
Recent Advances in Microrobots Powered by Multi-Physics Field for Biomedical and Environmental Applications


 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
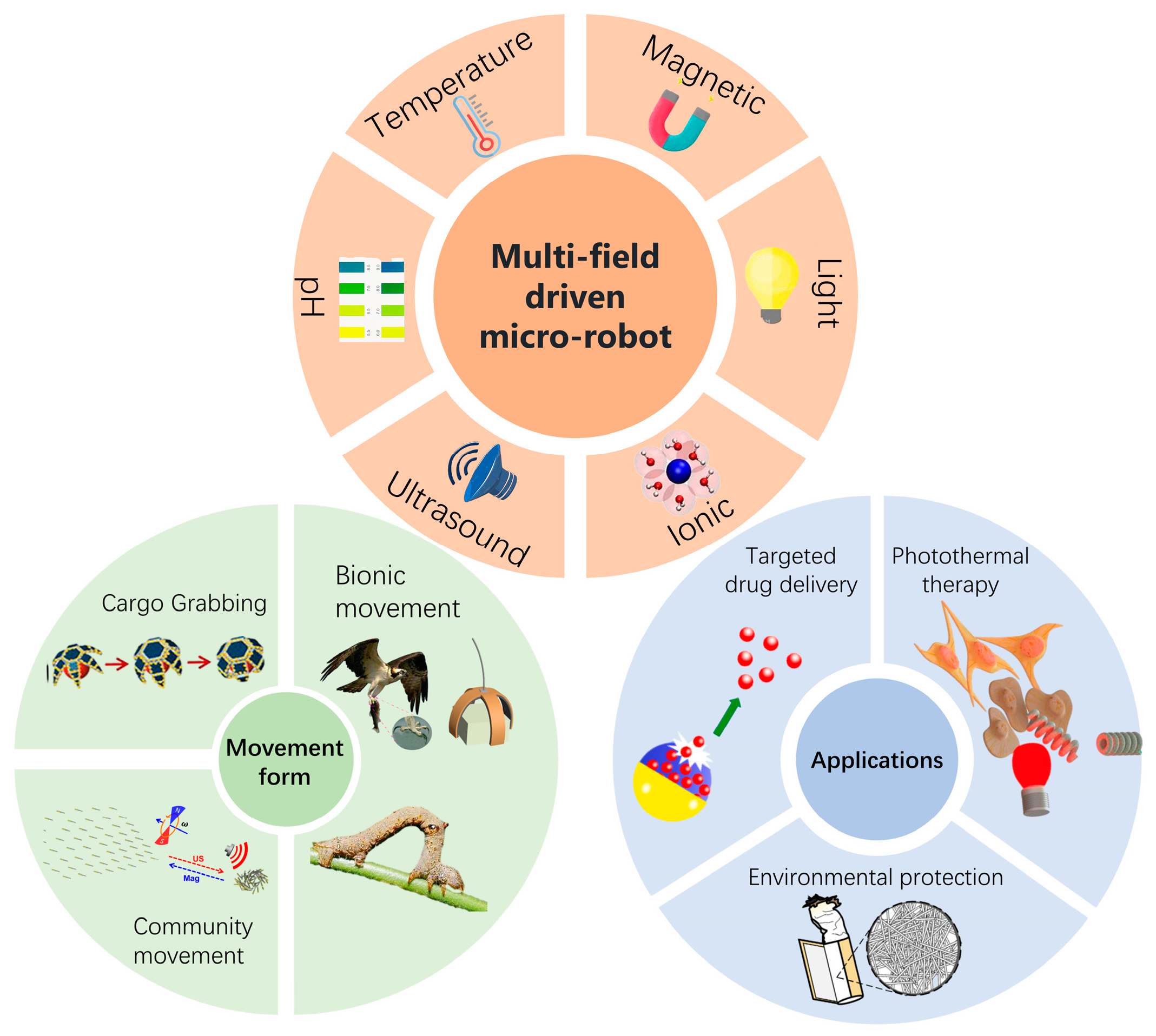
2. Classification of Microrobots Powered by Multi-Physics Fields
2.1. Microrobots Powered by Dual-Physics Fields
2.1.1. Microrobots Powered by Magnetic and pH

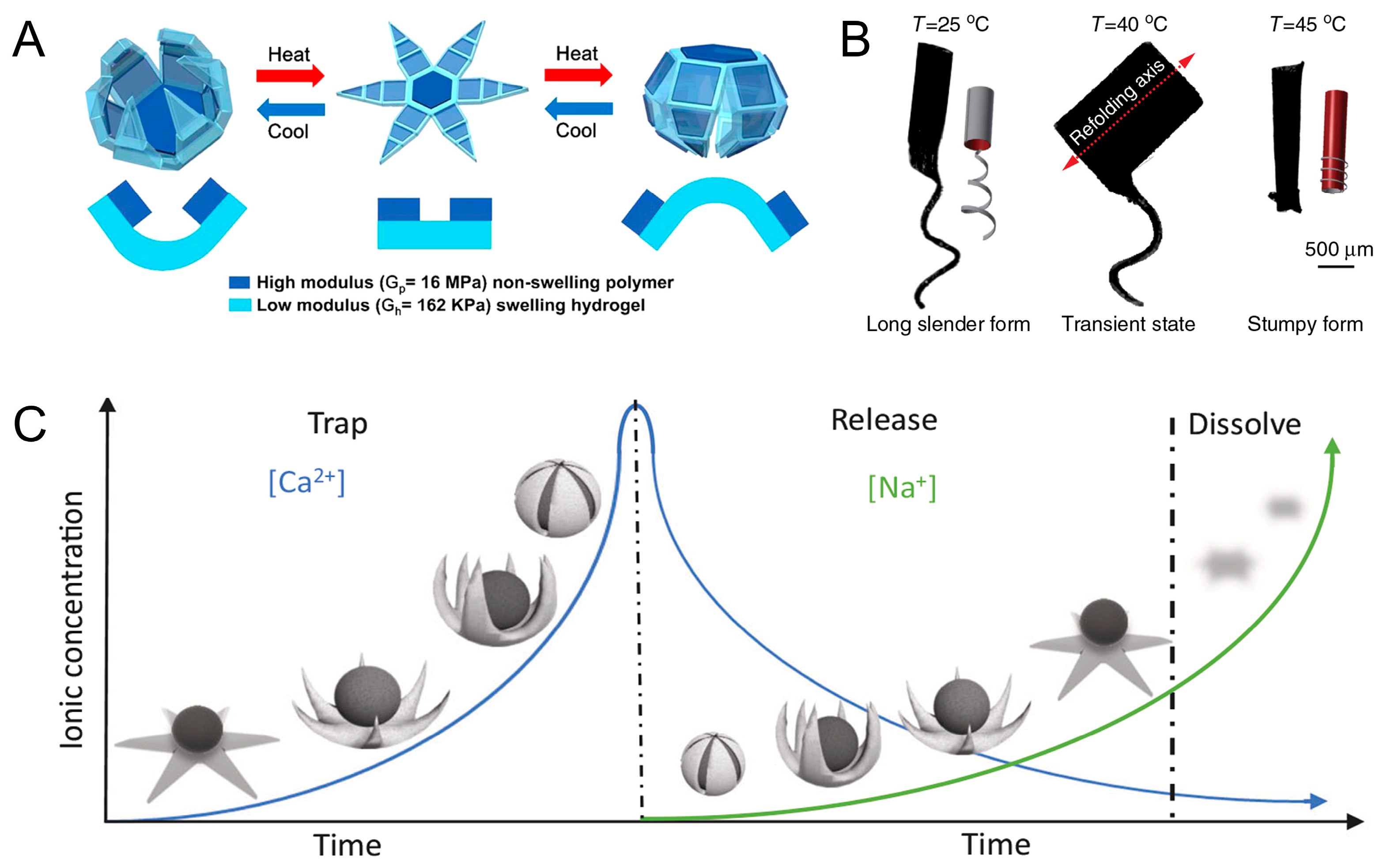
2.1.2. Microrobots Powered by Magnetic and Temperature
2.1.3. Microrobots Powered by Magnetic and Ionic
2.1.4. Microrobots Powered by Light and Magnetic Fields
2.1.5. Microrobots Powered by Light and pH
2.1.6. Microrobots Powered by Ultrasound and Magnetic Fields
2.1.7. Microrobots Powered by Light and Ultrasonic Fields
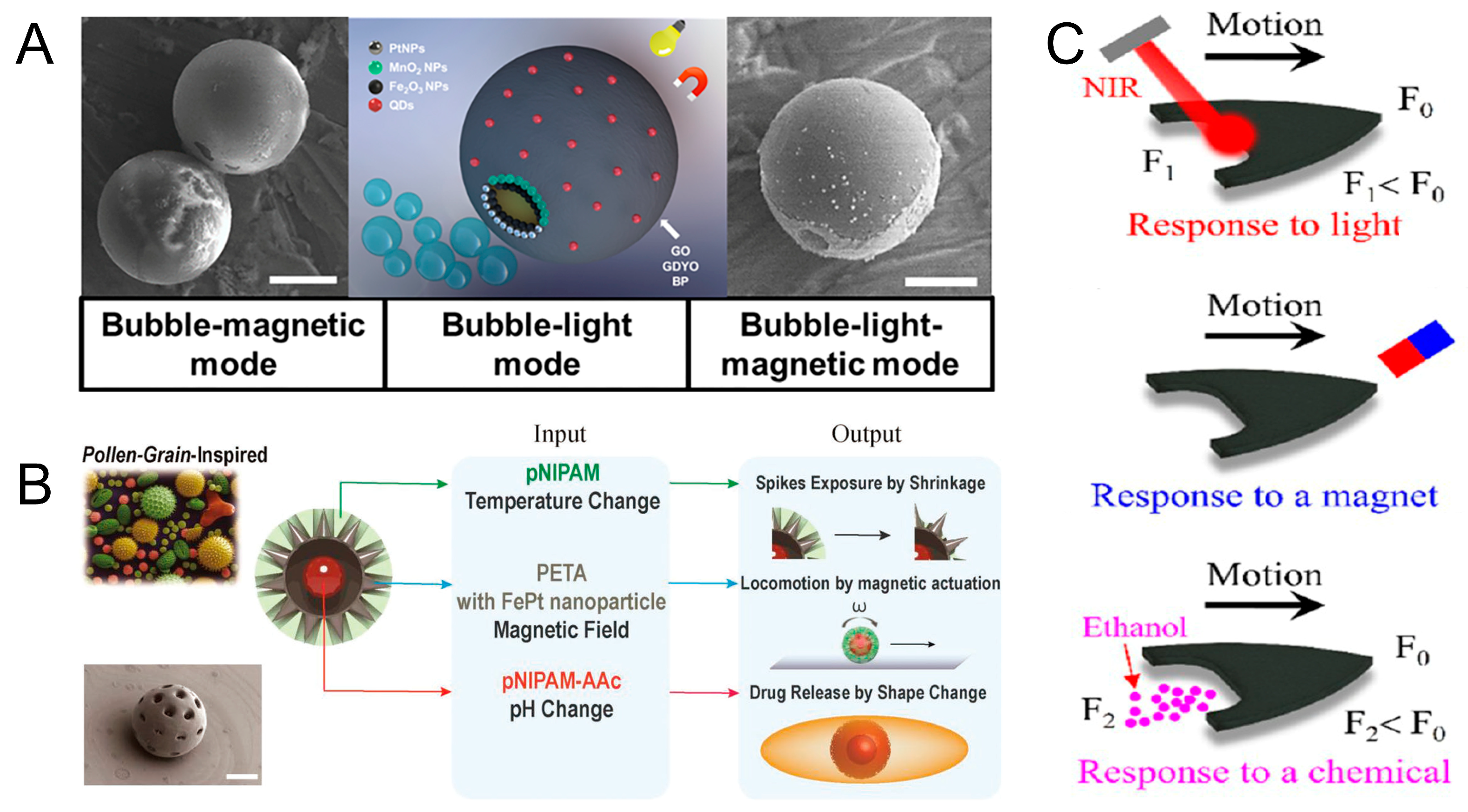
2.2. Microrobots Powered by Three-Physics Fields
3. Action form of Microrobot
3.1. Grabbing, Transporting, and Releasing Cargo
3.2. Collective Movement
3.3. Biomimetic Microrobots
4. Applications
4.1. Biomedical Application
4.1.1. Targeted Drug Delivery
4.1.2. Photothermal Therapy
4.2. Environmental Protection
5. Summary, Current Challenges, and Future Work
- The continuous progress of new materials will provide a strong driving force for the miniaturization and efficiency of microrobots. For example, the application of nanomaterials allows microrobots to achieve smaller sizes and lighter designs while increasing their strength and flexibility. This will make microrobots more refined in size while improving their performance and efficiency;
- The manufacturing technology of microrobots is also improving. The development of 3D printing technology has made the manufacturing process of microrobots more flexible and efficient, capable of achieving more complex structures and fine designs, thus further promoting the development of microrobots;
- Microrobots need to have greater perception and decision-making capabilities in order to respond flexibly in a changing environment. This will require microrobots to be able to pick up information about their surroundings and respond to it. This ability is important in the medical field. For example, targeted drug delivery to cancer cells can dramatically improve treatment effectiveness;
- Microrobots will become important tools in the field of biomedicine. For example, they can be used for drug delivery to precisely deliver drugs to diseased sites, thereby minimizing damage to healthy tissue. In addition, microrobots can also be used in minimally invasive surgery to enter the human body through tiny incisions for diagnosis and treatment, reducing patient pain and recovery time. As the technology develops, they will open up new possibilities for medical treatments;
- The application of microrobots will make important contributions to the cause of environmental protection. They can carry out environmental remediation work, such as cleaning sediment at the bottom and collecting floating marine debris. This will effectively improve the quality of the environment.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bilancia, P.; Schmidt, J.; Raffaeli, R.; Peruzzini, M.; Pellicciari, M. An Overview of Industrial Robots Control and Programming Approaches. Appl. Sci. 2023, 13, 2582. [Google Scholar] [CrossRef]
- Yang, W.; Wang, D. Can industrial robot applications help cross the middle-income trap?—Empirical evidence based on crossed-country panel data. Technol. Forecast. Soc. Chang. 2023, 192, 122583. [Google Scholar] [CrossRef]
- Ladeira, W.; Perin, M.G.; Santini, F. Acceptance of service robots: A meta-analysis in the hospitality and tourism industry. J. Hosp. Mark. Manag. 2023, 32, 694–716. [Google Scholar] [CrossRef]
- Lv, J.; Shen, H.; Fu, J. A New Phenomenon of Ni–Ti Alloys and Its Application for Fabricating Thermally Responsive Microrobots. Adv. Eng. Mater. 2021, 23, 2001367. [Google Scholar] [CrossRef]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Ma, Y.; Zhan, Z.; Hussain, D.; Hu, C. Robotic intracellular electrochemical sensing for adherent cells. Cyborg Bionic Syst. 2022, 2022, 9763420. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Hu, C.; Schurz, L.; De Marco, C.; Chen, X.; Pané, S.; Nelson, B.J. Surface-chemistry-mediated control of individual magnetic helical microswimmers in a swarm. ACS Nano 2018, 12, 6210–6217. [Google Scholar] [CrossRef]
- Lu, J.; Liu, Y.; Huang, W.; Bi, K.; Zhu, Y.; Fan, Q. Robust control strategy of gradient magnetic drive for microrobots based on extended state observer. Cyborg Bionic Syst. 2022, 2022, 9835014. [Google Scholar] [CrossRef]
- Liu, J.; Fu, Y.; Liu, X.; Ruan, H. Theoretical perspectives on natural and artificial micro-swimmers. Acta Mech. Solida Sin. 2021, 34, 783–809. [Google Scholar] [CrossRef]
- Cafarelli, A.; Marino, A.; Vannozzi, L.; Puigmartí-Luis, J.; Pané, S.; Ciofani, G.; Ricotti, L. Piezoelectric nanomaterials activated by ultrasound: The pathway from discovery to future clinical adoption. ACS Nano 2021, 15, 11066–11086. [Google Scholar] [CrossRef]
- Singh, A.V.; Hosseinidoust, Z.; Park, B.-W.; Yasa, O.; Sitti, M. Microemulsion-based soft bacteria-driven microswimmers for active cargo delivery. ACS Nano 2017, 11, 9759–9769. [Google Scholar] [CrossRef]
- Wang, Y.; Shen, J.; Handschuh-Wang, S.; Qiu, M.; Du, S.; Wang, B. Microrobots for Targeted Delivery and Therapy in Digestive System. ACS Nano 2022, 17, 27–50. [Google Scholar] [CrossRef]
- Wang, X.; Qin, X.-H.; Hu, C.; Terzopoulou, A.; Chen, X.-Z.; Huang, T.-Y.; Maniura-Weber, K.; Pané, S.; Nelson, B.J. 3D Printed Enzymatically Biodegradable Soft Helical Microswimmers. Adv. Funct. Mater. 2018, 28, 1804107. [Google Scholar] [CrossRef]
- Das, S.; Hunter, E.E.; DeLateur, N.A.; Steager, E.B.; Weiss, R.; Kumar, V. Cellular expression through morphogen delivery by light activated magnetic microrobots. J. Micro-Bio Robot. 2019, 15, 79–90. [Google Scholar] [CrossRef]
- Park, J.; Kim, J.-y.; Pané, S.; Nelson, B.J.; Choi, H. Acoustically Mediated Controlled Drug Release and Targeted Therapy with Degradable 3D Porous Magnetic Microrobots. Adv. Healthc. Mater. 2021, 10, 2001096. [Google Scholar] [CrossRef] [PubMed]
- Peng, X.; Urso, M.; Balvan, J.; Masarik, M.; Pumera, M. Self-Propelled Magnetic Dendrite-Shaped Microrobots for Photodynamic Prostate Cancer Therapy. Angew. Chem. Int. Ed. 2022, 61, e202213505. [Google Scholar] [CrossRef]
- Lee, Y.-W.; Ceylan, H.; Yasa, I.C.; Kilic, U.; Sitti, M. 3D-Printed Multi-Stimuli-Responsive Mobile Micromachines. ACS Appl. Mater. Interfaces 2021, 13, 12759–12766. [Google Scholar] [CrossRef] [PubMed]
- Ma, C.; Le, X.; Tang, X.; He, J.; Xiao, P.; Zheng, J.; Xiao, H.; Lu, W.; Zhang, J.; Huang, Y. A multiresponsive anisotropic hydrogel with macroscopic 3D complex deformations. Adv. Funct. Mater. 2016, 26, 8670–8676. [Google Scholar] [CrossRef]
- Dekanovsky, L.; Ying, Y.; Zelenka, J.; Plutnar, J.; Beladi-Mousavi, S.M.; Křížová, I.; Novotný, F.; Ruml, T.; Pumera, M. Fully Programmable Collective Behavior of Light-Powered Chemical Microrobotics: pH-Dependent Motion Behavior Switch and Controlled Cancer Cell Destruction. Adv. Funct. Mater. 2022, 32, 2205062. [Google Scholar] [CrossRef]
- Wu, Z.; Li, T.; Li, J.; Gao, W.; Xu, T.; Christianson, C.; Gao, W.; Galarnyk, M.; He, Q.; Zhang, L.; et al. Turning Erythrocytes into Functional Micromotors. ACS Nano 2014, 8, 12041–12048. [Google Scholar] [CrossRef]
- Kong, L.; Feng, Y.; Luo, W.; Mou, F.; Ying, K.; Pu, Y.; You, M.; Fang, K.; Ma, H.; Guan, J. Self-Adaptive Magnetic Photonic Nanochain Cilia Arrays. Adv. Funct. Mater. 2020, 30, 2005243. [Google Scholar] [CrossRef]
- Chen, X.-Z.; Liu, J.-H.; Dong, M.; Müller, L.; Chatzipirpiridis, G.; Hu, C.; Terzopoulou, A.; Torlakcik, H.; Wang, X.; Mushtaq, F. Magnetically driven piezoelectric soft microswimmers for neuron-like cell delivery and neuronal differentiation. Mater. Horiz. 2019, 6, 1512–1516. [Google Scholar] [CrossRef]
- Mo, C.; Li, G.; Bian, X. Challenges and attempts to make intelligent microswimmers. Fron. Phys. 2023, 11, 1279883. [Google Scholar] [CrossRef]
- Zou, Z.; Liu, Y.; Tsang, A.C.; Young, Y.-N.; Pak, O.S. Adaptive micro-locomotion in a dynamically changing environment via context detection. Commun. Nonlinear Sci. Numer. Simul. 2024, 128, 107666. [Google Scholar] [CrossRef]
- Tsang, A.C.; Demir, E.; Ding, Y.; Pak, O.S. Roads to smart artificial microswimmers. Adv. Intell. Syst. 2020, 2, 1900137. [Google Scholar] [CrossRef]
- Behrens, M.R.; Ruder, W.C. Smart magnetic microrobots learn to swim with deep reinforcement learning. Adv. Intell. Syst. 2022, 4, 2200023. [Google Scholar] [CrossRef] [PubMed]
- Bunea, A.-I.; Taboryski, R. Recent advances in microswimmers for biomedical applications. Micromachines 2020, 11, 1048. [Google Scholar] [CrossRef]
- Li, J.; Yu, J. Biodegradable microrobots and their biomedical applications: A review. Nanomaterials 2023, 13, 1590. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Wang, J. The environmental impact of micro/nanomachines: A review. ACS Nano 2014, 8, 3170–3180. [Google Scholar] [CrossRef]
- Ongaro, F.; Scheggi, S.; Yoon, C.; den Brink, F.v.; Oh, S.H.; Gracias, D.H.; Misra, S. Autonomous planning and control of soft untethered grippers in unstructured environments. J. Micro-Bio Robot. 2017, 12, 45–52. [Google Scholar] [CrossRef]
- Li, J.; Li, T.; Xu, T.; Kiristi, M.; Liu, W.; Wu, Z.; Wang, J. Magneto–Acoustic Hybrid Nanomotor. Nano Lett. 2015, 15, 4814–4821. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Wang, J.; Guo, X.; Yang, S.; Ozen, M.O.; Chen, P.; Liu, X.; Du, W.; Xiao, F.; Demirci, U.; et al. Multi-stimuli-responsive programmable biomimetic actuator. Nat. Commun. 2019, 10, 4087. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Huang, X.; Wang, B.; Tan, L.; Zhang, Y.; Jiao, Y. Light/gas cascade-propelled Janus micromotors that actively overcome sequential and multi-staged biological barriers for precise drug delivery. Chem. Eng. J. 2021, 408, 127897. [Google Scholar] [CrossRef]
- De la Asunción-Nadal, V.; Franco, C.; Veciana, A.; Ning, S.; Terzopoulou, A.; Sevim, S.; Chen, X.-Z.; Gong, D.; Cai, J.; Wendel-Garcia, P.D.; et al. MoSBOTs: Magnetically Driven Biotemplated MoS2-Based Microrobots for Biomedical Applications. Small 2022, 18, 2203821. [Google Scholar] [CrossRef] [PubMed]
- Dekanovsky, L.; Huang, H.; Akir, S.; Ying, Y.; Sofer, Z.; Khezri, B. Light-Driven MXene-Based Microrobots: Mineralization of Bisphenol A to CO2 and H2O. Small Methods 2023, 7, 2201547. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Go, G.; Ko, S.Y.; Park, J.-O.; Park, S. Magnetic actuated pH-responsive hydrogel-based soft micro-robot for targeted drug delivery. Smart Mater. Struct. 2016, 25, 27001. [Google Scholar] [CrossRef]
- Ye, M.; Zhou, Y.; Zhao, H.; Wang, X. Magnetic Microrobots with Folate Targeting for Drug Delivery. Cyborg Bionic Syst. 2023, 4, 19. [Google Scholar] [CrossRef] [PubMed]
- Jin, D.; Wang, Q.; Chan, K.F.; Xia, N.; Yang, H.; Wang, Q.; Yu, S.C.H.; Zhang, L. Swarming self-adhesive microgels enabled aneurysm on-demand embolization in physiological blood flow. Sci. Adv. 2023, 9, eadf9278. [Google Scholar] [CrossRef] [PubMed]
- Bernasconi, R.; Mauri, E.; Rossetti, A.; Rimondo, S.; Suriano, R.; Levi, M.; Sacchetti, A.; Pané, S.; Magagnin, L.; Rossi, F. 3D integration of pH-cleavable drug-hydrogel conjugates on magnetically driven smart microtransporters. Mater. Des. 2021, 197, 109212. [Google Scholar] [CrossRef]
- Yu, Z.; Li, L.; Mou, F.; Yu, S.; Zhang, D.; Yang, M.; Zhao, Q.; Ma, H.; Luo, W.; Li, T.; et al. Swarming magnetic photonic-crystal microrobots with on-the-fly visual pH detection and self-regulated drug delivery. InfoMat 2023, 5, e12464. [Google Scholar] [CrossRef]
- Terzopoulou, A.; Wang, X.; Chen, X.-Z.; Palacios-Corella, M.; Pujante, C.; Herrero-Martín, J.; Qin, X.-H.; Sort, J.; deMello, A.J.; Nelson, B.J.; et al. Biodegradable Metal–Organic Framework-Based Microrobots (MOFBOTs). Adv. Healthc. Mater. 2020, 9, 2001031. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Chen, X.-Z.; Alcântara, C.C.J.; Sevim, S.; Hoop, M.; Terzopoulou, A.; de Marco, C.; Hu, C.; de Mello, A.J.; Falcaro, P.; et al. MOFBOTS: Metal–Organic-Framework-Based Biomedical Microrobots. Adv. Mater. 2019, 31, 1901592. [Google Scholar] [CrossRef] [PubMed]
- Maria-Hormigos, R.; Mayorga-Martinez, C.C.; Pumera, M. Magnetic Hydrogel Microrobots as Insecticide Carriers for In Vivo Insect Pest Control in Plants. Small 2022, 19, e2204887. [Google Scholar] [CrossRef] [PubMed]
- Breger, J.C.; Yoon, C.; Xiao, R.; Kwag, H.R.; Wang, M.O.; Fisher, J.P.; Nguyen, T.D.; Gracias, D.H. Self-Folding Thermo-Magnetically Responsive Soft Microgrippers. ACS Appl. Mater. Interfaces 2015, 7, 3398–3405. [Google Scholar] [CrossRef] [PubMed]
- Huang, H.-W.; Sakar, M.S.; Petruska, A.J.; Pané, S.; Nelson, B.J. Soft micromachines with programmable motility and morphology. Nat. Commun. 2016, 7, 12263. [Google Scholar] [CrossRef] [PubMed]
- Hen-Wei, H.; Sakar, M.S.; Riederer, K.; Shamsudhin, N.; Petruska, A.; Pané, S.; Nelson, B.J. Magnetic microrobots with addressable shape control. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 1719–1724. [Google Scholar]
- Yoshida, K.; Onoe, H. Soft Spiral-Shaped Microswimmers for Autonomous Swimming Control by Detecting Surrounding Environments. Adv. Intell. Syst. 2020, 2, 2000095. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, H.; Dong, L.; Shi, Q.; Li, J.; Sun, T.; Huang, Q.; Fukuda, T. Ionic shape-morphing microrobotic end-effectors for environmentally adaptive targeting, releasing, and sampling. Nat. Commun. 2021, 12, 411. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Yang, Y.; Yang, X.; Yang, L.; Shen, Y.; Shang, W. Multi-functionalized micro-helical capsule robots with superior loading and releasing capabilities. J. Mater. Chem. B 2021, 9, 1441–1451. [Google Scholar] [CrossRef]
- Xing, J.; Yin, T.; Li, S.; Xu, T.; Ma, A.; Chen, Z.; Luo, Y.; Lai, Z.; Lv, Y.; Pan, H.; et al. Sequential Magneto-Actuated and Optics-Triggered Biomicrorobots for Targeted Cancer Therapy. Adv. Funct. Mater. 2021, 31, 2008262. [Google Scholar] [CrossRef]
- Akolpoglu, M.B.; Alapan, Y.; Dogan, N.O.; Baltaci, S.F.; Yasa, O.; Aybar Tural, G.; Sitti, M. Magnetically steerable bacterial microrobots moving in 3D biological matrices for stimuli-responsive cargo delivery. Sci. Adv. 2022, 8, eabo6163. [Google Scholar] [CrossRef]
- Villa, K.; Vyskočil, J.; Ying, Y.; Zelenka, J.; Pumera, M. Microrobots in Brewery: Dual Magnetic/Light-Powered Hybrid Microrobots for Preventing Microbial Contamination in Beer. Chem. Eur. J. 2020, 26, 3039–3043. [Google Scholar] [CrossRef] [PubMed]
- Bozuyuk, U.; Yasa, O.; Yasa, I.C.; Ceylan, H.; Kizilel, S.; Sitti, M. Light-Triggered Drug Release from 3D-Printed Magnetic Chitosan Microswimmers. ACS Nano 2018, 12, 9617–9625. [Google Scholar] [CrossRef] [PubMed]
- Maria-Hormigos, R.; Mayorga-Martinez, C.C.; Pumera, M. Soft Magnetic Microrobots for Photoactive Pollutant Removal. Small Methods 2023, 7, 2201014. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.-I.; Lee, H.; Kwon, S.-H.; Choi, H.; Park, S. Magnetic nano-particles retrievable biodegradable hydrogel microrobot. Sens. Actuators B Chem. 2019, 289, 65–77. [Google Scholar] [CrossRef]
- Kim, D.-I.; Lee, H.; Kwon, S.-H.; Sung, Y.J.; Song, W.K.; Park, S. Bilayer Hydrogel Sheet-Type Intraocular Microrobot for Drug Delivery and Magnetic Nanoparticles Retrieval. Adv. Healthc. Mater. 2020, 9, 2000118. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Kim, D.-i.; Kwon, S.-h.; Park, S. Magnetically Actuated Drug Delivery Helical Microrobot with Magnetic Nanoparticle Retrieval Ability. ACS Appl. Mater. Interfaces 2021, 13, 19633–19647. [Google Scholar] [CrossRef] [PubMed]
- Power, M.; Anastasova, S.; Shanel, S.; Yang, G.Z. Towards hybrid microrobots using pH- and photo-responsive hydrogels for cancer targeting and drug delivery. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 6002–6007. [Google Scholar]
- Ahmed, D.; Baasch, T.; Blondel, N.; Läubli, N.; Dual, J.; Nelson, B.J. Neutrophil-inspired propulsion in a combined acoustic and magnetic field. Nat. Commun. 2017, 8, 770. [Google Scholar] [CrossRef] [PubMed]
- Ahmed, D.; Dillinger, C.; Hong, A.; Nelson, B.J. Artificial Acousto-Magnetic Soft Microswimmers. Adv. Mater. Technol. 2017, 2, 1700050. [Google Scholar] [CrossRef]
- Ren, L.; Nama, N.; McNeill, J.M.; Soto, F.; Yan, Z.; Liu, W.; Wang, W.; Wang, J.; Mallouk, T.E. 3D steerable, acoustically powered microswimmers for single-particle manipulation. Sci. Adv. 2019, 5, eaax3084. [Google Scholar] [CrossRef]
- Tang, S.; Zhang, F.; Zhao, J.; Talaat, W.; Soto, F.; Karshalev, E.; Chen, C.; Hu, Z.; Lu, X.; Li, J.; et al. Structure-Dependent Optical Modulation of Propulsion and Collective Behavior of Acoustic/Light-Driven Hybrid Microbowls. Adv. Funct. Mater. 2019, 29, 1809003. [Google Scholar] [CrossRef]
- Garcia-Gradilla, V.; Sattayasamitsathit, S.; Soto, F.; Kuralay, F.; Yardımcı, C.; Wiitala, D.; Galarnyk, M.; Wang, J. Ultrasound-Propelled Nanoporous Gold Wire for Efficient Drug Loading and Release. Small 2014, 10, 4154–4159. [Google Scholar] [CrossRef] [PubMed]
- Han, B.; Gao, Y.-Y.; Zhang, Y.-L.; Liu, Y.-Q.; Ma, Z.-C.; Guo, Q.; Zhu, L.; Chen, Q.-D.; Sun, H.-B. Multi-field-coupling energy conversion for flexible manipulation of graphene-based soft robots. Nano Energy 2020, 71, 104578. [Google Scholar] [CrossRef]
- Yuan, K.; de la Asunción-Nadal, V.; Jurado-Sánchez, B.; Escarpa, A. 2D Nanomaterials Wrapped Janus Micromotors with Built-in Multiengines for Bubble, Magnetic, and Light Driven Propulsion. Chem. Mater. 2020, 32, 1983–1992. [Google Scholar] [CrossRef]
- Lee, Y.-W.; Kim, J.-K.; Bozuyuk, U.; Dogan, N.O.; Khan, M.T.A.; Shiva, A.; Wild, A.-M.; Sitti, M. Multifunctional 3D-Printed Pollen Grain-Inspired Hydrogel Microrobots for On-Demand Anchoring and Cargo Delivery. Adv. Mater. 2023, 35, 2209812. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Lin, D.; Zhou, Y.; Jiao, N.; Tung, S.; Liu, L. Multistimuli-Responsive Hydroplaning Superhydrophobic Microrobots with Programmable Motion and Multifunctional Applications. ACS Nano 2022, 16, 14895–14906. [Google Scholar] [CrossRef]
- Alapan, Y.; Yasa, O.; Schauer, O.; Giltinan, J.; Tabak, A.F.; Sourjik, V.; Sitti, M. Soft erythrocyte-based bacterial microswimmers for cargo delivery. Sci. Robot. 2018, 3, eaar4423. [Google Scholar] [CrossRef]
- Pilz da Cunha, M.; Foelen, Y.; van Raak, R.J.H.; Murphy, J.N.; Engels, T.A.P.; Debije, M.G.; Schenning, A.P.H.J. An Untethered Magnetic- and Light-Responsive Rotary Gripper: Shedding Light on Photoresponsive Liquid Crystal Actuators. Adv. Opt. Mater. 2019, 7, 1801643. [Google Scholar] [CrossRef]
- Lu, X.; Shen, H.; Wei, Y.; Ge, H.; Wang, J.; Peng, H.; Liu, W. Ultrafast Growth and Locomotion of Dandelion-Like Microswarms with Tubular Micromotors. Small 2020, 16, 2003678. [Google Scholar] [CrossRef]
- Zheng, Z.; Wang, H.; Demir, S.O.; Huang, Q.; Fukuda, T.; Sitti, M. Programmable aniso-electrodeposited modular hydrogel microrobots. Sci. Adv. 2022, 8, eade6135. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, R.; Tan, W.; Yang, L.; Lv, X.; Wang, X.; Wang, F.; Zhang, C. Graphene oxide and low-density polyethylene based highly sensitive biomimetic soft actuators powered by multiple clean energies of humidity and light. J. Mater. Chem. A 2023, 11, 15670–15680. [Google Scholar] [CrossRef]
- Zhao, F.; Rong, W.; Wang, L.; Sun, L. Photothermal-Responsive Shape-Memory Magnetic Helical Microrobots with Programmable Addressable Shape Changes. ACS Appl. Mater. Interfaces 2023, 15, 25942–25951. [Google Scholar] [CrossRef]
- Ussia, M.; Urso, M.; Kratochvilova, M.; Navratil, J.; Balvan, J.; Mayorga-Martinez, C.C.; Vyskocil, J.; Masarik, M.; Pumera, M. Magnetically Driven Self-Degrading Zinc-Containing Cystine Microrobots for Treatment of Prostate Cancer. Small 2023, 19, 2208259. [Google Scholar] [CrossRef]
- Wu, Z.; Li, L.; Yang, Y.; Hu, P.; Li, Y.; Yang, S.-Y.; Wang, L.V.; Gao, W. A microrobotic system guided by photoacoustic computed tomography for targeted navigation in intestines in vivo. Sci. Robot. 2019, 4, eaax0613. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Choi, H.; Lee, M.; Park, S. Preliminary study on alginate/NIPAM hydrogel-based soft microrobot for controlled drug delivery using electromagnetic actuation and near-infrared stimulus. Biomed. Microdevices 2018, 20, 103. [Google Scholar] [CrossRef]
- Fusco, S.; Huang, H.-W.; Peyer, K.E.; Peters, C.; Häberli, M.; Ulbers, A.; Spyrogianni, A.; Pellicer, E.; Sort, J.; Pratsinis, S.E.; et al. Shape-Switching Microrobots for Medical Applications: The Influence of Shape in Drug Delivery and Locomotion. ACS Appl. Mater. Interfaces 2015, 7, 6803–6811. [Google Scholar] [CrossRef] [PubMed]
- Ceylan, H.; Yasa, I.C.; Yasa, O.; Tabak, A.F.; Giltinan, J.; Sitti, M. 3D-Printed Biodegradable Microswimmer for Theranostic Cargo Delivery and Release. ACS Nano 2019, 13, 3353–3362. [Google Scholar] [CrossRef] [PubMed]
- Esteban-Fernández de Ávila, B.; Ramírez-Herrera, D.E.; Campuzano, S.; Angsantikul, P.; Zhang, L.; Wang, J. Nanomotor-Enabled pH-Responsive Intracellular Delivery of Caspase-3: Toward Rapid Cell Apoptosis. ACS Nano 2017, 11, 5367–5374. [Google Scholar] [CrossRef]
- Wang, T.; Yin, Q.; Huang, H.y.; Wang, Z.; Song, H.; Luo, X. Probiotic Escherichia coli Nissle 1917 propelled micro-robot with pH sensitivity for hypoxia targeted intestinal tumor therapy. Colloids Surf. B Biointerfaces 2023, 225, 113277. [Google Scholar] [CrossRef]
- Lee, H.; Park, S. Magnetically Actuated Helical Microrobot with Magnetic Nanoparticle Retrieval and Sequential Dual-Drug Release Abilities. ACS Appl. Mater. Interfaces 2023, 15, 27471–27485. [Google Scholar] [CrossRef]
- Gong, D.; Celi, N.; Xu, L.; Zhang, D.; Cai, J. CuS nanodots-loaded biohybrid magnetic helical microrobots with enhanced photothermal performance. Mater. Today Chem. 2022, 23, 100694. [Google Scholar] [CrossRef]
- Xie, L.; Pang, X.; Yan, X.; Dai, Q.; Lin, H.; Ye, J.; Cheng, Y.; Zhao, Q.; Ma, X.; Zhang, X.; et al. Photoacoustic Imaging-Trackable Magnetic Microswimmers for Pathogenic Bacterial Infection Treatment. ACS Nano 2020, 14, 2880–2893. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Cai, J.; Sun, L.; Zhang, S.; Gong, D.; Li, X.; Yue, S.; Feng, L.; Zhang, D. Facile Fabrication of Magnetic Microrobots Based on Spirulina Templates for Targeted Delivery and Synergistic Chemo-Photothermal Therapy. ACS Appl. Mater. Interfaces 2019, 11, 4745–4756. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Gao, C.; Wang, W.; Sun, M.; Guo, B.; Xie, H.; He, Q. Shape-Transformable, Fusible Rodlike Swimming Liquid Metal Nanomachine. ACS Nano 2018, 12, 10212–10220. [Google Scholar] [CrossRef] [PubMed]
- Dekanovsky, L.; Khezri, B.; Rottnerova, Z.; Novotny, F.; Plutnar, J.; Pumera, M. Chemically programmable microrobots weaving a web from hormones. Nat. Mach. Intell. 2020, 2, 711–718. [Google Scholar] [CrossRef]
- Wang, L.; Kaeppler, A.; Fischer, D.; Simmchen, J. Photocatalytic TiO2 micromotors for removal of microplastics and suspended matter. ACS Appl. Mater. Interfaces 2019, 11, 32937–32944. [Google Scholar] [CrossRef] [PubMed]
- Mayorga-Burrezo, P.; Mayorga-Martinez, C.C.; Pumera, M. Photocatalysis dramatically influences motion of magnetic microrobots: Application to removal of microplastics and dyes. J. Colloid Interface Sci. 2023, 643, 447–454. [Google Scholar] [CrossRef]
- Dong, Y.; Yi, C.; Yang, S.; Wang, J.; Chen, P.; Liu, X.; Du, W.; Wang, S.; Liu, B.-F. A substrate-free graphene oxide-based micromotor for rapid adsorption of antibiotics. Nanoscale 2019, 11, 4562–4570. [Google Scholar] [CrossRef] [PubMed]
- Mushtaq, F.; Chen, X.; Staufert, S.; Torlakcik, H.; Wang, X.; Hoop, M.; Gerber, A.; Li, X.; Cai, J.; Nelson, B.J. On-the-fly catalytic degradation of organic pollutants using magneto-photoresponsive bacteria-templated microcleaners. J. Mater. Chem. A 2019, 7, 24847–24856. [Google Scholar] [CrossRef]
- Liu, Y.-M.; Wang, W.; Zheng, W.-C.; Ju, X.-J.; Xie, R.; Zerrouki, D.; Deng, N.-N.; Chu, L.-Y. Hydrogel-Based Microactuators with Remote-Controlled Locomotion and Fast Pb2+-Response for Micromanipulation. ACS Appl. Mater. Interfaces 2013, 5, 7219–7226. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Teng, X.; Qiao, Z.; Yu, S.; Liu, Y.; Lou, X.; Zhang, H.; Ge, Z.; Yang, W. Recent Advances in Microrobots Powered by Multi-Physics Field for Biomedical and Environmental Applications. Micromachines 2024, 15, 492. https://doi.org/10.3390/mi15040492
Teng X, Qiao Z, Yu S, Liu Y, Lou X, Zhang H, Ge Z, Yang W. Recent Advances in Microrobots Powered by Multi-Physics Field for Biomedical and Environmental Applications. Micromachines. 2024; 15(4):492. https://doi.org/10.3390/mi15040492
Chicago/Turabian StyleTeng, Xiangyu, Zezheng Qiao, Shuxuan Yu, Yujie Liu, Xinyu Lou, Huanbin Zhang, Zhixing Ge, and Wenguang Yang. 2024. "Recent Advances in Microrobots Powered by Multi-Physics Field for Biomedical and Environmental Applications" Micromachines 15, no. 4: 492. https://doi.org/10.3390/mi15040492
APA StyleTeng, X., Qiao, Z., Yu, S., Liu, Y., Lou, X., Zhang, H., Ge, Z., & Yang, W. (2024). Recent Advances in Microrobots Powered by Multi-Physics Field for Biomedical and Environmental Applications. Micromachines, 15(4), 492. https://doi.org/10.3390/mi15040492