
Femtosecond Laser Direct Writing of Gecko-Inspired Switchable Adhesion Interfaces on a Flexible Substrate


 and
and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. Methods
3. Results
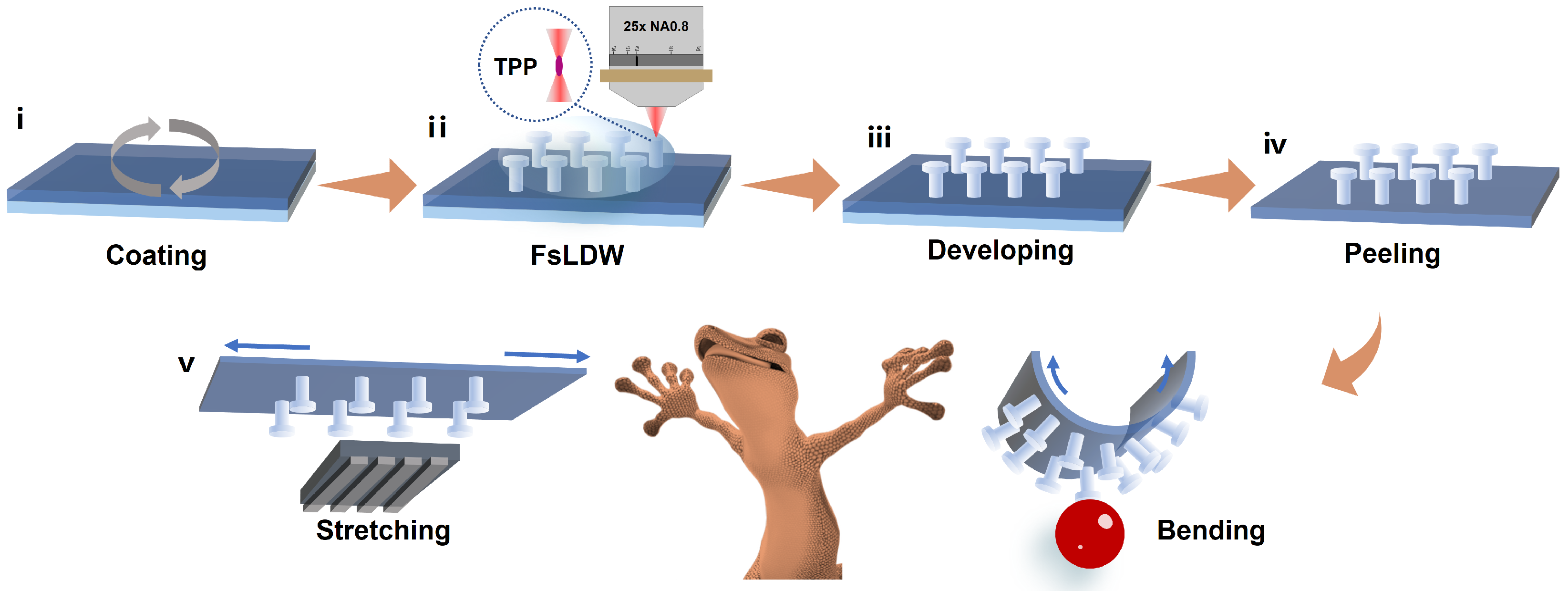
3.1. Microfabrication of BSAI on a Flexible Substrate
3.2. Geometric Characterizations of BSAIs
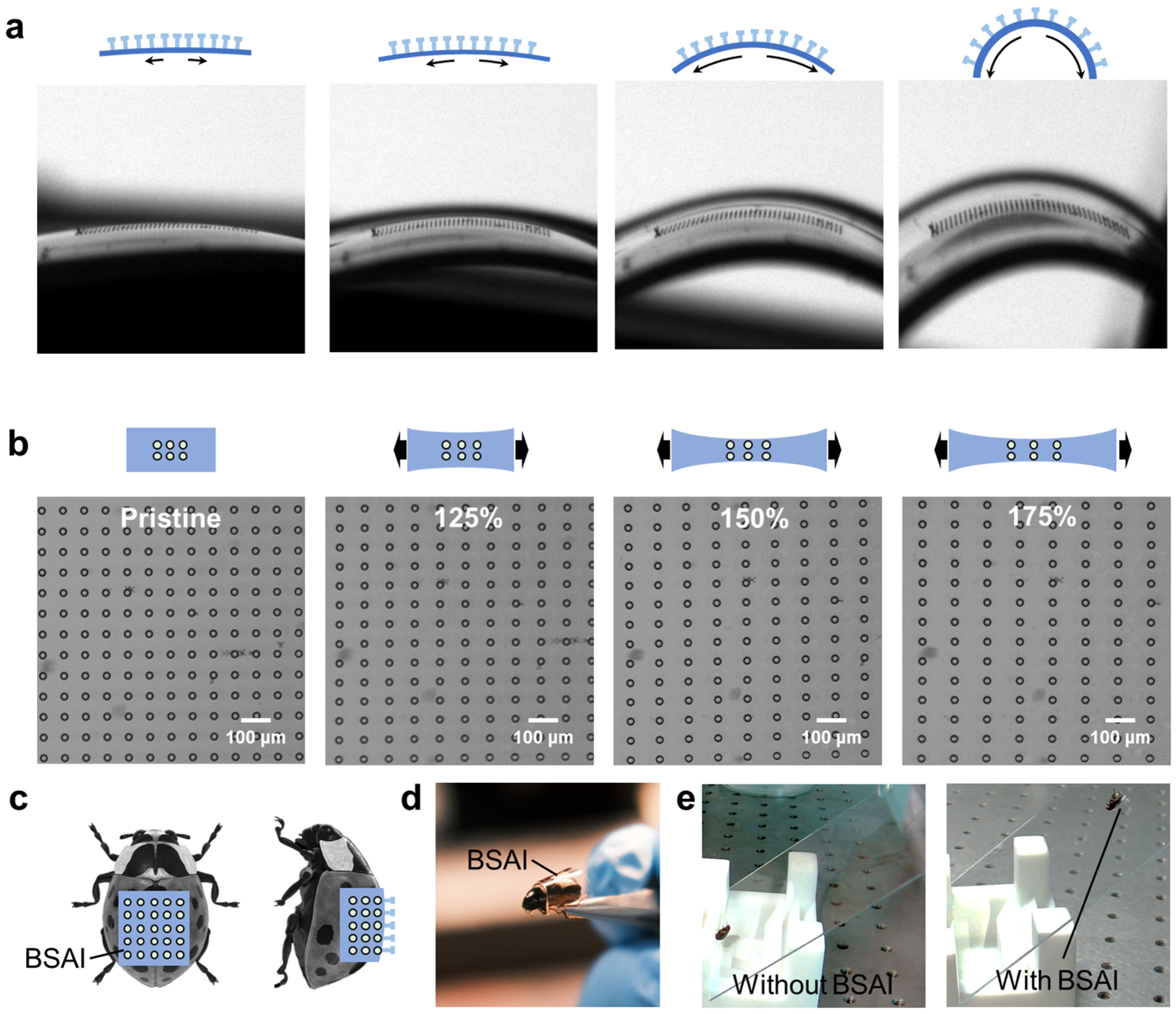
3.3. Deformation Characterizations of BSAIs
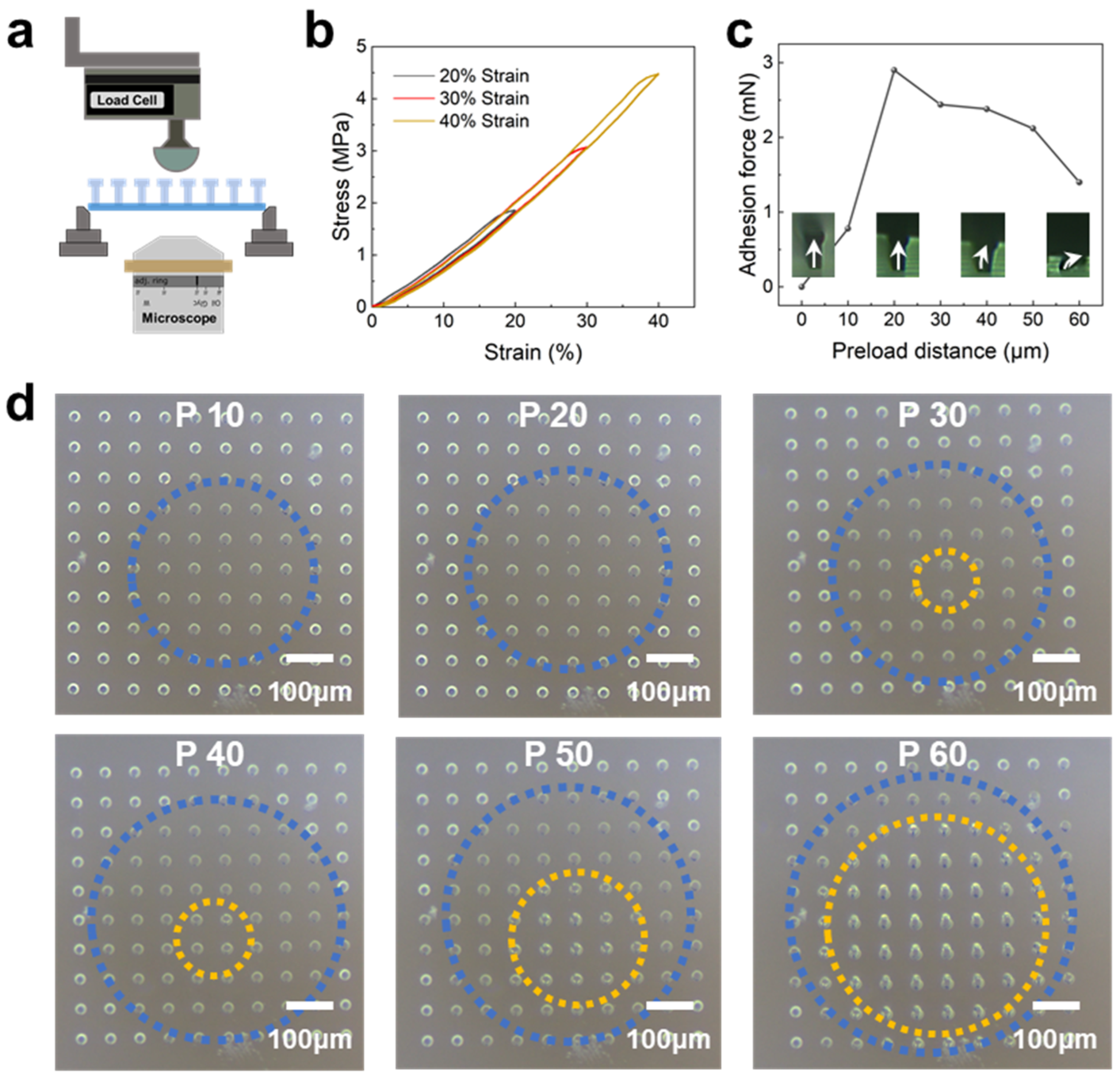
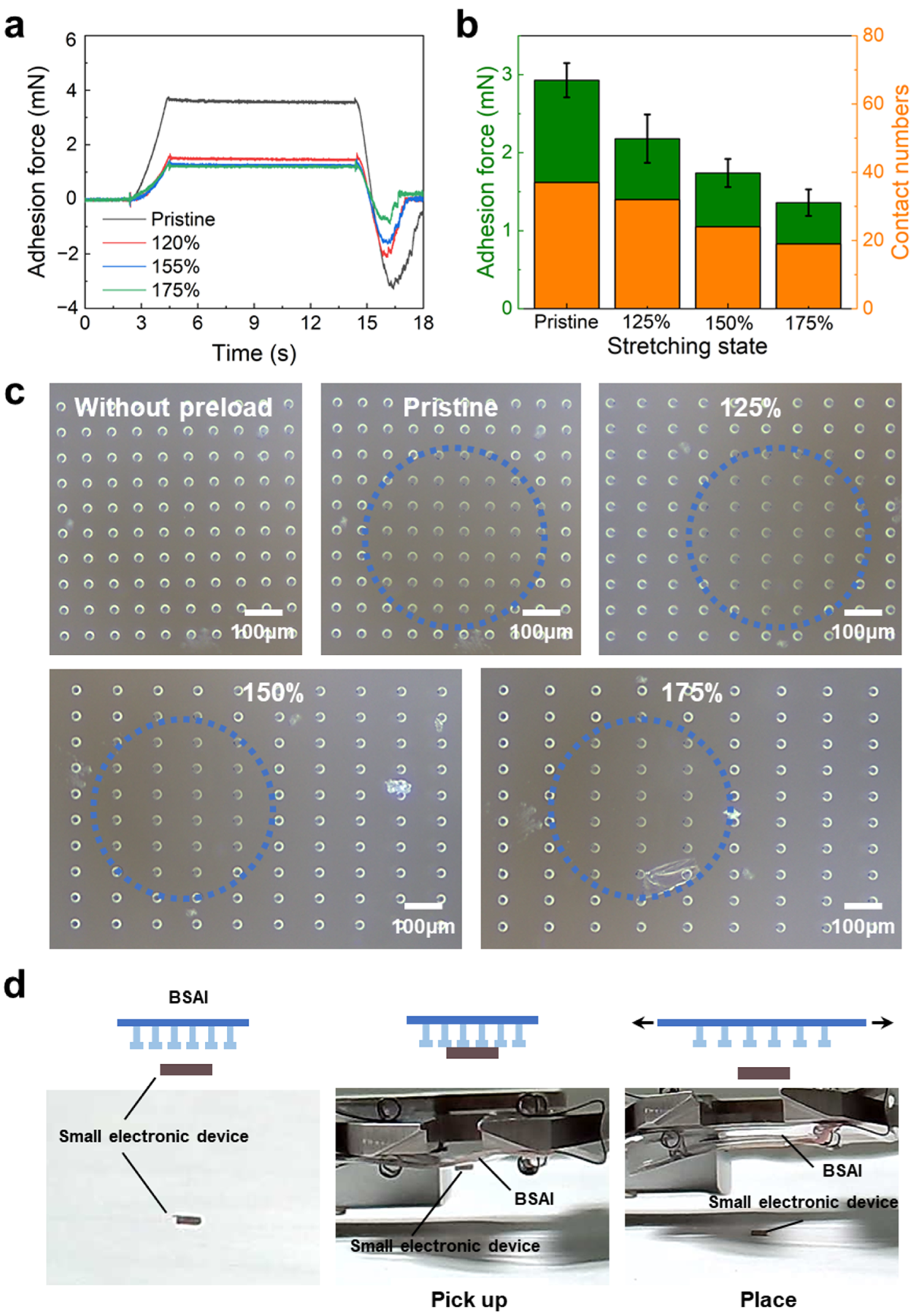
3.4. Force Characterizations of BSAIs
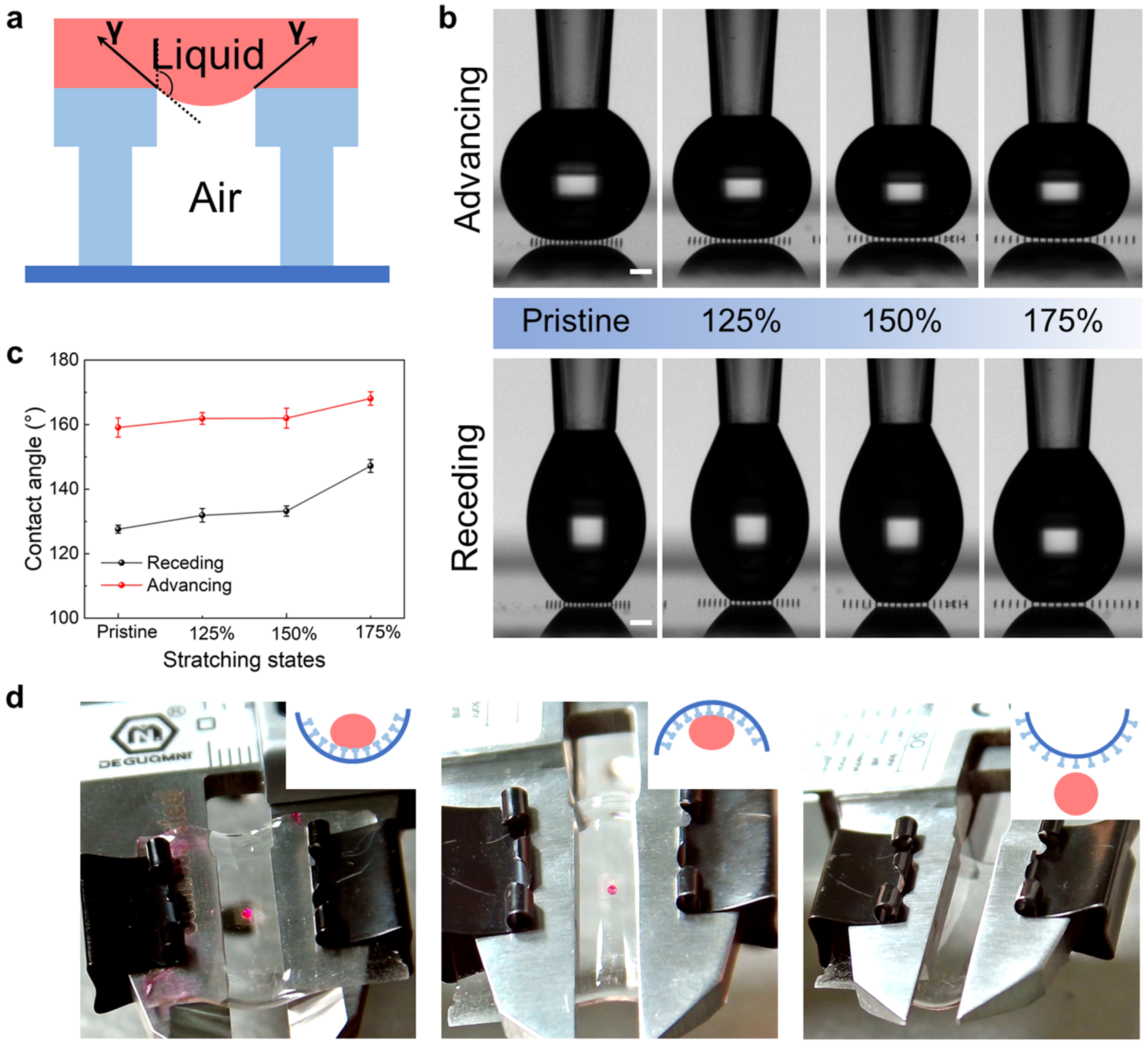
3.5. Wettability Characterizations of the BSAIs
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Baik, S.; Lee, H.J.; Kim, D.W.; Kim, J.W.; Lee, Y.; Pang, C. Bioinspired Adhesive Architectures: From Skin Patch to Integrated Bioelectronics. Adv. Mater. 2019, 31, e1803309. [Google Scholar] [CrossRef]
- Arzt, E.; Quan, H.; McMeeking, R.M.; Hensel, R. Functional surface microstructures inspired by nature—From adhesion and wetting principles to sustainable new devices. Prog. Mater. Sci. 2021, 120, 100823. [Google Scholar] [CrossRef]
- Gao, M.; Wu, H.; Plamthottam, R.; Xie, Z.; Liu, Y.; Hu, J.; Wu, S.; Wu, L.; He, X.; Pei, Q. Skin temperature-triggered, debonding-on-demand sticker for a self-powered mechanosensitive communication system. Matter 2021, 4, 1962–1974. [Google Scholar] [CrossRef]
- Tian, Y.; Guan, P.; Wen, C.; Lu, M.; Li, T.; Fan, L.; Yang, Q.; Guan, Y.; Kang, X.; Jiang, Y.; et al. Strong Biopolymer-Based Nanocomposite Hydrogel Adhesives with Removability and Reusability for Damaged Tissue Closure and Healing. ACS Appl. Mater. Interfaces 2022, 14, 54488–54499. [Google Scholar] [CrossRef] [PubMed]
- Jinkins, K.R.; Li, S.; Arafa, H.; Jeong, H.; Lee, Y.J.; Wu, C.; Campisi, E.; Ni, X.; Cho, D.; Huang, Y.; et al. Thermally switchable, crystallizable oil and silicone composite adhesives for skin-interfaced wearable devices. Sci. Adv. 2022, 8, eabo0537. [Google Scholar] [CrossRef]
- Koivikko, A.; Drotlef, D.-M.; Dayan, C.B.; Sariola, V.; Sitti, M. 3D-Printed Pneumatically Controlled Soft Suction Cups for Gripping Fragile, Small, and Rough Objects. Adv. Intell. Syst. 2021, 3, 2100034. [Google Scholar] [CrossRef]
- Lee, H.J.; Baik, S.; Hwang, G.W.; Song, J.H.; Kim, D.W.; Park, B.Y.; Min, H.; Kim, J.K.; Koh, J.S.; Yang, T.H.; et al. An Electronically Perceptive Bioinspired Soft Wet-Adhesion Actuator with Carbon Nanotube-Based Strain Sensors. ACS Nano 2021, 15, 14137–14148. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, B.; Wang, T.; Feng, X.; Xu, H. A Photochemical Approach toward High-Fidelity Programmable Transfer Printing. Adv. Mater. Technol. 2019, 4, 1900163. [Google Scholar] [CrossRef]
- Wang, C.; Linghu, C.; Nie, S.; Li, C.; Lei, Q.; Tao, X.; Zeng, Y.; Du, Y.; Zhang, S.; Yu, K.; et al. Programmable and scalable transfer printing with high reliability and efficiency for flexible inorganic electronics. Sci. Adv. 2020, 6, eabb2393. [Google Scholar] [CrossRef]
- Bian, J.; Zhou, L.; Wan, X.; Zhu, C.; Yang, B.; Huang, Y. Laser Transfer, Printing, and Assembly Techniques for Flexible Electronics. Adv. Electron. Mater. 2019, 5, 1800900. [Google Scholar] [CrossRef]
- Chen, F.; Bian, J.; Hu, J.; Sun, N.; Yang, B.; Ling, H.; Yu, H.; Wang, K.; Gai, M.; Ma, Y.; et al. Mass transfer techniques for large-scale and high-density microLED arrays. Int. J. Extreme Manuf. 2022, 4, 042005. [Google Scholar] [CrossRef]
- Wang, Y.; Yin, L.; Bai, Y.; Liu, S.; Wang, L.; Zhou, Y.; Hou, C.; Yang, Z.; Wu, H.; Ma, J.; et al. Electrically compensated, tattoo-like electrodes for epidermal electrophysiology at scale. Sci. Adv. 2020, 6, eabd0996. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Wu, Y.; Dong, X.; Armacki, M.; Sitti, M. In situ sensing physiological properties of biological tissues using wireless miniature soft robots. Sci. Adv. 2023, 9, eadg3988. [Google Scholar] [CrossRef]
- Shi, Z.; Tan, D.; Wang, Z.; Xiao, K.; Zhu, B.; Meng, F.; Liu, Q.; Wang, X.; Xue, L. Switchable Adhesion on Curved Surfaces Mimicking the Coordination of Radial-Oriented Spatular Tips and Motion of Gecko Toes. ACS Appl. Mater. Interfaces 2022, 14, 31448–31454. [Google Scholar] [CrossRef] [PubMed]
- Jiang, H.; Hawkes, E.W.; Fuller, C.; Estrada, M.A.; Suresh, S.A.; Abcouwer, N.; Han, A.K.; Wang, S.; Ploch, C.J.; Parness, A.; et al. A robotic device using gecko-inspired adhesives can grasp and manipulate large objects in microgravity. Sci. Robot. 2017, 2, eaan4545. [Google Scholar] [CrossRef] [PubMed]
- Mi, Y.; Niu, Y.; Ni, H.; Zhang, Y.; Wang, L.; Liu, Y.; Ramos, M.A.; Hu, T.S.; Xu, Q. Gecko inspired reversible adhesion via quantum dots enabled photo-detachment. Chem. Eng. J. 2022, 431, 134081. [Google Scholar] [CrossRef]
- Tan, D.; Wang, X.; Liu, Q.; Shi, K.; Yang, B.; Liu, S.; Wu, Z.S.; Xue, L. Switchable Adhesion of Micropillar Adhesive on Rough Surfaces. Small 2019, 15, e1904248. [Google Scholar] [CrossRef]
- Zhang, B.; Jia, L.H.; Jiang, J.R.; Wu, S.S.; Xiang, T.; Zhou, S.B. Biomimetic Microstructured Hydrogels with Thermal-Triggered Switchable Underwater Adhesion and Stable Antiswelling Property. ACS Appl. Mater. Interfaces 2021, 13, 36574–36586. [Google Scholar] [CrossRef]
- Frey, S.T.; Haque, A.B.M.T.; Tutika, R.; Krotz, E.V.; Lee, C.; Haverkamp, C.B.; Markvicka, E.J.; Bartlett, M.D. Octopus-inspired adhesive skins for intelligent and rapidly switchable underwater adhesion. Sci. Adv. 2022, 8, eabq1905. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, D.; Wang, C.; Wu, J.; Xu, X.; Yang, X.; Sun, C.; Jiang, P.; Wang, X. 3D printing of octopi-inspired hydrogel suckers with underwater adaptation for reversible adhesion. Chem. Eng. J. 2023, 457, 141268. [Google Scholar] [CrossRef]
- Narkar, A.R.; Barker, B.; Clisch, M.; Jiang, J.; Lee, B.P. pH Responsive and Oxidation Resistant Wet Adhesive based on Reversible Catechol-Boronate Complexation. Chem. Mater. 2016, 28, 5432–5439. [Google Scholar] [CrossRef] [PubMed]
- Arias, S.; Amini, S.; Horsch, J.; Pretzler, M.; Rompel, A.; Melnyk, I.; Sychev, D.; Fery, A.; Borner, H.G. Toward Artificial Mussel-Glue Proteins: Differentiating Sequence Modules for Adhesion and Switchable Cohesion. Angew. Chem. Int. Ed. 2020, 59, 18495–18499. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Yang, X.; Chen, Y.; Wainwright, D.K.; Kenaley, C.P.; Gong, Z.; Liu, Z.; Liu, H.; Guan, J.; Wang, T.; et al. A biorobotic adhesive disc for underwater hitchhiking inspired by the remora suckerfish. Sci. Robot. 2017, 2, eaan8072. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.H.; Song, H.W.; Kang, B.S.; Kwak, M.K. Remora-Inspired Reversible Adhesive for Underwater Applications. ACS Appl. Mater. Interfaces 2019, 11, 47571–47576. [Google Scholar] [CrossRef]
- Li, Y.; Wang, R.; Jiao, S.; Lai, H.; Liu, Y.; Cheng, Z. Beetle-inspired oil-loaded shape memory micro-arrays with switchable adhesion to both solid and liquid. Chem. Eng. J. 2023, 461, 141927. [Google Scholar] [CrossRef]
- Vogel, M.J.; Steen, P.H. Capillarity-based switchable adhesion. Proc. Natl. Acad. Sci. USA 2010, 107, 3377–3381. [Google Scholar] [CrossRef]
- Xu, Q.; Wu, X.; Wang, Z.; Hu, T.S.; Street, J.; Luo, Y.; Xia, Z. Temperature-induced tunable adhesion of gecko setae/spatulae and their biomimics. Mater. Today Proc. 2018, 5, 25879–25893. [Google Scholar] [CrossRef]
- Booth, J.A.; Tinnemann, V.; Hensel, R.; Arzt, E.; McMeeking, R.M.; Foster, K.L. Statistical properties of defect-dependent detachment strength in bioinspired dry adhesives. J. R. Soc. Interface 2019, 16, 20190239. [Google Scholar] [CrossRef]
- Arzt, E. Biological and artificial attachment devices: Lessons for materials scientists from flies and geckos. Mater. Sci. Eng. C 2006, 26, 1245–1250. [Google Scholar] [CrossRef]
- Gao, H.; Wang, X.; Yao, H.; Gorb, S.; Arzt, E. Mechanics of hierarchical adhesion structures of geckos. Mech. Mater. 2005, 37, 275–285. [Google Scholar] [CrossRef]
- Persson, B.N.J. On the mechanism of adhesion in biological systems. J. Chem. Phys. 2003, 118, 7614–7621. [Google Scholar] [CrossRef]
- del Campo, A.; Greiner, C.; Arzt, E. Contact Shape Controls Adhesion of Bioinspired Fibrillar Surfaces. Langmuir 2007, 23, 10235–10243. [Google Scholar] [CrossRef] [PubMed]
- Dayan, C.B.; Chun, S.; Krishna-Subbaiah, N.; Drotlef, D.M.; Akolpoglu, M.B.; Sitti, M. 3D Printing of Elastomeric Bioinspired Complex Adhesive Microstructures. Adv. Mater. 2021, 33, 2103826. [Google Scholar] [CrossRef] [PubMed]
- Tian, H.M.; Liu, H.R.; Shao, J.Y.; Li, S.; Li, X.M.; Chen, X.M. An electrically active gecko-effect soft gripper under a low voltage by mimicking gecko’s adhesive structures and toe muscles. Soft Matter 2020, 16, 5599–5608. [Google Scholar] [CrossRef]
- Reddy, S.; Arzt, E.; del Campo, A. Bioinspired Surfaces with Switchable Adhesion. Adv. Mater. 2007, 19, 3833–3837. [Google Scholar] [CrossRef]
- Peng, B.; Wang, Q.-A.; Feng, X.-Q.; Li, Q. Switchable adhesion with a high tuning ratio achieved on polymer surfaces with embedded low-melting-point alloy. Extreme Mech. Lett. 2021, 49, 101488. [Google Scholar] [CrossRef]
- Frensemeier, M.; Kaiser, J.S.; Frick, C.P.; Schneider, A.S.; Arzt, E.; Fertig, R.S., III; Kroner, E. Temperature-Induced Switchable Adhesion using Nickel–Titanium–Polydimethylsiloxane Hybrid Surfaces. Adv. Funct. Mater. 2015, 25, 3013–3021. [Google Scholar] [CrossRef]
- Clydesdale, G.J.; Dandie, G.W.; Muller, H.K. Ultraviolet light induced injury: Immunological and inflammatory effects. Immunol. Cell Biol. 2001, 79, 547–568. [Google Scholar] [CrossRef]
- Zhao, J.; Li, X.; Tan, Y.; Liu, X.; Lu, T.; Shi, M. Smart Adhesives via Magnetic Actuation. Adv. Mater. 2022, 34, e2107748. [Google Scholar] [CrossRef]
- Sitti, M.; Wiersma, D.S. Pros and Cons: Magnetic versus Optical Microrobots. Adv. Mater. 2020, 32, 1906766. [Google Scholar] [CrossRef]
- Hong, C.; Ren, Z.; Wang, C.; Li, M.; Wu, Y.; Tang, D.; Hu, W.; Sitti, M. Magnetically actuated gearbox for the wireless control of millimeter-scale robots. Sci. Robot. 2022, 7, eabo4401. [Google Scholar] [CrossRef] [PubMed]
- Sitti, M. Mobile Microrobotics; MIT Press: Cambridge, MA, USA, 2017. [Google Scholar]
- Wang, Y.; Zhang, X.; Hensel, R.; Arzt, E. Sliding Mechanism for Release of Superlight Objects from Micropatterned Adhesives. Adv. Mater. Interfaces 2022, 9, 2101764. [Google Scholar] [CrossRef]
- Pang, C.; Kim, J.-K.; Wu, Y.; Wang, M.Y.; Yu, H.; Sitti, M. Bioinspired Microstructured Adhesives with Facile and Fast Switchability for Part Manipulation in Dry and Wet Conditions. Adv. Funct. Mater. 2023, 2303116. [Google Scholar] [CrossRef]
- Barnefske, L.; Rundel, F.; Moh, K.; Hensel, R.; Zhang, X.; Arzt, E. Tuning the Release Force of Microfibrillar Adhesives by Geometric Design. Adv. Mater. Interfaces 2022, 9, 2201232. [Google Scholar] [CrossRef]
- Yu, Z.; Shi, Y.; Xie, J.; Yang, S.X.; Dai, Z. Design and analysis of a bionic adhesive foot for gecko robot climbing the ceiling. Int. J. Robot. Autom. 2018, 33, 445–454. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, S.; Li, B.; Yu, B.; Lee, H.; Cai, M.; Gorb, S.N.; Zhou, F.; Liu, W. Gecko’s Feet-Inspired Self-Peeling Switchable Dry/Wet Adhesive. Chem. Mater. 2021, 33, 2785–2795. [Google Scholar] [CrossRef]
- Wang, Y.Z.; Lai, H.; Cheng, Z.J.; Zhang, H.Y.; Zhang, E.S.; Lv, T.; Liu, Y.Y.; Jiang, L. Gecko toe pads inspired in situ switchable superhydrophobic shape memory adhesive film. Nanoscale 2019, 11, 8984–8993. [Google Scholar] [CrossRef]
- Liimatainen, V.; Drotlef, D.M.; Son, D.; Sitti, M. Liquid-Superrepellent Bioinspired Fibrillar Adhesives. Adv. Mater. 2020, 32, e2000497. [Google Scholar] [CrossRef] [PubMed]
- Kawata, S.; Sun, H.-B.; Tanaka, T.; Takada, K. Finer features for functional microdevices. Nature 2001, 412, 697–698. [Google Scholar] [CrossRef]
- Pagliano, S.; Marschner, D.E.; Maillard, D.; Ehrmann, N.; Stemme, G.; Braun, S.; Villanueva, L.G.; Niklaus, F. Micro 3D printing of a functional MEMS accelerometer. Microsyst. Nanoeng. 2022, 8, 105. [Google Scholar] [CrossRef]
- Spratte, T.; Geiger, S.; Colombo, F.; Mishra, A.; Taale, M.; Hsu, L.-Y.; Blasco, E.; Selhuber-Unkel, C. Increasing the Efficiency of Thermoresponsive Actuation at the Microscale by Direct Laser Writing of pNIPAM. Adv. Mater. Technol. 2023, 8, 2200714. [Google Scholar] [CrossRef]
- Ma, Z.-C.; Zhang, Y.-L.; Han, B.; Hu, X.-Y.; Li, C.-H.; Chen, Q.-D.; Sun, H.-B. Femtosecond laser programmed artificial musculoskeletal systems. Nat. Commun. 2020, 11, 4536. [Google Scholar] [CrossRef]
- Bunea, A.-I.; del Castillo Iniesta, N.; Droumpali, A.; Wetzel, A.E.; Engay, E.; Taboryski, R. Micro 3D Printing by Two-Photon Polymerization: Configurations and Parameters for the Nanoscribe System. Micro 2021, 1, 164–180. [Google Scholar] [CrossRef]
- IP-PDMS Photoresin, Nanoscribe GmbH & Co. KG. Available online: https://support.nanoscribe.com/hc/en-gb/articles/360022218600-IP-PDMS (accessed on 1 September 2023).
- Wang, Z.; Volinsky, A.A.; Gallant, N.D. Crosslinking effect on polydimethylsiloxane elastic modulus measured by custom-built compression instrument. J. Appl. Polym. Sci. 2014, 131, 41050. [Google Scholar] [CrossRef]
- Venzac, B.; Deng, S.; Mahmoud, Z.; Lenferink, A.; Costa, A.; Bray, F.; Otto, C.; Rolando, C.; Le Gac, S. PDMS Curing Inhibition on 3D-Printed Molds: Why? Also, How to Avoid It? Anal. Chem. 2021, 93, 7180–7187. [Google Scholar] [CrossRef]
- Wang, H.; Wang, H.; Zhang, W.; Yang, J.K.W. Toward Near-Perfect Diffractive Optical Elements via Nanoscale 3D Printing. ACS Nano 2020, 14, 10452–10461. [Google Scholar] [CrossRef]
- Liu, X.; Gu, H.; Ding, H.; Du, X.; He, Z.; Sun, L.; Liao, J.; Xiao, P.; Gu, Z. Programmable Liquid Adhesion on Bio-Inspired Re-Entrant Structures. Small 2019, 15, 1902360. [Google Scholar] [CrossRef]
- Zhang, C.; Li, Z.; Li, H.; Yang, Q.; Wang, H.; Shan, C.; Zhang, J.; Hou, X.; Chen, F. Femtosecond Laser-Induced Supermetalphobicity for Design and Fabrication of Flexible Tactile Electronic Skin Sensor. ACS Appl. Mater. Interfaces 2022, 14, 38328–38338. [Google Scholar] [CrossRef]
- Purtov, J.; Frensemeier, M.; Kroner, E. Switchable Adhesion in Vacuum Using Bio-Inspired Dry Adhesives. ACS Appl. Mater. Interfaces 2015, 7, 24127–24135. [Google Scholar] [CrossRef]
- Isla, P.Y.; Kroner, E. A Novel Bioinspired Switchable Adhesive with Three Distinct Adhesive States. Adv. Funct. Mater. 2015, 25, 2444–2450. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, G.; Zhang, H.; Duan, Y.; Yin, Z.; Huang, Y. High-Resolution, Flexible, and Full-Color Perovskite Image Photodetector via Electrohydrodynamic Printing of Ionic-Liquid-Based Ink. Adv. Funct. Mater. 2021, 31, 2100857. [Google Scholar] [CrossRef]
- Liu, X.; Gu, H.; Wang, M.; Du, X.; Gao, B.; Elbaz, A.; Sun, L.; Liao, J.; Xiao, P.; Gu, Z. 3D Printing of Bioinspired Liquid Superrepellent Structures. Adv. Mater. 2018, 30, e1800103. [Google Scholar] [CrossRef] [PubMed]
- Koishi, T.; Yasuoka, K.; Fujikawa, S.; Ebisuzaki, T.; Zeng, X.C. Coexistence and transition between Cassie and Wenzel state on pillared hydrophobic surface. Proc. Natl. Acad. Sci. USA 2009, 106, 8435–8440. [Google Scholar] [CrossRef] [PubMed]
- Cassie, A.B.D.; Baxter, S. Wettability of porous surfaces. Trans. Faraday Soc. 1944, 40, 546–551. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Z.; Wang, Z.; Liang, Y.; Cui, Z.; Zhao, J.; Li, X.; Ren, L. Multistimuli-Responsive Microstructured Superamphiphobic Surfaces with Large-Range, Reversible Switchable Wettability for Oil. ACS Appl. Mater. Interfaces 2019, 11, 28478–28486. [Google Scholar] [CrossRef]
- Yong, J.; Yang, Q.; Hou, X.; Chen, F. Nature-Inspired Superwettability Achieved by Femtosecond Lasers. Ultrafast Sci. 2022, 2022, 9895418. [Google Scholar] [CrossRef]
- Öner, D.; McCarthy, T.J. Ultrahydrophobic Surfaces. Effects of Topography Length Scales on Wettability. Langmuir 2000, 16, 7777–7782. [Google Scholar] [CrossRef]
- Li, C.; Jiao, Y.; Zhang, Y.; Jiang, S.; Lv, X.; Wu, S.; Li, J.; Hu, Y.; Ye, J.; Liu, K.; et al. Noncontact All-In-Situ Reversible Reconfiguration of Femtosecond Laser-Induced Shape Memory Magnetic Microcones for Multifunctional Liquid Droplet Manipulation and Information Encryption. Adv. Funct. Mater. 2021, 31, 2100543. [Google Scholar] [CrossRef]
- Bai, X.; Yong, J.; Shan, C.; Fang, Y.; Hou, X.; Chen, F. Remote, selective, and in situ manipulation of liquid droplets on a femtosecond laser-structured superhydrophobic shape-memory polymer by near-infrared light. Sci. China Chem. 2021, 64, 861–872. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; He, B.; Han, Q.; He, R.; Ding, Y.; Han, B.; Ma, Z.-C. Femtosecond Laser Direct Writing of Gecko-Inspired Switchable Adhesion Interfaces on a Flexible Substrate. Micromachines 2023, 14, 1742. https://doi.org/10.3390/mi14091742
Zhang Z, He B, Han Q, He R, Ding Y, Han B, Ma Z-C. Femtosecond Laser Direct Writing of Gecko-Inspired Switchable Adhesion Interfaces on a Flexible Substrate. Micromachines. 2023; 14(9):1742. https://doi.org/10.3390/mi14091742
Chicago/Turabian StyleZhang, Zhiang, Bingze He, Qingqing Han, Ruokun He, Yuxuan Ding, Bing Han, and Zhuo-Chen Ma. 2023. "Femtosecond Laser Direct Writing of Gecko-Inspired Switchable Adhesion Interfaces on a Flexible Substrate" Micromachines 14, no. 9: 1742. https://doi.org/10.3390/mi14091742
APA StyleZhang, Z., He, B., Han, Q., He, R., Ding, Y., Han, B., & Ma, Z.-C. (2023). Femtosecond Laser Direct Writing of Gecko-Inspired Switchable Adhesion Interfaces on a Flexible Substrate. Micromachines, 14(9), 1742. https://doi.org/10.3390/mi14091742