
Reconfigurable Metalens with Phase-Change Switching between Beam Acceleration and Rotation for 3D Depth Imaging


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Results
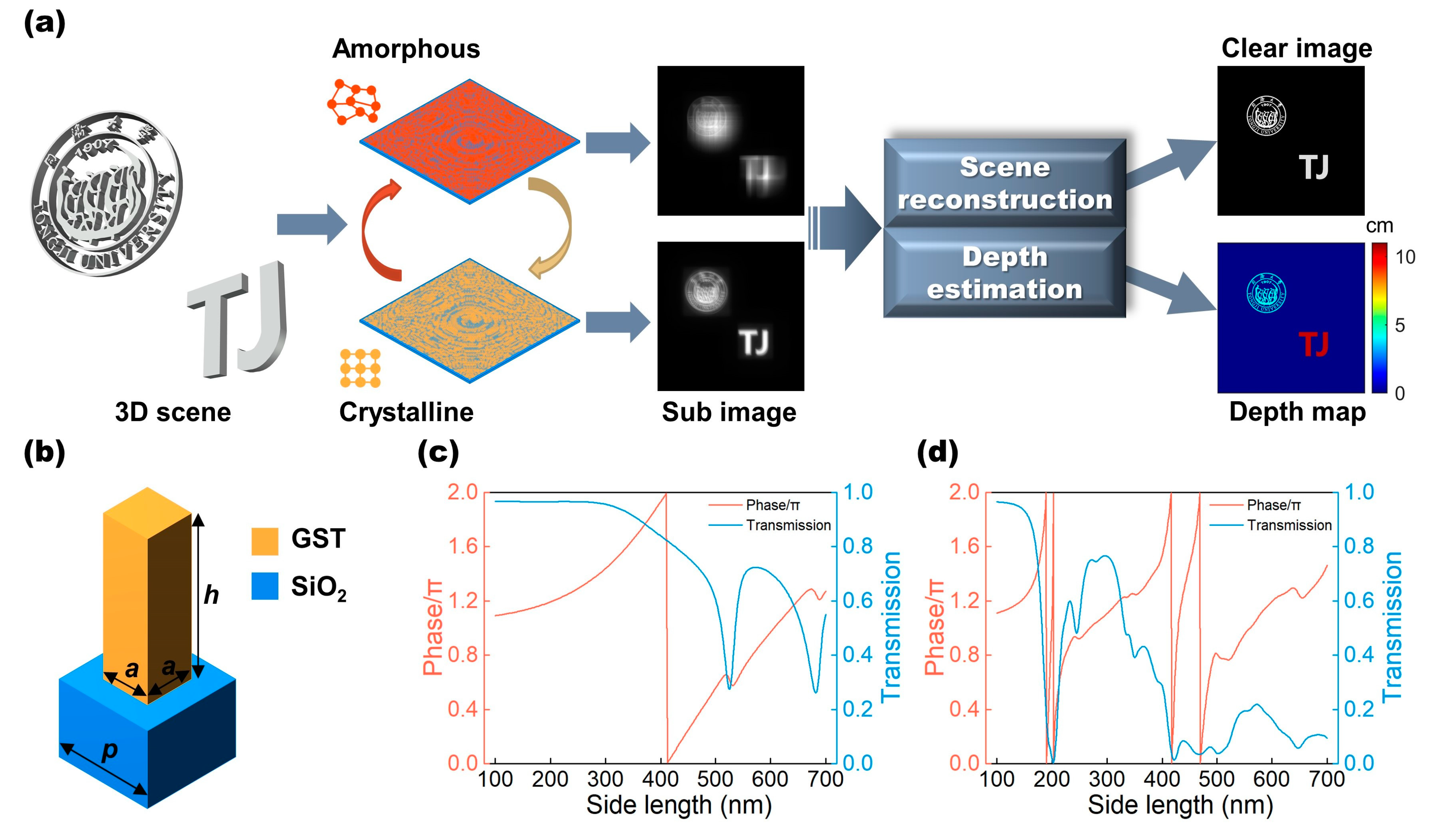
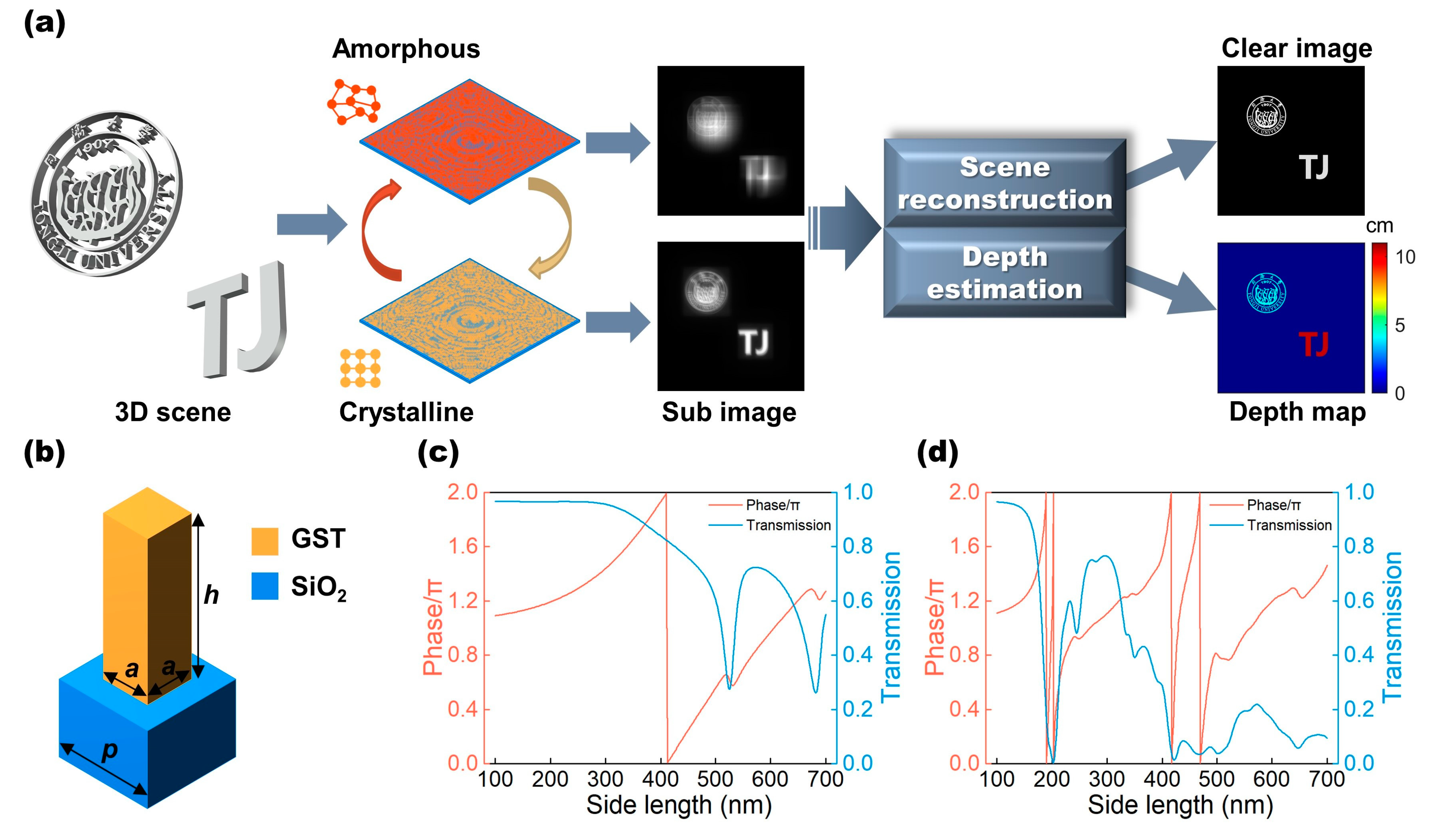
2.1. Design Principle of the Bifunctional Metalens
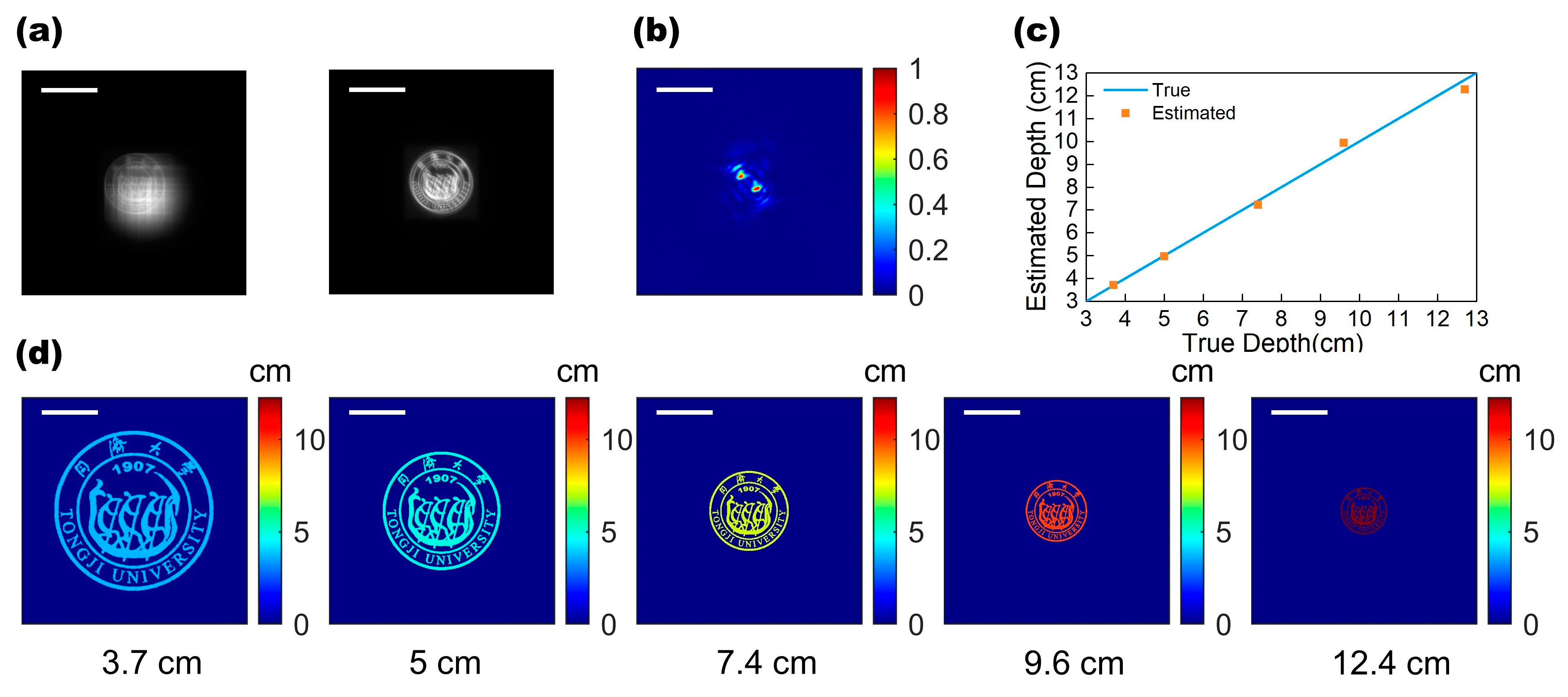
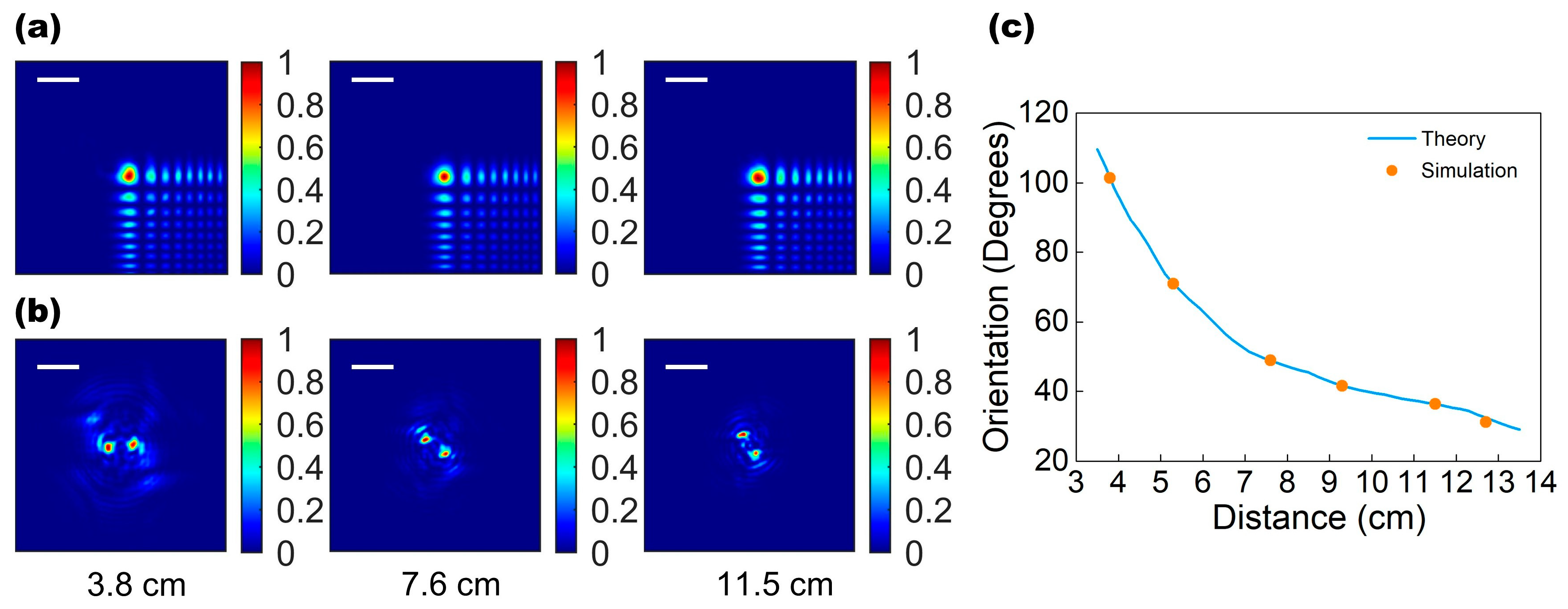
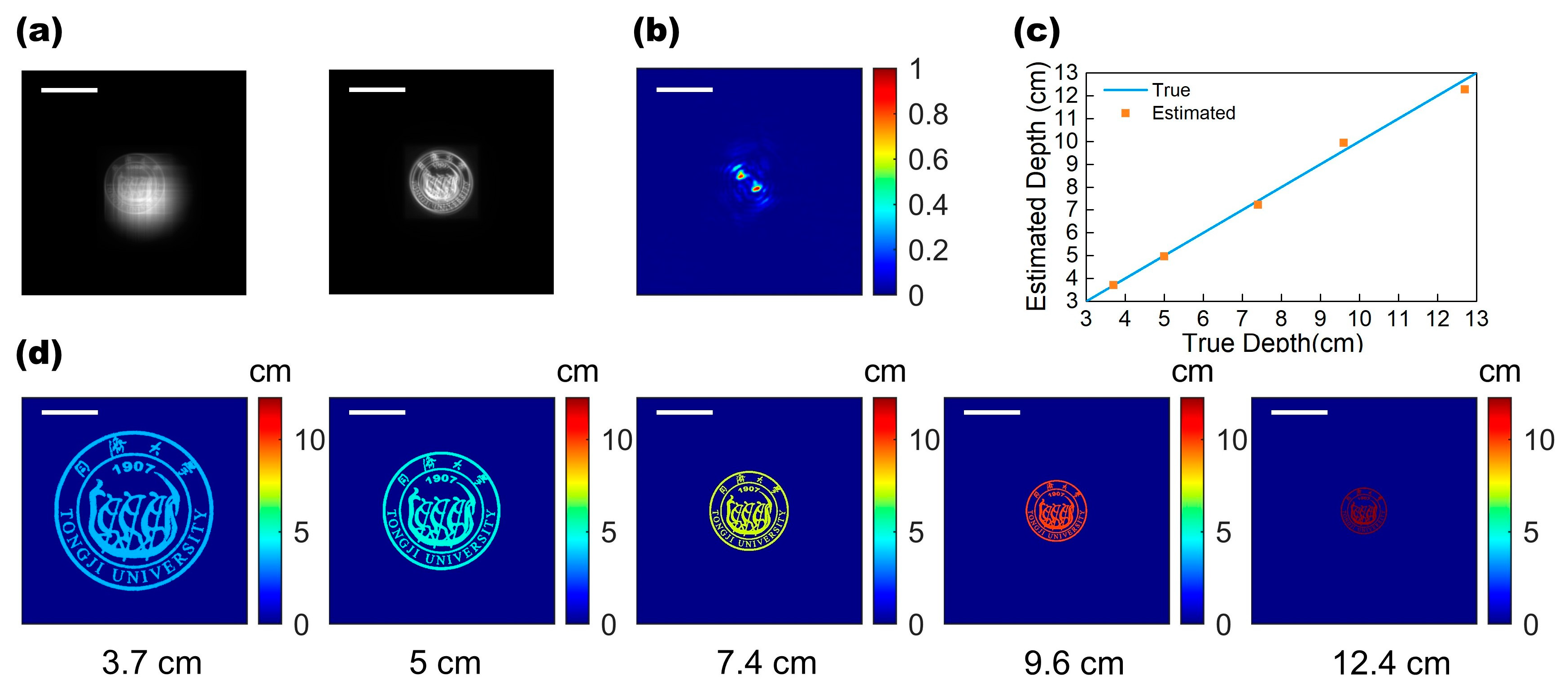
2.2. Depth Imaging Simulation of the Bifunctional Metalens
3. Discussion
4. Conclusions
5. Methods
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Benavidez, P.; Jamshidi, M. Mobile robot navigation and target tracking system. In Proceedings of the 6th International Conference on System of Systems Engineering: SoSE in Cloud Computing, Albuquerque, NM, USA, 27–30 June 2011; pp. 299–304. [Google Scholar]
- Sioma, A. 3D imaging methods in quality inspection systems. In Photonics Applications in Astronomy, Communications, Industry, and High-Energy Physics Experiments 2019; Romaniuk, R.S., Linczuk, M., Eds.; International Society for Optics and Photonics (SPIE): Bellingham, WA, USA, 2019; Volume 11176, pp. 150–159. [Google Scholar]
- Xu, Y.Q.; John, V.; Mita, S.; Tehrani, H.; Ishimaru, K.; Nishino, S. 3D Point Cloud Map Based Vehicle Localization Using Stereo Camera. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 487–492. [Google Scholar]
- Cui, J.Y.; Zhang, H.; Han, H.; Shan, S.G.; Chen, X.L. Improving 2D Face Recognition via Discriminative Face Depth Estimation. In Proceedings of the 2018 International Conference on Biometrics (ICB), Gold Coast, QLD, Australia, 20–23 February 2018; pp. 140–147. [Google Scholar]
- Tan, J.; Boominathan, V.; Baraniuk, R.; Veeraraghavan, A. EDoF-ToF: Extended depth of field time-of-flight imaging. Opt. Express 2021, 29, 38540–38556. [Google Scholar] [CrossRef] [PubMed]
- Lange, R.; Seitz, P. Solid-state time-of-flight range camera. IEEE J. Quantum Electron. 2001, 37, 390–397. [Google Scholar] [CrossRef] [Green Version]
- Javidi, B.; Pla, F.; Sotoca, J.M.; Shen, X.; Latorre-Carmona, P.; Martínez-Corral, M.; Fernández-Beltrán, R.; Krishnan, G. Fundamen-tals of automated human gesture recognition using 3D integral imaging: A tutorial. Adv. Opt. Photon. 2020, 12, 1237–1299. [Google Scholar] [CrossRef]
- Geng, J. Structured-light 3D surface imaging: A tutorial. Adv. Opt. Photon. 2011, 3, 128–160. [Google Scholar] [CrossRef]
- Schechner, Y.Y.; Kiryati, N. Depth from defocus vs. stereo: How different really are they? Int. J. Comput. Vis. 2000, 39, 141–162. [Google Scholar] [CrossRef]
- Pavani, S.R.P.; Thompson, M.A.; Biteen, J.S.; Lord, S.J.; Liu, N.; Twieg, R.J.; Piestun, R.; Moerner, W.E. Three-dimensional, single-molecule fluorescence imaging beyond the diffraction limit by using a double-helix point spread function. Proc. Natl. Acad. Sci. USA 2009, 106, 2995–2999. [Google Scholar] [CrossRef] [Green Version]
- Jin, C.; Zhang, J.; Guo, C. Metasurface integrated with double-helix point spread function and metalens for three-dimensional imaging. Nanophotonics 2019, 8, 451–458. [Google Scholar] [CrossRef]
- Greengard, A.; Schechner, Y.Y.; Piestun, R. Depth from diffracted rotation. Opt. Lett. 2006, 31, 181–183. [Google Scholar] [CrossRef] [Green Version]
- Pavani, S.R.P.; Piestun, R. High-efficiency rotating point spread functions. Opt. Express 2008, 16, 3484–3489. [Google Scholar] [CrossRef]
- Li, H.; Wang, F.; Wei, T.; Miao, X.; Cheng, Y.; Pang, X.; Jiang, K.; Huang, W.; Zhang, Y. Particles 3D tracking with large axial depth by using the 2π-DH-PSF. Opt. Lett. 2021, 46, 5088–5091. [Google Scholar] [CrossRef]
- Quirin, S.; Piestun, R. Depth estimation and image recovery using broadband, incoherent illumination with engineered point spread functions [Invited]. Appl. Opt. 2013, 52, A367–A376. [Google Scholar] [CrossRef] [PubMed]
- Pavani, S.R.P.; DeLuca, J.G.; Piestun, R. Polarization sensitive, three-dimensional, single-molecule imaging of cells with a double-helix system. Opt. Express 2009, 17, 19644–19655. [Google Scholar] [CrossRef] [PubMed]
- Pavani, S.R.P.; Piestun, R. Three dimensional tracking of fluorescent microparticles using a photon-limited double-helix re-sponse system. Opt. Express 2008, 16, 22048–22057. [Google Scholar] [CrossRef] [PubMed]
- Thompson, M.A.; Lew, M.D.; Badieirostami, M.; Moerner, W.E. Localizing and Tracking Single Nanoscale Emitters in Three Dimensions with High Spatiotemporal Resolution Using a Double-Helix Point Spread Function. Nano Lett. 2010, 10, 211–218. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Conkey, D.B.; Trivedi, R.P.; Pavani, S.R.P.; Smalyukh, I.I.; Piestun, R. Three-dimensional parallel particle manipulation and tracking by integrating holographic optical tweezers and engineered point spread functions. Opt. Express 2011, 19, 3835–3842. [Google Scholar] [CrossRef] [PubMed]
- Yu, N.F.; Capasso, F. Flat optics with designer metasurfaces. Nat. Mater. 2014, 13, 139–150. [Google Scholar] [CrossRef]
- Kildishev, A.V.; Boltasseva, A.; Shalaev, V.M. Planar Photonics with Metasurfaces. Science 2013, 339, 1232009. [Google Scholar] [CrossRef] [Green Version]
- Yu, N.F.; Genevet, P.; Kats, M.A.; Aieta, F.; Tetienne, J.P.; Capasso, F.; Gaburro, Z. Light Propagation with Phase Discontinui-ties: Generalized Laws of Reflection and Refraction. Science 2011, 334, 333–337. [Google Scholar] [CrossRef] [Green Version]
- Zhou, S.; Xi, K.; Zhuang, S.; Cheng, Q. Spherical Aberration-Corrected Metalens for Polarization Multiplexed Imaging. Nanomaterials 2021, 11, 2774. [Google Scholar] [CrossRef]
- Cheng, Q.; Wang, J.; Ma, L.; Shen, Z.; Zhang, J.; Zheng, X.; Chen, T.; Yu, Y.; Yu, D.; He, Q.; et al. Achromatic terahertz Airy beam generation with dielectric metasurfaces. Nanophotonics 2021, 10, 1123–1131. [Google Scholar] [CrossRef]
- Cheng, Q.; Ma, M.; Yu, D.; Shen, Z.; Xie, J.; Wang, J.; Xu, N.; Guo, H.; Hu, W.; Wang, S.; et al. Broadband achromatic metalens in terahertz regime. Sci. Bull. 2019, 64, 1525–1531. [Google Scholar] [CrossRef] [Green Version]
- Lin, R.J.; Su, V.C.; Wang, S.M.; Chen, M.K.; Chung, T.L.; Chen, Y.H.; Kuo, H.Y.; Chen, J.W.; Chen, J.; Huang, Y.T.; et al. Achromatic metalens array for full-colour light-field im-aging. Nat. Nanotechnol. 2019, 14, 227–231. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.J.; Kim, C.; Kim, Y.; Jeong, J.; Choi, S.; Han, W.; Kim, J.; Lee, B. Dielectric Metalens: Properties and Three-Dimensional Imaging Applications. Sensors 2021, 21, 4584. [Google Scholar] [CrossRef]
- Guo, Q.; Shi, Z.J.; Huang, Y.W.; Alexander, E.; Qiu, C.W.; Capasso, F.; Zickler, T. Compact single-shot metalens depth sensors inspired by eyes of jumping spiders. Proc. Natl. Acad. Sci. USA 2019, 116, 22959–22965. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, C.; Song, W.; Chen, J.-W.; Wang, J.-H.; Chen, Y.H.; Xu, B.; Chen, M.-K.; Li, H.; Fang, B.; Chen, J.; et al. Spectral Tomographic Imaging with Aplanatic Metalens. Light Sci. Appl. 2019, 8, 99. [Google Scholar] [CrossRef] [Green Version]
- Colburn, S.; Majumdar, A. Metasurface Generation of Paired Accelerating and Rotating Optical Beams for Passive Ranging and Scene Reconstruction. ACS Photonics 2020, 7, 1529–1536. [Google Scholar] [CrossRef]
- Shaltout, A.M.; Shalaev, V.M.; Brongersma, M.L. Spatiotemporal light control with active metasurfaces. Science 2019, 364. [Google Scholar] [CrossRef]
- Huang, Y.W.; Lee, H.W.H.; Sokhoyan, R.; Pala, R.A.; Thyagarajan, K.; Han, S.; Tsai, D.P.; Atwater, H.A. Gate-Tunable Con-ducting Oxide Metasurfaces. Nano Lett. 2016, 16, 5319–5325. [Google Scholar] [CrossRef] [Green Version]
- Park, J.; Kang, J.H.; Kim, S.J.; Liu, X.G.; Brongersma, M.L. Dynamic Reflection Phase and Polarization Control in Metasurfaces. Nano Lett. 2017, 17, 407–413. [Google Scholar] [CrossRef]
- Alam, M.Z.; Schulz, S.A.; Upham, J.; De Leon, I.; Boyd, R.W. Large optical nonlinearity of nanoantennas coupled to an epsilon-near-zero material. Nat. Photonics 2018, 12, 79–83. [Google Scholar] [CrossRef] [Green Version]
- He, J.W.; Xie, Z.W.; Sun, W.F.; Wang, X.K.; Ji, Y.D.; Wang, S.; Lin, Y.; Zhang, Y. Terahertz Tunable Metasurface Lens Based on Vanadium Dioxide Phase Transition. Plasmonics 2016, 11, 1285–1290. [Google Scholar] [CrossRef]
- Colburn, S.; Zhan, A.; Majumdar, A. Metasurface optics for full-color computational imaging. Sci. Adv. 2018, 4, eaar2114. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fan, Q.; Liu, M.; Yang, C.; Yu, L.; Yan, F.; Xu, T. A high numerical aperture, polarization-insensitive metalens for long-wavelength infrared imaging. Appl. Phys. Lett. 2018, 113, 201104. [Google Scholar] [CrossRef]
- Zhan, A.; Colburn, S.; Dodson, C.M.; Majumdar, A. Metasurface Freeform Nanophotonics. Sci. Rep. 2017, 7, 1673. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.J.; Cai, Y.N.; Liang, Y.S.; Dan, D.; Yao, B.L.; Lei, M. Aberration correction method based on double-helix point spread function. J. Biomed. Opt. 2019, 24, 031005. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.J.; Cai, Y.N.; Liang, Y.S.; Zhou, X.; Yan, S.H.; Dan, D.; Bianco, P.R.; Lei, M.; Yao, B.L. Single shot, three-dimensional fluorescence microscopy with a spatially rotating point spread function. Biomed. Opt. Express 2017, 8, 5493–5506. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Xie, Z.; He, H.; Zhang, Q.; Li, J.; Zhang, Y.; Yuan, X. Switchable imaging between edge-enhanced and bright-field based on a phase-change metasurface. Opt. Lett. 2021, 46, 3741–3744. [Google Scholar] [CrossRef]
- Chu, C.H.; Tseng, M.L.; Chen, J.; Wu, P.C.; Chen, Y.H.; Wang, H.C.; Chen, T.Y.; Hsieh, W.T.; Wu, H.J.; Sun, G.; et al. Active dielectric metasurface based on phase-change medium. Laser Photonics Rev. 2016, 10, 986–994. [Google Scholar] [CrossRef]
- Wang, Q.; Rogers, E.T.F.; Gholipour, B.; Wang, C.M.; Yuan, G.H.; Teng, J.H.; Zheludev, N.I. Optically reconfigurable metasurfaces and photonic devices based on phase change materials. Nat. Photon. 2016, 10, 60–65. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Zhou, C.; Ban, G.; Wang, H.; Lu, H.; Wang, Y. Active all-dielectric bifocal metalens assisted by germanium antimony telluride. J. Phys. D Appl. Phys. 2019, 52, 095106. [Google Scholar] [CrossRef]
- Shalaginov, M.Y.; An, S.; Zhang, Y.; Yang, F.; Su, P.; Liberman, V.; Chou, J.B.; Roberts, C.M.; Kang, M.; Rios, C.; et al. Reconfigurable all-dielectric metalens with diffraction-limited performance. Nat. Commun. 2021, 12, 1225. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.Q.; Wang, X.D.; Luo, X.H.; Ou, X.N.; Li, L.; Chen, Y.Q.; Yang, P.; Wang, S.; Duan, H.G. All-dielectric metasurfaces for polarization manipulation: Principles and emerging applications. Nanophotonics 2020, 9, 3755–3780. [Google Scholar] [CrossRef]
- Wang, S.; Wu, P.C.; Su, V.-C.; Lai, Y.-C.; Chen, M.-K.; Kuo, H.Y.; Chen, B.H.; Chen, Y.H.; Huang, T.-T.; Wang, J.-H.; et al. A broadband achromatic metalens in the visible. Nat. Nanotechnol. 2018, 13, 227–232. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.T.; Dong, F.L.; Wang, B.; Gan, F.Y.; Chen, J.J.; Song, Z.W.; Xu, L.X.; Chu, W.G.; Xiao, Y.F.; Gong, Q.H.; et al. Polariza-tion-independent and high-efficiency dielectric metasurfaces for visible light. Opt. Express 2016, 24, 16309–16319. [Google Scholar] [CrossRef]
- Ou, K.; Li, G.; Li, T.; Yang, H.; Yu, F.; Chen, J.; Zhao, Z.; Cao, G.; Chen, X.; Lu, W. High efficiency focusing vortex generation and detection with polarization-insensitive dielectric metasurfaces. Nanoscale 2018, 10, 19154–19161. [Google Scholar] [CrossRef]
- Colburn, S.; Zhan, A.; Majumdar, A. Varifocal zoom imaging with large area focal length adjustable metalenses. Optica 2018, 5, 825–831. [Google Scholar] [CrossRef]
- Choi, C.; Lee, S.-Y.; Mun, S.-E.; Lee, G.-Y.; Sung, J.; Yun, H.; Yang, J.-H.; Kim, H.-O.; Hwang, C.-Y.; Lee, B. Metasurface with Nanostructured Ge2Sb2Te5 as a Platform for Broadband-Operating Wavefront Switch. Adv. Opt. Mater. 2019, 7, 1900171. [Google Scholar] [CrossRef]
- Bai, W.; Yang, P.; Huang, J.; Chen, D.; Zhang, J.; Zhang, Z.; Yang, J.; Xu, B. Near-infrared tunable metalens based on phase change material Ge2Sb2Te5. Sci. Rep. 2019, 9, 5368. [Google Scholar] [CrossRef] [Green Version]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Z.; Dong, S.; Dun, X.; Wei, Z.; Wang, Z.; Cheng, X. Reconfigurable Metalens with Phase-Change Switching between Beam Acceleration and Rotation for 3D Depth Imaging. Micromachines 2022, 13, 607. https://doi.org/10.3390/mi13040607
Ma Z, Dong S, Dun X, Wei Z, Wang Z, Cheng X. Reconfigurable Metalens with Phase-Change Switching between Beam Acceleration and Rotation for 3D Depth Imaging. Micromachines. 2022; 13(4):607. https://doi.org/10.3390/mi13040607
Chicago/Turabian StyleMa, Zhiyuan, Siyu Dong, Xiong Dun, Zeyong Wei, Zhanshan Wang, and Xinbin Cheng. 2022. "Reconfigurable Metalens with Phase-Change Switching between Beam Acceleration and Rotation for 3D Depth Imaging" Micromachines 13, no. 4: 607. https://doi.org/10.3390/mi13040607
APA StyleMa, Z., Dong, S., Dun, X., Wei, Z., Wang, Z., & Cheng, X. (2022). Reconfigurable Metalens with Phase-Change Switching between Beam Acceleration and Rotation for 3D Depth Imaging. Micromachines, 13(4), 607. https://doi.org/10.3390/mi13040607