induction equilibrium concepts that are
not refinements of sequential equilibrium. Examples are stable sets of equilibria (Kohlberg and Mertens [
19]), explicable equilibrium (Reny [
20]) and Govindan and Wilson’s [
21] definition of forward induction—the latter two concepts being refinements of
weak sequential equilibrium (Reny [
20]) rather than sequential equilibrium.
As before, a problem with these equilibrium refinements is that it incorporates an equilibrium assumption which is problematic from an epistemic viewpoint. Moreover, the forward induction reasoning in these concepts is often not as transparent as it could be, partially due to this equilibrium assumption. In addition, the example in
Figure 1 shows that in order to define a “pure” forward induction concept, we must step outside sequential equilibrium, and in fact step outside any backward induction concept, and simply build a new concept “from scratch”.
This is exactly what Pearce [
2] did when he presented his
extensive form rationalizability concept. The main idea is that a player, at each of his information sets, asks whether this information set could have been reached by rational
1 strategy choices by the opponents. If so, then he must believe that his opponents indeed
do play rational strategies. In that case, he also asks whether this same information set could also have been reached by opponents who do not only choose rationally themselves, but who also believe that the other players choose rationally as well. If so, then he
must believe that his opponents believe that the other players choose rationally as well. Iterating this argument finally leads to extensive form rationalizability.
This concept has many appealing properties. First, it is purely based on some very intuitive forward induction arguments, and not incorporated into some existing backward induction concept. In that sense, it is a very pure forward induction concept. Also, it has received a very appealing epistemic foundation in the literature (Battigalli and Siniscalchi [
4]), and there is nowadays an easy elimination procedure supporting it (Shimoji and Watson [
22]). So, the concept is attractive on an intuitive, an epistemic, and a practical level. That is why we will use this concept in this paper as a possible, appealing representative of the idea of forward induction.
The main objective of this paper is to compare the concept of common belief in future rationality—as a representative of backward induction reasoning—with the concept of extensive form rationalizability—as a representative of forward induction reasoning. By doing so, we hope this paper will contribute towards better understanding the differences and similarities between backward induction and forward induction reasoning in dynamic games.
The outline of this paper is as follows. In
Section 2 we formally present the class of dynamic games we consider, and develop an epistemic model for such games in order to formally represent the players’ belief hierarchies. In
Section 3 we define the concept of common belief in future rationality and present an elimination procedure,
backward dominance, that supports it.
Section 4 presents the concept of extensive form rationalizability, discusses Battigalli and Siniscalchi’s [
4] epistemic foundation, and presents Shimoji and Watson’s [
22]
iterated conditional dominance procedure that supports it. In
Section 5 we explicitly compare the two concepts with each other on a conceptual, epistemic and an algorithmic level.
2. Model
In this section we formally present the class of dynamic games we consider, and explain how to build an epistemic model for such dynamic games.
2.1. Dynamic Games
As we expect the reader to be familiar with the model of a dynamic game (or, extensive form game), we only list the relevant ingredients and introduce some pieces of notation. By I we denote the set of players, by X the set of non-terminal histories (or nodes) and by Z the set of terminal histories. By ∅ we denote the beginning (or root) of the game. For every player we denote by the collection of information sets for that player. Every information set consists of a set of non-terminal histories. At every information set we denote by the set of choices (or actions) for player i at We assume that all sets mentioned above are finite, and hence we restrict to finite dynamic games in this paper. Finally, for every terminal history z and player we denote by the utility for player i at As usual, we assume that there is perfect recall, meaning that a player never forgets what he previously did, and what he previously knew about the opponents’ past choices.
We explicitly allow for
simultaneous moves in the dynamic game. That is, we allow for non-terminal histories at which several players make a choice. Formally, this means that for some non-terminal histories
x there may be different players
i and
and information sets
and
such that
and
In this case, we say that the information sets
and
are
simultaneous. Explicitly allowing for simultaneous moves is important in this paper, especially for describing the concept of
common belief in future rationality. We will come back to the issue of simultaneous moves in
Section 3, when we formally introduce common belief in future rationality.
Say that an information set h follows some other information set if there are histories and such that y is on the unique path from the root to Finally, we say that information set h weakly follows if either h follows or h and are simultaneous.
2.2. Strategies
A strategy for player i is a complete choice plan, prescribing a choice at each of his information sets that can possibly be reached by this choice plan. Formally, for every such that h precedes let be the choice at h for player i that leads to Note that is unique by perfect recall. Consider a subset not necessarily containing all information sets for player i, and a function that assigns to every some choice We say that possibly reaches an information set h if at every preceding h we have that By we denote the collection of player i information sets that possibly reaches. A strategy for player i is a function assigning to every some choice such that
Notice that this definition slightly differs from the standard definition of a strategy in the literature. Usually, a strategy for player
i is defined as a mapping that assigns to
every information set
some available choice—also to those information sets
h that cannot be reached by
The definition of a strategy we use corresponds to what Rubinstein [
23] calls a
plan of action. One can also interpret it as the equivalence class of strategies (in the classical sense) that are outcome-equivalent. Hence, taking for every player the set of strategies as we use it corresponds to considering the pure strategy reduced normal form. However, for the concepts and results in this paper it does not make any difference which notion of strategy we use.
For a given information set denote by the set of strategies for player i that possibly reach By we denote the strategy profiles for i’s opponents that possibly reach that is, if there is some such that reaches some history in By we denote the set of strategy profiles that reach some history in By perfect recall we have that for every player i and every information set
2.3. Epistemic Model
We now wish to model the players’ beliefs in the game. At every information set player i holds a belief about (a) the opponents’ strategy choices, (b) the beliefs that the opponents have, at their information sets, about the other players’ strategy choices, (c) the beliefs that the opponents have, at their information sets, about the beliefs their opponents have, at their information sets, about the other players’ strategy choices, and so on. A possible way to represent such conditional belief hierarchies is as follows.
(Epistemic model) Consider a dynamic game Γ. An epistemic model for Γ is a tuple where
(a) is a compact topological space, representing the set of types for player
(b) is a function that assigns to every type and every information set a probability distribution
Recall that represents the set of opponents’ strategy combinations that possibly reach By we denote the set of opponents’ type combinations. For a topological space we denote by the set of probability distributions on X with respect to the Borel σ-algebra. So, if there are more than two players in the game, we allow the players to hold correlated beliefs about the opponents’ strategy choices (and types) at each of their information sets.
This model can be seen as an extension of the epistemic model in Ben-Porath [
24], which was constructed specifically for games with perfect information. A similar model can also be found in Battigalli and Siniscalchi [
25]. It is an
implicit model, since we do not write down the belief hierarchies for the types explicitly, but these can rather be
derived from the model. Namely, at every information set
a type
holds a conditional probabilistic belief
about the opponents’ strategies and types. In particular, type
holds conditional beliefs about the opponents’ strategies. As every opponent’s type holds conditional beliefs about the other players’ strategies, every type
holds at every
also a conditional belief about the opponents’ conditional beliefs about the other players’ strategy choices. And so on. So, in this way we can derive for every type the associated infinite conditional belief hierarchy. Since a type may hold different beliefs at different histories, a type may, during the game, revise his belief about the opponents’ strategies, but also about the opponents’ conditional beliefs.
To formally describe the concept of common strong belief in rationality, we need epistemic models that are complete, which means that every possible belief hierarchy must be present in the model.
(Complete epistemic model) An epistemic model is complete if for every conditional belief vector in there is some type with for every
So, a complete epistemic model must necessarily be infinite. Battigalli and Siniscalchi [
25] have shown that a complete epistemic model always exists for finite dynamic games, such as the ones we consider in this paper.
3. Common Belief in Future Rationality
We now present the concept of
common belief in future rationality (Perea [
1]), which is a typical backward induction concept. The idea is that a player always believes that (a) his opponents will choose rationally now and in the future, (b) his opponents always believe that their opponents will choose rationally now and in the future, and so on. After giving a precise epistemic formulation of this concept, we describe an algorithm,
backward dominance, that supports it, and we illustrate this algorithm by means of an example.
3.1. Epistemic Formulation
We first define what it means for a strategy to be optimal for a type at a given information set Consider a type a strategy and an information set that is possibly reached by By | we denote the expected utility from choosing under the conditional belief that holds at h about the opponents’ strategy choices.
(Optimality at a given information set) Consider a type a strategy and a history Strategy is optimal for type at h if || for all
Remember that is the set of player i strategies that possibly reach We can now define belief in the opponents’ future rationality.
(Belief in the opponents’ future rationality) Consider a type , an information set and an opponent Type believes at h in j’s future rationality if only assigns positive probability to j’s strategy-type pairs where is optimal for at every that weakly follows Type believes in the opponents’ future rationality if at every type believes in every opponent’s future rationality.
So, to be precise, a type that believes in the opponents’ future rationality believes that every opponent chooses rationally now (if the opponent makes a choice at a simultaneous information set), and at every information set that follows. As such, the correct terminology would be “belief in the opponents’ present and future rationality”, but we stick to “belief in the opponents’ future rationality” as to keep the name short.
Next, we formalize the requirement that a player should not only believe in the opponents’ future rationality, but should also always believe that every opponent believes in his opponents’ future rationality, and so on.
(Common belief in future rationality) Type expresses common belief in future rationality if (a) believes in the opponents’ future rationality, (b) assigns, at every information set, only positive probability to opponents’ types that believe in their opponents’ future rationality, (c) assigns, at every information set, only positive probability to opponents’ types that, at every information set, only assign positive probability to opponents’ types that believe in the opponents’ future rationality, and so on.
Finally, we define those strategies that can rationally be chosen under common belief in future rationality. We say that a strategy is rational for a type if is optimal for at every In the literature, this is often called sequential rationality. We say that strategy can rationally be chosen under common belief in future rationality if there is some epistemic model and some type such that expresses common belief in future rationality, and is rational for
For the concept of
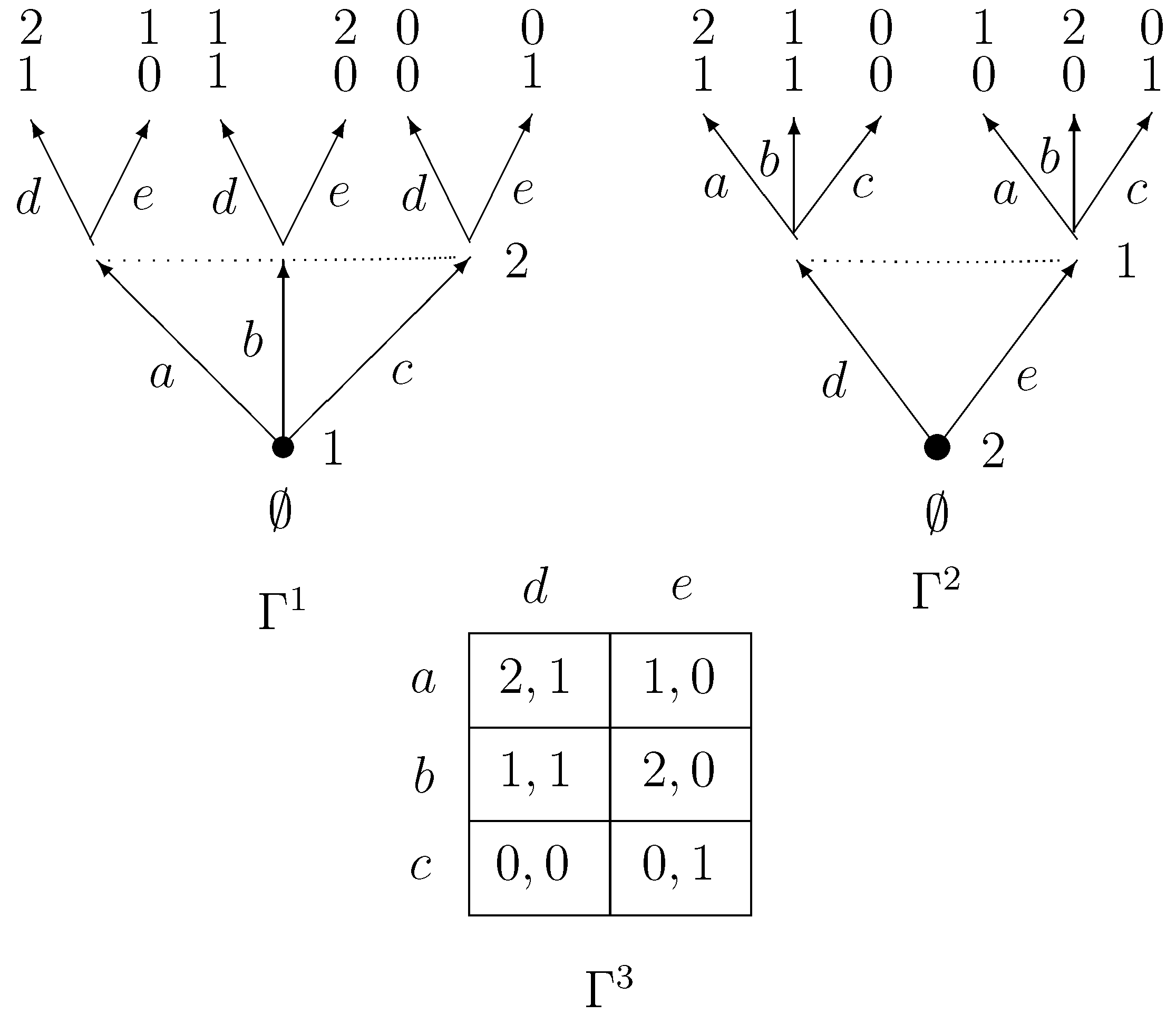
common belief in future rationality, it is crucial how we model the chronological order of moves in the game! Consider, for instance, the three games in
Figure 2.
Figure 2.
Chronological order of moves matters for “common belief in future rationality”.
Figure 2.
Chronological order of moves matters for “common belief in future rationality”.
In game
player 1 moves before player 2, in game
player 2 moves before player 1, and in game
both players choose simultaneously. In
and
the second mover does not know which choice has been made by the first mover. So, all three games represent a situation in which both players choose in complete ignorance of the opponent’s choice. Since the utilities in the games are identical, one can argue that these three games are in some sense “equivalent”. In fact, the three games above only differ by applying the transformation of
interchange of decision nodes2, as defined by Thompson [
26]. However, for the concept of
common belief in future rationality it crucially matters which of the three representations
or
we choose.
In the game common belief in future rationality does not restrict player 2’s belief at all, as player 1 moves before him. So, player 2 can rationally choose d and e under common belief in future rationality here. On the other hand, player 1 may believe that player 2 chooses d or e under common belief in future rationality, and hence player 1 himself may rationally choose a or b under common belief in future rationality.
In the game common belief in future rationality does not restrict player 1’s beliefs as he moves after player 2. Hence, player 1 may rationally choose a or b under common belief in future rationality. Player 2 must therefore believe that player 1 will either choose a or b in the future, and hence player 2 can only rationally choose d under common belief in future rationality.
In the game finally, player 1 can only rationally choose and player 2 can only rationally choose d under common belief in future rationality. Namely, if player 2 believes in player 1’s (present and) future rationality, then player 2 believes that player 1 does not choose since player 1 moves at the same time as player 2. Therefore, player 2 can only rationally choose d under common belief in future rationality. If player 1 believes in player 2’s (present and) future rationality, and believes that player 2 believes in player 1’s (present and) future rationality, then player 1 believes that player 2 chooses and therefore player 1 can only rationally choose a under common belief in future rationality.
Hence, the precise order of moves is very important for the concept of common belief in future rationality! In particular, this concept is
not invariant with respect to Thompson’s [
26] transformation of
interchange of decision nodes. We will come back to this issue in
Section 5.3.
3.2. Algorithm
Perea [
1] presents an algorithm,
backward dominance, that selects exactly those strategies than can rationally be chosen under common belief in future rationality. The algorithm proceeds by successively eliminating, at every information set, some strategies for the players. In the first round we eliminate, at every information set, those strategies for player
i that are strictly dominated at a present or future information set for player
In every further round
k we eliminate, at every information set, those strategies for player
i that are strictly dominated at a present or future information set
h for player
given the opponents’ strategies that have survived until round
k at that information set
We continue until we cannot eliminate anything more.
In order to formally state the backward dominance procedure, we need the following definitions. Consider an information set for player a subset of strategies for player i that possibly reach and a subset of strategy combinations for i’s opponents possibly reaching Then, is called a decision problem for player i at and we say that player i is active at this decision problem. Note that several players may be active at the same decision problem, since several players may make a simultaneous move at the associated information set. Within a decision problem for player i, a strategy is called strictly dominated if there is some randomized strategy such that for all A decision problem at h is said to weakly follow an information set if h weakly follows For a given information set the full decision problem at h is the decision problem where no strategies have been eliminated yet.
Backward dominance procedure
Initial step. For every information set let be the full decision problem at
Inductive step. Let and suppose that the decision problems have been defined for every information set Then, at every information set h delete from the decision problem those strategy combinations that involve a strategy of some player i that is strictly dominated within some decision problem for player i that weakly follows This yields the new decision problems Continue this procedure until no further strategies can be eliminated in this way.
Say that a strategy
survives the backward dominance procedure if
is in
for every
That is,
is never eliminated in the decision problem at the beginning of the game,
Since we only have finitely many strategies in the game, and the decision problems can only become smaller at every step, this procedure must converge after finitely many steps. Perea [
1] has shown that the algorithm always yields a nonempty set of strategies at every information set, and that the set of strategies surviving the algorithm is exactly the set of strategies that can rationally be chosen under common belief in future rationality. Combining these two insights then guarantees that common belief in future rationality is always possible—for every player we can always construct a type that expresses common belief in future rationality.
Note than the backward dominance procedure can be alternatively formulated as follows: If at a given decision problem for player i strategy is strictly dominated, then we eliminate at and at all decision problems that come before h—that is, we eliminate from h backwards. So, we can say that the backward dominance procedure, which characterizes the backward induction concept of common belief in future rationality, works by backward elimination. This, in turn, very clearly explains the word backward in backward induction concept.
3.3. Example
We will now illustrate the backward dominance procedure by means of an example. Consider again the game in
Figure 1. At the beginning of the procedure we start with two decision problems, namely the full decision problem
at ∅ where only player 1 is active, and the full decision problem
at
where both players are active. These decision problems can be found in
Table 1.
Table 1.
The full decision problems in
Figure 1.
Table 1.
The full decision problems in Figure 1.
![Games 01 00168 i001]() |
The backward dominance procedure does the following: In the first round, we eliminate from strategy as it is strictly dominated by b at player 1’s decision problem and we eliminate from and strategy g as it is strictly dominated by e and f at player 2’s decision problem In the second round, we eliminate from strategy as it strictly dominated by b at and we eliminate strategy also from as it is strictly dominated by at In the third round, finally, we eliminate from and strategy as it is strictly dominated by e in So, only strategies b and e remain at Hence, only strategies b and e can rationally be chosen under common belief in future rationality.
4. Extensive Form Rationalizability
We next turn to
extensive form rationalizability (Pearce [
2], Battigalli [
3], Battigalli and Siniscalchi [
4]), which is a typical forward induction concept. The idea is as follows: At every information set the corresponding player first asks whether this information set can be reached if his opponents would all choose rationally, that is, would choose optimally for some vectors of conditional beliefs. If so, then at that information set he must only assign positive probability to rational opponents’ strategies. In that case, he then asks: Can this information set also be reached by opponents’ strategies that are optimal if the opponents believe, whenever possible, that their opponents choose rationally? If so, then at that information set he must only assign positive probability to such opponents’ strategies. And so on. So, in a sense, at every information set the associated player looks for the highest degree of mutual belief in rationality that makes reaching this information set possible, and his beliefs at that information set should reflect this highest degree. We first provide a precise epistemic formulation of this concept, and then present an algorithm,
iterated conditional dominance, that supports it. We finally illustrate the algorithm by means of an example.
4.1. Epistemic Formulation
The starting point in extensive form rationalizability is that a player, whenever possible, must believe that his opponents choose rationally. That is, if player
i is at information set
he first asks whether
h could have been reached by rational opponents’ strategies. If so, then at
h he must assign positive probability
only to rational opponents’ strategies. We say that player
i strongly believes in the opponents’ rationality (Battigalli and Siniscalchi [
4]).
In order to formalize this idea within an epistemic model, we must make sure that there are “enough” types in the model. To be more precise, if for a given information set
there is a rational strategy
for opponent
j that possibly reaches
then there must be a type for player
j inside the model for which
is optimal. Consider, for instance, the game in
Figure 1, and suppose that our epistemic model would contain only one type for player 1, which believes that player 2 will choose
Then, on the one hand, there is a rational strategy for player 1 that reaches
namely
But the epistemic model does not contain a type for player 1 for which
is optimal. So, in this case, we must make sure that the epistemic model contains at least one type for player 1 for which
is optimal.
To guarantee this, it is enough to have a complete epistemic model. Namely, a complete model contains all possible belief hierarchies, so every potentially optimal strategy can be rationalized by at least one type in this model.
To formally define strong belief in the opponents’ rationality, we need the following piece of notation: For every player
information set
and subset of opponents’ types
let
Recall that strategy
is rational for type
if
is optimal for
at every information set in
(Strong belief in the opponents’ rationality) Consider a complete epistemic model A type strongly believes in the opponents’ rationality if at every with it holds that
That is, if for every opponent j there is strategy leading to h and a type for which is rational, then type must at h only consider strategy-type pairs where is rational for type Let us define by the set of types that strongly believe in the opponents’ rationality.
Now, suppose that player
i is at
and that
So,
h could have been reached by rational opponents’ strategies. The next question that extensive form rationalizability asks is: Could
h have been reached by opponents’ strategies
that are optimal for opponents’ types
that strongly believe in their opponents’ rationality? If so, then player
i at
h should only consider such pairs
In other words, if
then player
i must at
h only consider opponents’ strategy-type combinations in
By iterating this argument, we arrive at the following recursive definition of
common strong belief in rationality (Battigalli and Siniscalchi [
4]).
(Common strong belief in rationality) Consider a complete epistemic model Let for every player For every and every player let contain those types such that at every with it holds that A type expresses common strong belief in rationality if for all
We say that strategy can rationally be chosen under common strong belief in rationality if there is some complete epistemic model and some type expressing common strong belief in rationality, such that is rational for
4.2. Algorithm
The concept of
extensive form rationalizability has originally been proposed in Pearce [
2] by means of an iterated reduction procedure. Later, Battigalli [
3] has simplified this procedure and has shown that it delivers the same output as Pearce’s procedure. Both procedures refine at every round the sets of strategies and conditional beliefs of the players. Battigalli and Siniscalchi [
4] have shown that common strong belief in rationality selects exactly the extensive form rationalizable strategies for every player.
In this section we will consider yet another procedure leading to extensive form rationalizability, namely the
iterated conditional dominance procedure developed by Shimoji and Watson [
22]. The reason is that this procedure is closer to the backward dominance algorithm for common belief in future rationality, and therefore easier to compare.
The iterated conditional dominance procedure, like the backward dominance procedure, iteratedly removes strategies from decision problems. However, the criteria for removing a strategy in a particular decision problem are different. Remember that in the backward dominance procedure we remove a strategy for player i in the decision problem at h whenever it is strictly dominated in some decision problem for player i that weakly follows h. In the iterated conditional dominance procedure we remove a strategy for player i at the decision problem at h if there is some decision problem for player not necessarily weakly following at which it is strictly dominated. So, in the iterated conditional dominance procedure we would remove strategy at h also if it is strictly dominated at some decision problem for player i that comes before Formally, the procedure can be formulated as follows.
Iterated conditional dominance procedure
Initial step. For every information set let be the full decision problem at
Inductive step. Let and suppose that the decision problems have been defined for every information set Then, at every information set h delete from the decision problem those strategy combinations that involve a strategy for some player i that is strictly dominated within some decision problem for player not necessarily weakly following This yields the new decision problems Continue this procedure until no further strategies can be eliminated in this way.
A strategy
is said to survive this procedure if
for all
Shimoji and Watson [
22] have shown that this procedure delivers exactly the set of extensive form rationalizable strategies. Hence, by Battigalli and Siniscalchi’s [
4] result, the iterated conditional dominance procedure selects exactly those strategies that can rationally be chosen under common strong belief in rationality.
Note that in the iterated conditional dominance procedure, it is possible that at a given decision problem all strategies of a player i will be eliminated in step k—something that can never happen in the backward dominance procedure. Consider, namely, some information set and some information set following Then, it is possible that within the decision problem all strategies for player i in are strictly dominated. In that case, we would eliminate in all remaining strategies for player i! Whenever this occurs, it is understood that at every further step nothing can be eliminated from the decision problem at anymore.
The iterated conditional dominance procedure thus has the following property: If at a given decision problem for player i the strategy is strictly dominated, then we eliminate at and at all decision problems that come before and after it—that is, we eliminate from h backwards and forward. So this algorithm, which characterizes the forward induction concept of extensive form rationalizability, proceeds by backward and forward elimination. From this perspective, the name “forward induction” is actually a bit misleading, as it would suggest the concept to work only in a forward fashion. This is not true: Extensive form rationalizability, when considered algorithmically, works both backwards and forward.
4.3. Example
To illustrate the iterated conditional dominance procedure, consider again the game from
Figure 1, with its full decision problems
and
as depicted in
Table 1. The iterated conditional dominance procedure works as follows here:
In the first round, we eliminate strategy from and as it is strictly dominated by b at player 1’s decision problem and we eliminate from and strategy g as it is strictly dominated by e and f at player 2’s decision problem In the second round, we eliminate from and as it is strictly dominated by b at and we eliminate e from and as it is strictly dominated by f in This only leaves strategies b and f at and hence only strategies b and f can rationally be chosen under extensive form rationalizability.
Recall that the backward dominance procedure uniquely selected strategies b and and hence only e can rationally be chosen by player 2 under common belief in future rationality. So, we see that both procedures (and hence their associated epistemic concepts) lead to unique but different strategy choices for player 2 in this example.
The crucial difference between both concepts lies in how player 2 at explains the surprise that player 1 has not chosen Under common belief in future rationality, player 2 believes at that player 1 has simply made a mistake, but he still believes that player 1 will choose rationally at and he still believes that player 1 believes that he will not choose g at So, player 2 believes at that player 1 will choose and therefore player 2 will choose e at Under extensive form rationalizability, player 2 believes at that player 1’s decision not to choose b was a rational decision, but this is only possible if player 2 believes at that player 1 believes that player 2 will irrationally choose g at (with sufficiently high probability). In that case, player 2 will believe at that player 1 will go for and therefore player 2 will choose f at
5. Comparision Between the Concepts
In this section we will compare the concepts of common belief in future rationality and extensive form rationalizability (common strong belief in rationality) on a conceptual, epistemic, algorithmic and behavioral level.
5.1. Conceptual Comparison: The Role of Rationality Orderings
An appealing way to look at extensive form rationalizability is by means of
rationality orderings over strategies (Battigalli [
29]). The idea is that for every player
i we have an ordered partition
of his strategy set, where
represents the set of “most rational” strategies,
the set of “least rational” strategies, and every strategy in
is deemed “more rational” than every strategy in
At every information set
player
i then looks for the most rational opponents’ strategies that reach
and assigns positive probability only to such opponents’ strategies. Important is that these rationality ordering are
global, that is, the players always use the
same rationality orderings over the opponents’ strategies to form their conditional beliefs.
To illustrate this, consider the game in
Figure 3.
Figure 3.
Rationality orderings.
Figure 3.
Rationality orderings.
Among player 1’s strategies,
and
b are optimal for some belief, whereas
is not optimal for any belief. So,
may be considered the “least rational” strategy for player 1. So, for player 1 we have the “tentative” rationality ordering
For player 2, strategies
f and
g are optimal at
for some belief, whereas
h is not optimal at
for any belief. Hence, for player 2 we have the tentative rationality ordering
Now, if player 1 believes that player 2 does not choose his least rational strategy
then only
and
b can be optimal, and not
. So, we obtain a refined rationality ordering
for player 1. Similarly, if player 2 believes at
that player 1 will not choose his least rational strategy
then only
f can be optimal, and not
So, for player 2 we obtain the refined rationality ordering
But then, if player 1 believes that player 2 will choose his most rational strategy
then player 1 will choose
So, the final rationality orderings for the players are
Hence, if player 2 finds himself at
he believes that player 1 has chosen the most rational strategy that reaches
which is
Player 2 must therefore choose
and player 1, anticipating on this, should choose
This is exactly what extensive form rationalizability does for this game.
Important is that both players agree on these specific rationality orderings and and that player 2 uses the rationality ordering throughout the game, in particular at to form his conditional belief there.
In contrast, the concept of common belief in future rationality
cannot be described in terms of rationality orderings, or at least not by
global rationality orderings that are used throughout the whole game. Consider again the game in
Figure 3. Common belief in future rationality reasons as follows here: Player 1, at ∅ and at
must believe that player 2 chooses rationally at
and hence must believe that player 2 will not choose
Player 2, at
believes that player 1, at
believes in 2’s rationality at
Hence, player 2 believes at
that player 1 believes that 2 will not choose
Also, player 2 believes at
that player 1 chooses rationally at
and hence player 2 believes at
that player 1 will not choose
. No further conclusions can be drawn at
Hence, player 2 can choose
f or
g at
But then, player 1 can choose
or
So, common belief in future rationality selects strategies
and
b for player 1, and strategies
f and
g for player 2.
Can this reasoning be represented by global rationality orderings on the players’ strategies? The answer is “no”. Suppose, namely, that such rationality orderings and would exist. As common belief in future rationality selects only the strategies and b for player 1, strategies and b should both be most rational under But then, if player 2 is at he should conclude that player 1 has chosen as it is the most rational strategy under that reaches Consequently, player 2 should choose rendering a suboptimal strategy for player 1. This, however, would contradict where is considered to be a most rational strategy for player 1. Hence, there is no global rationality ordering on strategies that supports common belief in future rationality.
Rather, under common belief in future rationality, player 2 changes his rationality ordering over 1’s strategies as the game proceeds. At the beginning, player 2 deems and b more rational then and However, at player 2 deems and “equally” rational, as under common belief in future rationality player 2 may at believe that player 1 chooses or
5.2. Epistemic Comparison
By definition, a type for player i is said to express common belief in future rationality if it always believes in the opponents’ future rationality, always only assigns positive probability to opponents’ types that always believe in their opponents’ future rationality, always only assigns positive probability to opponents’ types that always only assign positive probability to other players’ types that always believe in their opponents’ future rationality, and so on. As a consequence, type always only assigns positive probability to opponents’ types that express common belief in future rationality too. Hence, every type that expresses common belief in future rationality believes at every stage of the game that each of his opponents expresses common belief in future rationality as well. We may thus say that the concept of common belief in future rationality is “closed under belief”.
Formally, “closed under belief” can be defined in the following way. Consider some epistemic model with sets of types for every player i. Let be a subset of types for every player Then, the combination of subsets of types is said to be closed under belief if for every player every type and every information set the conditional belief only assigns positive probability to opponents’ types that are in So if we take an epistemic model with sets of types and define to be the subset of types for player i that express common belief in future rationality, then the combination of type subsets expressing common belief in future rationality is closed under belief in the sense above.
The same cannot be said about
common strong belief in rationality—the epistemic foundation for
extensive form rationalizability. Consider for instance the game from
Figure 1. If player 2’s type
strongly believes in player 1’s rationality, then
must at
believe that player 1 has rationally chosen
More precisely, type
must at
only assign positive probability to strategy-type pairs
for player 1 where
is optimal for type
This, however, can only be the case if
assigns positive probability to player 2’s irrational strategy
But then,
does certainly not strongly believe in 2’s rationality. So we see that a type
for player 2 who strongly believes in 1’s rationality, must at
necessarily assign positive probability to a type
for player 1 who does
not strongly believe in 2’s rationality. In particular, a type
for player 2 that expresses common strong belief in rationality, must at
attach positive probability to a player 1 type
that does
not express common strong belief in rationality. Hence, the concept of common strong belief in rationality is certainly not closed under belief.
The latter is not surprising, as it follows from the very character of common strong belief in rationality. As we have seen in the previous subsection, this concept orders the players’ strategies, and also types, from “most rational” to “least rational”. Most rational are the types that express common strong belief in rationality, and least rational are the types that do not even strongly believe in the opponents’ rationality, and there may be some subclasses in between. The idea of common strong belief in rationality is that at every information set, the corresponding player searches for the “most rational” opponents’ types that could have been responsible for reaching this information set, and these opponents’ types do not necessarily express common strong belief in rationality. In fact, typically these opponents’ types are “less rational” than the “most rational types around”, which are the ones expressing common strong belief in rationality. So, it is no surprise that the concept of common strong belief in rationality is not “closed under belief”.
The fact that common belief in future rationality is closed under belief, and common strong belief in rationality is not, is also reflected in the
completeness of the epistemic model needed for these two concepts. Note that for defining common strong belief in rationality we required a
complete epistemic model (meaning that every possible belief hierarchy is present in the model), whereas for common belief in future rationality we did not. In fact, for the concept of common belief in future rationality a model with finitely many types is enough (see Perea [
1]). So why do we have this difference?
The reason is that under common strong belief in rationality, player i must ask at every information set whether h could have been reached by opponents’ strategies that are optimal for some beliefs. To answer this question, he must consider all possible opponents’ types—also those that do not express common strong belief in rationality—and see whether some of these types would support strategy choices that could lead to So, a complete epistemic model is needed here.
In contrast, under common belief in future rationality it is sufficient for player i to only consider opponents’ types that express common belief in future rationality as well. In other words, there is no need for player i to step outside the sets of types expressing common belief in future rationality, and that is why we do not need a complete epistemic model here.
5.3. Algorithmic Comparison
In
Section 3 and
Section 4 we have described two elimination procedures, backward dominance and iterated conditional dominance, that respectively lead to common belief in future rationality and extensive form rationalizability. A natural question is: Does the order and speed in which we eliminate strategies from the decision problems matter for the eventual result of these procedures? The answer is that it does not matter for the backward dominance procedure (see Perea [
1]), whereas the order and speed of elimination is crucial for the iterated conditional dominance procedure.
Consider, namely, the game from
Figure 1. Suppose that, in the first round of the iterated conditional dominance procedure, we would only eliminate strategy
but not
from
and
Then, in
strategy
is strictly dominated by
Suppose that in round 2 we would only eliminate strategy
from
and
Suppose that in round 3 we would eliminate strategy
f for player 2 at ∅ and
as it has become strictly dominated at
Suppose that, finally, we would eliminate
at ∅ and
So, for player 2 only strategy
e would survive the procedure in this case. Recall, however, that if we eliminate “all that we can” at every round of the iterated conditional dominance procedure, then only strategy
f would survive for player 2. Hence, the order and speed of elimination affects the outcome of the iterated conditional dominance procedure—it is absolutely crucial to eliminate at every round, and at every information set, all strategies we can.
Now, why is the order and speed of elimination relevant for the iterated conditional dominance procedure, but not for the backward dominance procedure? The reason has to do with rationality orderings as we have discussed them above. We have seen that extensive form rationalizability can be described by global rationality orderings on the players’ strategies, ranking them from “most rational” to “least rational”. At every information set, the corresponding player identifies the most rational opponents’ strategies that reach this information set, and assigns positive probability only to these strategies. For this construction to work, it is essential that all players agree on these specific rationality orderings.
The iterated conditional dominance procedure in fact generates these rationality orderings: All strategies that do not survive the first round are deemed “least rational”. All strategies that survive the first round, but not the second round, are deemed “second least rational” and so on. Finally, the strategies that survive all rounds are deemed “most rational”. So, this procedure does not only deliver the extensive form rationalizable strategies, it also delivers the rationality orderings on players’ strategies that support extensive form rationalizability. Since it is crucial that players agree on these rationality orderings, players must agree on the strategies that are eliminated at every round of the procedure: If at a certain round not all strategies that could be eliminated are in fact eliminated, then this would lead to a “coarser” rationality ordering in that round, which in turn could lead to completely different rationality orderings in the end.
This problem cannot occur for backward dominance: If at a certain information set a strategy that could have been eliminated is not in fact eliminated, then it will be eliminated at some later round anyhow. So, even if players would disagree on the order and speed of elimination, it would not affect their final strategy choices in the game.
We have seen in
Section 3 that the concept of common belief in future rationality is sensitive to the transformation of
interchange of decision nodes, as defined by Thompson [
26]. This can be seen very clearly from its associated algorithm—the backward dominance procedure. In this algorithm, namely, whenever a strategy
is strictly dominated at a decision problem
for player
we eliminate it from
and all decision problems
that come
before h, but we do not eliminate it at decision problems
that come
after By applying the transformation of
interchange of decision nodes, we may interchange the chronological order of two information sets
h and
So, before the transformation
h comes before
whereas after the transformation
comes before
Hence it is possible that
before the transformation we eliminate
at
h because it is strictly dominated at
whereas
after the transformation we can no longer do so because
h now comes after
That is, the transformation of
interchange of decision nodes may have important consequences for the output of the backward dominance procedure—and hence for the concept of common belief in future rationality.
It can be verified that the transformation of interchange of decision nodes has no consequences for the concept of extensive form rationalizability. This is most easily seen by studying the associated algorithm—the iterated conditional dominance procedure. In that procedure, whenever a strategy is strictly dominated at a decision problem for player we eliminate it at all decision problems in the game. Hence, the precise chronological order of the information sets does not play a role, only the structure of the various decision problems in the game. Since the transformation of interchange of decision nodes does not change this structure of the decision problems in the game, it easily follows that the iterated conditional dominance procedure—and hence the concept of extensive form rationalizability—is invariant under the transformation of interchange of decision nodes.
5.4. Behavioral Comparison
In this section we ask whether there is any logical relationship between the strategy choices selected by common belief in future rationality, and those selected by extensive form rationalizability. The answer is “no”. This can already be concluded from the example in
Figure 1. There, we have seen that common belief in future rationality uniquely selects strategy
e for player 2, whereas extensive form rationalizability uniquely selects strategy
f for this player. Hence, in this example both concepts yield completely opposite strategy selections for player 2.
There are other examples where common belief in future rationality is more restrictive than extensive form rationalizability, and yet other examples where it is exactly the other way around. Consider, for instance, the game from
Figure 3. There, common belief in future rationality yields strategy choices
and
b for player 1, and strategy choices
f and
g for player 2. Extensive form rationalizability, on the other hand, uniquely selects strategies
b and
So here extensive form rationalizability is more restrictive.
Now, replace in the example in
Figure 1 the outcome
by
Then, common belief in future rationality would select strategy
b for player 1, and strategy
e for player 2, whereas extensive form rationalizability would select strategy
b for player 1, and strategies
e and
f for player 2. So here common belief in future rationality is more restrictive.
Note, however, that in each of these examples the set of outcomes induced by extensive form rationalizability is always a subset of the set of outcomes induced by common belief in future rationality. My conjecture is that this is true in general, but I could not find a formal proof yet. (In fact we know that it is true for all generic games with perfect information – see the paragraph below). So I leave this here as an interesting open problem.
An important special class of dynamic games, both for theory and applications, is the class of games with perfect information. These are games where at every stage only one player moves, and he always observes the choices made by others so far. Such a game is called generic if, for every player i and every information set two different choices at h always lead to outcomes with different utilities for
In Perea [
1] it has been shown that for the class of generic dynamic games with perfect information, the concept of common belief in future rationality leads to the unique backward induction strategies for the players. Battigalli [
3] has proved that extensive form rationalizability, and hence common strong belief in rationality, leads to the backward induction
outcome, but
not necessarily to the backward induction
strategies, in such games. As a consequence, for generic games with perfect information both concepts lead to the same outcome, namely the backward induction outcome, but not necessarily to the same strategies for the players.


{kind=link}
{kind=link}
{kind=link}