Editorial for the Special Issue on Fundamentals and Applications of Micro/Nanorobotics




{kind=link}
1. Introduction to This Special Issue
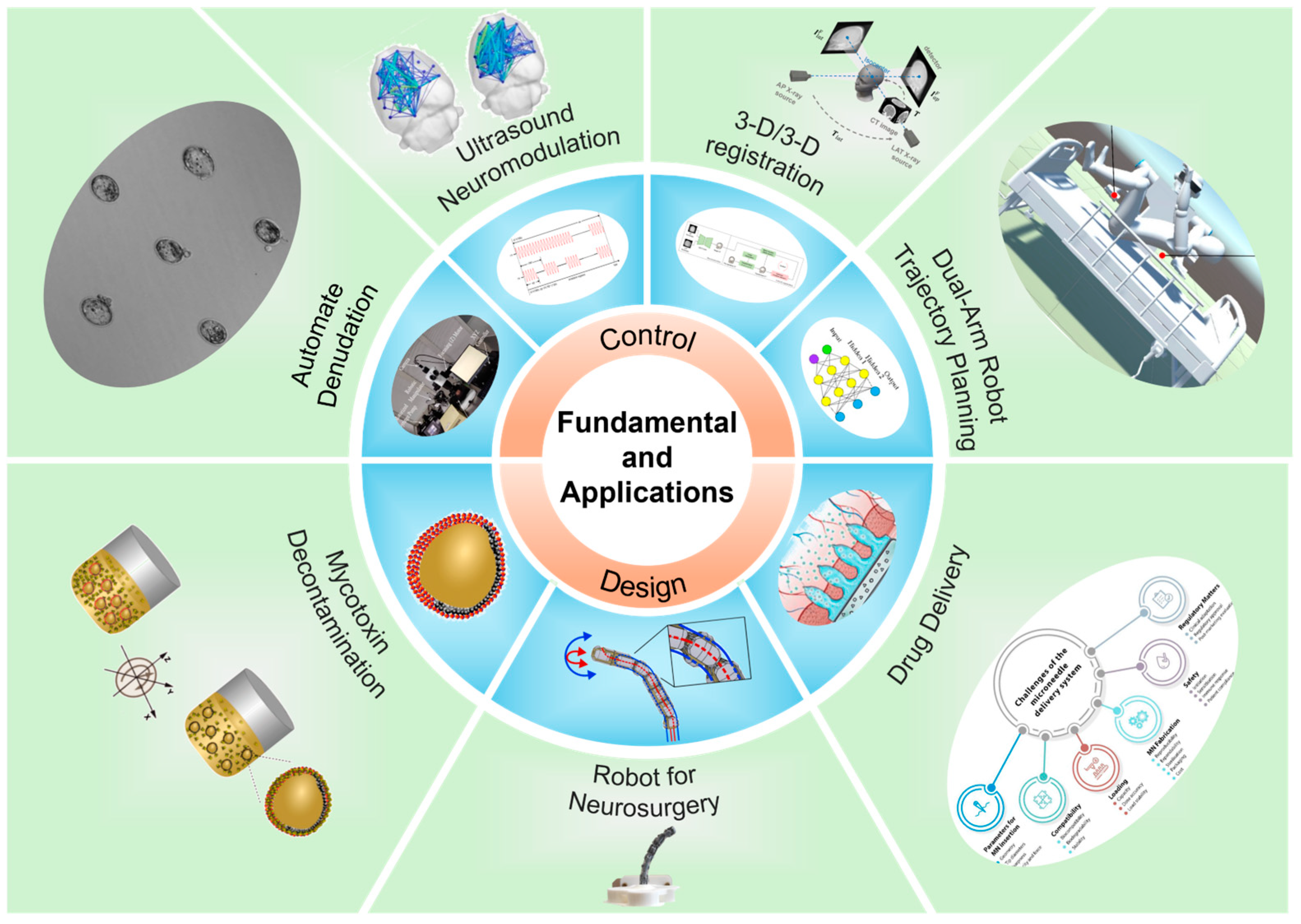
2. Designs Proposed in This Special Issue
3. Control Methods Discussed in This Special Issue
4. Applications Discussed in This Special Issue
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.; Esteban-Fernández de Ávila, B.; Gao, W.; Zhang, L.; Wang, J. Micro/nanorobots for biomedicine: Delivery, surgery, sensing, and detoxification. Sci. Robot. 2017, 2, eaam6431. [Google Scholar] [CrossRef] [PubMed]
- Luo, M.; Feng, Y.; Wang, T.; Guan, J. Micro-/nanorobots at work in active drug delivery. Adv. Funct. Mater. 2018, 28, 1706100. [Google Scholar] [CrossRef]
- Choi, J.; Hwang, J.; Kim, J.Y.; Choi, H. Recent progress in magnetically actuated microrobots for targeted delivery of therapeutic agents. Adv. Healthc. Mater. 2021, 10, 2001596. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Yang, S.; Zhang, L. Untethered micro/nanorobots for remote sensing: Toward intelligent platform. Nano-Micro Lett. 2024, 16, 40. [Google Scholar] [CrossRef]
- Vikram Singh, A.; Sitti, M. Targeted drug delivery and imaging using mobile milli/microrobots: A promising future towards theranostic pharmaceutical design. Curr. Pharm. Des. 2016, 22, 1418–1428. [Google Scholar] [CrossRef]
- Chen, H.; Wang, Y.; Liu, Y.; Zou, Q.; Yu, J. Sensing of fluidic features using colloidal microswarms. ACS Nano 2022, 16, 16281–16291. [Google Scholar] [CrossRef]
- Yu, J.; Jin, D.; Chan, K.-F.; Wang, Q.; Yuan, K.; Zhang, L. Active generation and magnetic actuation of microrobotic swarms in bio-fluids. Nat. Commun. 2019, 10, 5631. [Google Scholar] [CrossRef]
- Gao, Y.; Guo, Y.; Yang, Y.; Tang, Y.; Wang, B.; Yan, Q.; Chen, X.; Cai, J.; Fang, L.; Xiong, Z.; et al. Magnetically Manipulated Optoelectronic Hybrid Microrobots for Optically Targeted Non-Genetic Neuromodulation. Adv. Mater. 2024, 36, 2305632. [Google Scholar] [CrossRef] [PubMed]
- Iványi, G.T.; Nemes, B.; Gróf, I.; Fekete, T.; Kubacková, J.; Tomori, Z.; Bánó, G.; Vizsnyiczai, G.; Kelemen, L. Optically Actuated soft Microrobot Family for Single-cell Manipulation. Adv. Mater. 2024, 36, 2401115. [Google Scholar] [CrossRef]
- Diwakar, N.M.; Kunti, G.; Miloh, T.; Yossifon, G.; Velev, O.D.; Science, I. AC electrohydrodynamic propulsion and rotation of active particles of engineered shape and asymmetry. Curr. Opin. Colloid Interface Sci. 2022, 59, 101586. [Google Scholar] [CrossRef]
- Zheng, C.; Lin, J.; Song, X.; Gan, Q.; Lin, X. TiO2-nanoparticle-shelled light-driven microcleaner for fast and highly efficient degradation of organic pollutants. ACS Appl. Nano Mater. 2022, 5, 16573–16583. [Google Scholar] [CrossRef]
- Deng, Y.; Paskert, A.; Zhang, Z.; Wittkowski, R.; Ahmed, D. An acoustically controlled helical microrobot. Sci. Adv. 2023, 9, eadh5260. [Google Scholar] [CrossRef] [PubMed]
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; Sitti, M. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554, 81–85. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Wang, L.; Xiang, Y.; Liao, F.; Li, N.; Li, J.; Wang, J.; Wu, Q.; Zhou, C.; Yang, Y.; et al. Magnetic soft microfiberbots for robotic embolization. Sci. Robot. 2024, 9, eadh2479. [Google Scholar] [CrossRef] [PubMed]
- Dong, X.; Xiao, B.; Vu, H.; Lin, H.; Sitti, M. Millimeter-scale soft capsules for sampling liquids in fluid-filled confined spaces. Sci. Adv. 2024, 10, eadp2758. [Google Scholar] [CrossRef]
- Peyer, K.E.; Tottori, S.; Qiu, F.; Zhang, L.; Nelson, B.J. Magnetic helical micromachines. Chem. –A Eur. J. 2013, 19, 28–38. [Google Scholar] [CrossRef]
- Nam, J.; Lee, W.; Kim, J.; Jang, G. Magnetic helical robot for targeted drug-delivery in tubular environments. IEEE/ASME Trans. Mechatron. 2017, 22, 2461–2468. [Google Scholar] [CrossRef]
- Ghadami, S.; Shum, H. Designing a magnetic micro-robot for transporting stiff filamentous microcargo. Phys. Fluids 2024, 36, 081908. [Google Scholar] [CrossRef]
- Yu, J.; Wang, B.; Du, X.; Wang, Q.; Zhang, L. Ultra-extensible ribbon-like magnetic microswarm. Nat. Commun. 2018, 9, 3260. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, Q.; Ning, Z.; Chan, K.F.; Jiang, J.; Wang, Y.; Su, L.; Jiang, S.; Wang, B.; Ip, B.Y.M.; et al. Tracking and navigation of a microswarm under laser speckle contrast imaging for targeted delivery. Sci. Robot. 2024, 9, eadh1978. [Google Scholar] [CrossRef]
- Felfoul, O.; Mohammadi, M.; Taherkhani, S.; De Lanauze, D.; Zhong Xu, Y.; Loghin, D.; Essa, S.; Jancik, S.; Houle, D.; Lafleur, M.; et al. Magneto-aerotactic bacteria deliver drug-containing nanoliposomes to tumour hypoxic regions. Nat. Nanotechnol. 2016, 11, 941–947. [Google Scholar] [CrossRef] [PubMed]
- Park, S.J.; Park, S.-H.; Cho, S.; Kim, D.-M.; Lee, Y.; Ko, S.Y.; Hong, Y.; Choy, H.E.; Min, J.J.; Park, J.O.; et al. New paradigm for tumor theranostic methodology using bacteria-based microrobot. Sci. Rep. 2013, 3, 3394. [Google Scholar] [CrossRef]
- Akolpoglu, M.B.; Alapan, Y.; Dogan, N.O.; Baltaci, S.F.; Yasa, O.; Aybar Tural, G.; Sitti, M. Magnetically steerable bacterial microrobots moving in 3D biological matrices for stimuli-responsive cargo delivery. Sci. Adv. 2022, 8, eabo6163. [Google Scholar] [CrossRef]
- Tottori, S.; Zhang, L.; Qiu, F.; Krawczyk, K.K.; Franco-Obregón, A.; Nelson, B.J. Magnetic helical micromachines: Fabrication, controlled swimming, and cargo transport. Adv. Mater. 2012, 24, 811–816. [Google Scholar] [CrossRef]
- Kummer, M.P.; Abbott, J.J.; Kratochvil, B.E.; Borer, R.; Sengul, A.; Nelson, B.J. OctoMag: An electromagnetic system for 5-DOF wireless micromanipulation. IEEE Trans. Robot. 2010, 26, 1006–1017. [Google Scholar] [CrossRef]
- Gauri, H.M.; Patel, R.; Lombardo, N.S.; Bevan, M.A.; Bharti, B. Field-Directed Motion, Cargo Capture, and Closed-Loop Controlled Navigation of Microellipsoids. Small 2024, 2403007. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Chen, H.; Zou, Q.; Du, X.; Wang, Y.; Yu, J. Automatic navigation of microswarms for dynamic obstacle avoidance. IEEE Trans. Robot. 2023, 39, 2770–2785. [Google Scholar] [CrossRef]
- Yang, L.; Yu, J.; Zhang, L. Statistics-based automated control for a swarm of paramagnetic nanoparticles in 2-D space. IEEE Trans. Robot. 2019, 36, 254–270. [Google Scholar] [CrossRef]
- Yu, J.; Xu, T.; Lu, Z.; Vong, C.I.; Zhang, L. On-demand disassembly of paramagnetic nanoparticle chains for microrobotic cargo delivery. IEEE Trans. Robot. 2017, 33, 1213–1225. [Google Scholar] [CrossRef]
- Kim, H.; Kim, M.J. Electric field control of bacteria-powered microrobots using a static obstacle avoidance algorithm. IEEE Trans. Robot. 2015, 32, 125–137. [Google Scholar] [CrossRef]
- Chen, C.; Ding, S.; Wang, J. Materials consideration for the design, fabrication and operation of microscale robots. Nat. Rev. Mater. 2024, 9, 159–172. [Google Scholar] [CrossRef]
- Schmidt, C.K.; Medina-Sánchez, M.; Edmondson, R.J.; Schmidt, O.G. Engineering microrobots for targeted cancer therapies from a medical perspective. Nat. Commun. 2020, 11, 5618. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Wu, T.; Liu, R.; Zhang, Z.; Liu, J. Selective and Independent Control of Microrobots in a Magnetic Field: A Review. Engineering 2023, 24, 21–38. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, H.; Xie, L.; Liu, J.; Zhang, L.; Yu, J. Swarm Autonomy: From Agent Functionalization to Machine Intelligence. Adv. Mater. 2024, 2312956. [Google Scholar] [CrossRef]
- Dabbagh, S.R.; Sarabi, M.R.; Birtek, M.T.; Seyfi, S.; Sitti, M.; Tasoglu, S. 3D-printed microrobots from design to translation. Nat. Commun. 2022, 13, 5875. [Google Scholar] [CrossRef]
- Zhao, S.; Sun, D.; Zhang, J.; Lu, H.; Wang, Y.; Xiong, R.; Grattan, K.T.V. Actuation and biomedical development of micro-/nanorobots—A review. Mater. Today Nano 2022, 18, 100223. [Google Scholar] [CrossRef]
- Dragone, D.; Donadio, F.F.; Mirabelli, C.; Cosentino, C.; Amato, F.; Zaffino, P.; Spadea, M.F.; La Torre, D.; Merola, A. Design and Experimental Validation of a 3D-Printed Embedded-Sensing Continuum Robot for Neurosurgery. Micromachines 2023, 14, 1743. [Google Scholar] [CrossRef]
- Lu, D.; Tang, S.; Li, Y.; Cong, Z.; Zhang, X.; Wu, S. Magnetic-propelled Janus yeast cell robots functionalized with metal-organic frameworks for mycotoxin decontamination. Micromachines 2021, 12, 797. [Google Scholar] [CrossRef] [PubMed]
- Zhai, R.; Shan, G.; Dai, C.; Hao, M.; Zhu, J.; Ru, C.; Sun, Y. Automated Denudation of Oocytes. Micromachines 2022, 13, 1301. [Google Scholar] [CrossRef]
- Zhang, M.; Li, B.; Liu, Y.; Tang, R.; Lang, Y.; Huang, Q.; He, J. Different modes of low-frequency focused ultrasound-mediated attenuation of epilepsy based on the topological theory. Micromachines 2021, 12, 1001. [Google Scholar] [CrossRef]
- Tang, W.; Cheng, C.; Ai, H.; Chen, L. Dual-arm robot trajectory planning based on deep reinforcement learning under complex environment. Micromachines 2022, 13, 564. [Google Scholar] [CrossRef] [PubMed]
- An, Z.; Ma, H.; Liu, L.; Wang, Y.; Lu, H.; Zhou, C.; Xiong, R.; Hu, J. Robust orthogonal-view 2-D/3-D rigid registration for minimally invasive surgery. Micromachines 2021, 12, 844. [Google Scholar] [CrossRef]
- Avcil, M.; Çelik, A. Microneedles in drug delivery: Progress and challenges. Micromachines 2021, 12, 1321. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.G.; Raj, R.R.; Day, N.B.; Shields IV, C.W. Microrobots for biomedicine: Unsolved challenges and opportunities for translation. ACS Nano 2023, 17, 14196–14204. [Google Scholar] [CrossRef] [PubMed]
- Sadeghi, A.; Ebrahimi, M.; Shahryari, S.; Assadpour, E.; Jafari, S.M. Potential applications of encapsulated yeasts especially within alginate and chitosan as smart bioreactors and intelligent micro-machines. Carbohydr. Polym. Technol. Appl. 2024, 7, 100513. [Google Scholar] [CrossRef]
- Li, J.; Dekanovsky, L.; Khezri, B.; Wu, B.; Zhou, H.; Sofer, Z. Biohybrid micro-and nanorobots for intelligent drug delivery. Cyborg. Bionic Syst. 2022. [Google Scholar] [CrossRef]
- Shi, C.; Luo, X.; Qi, P.; Li, T.; Song, S.; Najdovski, Z.; Fukuda, T.; Ren, H. Shape sensing techniques for continuum robots in minimally invasive surgery: A survey. IEEE Trans. Biomed. Eng. 2016, 64, 1665–1678. [Google Scholar] [CrossRef]
- Yang, Z.; Yang, H.; Cao, Y.; Cui, Y.; Zhang, L. Magnetically actuated continuum medical robots: A review. Adv. Intell. Syst. 2023, 5, 2200416. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, C.; Zhang, Z.; Wang, X.; Lu, H.; Yu, J. Editorial for the Special Issue on Fundamentals and Applications of Micro/Nanorobotics. Micromachines 2024, 15, 1303. https://doi.org/10.3390/mi15111303
Wei C, Zhang Z, Wang X, Lu H, Yu J. Editorial for the Special Issue on Fundamentals and Applications of Micro/Nanorobotics. Micromachines. 2024; 15(11):1303. https://doi.org/10.3390/mi15111303
Chicago/Turabian StyleWei, Chunyun, Zhuoran Zhang, Xian Wang, Haojian Lu, and Jiangfan Yu. 2024. "Editorial for the Special Issue on Fundamentals and Applications of Micro/Nanorobotics" Micromachines 15, no. 11: 1303. https://doi.org/10.3390/mi15111303
APA StyleWei, C., Zhang, Z., Wang, X., Lu, H., & Yu, J. (2024). Editorial for the Special Issue on Fundamentals and Applications of Micro/Nanorobotics. Micromachines, 15(11), 1303. https://doi.org/10.3390/mi15111303