
Novel Technique to Increase the Effective Workspace of a Soft Robot

 ,
,  ,
,  and
and
Abstract
1. Introduction
2. Methodology
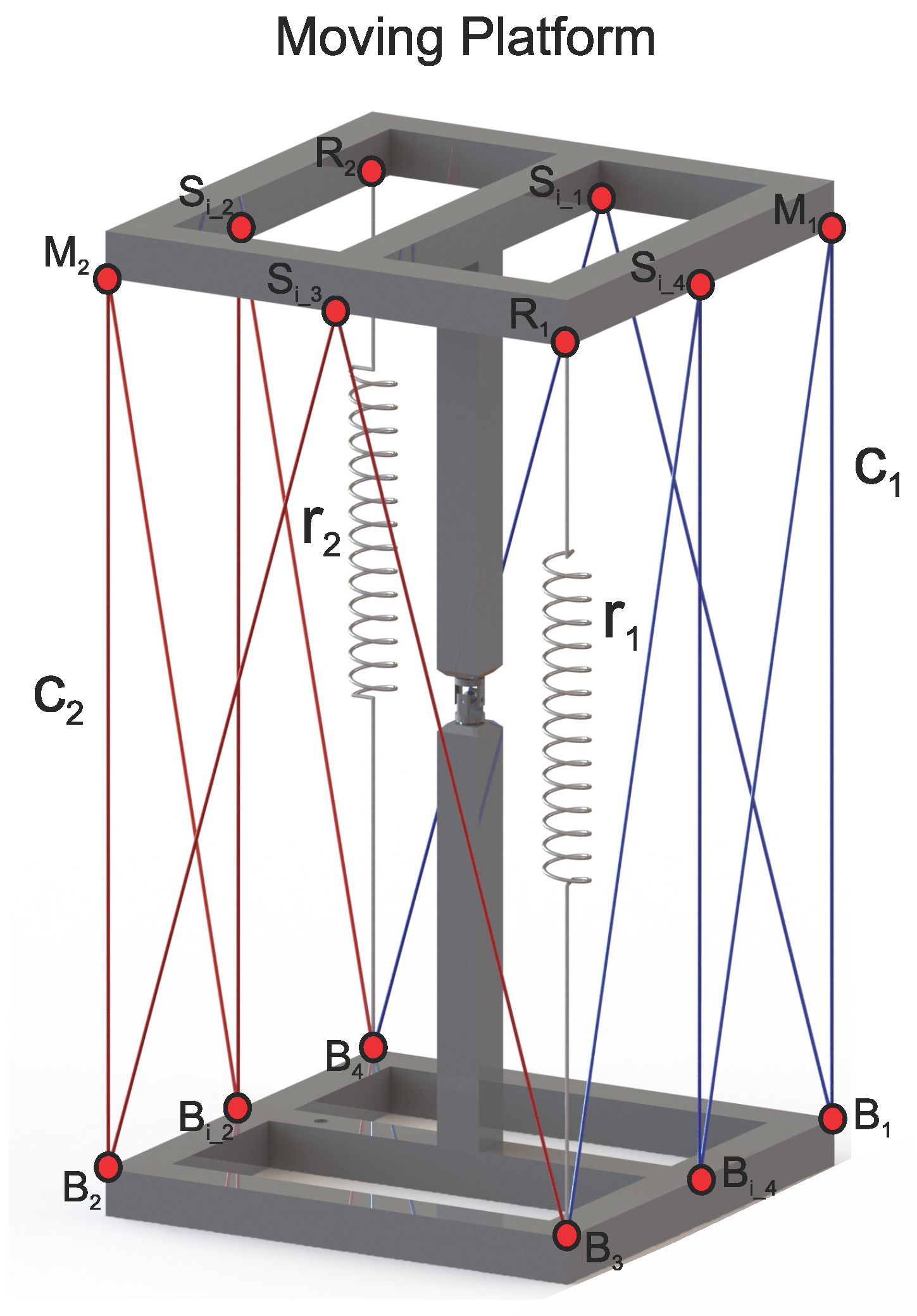
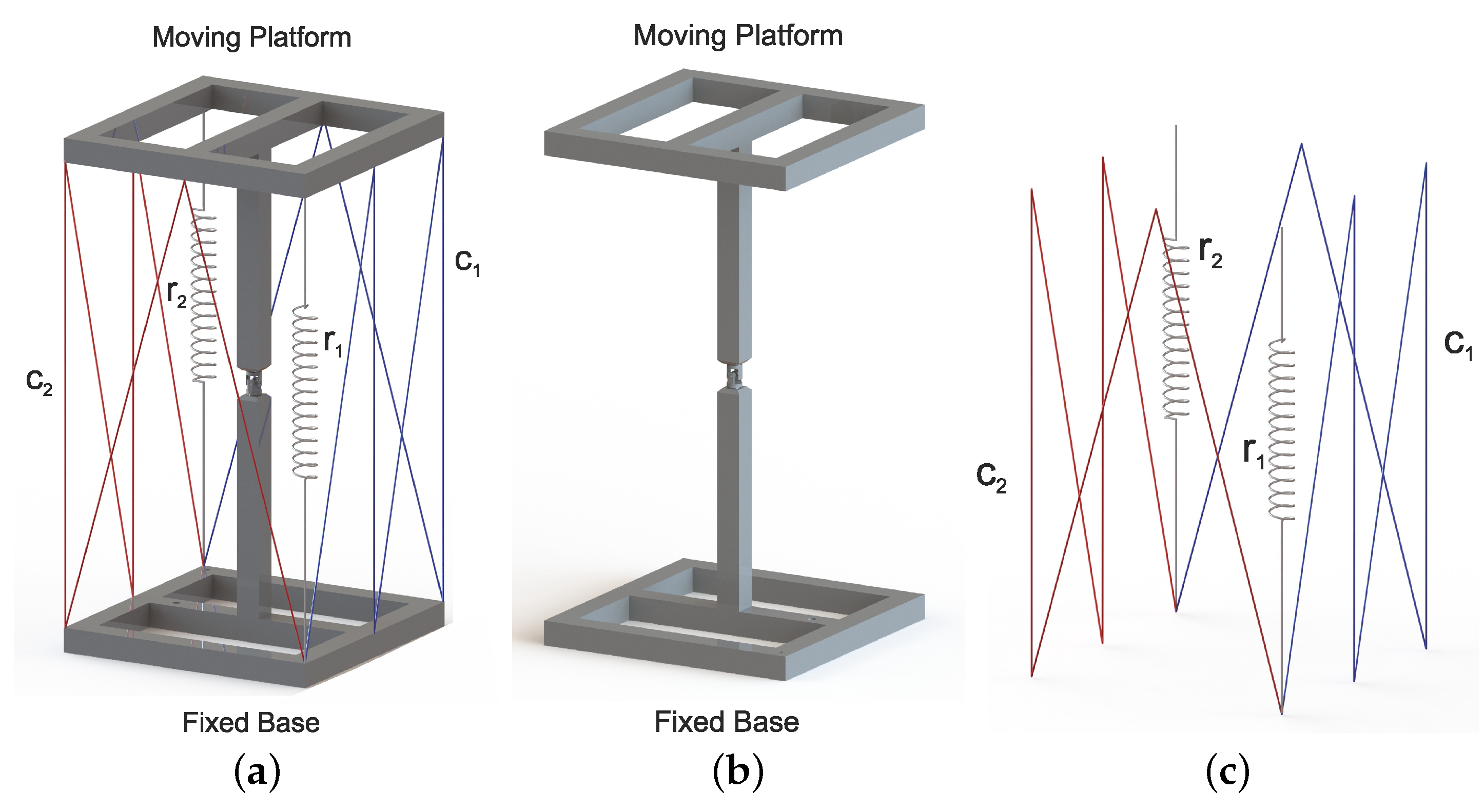
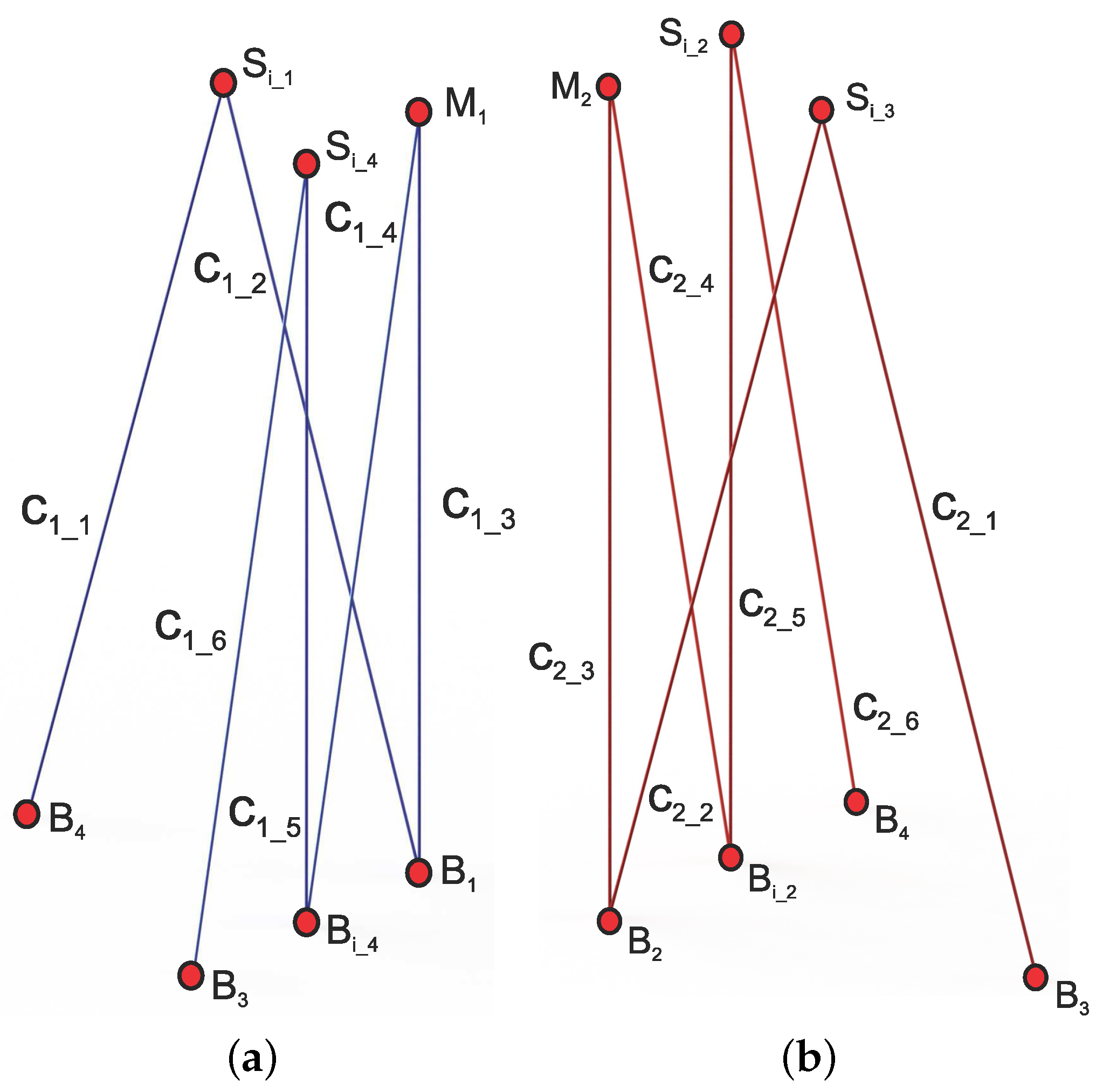
2.1. Description of the Modified Class 2 Tensegrity Robot
2.2. Kinematic Position Analysis of the Modified Class 2 Tensegrity Robot
2.2.1. Denavit–Hartenberg Parameters
- is the distance measured from the axis to the axis along the axis.
- is the angle between the axis and the axis measured around the axis, following the right-hand convention.
- is the distance measured from the axis to the axis along the axis.
- is the angle between the axis and the axis measured around the axis, following the right-hand convention.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | ||||
|---|---|---|---|---|
| mm | rad | mm | rad | |
| 1 | 0 | 0 | ||
| 2 | 0 |
2.2.2. Direct Kinematic Position Analysis
2.2.3. Inverse Kinematic Position Analysis
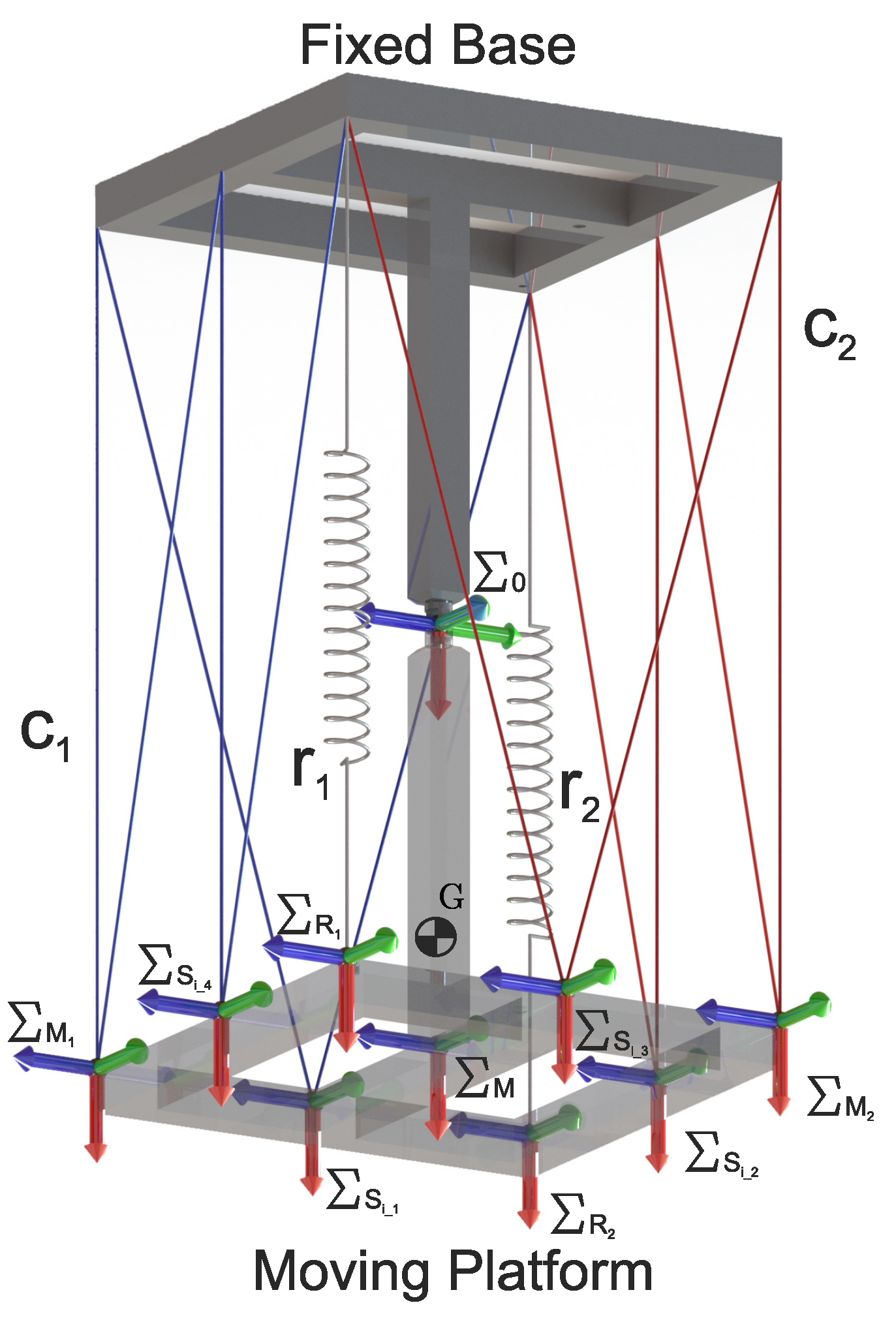
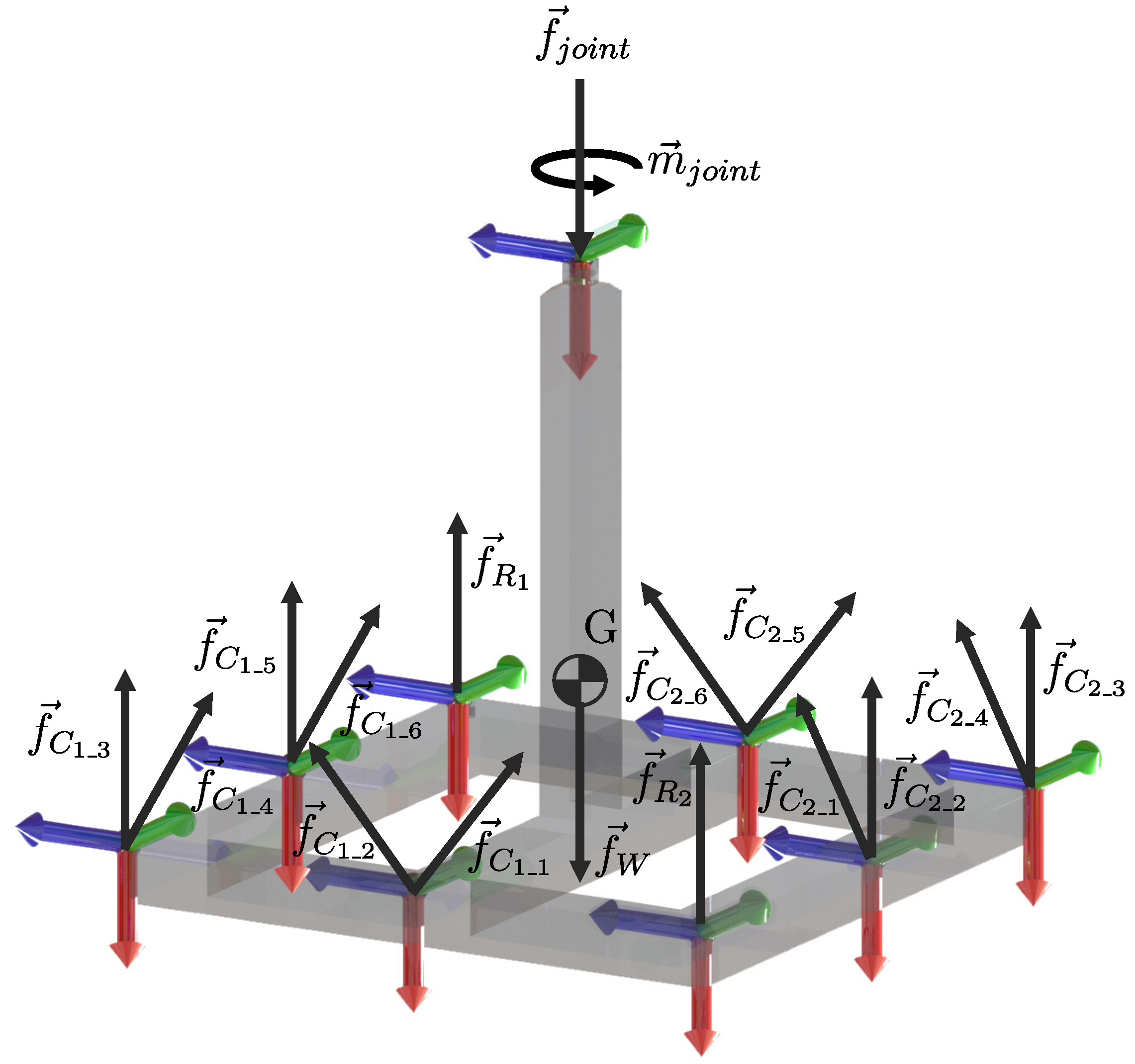
2.3. Static Analysis for the Class 2 Tensegrity Robot
- Total lengths, and , corresponding to cables and , respectively.
- The lengths, and , corresponding to the springs and , respectively.
- The position and orientation of the reference frames, , , , , , , , , and , with respect to the reference frame.
- The lengths of the undeformed springs, and , corresponding to the tension springs and , respectively.
- The position of the centroid, G, corresponding to the moving platform with respect to the reference frame .
- The total mass of the robot.
2.4. Form-Finding Analysis
3. Numerical Example
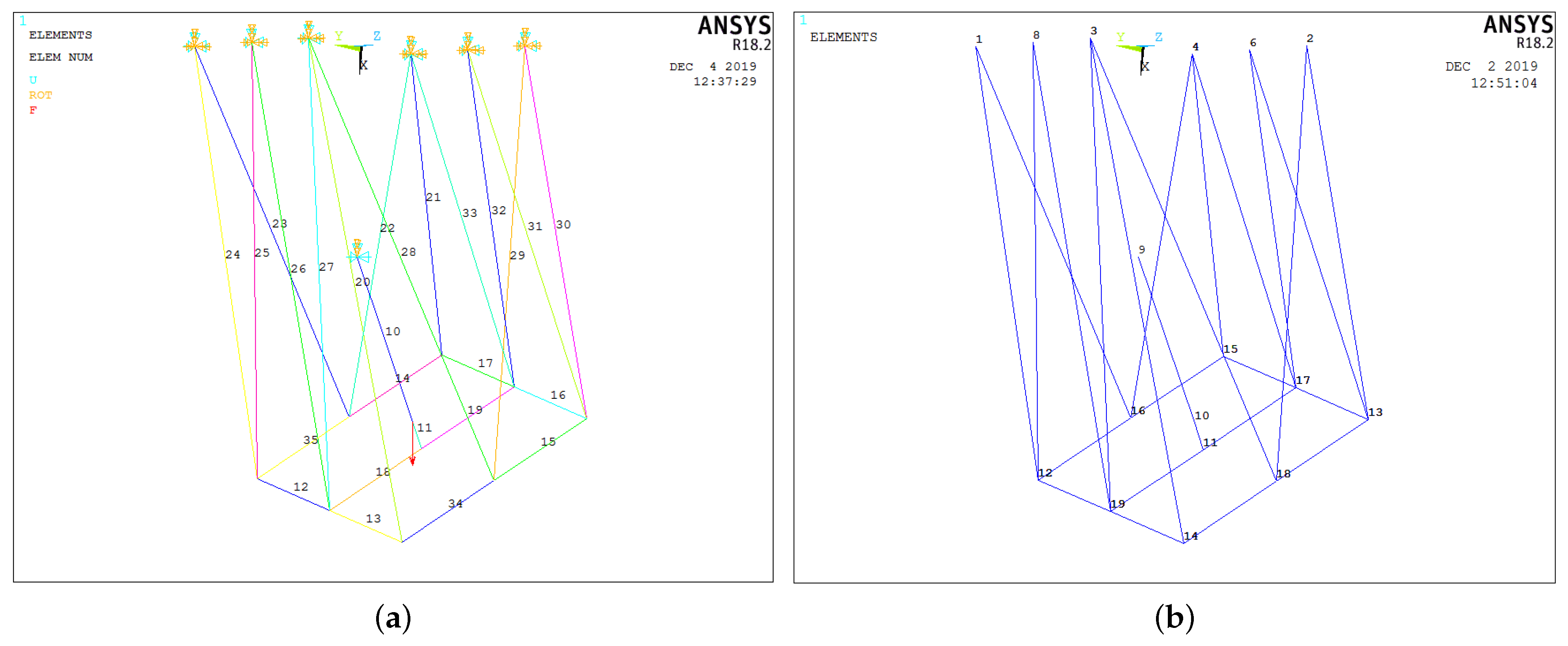
4. Numerical Experiments
- The BEAM188 element is used to represent the rigid bars of the robot as they are suitable elements to analyze thin structures in three dimensions. The BEAM188 element has two nodes and six degrees of freedom at each node.
- The COMBIN14 element is used to represent both the wire segments , with and , and the tension springs and . The COMBIN14 element is suitable for modeling bodies subjected to uniaxial tension–compression loads. With proper constraints, the COMBIN14 element, having three degrees of freedom per node, is also used to represent combined spring-damper systems.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Buckminster Fuller, R.; Applewhite, E.J. Synergetics, Explorations in the Geometry of Thinking; Macmillan Publishing Co. Inc.: New York, NY, USA, 1975; ISBN 0-02-065320-4. [Google Scholar]
- Pugh, A. An Introduction to Tensegrity; University of California Press: Los Angeles, CA, USA, 1976; ISBN 0-520-02996-8. [Google Scholar]
- Peng, Y.; Sakai, Y.; Nakagawa, K.; Funabora, Y.; Aoyama, T.; Yokoe, K.; Doki, S. Funabot-Suit: A bio-inspired and McKibben muscle-actuated suit for natural kinesthetic perception. Biomim. Intell. Robot. 2023, 3, 100127. [Google Scholar] [CrossRef]
- Mao, Z.; Peng, Y.; Hu, C.; Ding, R.; Yamada, Y.; Maeda, S. Soft computing-based predictive modeling of flexible electrohydrodynamic pumps. Biomim. Intell. Robot. 2023, 3, 100114. [Google Scholar] [CrossRef]
- Mohith, S.; Upadhya, A.R.; Navin, K.P.; Kulkarni, S.M.; Rao, M. Recent trends in piezoelectric actuators for precision motion and their applications: A review. Smart Mater. Struct. 2021, 30, 013002. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, Z.; Xu, M.; Mai, J.; Wang, Q. Low-Complexity Output Feedback Control With Prescribed Performance for Bioinspired Cable-Driven Actuator. IEEE ASME Trans. Mechatron. 2023, 1–12. [Google Scholar] [CrossRef]
- Begey, J.; Vedrines, M.; Andreff, N.; Renaud, P. Selection of actuation mode for tensegrity mechanisms: The case study of the actuated Snelson cross. Mech. Mach. Theory 2020, 152, 103881. [Google Scholar] [CrossRef]
- Ikemoto, S.; Tsukamoto, K.; Yoshimitsu, Y. Development of a Modular Tensegrity Robot Arm Capable of Continuous Bending. Front. Robot. 2021, 8, 774253. [Google Scholar] [CrossRef]
- Yeshmukhametov, A.; Koganezawa, K. A Simplified Kinematics and Kinetics Formulation for Prismatic Tensegrity Robots: Simulation and Experiments. Robotics 2023, 12, 56. [Google Scholar] [CrossRef]
- Jin, Y.; Yang, Q.; Liu, X.; Lian, B.; Sun, T. Type synthesis of worm-like planar tensegrity mobile robot. Mech. Mach. Theory 2024, 191, 105476. [Google Scholar] [CrossRef]
- Carreño, F.; Post, M.A. Design of a novel wheeled tensegrity robot: A comparison of tensegrity concepts and a prototype for travelling air ducts. Robot. Biomim. 2017, 5, 1. [Google Scholar] [CrossRef]
- Zappetti, D.; Jeong, S.H.; Shintake, J.; Floreano, D. Phase Changing Materials-Based Variable-Stiffness Tensegrity Structures. Soft Robot. 2020, 7, 362–369. [Google Scholar] [CrossRef] [PubMed]
- Manríquez-Padilla, C.G.; Camarillo-Gómez, K.A.; Pérez-Soto, G.I.; Rodríguez-Reséndiz, J.; Crane, C.D. Development and Kinematic Position Analysis of a Novel Class 2 Tensegrity Robot. In Proceedings of the ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018. [Google Scholar]
- Skelton, R.E.; De Oliveira, M.C. Tensegrity Systems; Springer: New York, NY, USA, 2009; ISBN 978-0-387-74241-0. [Google Scholar]
- Lee, S.; Lieu, Q.X.; Vo, T.P.; Lee, J. Deep Neural Networks for Form-Finding of Tensegrity Structures. Mathematics 2022, 10, 1822. [Google Scholar] [CrossRef]
- Yuan, Y.-F.; Ma, S.; Jiang, S.-H. Form-finding of tensegrity structures based on the Levenberg–Marquardt method. Comput. Struct. 2017, 192, 171–180. [Google Scholar] [CrossRef]
- Song, K.; Scarpa, F.; Schenk, M. Form-finding of tessellated tensegrity structures. Eng. Struct. 2022, 252, 113627. [Google Scholar] [CrossRef]
- Zhang, P.; Zhou, J.; Chen, J. Form-finding of complex tensegrity structures using constrained optimization method. Compos. Struct. 2021, 268, 113971. [Google Scholar] [CrossRef]
- Uzun, F. Form-finding of free-form tensegrity structures by genetic algorithm–based total potential energy minimization. Adv. Struct. Eng. 2017, 20, 784–796. [Google Scholar] [CrossRef]
- Manríquez-Padilla, C.G.; Zavala-Pérez, O.A.; Pérez-Soto, G.I.; Rodríguez-Reséndiz, J.; Camarillo-Gómez, K.A. Form-Finding Analysis of a Class 2 Tensegrity Robot. Appl. Sci. 2019, 9, 2948. [Google Scholar] [CrossRef]
- Hartenberg, R.S.; Denavit, J. A kinematic notation for lower-pair mechanisms based on metrics. J. Appl. Mech. 1955, 2, 215–221. [Google Scholar] [CrossRef]
- Liu, Y.; Bi, Q.; Yue, X.; Wu, J.; Yang, B.; Li, Y. A review on tensegrity structures-based robots. J. Mechmachtheory 2022, 168, 104571. [Google Scholar] [CrossRef]
- Kahn, M.E.; Roth, B. The Near-Minimum-Time Control Of Open-Loop Articulated Kinematic Chains. J. Dyn. Syst. Meas. Control. 1971, 93, 164–172. [Google Scholar] [CrossRef]
- Jazar, R.N. Theory of Applied Robotics: Kinematics, Dynamics and Control, 2nd ed.; Springer: New York, NY, USA, 2010; ISBN 978-1-4419-1749-2. [Google Scholar]
- Beer, F.P.; Johnston, E.R.; Mazurek, D.F.; Eisenberg, E.R. Mecánica Vectorial para Ingenieros: Estática, 12th ed.; Mc. Graw Hill: Ciudad de México, Mexico, 2021; ISBN 1456287605. [Google Scholar]






| Definition | Variable | Value |
|---|---|---|
| Distance from the common point of the axes and to the moving platform | 210 mm | |
| Distance from the fixed base to the common point of the axes and | 190 mm | |
| Width of the moving platform | 220 mm | |
| Initial condition of | −1.5708 rad | |
| Initial condition of | −1.5708 rad | |
| Joints coordinate increment | 0.0087 rad | |
| Number of geometrical configurations analyzed | n | 131,044 |
| Initial x coordinate of the centroid, G, with respect to the reference frame | 354.0442 mm | |
| Initial y coordinate of the centroid, G, with respect to the reference frame | 0 mm | |
| Initial z coordinate of the centroid, G, with respect to the reference frame | 76.4886 mm | |
| Mass of the moving platform | m | 0.4732 kg |
| Experiment Numbers | (rad) | (rad) |
|---|---|---|
| 1 | −0.5616 | 0.3432 |
| 2 | −0.3441 | 1.5438 |
| 3 | 1.5612 | 0.0039 |
| 4 | −1.0836 | 0.3258 |
| Element Number | Physical Element | Element Type |
|---|---|---|
| 1 | Rigid elements | BEAM188 |
| 2–7 | Cable | COMBIN14 |
| 8–13 | Cable | COMBIN14 |
| 14 | Spring | COMBIN14 |
| 15 | Spring | COMBIN14 |
| Analytical | ANSYS®R18.2 | Error | |
|---|---|---|---|
| Experiment 1 | |||
| 0.52083 N | 0.52080 N | 0.0041% | |
| 0.47178 N | 0.47176 N | 0.0024% | |
| 1.85472 N | 1.8546 N | 0.0064% | |
| 1.40022 N | 1.4002 N | 0.0014% | |
| 4.91739 N | 4.9170 N | 0.0079% | |
| 18.6549 N·mm | 18.653 N·mm | 0.0101% | |
| Experiment 2 | |||
| 0.40010 N | 0.40037 N | 0.0691% | |
| 0.60663 N | 0.60661 N | 0.0030% | |
| 0.98630 N | 0.98625 N | 0.0050% | |
| 0.11156 N | 0.11158 N | 0.01792% | |
| 4.91584 N | 4.9157 N | 0.0028% | |
| 35.61024 N·mm | 35.602 N·mm | 0.0231% | |
| Experiment 3 | |||
| 0.18530 N | 0.18529 N | 0.0023% | |
| 0.49770 N | 0.49768 N | 0.0030% | |
| 1.24109 N | 1.2411 N | 0.0008% | |
| 1.73608 N | 1.7361 N | 0.0011% | |
| 5.05786 N | 5.0578 N | 0.0011% | |
| 64.04513 N·mm | 64.029 N·mm | 0.0251% | |
| Experiment 4 | |||
| 0.51191 N | 0.51189 N | 0.0023% | |
| 0.40380 N | 0.40379 N | 0.0041% | |
| 1.74458 N | 1.7445 N | 0.0045% | |
| 1.05128 N | 1.0513 N | 0.0019% | |
| 4.91154 N | 4.9114 N | 0.0028% | |
| 21.71365 N·mm | 21.710 N·mm | 0.0168% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pérez-Soto, G.I.; Camarillo-Gómez, K.A.; Rodríguez-Reséndiz, J.; Manríquez-Padilla, C.G. Novel Technique to Increase the Effective Workspace of a Soft Robot. Micromachines 2024, 15, 197. https://doi.org/10.3390/mi15020197
Pérez-Soto GI, Camarillo-Gómez KA, Rodríguez-Reséndiz J, Manríquez-Padilla CG. Novel Technique to Increase the Effective Workspace of a Soft Robot. Micromachines. 2024; 15(2):197. https://doi.org/10.3390/mi15020197
Chicago/Turabian StylePérez-Soto, Gerardo I., Karla A. Camarillo-Gómez, Juvenal Rodríguez-Reséndiz, and Carlos G. Manríquez-Padilla. 2024. "Novel Technique to Increase the Effective Workspace of a Soft Robot" Micromachines 15, no. 2: 197. https://doi.org/10.3390/mi15020197
APA StylePérez-Soto, G. I., Camarillo-Gómez, K. A., Rodríguez-Reséndiz, J., & Manríquez-Padilla, C. G. (2024). Novel Technique to Increase the Effective Workspace of a Soft Robot. Micromachines, 15(2), 197. https://doi.org/10.3390/mi15020197