Automatic Manipulation of Magnetically Actuated Helical Microswimmers in Static Environments



Abstract
1. Introduction
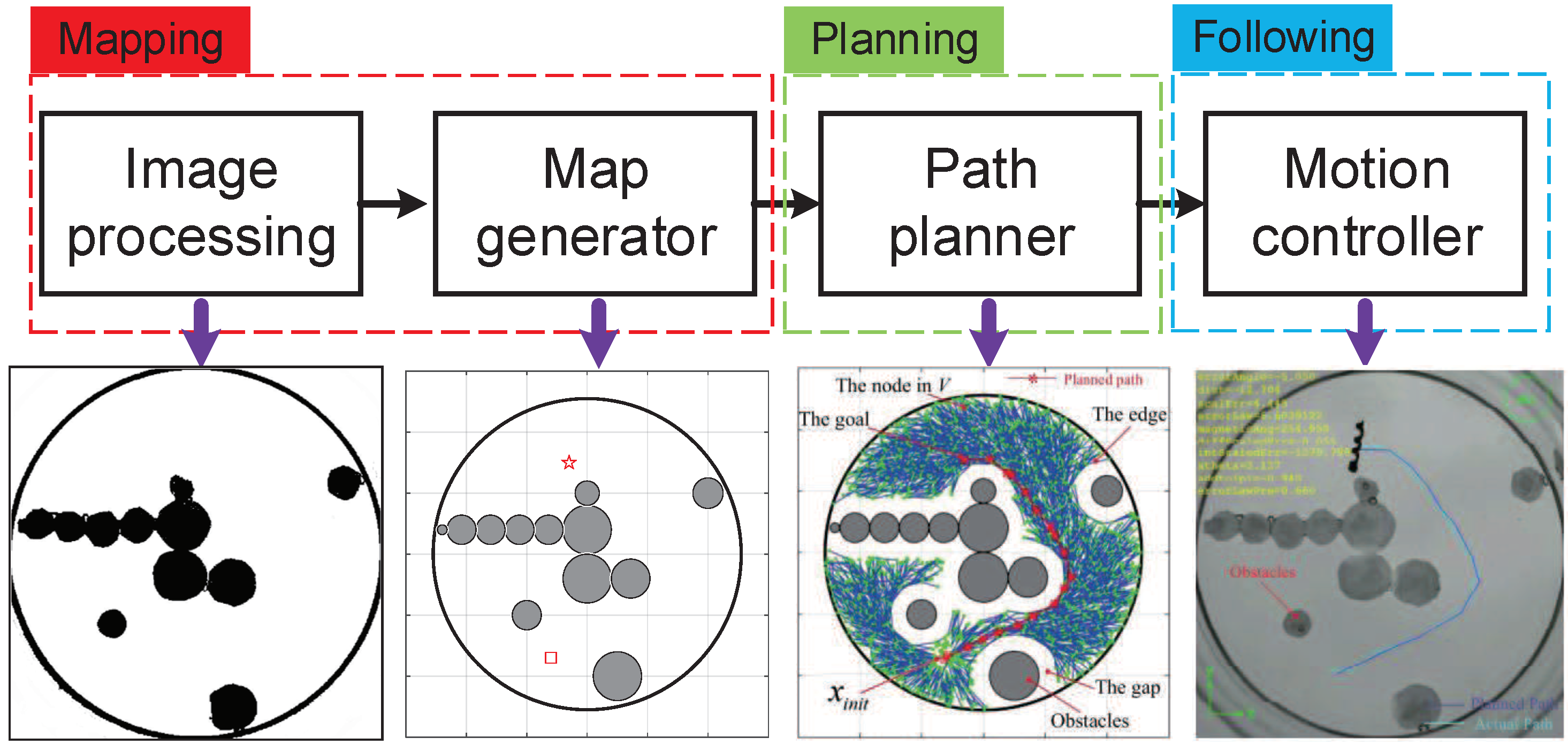
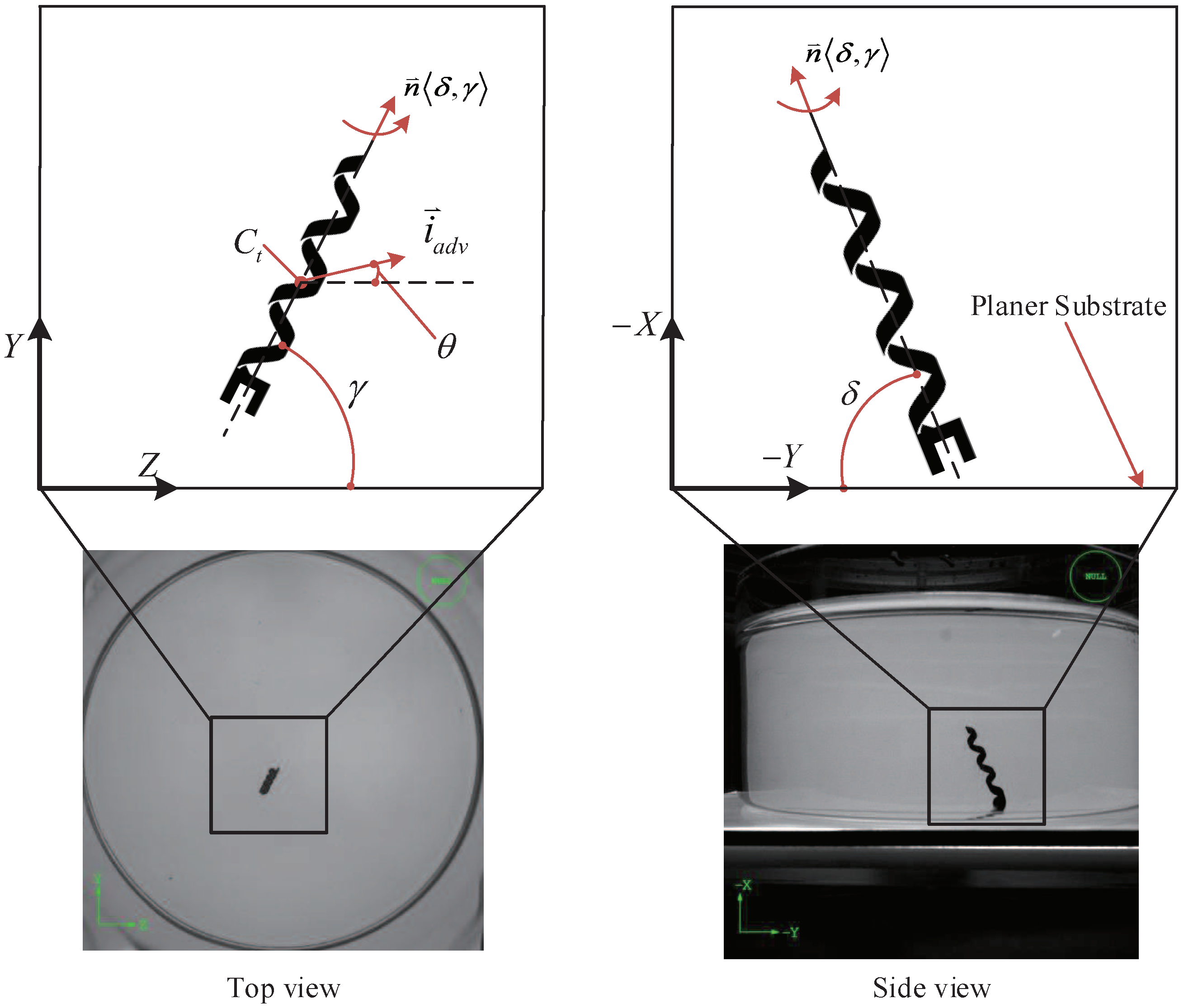
2. Automatic Manipulation System Architecture
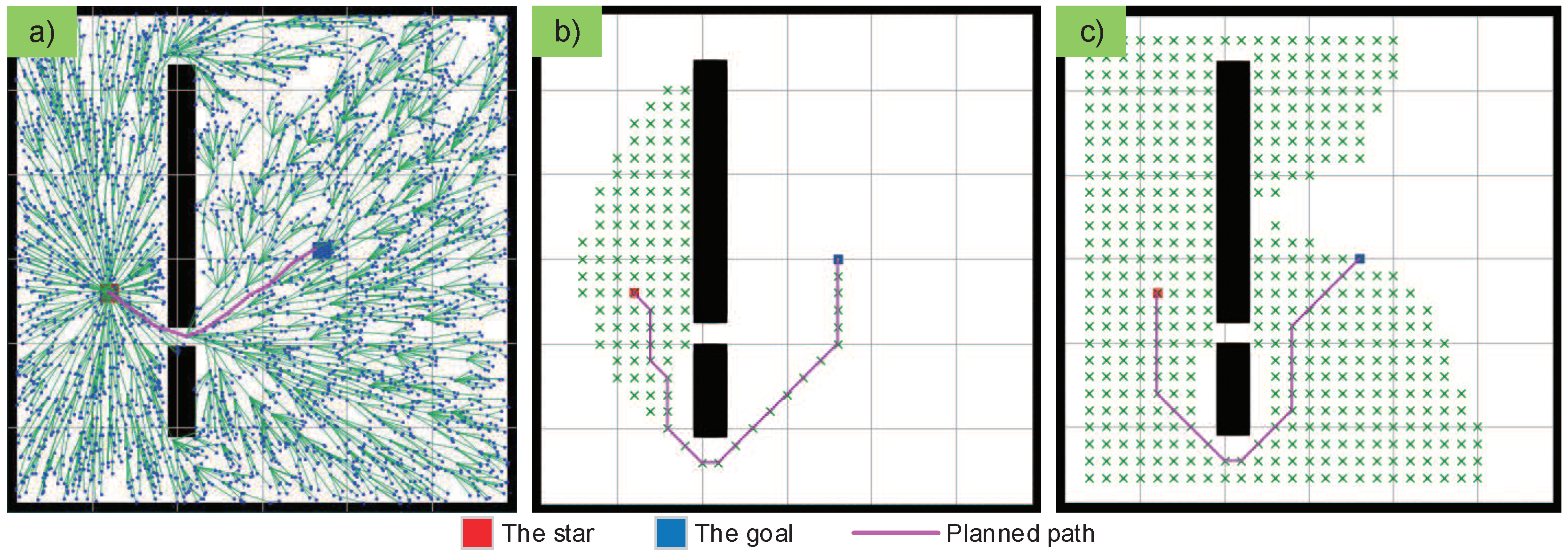
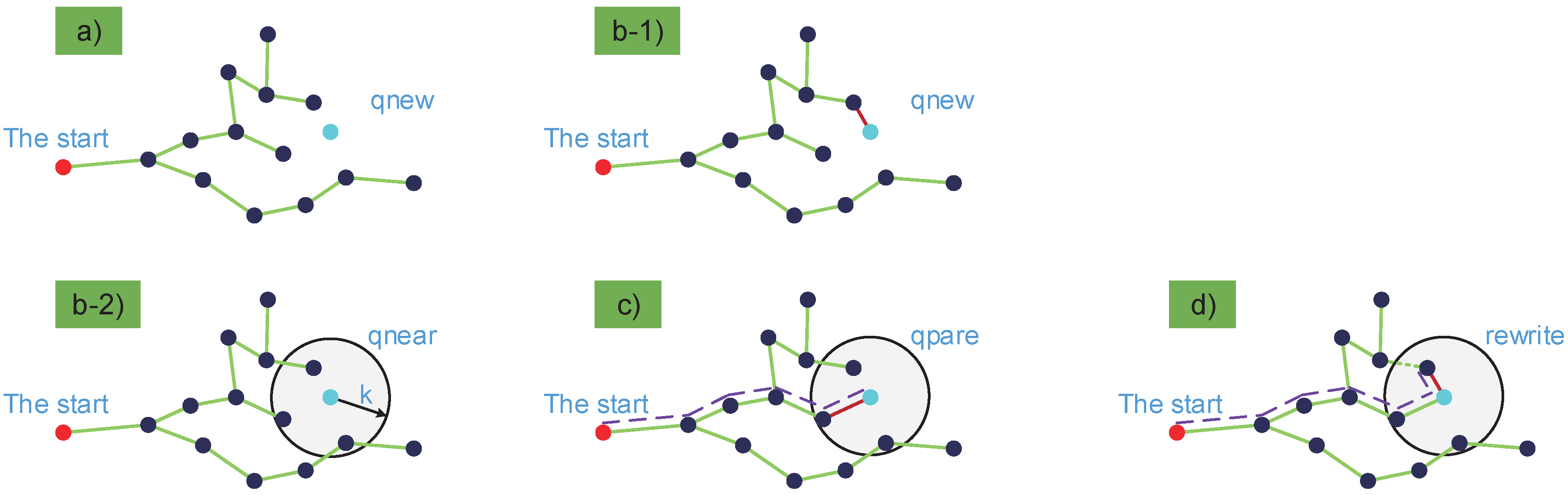
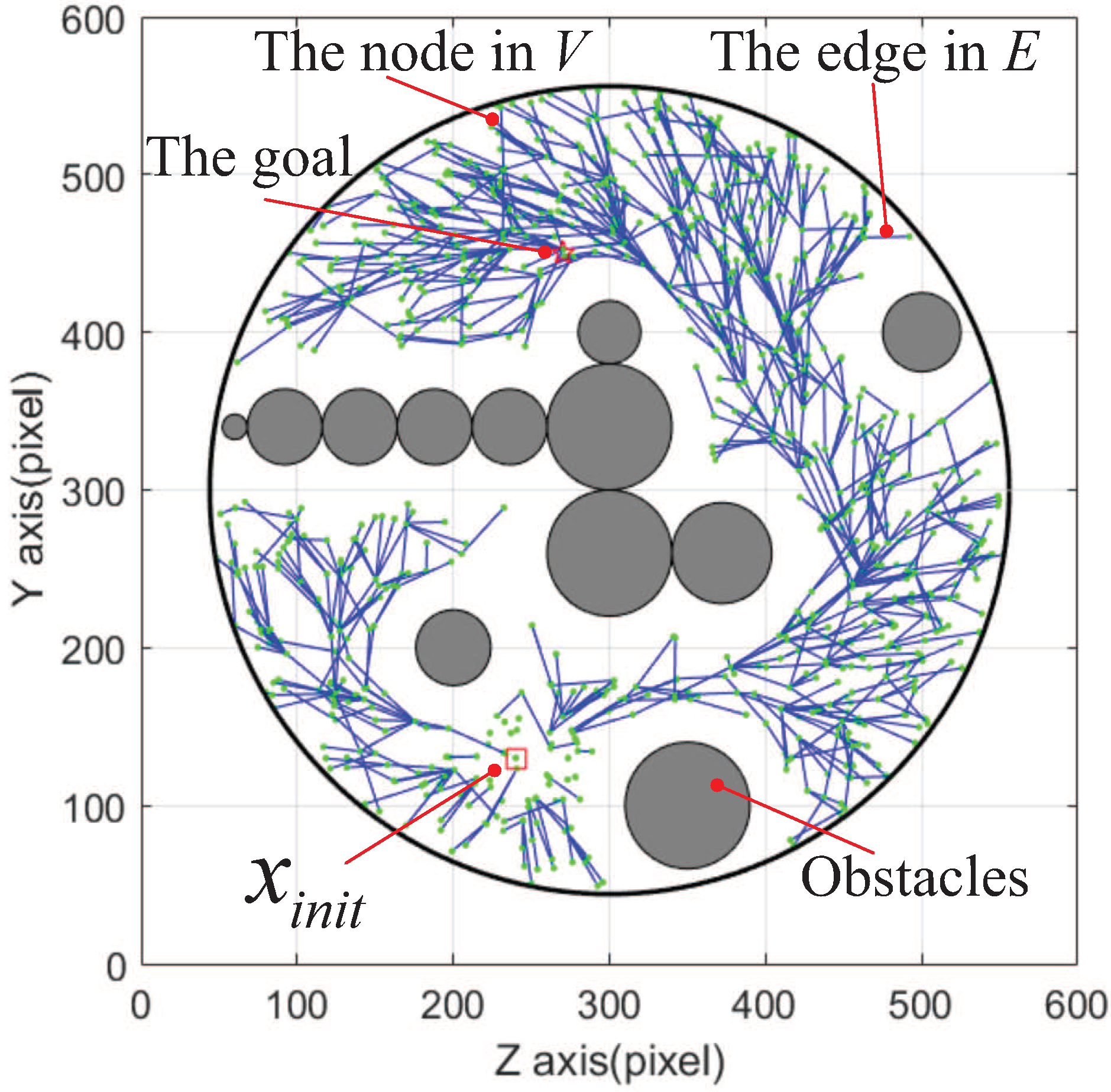
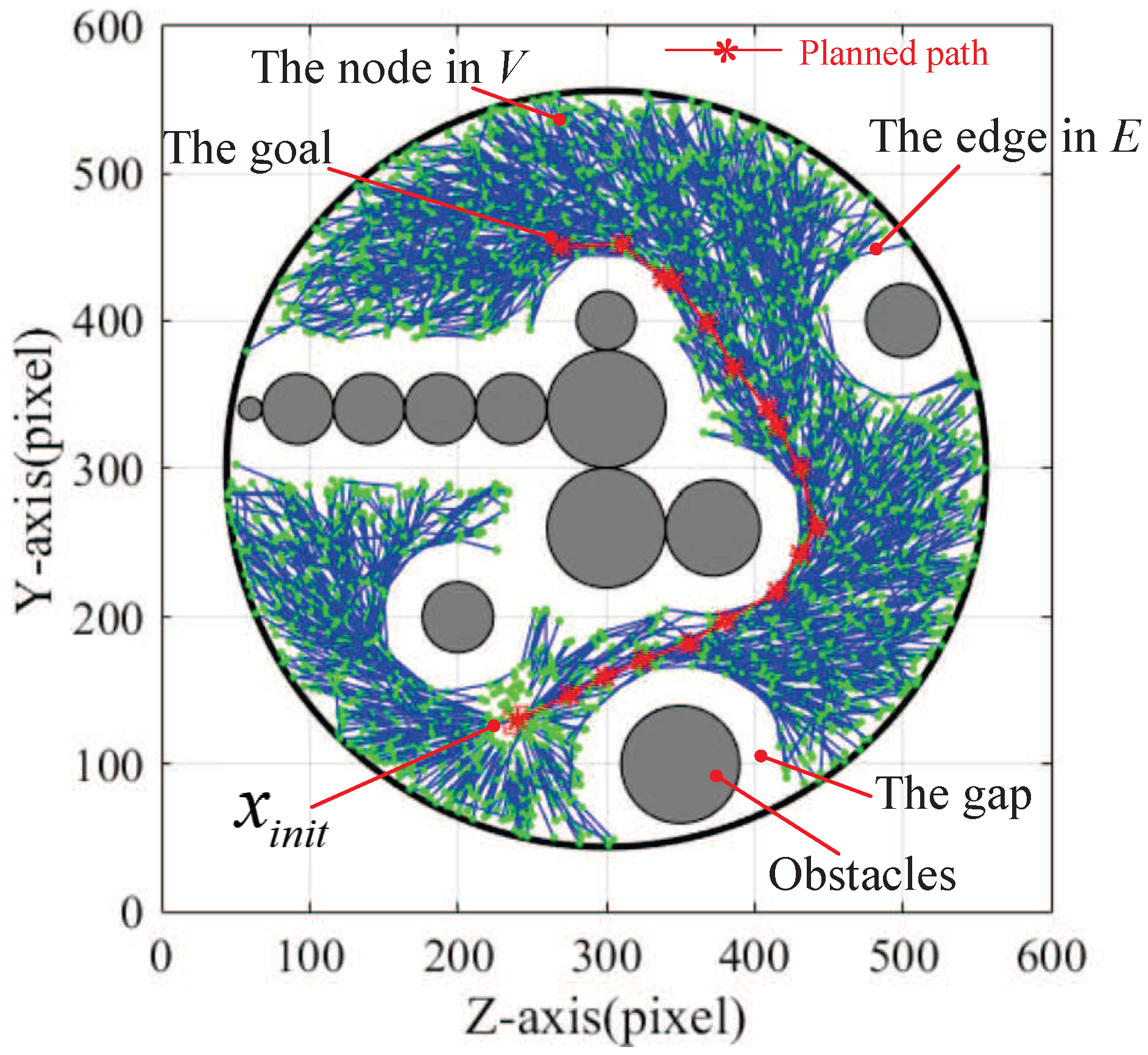
3. Static Path Planning
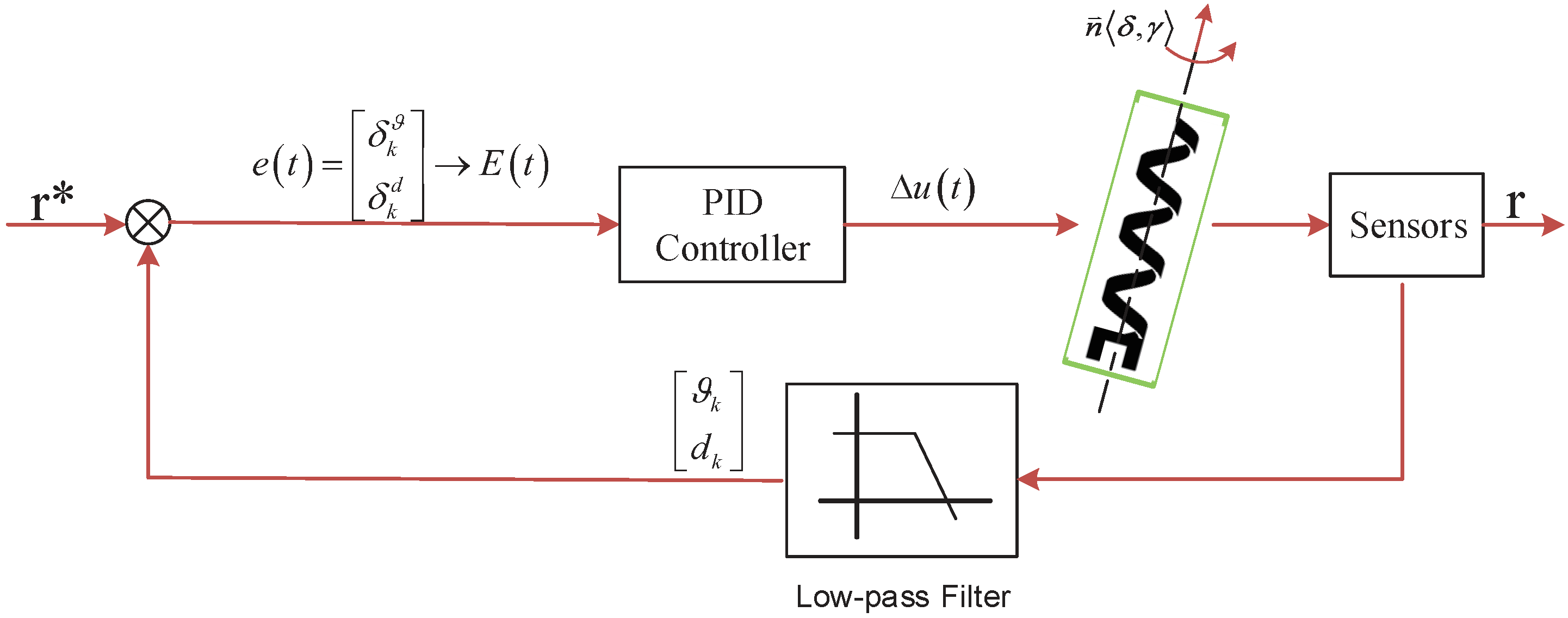
4. Motion Controller Design
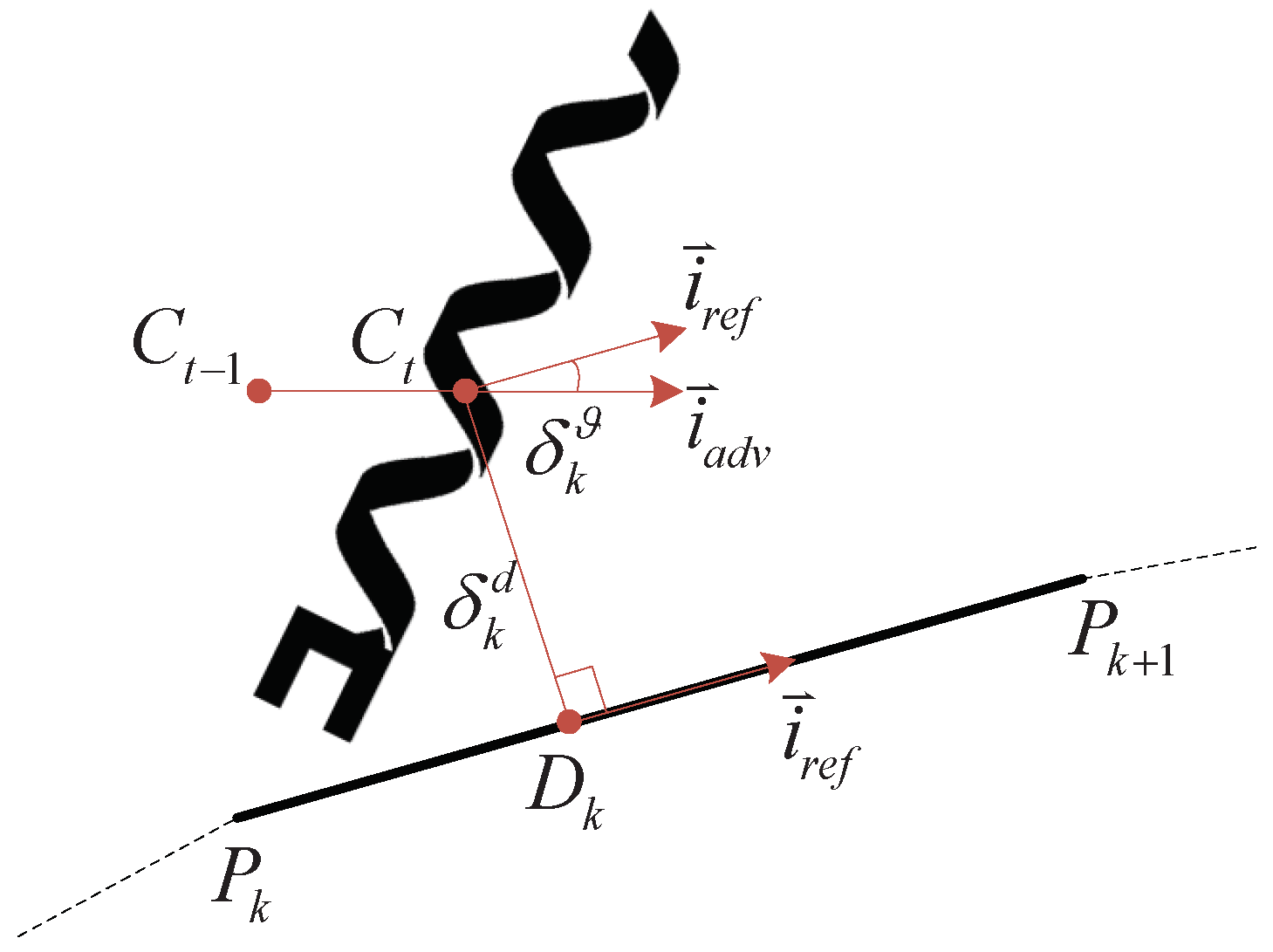
4.1. Path Following Problem
- and are the start and end points on one linear segment.
- and are the previous and current barycenter positions of the helical microswimmer.
- is the projection of onto the linear segment .
- is the distance error between barycenter and projection point on the path.
- is the unit vector along
- is the unit vector along .
- is the angle error between and
4.2. Motion Controller Design
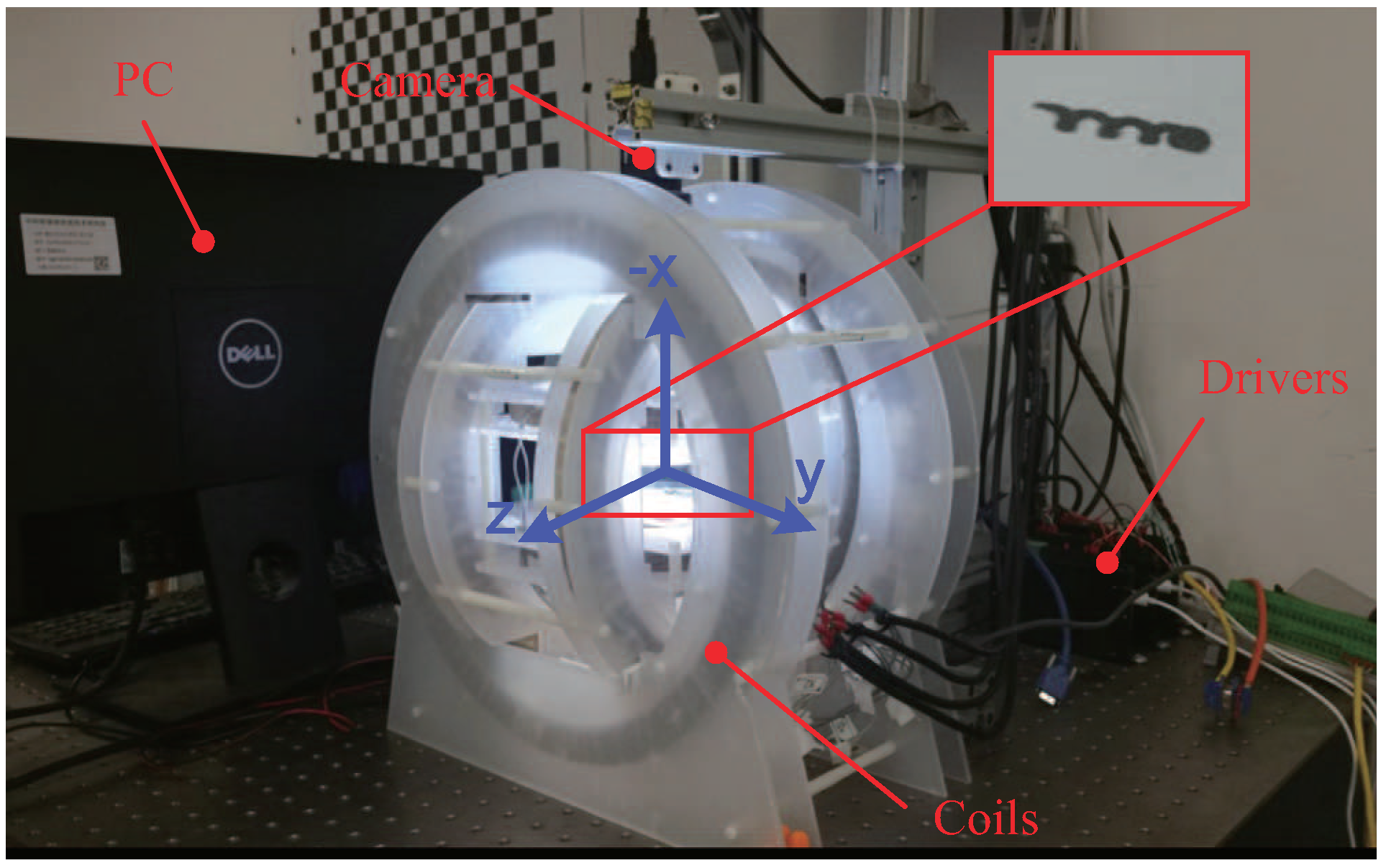
5. Manipulation System
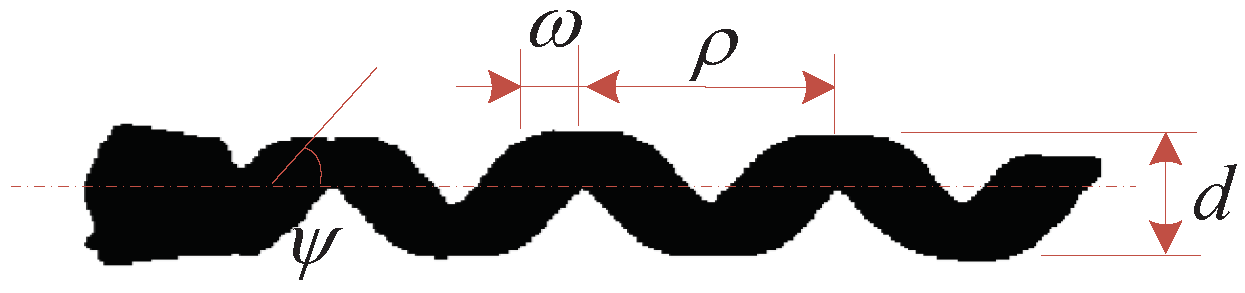
5.1. Helical Microswimmers
5.2. Magnetic Actuated System
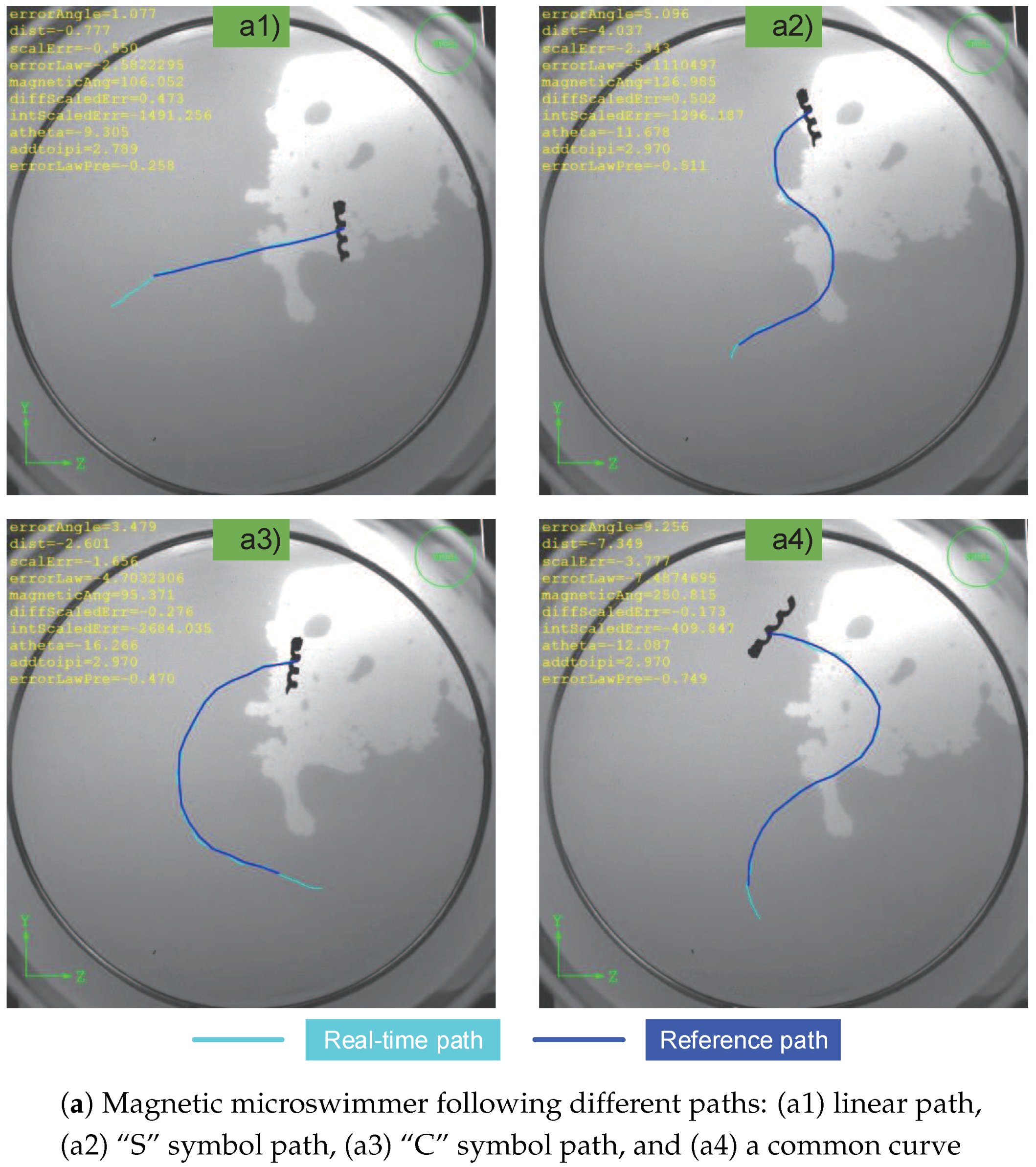
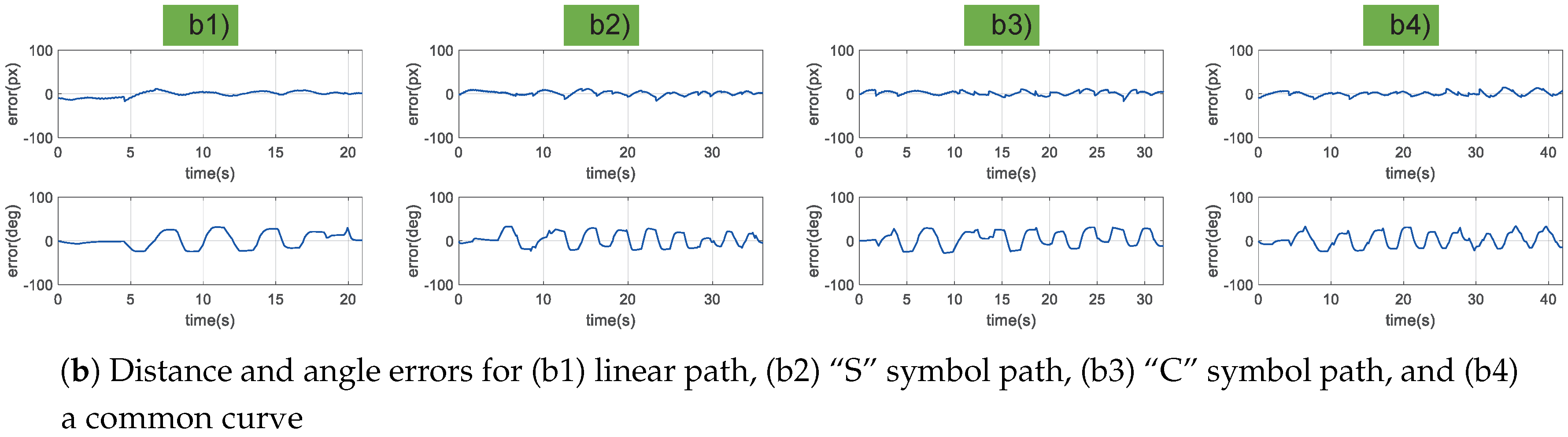
6. Experiments
7. Conclusions
Supplementary Materials
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Nelson, B.J.; Kaliakatsos, I.K.; Abbott, J.J. Microrobots for Minimally Invasive Medicine. Annu. Rev. Biomed. Eng. 2010, 12, 55–85. [Google Scholar] [CrossRef] [PubMed]
- Peyer, K.E.; Zhang, L.; Nelson, B.J. Bio-inspired magnetic swimming microrobots for biomedical applications. Nanoscale 2013, 5, 1259–1272. [Google Scholar] [CrossRef] [PubMed]
- Han, K.; Shields, C.W., IV; Velev, O.D. Engineering of self-propelling microbots and microdevices powered by magnetic and electric fields. Adv. Funct. Mater. 2018, 28, 1705953. [Google Scholar] [CrossRef]
- Chen, H.; Sun, D. Moving Groups of Microparticles Into Array with a Robot–Tweezers Manipulation System. IEEE Trans. Robot. 2012, 28, 1069–1080. [Google Scholar] [CrossRef]
- Ghanbari, A.; Chang, P.H.; Nelson, B.J.; Choi, H. Magnetic actuation of a cylindrical microrobot using time-delay-estimation closed-loop control: Modeling and experiments. Smart Mater. Struct. 2014, 23, 035013. [Google Scholar] [CrossRef]
- Martínez-Pedrero, F.; Tierno, P. Advances in colloidal manipulation and transport via hydrodynamic interactions. J. Colloid Interface Sci. 2018, 519, 296–311. [Google Scholar] [CrossRef] [PubMed]
- Huang, T.Y.; Qiu, F.; Tung, H.W.; Peyer, K.; Shamsudhin, N.; Pokki, J.; Zhang, L.; Chen, X.B.; Nelson, B.; Sakar, M. Cooperative manipulation and transport of microobjects using multiple helical microcarriers. RSC Adv. 2014, 4, 26771–26776. [Google Scholar] [CrossRef]
- Niu, R.; Palberg, T. Seedless assembly of colloidal crystals by inverted micro-fluidic pumping. Soft Matter 2018, 14, 3435–3442. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Jiao, N.; Tung, S.; Liu, L. Magnetic microrobot and its application in a microfluidic system. Robot. Biomim. 2014, 1, 18. [Google Scholar] [CrossRef]
- Katuri, J.; Caballero, D.; Voituriez, R.; Samitier, J.; Sanchez, S. Directed Flow of Micromotors through Alignment Interactions with Micropatterned Ratchets. ACS Nano 2018, 12, 7282–7291. [Google Scholar] [CrossRef] [PubMed]
- Diller, E.; Sitti, M. Three-Dimensional Programmable Assembly by Untethered Magnetic Robotic Micro-Grippers. Adv. Funct. Mater. 2014, 24, 4397–4404. [Google Scholar] [CrossRef]
- Servant, A.; Qiu, F.; Mazza, M.; Kostarelos, K.; Nelson, B.J. Controlled in vivo swimming of a swarm of bacteria-like microrobotic flagella. Adv. Mater. 2015, 27, 2981–2988. [Google Scholar] [CrossRef] [PubMed]
- Park, B.W.; Zhuang, J.; Yasa, O.; Sitti, M. Multifunctional bacteria-driven microswimmers for targeted active drug delivery. ACS Nano 2017, 11, 8910–8923. [Google Scholar] [CrossRef] [PubMed]
- Simmchen, J.; Katuri, J.; Uspal, W.E.; Popescu, M.N.; Tasinkevych, M.; Sánchez, S. Topographical pathways guide chemical microswimmers. Nat. Commun. 2016, 7, 10598. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Yu, J.; Yan, X.; Choi, H.; Zhang, L. Magnetic actuation based motion control for microrobots: An overview. Micromachines 2015, 6, 1346–1364. [Google Scholar] [CrossRef]
- Belharet, K.; Folio, D.; Ferreira, A. Endovascular navigation of a ferromagnetic microrobot using MRI-based predictive control. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan, 18–22 October 2010; pp. 2804–2809. [Google Scholar]
- Charreyron, S.; Pieters, R.S.; Tung, H.W.; Gonzenbach, M.; Nelson, B.J. Navigation of a rolling microrobot in cluttered environments for automated crystal harvesting. In Proceedings of the 2015 IEEE International Conference of Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 177–182. [Google Scholar]
- Jing, W.; Chowdhury, S.; Guix, M.; Wang, J.; An, Z.; Johnson, B.V.; Cappelleri, D.J. A Microforce-Sensing Mobile Microrobot for Automated Micromanipulation Tasks. IEEE Trans. Automat. Sci. Eng. 2018, 1–13. [Google Scholar] [CrossRef]
- Li, T.; Chang, X.; Wu, Z.; Li, J.; Shao, G.; Deng, X.; Qiu, J.; Guo, B.; Zhang, G.; He, Q.; et al. Autonomous collision-free navigation of microvehicles in complex and dynamically changing environments. ACS Nano 2017, 11, 9268–9275. [Google Scholar] [CrossRef] [PubMed]
- Ju, T.; Liu, S.; Yang, J.; Sun, D. Rapidly exploring random tree algorithm-based path planning for robot-aided optical manipulation of biological cells. IEEE Trans. Autom. Sci. Eng. 2014, 11, 649–657. [Google Scholar] [CrossRef]
- Kim, D.H.; Brigandi, S.; Julius, A.A.; Kim, M.J. Real-time feedback control using artificial magnetotaxis with rapidly-exploring random tree (RRT) for Tetrahymena pyriformis as a microbiorobot. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 3183–3188. [Google Scholar]
- Kim, H.; Cheang, U.K.; Rogowski, L.W.; Kim, M.J. Motion planning of particle based microrobots for static obstacle avoidance. J. Micro-Bio Robot. 2018, 14, 41–49. [Google Scholar] [CrossRef]
- Temel, F.Z.; Bezer, A.E.; Yesilyurt, S. Navigation of mini swimmers in channel networks with magnetic fields. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 5335–5340. [Google Scholar]
- Barbot, A.; Decanini, D.; Hwang, G. On-chip microfluidic multimodal swimmer toward 3D navigation. Sci. Rep. 2016, 6, 19041. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Jiao, N.; Tung, S.; Liu, L. Automatic path tracking and target manipulation of a magnetic microrobot. Micromachines 2016, 7, 212. [Google Scholar] [CrossRef]
- Xu, T.; Hwang, G.; Andreff, N.; Regnier, S. Modeling and Swimming Property Characterizations of Scaled-Up Helical Microswimmers. IEEE-ASME Trans. 2014, 19, 1069–1079. [Google Scholar] [CrossRef]
- Mahoney, A.; Sarrazin, J.; Bamberg, E.; Abbott, J. Velocity Control with Gravity Compensation for Magnetic Helical Microswimmers. Adv. Robot. 2011, 25, 1007–1028. [Google Scholar] [CrossRef]
- Fu, H.C.; Jabbarzadeh, M.; Meshkati, F. Magnetization directions and geometries of helical microswimmers for linear velocity-frequency response. Phys. Rev. E 2015, 91, 043011. [Google Scholar] [CrossRef] [PubMed]
- Tottori, S.; Zhang, L.; Qiu, F.; Krawczyk, K.K.; Francoobregón, A.; Nelson, B.J. Magnetic helical micromachines: fabrication, controlled swimming, and cargo transport. Adv. Mater. 2012, 24, 811–816. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Hwang, G.; Andreff, N.; Régnier, S. Planar Path Following of 3-D Steering Scaled-Up Helical Microswimmers. IEEE Trans. Robot. 2015, 31, 117–127. [Google Scholar] [CrossRef]
- Guan, Y.; Xu, T.; Liu, J.; Xinyu, W. Image-based visual servoing of helical microswimmers for arbitrary planar path following at low reynolds numbers. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017. [Google Scholar]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Purcell, E.M. Life at low Reynolds-number. Am. J. Phys. 1977, 45, 3–11. [Google Scholar] [CrossRef]
- Purcell, E.M. The Efficiency of Propulsion by a Rotating Flagellum. Proc. Natl. Acad. Sci. USA 1997, 94, 11307–11311. [Google Scholar] [CrossRef] [PubMed]
- Xu, T.; Hwang, G.; Andreff, N.; Regnier, S. Characterization of three-dimensional steering for helical swimmers. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 4686–4691. [Google Scholar]
- Hunter, E.E.; Brink, E.W.; Steager, E.B.; Kumar, V. Toward Soft Micro Bio Robots for Cellular and Chemical Delivery. IEEE Robot. Automat. Lett. 2018, 3, 1592–1599. [Google Scholar] [CrossRef]
- Liu, J.; Xu, T.; Guan, Y.; Yan, X.; Ye, C.; Wu, X. Swimming Characteristics of Bioinspired Helical Microswimmers Based on Soft Lotus-Root Fibers. Micromachines 2017, 8, 349. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Control Frequency (Hz) | Inclination Angle (°) | Rotation Frequency (Hz) | ||
|---|---|---|---|---|---|
| Values | 16 | 45 | 0.8 | 1.2 | 5 |
| Path | Linear | “S” Symbol | “C” Symbol | Curve | Planned |
|---|---|---|---|---|---|
| RMS/pixel | 9.4 | 8.0 | 8.2 | 8.1 | 7.8 |
| RMS/mm | 0.395 | 0.336 | 0.344 | 0.340 | 0.328 |
| κ | 2.69% | 2.29% | 2.34% | 2.31% | 2.23% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Xu, T.; Huang, C.; Wu, X. Automatic Manipulation of Magnetically Actuated Helical Microswimmers in Static Environments. Micromachines 2018, 9, 524. https://doi.org/10.3390/mi9100524
Liu J, Xu T, Huang C, Wu X. Automatic Manipulation of Magnetically Actuated Helical Microswimmers in Static Environments. Micromachines. 2018; 9(10):524. https://doi.org/10.3390/mi9100524
Chicago/Turabian StyleLiu, Jia, Tiantian Xu, Chenyang Huang, and Xinyu Wu. 2018. "Automatic Manipulation of Magnetically Actuated Helical Microswimmers in Static Environments" Micromachines 9, no. 10: 524. https://doi.org/10.3390/mi9100524
APA StyleLiu, J., Xu, T., Huang, C., & Wu, X. (2018). Automatic Manipulation of Magnetically Actuated Helical Microswimmers in Static Environments. Micromachines, 9(10), 524. https://doi.org/10.3390/mi9100524