

A High-Resolution 3D Ultrasound Imaging System Oriented towards a Specific Application in Breast Cancer Detection Based on a 1 × 256 Ring Array

 , and
, and
Abstract
1. Introduction
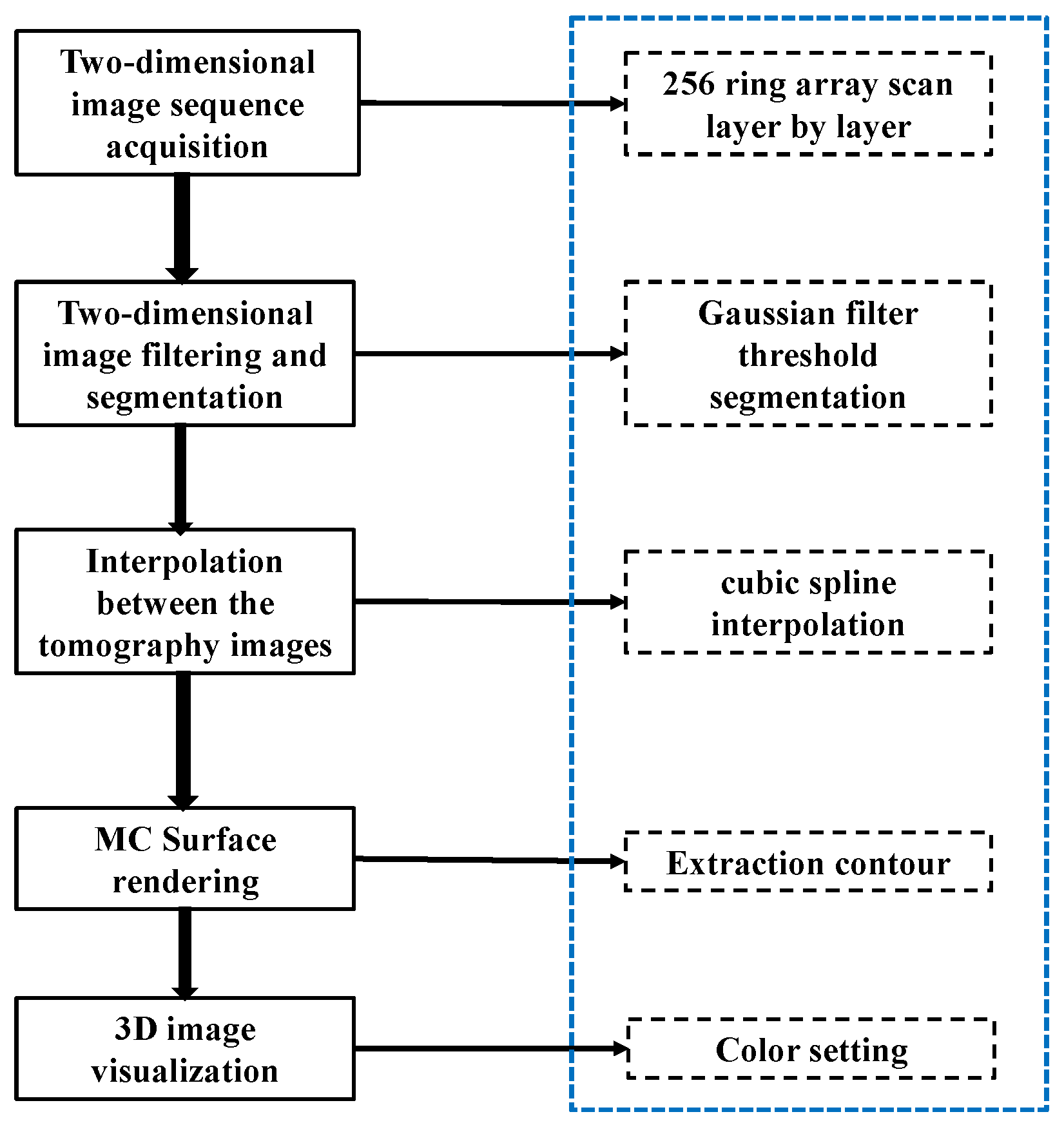
2. Reconstruction Method for Three-Dimensional Ultrasound Images Based on the Sequences of Ultrasound Tomography
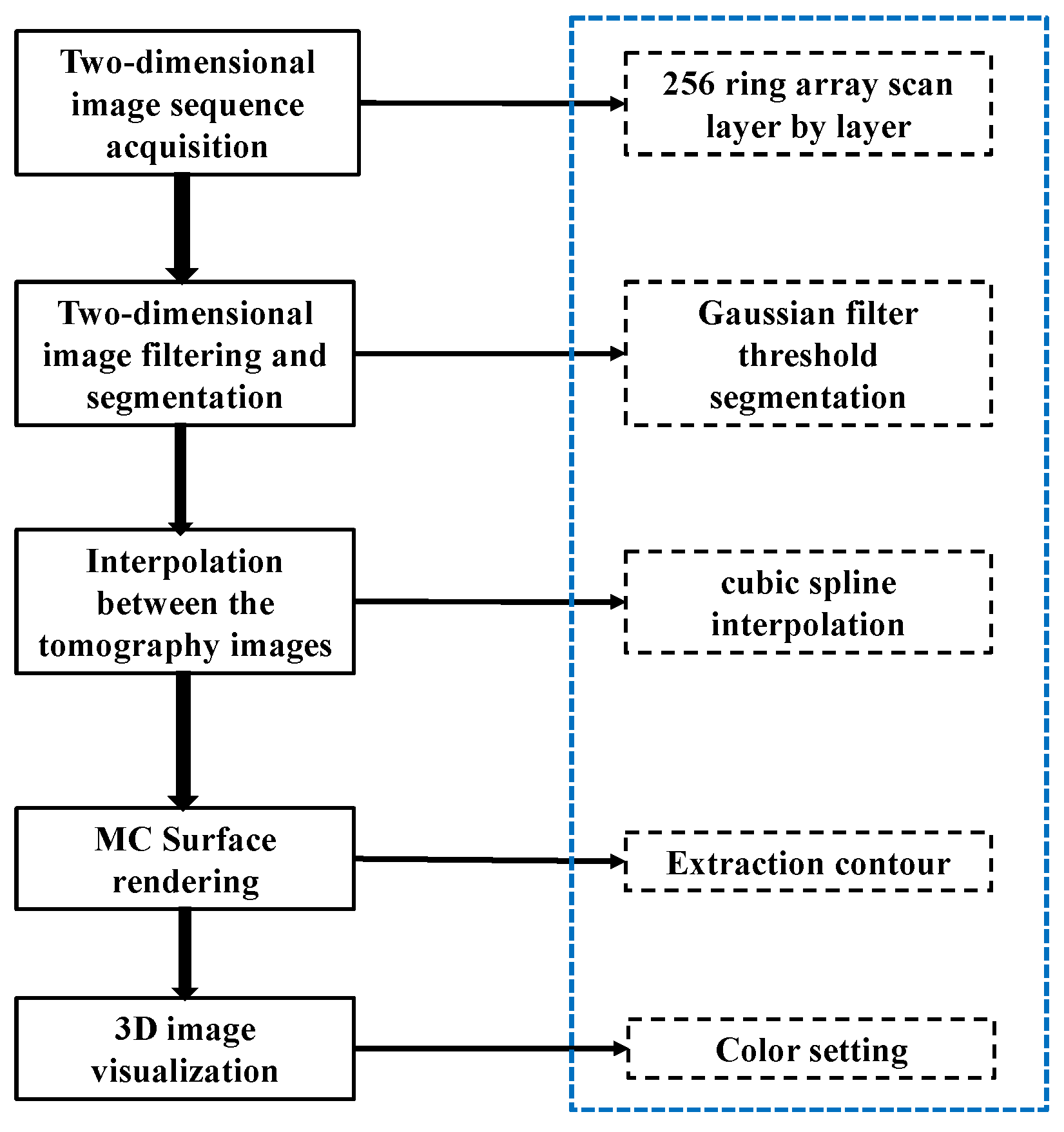
2.1. The Principles and Methods of the 3D Ultrasonic Image Reconstruction Algorithm Based on Surface Rendering
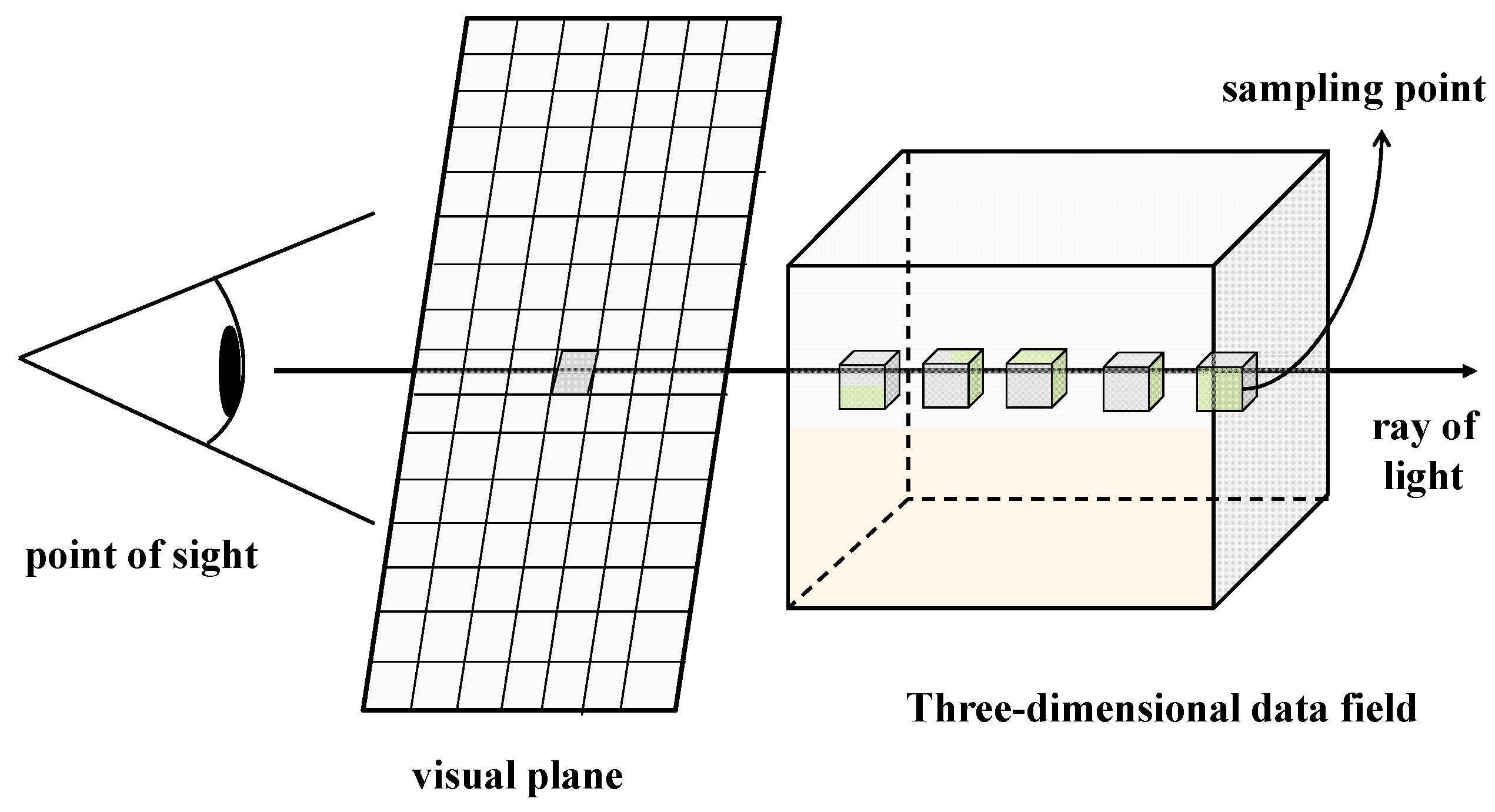
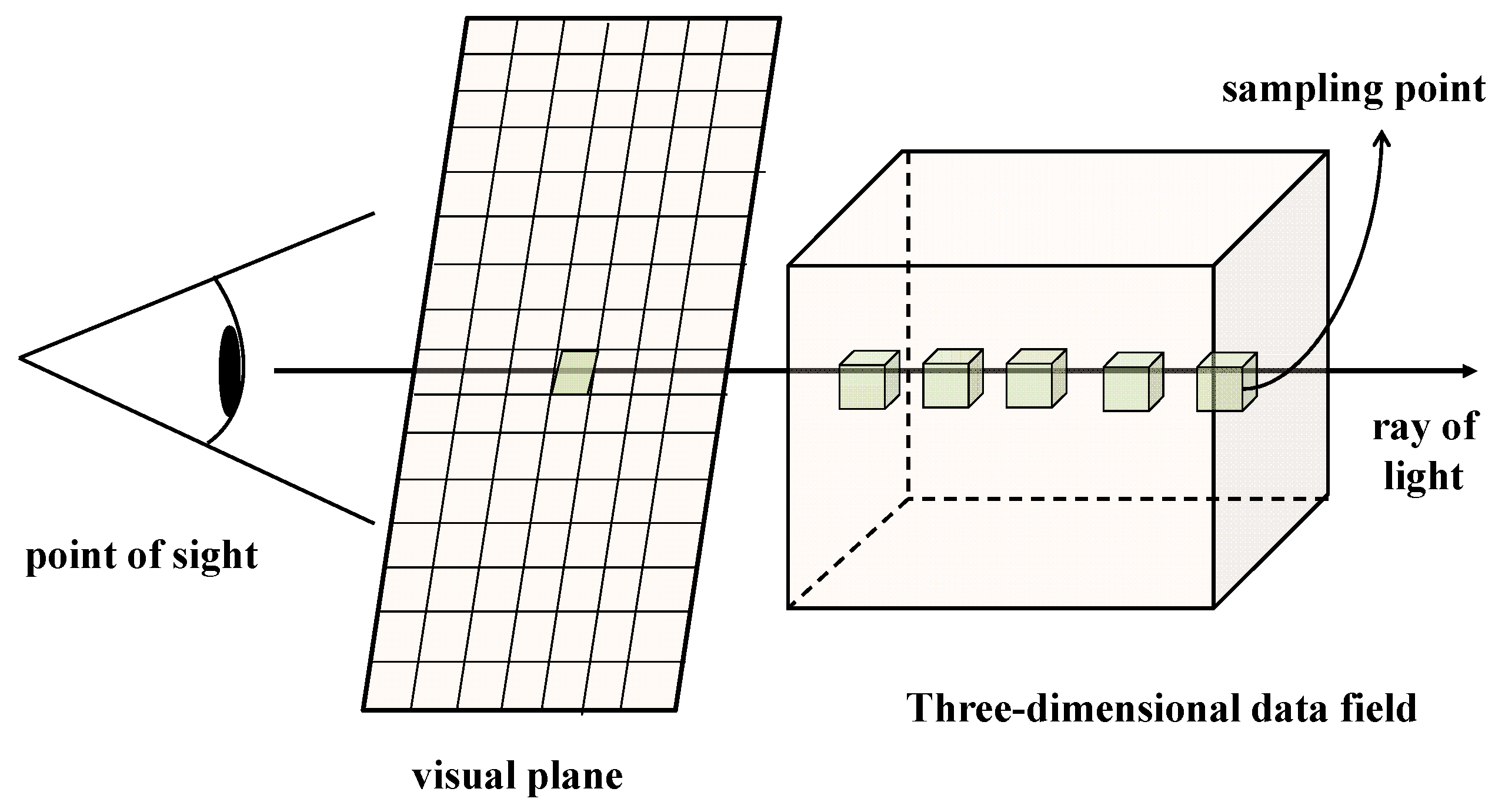
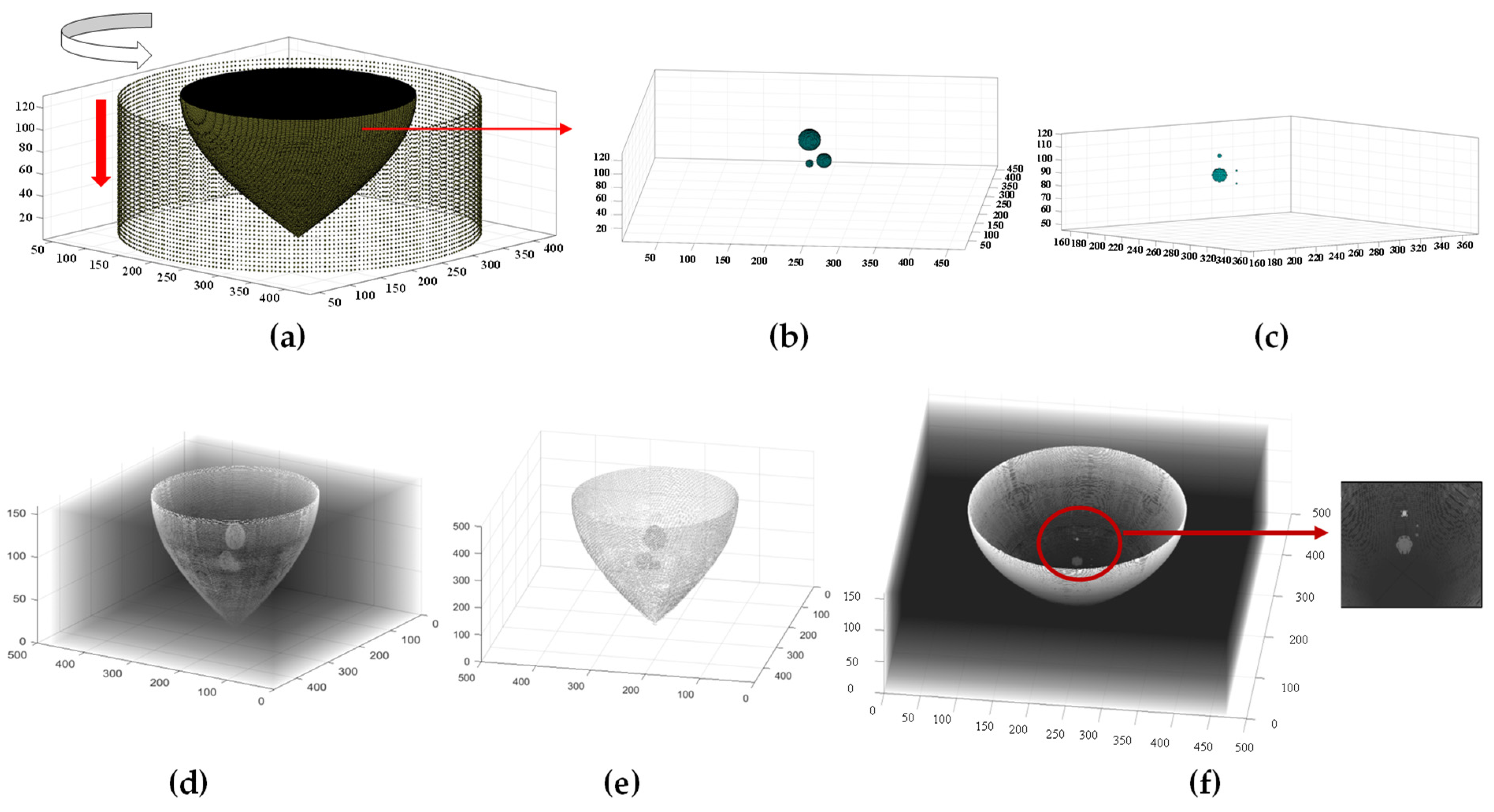
2.2. The Principles and Methods of 3D Ultrasonic Image Reconstruction Algorithms Based on Volume Rendering
3. The Reconstruction of a Breast Phantom 3D Ultrasound Simulation Image Utilizing the 1 × 256 Ring Array
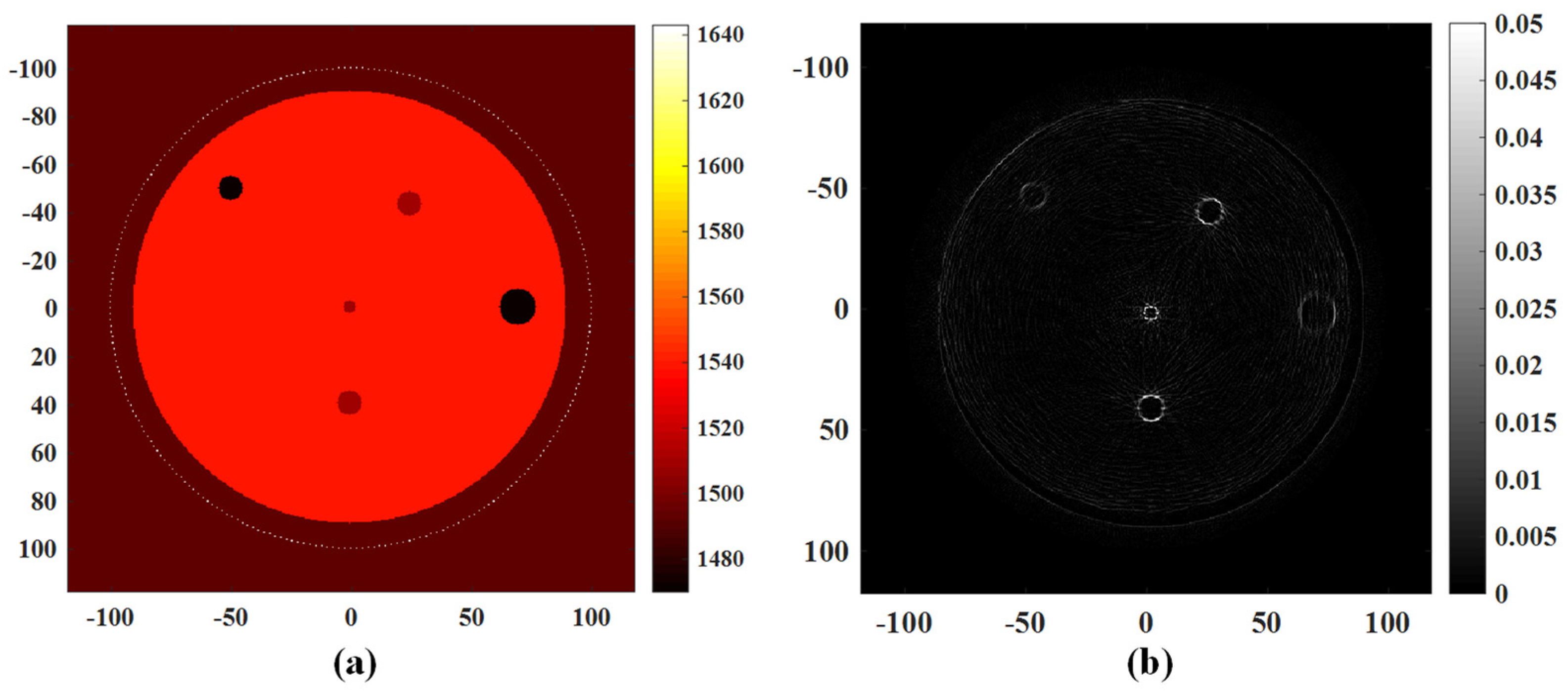
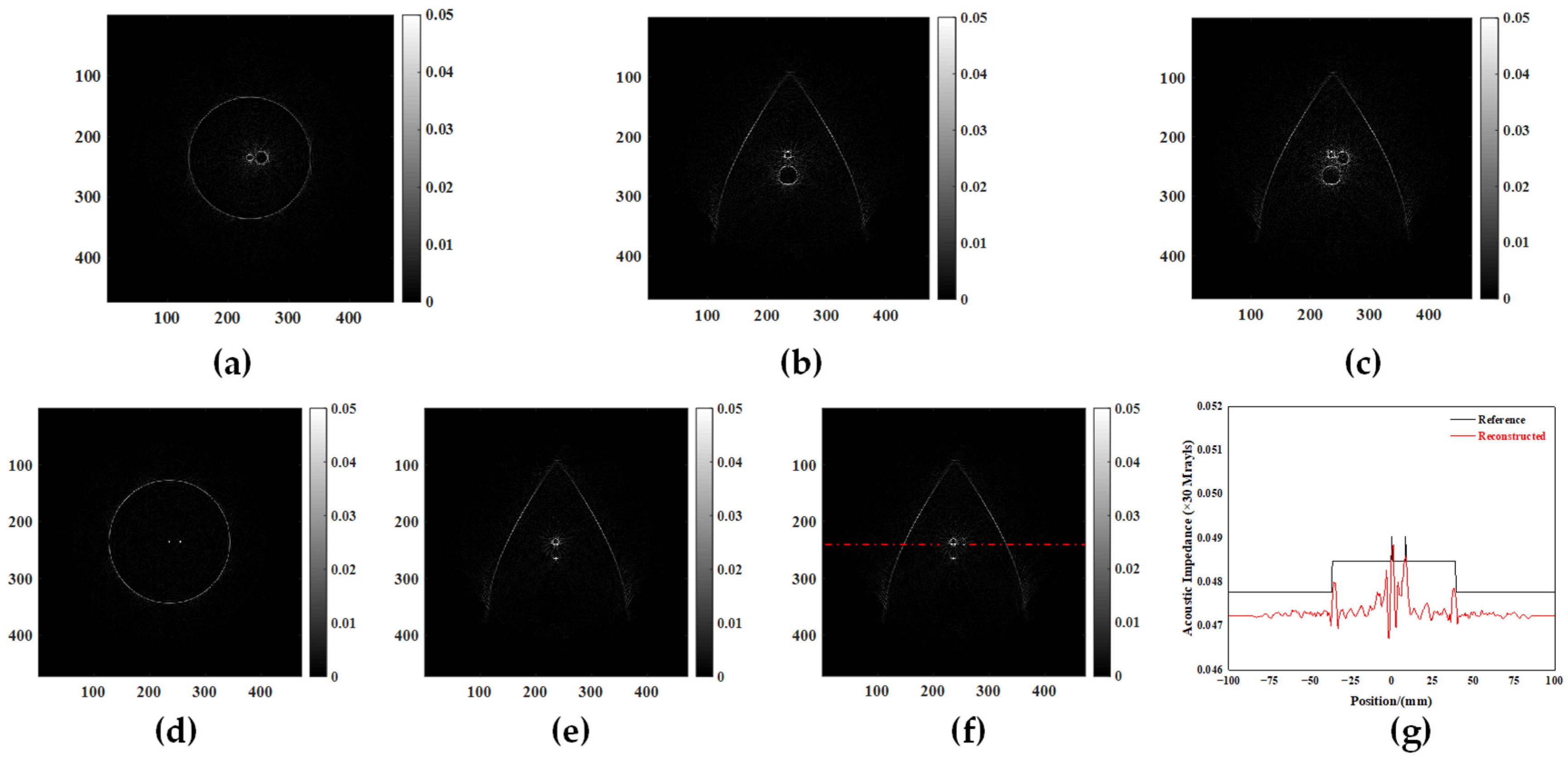
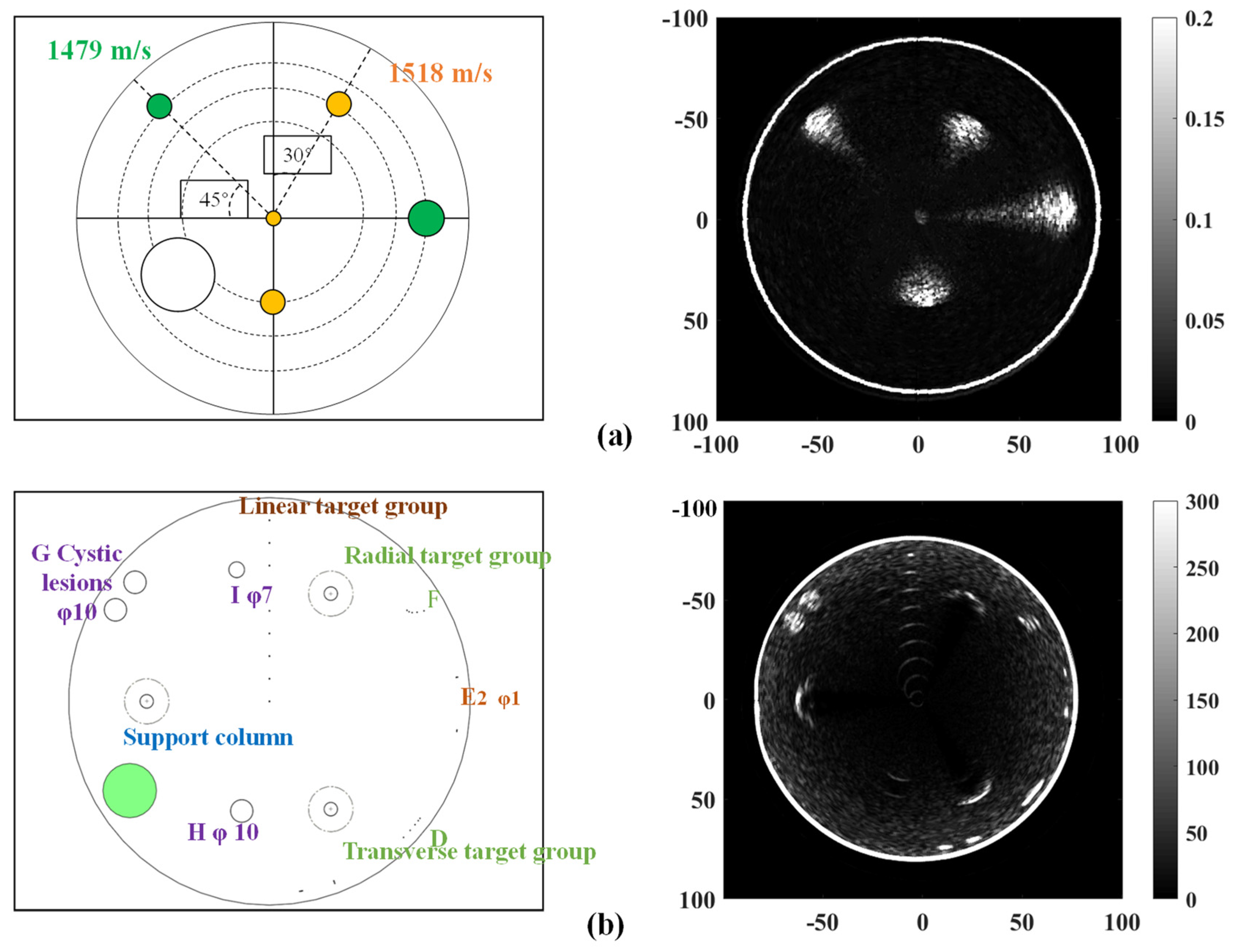
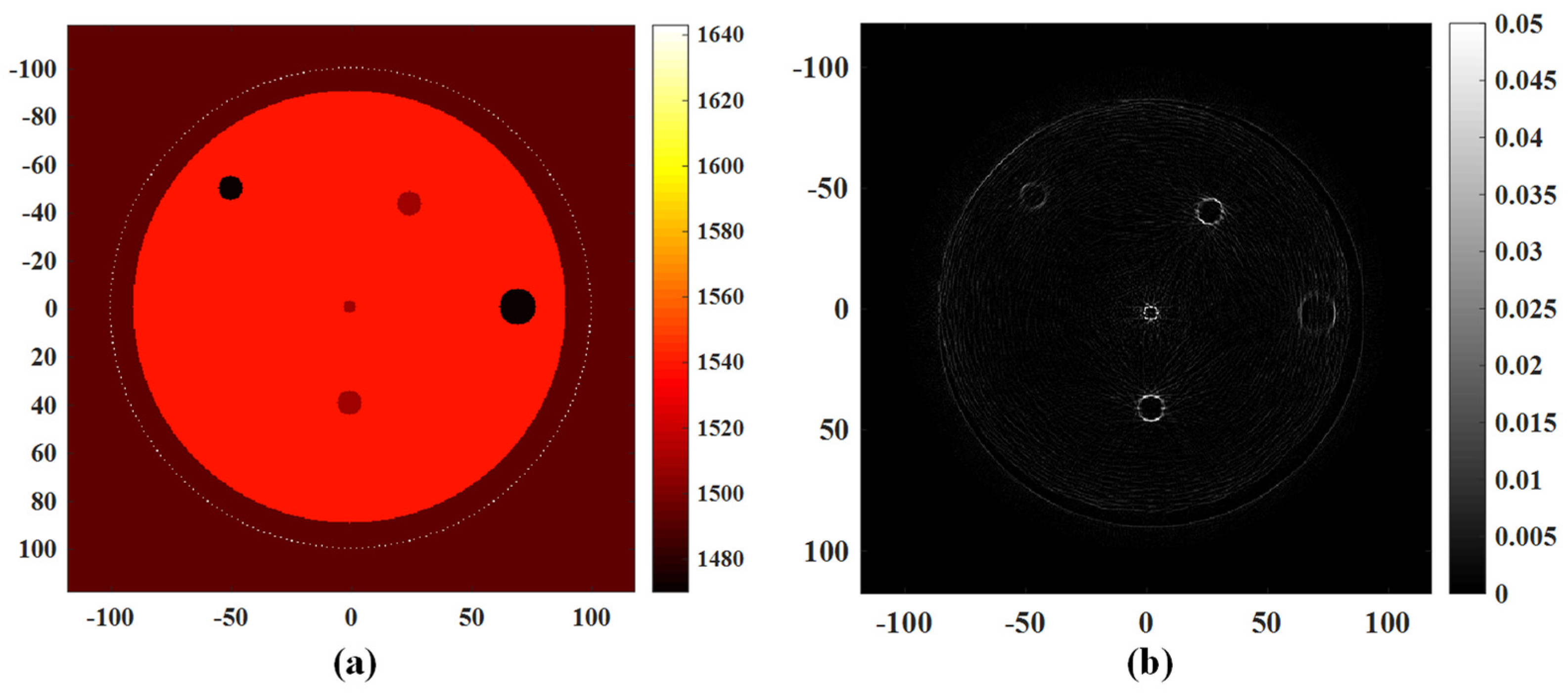
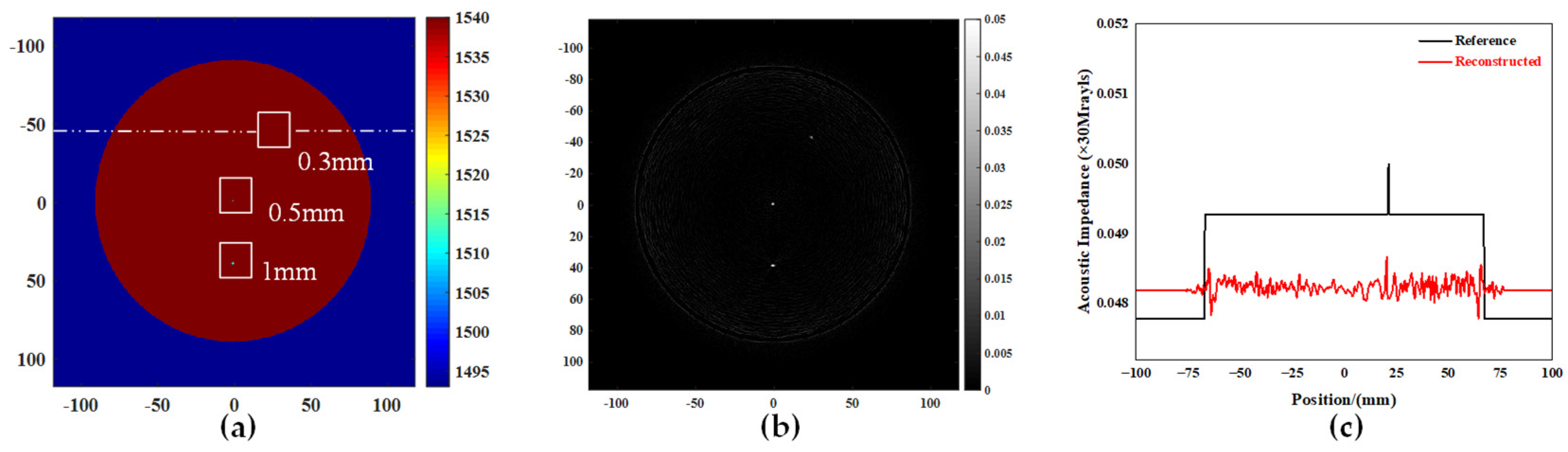
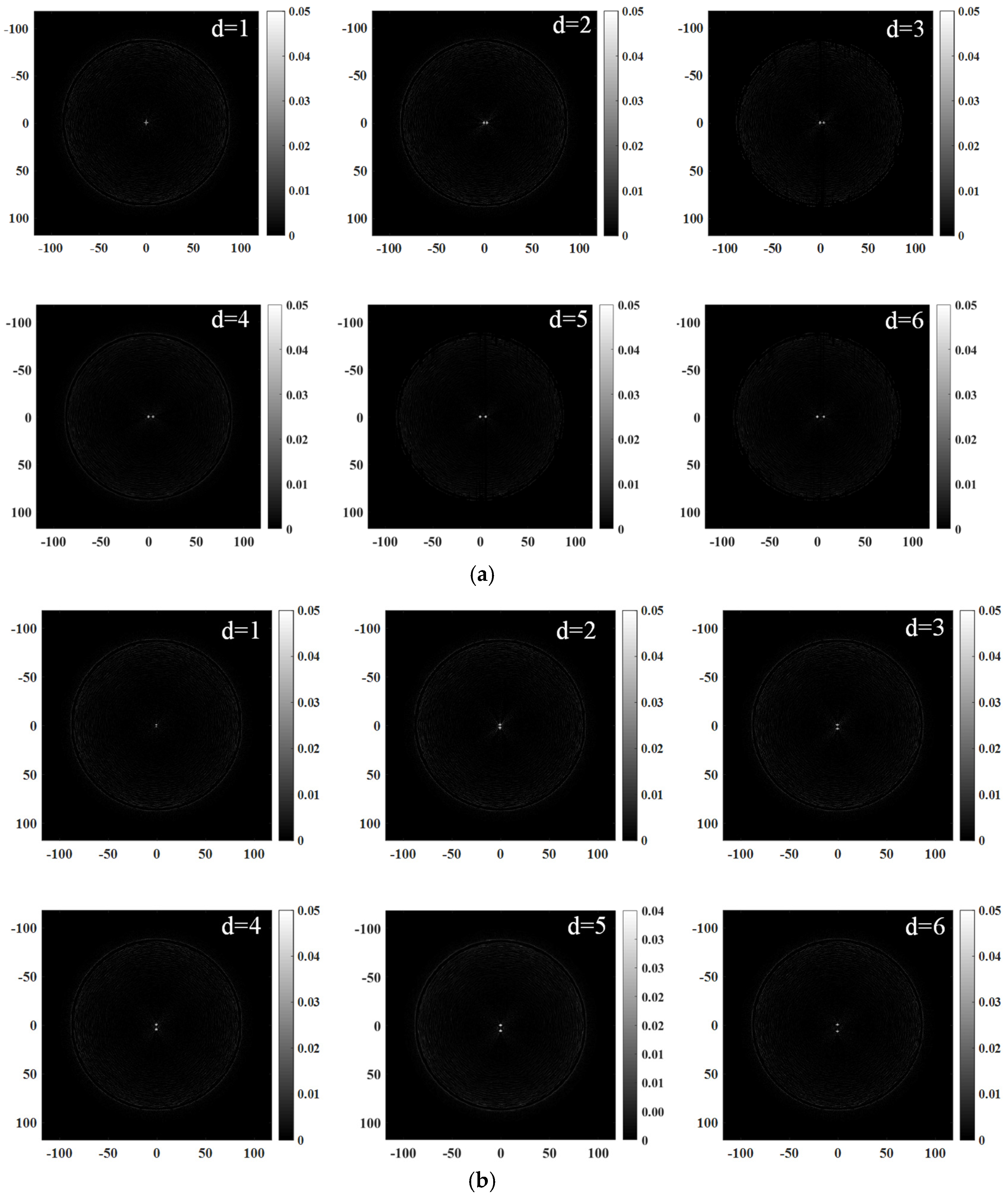
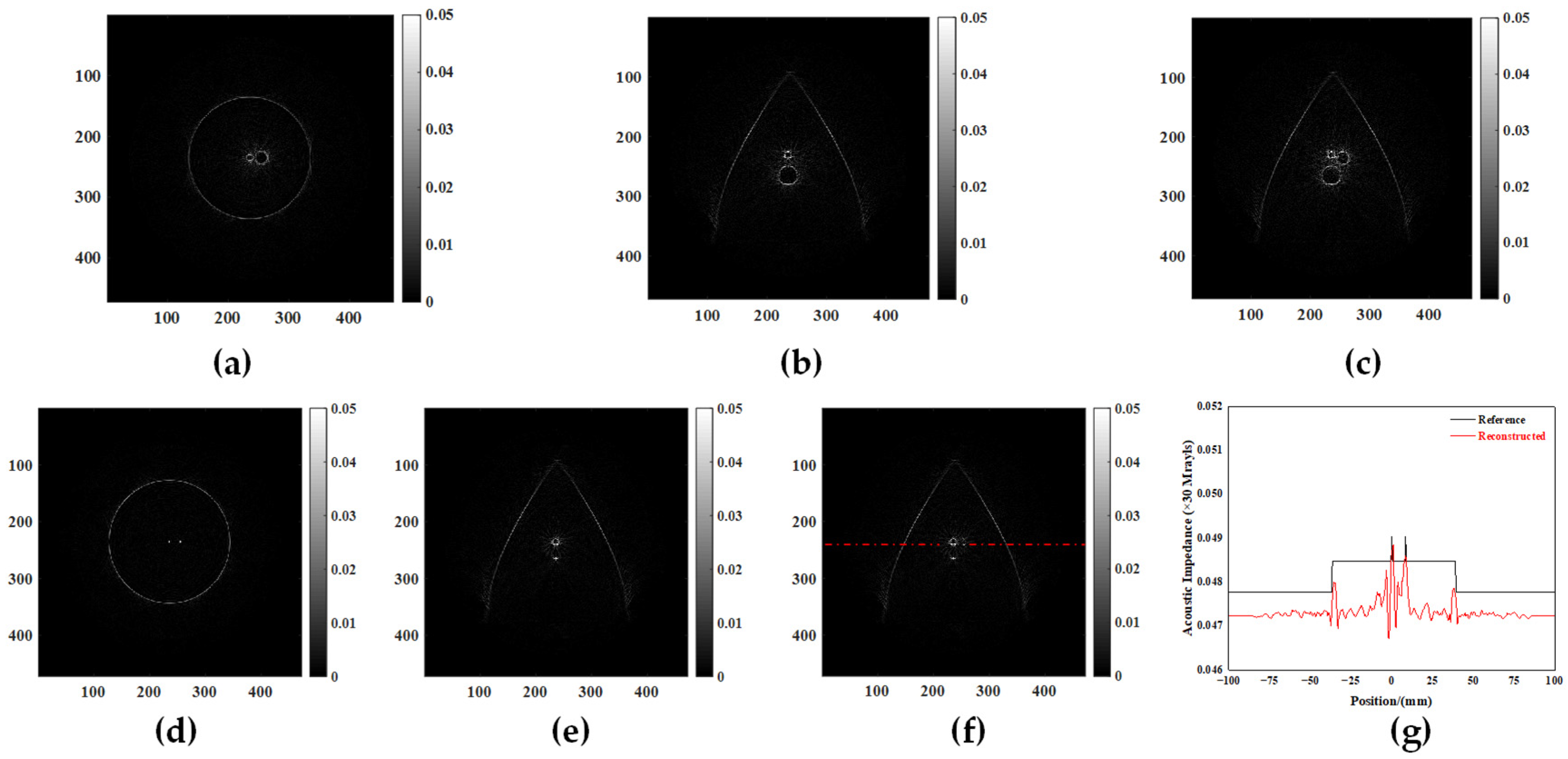
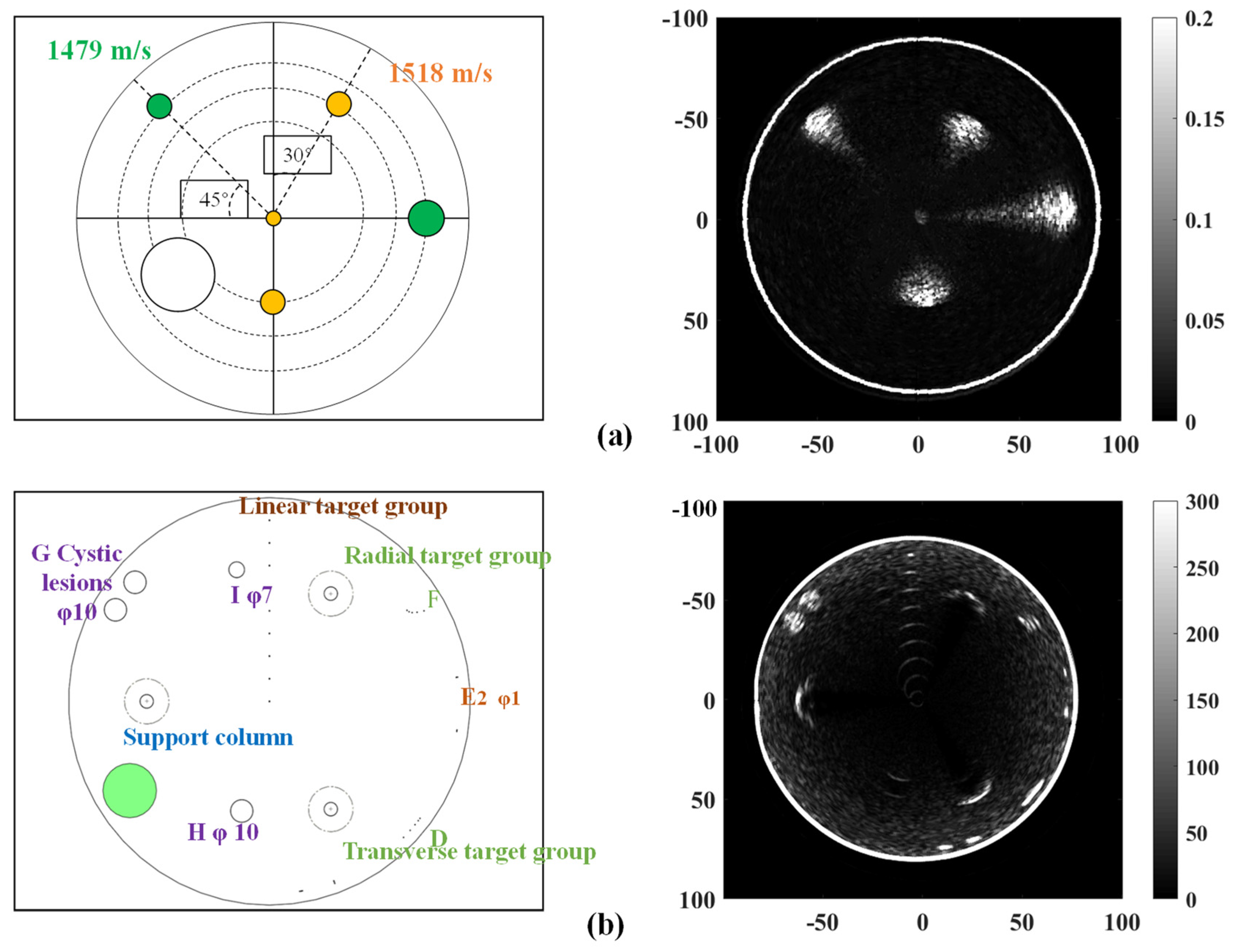
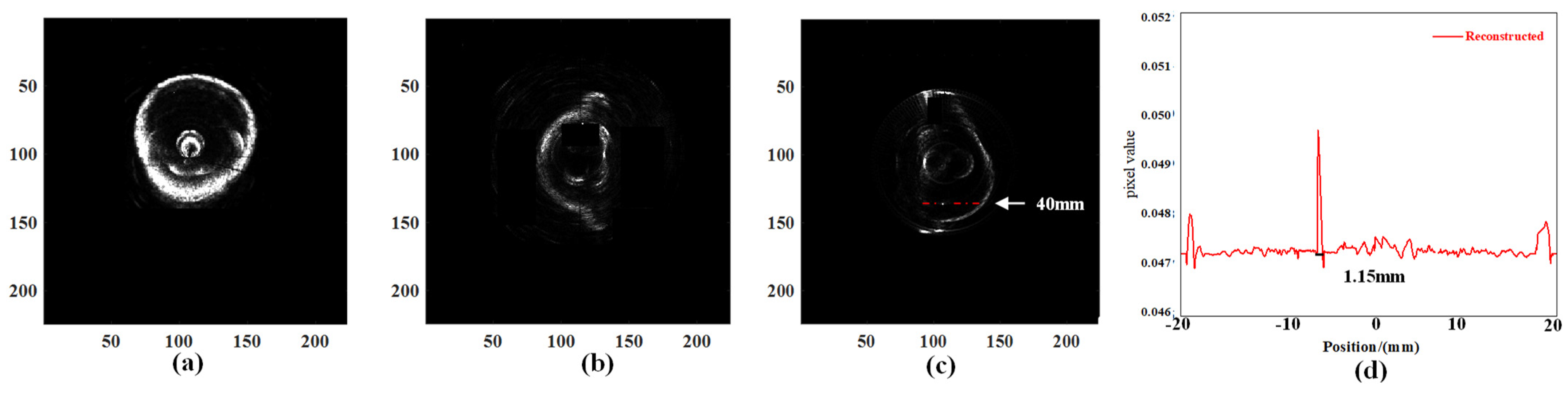
3.1. The Reconstruction and Resolution Evaluation of Ultrasonic Reflection Simulation Images
3.2. The Volume Rendering 3D Reconstruction of the Simulation Model
3.3. The Volume Rendering 3D Reconstruction of the Simulation Model
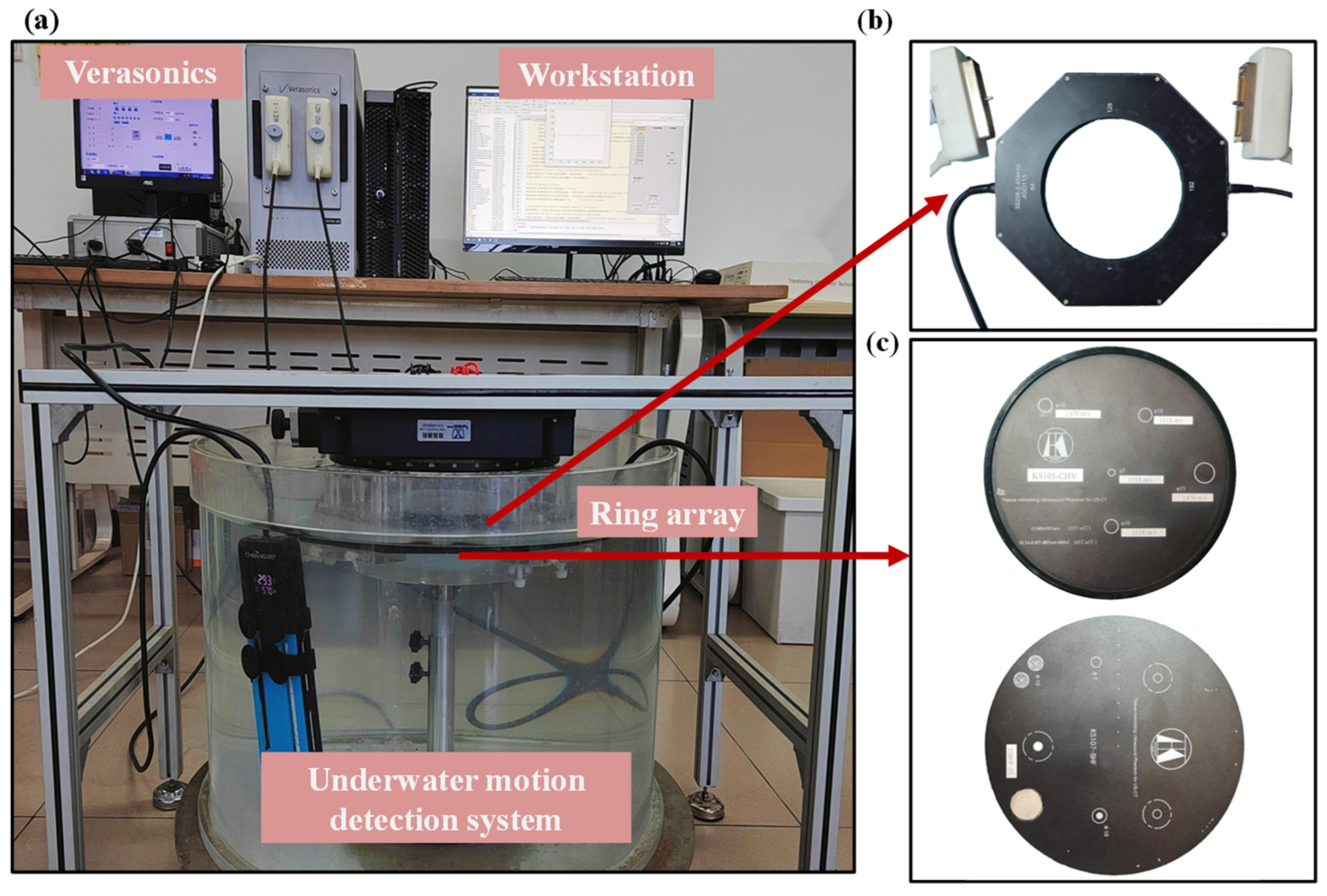
4. The Reconstruction Experiment of Breast Three-Dimensional Ultrasound Based on the 1 × 256 Ring Array
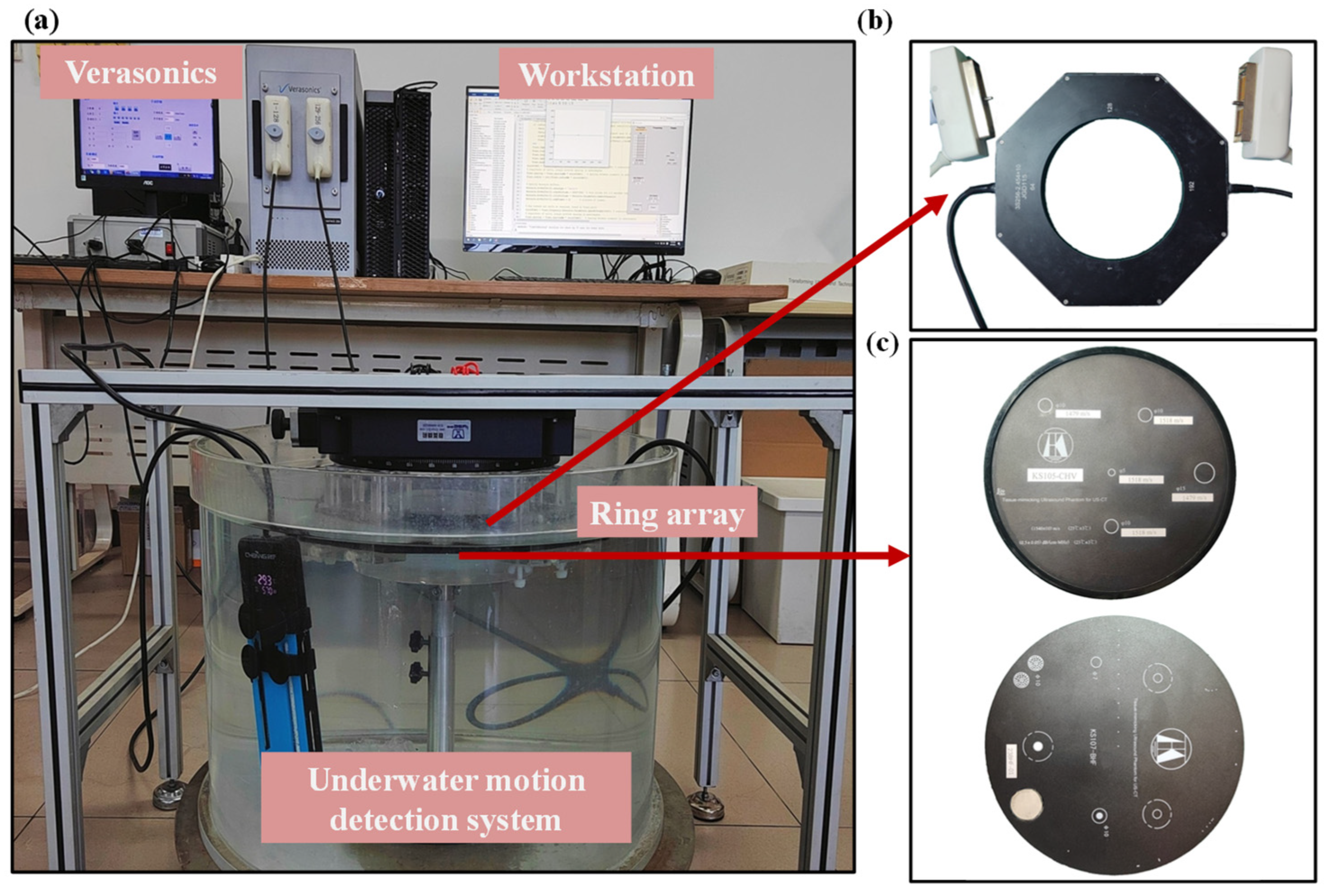
4.1. The Test Imaging of a Tissue-Mimicking Ultrasound Phantom for US-CT
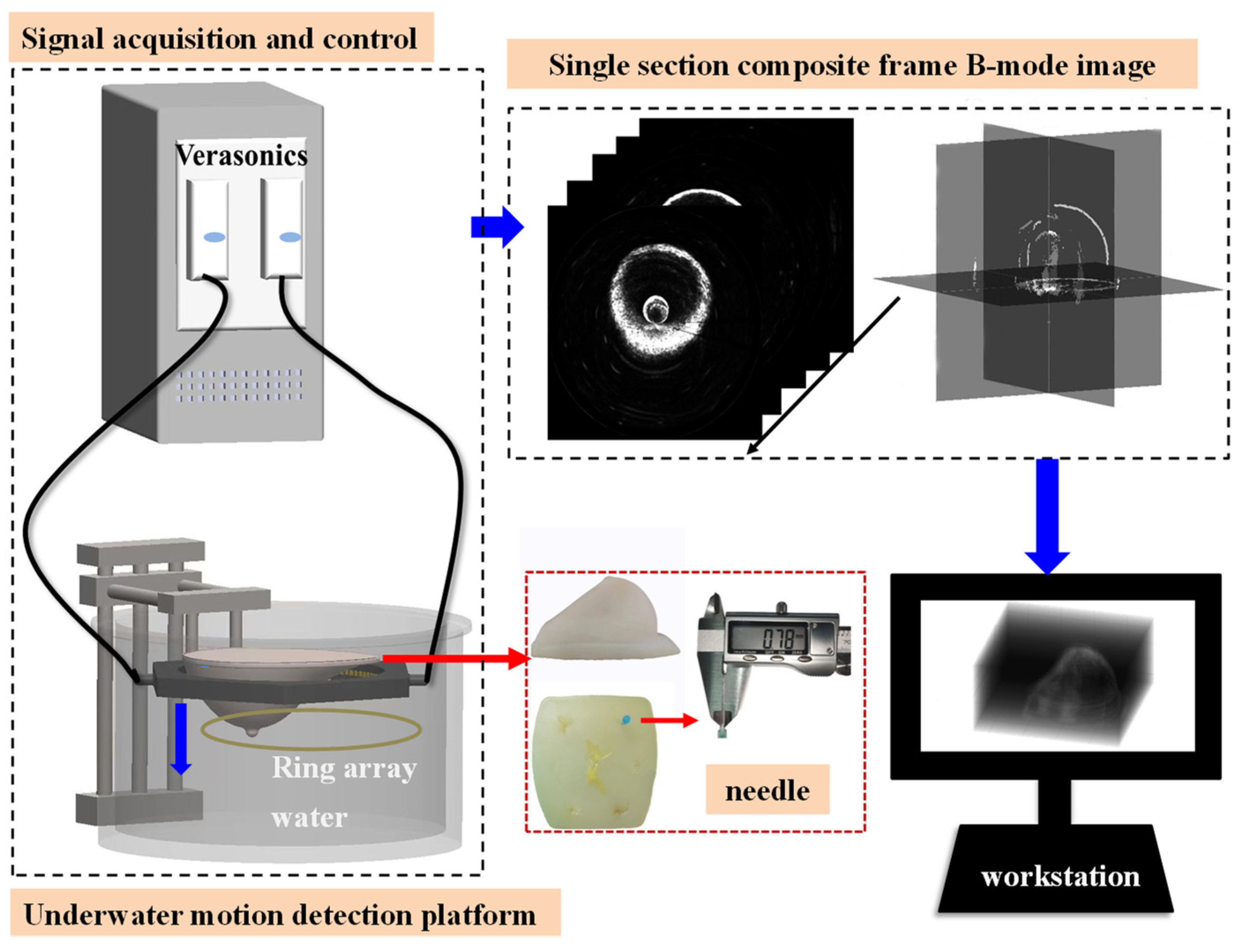
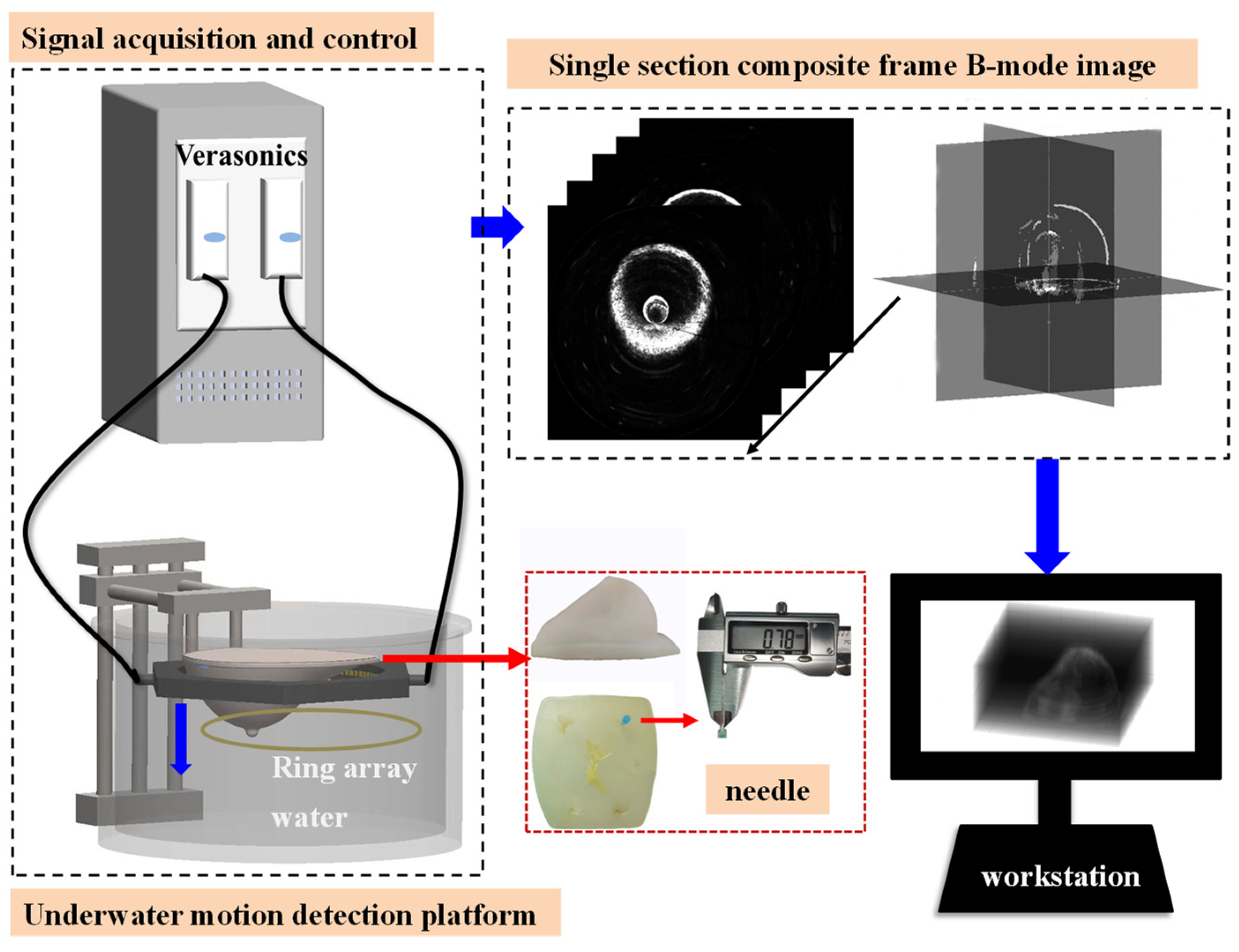
4.2. Three-Dimensional Ultrasonic Reconstruction System
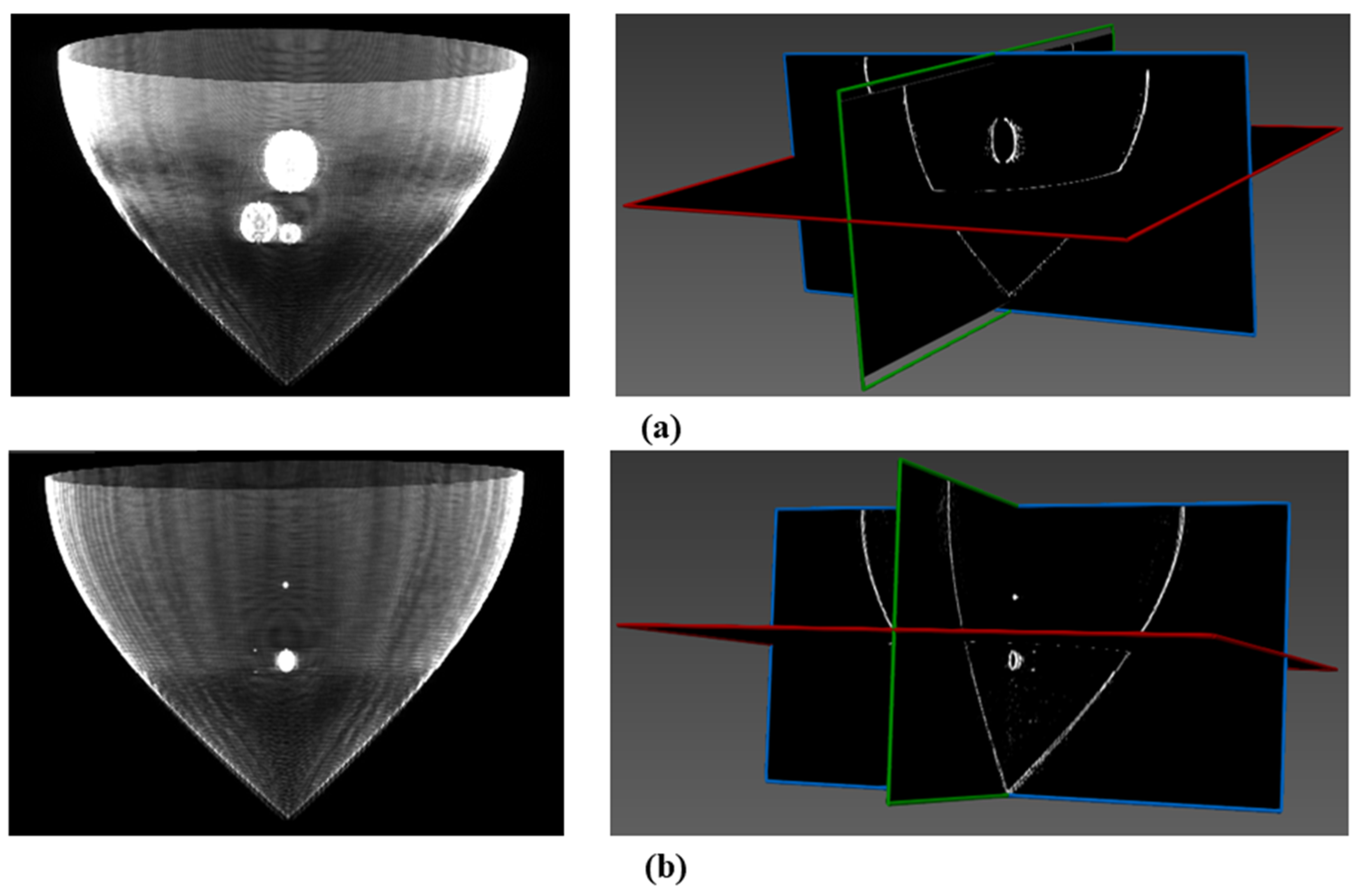
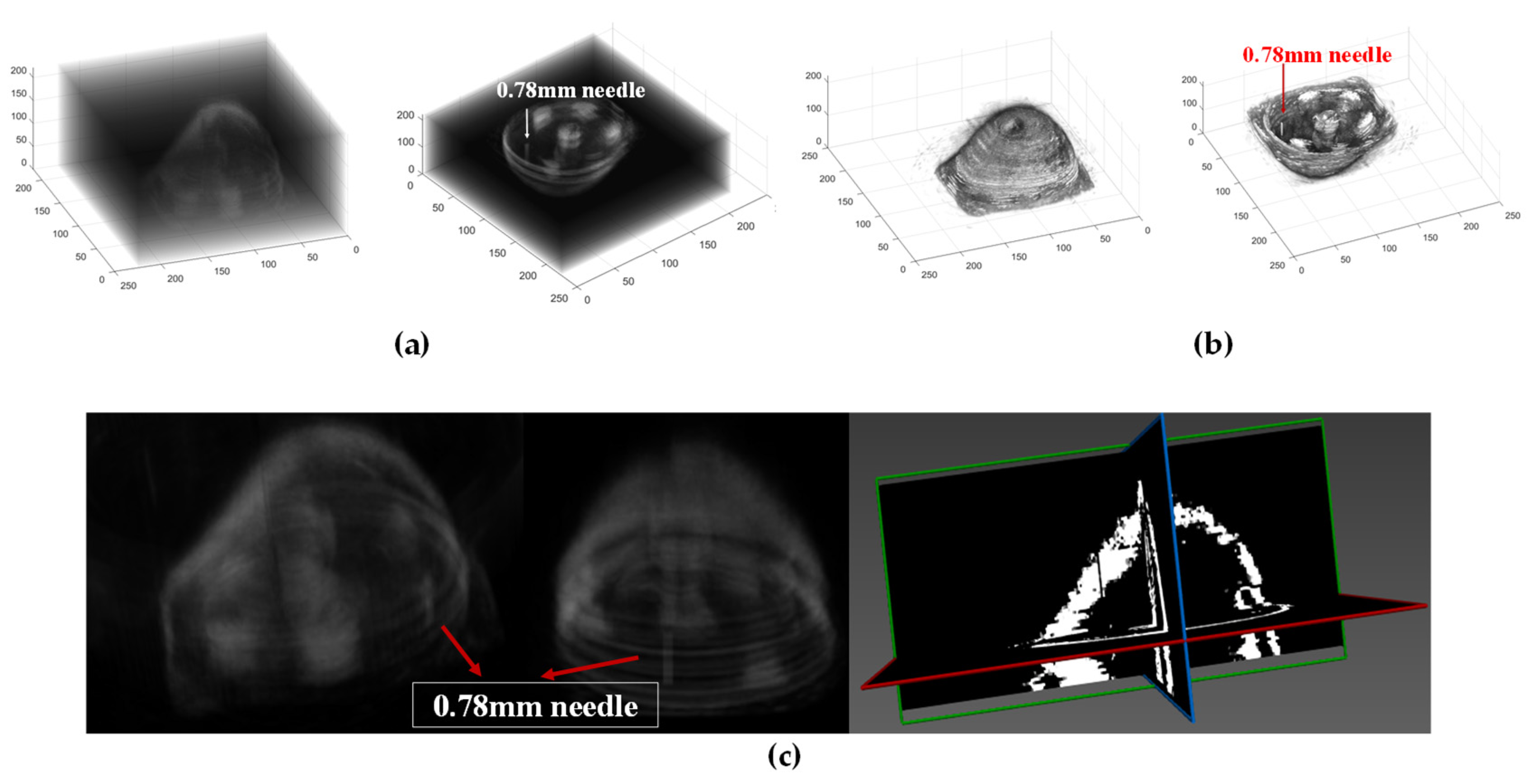
4.3. Three-Dimensional Ultrasound Imaging of a Breast Model
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Opieliński, K.J.; Pruchnicki, P.; Gudra, P.; Podgórski, P.; Kurcz, J.; Kraśnicki, T.; Sąsiadek, M.; Majewski, J. Imaging results of multi-modal ultrasound computerized tomography system designed for breast diagnosis. Comput. Med. Imaging Graph. 2015, 46, 83–94. [Google Scholar] [CrossRef] [PubMed]
- Peng, C.; Cai, Q.; Chen, M.; Jiang, X. Recent Advances in Tracking Devices for Biomedical Ultrasound Imaging Applications. Micromachines 2022, 13, 1855. [Google Scholar] [CrossRef] [PubMed]
- Mu, X.; Neo, D.; Yu, H.; Kumar, A.S.; Chau, F.S. Polygonal pyramidal reflector-based micromachined microscanners for bioimaging. J. Micro/Nanolithogr. MEMS MOEMS 2013, 13, 011109. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhao, Y.; Zhang, N.; Xiao, Y.; Jin, J.; Feng, N.; Shen, Y. Full-Waveform Inversion for Breast Ultrasound Tomography Using Line-Shape Modeled Elements. Ultrasound Med. Biol. 2023, 49, 1070–1081. [Google Scholar] [CrossRef]
- Qu, M.; Ding, H.; Li, D.; Zhu, K.; Lv, D.; Xu, H.; Guo, X.; Xie, J. Imaging of simulated muscle based on single chip of AlN piezoelectric micromachined ultrasonic transducer. J. Micromech. Microeng. 2022, 32, 075003. [Google Scholar] [CrossRef]
- Tang, H.; Lu, Y.; Fung, S.; Tsai, J.M.; Daneman, M.; Horsley, D.A.; Boser, B.E. Pulse-echo ultrasonic fingerprint sensor on a chip. In Proceedings of the 2015 Transducers—2015 18th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Anchorage, AK, USA, 21–25 June 2015; pp. 674–677. [Google Scholar]
- Wang, L. Microwave Imaging and Sensing Techniques for Breast Cancer Detection. Micromachines 2023, 14, 1462. [Google Scholar] [CrossRef]
- Li, J.; Wang, B.; Zhang, D.; Li, C.; Zhu, Y.; Zou, Y.; Chen, B.; Wu, T.; Wang, X. A Preclinical System Prototype for Focused Microwave Breast Hyperthermia Guided by Compressive Thermoacoustic Tomography. IEEE Trans. Biomed. Eng. 2021, 68, 2289–2300. [Google Scholar] [CrossRef]
- Cox, M.T.; Abbass, M.A.; Mast, T.D. Numerical analysis of three-dimensional echo decorrelation imaging. J. Acoust. Soc. Am. 2020, 147, EL478–EL483. [Google Scholar] [CrossRef]
- Nikolaev, A.V.; Jong, L.; Weijers, G.; Groenhuis, V.; Mann, R.M.; Siepel, F.J.; Maris, B.M.; Stramigioli, S.; Korte, C.L. Quantitative Evaluation of an Automated Cone-Based Breast Ultrasound Scanner for MRI-3D US Image Fusion. IEEE Trans. Med. Imaging 2021, 40, EL478–EL483. [Google Scholar] [CrossRef]
- Detmer, P.R.; Bashein, G.; Hodges, T.; Beach, K.W.; Filer, E.P.; Burns, D.H.; Strandness, D.E. 3D ultrasonic image feature localization based on magnetic scan head tracking: In Vitro calibration and validation. Ultrasound Med. Biol. 1994, 20, 923–936. [Google Scholar] [CrossRef] [PubMed]
- Yoon, C.; Kang, J.; Song, T.-k.; Chang, J.H. Elevational synthetic aperture focusing for three-dimensional photoacoustic imaging using a clinical one-dimensional array transducer. IEEE Trans. Biomed. Eng. 2022, 69, 2817–2825. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Villa, U.; Duric, N.; Anastasio, M.A. 3D full-waveform inversion in ultrasound computed tomography employing a ring-array. In Proceedings of the Medical Imaging 2023: Ultrasonic Imaging and Tomography, San Diego, CA, USA, 19–24 February 2023; pp. 99–104. [Google Scholar]
- Yen, J.T.; Powis, E. Boundary Array Transducer and Beamforming for Low-Cost Real-time 3D Imaging. In Proceedings of the 2020 IEEE International Ultrasonics Symposium (IUS), Las Vegas, NV, USA, 7–11 September 2020. [Google Scholar]
- Chen, J.; Liu, W.; Gu, D.; Wu, D. Laser Scanning Guided Localization Imaging with a Laser-Machined Two-Dimensional Flexible Ultrasonic Array. Array. Micromachines 2022, 13, 754. [Google Scholar] [CrossRef] [PubMed]
- Lavarello, R.J.; Oelze, M.L.; Berggren, M.; Johnson, S.; Orescanin, M.; Yapp, R. Implementation of scatterer size imaging on an ultrasonic breast tomography scanner. In Proceedings of the 2009 IEEE International Ultrasonics Symposium, Rome, Italy, 20–23 September 2009; pp. 305–308. [Google Scholar]
- Wiskin, J.; Borup, D.; Andre, M.; Johnson, S.; Klock, J. Three-dimensional nonlinear inverse scattering: Quantitative transmission algorithms, refraction corrected reflection, scanner design and clinical results. Acoust. Soc. Am. J. 2013, 133, 3229. [Google Scholar] [CrossRef]
- Duric, N.; Littrup, P.; Poulo, L.; Babkin, A.; Pevzner, R.; Holsapple, E.; Rama, O.; Glide, C. Detection of breast cancer with ultrasound tomography: First results with the Computed Ultrasound Risk Evaluation (CURE) prototype. Med. Phys. 2007, 34, 773–785. [Google Scholar] [CrossRef] [PubMed]
- Duric, N.; Littrup, P.; Schmidt, S.; Li, C.; Roy, O.; Beyknight, L.; Janer, R.; Kunz, D.; Chen, X.; Goll, J.; et al. Breast imaging with the SoftVue imaging system: First results. In Proceedings of the Spie Medical Imaging, Lake Buena Vista, FL, USA, 29 March 2013; pp. 86750K-1–86750K-8. [Google Scholar]
- Song, J.J.; Zhang, Q.D.; Zhou, L.; Quan, Z.H.; Wang, S.S.; Liu, Z.H.; Fang, X.Y.; Wu, Y.; Yang, Q.; Yin, H.; et al. Design and Implementation of a Modular and Scalable Research Platform for Ultrasound Computed Tomography. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 69, 62–72. [Google Scholar] [CrossRef]
- Jifik, R.; Peterlik, I.; Ruiter, N.; Fousek, J.; Dapp, R.; Zapf, M.; Jan, J. Sound-speed image reconstruction in sparse-aperture 3-D ultrasound transmission tomography. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 254–264. [Google Scholar]
- Liu, R.; Ruiter, N.V.; Schwarzenberg, G.F.; Zapf, M.; Stotzka, R.; Gemmeke, H. 2J-2 3D Ultrasound Computer Tomography: Results with a Clinical Breast Phantom. In Proceedings of the 2006 IEEE Ultrasonics Symposium, Vancouver, BC, Canada, 2–6 October 2006; pp. 989–992. [Google Scholar]
- Lin, R.; Zhang, J.; Gao, W.; Wang, X.; Lv, S.; Lam, K.-H.; Gong, X. A Miniature Multi-Functional Photoacoustic Probe. Micromachines 2023, 14, 1269. [Google Scholar] [CrossRef]
- Birk, M.; Hagner, C.; Balzer, M.; Ruiter, N.V.; Hiibner, M.; Becker, J. Evaluation of the Reconfiguration of the Data Acquisition System for 3D USCT. Int. J. Reconfig. Comput. 2011, 2011, 115–123. [Google Scholar] [CrossRef]
- Kwon, Y.S.; Kim, H.Y.; Kang, D.-H.; Kim, D.H.; Jeong, J.-W.; Lee, B.C. Real-time 3D plane-wave imaging using annular capacitive micromachined ultrasonic transducer array. Sens. Actuators A Phys. 2023, 359, 114475. [Google Scholar] [CrossRef]
- Omidvar, A.; Rohling, R.; Cretu, E.; Cresswell, M.; Hodgson, A.J. Shape estimation of flexible ultrasound arrays using spatial coherence: A preliminary study. Ultrasonics 2024, 136, 107171. [Google Scholar] [CrossRef]
- Zhou, W.; Zhang, T.; Ou-Yang, J.; Yang, X.; Wu, D.; Zhu, B. PIN-PMN-PT Single Crystal 1-3 Composite-based 20 MHz Ultrasound Phased Array. Micromachines 2020, 11, 524. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Zhang, W.; Shao, X.; Yang, Y.; Zhang, T.; Lei, M.; Wang, Z.; Gao, B.; Hu, S. Research on the Multi-Element Synthetic Aperture Focusing Technique in Breast Ultrasound Imaging, Based on the Ring Array. Micromachines 2022, 13, 1753. [Google Scholar] [CrossRef] [PubMed]
- Wiskin, J.W.; Borup, D.T.; Iuanow, E.; Klock, J.; Lenox, M.W. 3-D nonlinear acoustic inverse scattering: Algorithm and quantitative results. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2017, 64, 1161–1174. [Google Scholar] [CrossRef] [PubMed]
- Rahiman, M.; Rahim, R.; Rahim, H.; Green, R.; Zakaria, Z.; Mohamad, E.; Muji, S. An evaluation of single plane ultrasonic tomography sensor to reconstruct three-dimensional profiles in chemical bubble column. Sens. Actuators A Phys. 2016, 246, 18–27. [Google Scholar] [CrossRef]
- Qiao, S.; Yu, Q.; Zhang, T.; Zhao, C.; Zhao, Z.; Song, L.; Tao, H. Edge extraction method for medical images based on improved local binary pattern combined with edge-aware filtering. Biomed. Signal Process. Control 2022, 74, 103490. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L. Research on 3D Reconstruction Algorithm of Medical CT Image Based on Parallel Contour. IEEE Sens. J. 2020, 20, 11828–11835. [Google Scholar] [CrossRef]
- Gagan, J.H.; Shirsat, H.S.; Mathias, G.P.; Mallya, B.V.; Andrade, J.; Rajagopal, K.V.; Kumar, J.H. Automated Segmentation of Common Carotid Artery in Ultrasound Images. IEEE Access 2022, 10, 58419–58430. [Google Scholar] [CrossRef]
- Cohen, R.; Fingerhut, N.; Varray, F.; Liebgott, H.; Eldar, Y.C. Sparse convolutional beamforming for 3-D ultrafast ultrasound imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 68, 2444–2459. [Google Scholar] [CrossRef]
- Li, F.; Villa, U.; Park, S.; Anastasio, M.A. 3-D Stochastic Numerical Breast Phantoms for Enabling Virtual Imaging Trials of Ultrasound Computed Tomography. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2022, 69, 135–146. [Google Scholar] [CrossRef]
- Huang, Q.; Wu, B.; Lan, J.; Li, X.J. Fully Automatic Three-Dimensional Ultrasound Imaging Based on Conventional B-Scan. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 426–436. [Google Scholar] [CrossRef]
- Hansen-Shearer, J.; Lerendegui, M.; Toulemonde, M.; Tang, M.-X.J. Ultrafast 3-D ultrasound imaging using row–column array-specific frame-multiply-and-sum beamforming. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2021, 69, 480–488. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Zhang, B.; Xue, C.; Zhang, W.; Zhang, G.; Cheng, Y. Multi-Perspective Ultrasound Imaging Technology of the Breast with Cylindrical Motion of Linear Arrays. Appl. Sci. 2019, 9, 419. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Diameter (mm) | Sound Speed (m/s) | Density (kg/m3) |
|---|---|---|---|
| Background material | 180 | 1515 | 1040 |
| Target 1 | 10 | 1479 | 950 |
| Target 2 | 10 | 1518 | 1060 |
| Target 3 | 5 | 1518 | 1060 |
| Target 4 | 15 | 1479 | 950 |
| Target 5 | 10 | 1518 | 1060 |
| Three-Dimensional Ultrasound Imaging System | Liu et al. [38] | This Work |
|---|---|---|
| Primary sensing component | Four 1 × 128 PMUT linear arrays | 1 × 256 piezoelectric ring array |
| Center frequency | 3.5 MHz | 3 MHz |
| Scanning mode | Rotate at an equal interval of 2° | Lift vertically at equal intervals of 1.5 mm |
| Spatial resolution | 10 mm | 0.78 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Wu, F.; Meng, F.; Zhang, G.; Wang, R.; Yang, Y.; Cui, J.; He, C.; Jia, L.; Zhang, W. A High-Resolution 3D Ultrasound Imaging System Oriented towards a Specific Application in Breast Cancer Detection Based on a 1 × 256 Ring Array. Micromachines 2024, 15, 209. https://doi.org/10.3390/mi15020209
Zhang J, Wu F, Meng F, Zhang G, Wang R, Yang Y, Cui J, He C, Jia L, Zhang W. A High-Resolution 3D Ultrasound Imaging System Oriented towards a Specific Application in Breast Cancer Detection Based on a 1 × 256 Ring Array. Micromachines. 2024; 15(2):209. https://doi.org/10.3390/mi15020209
Chicago/Turabian StyleZhang, Junhui, Fei Wu, Fansheng Meng, Guojun Zhang, Renxin Wang, Yuhua Yang, Jiangong Cui, Changde He, Licheng Jia, and Wendong Zhang. 2024. "A High-Resolution 3D Ultrasound Imaging System Oriented towards a Specific Application in Breast Cancer Detection Based on a 1 × 256 Ring Array" Micromachines 15, no. 2: 209. https://doi.org/10.3390/mi15020209
APA StyleZhang, J., Wu, F., Meng, F., Zhang, G., Wang, R., Yang, Y., Cui, J., He, C., Jia, L., & Zhang, W. (2024). A High-Resolution 3D Ultrasound Imaging System Oriented towards a Specific Application in Breast Cancer Detection Based on a 1 × 256 Ring Array. Micromachines, 15(2), 209. https://doi.org/10.3390/mi15020209