Compact Mass Flow Meter Based on a Micro Coriolis Flow Sensor

Abstract
:1. Introduction
1.1. Novelty
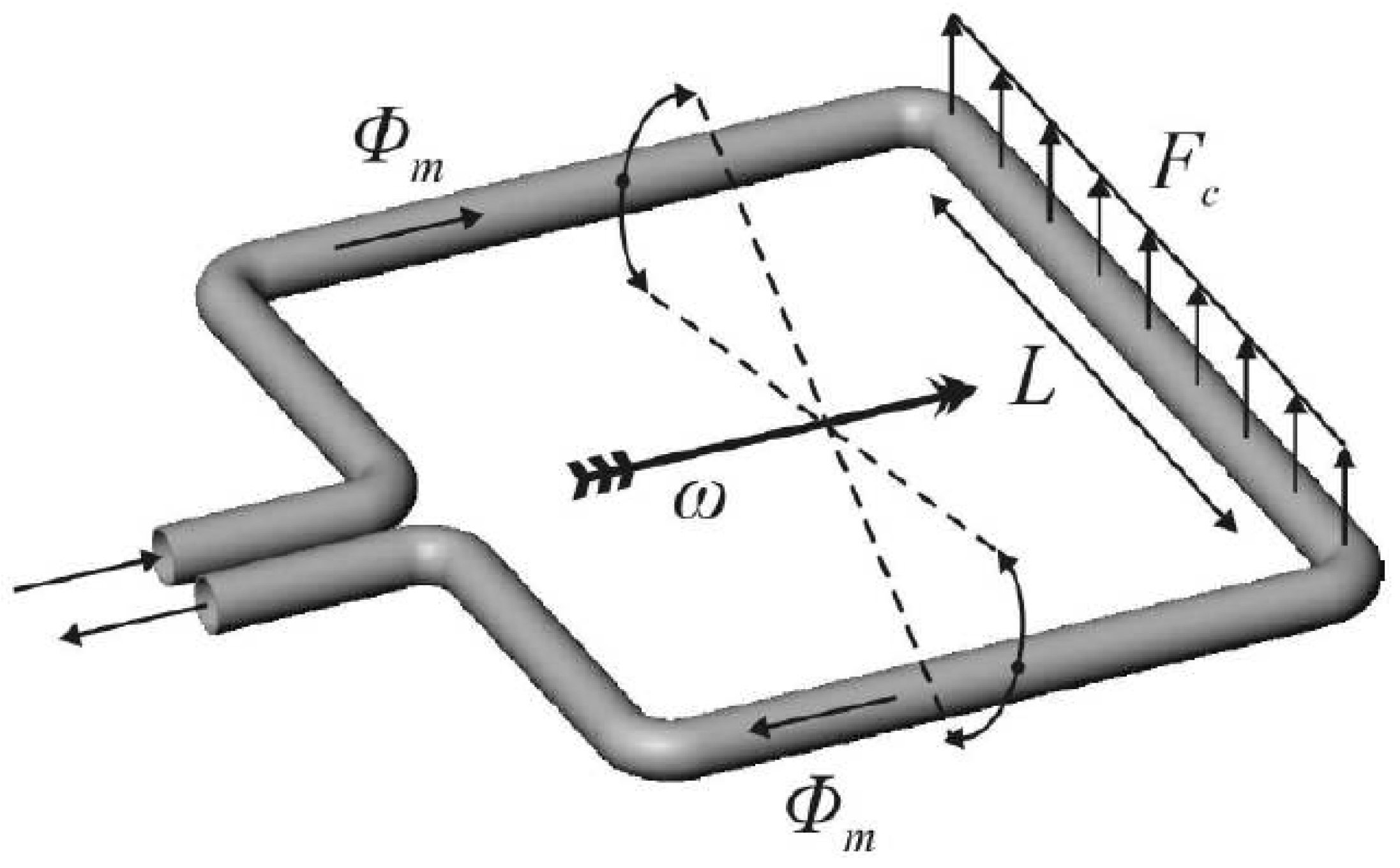
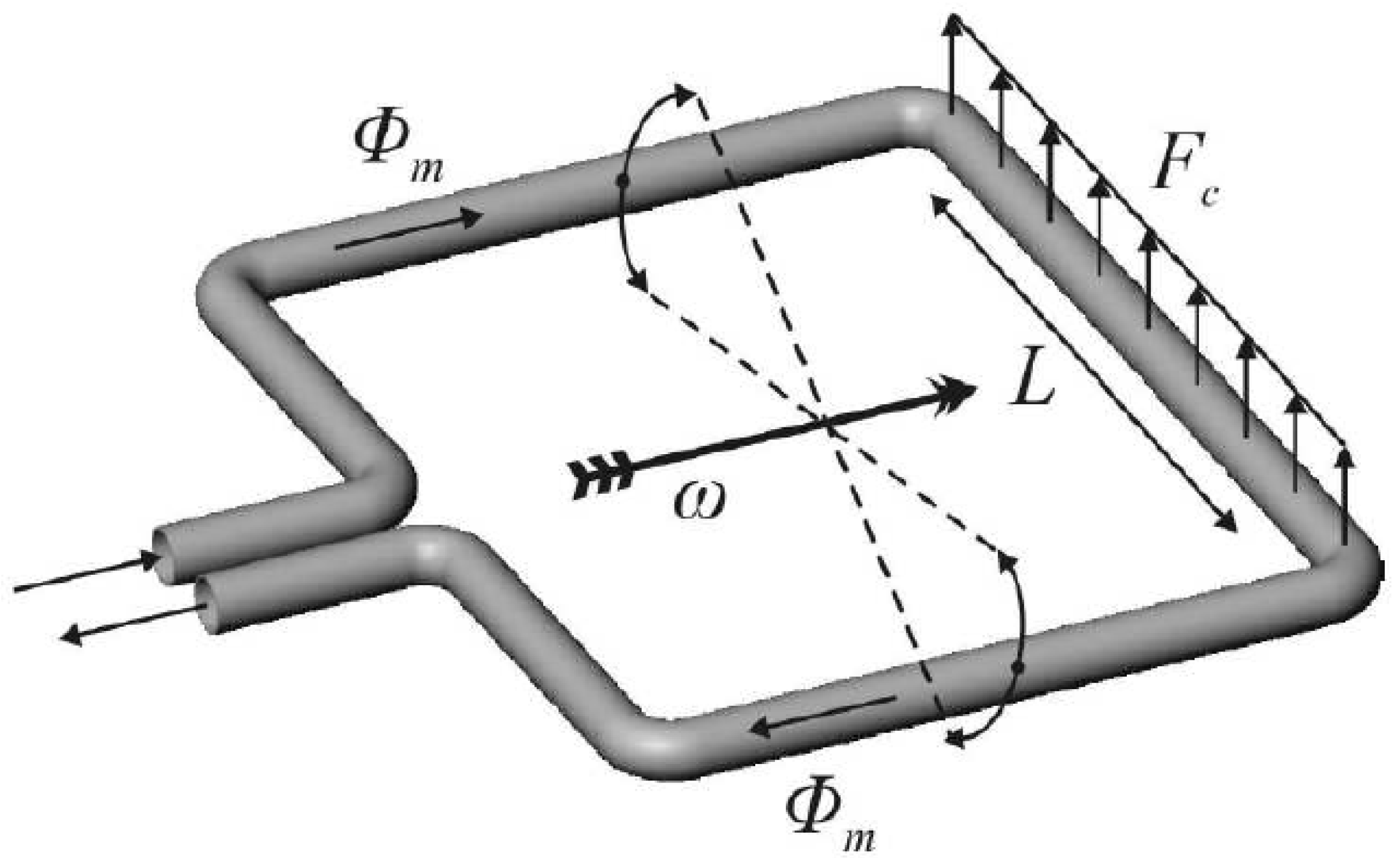
1.2. Sensor Structure and Operating Principle
2. Experimental Section
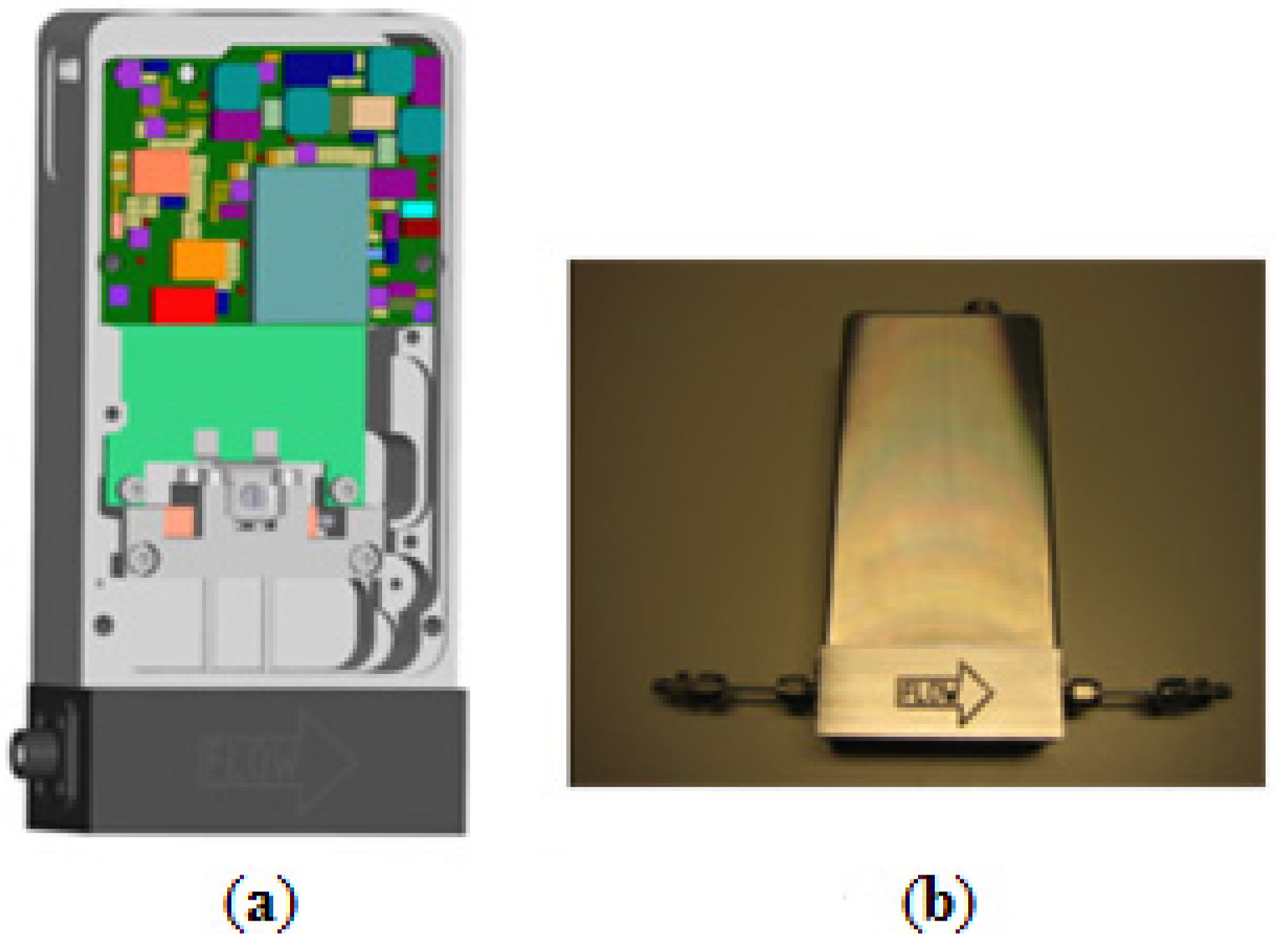
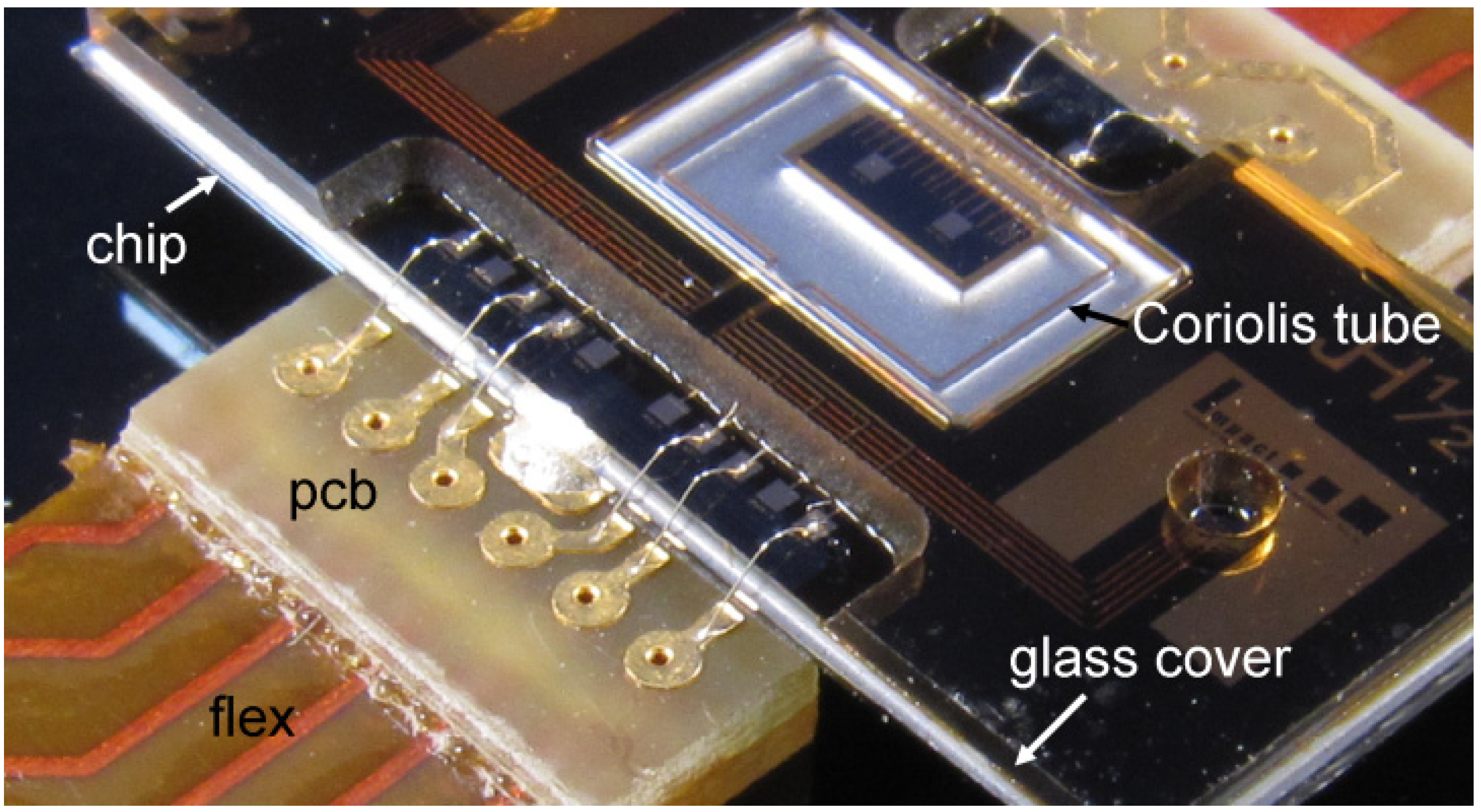
2.1 Microfluidic Chip, Packaging and Interfacing Details
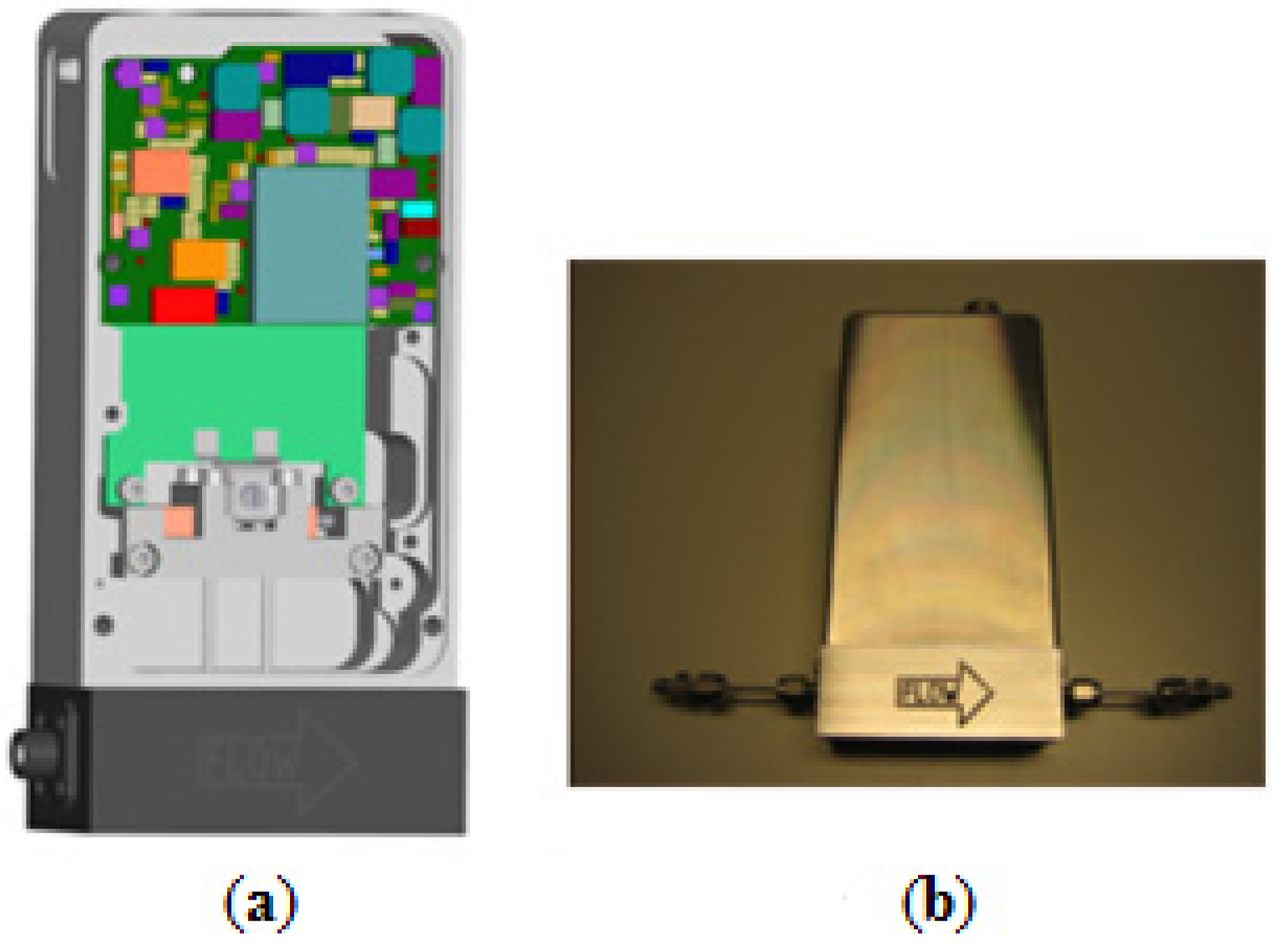
2.1.1. Chip and Packaging
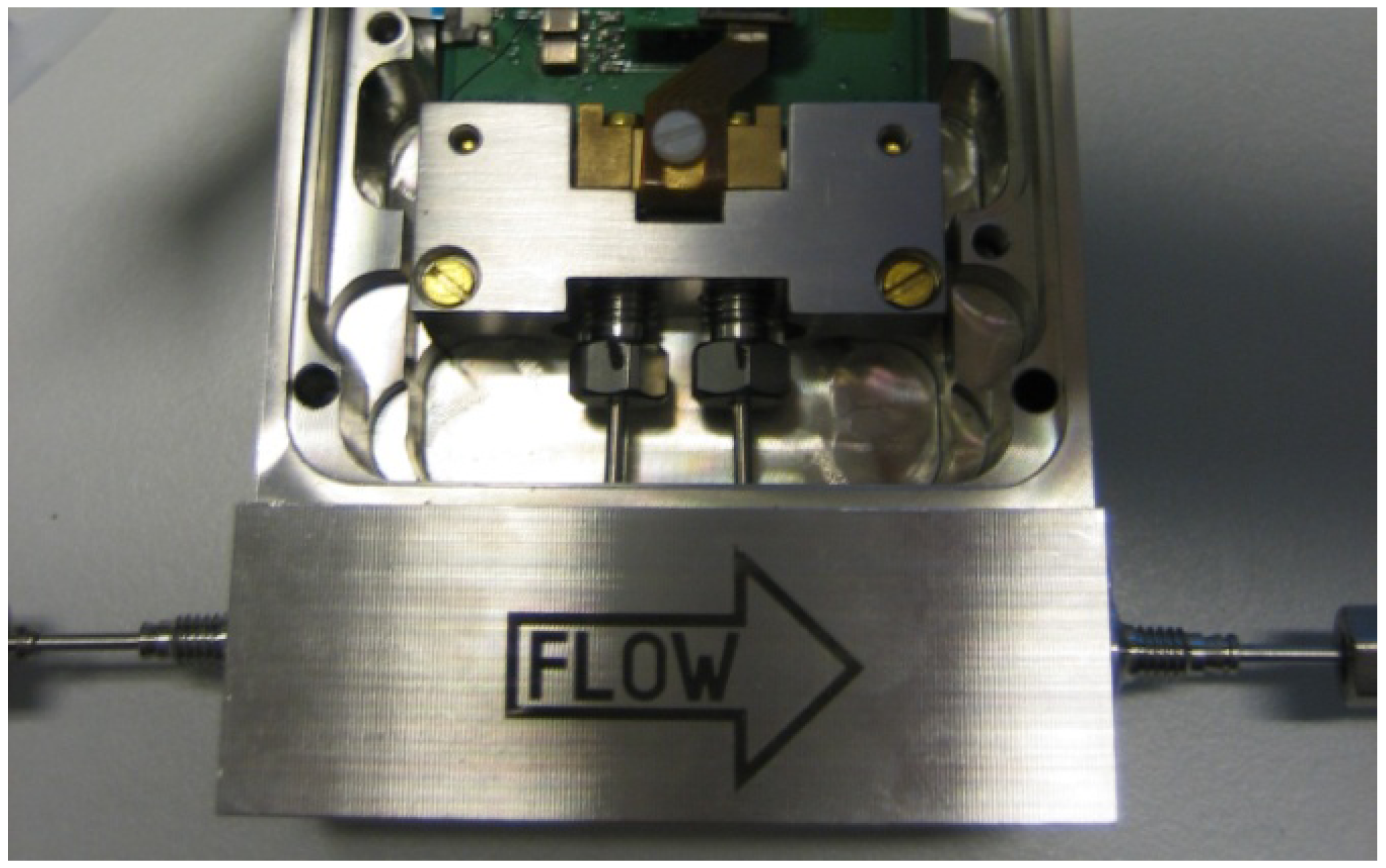
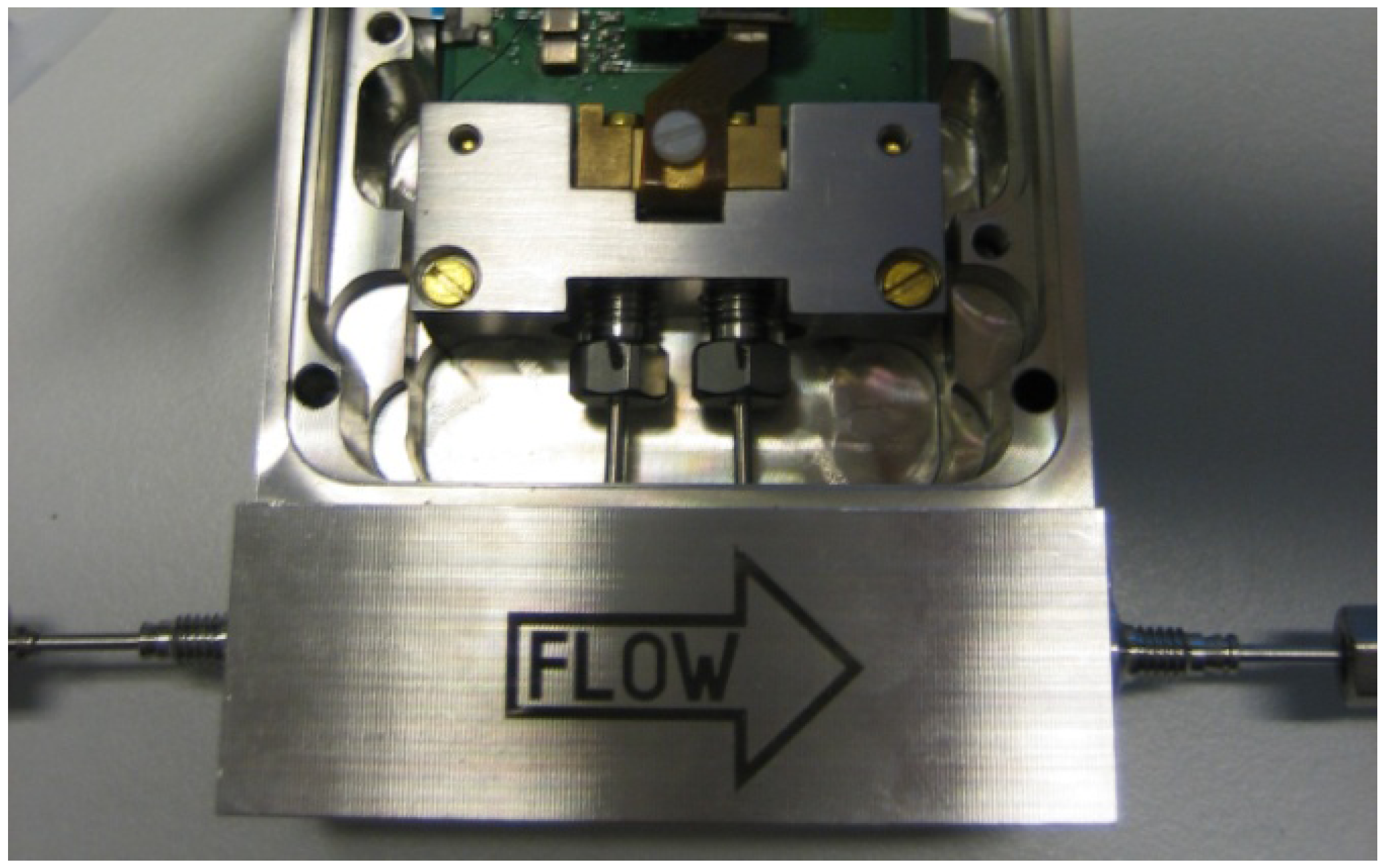
2.1.2. Chip holder and Fluidic Connections
2.1.3. Electronics
2.2. Experimental Setups
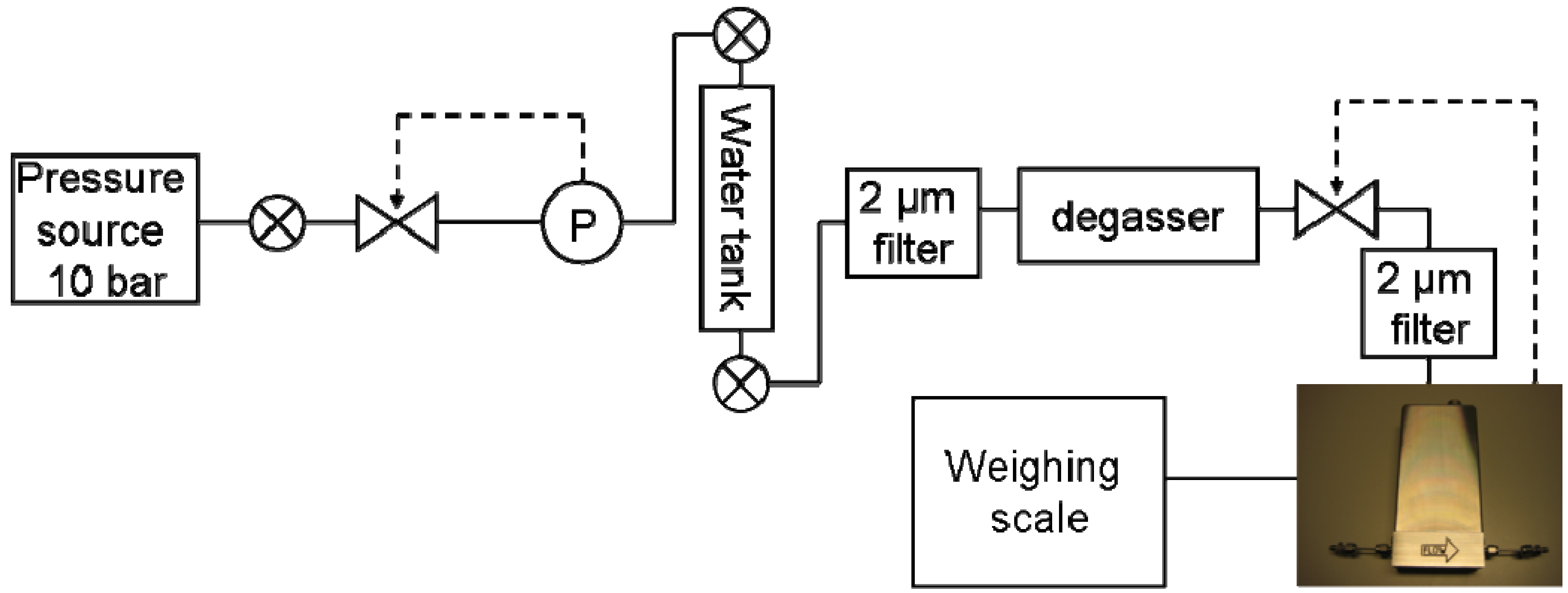
2.2.1. Pressure and Leak Tests
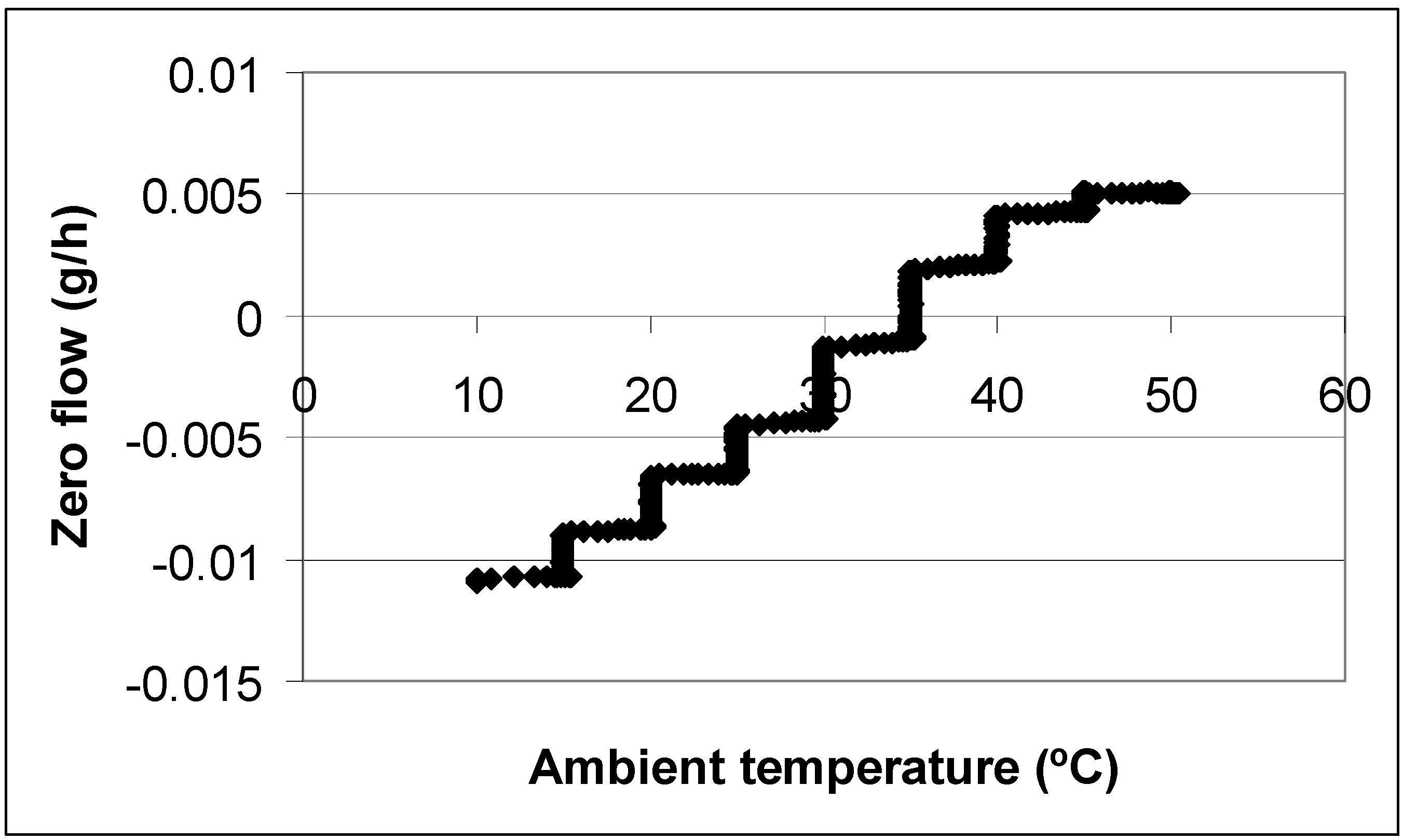
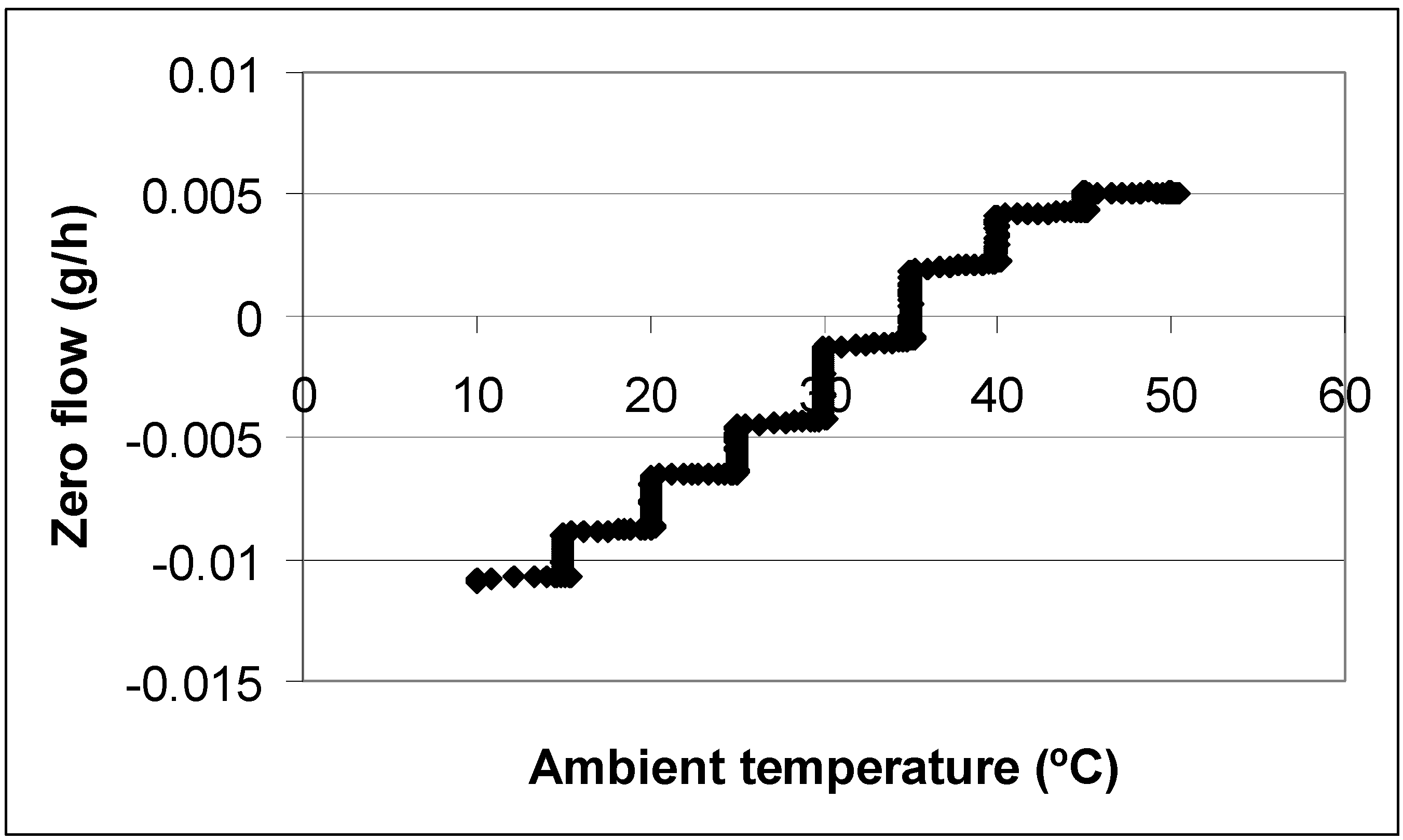
2.2.2. Temperature Coefficient
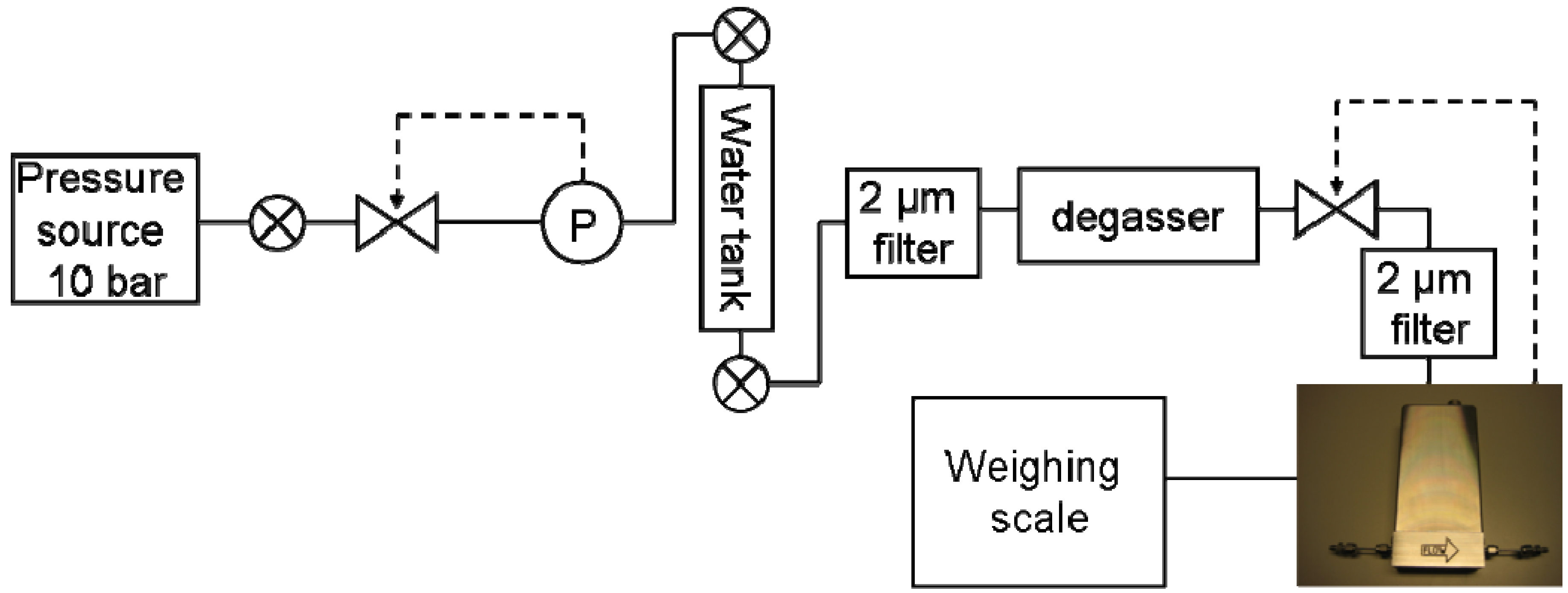
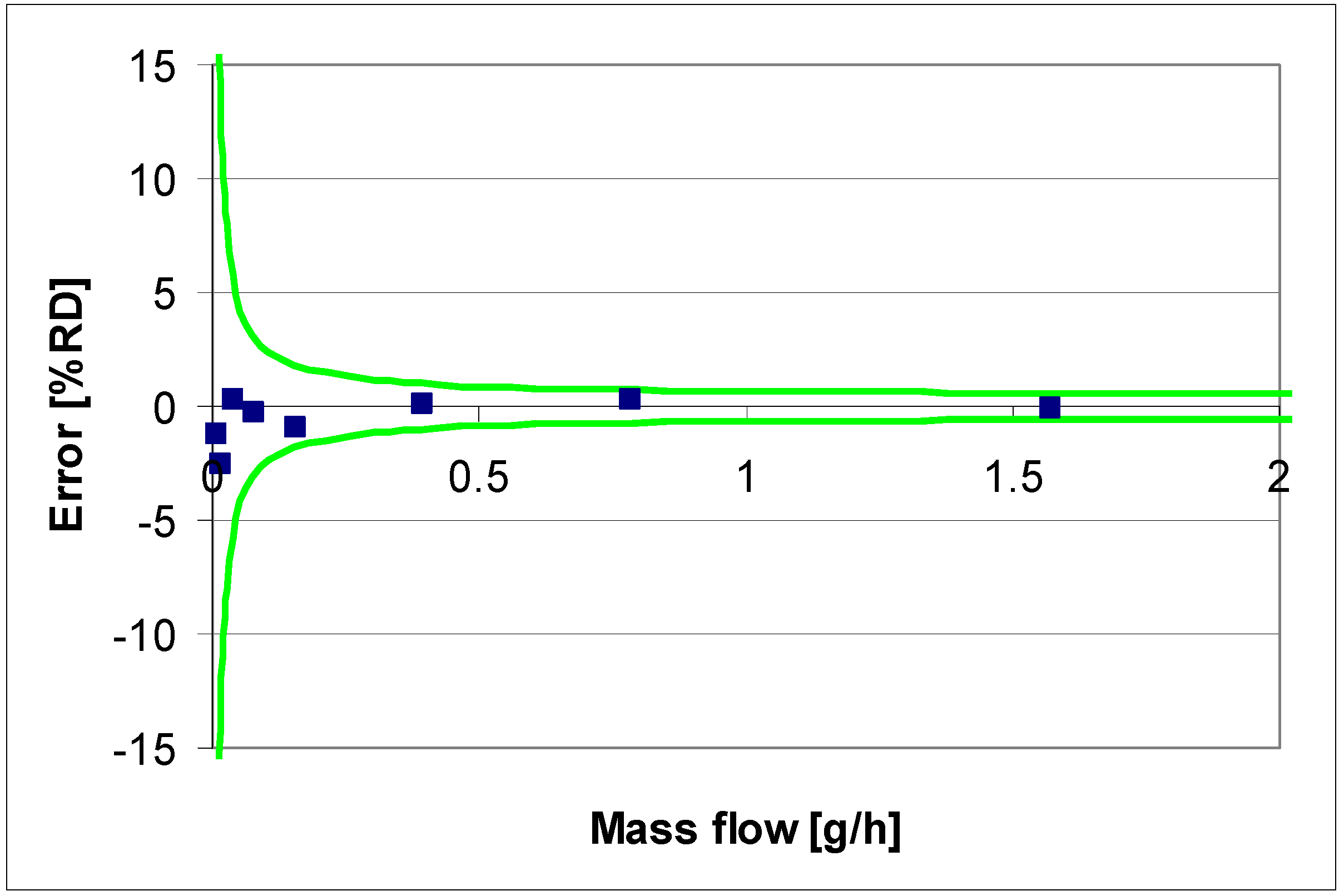
2.2.3. Mass Flow of Liquids
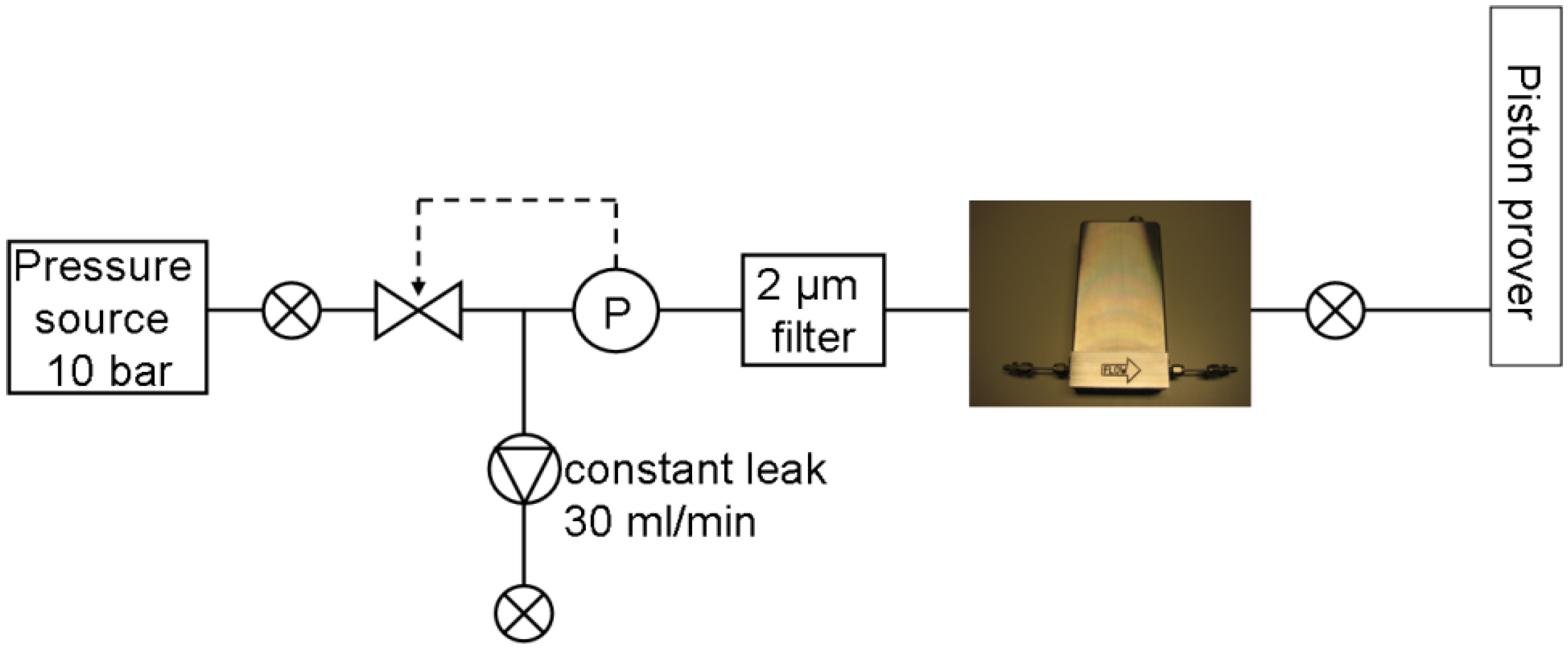
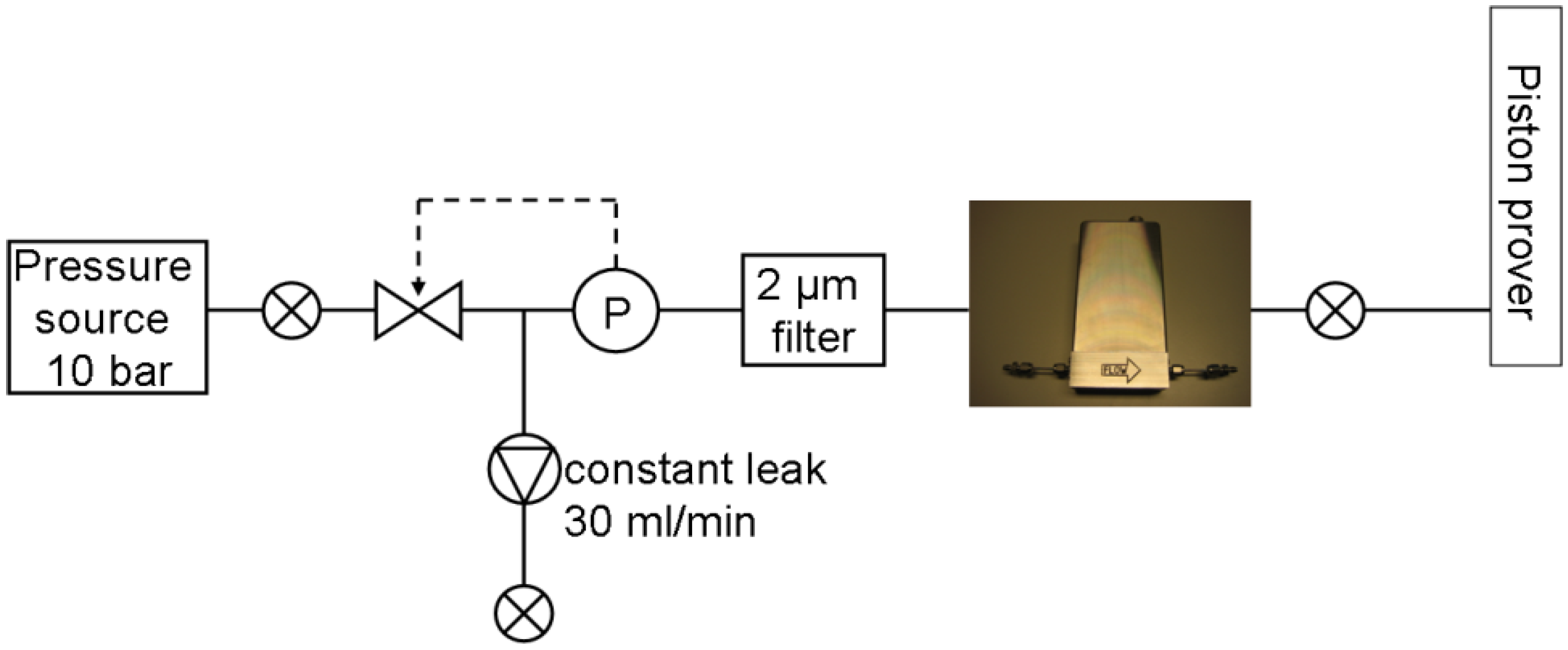
2.2.4. Mass Flow of Gases
2.2.5. Density of Gases
3. Results and Discussion
3.1. Pressure Tests and Leak Tests
3.2. Temperature Coefficient
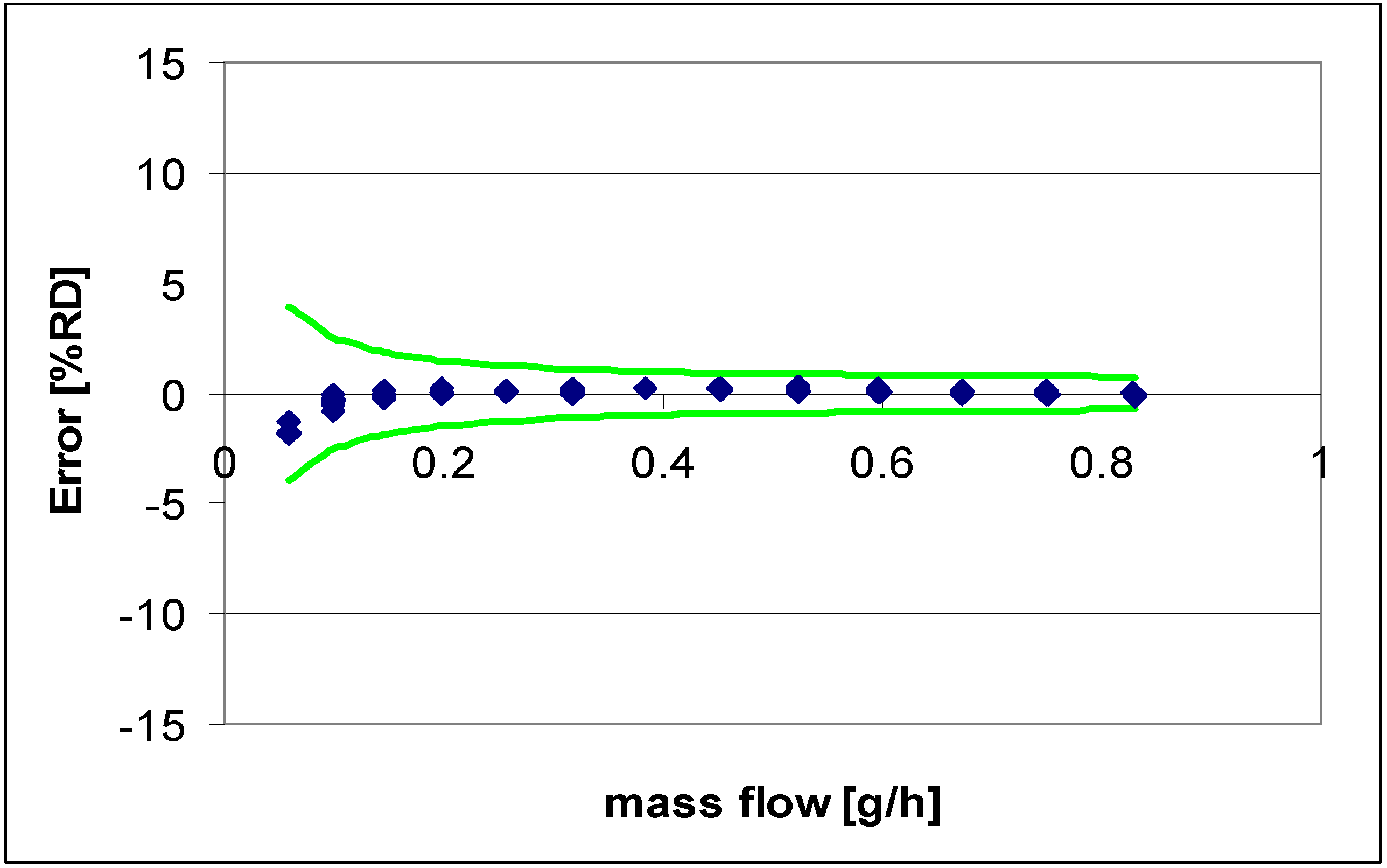
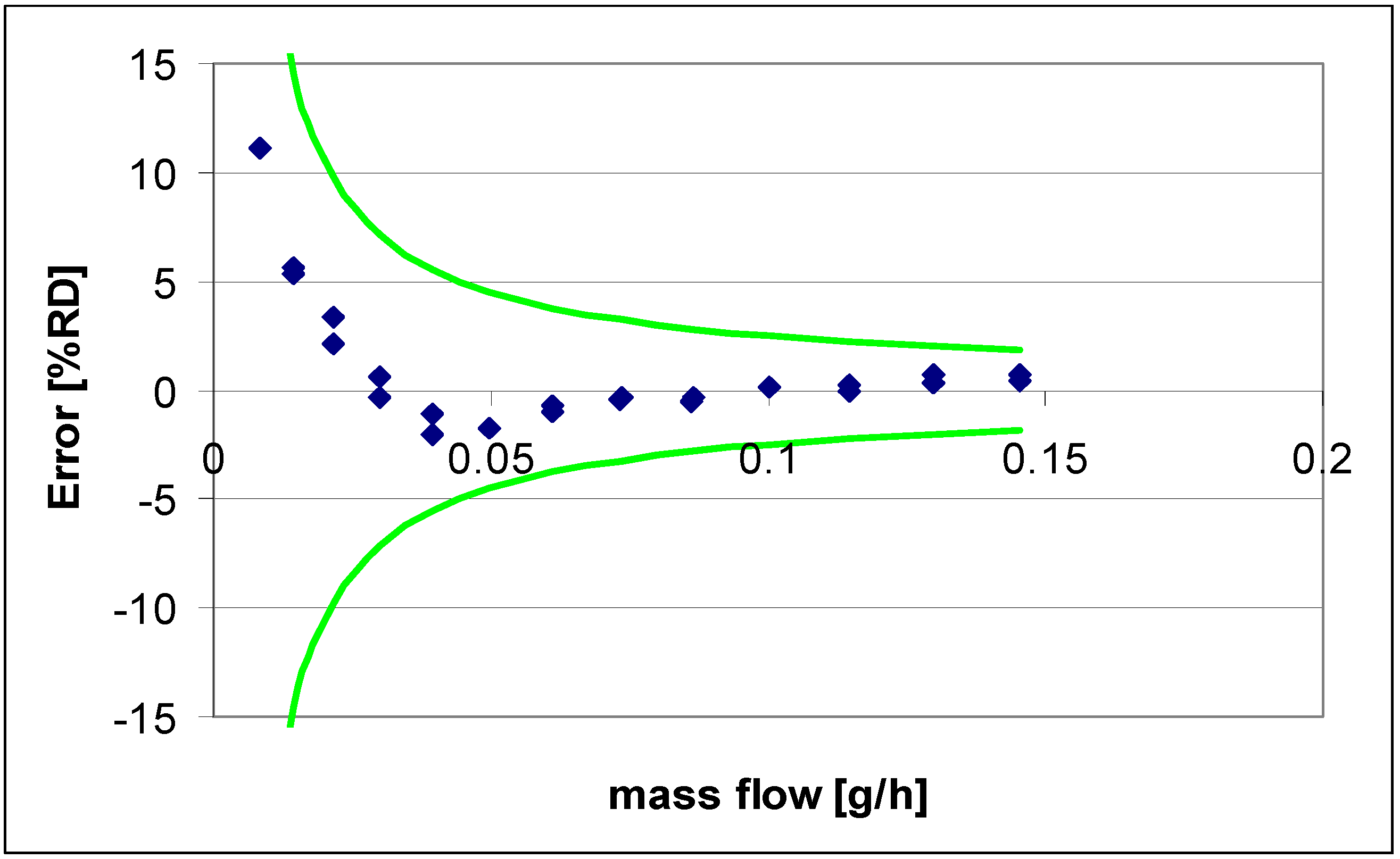
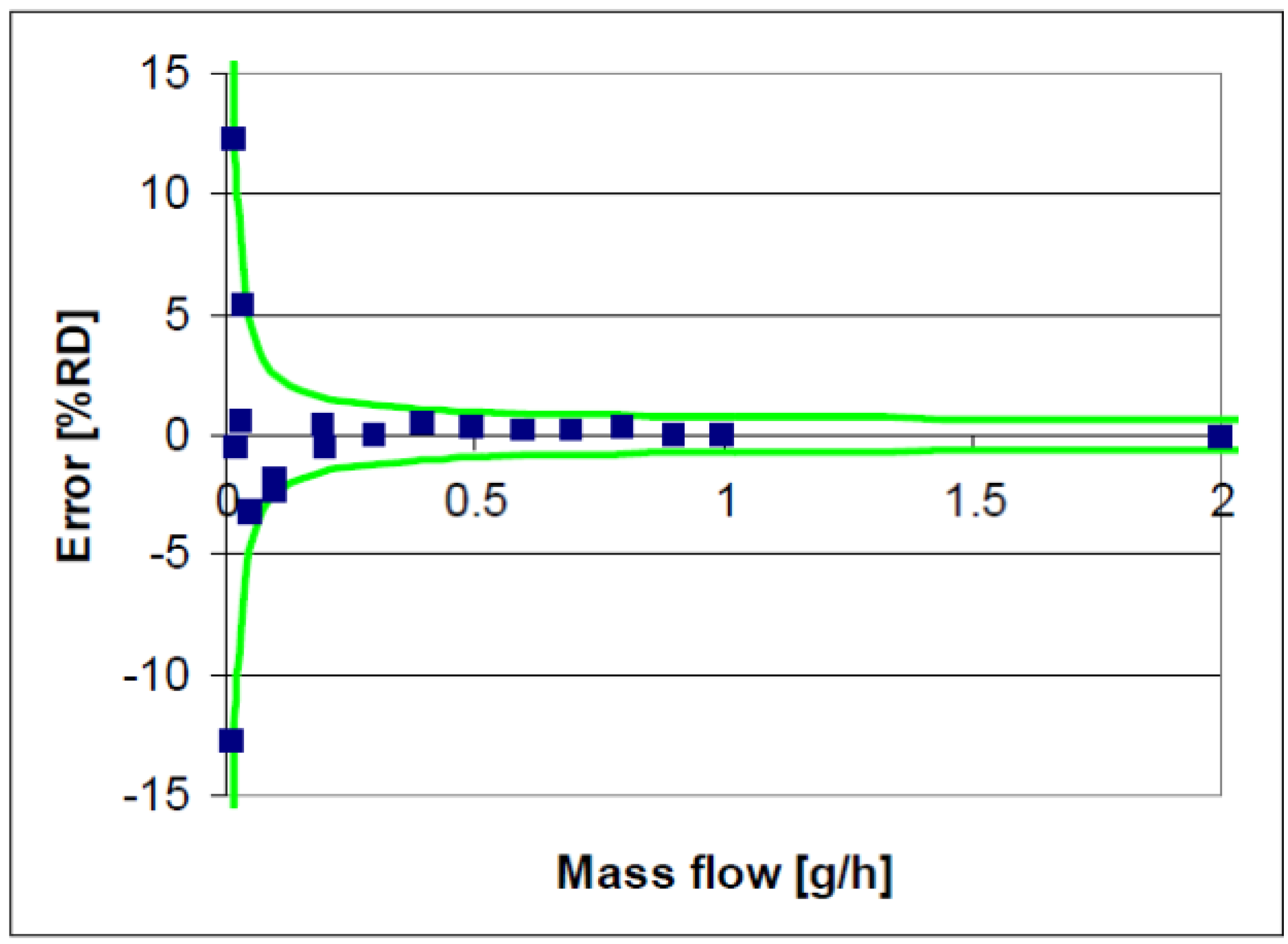
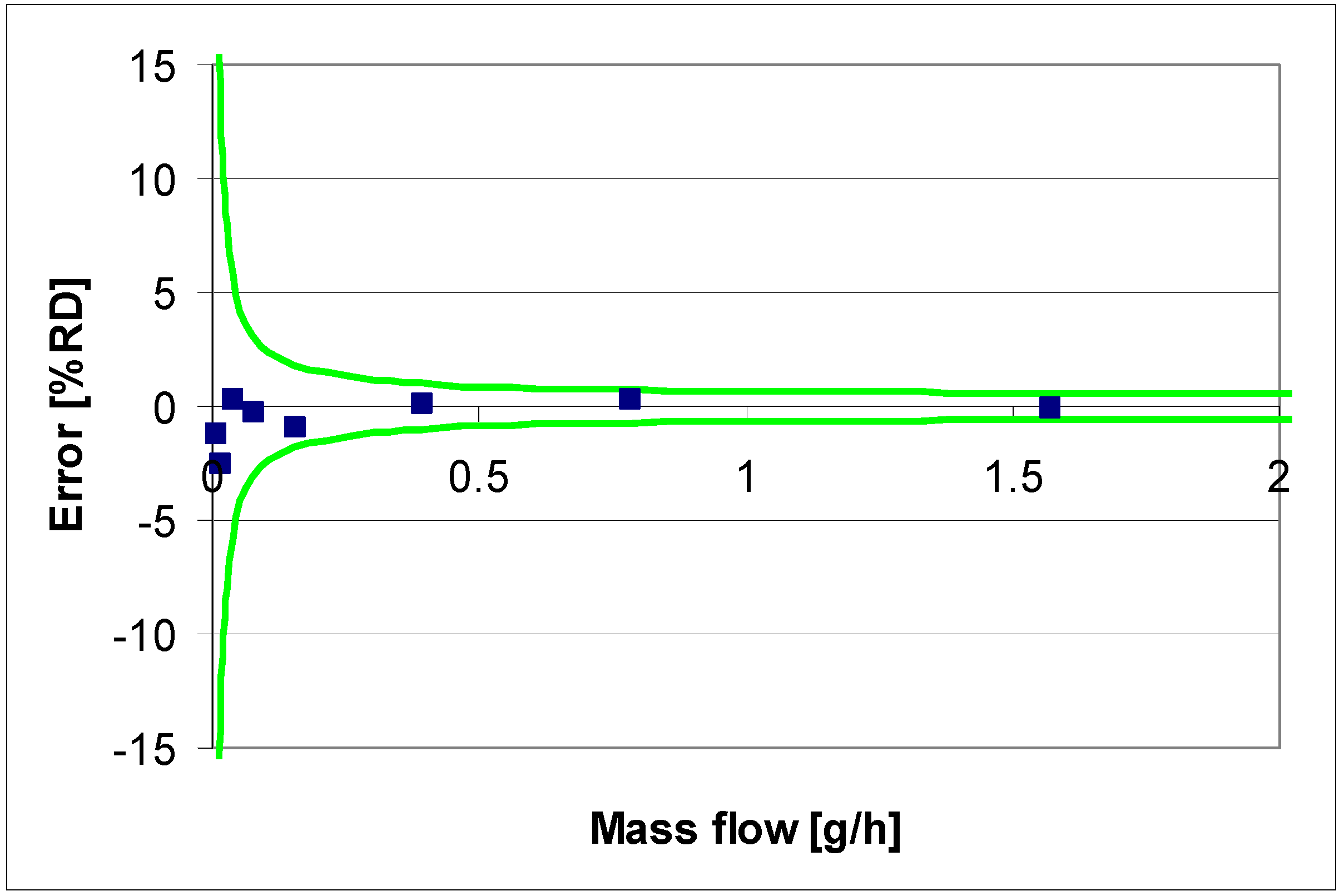
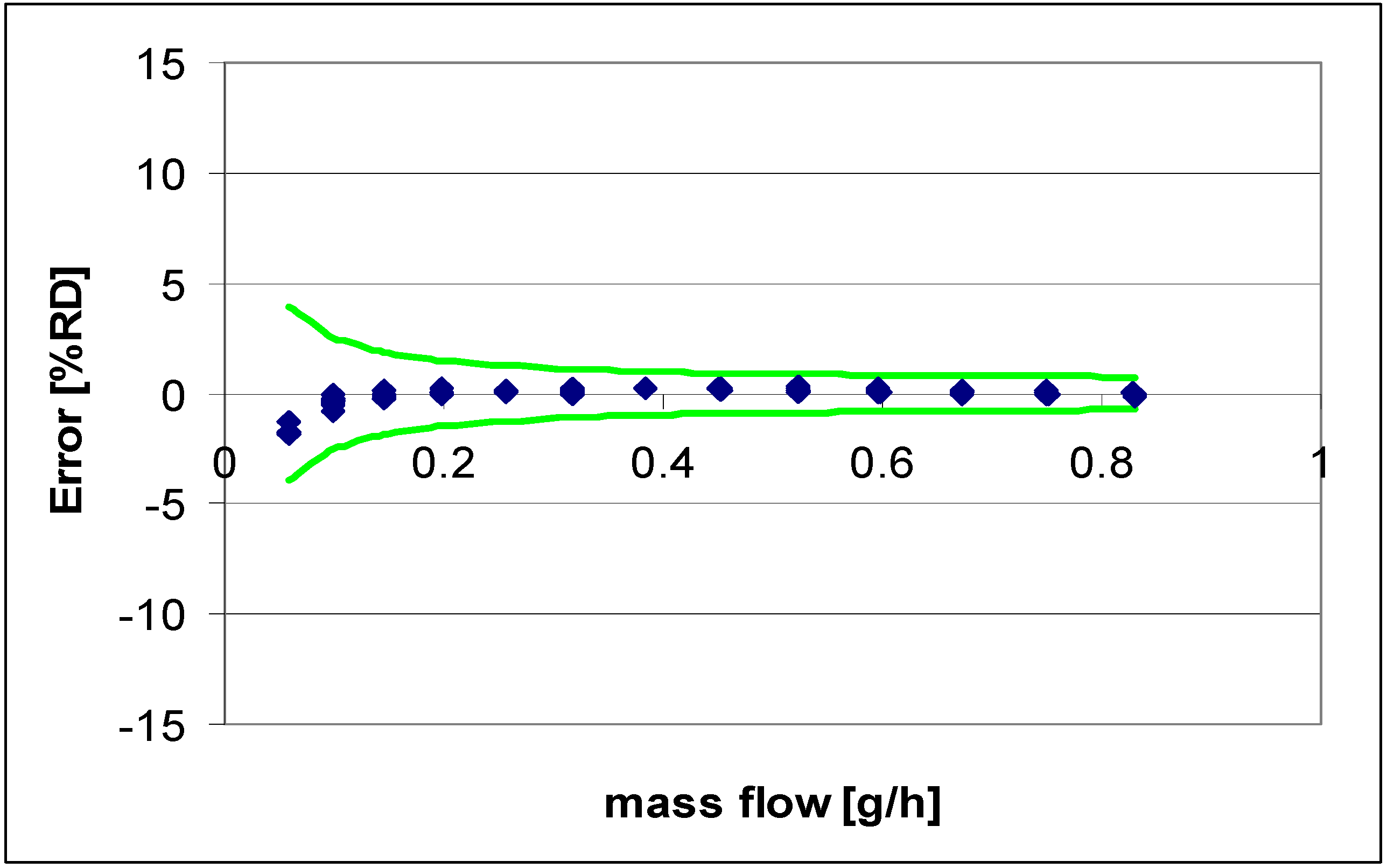
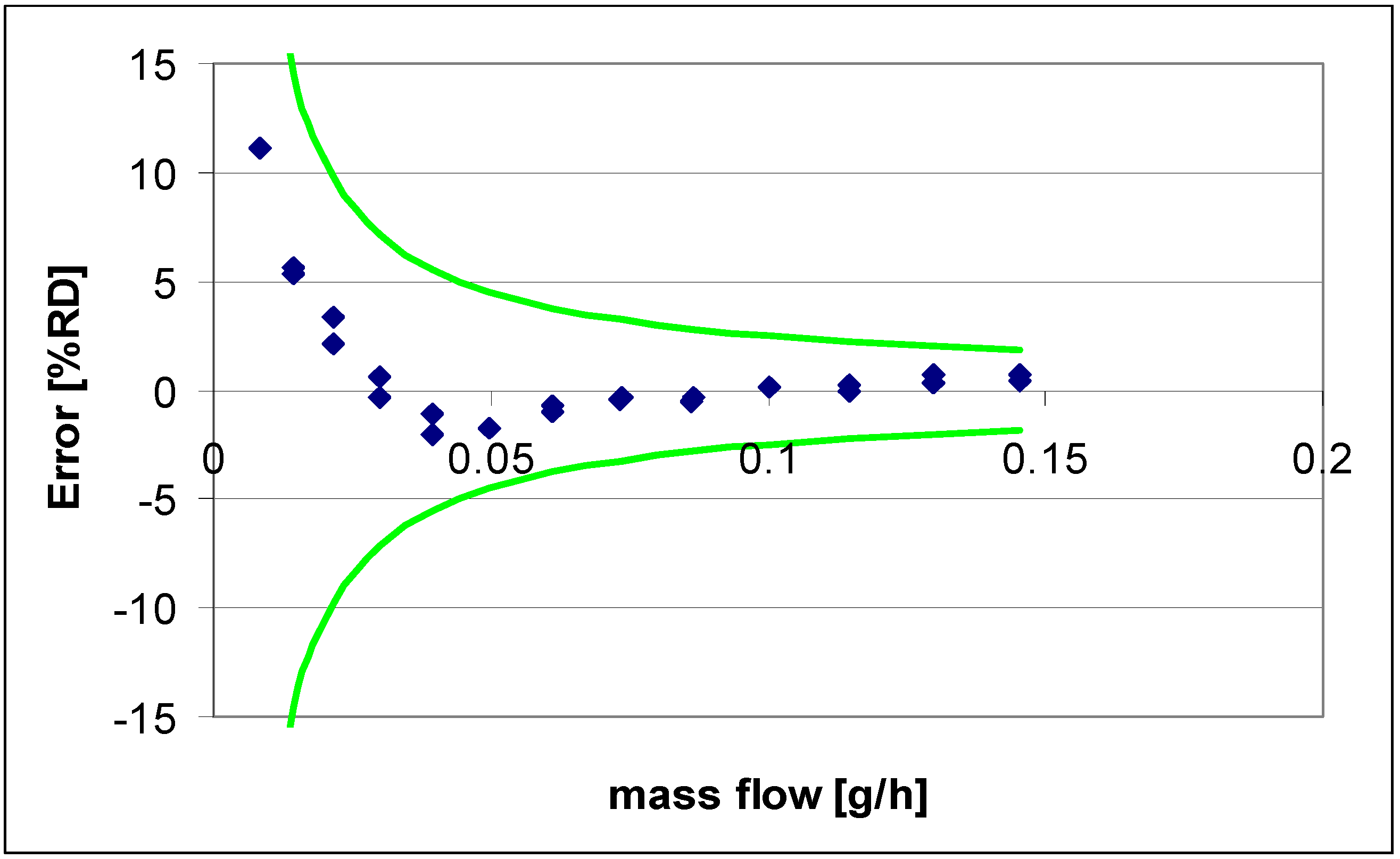
3.3. Mass Flow of Liquids

3.4. Mass Flow of Gases
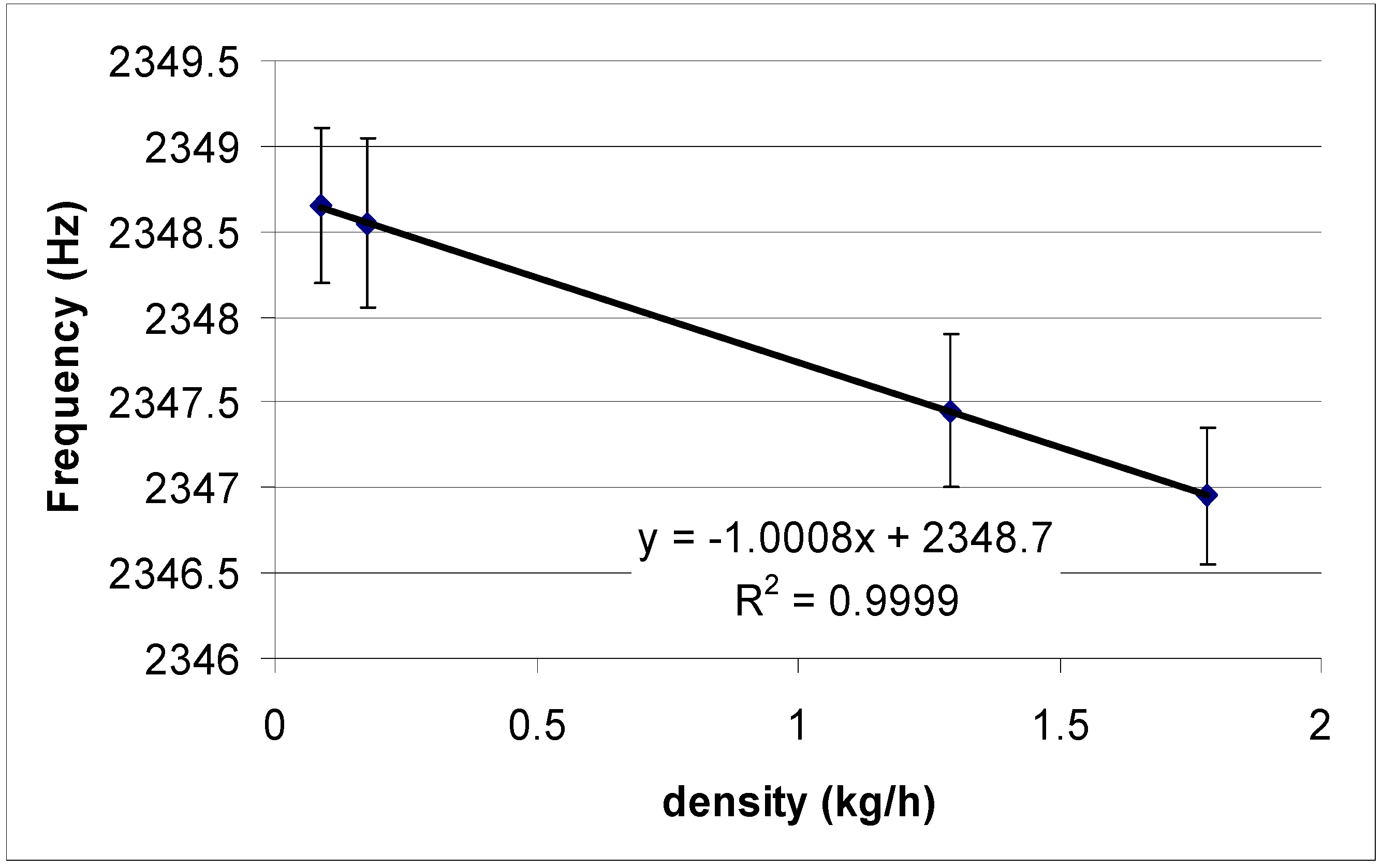
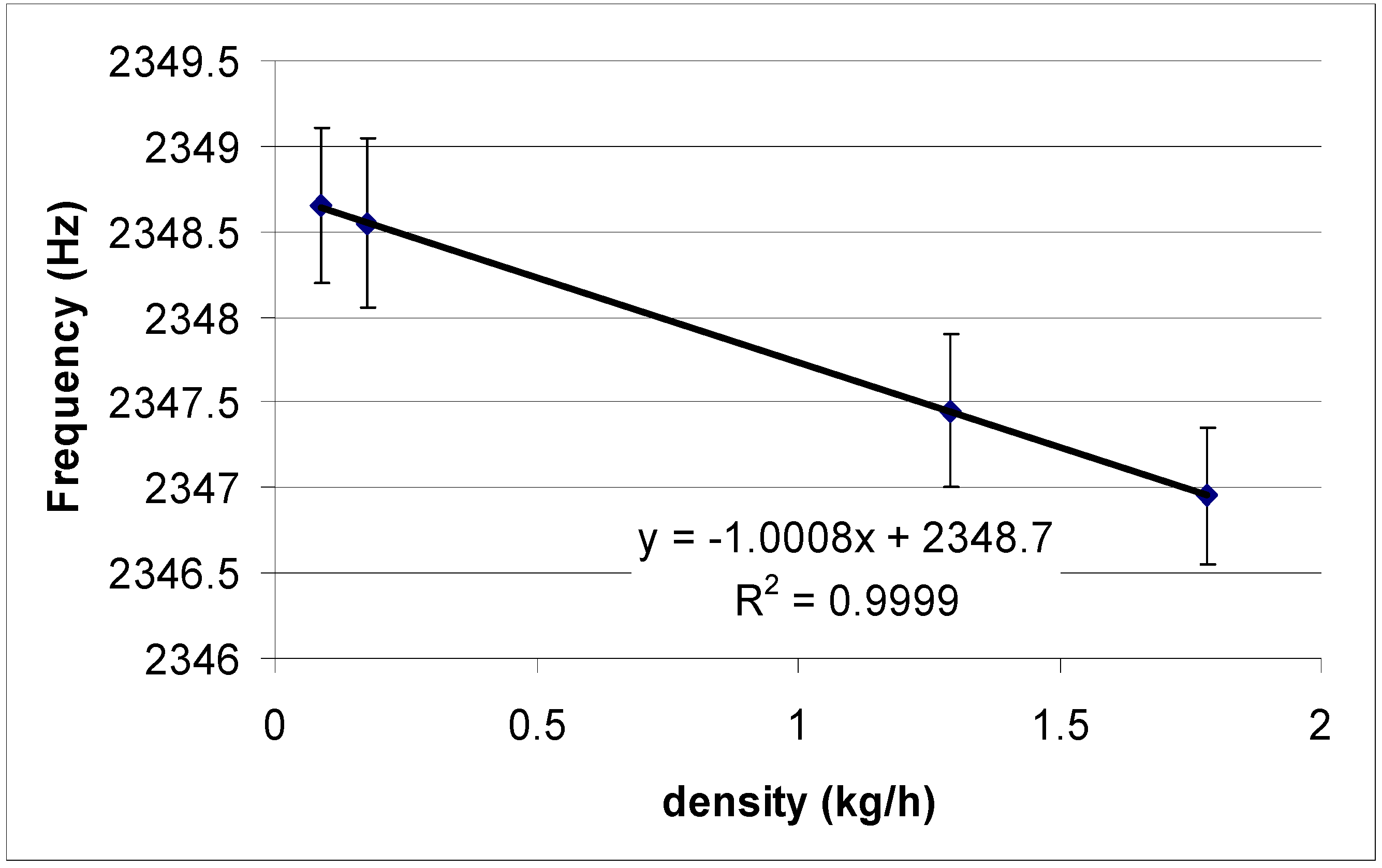
3.5. Density of Gases

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Density (kg/m3) | Frequency (Hz) | Min/Max (Hz) | |
|---|---|---|---|
| Argon | 1.78 | 2346.95 | 0.4 |
| Air | 1.29 | 2347.45 | 0.45 |
| Helium | 0.178 | 2348.55 | 0.5 |
| Hydrogen | 0.09 | 2348.65 | 0.45 |
4. Conclusions
Acknowledgments
References
- Whitesides, G.M. The origins and future of microfluidics. Nature 2006, 442, 368–373. [Google Scholar] [CrossRef]
- Nguyen, N.T. Micromachined flow sensors-a review. Flow Meas. Instrum. 1997, 8, 7–16. [Google Scholar] [CrossRef]
- Haneveld, J.; Lammerink, T.S.J.; Dijkstra, M.A.; Drogendijk, H.; de Boer, M.J.; Wiegerink, R.J. Highly sensitive micro coriolis mass flow sensor. In Proceedings of the 21st IEEE International Conference on Micro Electro Mechanical Systems, Tucson, AZ, USA, November 2008; pp. 920–923.
- Haneveld, J.; Lammerink, T.S.J.; de Boer, M.J.; Sanders, R.G.P.; Mehendale, A.; Lötters, J.C.; Dijkstra, M.; Wiegerink, R.J. Modeling, design, fabrication and characterization of a micro Coriolis mass flow sensor. J. Micromech. Microeng. 2010, 20. [Google Scholar] [CrossRef]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Sparreboom, W.; Van de Geest, J.; Katerberg, M.; Postma, F.; Haneveld, J.; Groenesteijn, J.; Lammerink, T.; Wiegerink, R.; Lötters, J. Compact Mass Flow Meter Based on a Micro Coriolis Flow Sensor. Micromachines 2013, 4, 22-33. https://doi.org/10.3390/mi4010022
Sparreboom W, Van de Geest J, Katerberg M, Postma F, Haneveld J, Groenesteijn J, Lammerink T, Wiegerink R, Lötters J. Compact Mass Flow Meter Based on a Micro Coriolis Flow Sensor. Micromachines. 2013; 4(1):22-33. https://doi.org/10.3390/mi4010022
Chicago/Turabian StyleSparreboom, Wouter, Jan Van de Geest, Marcel Katerberg, Ferry Postma, Jeroen Haneveld, Jarno Groenesteijn, Theo Lammerink, Remco Wiegerink, and Joost Lötters. 2013. "Compact Mass Flow Meter Based on a Micro Coriolis Flow Sensor" Micromachines 4, no. 1: 22-33. https://doi.org/10.3390/mi4010022
APA StyleSparreboom, W., Van de Geest, J., Katerberg, M., Postma, F., Haneveld, J., Groenesteijn, J., Lammerink, T., Wiegerink, R., & Lötters, J. (2013). Compact Mass Flow Meter Based on a Micro Coriolis Flow Sensor. Micromachines, 4(1), 22-33. https://doi.org/10.3390/mi4010022