
Simulation-Based Development of Internet of Cyber-Things Using DEVS




Abstract
1. Introduction
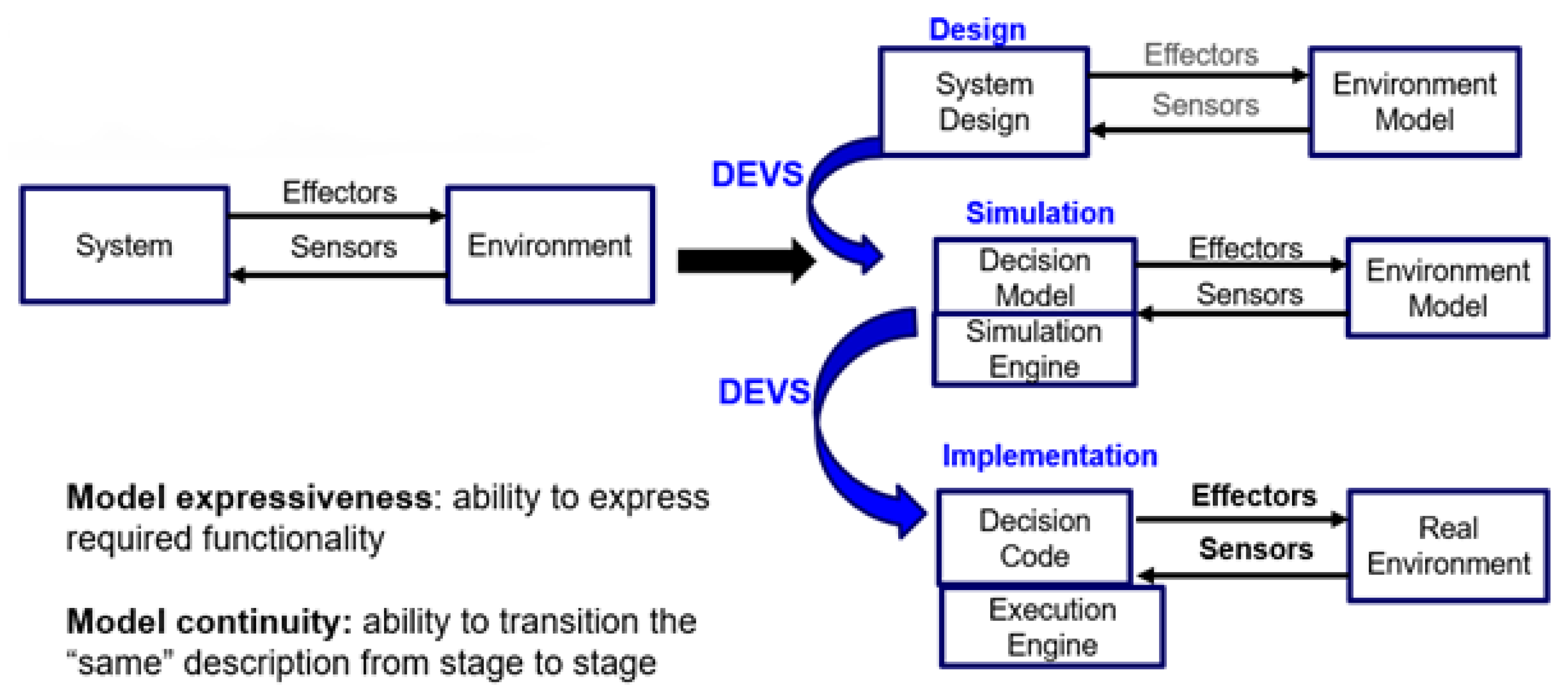
- Model expressiveness, which refers to the ability to represent complex system behaviors, including hybrid dynamics that combine discrete and continuous processes. It also includes support for modularity and incremental model refinement.
- Model continuity, which ensures that the same model can be used consistently across the design, simulation, and implementation stages, with minimal modification. This is particularly important for preserving timing accuracy and behavioral fidelity in real-world deployments.
2. Background and Related Work
3. A Unified DEVS-Based Methodology for Expressive and Continuous IoCT Design
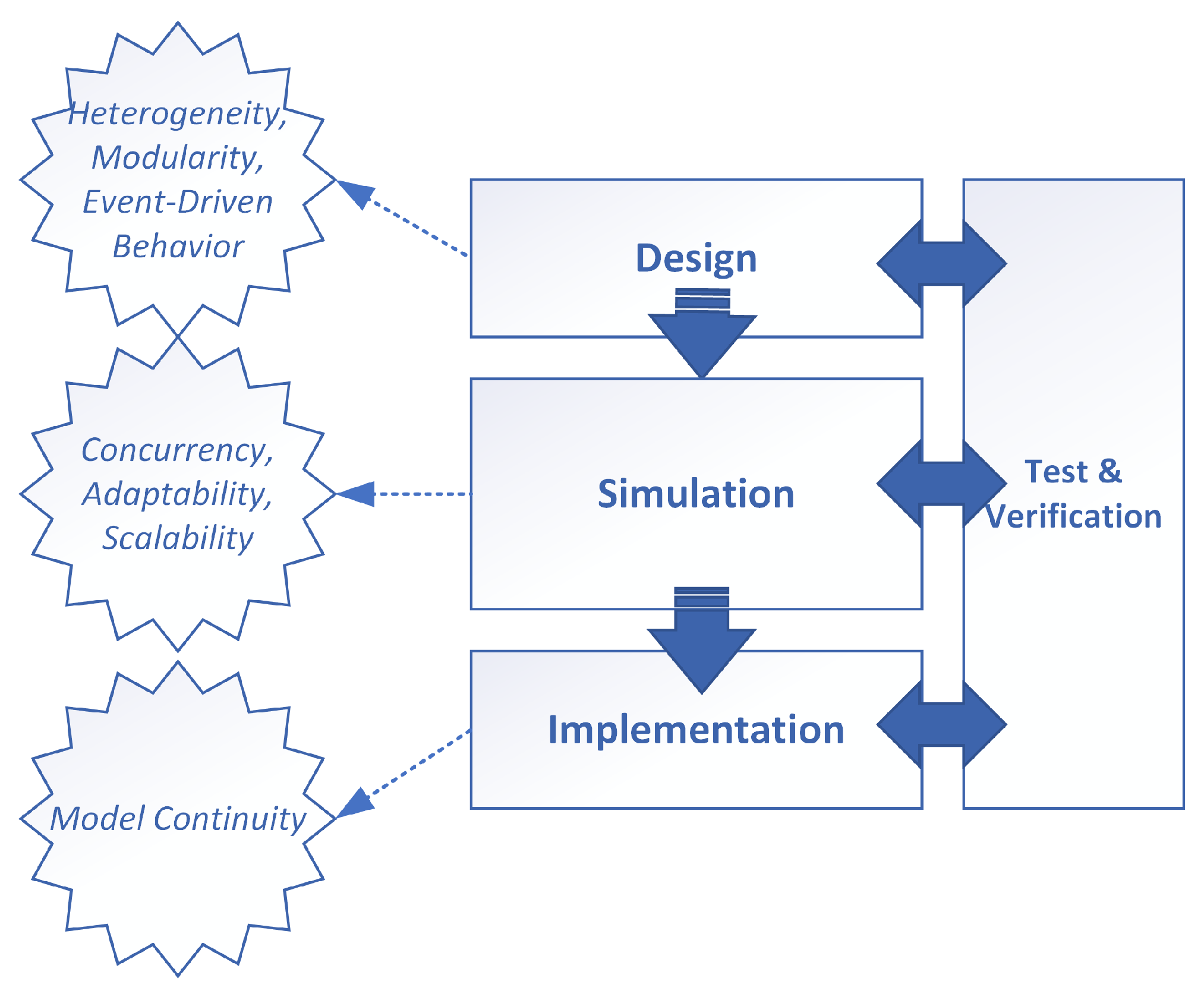
- Heterogeneity: IoCT systems include a wide variety of devices, sensors, and actuators, each using different communication protocols, data formats, and processing capabilities. A suitable modeling formalism must be flexible enough to represent this diversity and ensure smooth interaction between all components.
- Real-Time and Event-Driven Behavior: Many IoCT applications require immediate responses to sensor data. For instance, a smart thermostat must react quickly to temperature changes, and a traffic control system must process sensor inputs in real time to manage vehicle flow efficiently.
- Concurrency and Synchronization: IoCT systems often involve multiple devices operating at the same time. These devices must coordinate their actions to avoid conflicts and ensure that the system behaves as expected. A modeling approach must support concurrent execution and synchronization mechanisms.
- Adaptability: IoCT environments are dynamic—devices may fail, new ones may be added, or network conditions may change. The modeling formalism must support flexible structures that can adapt to these changes without requiring a complete redesign.
- Scalability: As IoCT systems grow, the modeling approach must allow for the addition of new components without compromising performance or stability. This is essential for systems that evolve over time or are deployed at large scale.
- Model-to-Execution Continuity: A model should remain consistent from the design phase through simulation and into real-world deployment. This ensures that the behavior tested during simulation is preserved when the system is implemented.
4. Case Studies and Applications
4.1. Home Automation
4.2. Solar Monitoring
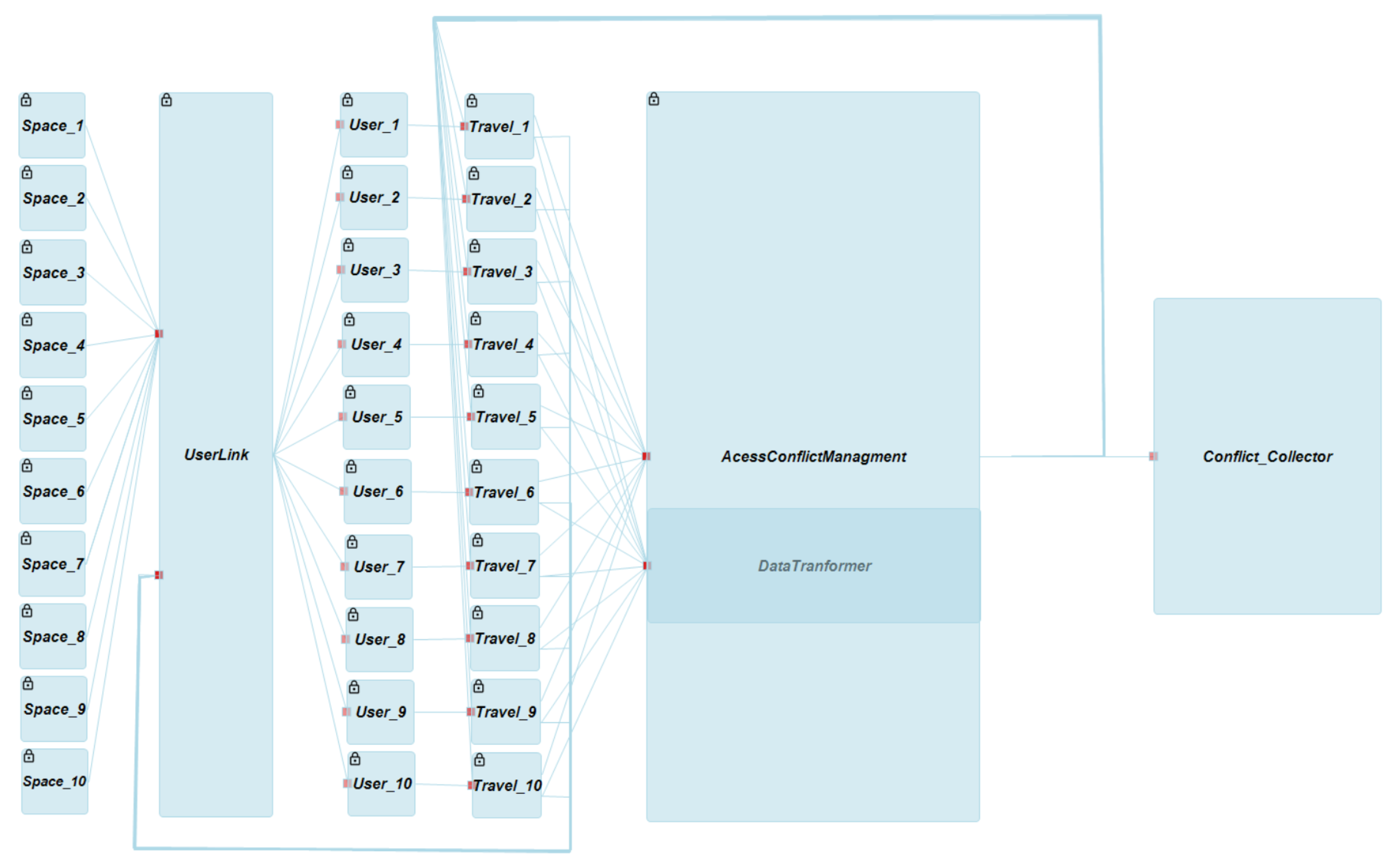
4.3. Actuation Conflict Management
- Model Validation: This level assesses the impact of conflict resolution on the environment using DEVS simulation. The ACM DEVS model incorporates timing properties (e.g., event delays and state durations) to accurately capture system behavior.
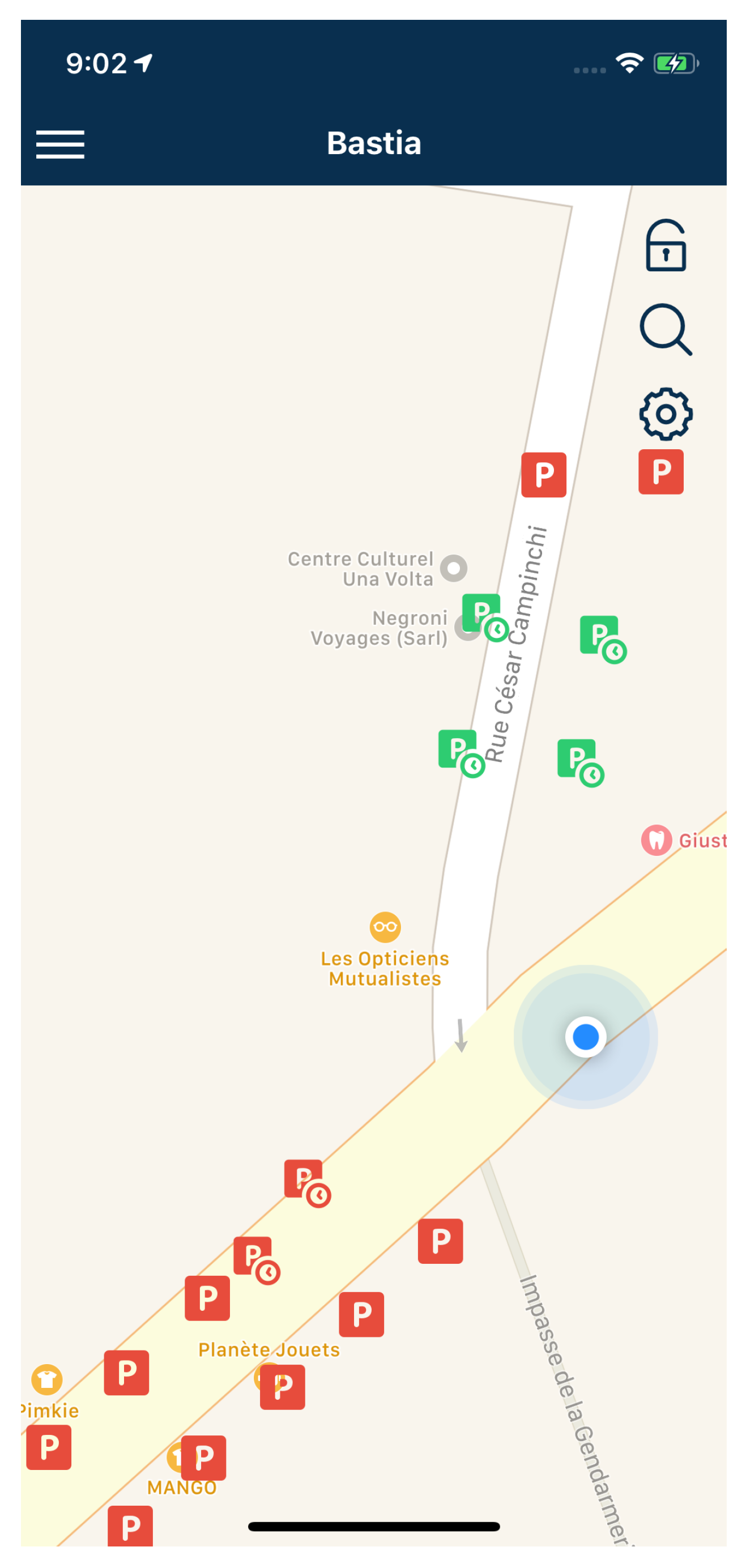
4.4. Smart Parking
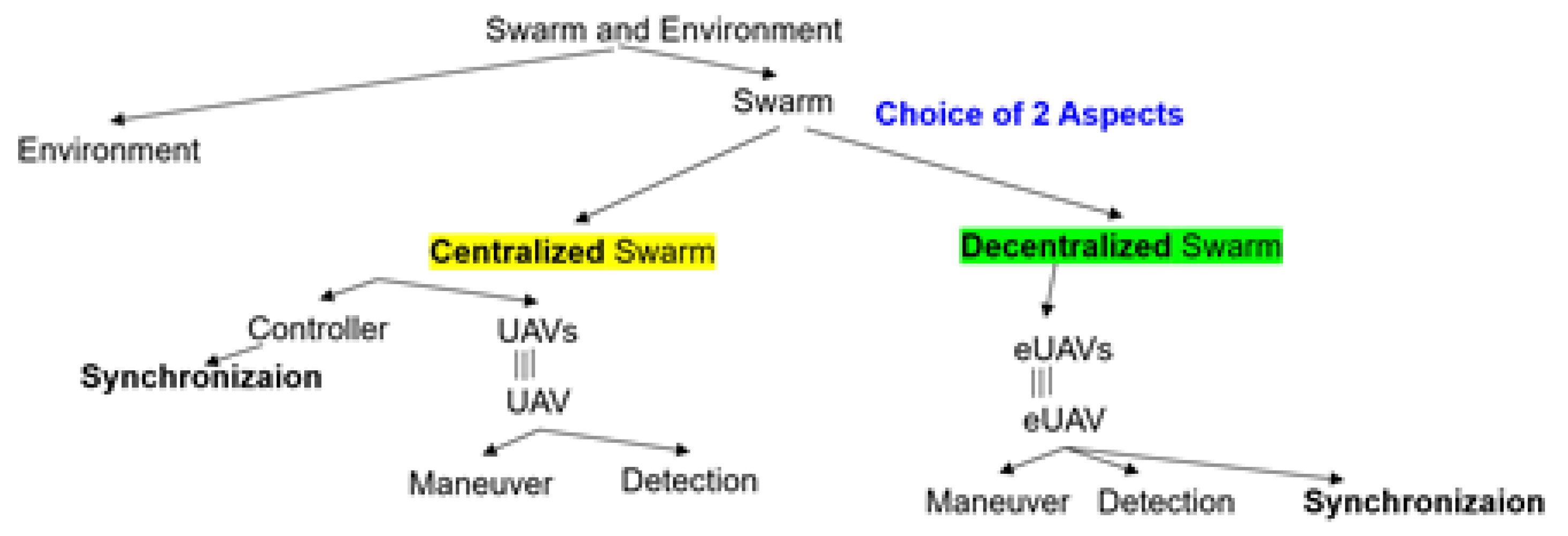
4.5. Swarm Systems
4.6. Cyber-IoT Integration in IoCT
5. Discussion
5.1. DEVS Properties for Model Expressiveness and Model Continuity
- Modeling of Asynchronous and Event-Driven Behavior: IoCT systems rely on asynchronous interactions among devices, sensors, and actuators. DEVS, as a discrete-event formalism, naturally represents systems where state changes occur at discrete time instants, making it well suited for capturing real-world IoCT dynamic [32]. It represents state changes at discrete time intervals, making it adept at modeling real-world dynamics in IoCT environments [33];
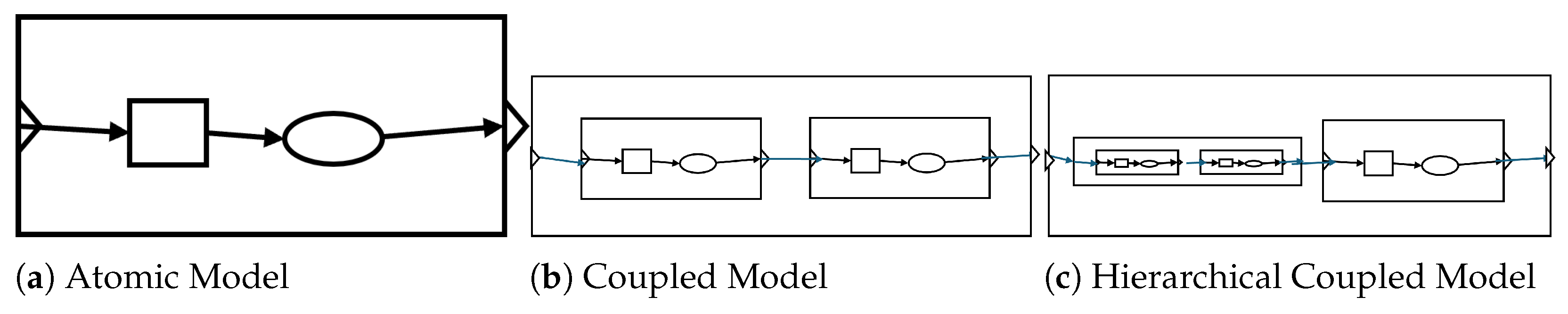
- Hierarchical and Modular Structure: DEVS enables hierarchical composition of models, allowing IoCT architectures to be designed in layers—such as edge, Fog, and cloud computing—while maintaining encapsulation and interoperability between components [34]. This modularity enhances the reusability of models across different applications [32].
- Separation of Concerns (Structure vs. Execution): IoCT systems often require separating functional behavior from execution strategies. DEVS achieves this through its atomic models (defining component behavior) and coupled models (specifying interactions and execution flow), providing a clear separation between computation and communication [35].
- Support for Concurrency and Synchronization: IoCT components often involve multiple interacting subsystems that require concurrent processing. DEVS inherently supports parallel discrete-event simulation (P-DEVS), making it suitable for modeling concurrency, synchronization mechanisms, and conflict resolution in distributed IoCT systems [36].
- Adaptability to Dynamic Environments: IoCT applications demand adaptability due to changing conditions and evolving requirements. Dynamic structure DEVS (DS-DEVS) extends DEVS by allowing on-the-fly reconfiguration, which is essential for modeling adaptive behavior in IoCT networks [37]. Adaptive decision-making frameworks, such as the one proposed by Wang et al., utilize layers that sense, decide, and execute actions based on dynamic conditions [38].
- Validation through Discrete-Event Simulation: A critical aspect of IoCT system design is verifying whether execution strategies remain conformant with the intended functional model while incorporating real-world constraints. DEVS provides a rigorous simulation-based validation framework, allowing designers to test control strategies, real-time constraints, and system reliability before deployment [37].
- Interoperability with Other Modeling Approaches: IoCT system design often integrates multiple modeling paradigms, such as synchronous automata, Petri nets, and state machines [39]. DEVS can coexist with and complement these models, making it a flexible bridge for heterogeneous system design.
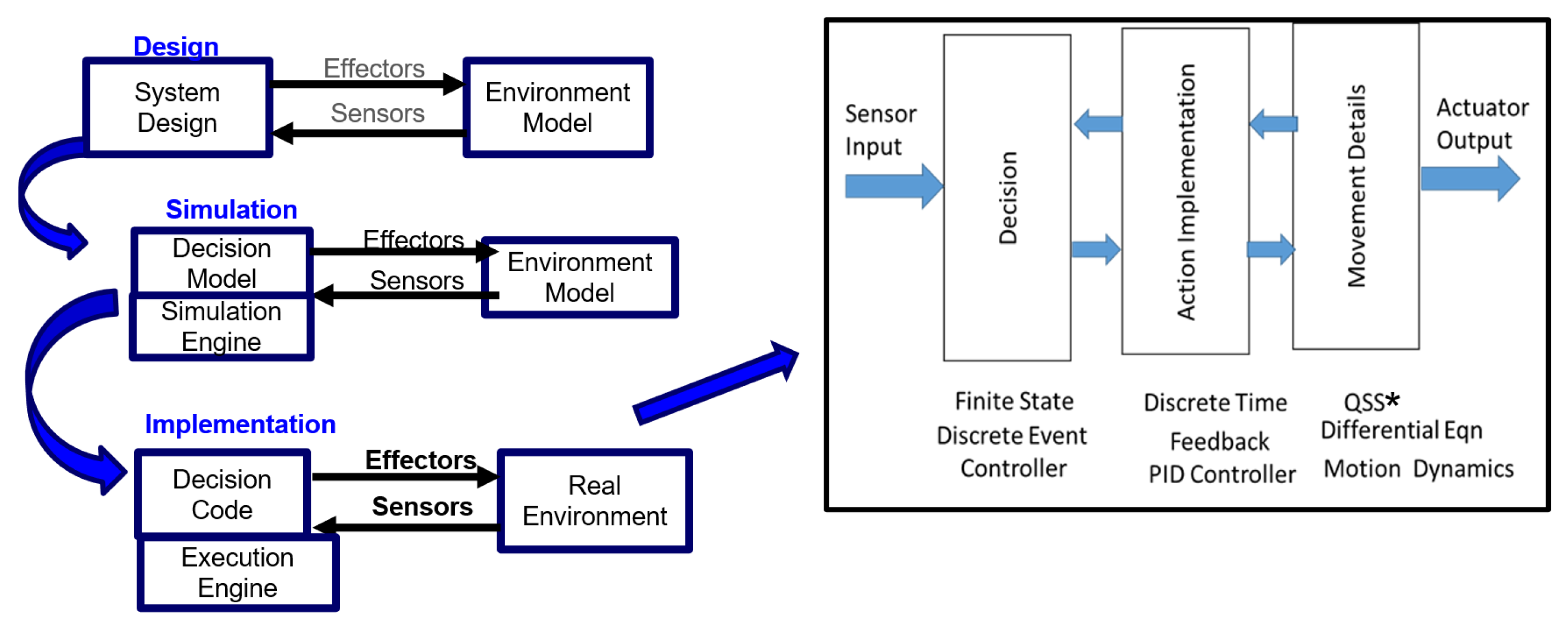
- Transition from Design to Simulation: DEVS provides a formal specification that allows IoCT models to be directly simulated without reinterpreting their structure or behavior. The same model used in design can be executed in a discrete-event simulation environment, ensuring that functional behaviors (e.g., message passing, event synchronization, and timing constraints) are validated early. The hierarchical and modular nature of DEVS allows developers to incrementally refine their models while preserving core behavioral properties. For example, IoCT system architects can design DEVS models representing sensor interactions, data aggregation, and processing logic and then test these models in a simulation engine before deployment.
- Transition from Simulation to Execution: DEVS enables migration from simulated environments to real-world execution by transitioning from abstract simulation time to real-time execution. DEVS models can be mapped to real-time platforms, ensuring that the timing, coordination, and decision-making behaviors observed in simulation are maintained during execution. Through real-time DEVS (RT-DEVS), the same IoCT models can be integrated into embedded systems, middleware, and cloud environments without major alterations. For example, a DEVS-based traffic monitoring system tested in a simulation environment can be directly deployed onto real-world IoCT infrastructure while maintaining its event-driven behavior [40].
- Support for Diverse Implementation Platforms: DEVS models can be executed across a wide range of hardware and software platforms, including (i) embedded systems (IoCT devices and microcontrollers), (ii) edge and Fog computing environments, (iii) cloud-based IoCT platforms, and (iv) distributed simulation frameworks [41]. This adaptability ensures that the same IoCT model can be scaled and reused across multiple deployment scenarios. For example, a DEVS-based smart grid model can be tested in a cloud-based simulation environment and later deployed onto real-time distributed IoCT systems while preserving model fidelity.
- Model Validation and Conflict Resolution: DEVS simulation helps verify and validate execution strategies, ensuring that an IoCT system’s operational behavior remains consistent with its design [42]. At the Operational Model level, DEVS supports conflict actuation management, helping resolve issues such as resource contention, sensor conflicts, and dynamic adaptation. For example, a smart building IoCT system modeled in DEVS can simulate conflicting temperature control settings before deployment, ensuring smooth operation.
- Dynamic Adaptation and Evolution: IoCT systems can reconfigure themselves autonomously, reducing the need for human intervention. This self-management is vital in complex environments, as highlighted in studies on self-adaptive software systems [43]. Through DS-DEVS, models can adapt to environmental changes in real time, allowing IoCT systems to be self-reconfigurable. This ensures that model continuity extends beyond initial deployment, supporting evolution and updates without requiring full redesigns. For example, an IoCT-based disaster response system modeled with DS-DEVS can dynamically adjust communication patterns and resource allocation in response to changing emergency conditions.
5.2. Comparison with Other Formalisms
5.3. Industrial Applications and Toolchain Integration
5.4. Validation in High-Performance Scientific Systems and Complex Industrial Applications
6. Conclusions and Future Directions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| DEVS | Discrete-Event System Specification |
| CPS | Cyber-Physical System |
| IoT | Internet of Things |
| IoCT | Internet of Cyber-Things |
| SES | System Entity Structure |
| M&S | Modeling and Simulation |
| DSL | Domain-Specific Languages |
| FSM | Finite-State Machine |
| DS-DEVS | Dynamic Structure DEVS |
| MBSE | Model-Based Systems Engineering |
| ACM | Actuation Conflict Management |
| CAIDE | Cloud-Based Analysis and Integration for Data Efficiency |
| RT-DEVS | Real-Time DEVS |
| USS | Unmanned Swarm System |
| UAV | Unmanned Autonomous Vehicle |
| PES | Pruned Entity Structure |
| P-DEVS | Parallel Discrete-Event System Specification |
| GUI | Graphical User Interface |
| API | Application Programming Interface |
| NN | Neural Network |
| RTSync | Real-Time Synchronization Corporation |
Appendix A. DEVS and SES Foundations

- From the IoCTDecomp perspective, IoCTSmartApp is made of Sensors and Actuators!
- From the SensorMult perspective, Sensors is made of more than one Sensor!
- From the ActuatorMult perspective, Actuators is made of more than one Actuator!
- Sensor can be SmokeDetector, WaterleakageDetection, or ThermalSensor in SensorType!
- Actuator can be Smartphone, WindowController, or AirConditioner in ActuatorType!
Appendix B. Comparing Modeling Formalisms and DEVS
Appendix B.1. Class Diagrams (UML)
Appendix B.2. State Machines
Appendix B.3. Petri Nets
Appendix B.4. Systems Modeling Language
References
- Fortino, G.; Savaglio, C.; Spezzano, G.; Zhou, M. Internet of Things as System of Systems: A Review of Methodologies, Frameworks, Platforms, and Tools. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 223–236. [Google Scholar] [CrossRef]
- Javed, A.; Malhi, A.; Kinnunen, T.; Främling, K. Scalable IoT Platform for Heterogeneous Devices in Smart Environments. IEEE Access 2020, 8, 211973–211985. [Google Scholar] [CrossRef]
- Zeigler, B.P.; Muzy, A.; Kofman, E. Theory of Modeling and Simulation: Discrete Event & Iterative System Computational Foundations; Academic Press: San Diego, CA, USA, 2018. [Google Scholar]
- Zeigler, B.P.; Mittal, S.T.M. MBSE with/out Simulation: State of the Art and Way Forward. Systems 2018, 6, 40. [Google Scholar] [CrossRef]
- Zeigler, B.; Mittal, S.; Traoré, M. Fundamental Requirements and DEVS Approach for Modeling and Simulation of Complex Adaptive System of Systems: Healthcare Reform. In Proceedings of the Symposium on Modeling and Simulation of Complexity in Intelligent, Adaptive and Autonomous Systems, Baltimore, MD, USA, 15–18 April 2021. [Google Scholar]
- Booker, L.; Forrest, S.; Mitchell, M.; Riolo, R. Perspectives on Adaptation in Natural and Artificial Systems; Oxford University Press: Oxford, UK, 2005. [Google Scholar] [CrossRef]
- Fattahi, A. IoT System Design Process and Main Components. In IoT Product Design and Development: Best Practices for Industrial, Consumer, and Business Applications; Wiley Science Publishers: New York, USA, 2023; pp. 95–161. [Google Scholar] [CrossRef]
- Alavi Fazel, I.; Wainer, G. Discrete Event System Specification for IoT Applications. Sensors 2024, 24, 7784. [Google Scholar] [CrossRef]
- Hu, X.; Zeigler, B.; Couretas, J. DEVS-on-a-chip: Implementing DEVS in real-time Java on a tiny Internet interface for scalable factory automation. In Proceedings of the 2001 IEEE International Conference on Systems, Man and Cybernetics, e-Systems and e-Man for Cybernetics in Cyberspace (Cat.No.01CH37236), Tucson, AZ, USA, 7–10 October 2001; Volume 5, pp. 3051–3056. [Google Scholar] [CrossRef]
- Zeigler, B.P.; Sarjoughian, H. Guide to Modeling and Simulation of System of Systems; Springer: New York, NY, USA, 2017. [Google Scholar]
- Anik, S.M.H.; Gao, X.; Zhong, H.; Wang, X.; Meng, N. Programming of Automation Configuration in Smart Home Systems: Challenges and Opportunities. ACM Trans. Softw. Eng. Methodol. 2025. [Google Scholar] [CrossRef]
- Sehili, S.; Capocchi, L.; Santucci, J.F.; Lavirotte, S.; Tigli, J.Y. Discrete Event Modeling and Simulation for IoT Efficient Design Combining WComp and DEVSimPy Framework. In Proceedings of the 5th International Conference on Simulation and Modeling Methodologies, Technologies and Applications, Colmar, France, 21–23 July 2015; SIMULTECH 2015. pp. 26–34. [Google Scholar] [CrossRef]
- Risco-Martín, J.L.; Prado-Rujas, I.I.; Campoy, J.; Pérez, M.S.; Olcoz, K. Advanced simulation-based predictive modelling for solar irradiance sensor farms. J. Simul. 2024, 19, 265–282. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, C. Modeling and Simulation Based Systems Engineering; World Scientific: Singapore, 2023; Available online: https://www.worldscientific.com/doi/pdf/10.1142/12960 (accessed on 11 June 2025). [CrossRef]
- Sarada, W.; Prashanth, K.; Mary, A.; Premkumar, K.; Vijayan, V.P.; Radha, G. IoT in Smart Homes: Enhancing Lifestyle Through Intelligent Automation and Control. In Proceedings of the 2025 International Conference on Automation and Computation (AUTOCOM), Dehradun, India, 4–6 March 2025; pp. 336–341. [Google Scholar] [CrossRef]
- Ansari, A.M.; Nazir, M.; Mustafa, K. Ontology-Based Classification and Detection of the Smart Home Automation Rules Conflicts. IEEE Access 2024, 12, 85072–85088. [Google Scholar] [CrossRef]
- Liu, R.; Wang, Z.; Garcia, L.; Srivastava, M. RemedioT: Remedial Actions for Internet-of-Things Conflicts. In Proceedings of the 6th ACM International Conference on Systems for Energy-Efficient Buildings, Cities, and Transportation (BuildSys ’19), New York, NY, USA, 13–14 November 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 101–110. [Google Scholar] [CrossRef]
- Capocchi, L.; Santucci, J.F.; Tigli, J.Y.; Gomnin, T.; Lavirotte, S.; Rocher, G. Actuation Conflict Management in Internet of Things Systems DevOps: A Discrete Event Modeling and Simulation Approach. In Proceedings of the Internet of Things; Rey, G., Tigli, J.Y., Franquet, E., Eds.; Springer: Cham, Switzerland, 2025; pp. 189–206. [Google Scholar]
- Capocchi, L. DEVSimPy. Software Available on GitHub. 2024. Available online: https://github.com/capocchi/DEVSimPy (accessed on 11 June 2025).
- Capocchi, L.; Santucci, J.; Poggi, B.; Nicolai, C. DEVSimPy: A Collaborative Python Software for Modeling and Simulation of DEVS Systems. In Proceedings of the 2011 IEEE 20th International Workshops on Enabling Technologies: Infrastructure for Collaborative Enterprises, Paris, France, 27–29 June 2011; pp. 170–175. [Google Scholar] [CrossRef]
- Yentl Van Tendeloo and Hans Vangheluwe. An evaluation of DEVS simulation tools. Simulation 2017, 93, 103–121. [Google Scholar] [CrossRef]
- M, C.J.E.; Orna, G.; Daniel, K.; Doron, P.; Helmut, V. Model Checking; MIT Press: Cambridge, MA, USA, 2018. [Google Scholar]
- Fang, Z.; Fu, H.; Gu, T.; Qian, Z.; Jaeger, T.; Hu, P.; Mohapatra, P. A model checking-based security analysis framework for IoT systems. High-Confid. Comput. 2021, 1, 100004. [Google Scholar] [CrossRef]
- Widyawati, D.K.; Ambarwari, A.; Wahyudi, A. Design and Prototype Development of Internet of Things for Greenhouse Monitoring System. In Proceedings of the 2020 3rd International Seminar on Research of Information Technology and Intelligent Systems (ISRITI), Yogyakarta, Indonesia, 10–11 December 2020; pp. 389–393. [Google Scholar] [CrossRef]
- Harrand, N.; Fleurey, F.; Morin, B.; Husa, K.E. ThingML: A Language and Code Generation Framework for Heterogeneous Targets. In Proceedings of the ACM/IEEE 19th International Conference on Model Driven Engineering Languages and Systems, New York, NY, USA, 2–7 October 2016; MODELS ’16; pp. 125–135. [Google Scholar] [CrossRef]
- Dominici, A.; Capocchi, L.; De Gentili, E.; Santucci, J.F. Discrete Event Modeling and Simulation of Smart Parking Conflict Management. In Proceedings of the 24th International Congress on Modelling and Simulation, Sydney, Australia, 5–10 December 2021; Modsim’21. pp. 246–252. [Google Scholar] [CrossRef]
- Zhang, W.; Li, Q.; Xu, X.; Li, W. Modeling and Simulation of Unmanned Swarm System Based on Dynamic Structure DEVS. J. Phys. Conf. Ser. 2024, 2755, 1–18. [Google Scholar] [CrossRef]
- Banerjee, A.; Choppella, V. Control Software Engineering Approaches for Cyber-Physical Systems: A Systematic Mapping Study. ACM Trans. Cyber-Phys. Syst. 2025, 9, 1–33. [Google Scholar] [CrossRef]
- Kate, C. Internet of Things and Beyond: Cyber-Physical Systems. 2016. Available online: https://katecarruthers.com/2016/04/07/internet-of-things-and-beyond-cyber-physical-systems/ (accessed on 1 June 2025).
- Zeigler, B. DEVS-based building blocks and architectural patterns for intelligent hybrid cyberphysical system design. Information 2021, 12, 531. [Google Scholar] [CrossRef]
- Castro, R.; Marcosig, E.P.; Giribet, J.I. Simulation model continuity for efficient development of embedded controllers in cyber-physical systems. In Complexity Challenges in Cyber Physical Systems: Using Modeling and Simulation (M&S) to Support Intelligence, Adaptation and Autonomy; Springer: Cham, Switzerland, 2019; pp. 81–93. [Google Scholar]
- Fazel, I.A.; Wainer, G. A DEVS-Based Methodology for Simulation and Model-Driven Development of IoT. In Proceedings of the Simulation Tools and Techniques; Guisado-Lizar, J.L., Riscos-Núñez, A., Morón-Fernández, M.J., Wainer, G., Eds.; Springer: Cham, Switzerland, 2024; pp. 3–17. [Google Scholar]
- Rainey, L.; Holland, O. (Eds.) Emergent Behavior in System of Systems Engineering: Real-World Applications, 1st ed.; CRC Press: Boca Raton, FL, USA, 2022. [Google Scholar] [CrossRef]
- Risco-Martín, J.L.; Mittal, S.; Henares, K.; Cardenas, R.; Arroba, P. xDEVS: A toolkit for interoperable modeling and simulation of formal discrete event systems. Softw. Pract. Exp. 2023, 53, 748–789. [Google Scholar] [CrossRef]
- Capocchi, L.; Santucci, J.F.; Fericean, J.; Zeigler, B.P. DEVS Model Design for Simulation Web App Deployment. In Proceedings of the 2022 Winter Simulation Conference (WSC), Singapore, 11–14 December 2022; pp. 2154–2165. [Google Scholar] [CrossRef]
- Trabes, G.G. Efficient DEVS Simulations Design on Heterogeneous Platforms. Doctoral Dissertation, Universidad Nacional de San Luis, San Luis, Argentina, 2023. [Google Scholar] [CrossRef]
- Lee, E.; Seo, Y.D.; Kim, Y.G. Self-Adaptive Framework with Master–Slave Architecture for Internet of Things. IEEE Internet Things J. 2022, 9, 16472–16493. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, L.; He, J.; Cui, Z. Adaptive IoT Decision Making in Uncertain Environments. In Proceedings of the 2023 IEEE International Conference on Smart Internet of Things (SmartIoT), Los Alamitos, CA, USA, 25–27 August 2023; pp. 265–269. [Google Scholar] [CrossRef]
- An, H.; Park, W.; Park, S.; Lee, E. Logical Space Composition of IoT for a Scalable and Adaptable Smart Environment. In Proceedings of the 2024 International Conference on Information Networking (ICOIN), Ho Chi Minh City, Vietnam, 17–19 January 2024; pp. 614–618. [Google Scholar] [CrossRef]
- Earle, B.; Bjornson, K.; Ruiz-Martin, C.; Wainer, G. Development of A Real-Time Devs Kernel: RT-Cadmium. In Proceedings of the 2020 Spring Simulation Conference (SpringSim), Virtual Event, 18–21 May 2020; pp. 1–12. [Google Scholar] [CrossRef]
- Risco-Martín, J.L.; Mittal, S.; Fabero, J.C.; Malagón, P.; Ayala, J.L. Real-time hardware/software co-design using devs-based transparent M&S framework. In Proceedings of the Summer Computer Simulation Conference, San Diego, CA, USA, 24–27 July 2016. SCSC ’16. [Google Scholar]
- Hwang, K.; Lee, M.; Han, S.; Yoon, J.; You, Y.; Kim, S.; Nah, Y. The devs integrated development environment for simulation-based battle experimentation. J. Korea Soc. Simul. 2013, 22, 39–47. [Google Scholar] [CrossRef]
- Matusek, D. Towards Resilient Execution of Adaptation in Decentralized Self-Adaptive Software Systems. In Proceedings of the 2022 IEEE International Conference on Autonomic Computing and Self-Organizing Systems Companion (ACSOS-C), Virtual, 19–23 September 2022; pp. 74–75. [Google Scholar] [CrossRef]
- Alhirabi, N.; Rana, O.; Perera, C. Security and Privacy Requirements for the Internet of Things: A Survey. ACM Trans. Internet Things 2021, 2, 1–37. [Google Scholar] [CrossRef]
- Yuan, H.; Yao, Y.; Tang, W.; Zhu, F. A High Extensible Modeling Method Using Three-Layer Component-Based Architecture. In Proceedings of the 2024 Winter Simulation Conference (WSC), Orlando, FL, USA, 15–18 December 2024; pp. 1–12. [Google Scholar] [CrossRef]
- Xie, K.; Zhang, L.; Chen, Z.; Gu, P. Semi-physical Modeling and Simulation for Industrial Product Design Based on X Language. In Proceedings of the Asia Simulation Conference, Kobe, Japan, 17–20 September 2024; pp. 30–41. [Google Scholar]
- Bonaventura, M.; Foguelman, D.; Castro, R. Discrete Event Modeling and Simulation-Driven Engineering for the ATLAS Data Acquisition Network. Comput. Sci. Eng. 2016, 18, 70–83. [Google Scholar] [CrossRef]
- Boi-Ukeme, J.; Ruiz-Martin, C.; Wainer, G. Real-Time Fault Detection and Diagnosis of CPS Faults in DEVS. In Proceedings of the 2020 IEEE 6th International Conference on Dependability in Sensor, Cloud and Big Data Systems and Application (DependSys), Nadi, Fiji, 14–16 December 2020; pp. 57–64. [Google Scholar] [CrossRef]
- Doddapaneni, K.; Ever, E.; Gemikonakli, O.; Malavolta, I.; Mostarda, L.; Muccini, H. A model-driven engineering framework for architecting and analysing wireless sensor networks. In Proceedings of the IEEE 2012 Third International Workshop on Software Engineering for Sensor Network Applications (SESENA), Zurich, Switzerland, 2 June 2012; pp. 1–7. [Google Scholar]
- Junglas, P.; Jammer, D.; Pawletta, T.; Pawletta, S. Using component-based discrete-event modeling with NSA-DEVS—An invitation. In Proceedings of the ASIM 2024 Tagungsband Langbeiträge, 27th Symposium Simulationstechnik, Neubiberg, Germany, 4–6 September 2024; ASIM: Vienna, Austria, 2024. [Google Scholar]
- Wymore, A. A Mathematical Theory of Systems Engineering: The Elements; Krieger: Huntington, NY, USA, 1967. [Google Scholar]
- Bulcão-Neto, R.; Teixeira, P.; Lebtag, B.; Graciano-Neto, V.; Macedo, A.; Zeigler, B. Simulation of iot-oriented fall detection systems architectures for in-home patients. IEEE Lat. Am. Trans. 2023, 21, 16–26. [Google Scholar] [CrossRef]
- Folkerts, H. An Architecture for Model Behavior Generation for Multiple Simulators. Ph.D. Thesis, University of Applied Sciences Wismar, Wismar, Germany, 2024. Available online: https://dokumente.ub.tu-clausthal.de/receive/clausthal_mods_00002606 (accessed on 1 June 2025). [CrossRef]
- Samuel, K.G.; Bouare, N.D.M.; Maïga, O.; Traoré, M.K. A DEVS-based pivotal modeling formalism and its verification and validation framework. Simulation 2020, 96, 969–992. [Google Scholar] [CrossRef]
- Uhrmacher, A.M. Dynamic structures in modeling and simulation: A reflective approach. ACM Trans. Model. Comput. Simul. 2001, 11, 206–232. [Google Scholar] [CrossRef]
- Reggio, G. A UML-based proposal for IoT system requirements specification. In Proceedings of the 10th International Workshop on Modelling in Software Engineering, New York, NY, USA, 27–28 May 2018; MiSE ’18. pp. 9–16. [Google Scholar] [CrossRef]
- Xiao, R.; Wu, Z.; Wang, D. A Finite-State-Machine model driven service composition architecture for internet of things rapid prototyping. Future Gener. Comput. Syst. 2019, 99, 473–488. [Google Scholar] [CrossRef]
- da Silva Fonseca, J.P.; de Sousa, A.R.; de Souza Tavares, J.J.P.Z. Modeling and controlling IoT-based devices’ behavior with high-level Petri nets. Procedia Comput. Sci. 2023, 217, 1462–1469. [Google Scholar] [CrossRef]
- Escamilla-Ambrosio, P.J.; Robles-Ramírez, D.A.; Tryfonas, T.; Rodríguez-Mota, A.; Gallegos-García, G.; Salinas-Rosales, M. IoTsecM: A UML/SysML Extension for Internet of Things Security Modeling. IEEE Access 2021, 9, 154112–154135. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Phase | Accuracy (%) |
|---|---|
| Basic Poisson Simulation | 85.2 |
| Constraint-Based Simulation | 90.4 |
| Daily Behavior Consideration | 93.1 |
| Billing Time Integration | 95.7 |
| Final Accuracy on Real Data | 96.6 |
| DEVS Properties | Expressiveness Features |
|---|---|
| DEVS atomic model functions | capture microscopic behaviors (messages, timing, decisions), express temporal interaction with sensors and actuators |
| DEVS hierarchical modular construction | supports incrementally verifiable functionality, expresses collaborative interaction in centralized and decentralized control, expresses the IoCT architecture, which is layered with sensor, Fog, and cloud layers |
| DEVS modularity | provides flexible support for the variable functionality required for AI/ML model analysis and retraining |
| DEVS temporal properties | express concurrent multiple streams of temporal events enabling simulation-based validation of the coordination and synchronization mechanisms |
| DEVS dynamic structure | enables structural changes needed for adaptive behavior |
| DEVS system-theory basis | supports definition of building blocks and architectural patterns for intelligent hybrid Cyber-Physical System design |
| Inter-Stage Transitions | DEVS Model Continuity Features |
|---|---|
| Migration from design to simulation | The DEVS simulation engine is coded in a variety of programming and higher-level languages for design and simulation. |
| Migration from simulation to execution | DEVS simulation engine can be transformed from its abstract time base to real-time bases, and DEVS models can be converted to hardware or middleware forms for real-time execution. |
| Diversity of implementation media | The DEVS simulation engine can be mapped to middleware implementations enabling straightforward integration with IoCT infrastructures. DEVS supports deployment across diverse hardware platforms with varying timing characteristics, underscoring its adaptability and portability. DEVS Execution engines can be implemented in diverse technologies such as virtualization, hardware, embedded systems, and bioware. |
| Formalism | Strengths | Limitations Compared to DEVS |
|---|---|---|
| Class diagrams | Good for static structure modeling | Lacks temporal dynamics, reactivity, and execution models |
| State machines | Effective for sequential control and finite states | No support for concurrency, hierarchical design, or modularity |
| Petri nets | Excellent for concurrency and synchronization | Limited modularity, no inherent support for dynamic structures or execution strategies |
| SysML | Useful for complex system-of-systems modeling | Lacks native simulation support and real-time execution capabilities |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Capocchi, L.; Zeigler, B.P.; Santucci, J.-F. Simulation-Based Development of Internet of Cyber-Things Using DEVS. Computers 2025, 14, 258. https://doi.org/10.3390/computers14070258
Capocchi L, Zeigler BP, Santucci J-F. Simulation-Based Development of Internet of Cyber-Things Using DEVS. Computers. 2025; 14(7):258. https://doi.org/10.3390/computers14070258
Chicago/Turabian StyleCapocchi, Laurent, Bernard P. Zeigler, and Jean-Francois Santucci. 2025. "Simulation-Based Development of Internet of Cyber-Things Using DEVS" Computers 14, no. 7: 258. https://doi.org/10.3390/computers14070258
APA StyleCapocchi, L., Zeigler, B. P., & Santucci, J.-F. (2025). Simulation-Based Development of Internet of Cyber-Things Using DEVS. Computers, 14(7), 258. https://doi.org/10.3390/computers14070258