
Schistoscope: An Automated Microscope with Artificial Intelligence for Detection of Schistosoma haematobium Eggs in Resource-Limited Settings

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
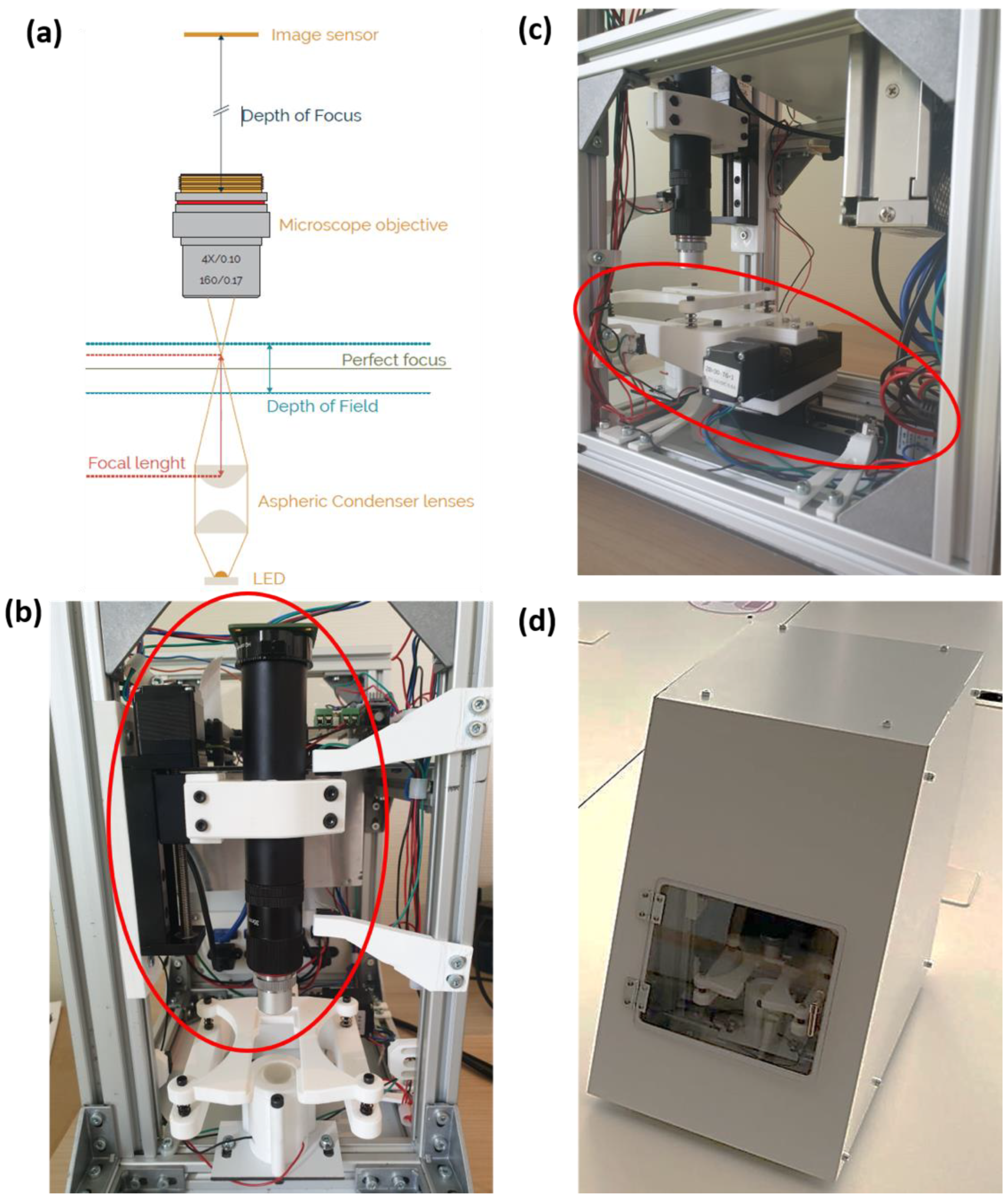
2.1. Optical System
2.2. Electronics System
2.3. Supporting Structures and Enclosure
2.4. Sample Preparation
2.5. Autofocus and Auto-Scanning System
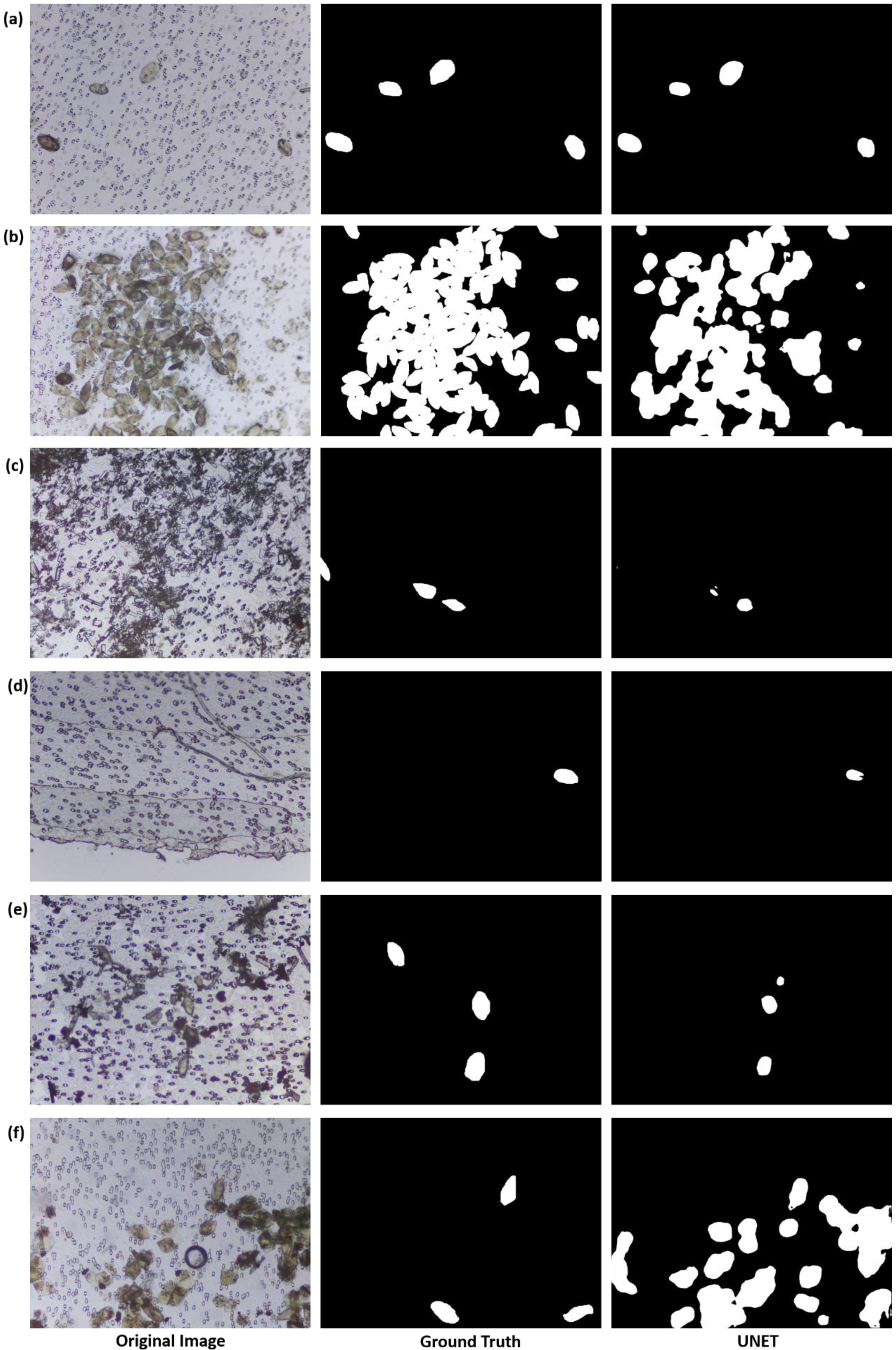
2.6. Automatic S. haematobium Egg Detection
- Annotation of the exact boundary pixels of the S. haematobium eggs was not strictly enforced due to the limitation posed by the size of the eggs;
- The pixel values of the background and artifacts in the ground-truth image were labelled as ‘0’ and the eggs as ‘1’;
- There were few S. mansoni eggs found in the images of the clinical urine samples and their pixel values were labelled as ‘1’;
- Pixels of partially cut eggs at the edges of the images were labelled as ‘1’;
- The region of the eggs covered by artifacts was labelled as ‘0’.
3. Results and Discussion
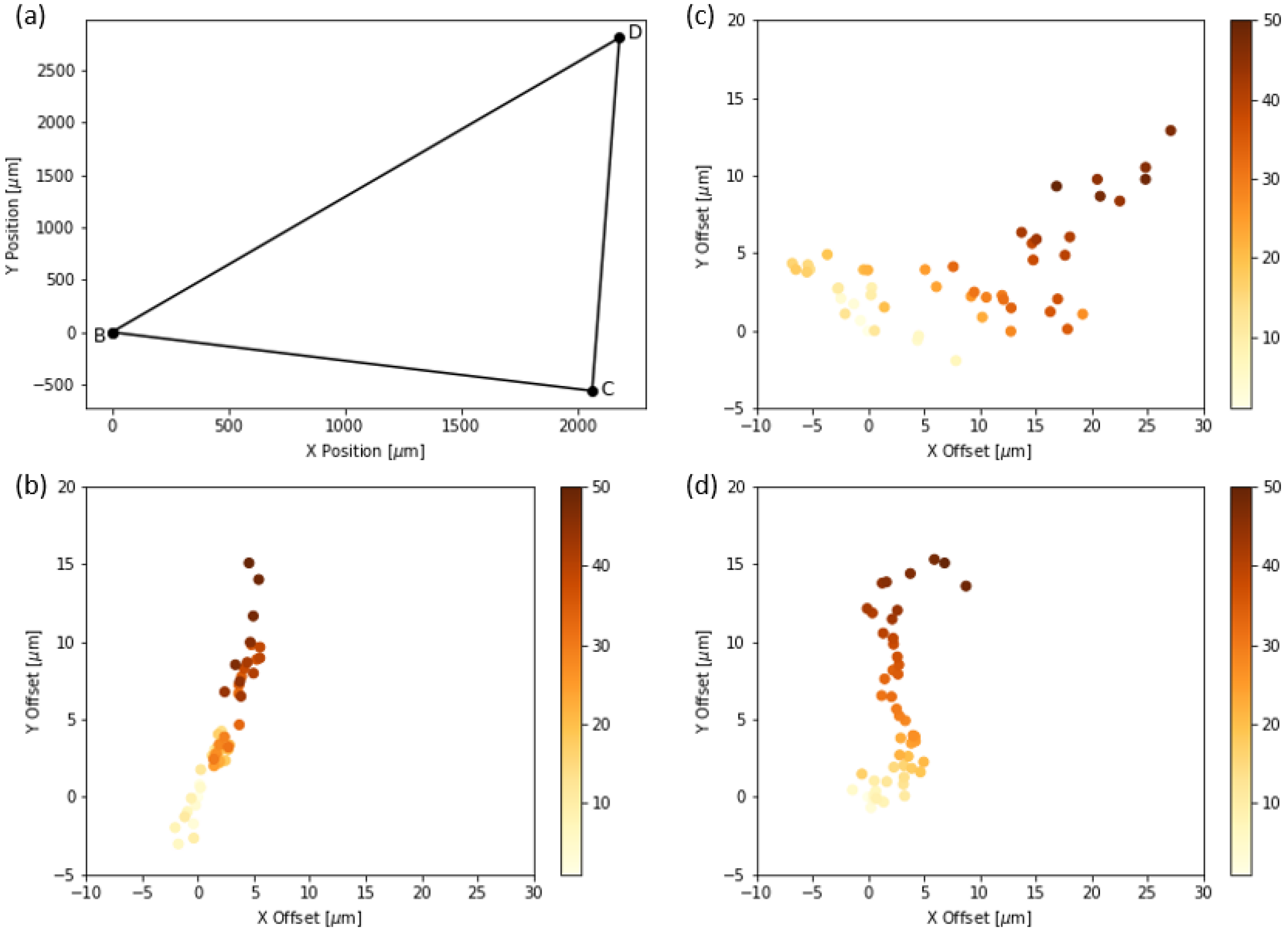
3.1. Sample Stage XY Position Repeatability
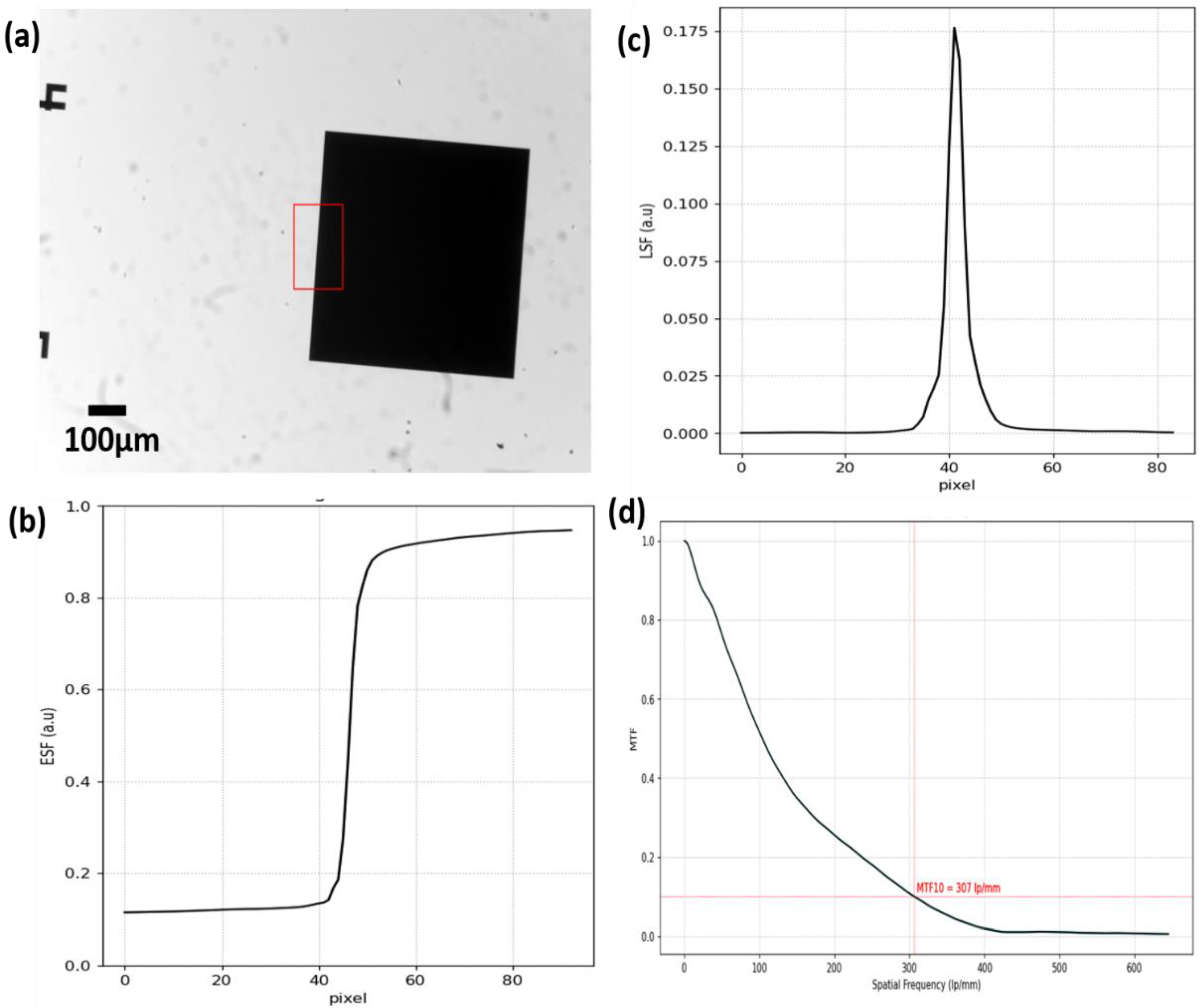
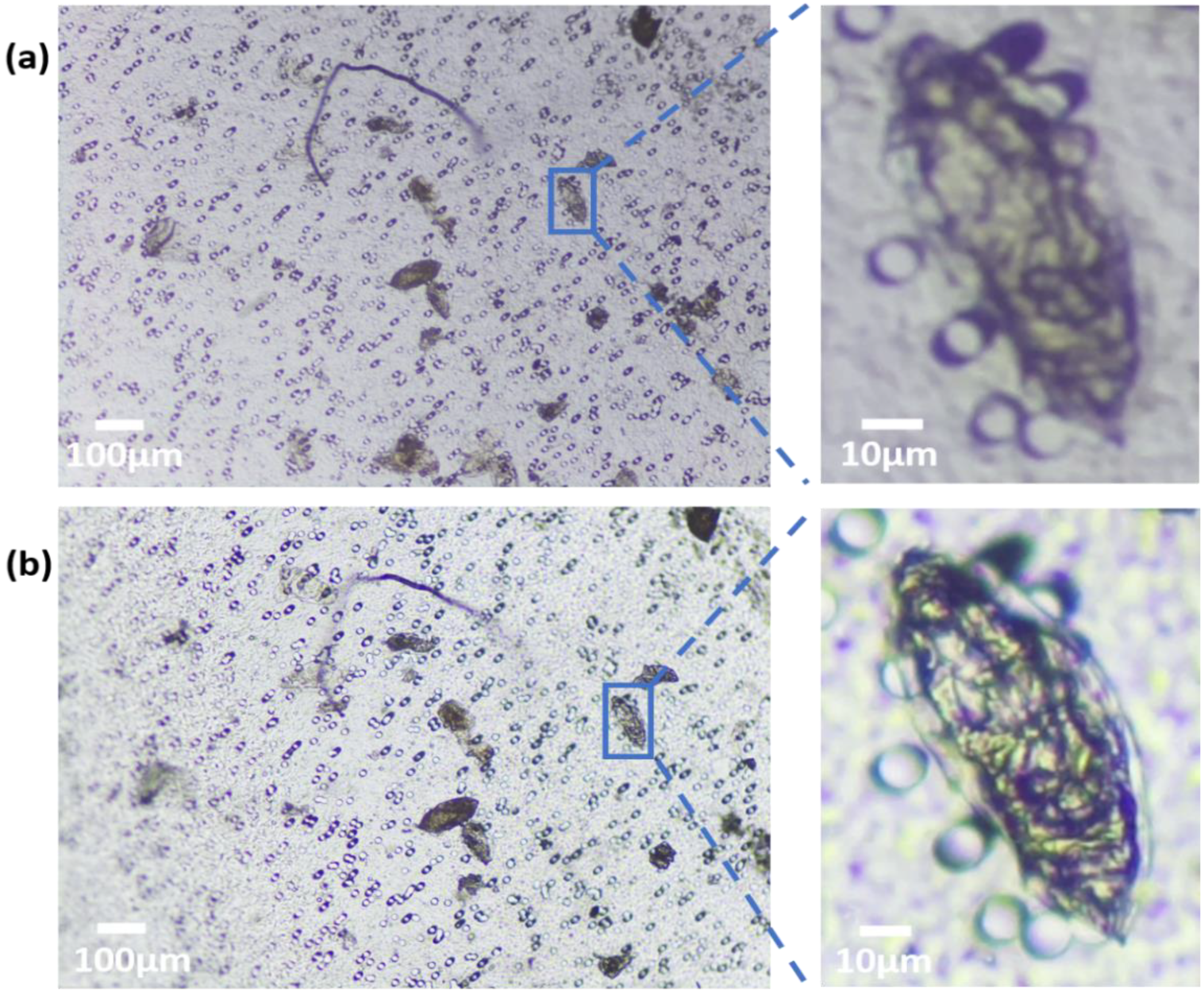
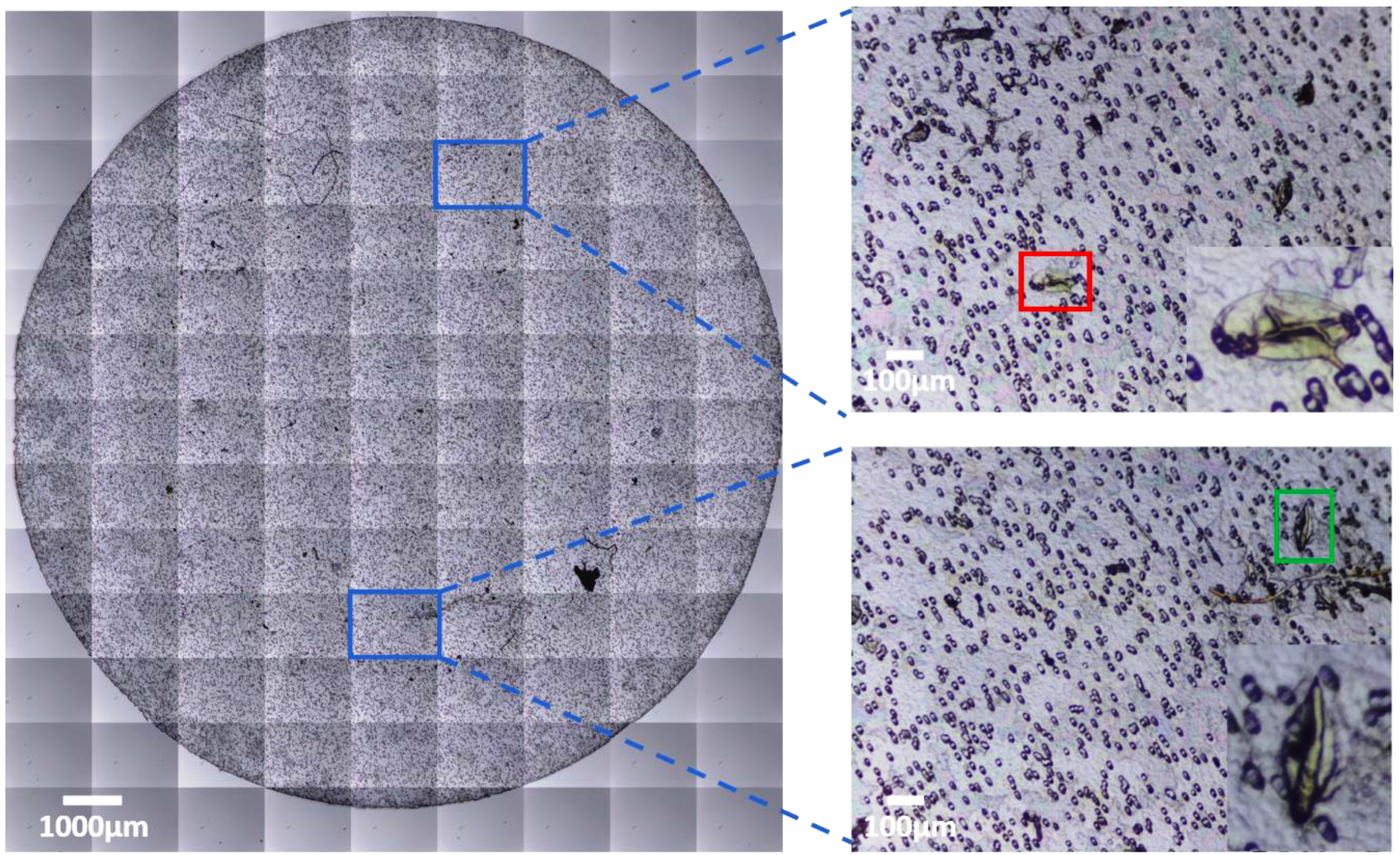
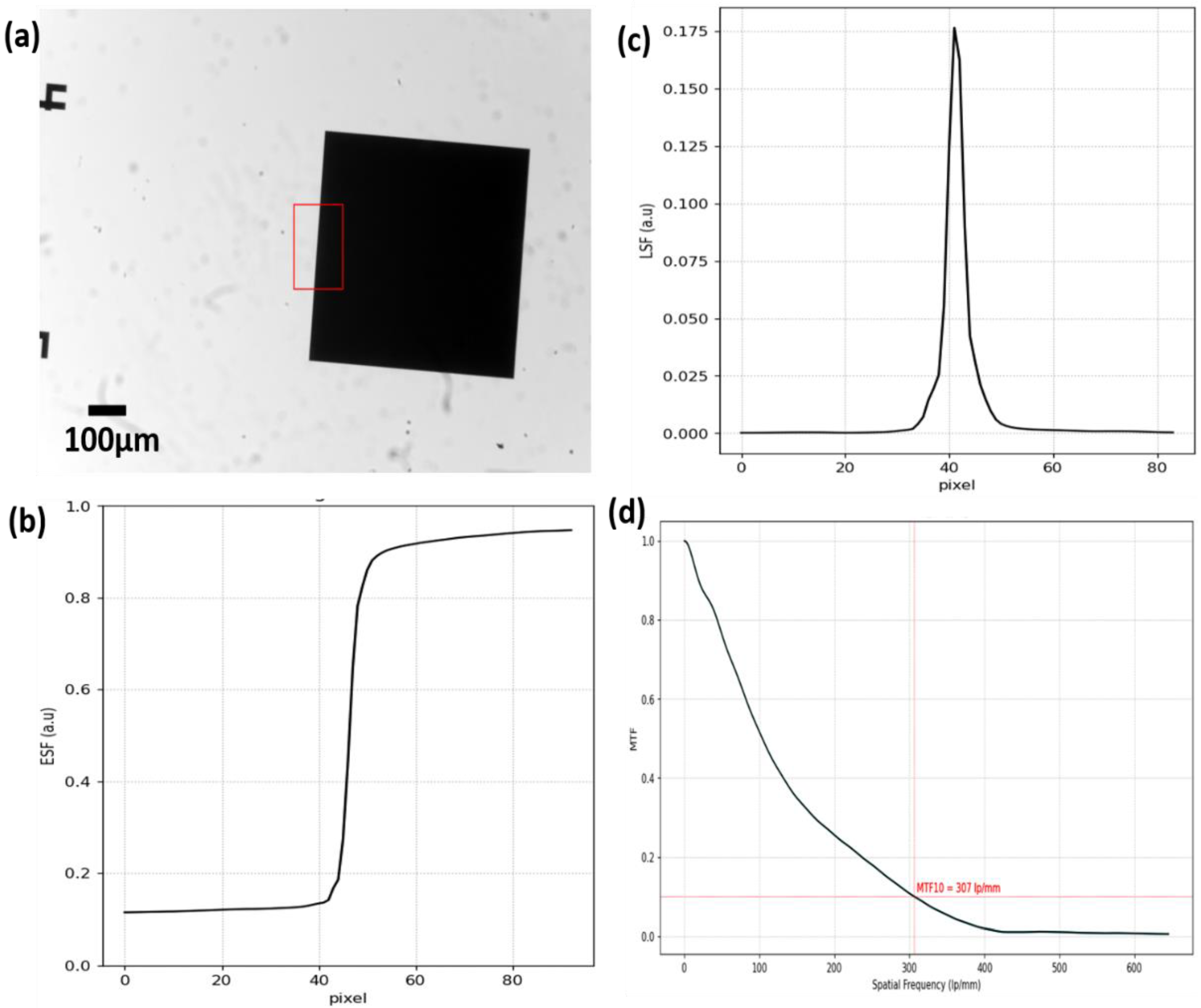
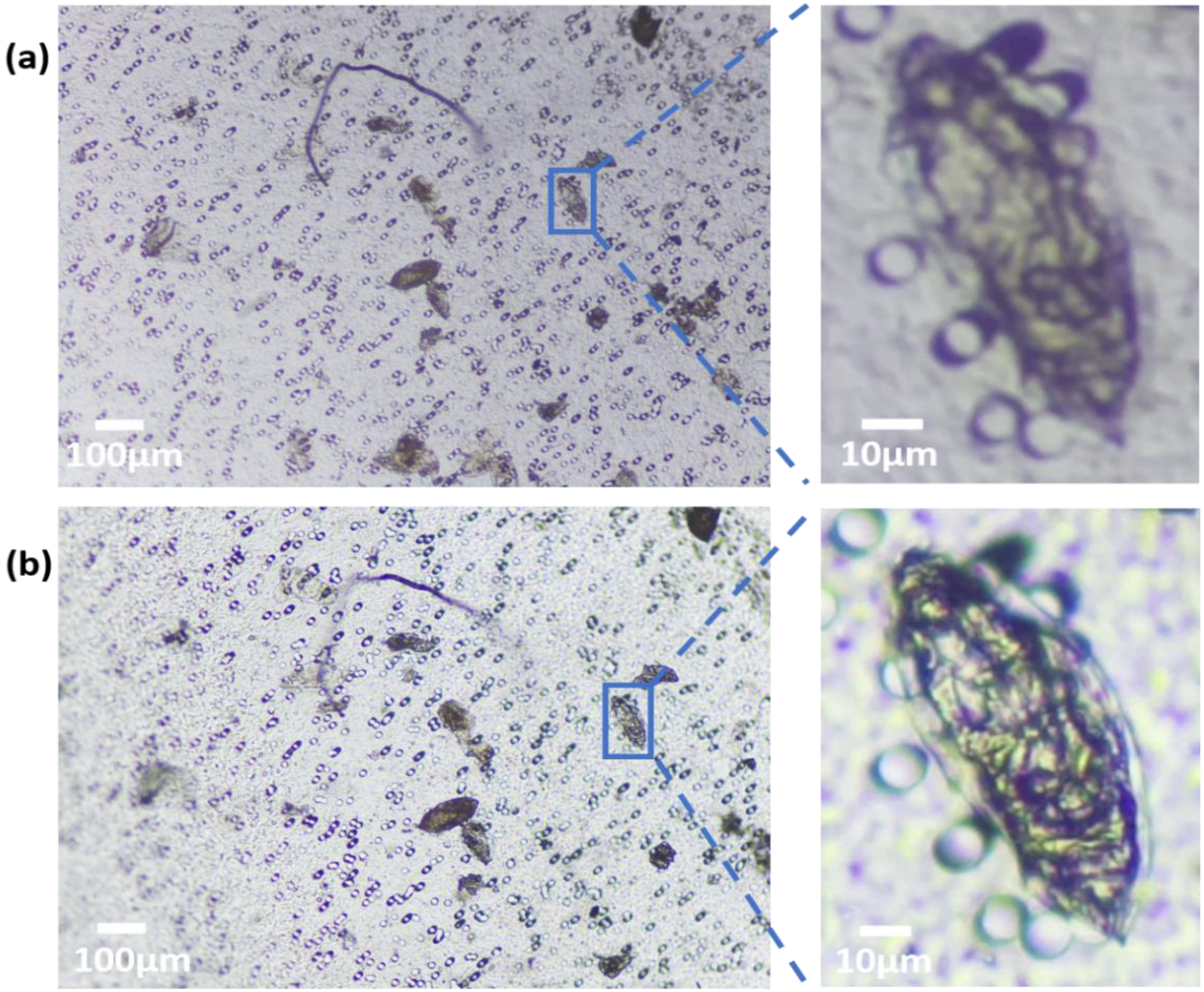
3.2. Imaging Performance
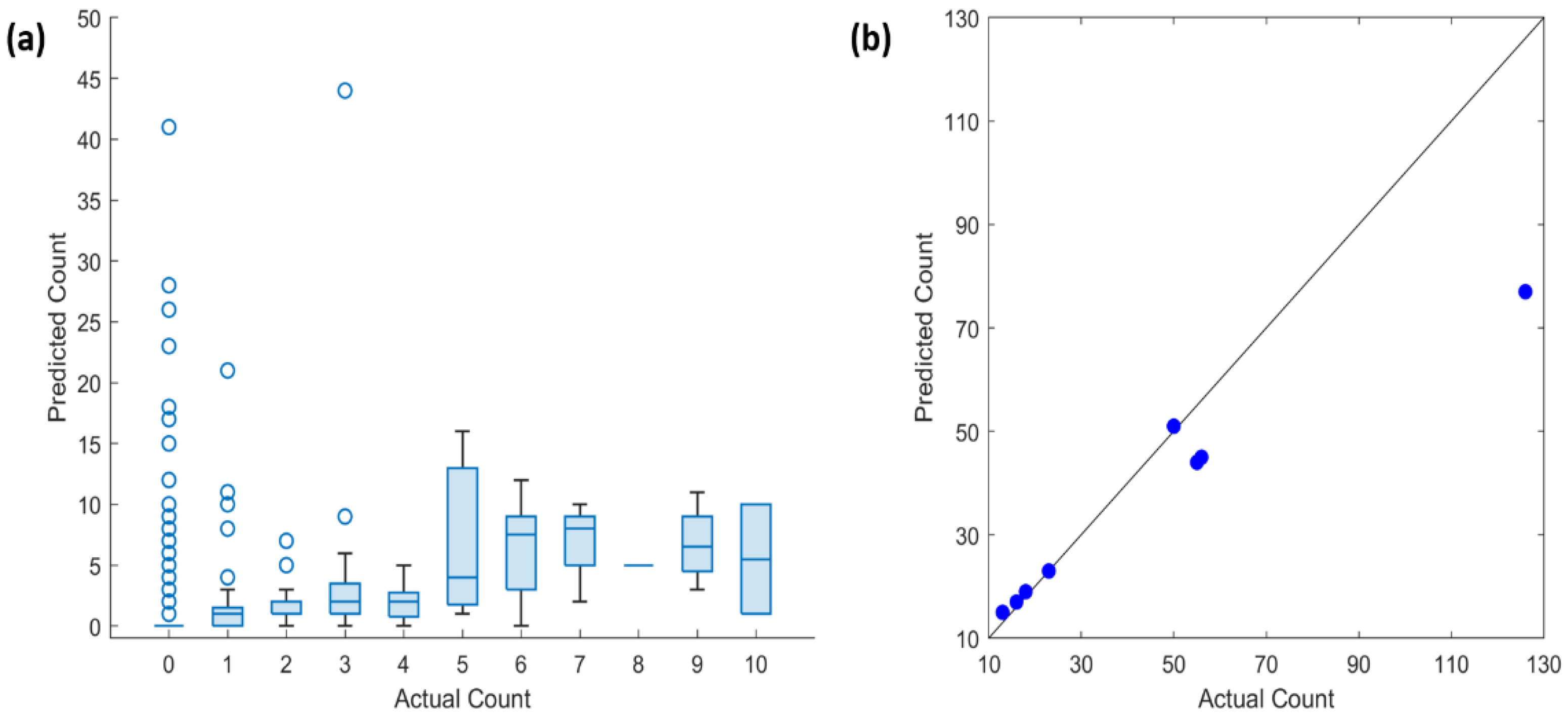
3.3. Performance Evaluation of S. haematobium Egg Detection Algorithm
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, H.; Isikman, S.O.; Mudanyali, O.; Greenbaum, A.; Ozcan, A. Optical imaging techniques for point-of-care diagnostics. Lab A Chip 2013, 13, 51–67. [Google Scholar] [CrossRef] [PubMed]
- Thétiot-Laurent, S.A.-L.; Boissier, J.; Robert, A.; Meunier, B. Schistosomiasis Chemotherapy. Angew. Chem. Int. Ed. 2013, 52, 7936–7956. [Google Scholar] [CrossRef]
- CDC-Schistosomiasis. Available online: https://www.cdc.gov/parasites/schistosomiasis/index.html (accessed on 12 February 2022).
- Schistosomiasis. Available online: https://www.who.int/news-room/fact-sheets/detail/schistosomiasis (accessed on 12 February 2022).
- Colley, D.G.; Bustinduy, A.L.; Secor, W.E.; King, C.H. Human schistosomiasis. Lancet 2014, 383, 2253–2264. [Google Scholar] [CrossRef]
- Le, L.; Hsieh, M.H. Diagnosing urogenital schistosomiasis: Dealing with diminishing returns. Trends Parasitol. 2017, 33, 378–387. [Google Scholar] [CrossRef] [PubMed]
- Hagemann, P.; World Health Organization. Manual of Basic Techniques for a Health Laboratory. Clin. Chem. 2003, 49, 1712–1713. [Google Scholar]
- Long, A.D. Malaria: Obstacles and Opportunities; Agency for International Development: Washington, DC, USA, 1991. [Google Scholar]
- O’Meara, W.P.; Barcus, M.; Wongsrichanalai, C.; Muth, S.; Maguire, J.D.; Jordan, R.G.; Prescott, W.R.; McKenzie, F.E. Reader technique as a source of variability in determining malaria parasite density by microscopy. Malar. J. 2006, 5, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Jujjavarapu, S. Automating the Diagnosis and Quantification of Urinary Schistosomiasis. Master Thesis, Delft University of Technology, Delft, The Netherlands, 2020. [Google Scholar]
- World Health Organization. Ending the Neglect. to Attain the Sustainable Development Goals: A Global Strategy on Water, Sanitation and Hygiene to Combat Neglected Tropical Diseases, 2021–2030; World Health Organization: Geneva, Switzerland, 2021. [Google Scholar]
- Bogoch, I.I.; Andrews, J.R.; Speich, B.; Utzinger, J.; Ame, S.M.; Ali, S.M.; Keiser, J. Mobile phone microscopy for the diagnosis of soil-transmitted helminth infections: A proof-of-concept study. Am. J. Trop. Med. Hyg. 2013, 88, 626–629. [Google Scholar] [CrossRef] [PubMed]
- Switz, N.A.; D’Ambrosio, M.V.; Fletcher, D.A. Low-Cost Mobile Phone Microscopy with a Reversed Mobile Phone Camera Lens. PLoS ONE 2014, 9, e95330. [Google Scholar]
- Cybulski, J.S.; Clements, J.; Prakash, M. Foldscope: Origami-based paper microscope. PLoS ONE 2014, 9, e98781. [Google Scholar] [CrossRef] [Green Version]
- Sowerby, S.J.; Crump, J.A.; Johnstone, M.C.; Krause, K.L.; Hill, P.C. Smartphone microscopy of parasite eggs accumulated into a single field of view. Am. J. Trop. Med. Hyg. 2016, 94, 227–230. [Google Scholar] [CrossRef]
- Coulibaly, J.T.; Ouattara, M.; D’Ambrosio, M.V.; Fletcher, D.A.; Keiser, J.; Utzinger, J.; N’Goran, E.K.; Andrews, J.R.; Bogoch, I.I. Accuracy of mobile phone and handheld light microscopy for the diagnosis of schistosomiasis and intestinal protozoa infections in Côte d’Ivoire. PLoS Neglected Trop. Dis. 2016, 10, e0004768. [Google Scholar] [CrossRef] [Green Version]
- Chagas, A.M.; Prieto-Godino, L.L.; Arrenberg, A.B.; Baden, T. The€ 100 Lab: A 3D-Printable Open-Source Platform for Fluorescence Microscopy, Optogenetics, and Accurate Temperature Control during Behaviour of Zebrafish, Drosophila, and Caenorhabditis Elegans. PLoS Biol. 2017, 15, e2002702. [Google Scholar] [CrossRef] [Green Version]
- Aidukas, T.; Eckert, R.; Harvey, A.R.; Waller, L.; Konda, P.C. Low-cost, sub-micron resolution, wide-field computational microscopy using opensource hardware. Sci. Rep. 2019, 9, 7457. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Campbell, R.A.; Eifert, R.W.; Turner, G.C. Openstage: A low-cost motorized microscope stage with sub-micron positioning accuracy. PLoS ONE 2014, 9, e88977. [Google Scholar] [CrossRef]
- Grier, Z.; Soddu, M.F.; Kenyatta, N.; Odame, S.A.; Sanders, J.; Wright, L.; Anselmi, F. A low-cost do-it-yourself microscope kit for hands-on science education. In Proceedings of the Optics Education and Outreach V, San Diego, CA, USA, 22 August 2018; International Society for Optics and Photonics: San Diego, CA, USA, 2018; Volume 10741, p. 107410K. [Google Scholar]
- Collins, J.T.; Knapper, J.; Stirling, J.; Mduda, J.; Mkindi, C.; Mayagaya, V.; Mwakajinga, G.A.; Nyakyi, P.T.; Sanga, V.L.; Carbery, D. Robotic microscopy for everyone: The openflexure microscope. Biomed. Opt. Express 2020, 11, 2447–2460. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Soto-Montoya, H.; Voisin, M.; Valenzuela, L.F.; Prakash, M. Octopi: Open configurable high-throughput imaging platform for infectious disease diagnosis in the field. BioRxiv 2019. [Google Scholar] [CrossRef] [Green Version]
- Avci, D.; Varol, A. An expert diagnosis system for classification of human parasite eggs based on multi-class SVM. Expert Syst. Appl. 2009, 36, 43–48. [Google Scholar] [CrossRef]
- Şengül, G. Classification of parasite egg cells using gray level cooccurence Matrix and KNN. Biomed. Res. (0970-938X) 2016, 27, 829–834. [Google Scholar]
- Lee, C.-C.; Huang, P.-J.; Yeh, Y.-M.; Li, P.-H.; Chiu, C.-H.; Cheng, W.-H.; Tang, P. Helminth Egg Analysis Platform (HEAP): An opened platform for microscopic helminth egg identification and quantification based on the integration of deep learning architectures. J. Microbiol. Immunol. Infect. 2021. [Google Scholar] [CrossRef]
- Agbana, T.E.; Diehl, J.-C.; van Pul, F.; Khan, S.M.; Patlan, V.; Verhaegen, M.; Vdovin, G. Imaging & Identification of Malaria Parasites Using Cellphone Microscope with a Ball Lens. PLoS ONE 2018, 13, e0205020. [Google Scholar]
- Agbana, T.; Van, G.-Y.; Oladepo, O.; Vdovin, G.; Oyibo, W.; Diehl, J.C. Schistoscope: Towards a locally producible smart diagnostic device for Schistosomiasis in Nigeria. In Proceedings of the 2019 IEEE Global Humanitarian Technology Conference (GHTC), Seattle, WA, USA, 17–20 October 2019; pp. 1–8. [Google Scholar]
- Diehl, J.C.; Oyibo, P.; Agbana, T.; Jujjavarapu, S.; Van, G.-Y.; Vdovin, G.; Oyibo, W. Schistoscope: Smartphone versus Raspberry Pi based low-cost diagnostic device for urinary Schistosomiasis. In Proceedings of the 2020 IEEE Global Humanitarian Technology Conference (GHTC), Seattle, WA, USA, 29 October–1 November 2020; pp. 1–8. [Google Scholar]
- Braakman, I. Improving an Optical Diagnostics Device for Schistosomiasis. Master Thesis, Delft University of Technology, Delft, The Netherlands, 2021. [Google Scholar]
- Agbana, T.; Nijman, P.; Hoeber, M.; van Grootheest, D.; van Diepen, A.; van Lieshout, L.; Diehl, J.-C.; Verhaegen, M.; Vdovine, G. Detection of Schistosoma haematobium using lensless imaging and flow cytometry, a proof of principle study. In Proceedings of the Optical Diagnostics and Sensing XX: Toward Point-of-Care Diagnostics, San Francisco, CA, USA, 3 February 2020; International Society for Optics and Photonics: San Francisco, CA, USA, 2020; Volume 11247, p. 112470F. [Google Scholar]
- Kosinski, K.C.; Bosompem, K.M.; Stadecker, M.J.; Wagner, A.D.; Plummer, J.; Durant, J.L.; Gute, D.M. Diagnostic accuracy of urine filtration and dipstick tests for Schistosoma haematobium infection in a lightly infected population of Ghanaian schoolchildren. Acta Trop. 2011, 118, 123–127. [Google Scholar] [CrossRef] [PubMed]
- Bosch, F.; Palmeirim, M.S.; Ali, S.M.; Ame, S.M.; Hattendorf, J.; Keiser, J. Diagnosis of soil-transmitted helminths using the Kato-Katz technique: What is the influence of stirring, storage time and storage temperature on stool sample egg counts? PLoS Negl. Trop. Dis. 2021, 15, e0009032. [Google Scholar] [CrossRef] [PubMed]
- Jsbroks, Features. Available online: https://github.com/jsbroks/coco-annotator (accessed on 18 December 2021).
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Cham, Switzerland, 2015; pp. 234–241. [Google Scholar]
- Nai, Y.-H.; Teo, B.W.; Tan, N.L.; O’Doherty, S.; Stephenson, M.C.; Thian, Y.L.; Chiong, E.; Reilhac, A. Comparison of metrics for the evaluation of medical segmentations using prostate MRI dataset. Comput. Biol. Med. 2021, 134, 104497. [Google Scholar] [CrossRef] [PubMed]
- ISO 12233:2017. Available online: https://www.iso.org/cms/render/live/en/sites/isoorg/contents/data/standard/07/16/71696.html (accessed on 3 March 2022).
- World Health Organization. Diagnostic Target Product Profiles for Monitoring, Evaluation and Surveillance of Schistosomiasis Control Programmes; World Health Organization: Geneva, Switzerland, 2021. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oyibo, P.; Jujjavarapu, S.; Meulah, B.; Agbana, T.; Braakman, I.; van Diepen, A.; Bengtson, M.; van Lieshout, L.; Oyibo, W.; Vdovine, G.; et al. Schistoscope: An Automated Microscope with Artificial Intelligence for Detection of Schistosoma haematobium Eggs in Resource-Limited Settings. Micromachines 2022, 13, 643. https://doi.org/10.3390/mi13050643
Oyibo P, Jujjavarapu S, Meulah B, Agbana T, Braakman I, van Diepen A, Bengtson M, van Lieshout L, Oyibo W, Vdovine G, et al. Schistoscope: An Automated Microscope with Artificial Intelligence for Detection of Schistosoma haematobium Eggs in Resource-Limited Settings. Micromachines. 2022; 13(5):643. https://doi.org/10.3390/mi13050643
Chicago/Turabian StyleOyibo, Prosper, Satyajith Jujjavarapu, Brice Meulah, Tope Agbana, Ingeborg Braakman, Angela van Diepen, Michel Bengtson, Lisette van Lieshout, Wellington Oyibo, Gleb Vdovine, and et al. 2022. "Schistoscope: An Automated Microscope with Artificial Intelligence for Detection of Schistosoma haematobium Eggs in Resource-Limited Settings" Micromachines 13, no. 5: 643. https://doi.org/10.3390/mi13050643
APA StyleOyibo, P., Jujjavarapu, S., Meulah, B., Agbana, T., Braakman, I., van Diepen, A., Bengtson, M., van Lieshout, L., Oyibo, W., Vdovine, G., & Diehl, J.-C. (2022). Schistoscope: An Automated Microscope with Artificial Intelligence for Detection of Schistosoma haematobium Eggs in Resource-Limited Settings. Micromachines, 13(5), 643. https://doi.org/10.3390/mi13050643