1. Introduction
With the development of global navigation satellite systems (GNSS), they have become crucial infrastructures for spatiotemporal information systems, meeting the outdoor, wide-ranging, all-weather, and real-time high-precision navigation and positioning needs. However, satellite navigation signals are vulnerable, easily affected by obstructions such as buildings and dense vegetation, and often become ineffective indoors or in underground spaces [
1,
2]. To address this issue, various indoor positioning technologies based on radiofrequency stations, such as pseudo-satellites, ultra-wideband (UWB), and Bluetooth have been researched internationally [
3,
4,
5]. Meanwhile, pedestrian navigation systems based on Micro-Electro-Mechanical System Inertial Measurement Units (MEMS-IMU), which do not rely on any external information, have gained widespread attention in the field of indoor positioning [
6].
In recent years, scholars both domestically and internationally have conducted in-depth research on pedestrian navigation, focusing on foot-mounted, waist-mounted, and other distributed Inertial Measurement Unit (IMU) systems. Significant progress has been made in zero-velocity phase detection, human gait analysis, and compensation for inertial sensor errors. To enhance the accuracy of zero-velocity detection in mixed-motion modes, Yujie Sun [
7], Mingkun Yang [
8], and Seong Yun Cho [
9] have proposed innovative zero-velocity interval (ZVI) detectors. To accommodate various motion patterns, Ni Zhu [
10] proposed a machine learning model for detecting zero-velocity moments without any pre-classification step, named the Uniform AI Model for All pedestrian Motions (UMAM). Pedestrian gait detection helps improve the accuracy of foot-mounted pedestrian autonomous navigation. Zhihong Deng [
11,
12] has categorized common gaits into seven types and built a Bidirectional Long Short-Term Memory Recurrent Neural Network (BLSTM-RNN) as a gait classifier. By combining the Zero-Integration Heading Rate (ZIHR) method with a simplified Heuristic Drift Reduction (HDR) method, it reduces heading drift. Some scholars have also studied pedestrian gait detection and positioning with sensors installed at the waist and wrist. Nasim Hajati et al. [
13] used an Inertial Measurement Unit (IMU) mounted on a belt, estimating the attitude through an unscented Kalman filter and ultimately calculating the position in three dimensions with the help of a step detection algorithm. Debjyoti Chowdhury et al. [
14] developed a wearable device that can be fixed on the wrist, employing a simplified algorithm for human activity detection.
To enhance the robustness of the pedestrian autonomous navigation and localization system, Hongyu Zhao et al. [
15] employed a threshold-based strategy to validate the detected zero-velocity update (ZUPT) periods. They proposed a quantitative metric for estimating the smoothness of the position data, with the advantage of achieving continuous error correction throughout the entire gait cycle. However, a limitation is its lack of adaptation to other walking speeds. Qiuying Wang et al. [
16] introduced a rapid initial alignment algorithm for foot inertial/magnetic pedestrian localization based on an Adaptive Gradient Descent Algorithm (AGDA). This method considers the characteristics of gravity and the Earth’s magnetic field, measured by accelerometers and magnetometers when the pedestrian is stationary. Its advantage lies in the introduction of AGDA for quick initial alignment, but it must consider the impact of magnetic disturbances. Weixing Qian et al. [
17] proposed a novel pedestrian navigation method that constructs an Adaptive Virtual Inertial Measurement Unit (VIMU) based on gait type classification. The advantage is the use of these models to address the problem of position estimation when the actual foot IMU is out of range. However, further improvement in accuracy is needed. Miaoxin Ji et al. [
18] introduced a Zero-Velocity Update with Zero Position Difference (ZUPT-ZPD) combining foot and tibia kinematic information. To obtain accurate posture and position through the fusion of foot and tibia measurement information, they proposed an Improved Extended Kalman Particle Filter (EKPF) based on zero position difference to enhance localization accuracy. However, 3D pedestrian localization is not achieved. Tao Liu et al. [
19] designed a personnel positioning system comprising a foot inertial module, a smartphone, and pre-deployed sparse QR code points. The system utilizes a newly developed data fusion algorithm for real-time and post-processing fusion of relative foot position and 3D QR code control point coordinate data. However, it requires pre-placement of QR code points. Wenchao Zhang et al. [
20] proposed three improved constraint algorithms for detecting static stages, heading drift constraints, and height divergence constraints, respectively. Nevertheless, high-speed walking modes were not considered. Dongpeng Xie [
21], based on a foot-carried pedestrian navigation system, employed an Error State Extended Kalman Filter (EKF) framework that integrates the GNSS position, zero-velocity state, barometric height, and other information. Its advantage lies in providing technical references for accurately and continuously obtaining common pedestrian position information. However, GNSS assistance is required. F. Seco et al. [
22] estimated terrain slope and height changes during forward walking using IMU. The advantage is in checking whether the ramp is associated with existing ramps in the database, but it is not applicable to staircase scenarios.
Simultaneously, in the aforementioned studies, it was observed that pedestrian navigation systems based on foot-mounted inertial sensors have the drawback of decreasing position accuracy over long durations and distances due to error accumulation. Scholars both domestically and internationally have explored the use of pedestrian navigation systems based on dual inertial units to address this issue. Peter Händel et al. [
23,
24] proposed a method that fuses information from two navigation systems. The advantage lies in coupling two foot systems using the maximum separation distance constraint between the two systems, thereby improving the positioning performance. However, it is limited to the horizontal position correction. Prateek et al. [
25] introduced a pedestrian navigation system based on the fusion of dual inertial systems. The advantage is in utilizing the maximum distance between the feet during normal walking to constrain the dual-system positioning results, achieving favorable outcomes, especially when the initial heading estimate is known. The team led by Xiaoji Niu at Wuhan University [
26] discovered a reliable periodic equality constraint in pedestrian motion patterns. The advantage is an enhancement in the horizontal positioning performance of the dual-foot system. Exploiting the regularity in pedestrian bipedal motion, Wei Shi et al. [
27], based on human kinematics, constructed an ellipsoid constraint model using the maximum stride length and foot lift height during walking. This approach improved pedestrian position estimation accuracy, although experiments across multiple walking speeds were not conducted. Ming Cheng et al. [
28] proposed an improved method for dual-foot inertial/magnetometer pedestrian positioning based on adaptive inequality-constrained Kalman filtering. The advantage is the introduction of adaptive inequality constraints in the ZUPT Kalman filtering, reducing cumulative position errors, although the computational unit used has a larger volume. Sen Qiu et al. [
29] established a low-cost body sensor network, leveraging a multi-sensor data fusion algorithm for gait analysis. The advantage is in using multiple sensors to achieve gait analysis, but the sensor quantity exceeds five. Renjie Wu et al. [
30] addressed dual-foot inertial navigation systems (DF-INS) and proposed a Dual Trajectory Fusion (DTF) method. The advantage lies in merging left and right foot trajectories into a single center-of-mass trajectory using ZUPT clustering and fusion weight calculation. Shao Chen et al. [
31] designed a dual MIMU single-board pedestrian inertial navigation system (PINS) and introduced a novel constraint method. The advantage is the formation of a constant three-dimensional (3D) position difference constraint based on the layout of two sensors on the circuit board, although other walking speeds were not considered. Min Su Lee et al. [
32] developed an advanced human positioning algorithm using multiple wearable inertial sensors. The advantage is continuous fusion of position and velocity from a foot-based inertial measurement (PDR) system, leveraging known motion relationships between different body parts. However, a relatively large number of sensors were used.
Meanwhile, there are also some other correction methods for pedestrian positioning results based on inertial sensors. One common approach is to use indoor radio positioning base station information to correct the results of pedestrian inertial positioning. For instance, a combination of inertial sensors and UWB navigation methods can be employed, utilizing UWB ranging information to correct the inertial positioning results. The advantage of these methods is the ability to achieve higher precision in positioning results. However, a limitation is that it requires the pre-deployment of radio base stations.
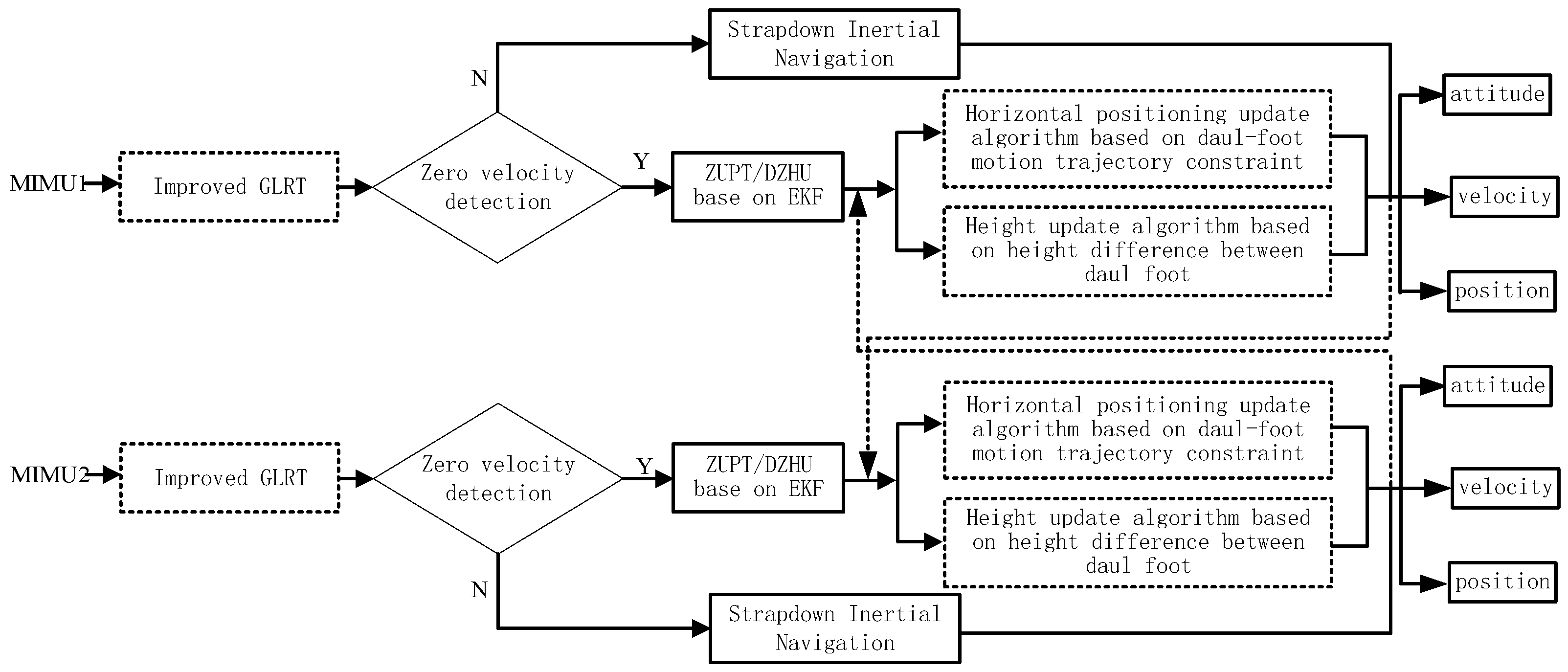
In summary, in complex motion scenarios such as walking, running, ascending, and descending stairs, the pedestrian zero-velocity phase still cannot adaptively and accurately discriminate. The current pedestrian positioning method based on dual foot-mounted IMU has not defined the essence of dual-foot distance constraints. Addressing the above issues, this paper, based on the foot-mounted pedestrian navigation system and considering the application scenario of indoor navigation through extensive experimental analyses, makes contributions primarily in the following three aspects:
Firstly, an improved zero-velocity phase determination method based on generalized likelihood estimation is employed. This involves constructing a probability density function for inertial sensor data, adaptively adjusting the zero-velocity phase detection threshold based on the motion state and achieving a complete dual-foot zero-velocity updating and zero-height updating process.
Secondly, a horizontal position update algorithm based on dual-foot motion trajectory constraints is designed. In terms of horizontal localization, a method is proposed that uses the distance between the trajectory of one foot to the other foot as a constraint. The inequality Kalman filter method is utilized to correct the dual-system position.
Thirdly, in altitude localization, the height of the staircase between the dual feet is employed as observation data to further refine the altitude position results.
This paper is organized as follows:
Section 2 analyzes the dual-foot gait characteristics and introduces the basic technical principles and mathematical models.
Section 3 presents the dual-foot zero-velocity interval detection method.
Section 4 designs the 3D pedestrian positioning scheme based on the dual foot-mounted IMU.
Section 5 validates the effectiveness of the method by experimentally comparing the position accuracy before and after correction.
Section 6 concludes the paper.
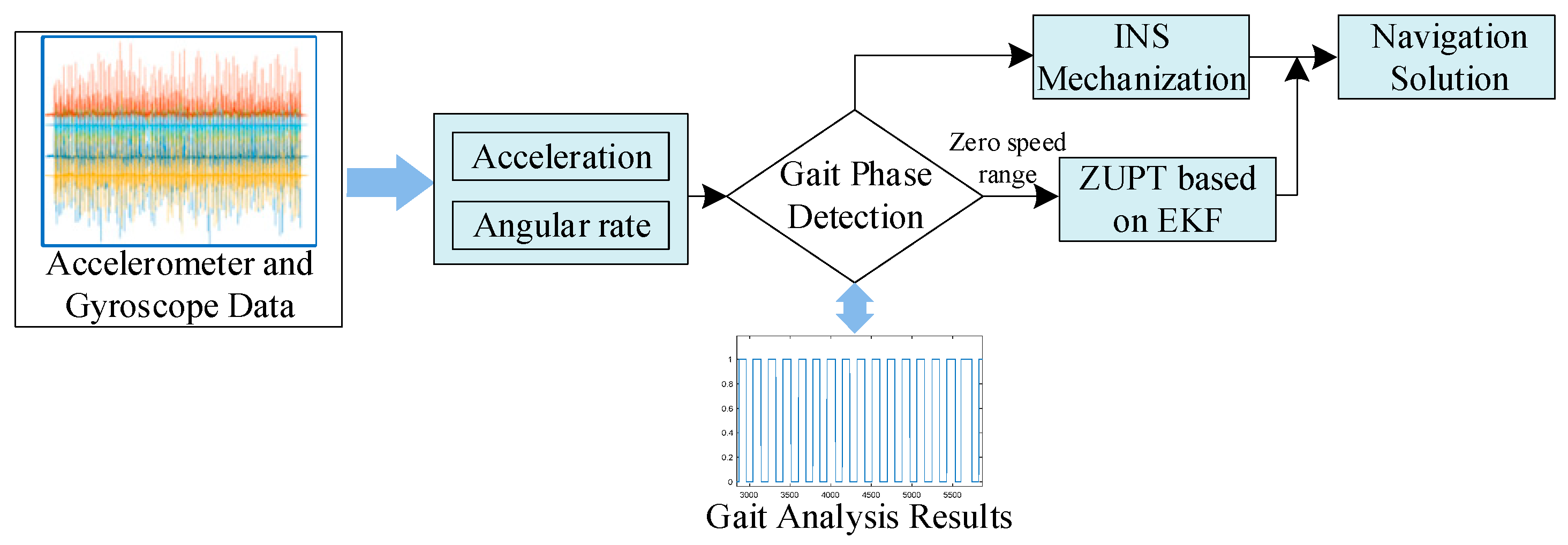
3. Improved Adaptive Zero-Velocity Phase Detection
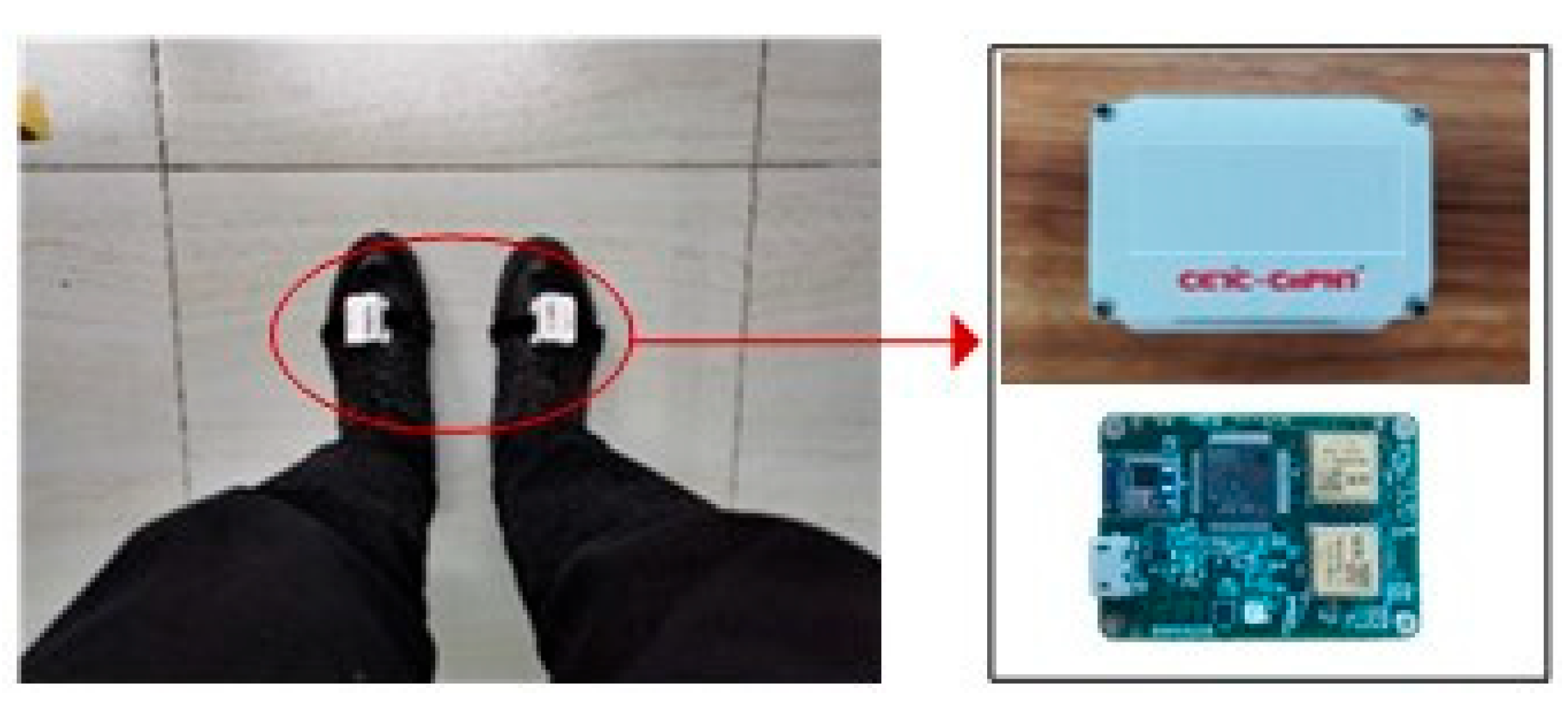
The information acquisition module worn by the pedestrian’s left and right feet is mainly a six-degree-of-freedom inertial sensing unit composed of a three-axis gyroscope and a three-axis accelerometer, and its output model
is constructed to be denoted as
where
is the matrix form of the acceleration ratio information at
moments and
is the matrix form of the angular velocity information at
moments. The main process of zero-velocity phase detection is to set
observations between
and
as time traversal phases to determine whether the foot-strapped sensor is moving or stationary under the condition that the original data sequence
is known. And the probability of the sensor remaining stationary is determined under the sensor non-stationary condition, while the probability of False Alarm is set to a very small value so that the probability of detecting it as a stationary event is maximized.
A mathematical model construction method is used to transform the detection of the zero-velocity phase into a binary hypothesis testing process by first setting up a detector chosen between hypothesis
and hypothesis
, where
denotes the non-zero-velocity phase of the MEMS-IMU and
denotes the zero-velocity phase of the MEMS-IMU. The accuracy of the detector depends on the magnitude of the probability value of false alarms, which arise from the probability value
of judging that
holds when hypothesis
is true, and the probability value
of judging accurately when hypothesis
holds. The goal of judging two hypotheses at a given
by the Neyman–Pearson theorem is to maximize the value of
. Set
and
to represent the probability density functions of the two hypothesized observations,
is known and the conditions for judging
to be true in order to maximize the value of
are
The threshold
in the above equation can be determined by the following equation:
where the function
is the likelihood ratio of traversing
, that is, the likelihood of hypothesis
with respect to hypothesis
. Combined with the given mathematical model of the sensor, the generalized likelihood estimation decision condition is calculated by simplification as
In this equation, the threshold for judgment is defined as
, where
represents the mean of acceleration divided by force output within the sliding window [
41].
and
, respectively, denote the noise variance values for the accelerometer and gyroscope, while
stands for the current value of the sliding window.
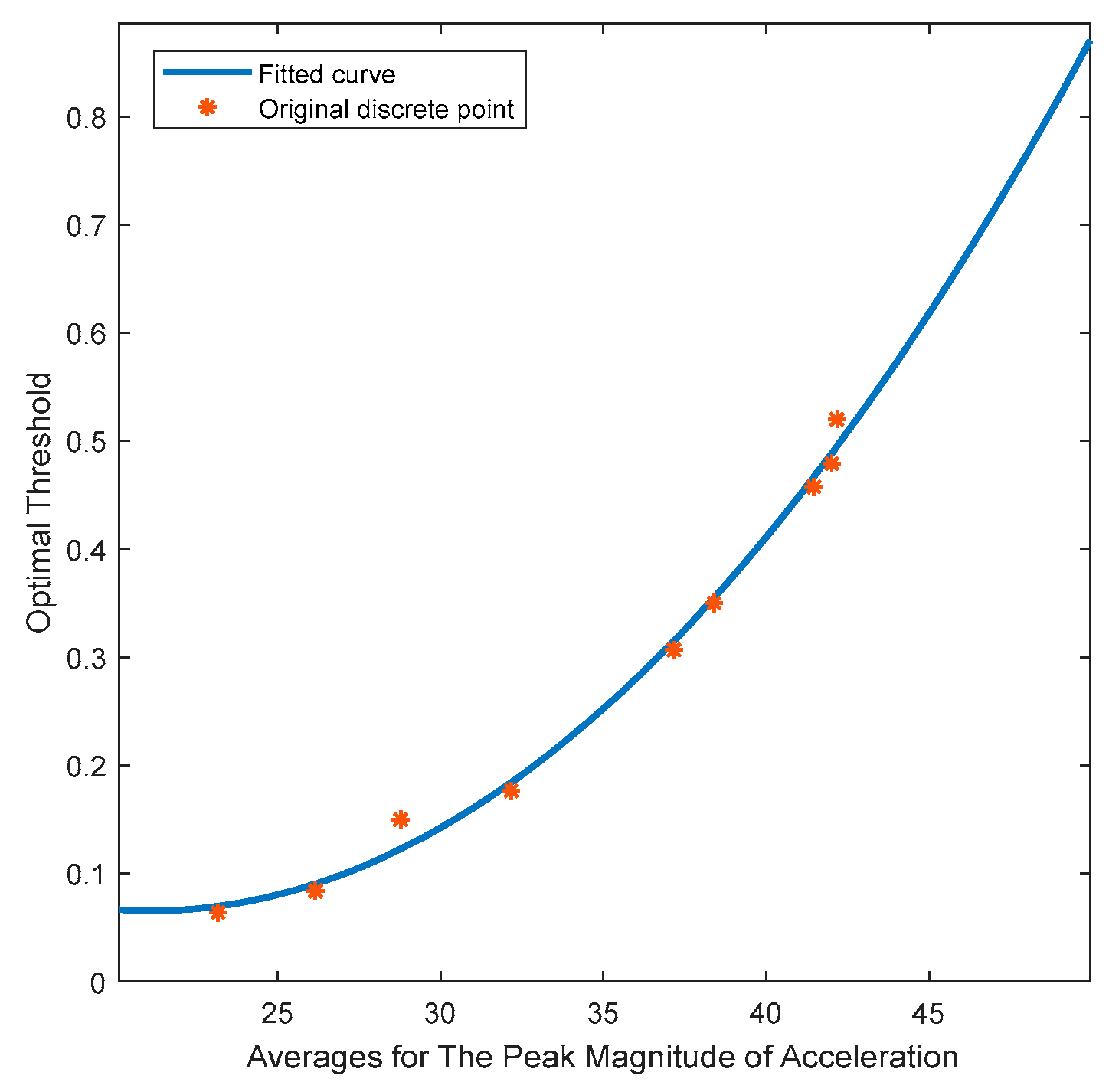
This article introduces an enhanced threshold-adaptive zero-velocity interval detection algorithm which dynamically adjusts the judgment threshold in real-time by identifying different motion states. The primary challenge in adaptive threshold adjustment is how to recognize distinct motion states. In general, when a person is moving quickly, the peak magnitude of foot acceleration is noticeably greater than during slow movement, indicating higher fluctuations in inertial measurement data. These variations can be expressed through a series of mathematical features. Therefore, in motion state classification, real-time inertial measurement data are collected during motion. The average peak magnitude of acceleration within a 0.1-s sliding window (since the duration of foot contact during walking is relatively short, the window length should not be overly extended) is calculated. The current motion state is determined by analyzing this value.
After determining the motion state, the next challenge is how to select different zero-velocity interval detection thresholds for each motion state. Pedestrian motion, including normal walking, brisk walking, slow jogging, and fast running, is categorized into eight different speed levels. For each speed level, a total of 20 threshold calibration experiments are conducted. In these experiments, participants maintain a constant speed according to a predefined reference path. The goal is to find the detection threshold that minimizes trajectory error. This process is repeated 20 times for each speed level, resulting in statistical averages for the peak magnitude of acceleration (denoted as
) and the optimal detection threshold (denoted as
), as shown in
Table 1.
Using polynomial fitting based on the data in the table, we can estimate the function relationship between the optimal detection threshold and the average peak magnitude of acceleration, as shown in
Figure 3. The constructed function model is as follows:
4. Pedestrian Autonomous 3D Positioning Algorithm Based on Dual-Foot Motion Characteristic Constraints
4.1. Analysis of Characteristics in Pedestrian Dual-Foot Motion Trajectories
Based on the analysis of dual-foot gait characteristics in
Section 2.1, during various gait patterns in pedestrian locomotion, the left and right feet move alternately, with the distance between their trajectories staying within a certain range. In normal circumstances they do not intersect. From this pattern, we can deduce that in pedestrian bipedal navigation, the vertical distance between the right foot position and the left foot trajectory at any given moment remains within a maximum threshold, forming a constraint condition. This approach, distinct from constraints based on maximum step lengths or ellipsoidal constraints, is better suited for dynamic motions that involve significant variations in maximum step lengths, such as taking large strides or making turns.
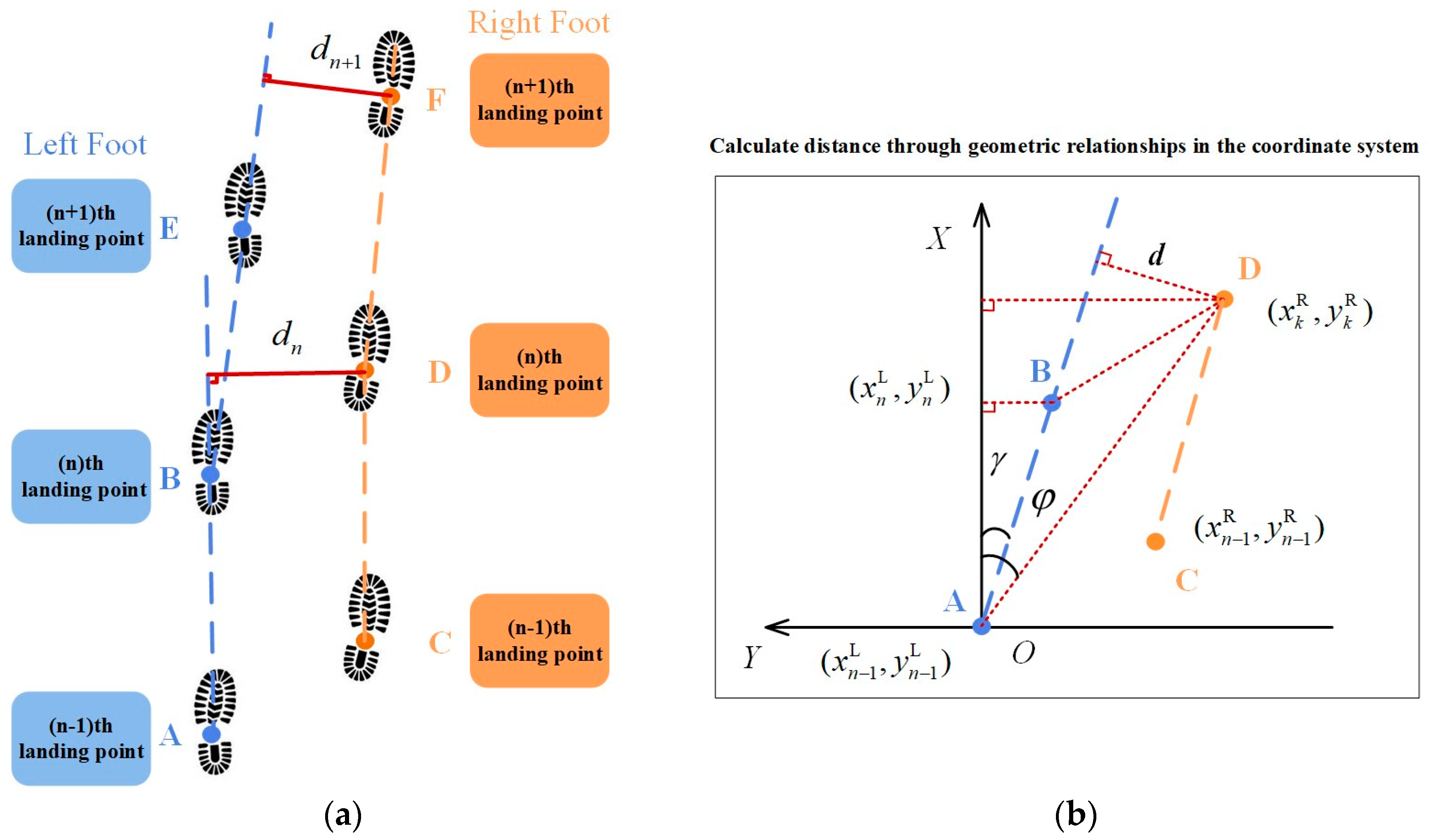
In
Figure 4a, a schematic representation of pedestrian dual-foot trajectories is presented. The dashed lines depict the projection of the trajectories onto the horizontal plane, and the black dots represent the landing points for the left and right feet. The solid lines connecting them provide an approximate representation of the movement trajectories between the two feet. To further analyze a stepping phase, the solid line connecting points A and B represents the trajectory of the left foot. Point A corresponds to the (n − 1)th landing point of the left foot, and point B represents the nth landing point of the left foot. Point C designates the (n − 1)th landing point of the right foot. During the phase when the left foot remains stationary and the right foot moves from its (n − 1)th to nth landing point (point D), the horizontal plane projection distance between the right foot and the AB trajectory is labeled as
, representing the vertical separation between the right foot’s position and the left foot’s trajectory at that specific moment, as illustrated in
Figure 4b. In normal walking,
does not exceed a predetermined threshold denoted as
. Based on these motion characteristics, a secondary correction is applied from the horizontal direction to enhance the accuracy of the localization results.
The horizontal coordinates of the left and right feet at the (n − 1)th and nth landing points are defined as follows: The horizontal coordinate of point A is denoted as
, the horizontal coordinate of point B is denoted as
, and the horizontal coordinate of point C is denoted as
. The horizontal coordinate of the right foot at the
th moment is represented by point D, with its horizontal coordinate being
.
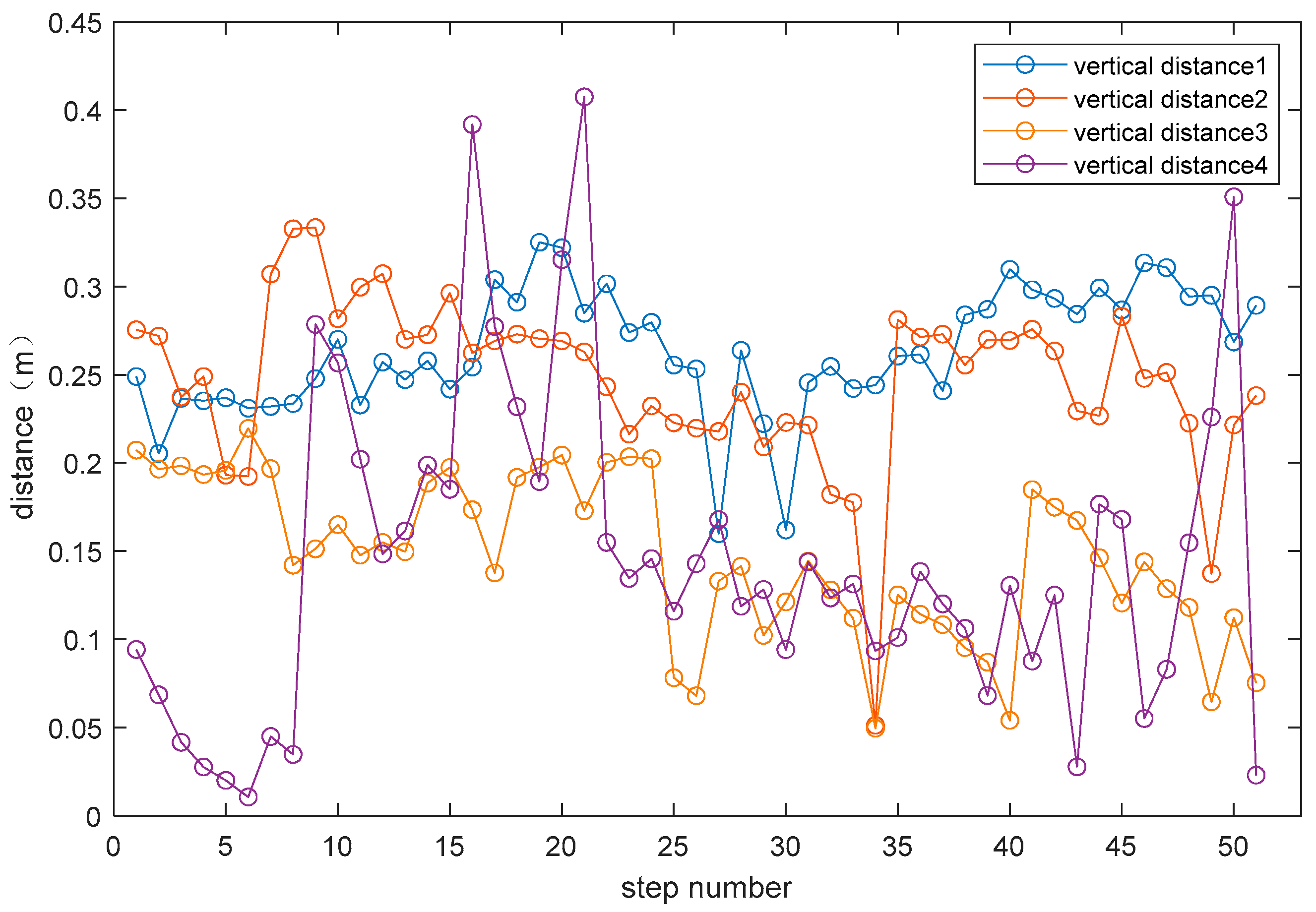
We utilized optical motion capture equipment to record the dual-foot motion trajectories of pedestrians and perform statistical analyses on the distance data between the right foot and left foot trajectories. This experiment was conducted using the Realis Optical Motion Capture System. Participants in the experiment attached optical markers (Markers) to the same location on the dorsum of both feet. Multiple motion capture cameras, positioned at various angles, continuously tracked these Marker points in real-time and transmitted their spatial coordinate data to a data processing workstation. We calculated the vertical distance between the right foot position during the standing phase of experimental subjects and the trajectory of the left foot at different moments, forming four groups of distance sequences. The curve graph is shown in
Figure 5.
From
Figure 5, it can be observed that the distance varied during pedestrian dual-foot motion, but it remained within a certain range. The maximum value did not exceed 0.407 m, and the minimum value did not fall below 0.011 m. The patterns of the distance sequences obtained from different experimental participants are similar; therefore, this maximum distance value can be used to establish an inequality constraint.
4.2. Horizontal Position Update Algorithm Based on Dual-Foot Motion Trajectory Constraints
In a pedestrian dual-foot navigation system, as analyzed in the preceding text, there is constraint information regarding the distance between bipedal trajectories. This relationship can be expressed using inequalities, and subsequently, the Kalman filter is constrained. By doing so, the optimal solution can be calculated, and the states estimated using this method better match the actual positioning results. The algorithm makes two main assumptions for its modeling. Firstly, it assumes that the inertial sensors worn on the feet are securely fixed and do not experience lateral displacement. Secondly, it assumes that the pedestrian’s movements include only conventional walking, slow running, fast running, jumping, and stair climbing modes. During these activities, the algorithm assumes that the pedestrian cannot subjectively control the placement of the feet and adheres to normal human activity patterns.
For two navigation systems, the true state of the
th navigation system at time k is represented by
(including attitude, position, and velocity), and the estimated state is represented as
, where
and
are included. We define the joint state vector as follows:
In the equation, , , .
When pedestrians move on the same floor, at time
, the vertical distance between the time trajectories of the right foot and left foot front and back positions, calculated as
, can be described in relation to a threshold:
In the equation, , .
The problem can be solved by the local minimum point of quadratic programming and the maximum likelihood method, as shown by (23). The state vector for navigation estimation is constrained within a reasonable subspace, calculating a state estimation vector with higher precision that fulfills the inequality constraint:
In the equation, denotes the estimated results of unconstrained Kalman filter state variables; stands for the unconstrained Kalman filter covariance matrix; and signifies the estimated results of constrained Kalman filter state variables.
4.3. Height Update Algorithm Based on the Height Difference between Both Feet
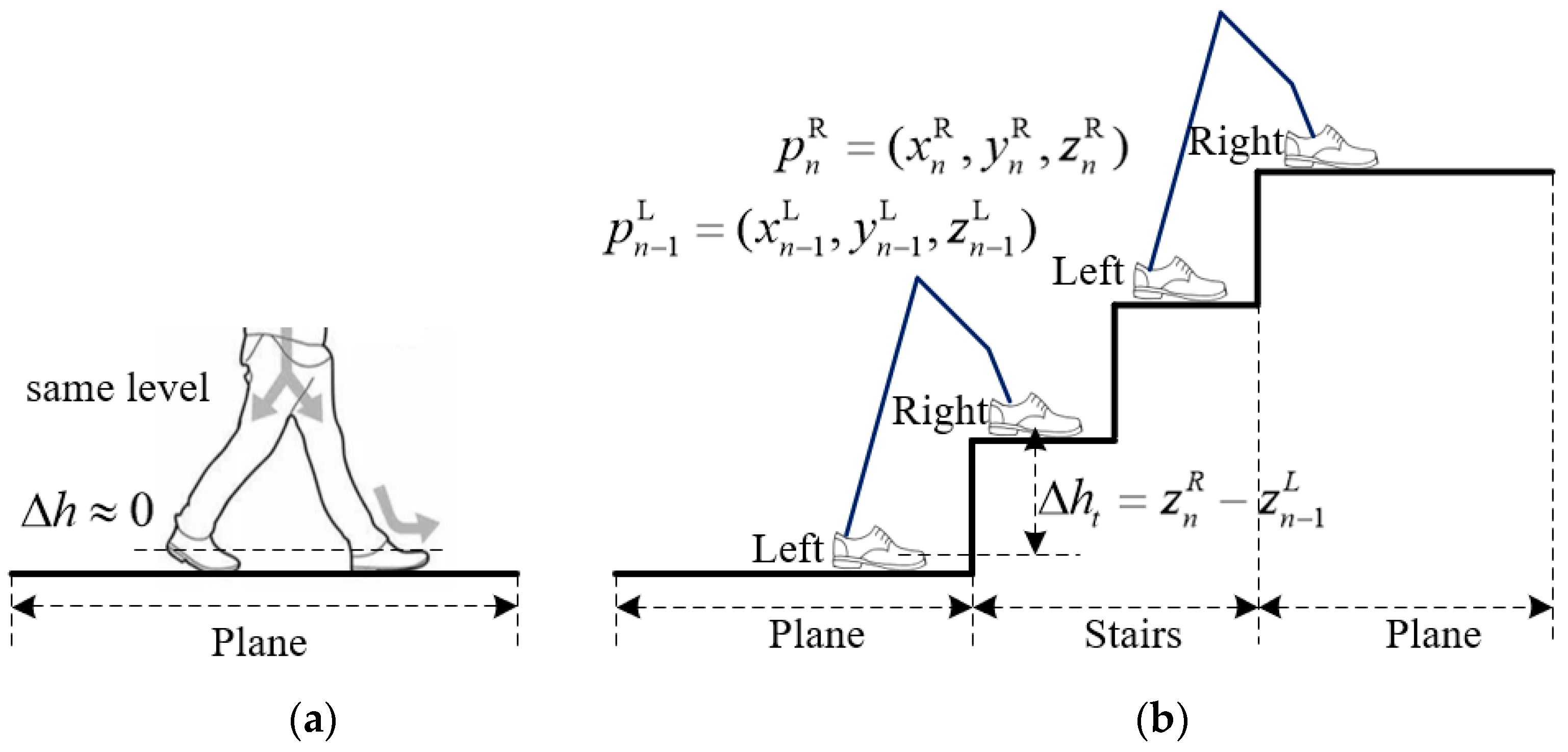
In the process of bipedal locomotion by pedestrians on the same plane, the theoretical value of the height difference between the two feet, calculated after each step is taken with the left and right feet, should be 0, as shown in
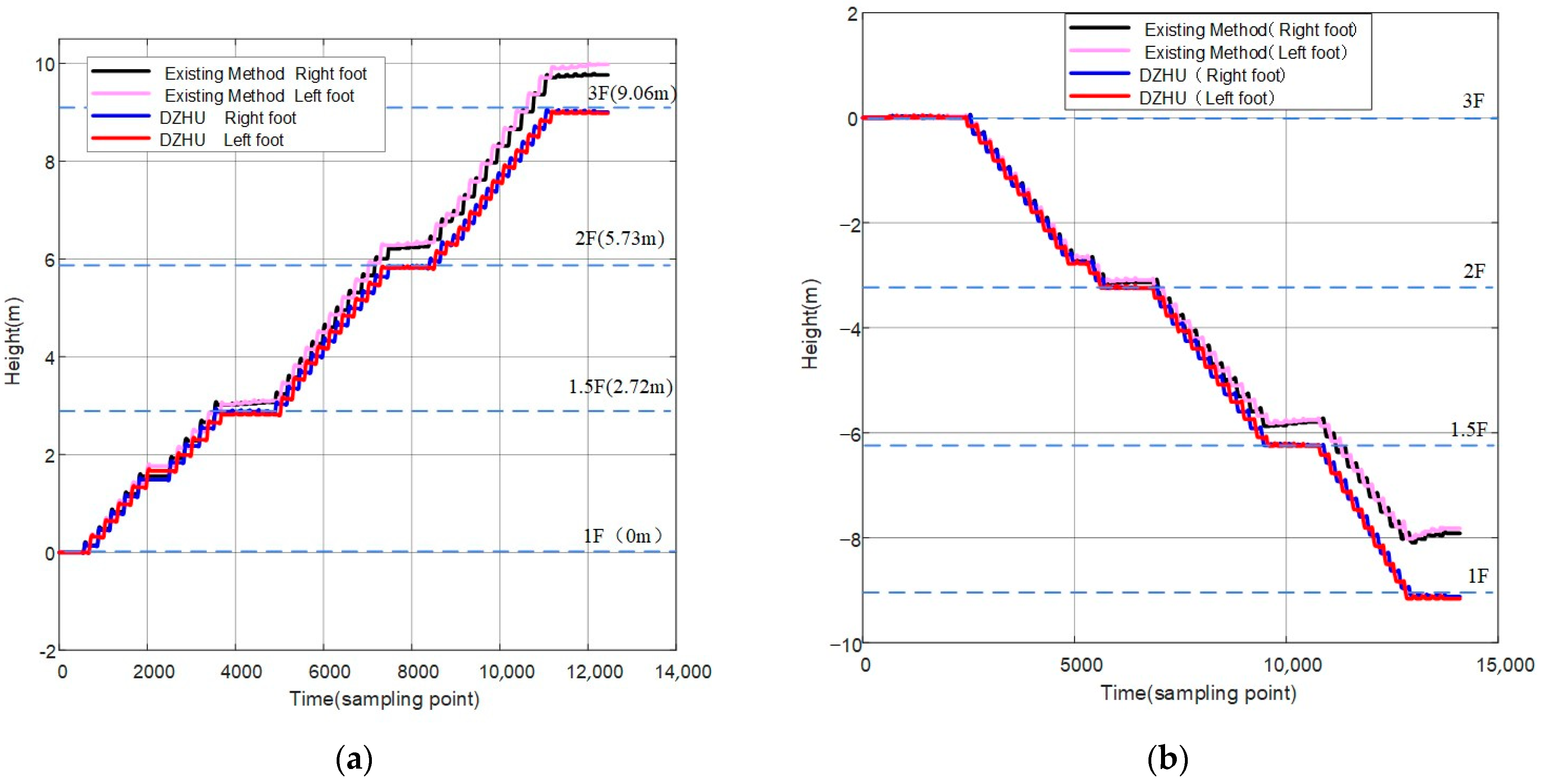
Figure 6a. Therefore, inspired by the zero-velocity update algorithm, the Dual-foot Zero Height Update (DZHU) algorithm is proposed. It updates the pedestrian’s height coordinates in the zero-velocity phase to obtain a more accurate height estimation.
The left and right foot initial coordinates are defined as and , respectively. After the right foot takes a step, the coordinates become . The calculated height difference between both feet is represented as . If the current value of is less than a pre-defined threshold, it is considered that the pedestrian is walking on a flat surface, and the height difference between the feet remains unchanged. represents the observed error in the height coordinates at time in the zero-velocity phase. Otherwise, the pedestrian’s height has truly changed, possibly due to activities such as ascending or descending stairs, and further analysis and verification are required, as explained below.
In the normal process of ascending and descending stairs, the height difference between the dual feet varies, rendering the dual-foot zero height update algorithm no longer applicable. In such situations, the height difference between the two feet is fixed at the height of
steps, as shown in
Figure 6b. Through research and analysis, we propose a height estimation algorithm that utilizes the height between the two feet as an observation. The prerequisite for applying this algorithm is that the pedestrian is not walking on an inclined floor or ramp and that the height of each step of indoor building stairs is nearly the same, meeting relevant industry standards. The algorithm’s modeling is based on specific assumptions and is only applicable for correcting height positioning results during extended stair descent. It cannot achieve height positioning correction in scenarios such as long slopes or elevators.
Determining
is pivotal in this context. Initially, the known height of an individual staircase step is defined as
. By assessing the height difference
between the two feet within various threshold ranges, an estimation of the number of steps
between the left and right feet is achieved. This process aims to obtain the observed error
in the height coordinates at time
. Subsequently, these observed errors are integrated into the observation vector
, resulting in the formulation depicted in Equation (24).
In the equation, represents the velocity error vector. In the experiments described in this paper, is defined, is set to a value between the height of one and two steps, and is set to a value between the height of two and three steps.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}