
Micromanipulation and Automatic Data Analysis to Determine the Mechanical Strength of Microparticles


Abstract
:1. Introduction
2. Materials and Methods
2.1. Microparticles for Micromanipulation
2.1.1. Microcapsules for Self-Sensing
2.1.2. Porous Polystyrene Microspheres
2.2. Micromanipulation of the Microparticles
2.2.1. Micromanipulation Rig
2.2.2. Micromanipulation of the Microcapsules for Self-Sensing
2.2.3. Micromanipulation of the Porous PS Microspheres
2.3. Rutpure Strength of Microparticles
2.4. Algorithms to Locate the Starting Point
2.4.1. “3σ” Algorithm
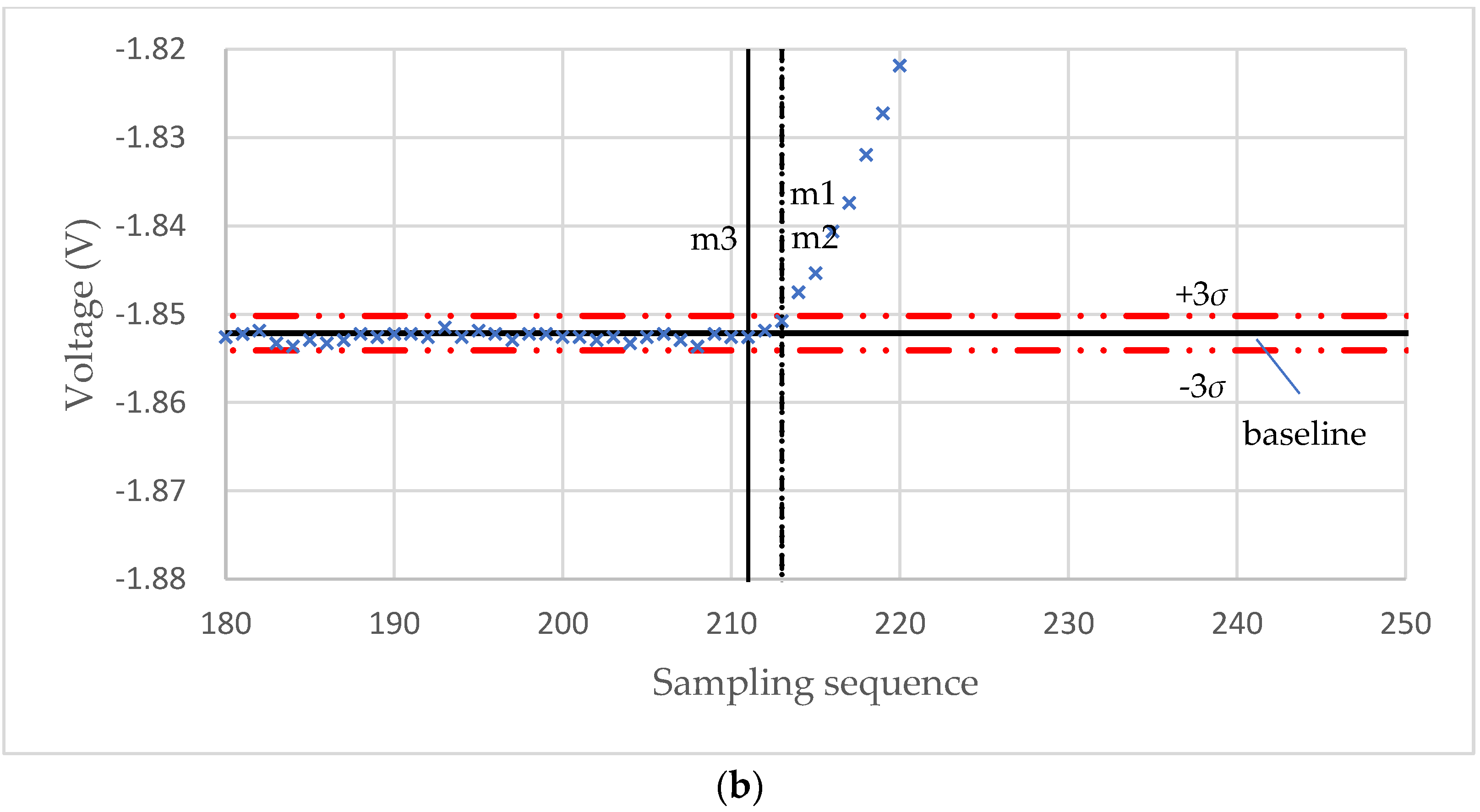
2.4.2. “3σ + Window” Algorithm
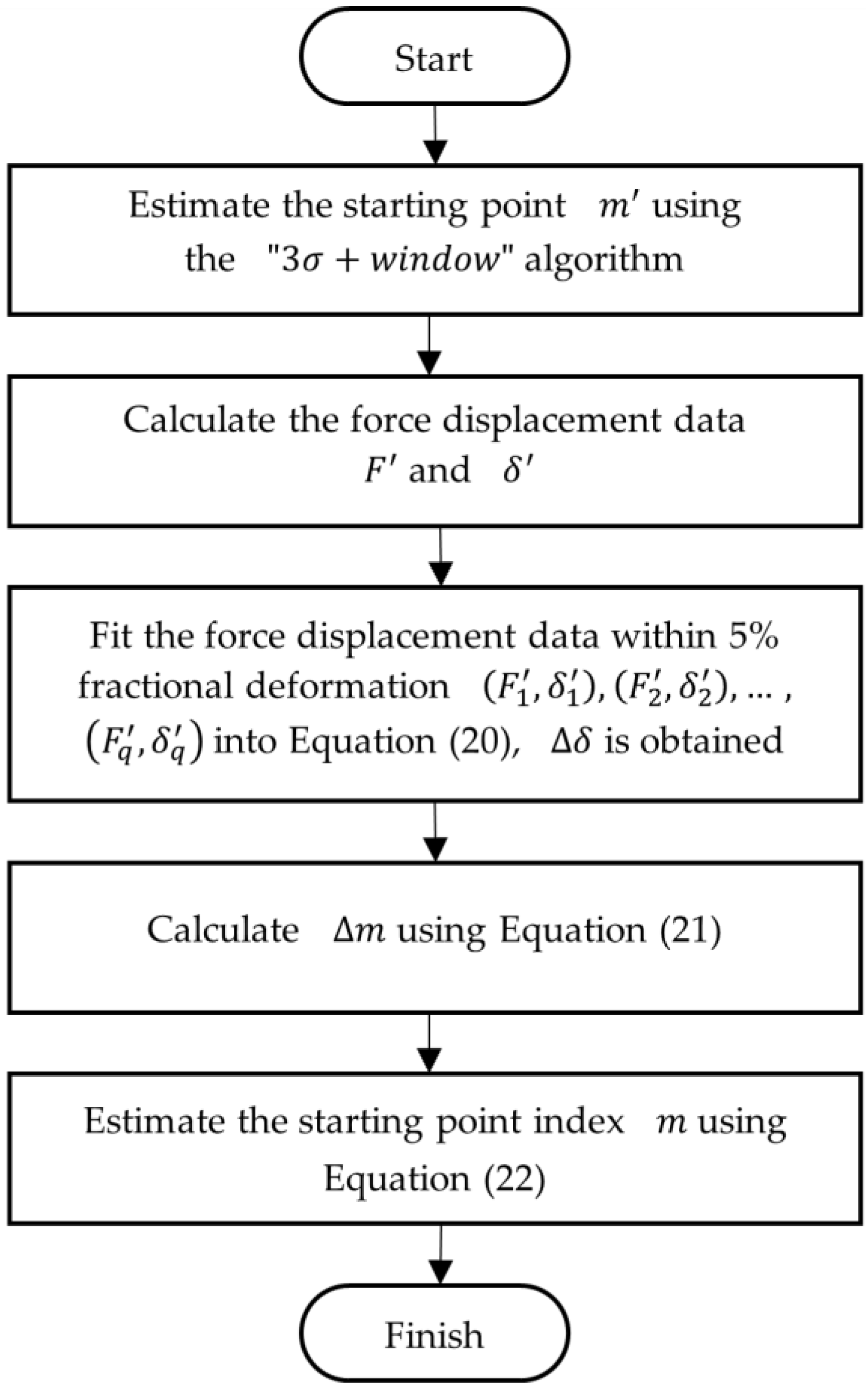
2.4.3. “3σ + Window + Hertz” Algorithm
2.5. Algorithms to Locate the Rupture Point
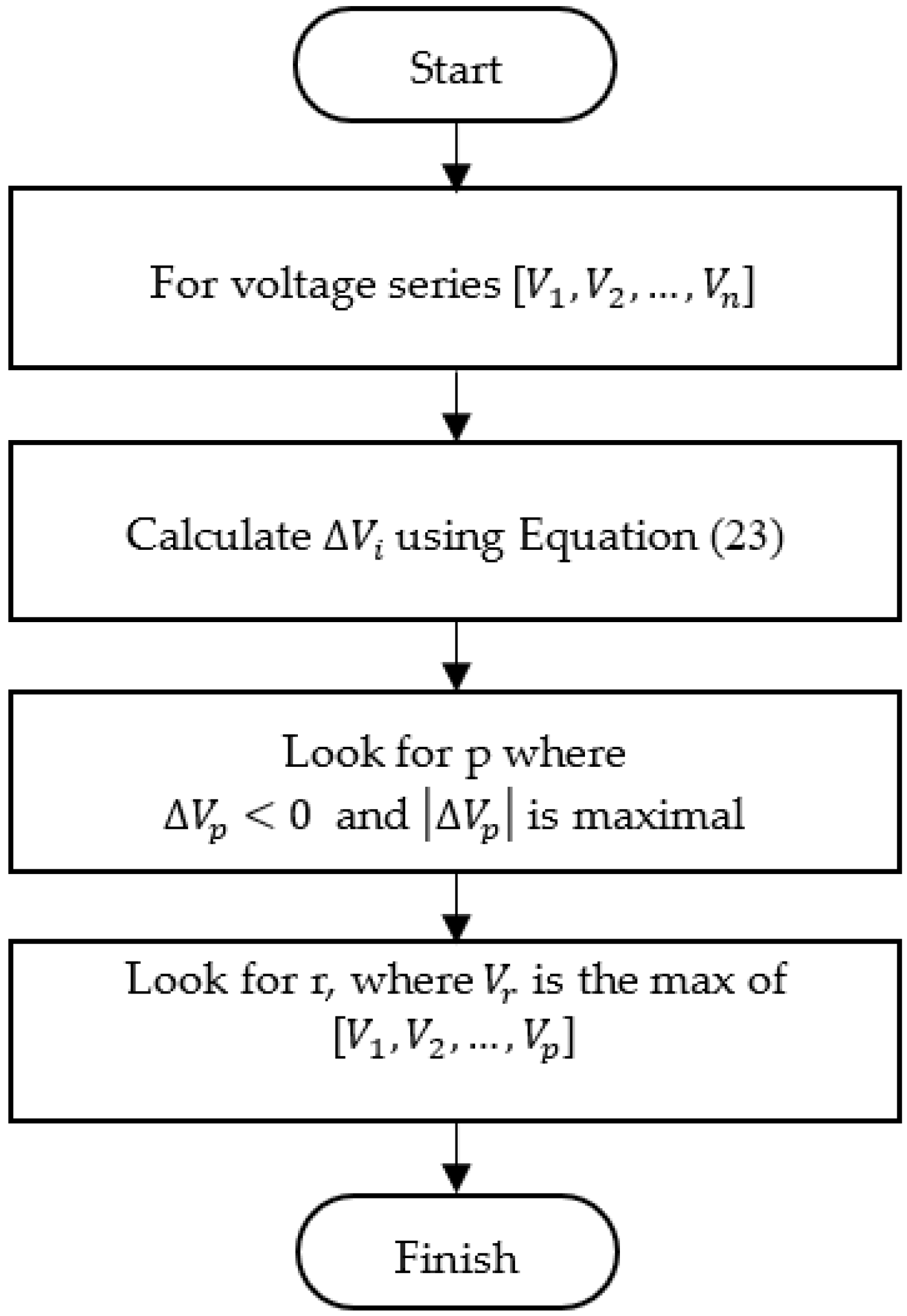
Maximum-Deceleration Algorithm
2.6. Development of the Software Package
3. Results and Discussion
3.1. Performance of the Algorithms
3.2. Further Discussion
3.3. Comparison with Other Algorithms
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Compliance of the force transducer () | |
| Coefficient of determination | |
| Initial diameter of the single microparticle (m) | |
| Random noise | |
| Young’s modulus (Pa) | |
| , | Compression force (N) |
| Rupture force (N) | |
| Estimated force in the “3σ + window + Hertz” algorithm (N) | |
| ) | Estimated force-displacement series in the “3σ + window + Hertz” algorithm |
| , | , used in the “3σ + window + Hertz” algorithm |
| Starting point index | |
| Starting point index found by the “3σ” algorithm | |
| Starting point index found by the “3σ + window” algorithm | |
| Starting point index found by the “3σ + window + Hertz” algorithm | |
| Estimated starting point index in the “3σ + window + Hertz” algorithm | |
| Values to compensate starting point index in the “3σ + window + Hertz” algorithm | |
| Pr | Possibility |
| Rupture point index | |
| Sensitivity of the force transducer () | |
| Standard deviation of baseline voltage (V) | |
| Particle toughness (Pa) | |
| Nominal rupture tension () | |
| Sampling time (s) | |
| Compression speed (m) | |
| , , , | Voltage (V) |
| Voltage series of the baseline (V) | |
| Raw voltage data series (V) | |
| Average voltage of the baseline (V) | |
| Voltage corresponding to rupture (V) | |
| , | Voltage deceleration in the “maximum-deceleration” algorithm (V) |
| Width of moving window in the “3σ + window” algorithm | |
| z | Number of initial voltage points to estimate baseline values |
| Greek letters | |
| Displacement (m) | |
| Displacement at rupture (m) | |
| Estimated displacement in the “3σ + window + Hertz” algorithm (m) | |
| Difference between the true displacement and the one obtained from the “3σ + window” algorithm (m) | |
| , | Fractional deformation |
| Fractional deformation at rupture | |
| Mean value | |
| Poisson’s ration | |
| Three sigma, three standard deviations | |
| , | Nominal stress (Pa) |
| Nominal rupture stress (Pa) | |
References
- Zhang, Z.; Stenson, J.D.; Thomas, C.R. Micromanipulation in mechanical characterisation of single particles. In Advances in Chemical Engineering; Li, J., Ed.; Academic Press: Cambridge, MA, USA, 2009; Chapter 2; pp. 29–85. [Google Scholar]
- Gray, A.; Egan, S.; Bakalis, S.; Zhang, Z. Determination of microcapsule physicochemical, structural, and mechanical properties. Particuology 2016, 24, 32–43. [Google Scholar] [CrossRef] [Green Version]
- Maia, F.; Tedim, J.; Bastos, A.C.; Ferreira, M.G.S.; Zheludkevich, M.L. Active sensing coating for early detection of corrosion processes. RSC Adv. 2014, 4, 17780–17786. [Google Scholar] [CrossRef] [Green Version]
- Aniskevich, A.; Kulakov, V.; Bulderberga, O.; Knotek, P.; Tedim, J.; Maia, F.; Leisis, V.; Zeleniakiene, D. Experimental characterisation and modelling of mechanical behaviour of microcapsules. J. Mater. Sci. 2020, 55, 13457–13471. [Google Scholar] [CrossRef]
- Roche, S.; Ibarz, G.; Crespo, C.; Chiminelli, A.; Araujo, A.; Santos, R.; Zhang, Z.; Li, X.; Dong, H. Self-sensing polymeric materials based on fluorescent microcapsules for the detection of microcracks. J. Mater. Res. Technol. 2021, 16, 505–515. [Google Scholar] [CrossRef]
- He, Y.; Bowen, J.; Andrews, J.W.; Liu, M.; Smets, J.; Zhang, Z. Adhesion of perfume-filled microcapsules to model fabric surfaces. J. Microencapsul. 2014, 31, 430–439. [Google Scholar] [CrossRef]
- Müller, E.; Chung, J.-T.; Zhang, Z.; Sprauer, A. Characterization of the mechanical properties of polymeric chromatographic particles by micromanipulation. J. Chromatogr. A 2005, 1097, 116–123. [Google Scholar] [CrossRef]
- Mercadé-Prieto, R.; Zhang, Z. Mechanical characterization of microspheres—Capsules, cells and beads: A review. J. Microencapsul. 2012, 29, 277–285. [Google Scholar] [CrossRef]
- Neuman, K.C.; Nagy, A. Single-molecule force spectroscopy: Optical tweezers, magnetic tweezers and atomic force microscopy. Nat. Methods 2008, 5, 491–505. [Google Scholar] [CrossRef]
- Zimmermann, U.; Steudle, E. Kontinuierliche Druckmessung in Pflanzenzellen. Naturwissenschaften 1969, 56, 634. [Google Scholar] [CrossRef]
- Hüsken, D.; Steudle, E.; Zimmermann, U. Pressure Probe Technique for Measuring Water Relations of Cells in Higher Plants. Plant Physiol. 1978, 61, 158–163. [Google Scholar] [CrossRef] [Green Version]
- Mitchison, J.M.; Swann, M.M. The Mechanical Properties of the Cell Surface. J. Exp. Biol. 1954, 31, 443–460. [Google Scholar] [CrossRef]
- Mitchison, J.M.; Swann, M.M. The mechanical properties of the cell surface: II. The unfertilized sea-urchin egg. J. Exp. Biol. 1954, 31, 461–472. [Google Scholar] [CrossRef]
- Binnig, G.; Quate, C.F.; Gerber, C. Atomic force microscope. Phys. Rev. Lett. 1986, 56, 930–933. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bennig, G.K. Atomic force microscope and method for imaging surfaces with atomic resolution. U.S. Patent RE33387, 4 August 1986. [Google Scholar]
- McConnaughey, W.B.; Petersen, N.O. Cell poker: An apparatus for stress-strain measurements on living cells. Rev. Sci. Instrum. 1980, 51, 575–580. [Google Scholar] [CrossRef] [PubMed]
- Broitman, E. Indentation Hardness Measurements at Macro-, Micro-, and Nanoscale: A Critical Overview. Tribol. Lett. 2016, 65, 23. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Ferenczi, M.; Lush, A.C.; Thomas, C.R. A novel micromanipulation technique for measuring the bursting strength of single mammalian cells. Appl. Microbiol. Biotechnol. 1991, 36, 208–210. [Google Scholar] [CrossRef]
- Zhang, Z.; Saunders, R.; Thomas, C.R. Mechanical strength of single microcapsules determined by a novel micromanipulation technique. J. Microencapsul. 1999, 16, 117–124. [Google Scholar] [CrossRef]
- Stenekes, R.J.H.; De Smedt, S.C.; Demeester, J.; Sun, G.; Zhang, Z.; Hennink, W.E. Pore Sizes in Hydrated Dextran Microspheres. Biomacromolecules 2000, 1, 696–703. [Google Scholar] [CrossRef]
- Sun, G.; Zhang, Z. Mechanical properties of melamine-formaldehyde microcapsules. J. Microencapsul. 2001, 18, 593–602. [Google Scholar]
- Xue, J.; Zhang, Z. Preparation and characterization of calcium-shellac spheres as a carrier of carbamide peroxide. J. Microencapsul. 2008, 25, 523–530. [Google Scholar] [CrossRef]
- Yan, Y.; Zhang, Z.; Stokes, J.; Zhou, Q.-Z.; Ma, G.-H.; Adams, M.J. Mechanical characterization of agarose micro-particles with a narrow size distribution. Powder Technol. 2009, 192, 122–130. [Google Scholar] [CrossRef]
- Olderøy, M.; Xie, M.; Andreassen, J.-P.; Strand, B.L.; Zhang, Z.; Sikorski, P. Viscoelastic properties of mineralized alginate hydrogel beads. J. Mater. Sci. Mater. Electron. 2012, 23, 1619–1627. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Zhang, Z. Mechanical properties of desiccated ragweed pollen grains determined by micromanipulation and theoretical modelling. Biotechnol. Bioeng. 2004, 85, 770–775. [Google Scholar] [CrossRef] [PubMed]
- Mashmoushy, H.; Zhang, Z.; Thomas, C.R. Micromanipulation measurement of the mechanical properties of baker’s yeast cells. Biotechnol. Tech. 1998, 12, 925–929. [Google Scholar] [CrossRef]
- Smith, A.; Zhang, Z.; Thomas, C. Wall material properties of yeast cells: Part Cell measurements and compression experiments. Chem. Eng. Sci. 2000, 55, 2031–2041. [Google Scholar] [CrossRef]
- Wang, Q.G.; Magnay, J.L.; Nguyen, B.; Thomas, C.R.; Zhang, Z.; El Haj, A.J.; Kuiper, N.J. Gene expression profiles of dynamically compressed single chondrocytes and chondrons. Biochem. Biophys. Res. Commun. 2009, 379, 738–742. [Google Scholar] [CrossRef]
- Nguyen, B.V.; Wang, Q.G.; Kuiper, N.J.; El Haj, A.J.; Thomas, C.R.; Zhang, Z. Biomechanical properties of single chondrocytes and chondrons determined by micromanipulation and finite-element modelling. J. R. Soc. Interface 2010, 7, 1723–1733. [Google Scholar] [CrossRef]
- Chen, M.; Zhang, Z.; Bott, T. Direct measurement of the adhesive strength of biofilms in pipes by micromanipulation. Biotechnol. Tech. 1998, 12, 875–880. [Google Scholar] [CrossRef]
- Chen, M.; Zhang, Z.; Bott, T. Effects of operating conditions on the adhesive strength of Pseudomonas fluorescens biofilms in tubes. Colloids Surf. B Biointerfaces 2005, 43, 61–71. [Google Scholar] [CrossRef]
- Liu, W.; Christian, G.; Zhang, Z.; Fryer, P. Development and Use of a Micromanipulation Technique for Measuring the Force Required to Disrupt and Remove Fouling Deposits. Food Bioprod. Process. 2002, 80, 286–291. [Google Scholar] [CrossRef]
- Liu, W.; Christian, G.; Zhang, Z.; Fryer, P. Direct measurement of the force required to disrupt and remove fouling deposits of whey protein concentrate. Int. Dairy J. 2006, 16, 164–172. [Google Scholar] [CrossRef]
- Liu, W.; Fryer, P.; Zhang, Z.; Zhao, Q.; Liu, Y. Identification of cohesive and adhesive effects in the cleaning of food fouling deposits. Innov. Food Sci. Emerg. Technol. 2006, 7, 263–269. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, Z.; Fryer, P. Identification and modelling of different removal modes in the cleaning of a model food deposit. Chem. Eng. Sci. 2006, 61, 7528–7534. [Google Scholar] [CrossRef]
- Du, G.; Zhang, Z.; He, P.; Zhang, Z.; Sun, X. Determination of the mechanical properties of polymeric microneedles by micromanipulation. J. Mech. Behav. Biomed. Mater. 2021, 117, 104384. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z. Novel Micromanipulation Studies of Biological and Non-Biological Materials, in School of Chemical Engineering. DSc Thesis, University of Birmingham, Birmingham, UK, 2016. [Google Scholar]
- Roduit, C.; Saha, B.; Alonso-Sarduy, L.; Volterra, A.; Dietler, G.; Kasas, S. OpenFovea: Open-source AFM data processing software. Nat. Methods 2012, 9, 774–775. [Google Scholar] [CrossRef]
- Dinarelli, S.; Girasole, M.; Longo, G. FC_analysis: A tool for investigating atomic force microscopy maps of force curves. BMC Bioinform. 2018, 19, 258. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Monclus, M.A.; Young, T.J.; Di Maio, D. AFM indentation method used for elastic modulus characterization of interfaces and thin layers. J. Mater. Sci. 2010, 45, 3190–3197. [Google Scholar] [CrossRef]
- Benítez, R.; Moreno-Flores, S.; Bolós, V.J.; Toca-Herrera, J.L. A new automatic contact point detection algorithm for AFM force curves. Microsc. Res. Tech. 2013, 76, 870–876. [Google Scholar] [CrossRef]
- Chang, Y.-R.; Raghunathan, V.K.; Garland, S.P.; Morgan, J.T.; Russell, P.; Murphy, C.J. Automated AFM force curve analysis for determining elastic modulus of biomaterials and biological samples. J. Mech. Behav. Biomed. Mater. 2014, 37, 209–218. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Yu, Y.; Han, W.; Zhu, L.; Si, T.; Wang, H.; Li, K.; Sun, Y.; He, Y. Solvent evaporation self-motivated continual synthesis of versatile porous polymer microspheres via foaming-transfer. Colloids Surfaces A Physicochem. Eng. Asp. 2021, 615, 126239. [Google Scholar] [CrossRef]
- Smith, S.W. The Scientist and Engineer’s Guide to Digital Signal Processing; California Technical Publishing: San Diego, CA, USA, 1997. [Google Scholar]
- Pukelsheim, F. The three sigma rule. Am. Stat. 1994, 48, 88–91. [Google Scholar]
- Montgomery, D.C.; Peck, E.A.; Vining, G.G. Introduction to Linear Regression Analysis, 5th ed.; Wiley Series in Probability and Statistics; Peck, E.A., Vining, G.G., Eds.; Wiley-Blackwell: Hoboken, NJ, USA, 2012. [Google Scholar]
- Song, Y.; Chen, K.-F.; Wang, J.-J.; Liu, Y.; Qi, T.; Li, G.L. Synthesis of Polyurethane/Poly(urea-formaldehyde) Double-shelled Microcapsules for Self-healing Anticorrosion Coatings. Chin. J. Polym. Sci. 2019, 38, 45–52. [Google Scholar] [CrossRef]
- Hu, J.; Chen, H.-Q.; Zhang, Z. Mechanical properties of melamine formaldehyde microcapsules for self-healing materials. Mater. Chem. Phys. 2009, 118, 63–70. [Google Scholar] [CrossRef]
- Gergely, C.; Senger, B.; Voegel, J.C.; Hörber, J.K.H.; Schaaf, P.; Hemmerlé, J. Semi-automatized processing of AFM force-spectroscopy data. Ultramicroscopy 2001, 87, 67–78. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Library | Version | License |
|---|---|---|
| Daria | 2.0.2 | MIT |
| EEPlus | 4.5.3.2 | LGPL-3.0-or-later |
| ExcelDataReader | 3.6.0 | MIT |
| ExcelDataReader.DataSet | 3.6.0 | MIT |
| Math.NET Numerics | 4.8.0 | https://numerics.mathdotnet.com/License.html (accessed on 8 May 2022). |
| Accord.NET | 3.8.0 | http://accord-framework.net/license.txt (accessed on 8 May 2022). |
| Algorithm | Diameter (μm) | Displacement at Rupture (μm) | Rupture Force (mN) | Deformation at Rupture (%) | Nominal Rupture Stress (MPa) | Nominal Rupture Tension (μN/μm) | Toughness (MPa) |
|---|---|---|---|---|---|---|---|
| Manual | 86.2 ± 3.1 | 40.5 ± 1.4 | 4.61 ± 0.22 | 47.7 ± 1.1 | 0.85 ± 0.05 | 53.8 ± 2.2 | 0.19 ± 0.01 |
| 3σ | 86.2 ± 3.1 | 44.7 ± 1.7 | 4.61 ± 0.22 | 52.6 ± 1.5 | 0.85 ± 0.05 | 53.8 ± 2.2 | 0.19 ± 0.01 |
| 3σ + Window | 86.2 ± 3.1 | 39.0 ± 1.4 | 4.61 ± 0.22 | 45.7 ± 1.1 | 0.85 ± 0.05 | 53.8 ± 2.2 | 0.19 ± 0.01 |
| 3σ + Window + Hertz | 86.2 ± 3.1 | 41.0 ± 1.4 | 4.61 ± 0.22 | 48.2 ± 1.1 | 0.85 ± 0.05 | 53.8 ± 2.2 | 0.19 ± 0.01 |
| Algorithm | Diameter (μm) | Displacement at Rupture (μm) | Rupture Force (mN) | Deformation at Rupture (%) | Nominal Rupture Stress (MPa) | Nominal Rupture Tension (μN/μm) | Toughness (MPa) |
|---|---|---|---|---|---|---|---|
| Manual | 11.1 ± 0.4 | 1.3 ± 0.1 | 2.53 ± 0.15 | 12.0 ± 0.4 | 26.4 ± 1.2 | 223.0 ± 9.9 | 1.73 ± 0.11 |
| 3σ | 11.1 ± 0.4 | 2.5 ± 0.3 | 2.53 ± 0.15 | 21.9 ± 2.3 | 26.4 ± 1.2 | 223.0 ± 9.9 | 1.73 ± 0.11 |
| 3σ + Window | 11.1 ± 0.4 | 1.3 ± 0.1 | 2.53 ± 0.15 | 11.9 ± 0.4 | 26.4 ± 1.2 | 223.0 ± 9.9 | 1.73 ± 0.11 |
| 3σ + Window + Hertz | 11.1 ± 0.4 | 1.4 ± 0.1 | 2.53 ± 0.15 | 12.7 ± 0.4 | 26.4 ± 1.2 | 223.0 ± 9.9 | 1.73 ± 0.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; He, Y.; Zhang, Z. Micromanipulation and Automatic Data Analysis to Determine the Mechanical Strength of Microparticles. Micromachines 2022, 13, 751. https://doi.org/10.3390/mi13050751
Zhang Z, He Y, Zhang Z. Micromanipulation and Automatic Data Analysis to Determine the Mechanical Strength of Microparticles. Micromachines. 2022; 13(5):751. https://doi.org/10.3390/mi13050751
Chicago/Turabian StyleZhang, Zhihua, Yanping He, and Zhibing Zhang. 2022. "Micromanipulation and Automatic Data Analysis to Determine the Mechanical Strength of Microparticles" Micromachines 13, no. 5: 751. https://doi.org/10.3390/mi13050751
APA StyleZhang, Z., He, Y., & Zhang, Z. (2022). Micromanipulation and Automatic Data Analysis to Determine the Mechanical Strength of Microparticles. Micromachines, 13(5), 751. https://doi.org/10.3390/mi13050751