1. Introduction
Energy consumption of battery-operated embedded systems is a central problem in mobile and pervasive computing applications. Energy-harvesting (EH) sources can be employed to increase the lifetime of devices and ensure long-term operativeness [
1,
2]. A significant number of research works have been proposed to gather energy from renewable sources from the nature (e.g., sun, wind, water) or from other types of sources related to human activities (e.g., human walking, radio frequency fields, high-frequency vibrations) [
1,
3]. Indeed, by means of careful design, the so-called
energy-neutral operation mode (i.e., the working point where the amount of energy scavenged from the environment and the quantity of energy consumed by the device match) can be achieved to sustain the device activities [
4].
However, several research challenges need to be tackled to support the design of EH-based networked embedded systems. In fact, the complex interplay between the unpredictable nature of EH sources and the devices to be powered represents a critical issue for accurate testing. Load impedance of the supplied device is in fact subject to frequent changes because of dynamic power management policies that drive the microcontroller units (MCU) or the radio transceiver units to enter/exit to/from different power states, or because of requirements imposed by an event-based application; moreover, wireless communication environment can further exacerbate this scenario, modifying the workload by effect of interference and packet overhearing in an unforeseeable way.
As a consequence, experimental testing of systems that exploit EH sources is particularly hard because of the difficulty of reproducing, up to an acceptable degree, realistic operating conditions. Emulating the behavior of given renewable sources through ad hoc hardware-software systems is nowadays considered an option, alternatively to simulation (which trades off reproducibility and ease of parameter space exploration for accuracy) and to testbeds (which offer realistic experimental environment at the cost of low reproducibility and scalability) [
5].
Research works have recently introduced different solutions (like [
5,
6,
7,
8,
9]) that enable, to different extents, the emulation of EH sources. Emulation platforms may be classified according to their: (i) accuracy (i.e., the capability of reproducing with precision a given energy trace); (ii) latency (i.e., how the emulator is able to quickly react and adapt to dynamic changes); (iii) possibility of supporting multi-source emulation; (iv) power consumption; and (v) cost and form factor.
The emulation platform that we target in this study is the embedded hardware-software solution introduced by Lattanzi et al. in [
6]. The system controls the voltage supplied to the load through a feedback mechanism that continuously measures the load current; the measurement is sent to a micro controller unit (MCU) that dynamically adjusts the voltage to be applied according to a specific mathematical model describing the current–voltage characteristic relation for the specific energy source. Given that an error is introduced because the load current is achieved indirectly by measuring the voltage drop across a sensing resistor, a software-based correction was introduced by the authors [
6].
The latency of the emulator depends on the time required to execute the instructions that update the values applied to the load, which has to be summed to the time spent in all the remaining steps of the emulation flow. Although the average latency of the whole system has been evaluated empirically to be around 172
s [
6], this performance level could potentially impair real-time performance, especially in conditions characterized by fast temporal dynamics. To improve the capability to react to quick changes and, as a consequence, to decrease delays, a compensation circuit that implements in hardware the error-correction logic of the software has been introduced in [
5].
In this work, we aim, in particular, at discussing and evaluating some distinguishing features of the emulation platform proposed in [
5,
6]. In particular, the circuit in charge of implementing the above-mentioned compensation is based on a positive feedback loop, which could potentially result into instability. Previous work has experimentally characterized the main properties of the emulator, like accuracy and latency under different conditions (namely a switching resistive load and a wireless sensor node). Despite these experiments not providing any evidence of unstable behavior, the stability of the system remains a property worthy of being formally proved and/or experimentally investigated, which motivates our present work.
The main contributions of this work can be therefore summarized as follows: (i) we analyze the theoretical stability of the embedded emulator under a variety of possible working conditions (namely, for different types of load impedance);
(ii) we present experiments aimed at validating the formal analysis conducted and at providing evidence of the stability of the emulator when used to power a wireless sensor node representative of realistic working conditions.
The article is organized as follows: in
Section 2, we summarize the main related contributions in the scientific literature; in
Section 3, we describe the architecture of the embedded emulator taken as reference for our study; in
Section 4, we derive formal proofs of stability of the system under different load impedance conditions; in
Section 5, we introduce the experimental set up adopted to test the proposed platform; in
Section 6, we illustrate and discuss experimental results that highlight some specific stability properties; we conclude the article in
Section 7, by drawing some final considerations.
2. Related Work
Current state of the art in the emulation of energy sources targeting wireless sensor networks is a relatively novel line of research. Main contributions have been presented regarding systems devoted to the emulation of batteries or solar cells. Only a few proposals have tackled the challenge of designing emulators supporting a variety of energy sources, while being suitable for large scale deployments.
Chou et al. proposed a battery emulator, called B#, working in the
V operating range, with up to 800 mA maximum current [
9]. The emulation platform is remotely controlled by a desktop computer which takes the current drawn by the system to be powered as input, and it computes (through a look-up table) the corresponding voltage to be delivered, according to a simulator for lithium-ion battery cells, namely the Dualfoil electrochemical simulator [
10]. The voltage is imposed thanks to an adjustable linear regulator. Li and Chou further developed the B# architecture by including a module to allow the emulation of a solar panel. This platform, termed S#, could support both emulation and simulation functionalities [
11]. Particularly, when running as simulator, S# takes as input the current profile of the load to be powered and the irradiance trace, and it computes a simulated power profile on board of the host computer; in emulation mode, a real load is powered by the S# emulation circuit through a microcontroller which stores in memory a solar model to be used for generating at run-time the voltage to be applied to the load. The same type of approach has been pursued in other works, which entail the emulation of solar panels by means of desktop-level computers equipped with sophisticated acquisition and processing software (i.e., LabView
, National Instruments, Austin TX, USA) [
12,
13].
Bobovych et al. introduced SunaPlayer, an emulator of photovoltaic cells with capability of emulating nonlinear models of solar panels thanks to the adoption of final circuit stage based on a Darlington transistor [
7]. The platform can be battery-operated; it supports output currents from 430
A up to
A, and output voltages from
V to
V. The system relies on a microcontroller in charge of selecting the suitable working point (i.e., the voltage value to be applied through the Darlington-transistor stage) among several stored I–V curves. The overall emulation process has been demonstrated to be rather accurate (around 99%), at the cost of a significant latency, which can reach 10 s.
Regarding photovoltaic sources, we could also mention some examples of high-power emulators, mostly targeting industrial applications with delivered power levels up to 3 kW [
14,
15].
In the context of wireless sensor networks applications, the Ekho platform represents a solution for emulating generic energy sources with reduced output currents [
8,
16,
17]. The current–voltage relation (expressed as an I–V curve) of the energy source is recorded in Ekho by means of an acquisition instrument, and is replicated by means of a dedicated board entailing a capacitor (to power the load), and a sensing resistor is used to estimate the supplied current. The working point of the I–V curve is computed at run-time to apply the corresponding voltage value. The accuracy of the system has been measured to be around 77.4
A (for emulating solar panels) and 15
for kinetic sources. Latency was estimated in
ms.
De Mil et al. presented a simulation/emulation framework for generic energy sources composed by a harvesting device and an energy buffer (i.e., a capacitor). Both elements are implemented in software, and the voltage drop across the buffer is computed according to a static model and subsequently applied through a digital-to-analog conversion in cascade with a voltage follower. Neither accuracy nor delay performance have been investigated by the authors.
Lastly, it is also worth noticing that emulating a generic energy source can be done in principle by means of programmable power supply devices. Although there are notable examples of systems offering accurate measurement and flexible programmability, they are expensive and typically bulky, which prevent their adoption on a large scale network of embedded systems.
Lattanzi et al. designed a hardware-software embedded system that overcomes some of the limitations of these works [
5,
6]. In particular, the emulation platform features low-power consumption, small form factor, and reduced cost, and has been demonstrated capable of achieving good levels of accuracy with tight latencies that make it compatible with real-time applications. This performance level is obtained thanks to a novel design point based on a compensation logic (to enhance the accuracy in the energy trace reproduction) that has been implemented in hardware (to reduce the delay of the emulation chain). The compensation, introduced to adjust the voltage applied by the emulator of a quantity corresponding to the voltage drop across the sensing resistor (used to indirectly measure the load current), implements, however, a form of positive feedback potentially prone to unstable behavior.
Since none of the previous works has investigated the stability of the emulation process, we aim in this article at filling this gap by further characterizing this type of platform and by providing novel insights on its applicability contexts.
3. System Architecture
The reference system covered by this study is the energy harvesting embedded emulator presented in [
5,
6]. The emulator controls the voltage and the current supplied to the powered device by real-time computing a mathematical model representing the emulated energy harvester. The emulator architecture is based on a MCU equipped with analog-to-digital (ADC) and digital-to-analog (DAC) converter channels which allow it to sense and to react as a real energy source. In particular, the main idea on which the system is based, is to continuously measure the current supplied to the load, by means of an ADC, and immediately impose the right voltage output to the load using a DAC. The value of the voltage to be generated is obtained by solving the mathematical model of the emulated source. To better understand the operation of the emulator, we report, in
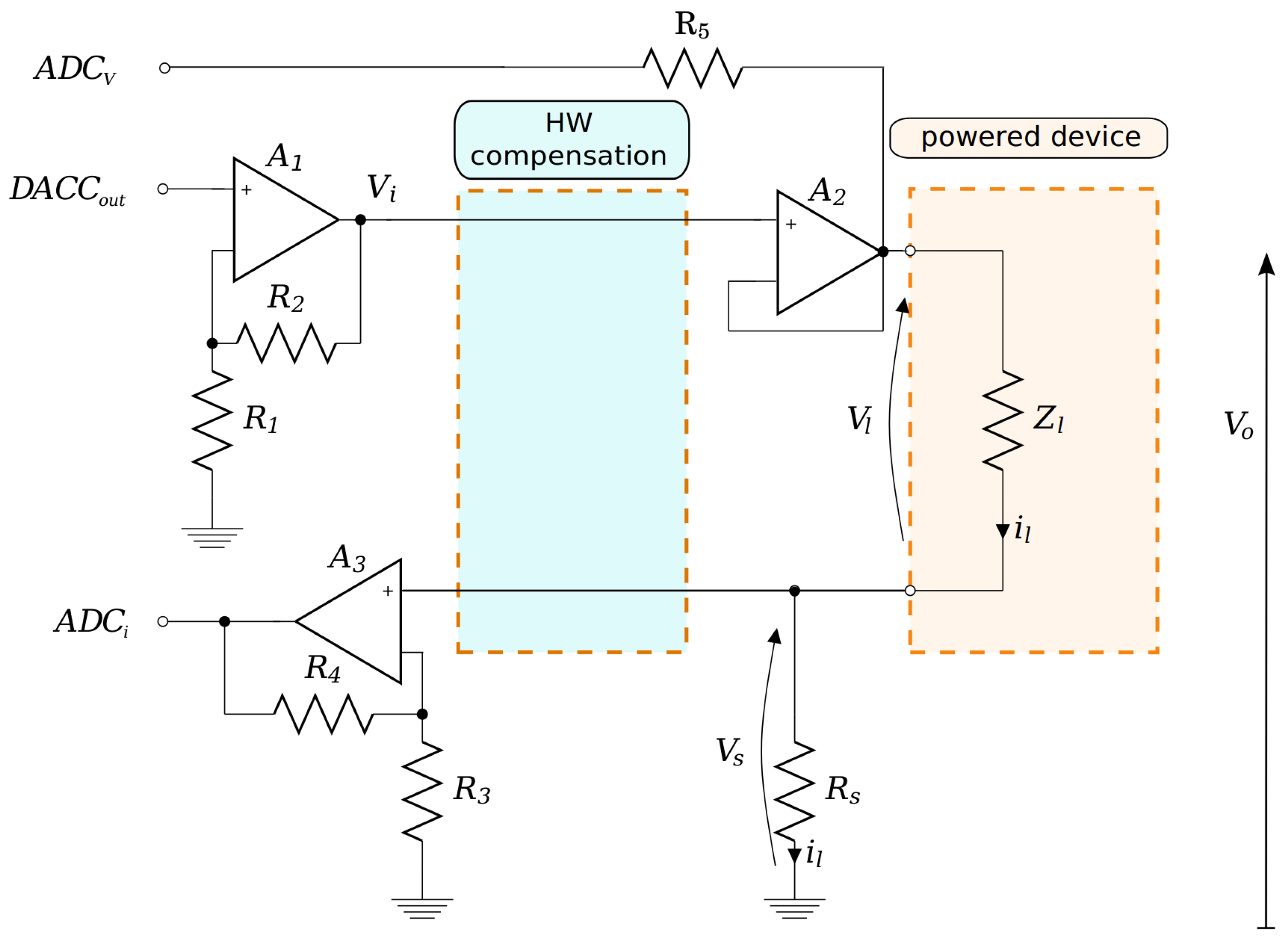
Figure 1, the basic schematic of the interface between the electric load (the device to be powered) and the MCU in charge of controlling the emulation.
The load, which can be a low-power device such as a sensor network mote, is represented in the circuit by a dashed rectangle containing the impedance . The emulator MCU controls the supply voltage by means of the channel coupled to the load through two cascade blocks that make use of the operational amplifiers and .
The first amplifier block which contains , , and , is used to boost the output of the DAC of the MCU into a voltage range suitable for the load device characteristics. The second block is composed of operational amplifier in voltage follower configuration, in order to provide the required decoupling between the DAC output circuit and the load.
The current drawn by the load () is a function of the supply voltage () and of the load impedance , and it is indirectly measured by estimating the voltage drop across the resistor. This resistor is placed between the load and the ground and is used by the MCU as an input of the mathematical model describing the energy harvester, in order to calculate the right value of the voltage to be supplied to the powered device.
An amplifier stage, composed of , , and , amplifies the voltage in order to match the ADC working conditions before carrying it to the channel which performs the digital conversion. A second ADC channel, namely , is used to monitor the value at the output of the voltage buffer for debugging purposes.
The sensing resistor
introduces a reduction on the voltage supplied to the load with respect to the nominal value imposed by the emulator (i.e., the amplified DAC signal) according to the EH model. The hardware compensation mechanism, based on an analog circuit, boosts the voltage set by the DAC channel of the MCU by a quantity equal to
. This hardware based mechanism dynamically and automatically counterbalances the voltage drop caused by the sensing resistor, with beneficial effects in terms of reactiveness of the emulation.
Figure 2 reports the schematic diagram of the emulator encompassing the hardware compensation components (enclosed within a shaded polygon). The compensation stage is built around an operational amplifier (
) working as voltage follower and an operational amplifier (
) in summing configuration (with resistors
,
,
,
). The voltage follower decouples the sensing resistor from the adder which sums the voltage value
to the voltage output set by the DAC. The sum between the voltage signal from the DAC channel and the voltage signal across the sensing resistor is finally buffered thanks to the voltage follower based on
.
4. Stability Analysis
To derive some results regarding the stability of the embedded emulator under study, we first identify its building blocks, and how they are logically interconnected. Referring to the circuit schematic depicted in
Figure 2, the hardware compensation circuit (highlighted by means of the shaded polygon) is based on the following components:
Input (): the voltage difference (w.r.t. to the common ground reference) provided by the DAC and properly amplified (through , , ).
A summing junction implemented through the circuit composed of and , , , , .
A subsystem encompassing: the voltage follower implemented by means of and the load, characterized by an impedance .
A subsystem implementing the feedback from output to input encompassing: the sensing resistance and the voltage follower implemented by means of .
: the voltage difference at the sensing resistor .
Output (): the sum between the voltage difference on the load and the voltage difference on the sensing resistance ().
Since voltage followers provide impedance decoupling with unitary gain, the load
and
act as a voltage divider block, and a positive feedback is implemented at the summing junction, the relationship between
and
can be written as:
leading to:
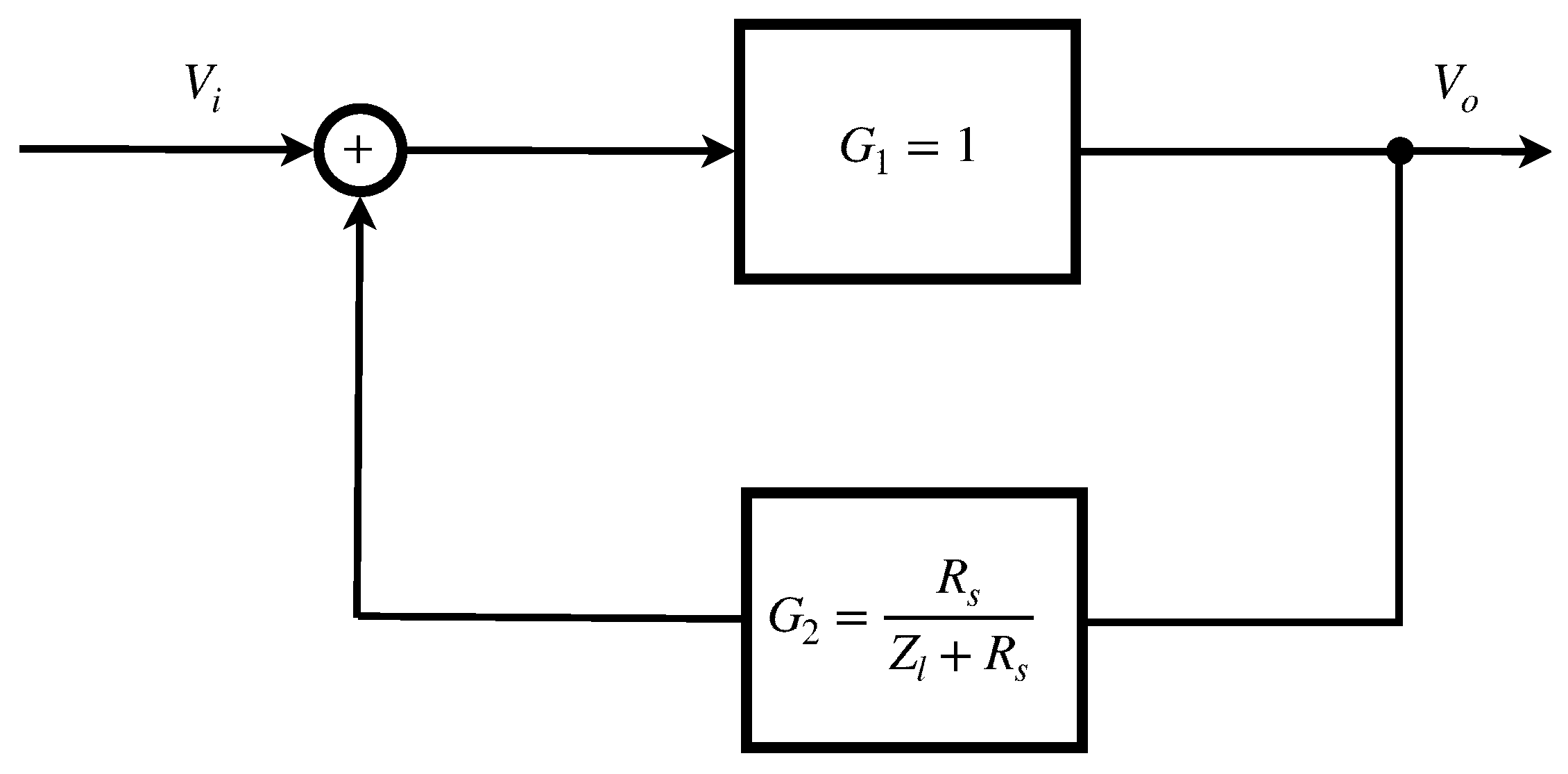
Overall, the above described circuit can be studied as a dynamical system, whose block diagram is depicted in
Figure 3. In this system, we can identify two sub-systems (
and
) that are interconnected by means of a positive feedback loop. Their transfer functions can be written, respectively, as
and
.
From Equation (
1), and from the analysis of
Figure 3, the transfer function of this system can be written as:
By studying how Equation (
2) varies as a function of its independent variables, we can characterize the system and its stability. In particular, we conducted the theoretical analysis for three types of load representatives of realistic operative scenarios, specifically: case study 1 corresponds to a purely resistive load; case study 2 is related to a load composed of a resistance placed in series with a resistance-capacitance (RC) parallel circuit; case 3 considers a load impedance resulting from an inductance placed in series with an RC parallel circuit.
Table 1 summarizes the analyzed load types and results (a symbolic notation is used to denote a series (+) or a parallel (
) connection between electric components).
Case 1:
The transfer function reported in Equation (
2) can be written as:
Since it is a constant value (for constant sensing and load resistances), bounded input implies bounded output, and the system is stable [
18,
19].
Case 2:
Load impedance
can be expressed as:
where
Poles of this instance of
can be derived by imposing
, leading to
; since this represents a single pole with real part
, we can derive the stability of the system [
18,
19].
Case 3: Load impedance is given by the following:
Replacing the corresponding term in Equation (
2) leads to:
The characteristic equation (i.e., the denominator of H(s)) can be studied to apply Routh criterion. To this aim, the Routh table reported in
Table 2 can be built and, from its analysis, we can state the permanence of sign in the second column, from which the demonstration of the stability of the system immediately follows [
18].
5. Experimental Set-Up
The emulator has been tested in four different configurations of the connected load, namely:
Cases 1, 2, and 3, corresponding to the three configurations analyzed in
Section 4 and in a fourth configuration (denoted as
Case 4) where the emulator load was a real VirtualSense WSN node [
20]. Off-the-shelf discrete components that were used for the experiments take the following values:
Case 1: .
Case 2 , .
Case 3, , , .
During the experiments, the emulator was powered at 12 V by a NGMO2 Rohde & Schwarz dual-channel power supply (Rohde & Schwarz, Munich, Germany) and the digital waveforms were sampled by means of a National Instruments NI-DAQmx PCI-6251 16-channel data acquisition board (National Instruments, Austin, TX, USA) connected to a BNC-2120 shielded connector block (National Instruments, Austin, TX, USA) [
21,
22,
23].
6. Results and Discussion
To experimentally investigate the stability of the compensation mechanism installed on the emulator, we conceived a set of synthetic tests aimed at creating an almost instantaneous perturbation on the working condition in order to evaluate the system dynamic response. A second set of experiments has then been conducted to investigate the system stability under realistic working conditions.
6.1. Synthetic Benchmarks
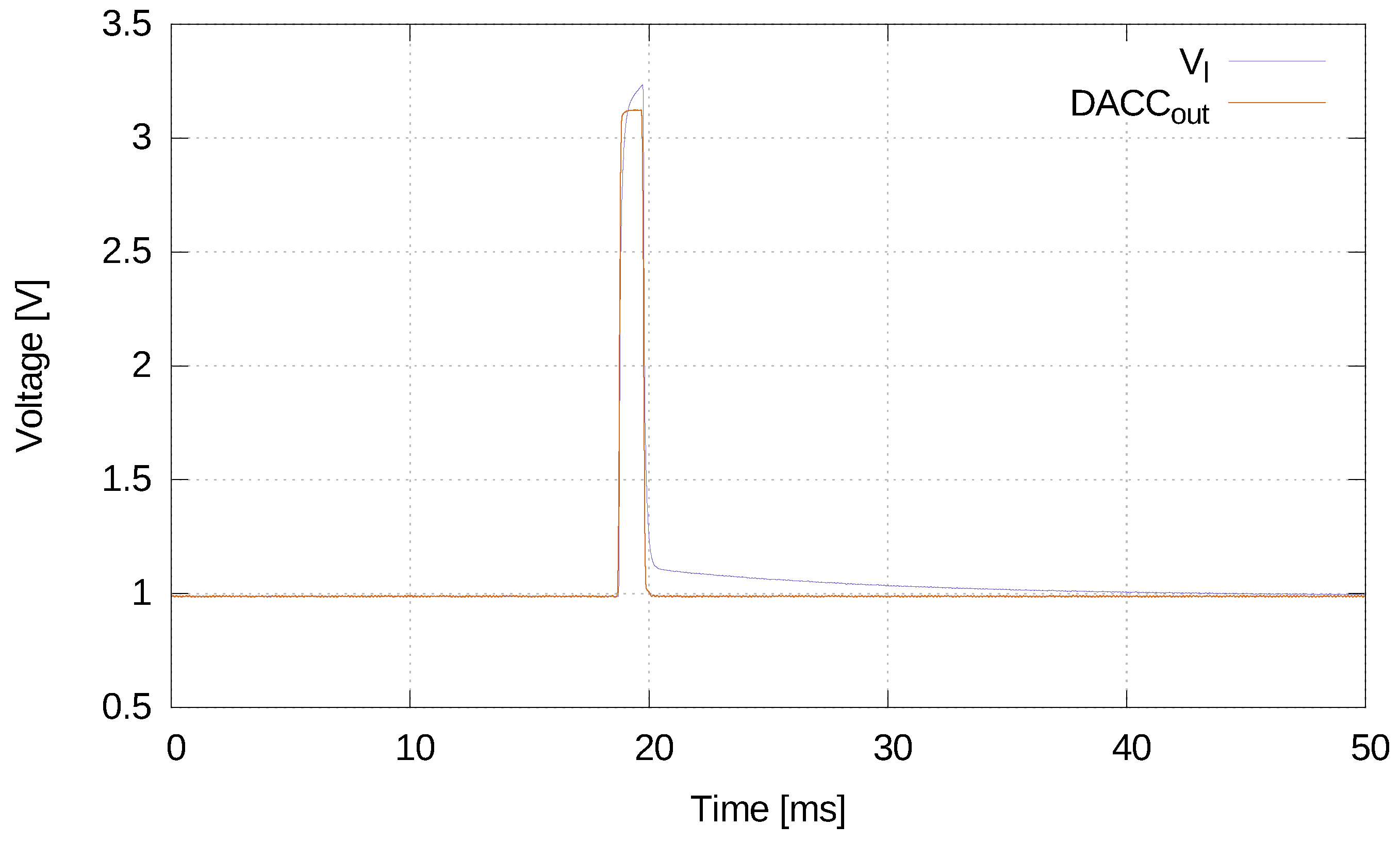
The instantaneous perturbation has been generated by programming the DAC of the emulator to generate a square pulse on the
channel. The pulse lasts one millisecond and raises the output voltage from
to
V and the back to 1 V. In this experiment, the rapid increase of the supply voltage leads to a growth of the current drawn by the load (
), which, in turn, decreases the voltage supplied (
). The compensation mechanism reacts by boosting the
to restore the imposed output (i.e.,
V) and, when the
level goes back to the initial value, the delay of the compensation mechanism causes a measurable over-voltage on the output level that lasts for several milliseconds. This perturbation has been applied to each load configuration described in
Section 5 ( 1, 2, 3, and 4) and the waveforms of the
and of the
signals have been collected and analyzed.
Figure 4 shows the sampled waveforms of the
and of the
signals during the impulse perturbation when a type-3 load was connected. For the sake of simplicity, relative to the output signal, we call
Peak the first part of the disturbance that follows more or less faithfully the input signal, while we call
Compensate the part of the residual disturbance which gradually disappears and which is strictly related to the compensation mechanism. The
traces have been processed by means of Matlab
environment (R2017b, MathWorks, Natick, MA, USA) in order to detect and measure each peak component.
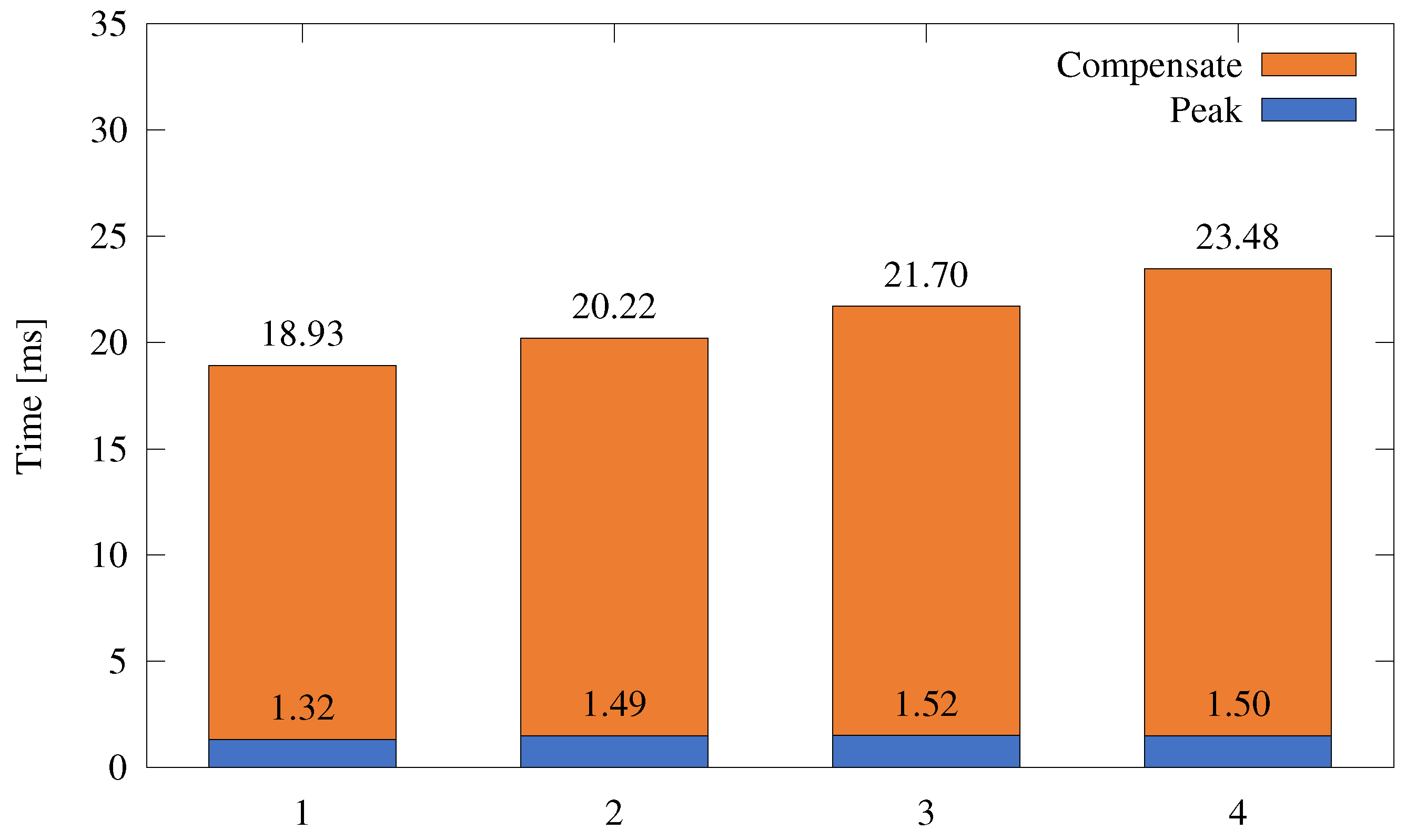
Figure 5 reports the time width of the
Peak and of the
Compensate part of the
disturbance, obtained after a
pulse, when the emulator was powering loads in cases 1, 2, 3, and 4. During each experiment, no evidence of unstable behavior has been found, but a slight correlation of the duration of the over-voltage phase with the complexity of the connected load has been highlighted. In particular, in the simple
Case 1 load configuration, the average value of the
Compensate phase was
milliseconds, while, in
Case 2 and 3 configurations, it was respectively
and
milliseconds. The largest value of about
milliseconds has been obtained when the emulator was powering a real sensor mote (
Case 4 configuration). On the other hand, the width of the
Peak phase is only marginally affected by the load variation so that it ranges from about
milliseconds in 1 to about
milliseconds when powering a real sensor node.
A second set of experiments has been carried out to more deeply investigate the response of the system to a rapid impulse. In particular, the pulse magnitude imposed on the
was varied between 0.2 and 2.2 Volts and the induced over-voltage phase has been characterized.
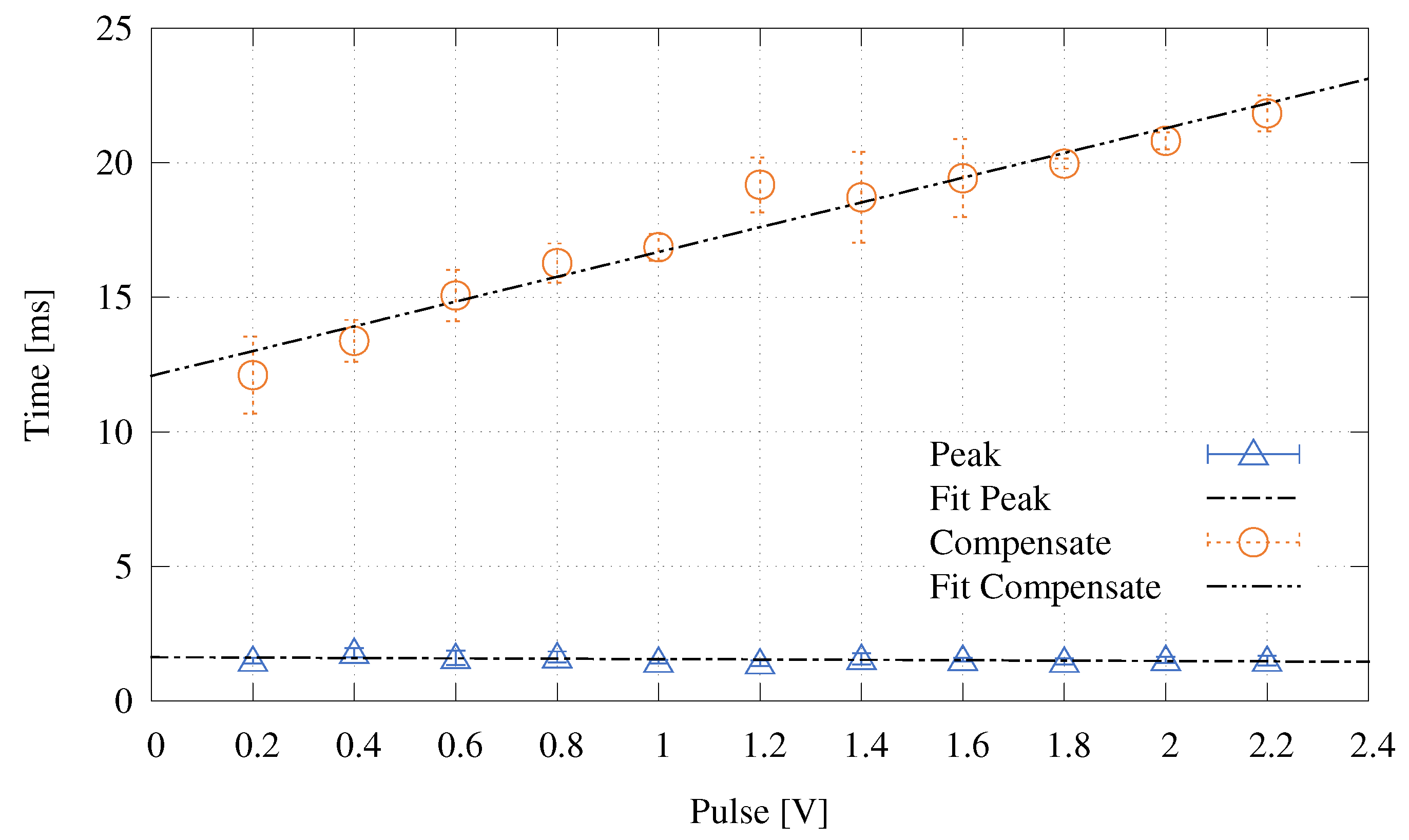
Figure 6 shows the width of the
Peak and of the
Compensate phases measured while the pulse magnitude was increased. Interestingly, the width of the
Compensate phase shows a strong linear dependence on the pulse magnitude while the width of the
Peak remains almost constant.
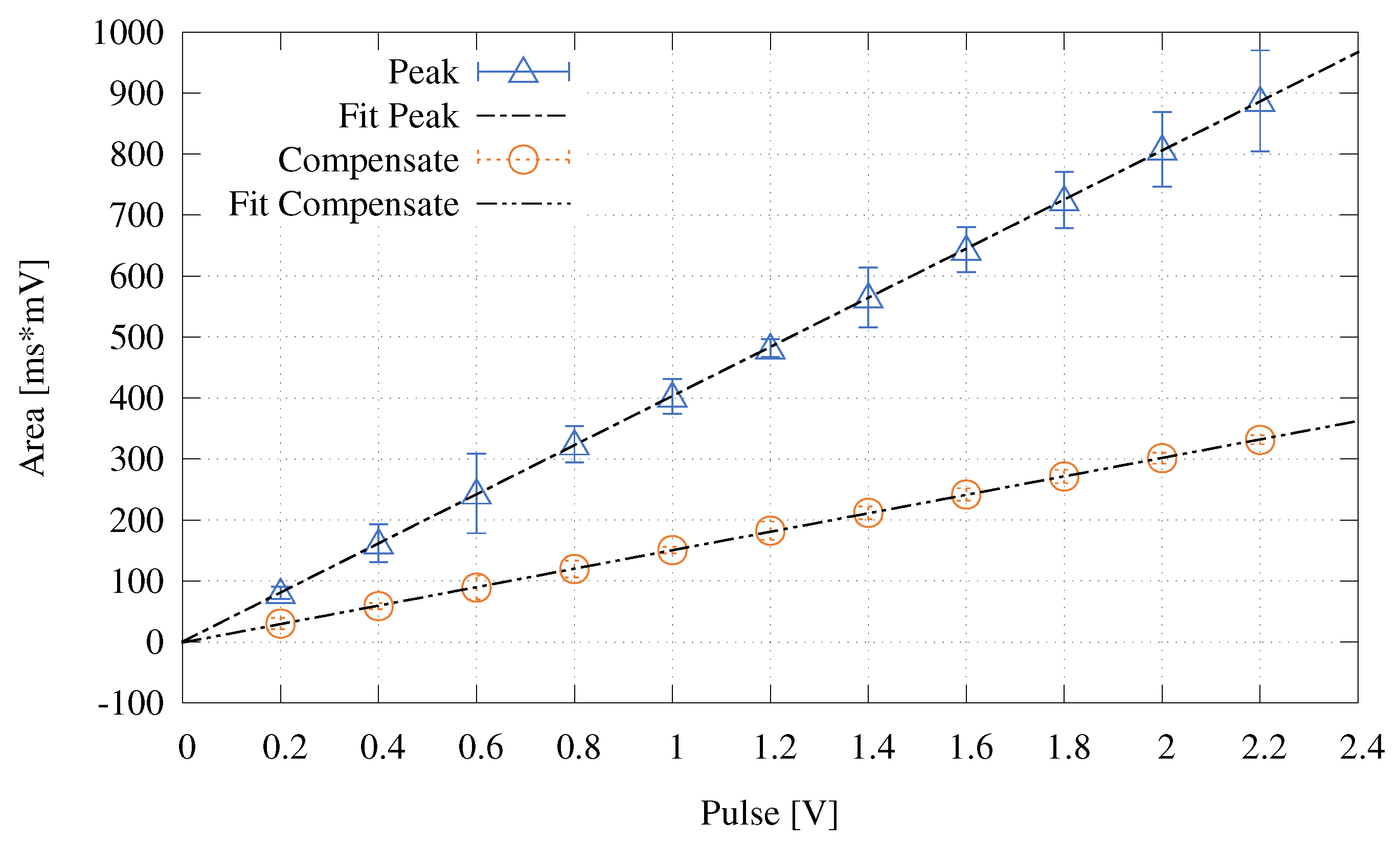
Figure 7 reports the area of the
Peak and
Compensate phases when increasing the pulse magnitude. In this case, the dependence on the magnitude of the pulse is strictly linear for both phases even if they show a different slope. In addition, in this set of experiments, the system was always stable, confirming the theory described in
Section 4.
6.2. Typical Sensor Node Task
Once the stability of the system to an artificial impulse has been proved, we carried out several experiments in realistic scenarios. In particular, a frequent working condition for an energy harvester emulator is to power a sensor node equipped with a low-power microcontroller. Modern System on a Chip (SoC) microcontrollers normally alternate their operating conditions between several states, with different power consumption, depending on the activity they are carrying out (i.e., sensing quantities, processing data, sending packet wirelessly, etc.). These state transitions are almost instantaneous and cause a rapid change on the applied load, with a consequent rapid change in the current supplied by the emulator (). This entails a rapid need to compensate for the voltage applied to the sensor node () which, potentially, can cause unstable dynamics.
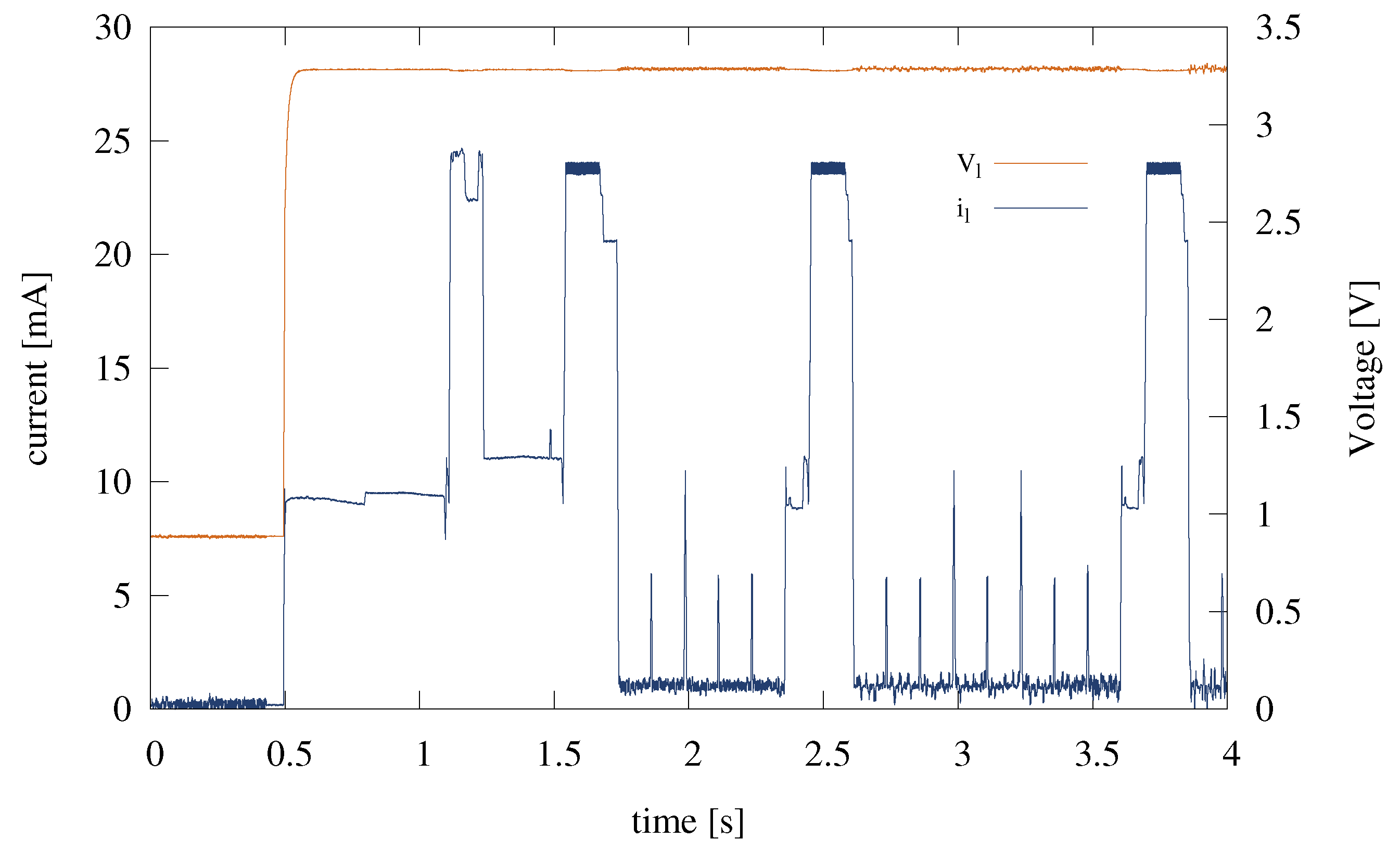
Figure 8 shows the
waveform (red line) sampled at 100 kHz while powering a VirtualSense node together with the
trace (blue line) representing the current drawn by the sensor. At 0.5 s, the emulator starts powering the sensor by setting the
to its working conditions (i.e., 3.3 Volts). Consequently, the node boots the operating system (from 0.5 to 1.5 s) and then starts its main task. In this experiment, the only task installed on the node was periodically sending a broadcast packet containing 100 bytes by means of the ContikiMAC radio duty cycling protocol. In the current trace, a high power consumption phase (about 24 mA) corresponds to each transmission, lasting about 300 milliseconds, followed by a low power phase (about 1 mA), which lasts until the next packet is sent. The low power phase is, in turn, periodically interrupted by a rapid spike in the power consumption due to the Channel Clear Assessment (CCA) performed by the ContikiMAC protocol to probe the channel occupancy.
As proof of the stability of the compensation system, it is possible to note that, although state transitions are almost immediate, the value of imposed by the emulator is perfectly constant, and it does not show any unstable dynamics.
7. Conclusions
Emulation of energy harvesting sources represents an interesting solution in the design and test of networked embedded systems. In particular, when applied to gain knowledge on the behavior of systems composed of low power devices, it potentially enables experimental validations in a reproducible and realistic way.
In this article, we presented a study aimed at evaluating a hardware-software solution recently proposed in scientific literature. The analyzed system is built around an embedded ultra-low power platform targeting low-cost and small form factor. Moreover, it has been demonstrated as being capable of guaranteeing good levels of accuracy when reproducing the response of an energy harvester, with latencies compatible with real-time requirements. Since the reduced delay performance is obtained thanks to a hardware compensation mechanism implementing a positive feedback loop, it is interesting to investigate its stability, which is the focus of this work. In particular, we analyzed how the system stability depends on the type of powered load by proving theoretical stability results under several scenarios, and we also experimentally tested the dynamics of the platform in realistic frameworks.
Overall, the presented results demonstrate the theoretical stability of the system in a wide range of possible set-ups, and provide evidence of the capability of the emulator to react to sudden changes of its operating conditions (for instance because of modification of the load impedance) without driving its dynamics towards unstable regimes.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}