
Design and Analysis of a Light-Operated Microgripper Using an Opto-Electrostatic Repulsive Combined Actuator

Abstract
:1. Introduction
2. Opto-Electrostatic Repulsive Combined Driving Model
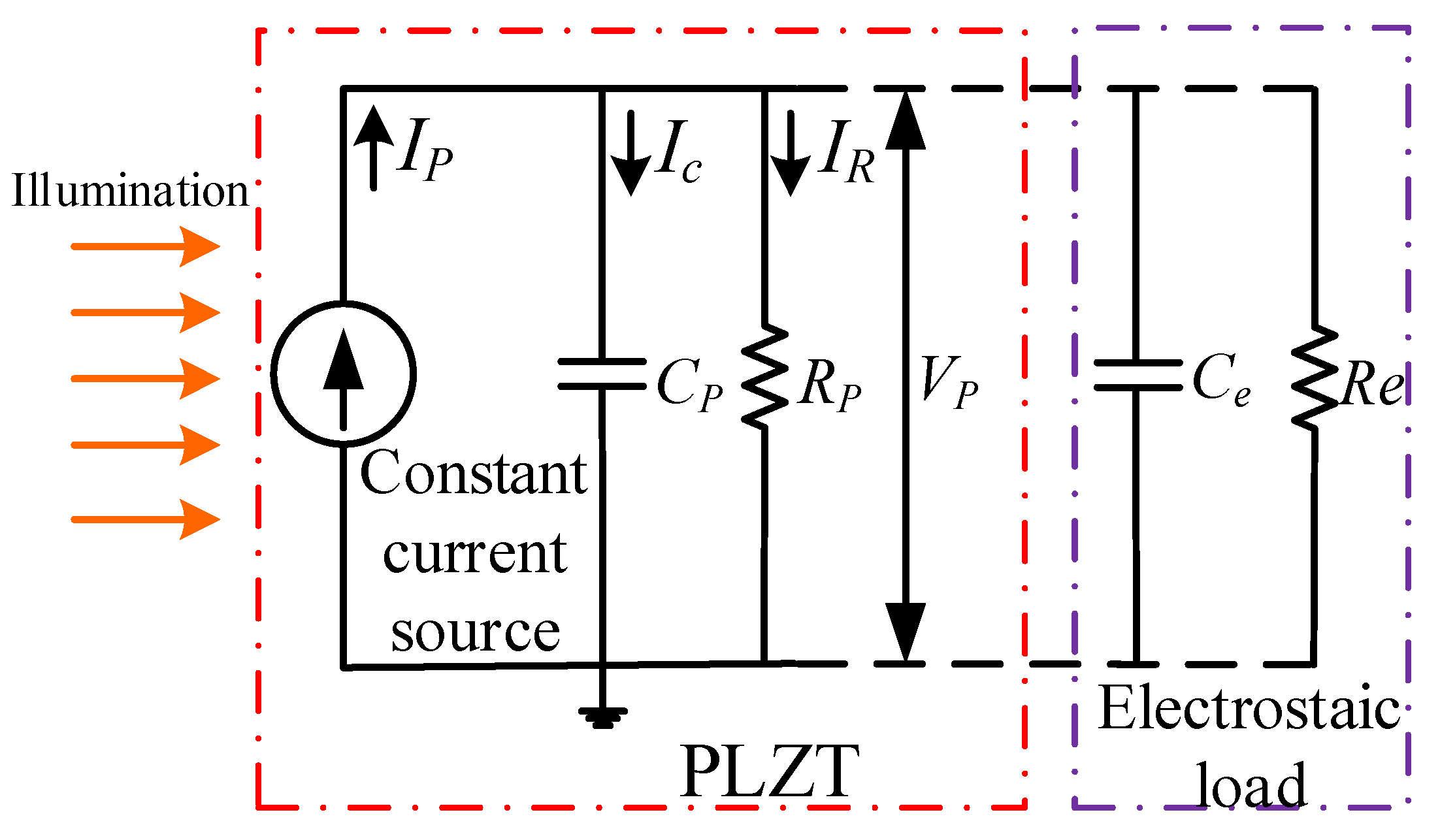
2.1. The Model of Photo-Induced Electrical Field with Loads
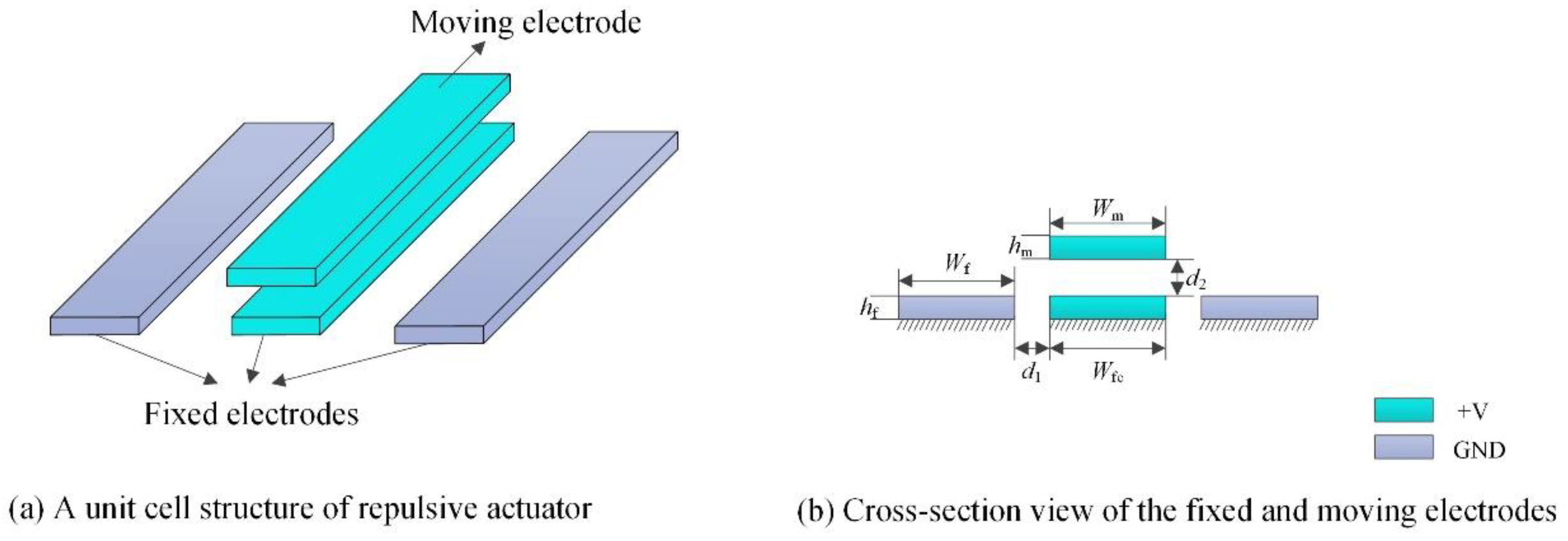
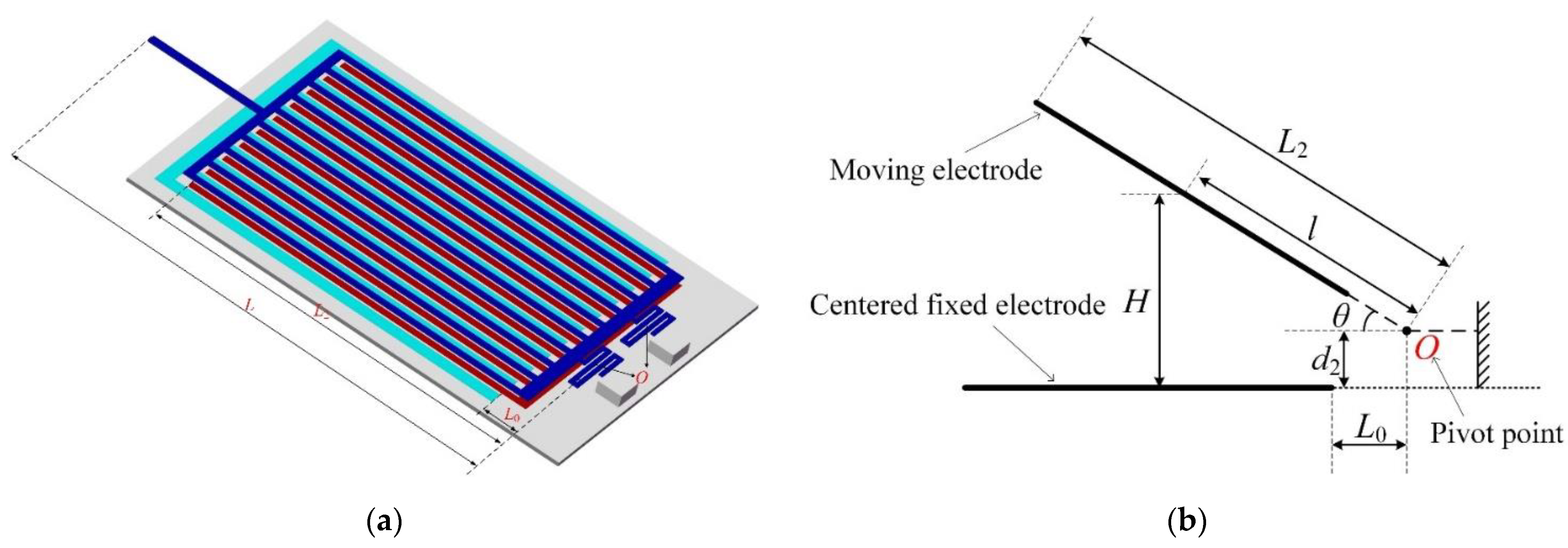
2.2. The Model of Electrostatic Repulsive Actuator
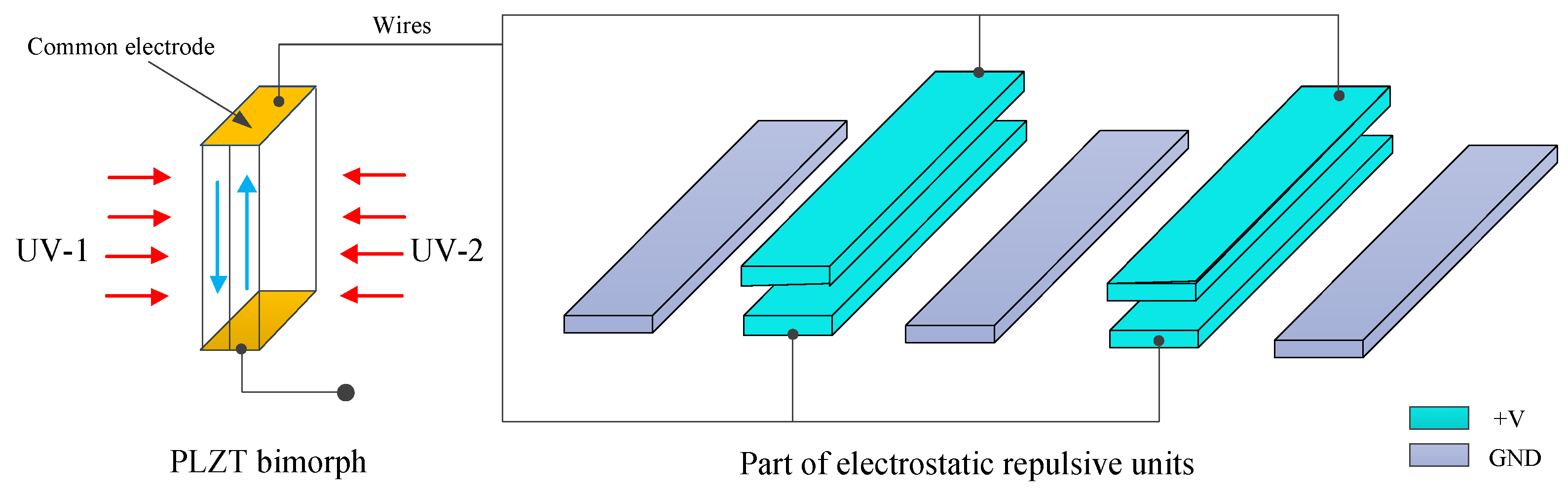
3. Design and Working Principle of the Light-Operated Microgripper
3.1. The Structure Simulation of Electrostatic Repulsive Elementary Cell
3.1.1. Electrostatic Repulsive Force versus the Applied Voltage V
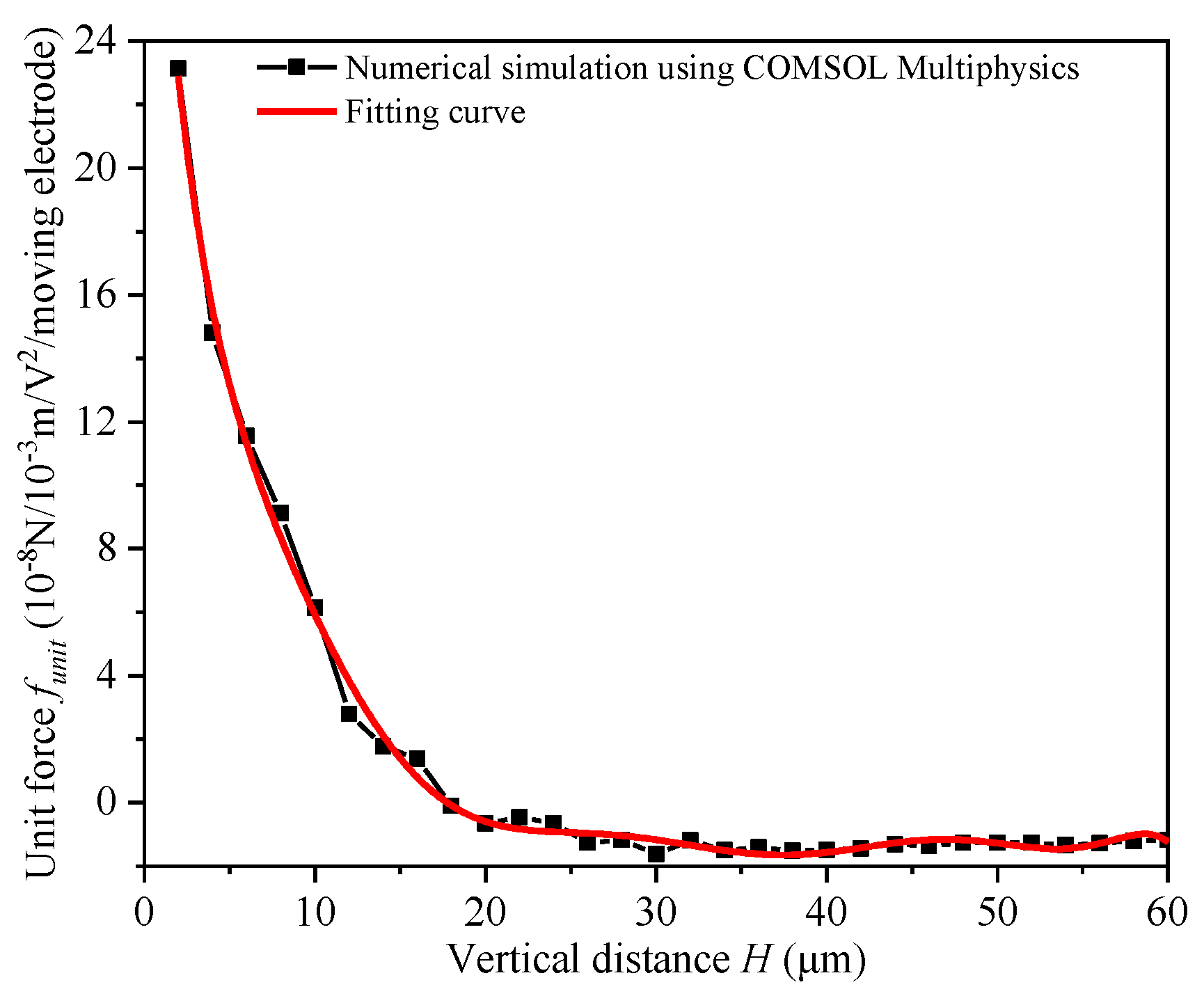
3.1.2. Electrostatic Repulsive Force versus the Vertical Distance d2
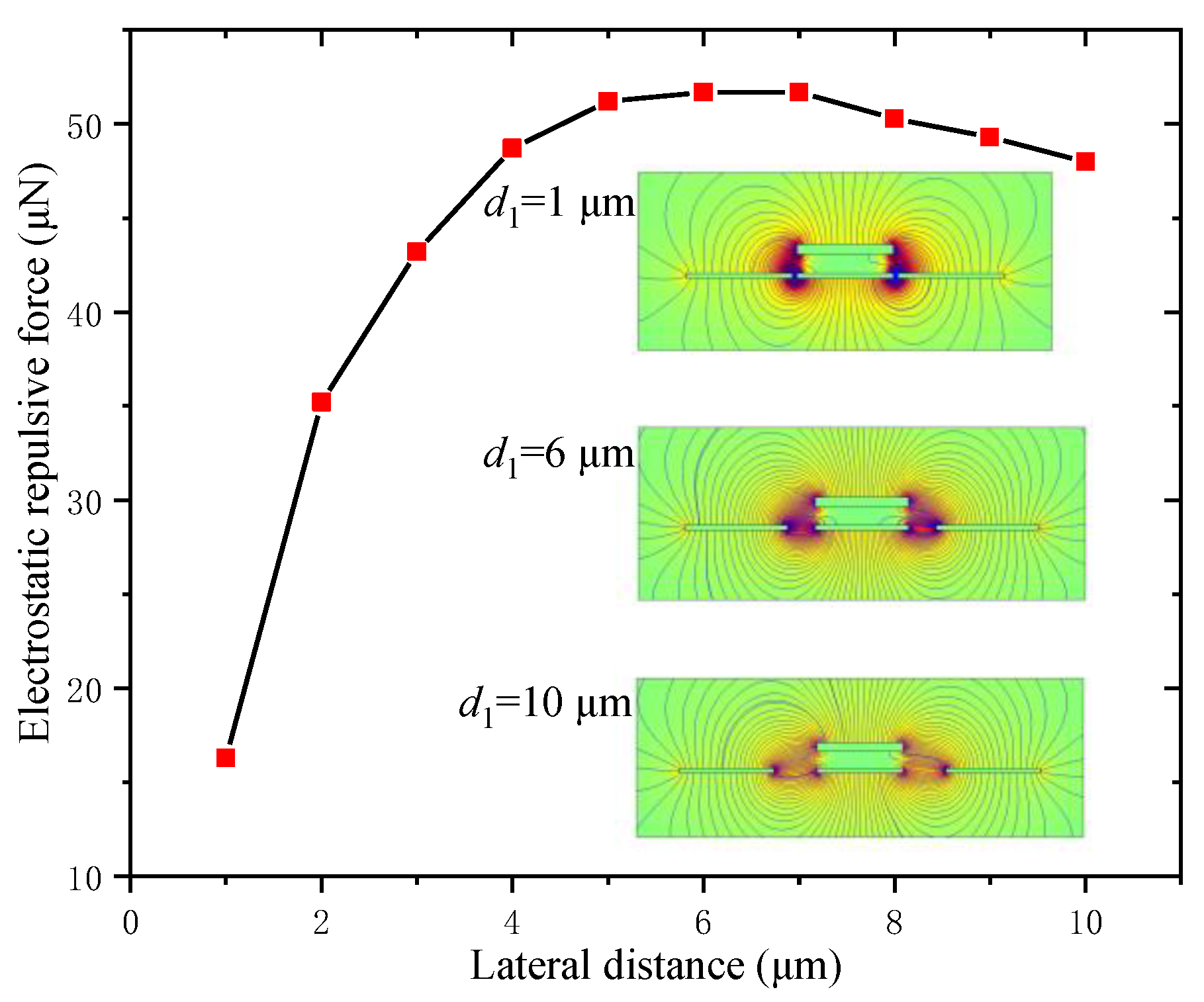
3.1.3. Electrostatic Repulsive Force versus the Lateral Distance d1
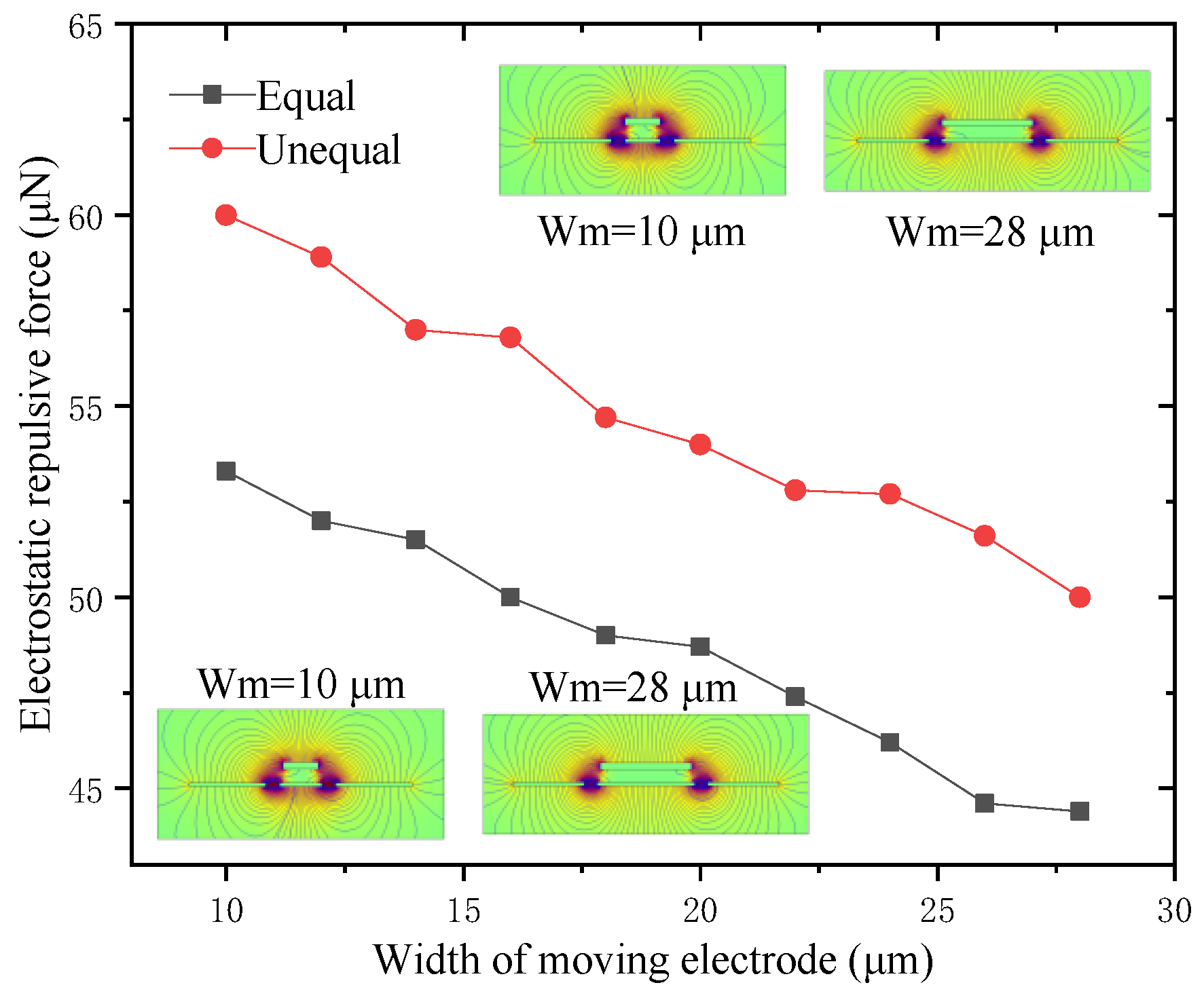
3.1.4. Electrostatic Repulsive Force versus the Width of the Moving Electrode Wm
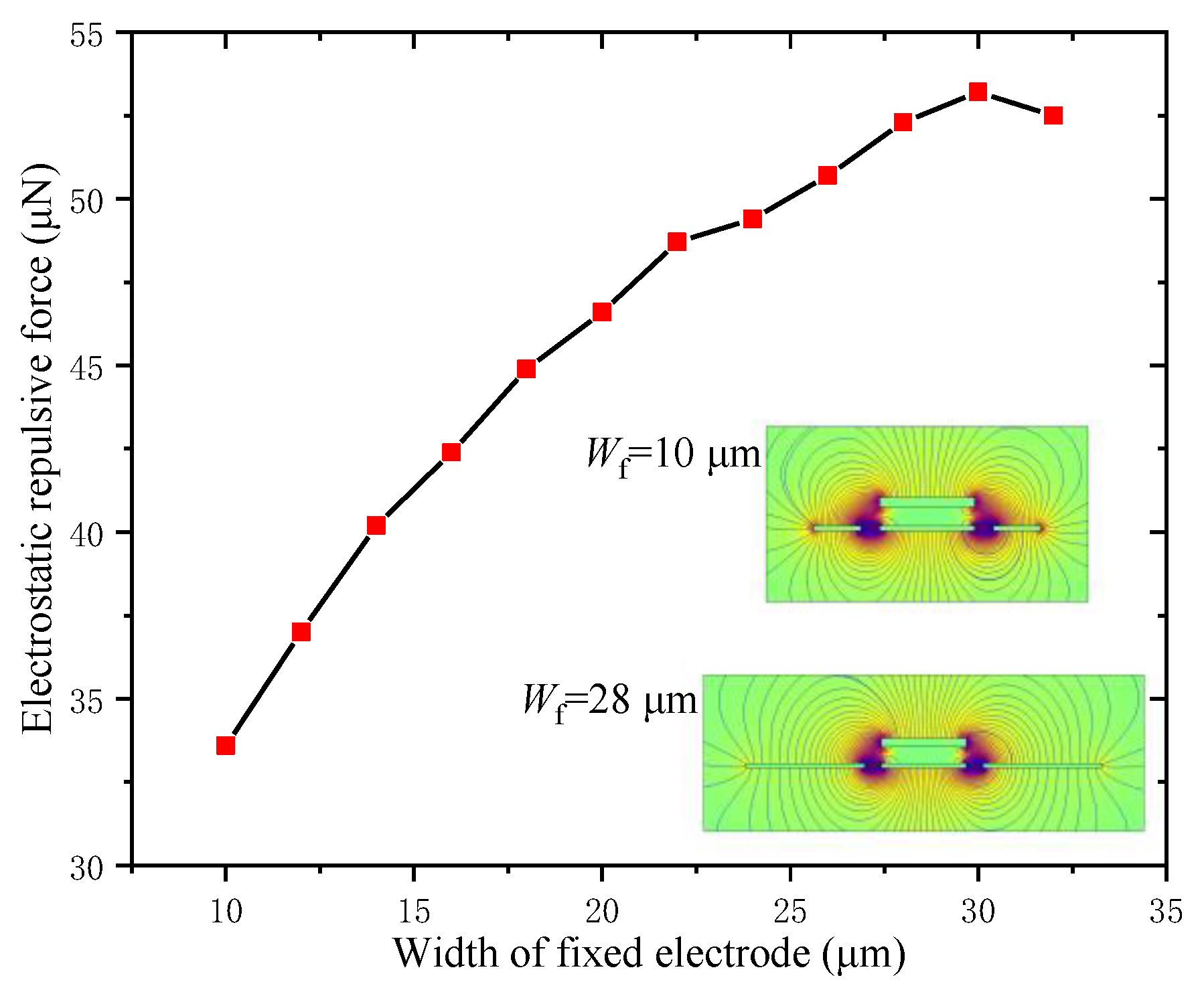
3.1.5. Electrostatic Repulsive Force versus the Width of the Fixed Electrode Wf
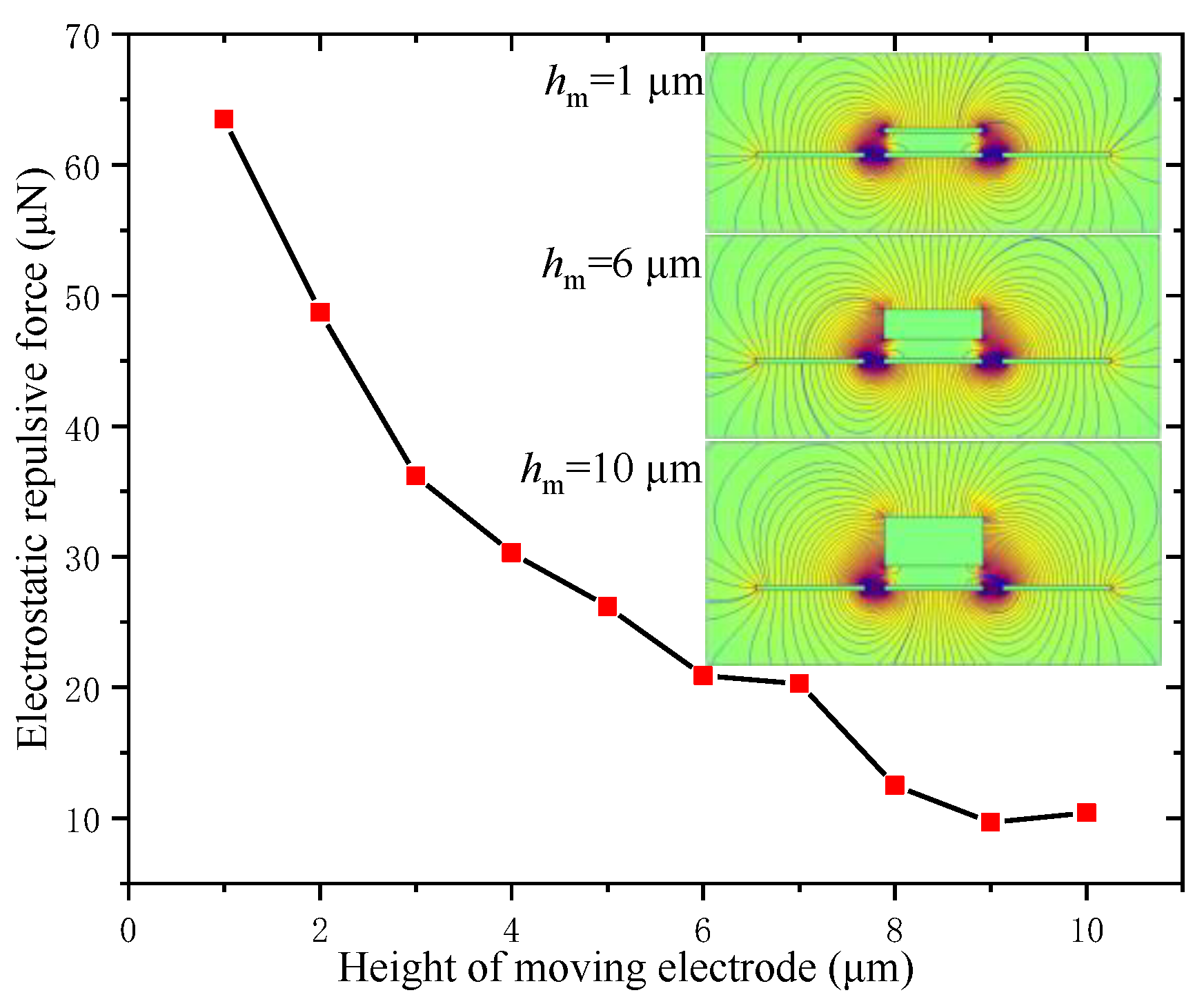
3.1.6. Electrostatic Repulsive Force versus the Height of the Moving Electrode hm
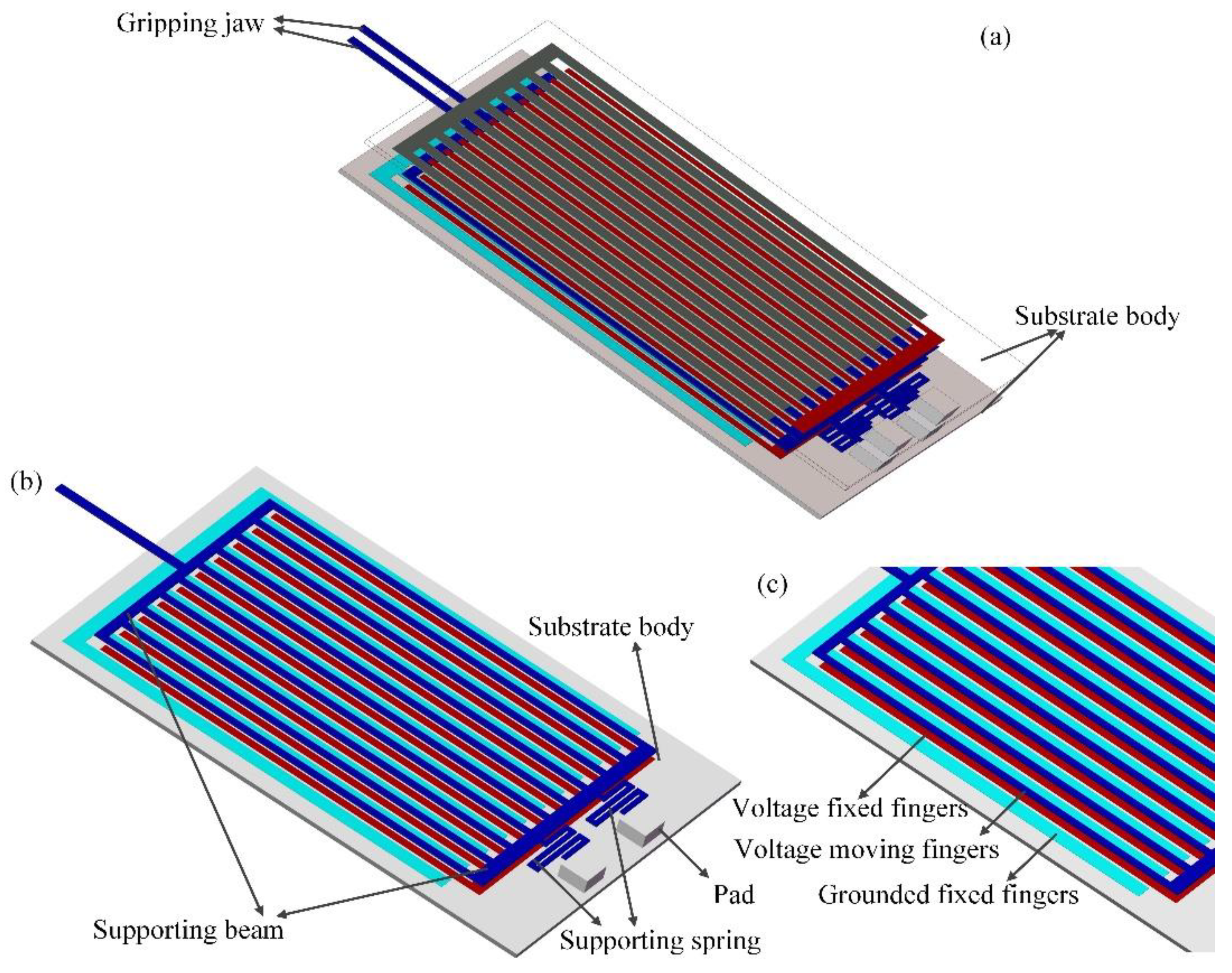
3.2. The Structure Design of Microgripper
3.2.1. Principle of Operation
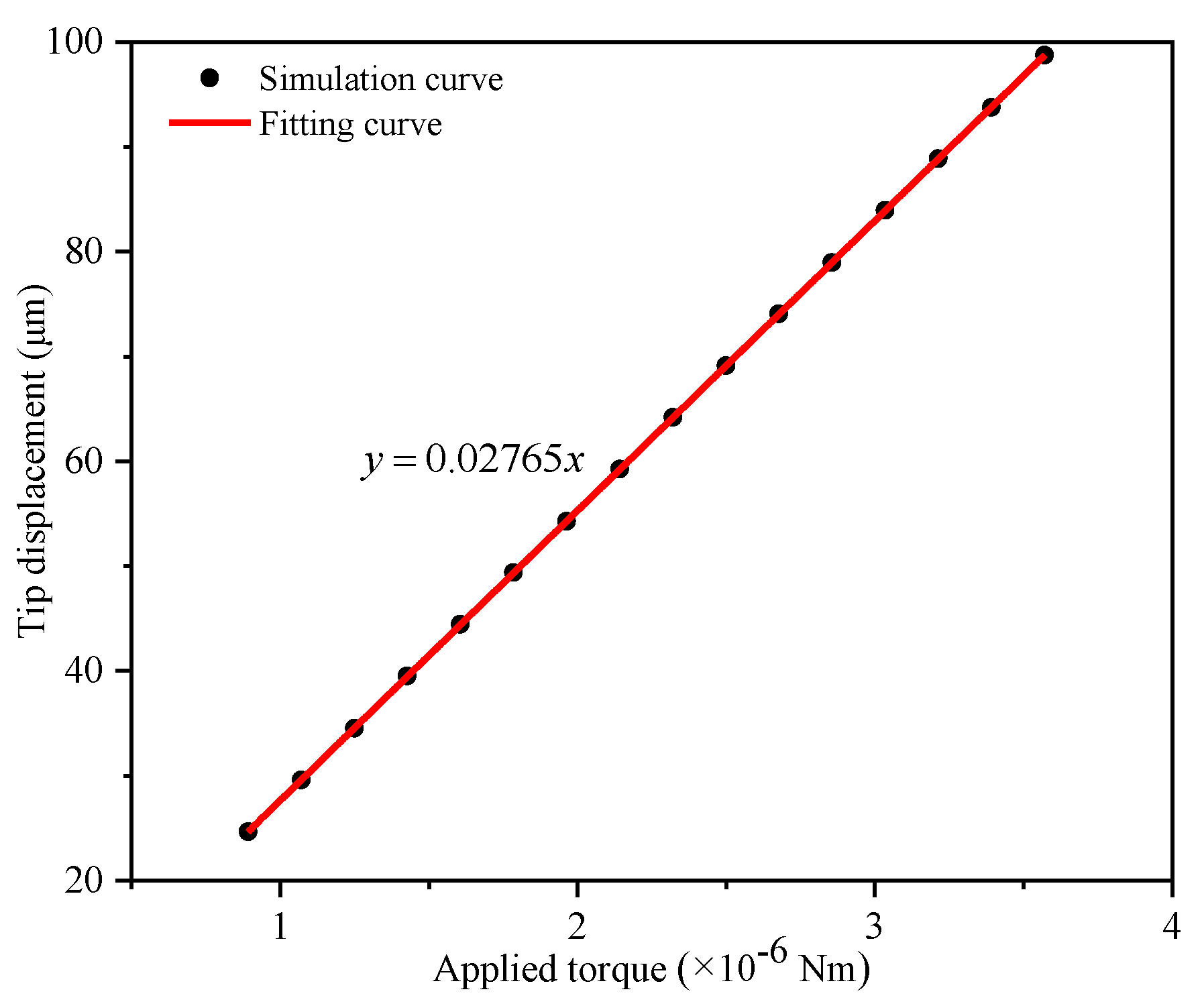
3.2.2. The Output Displacement Model of the Microgripper
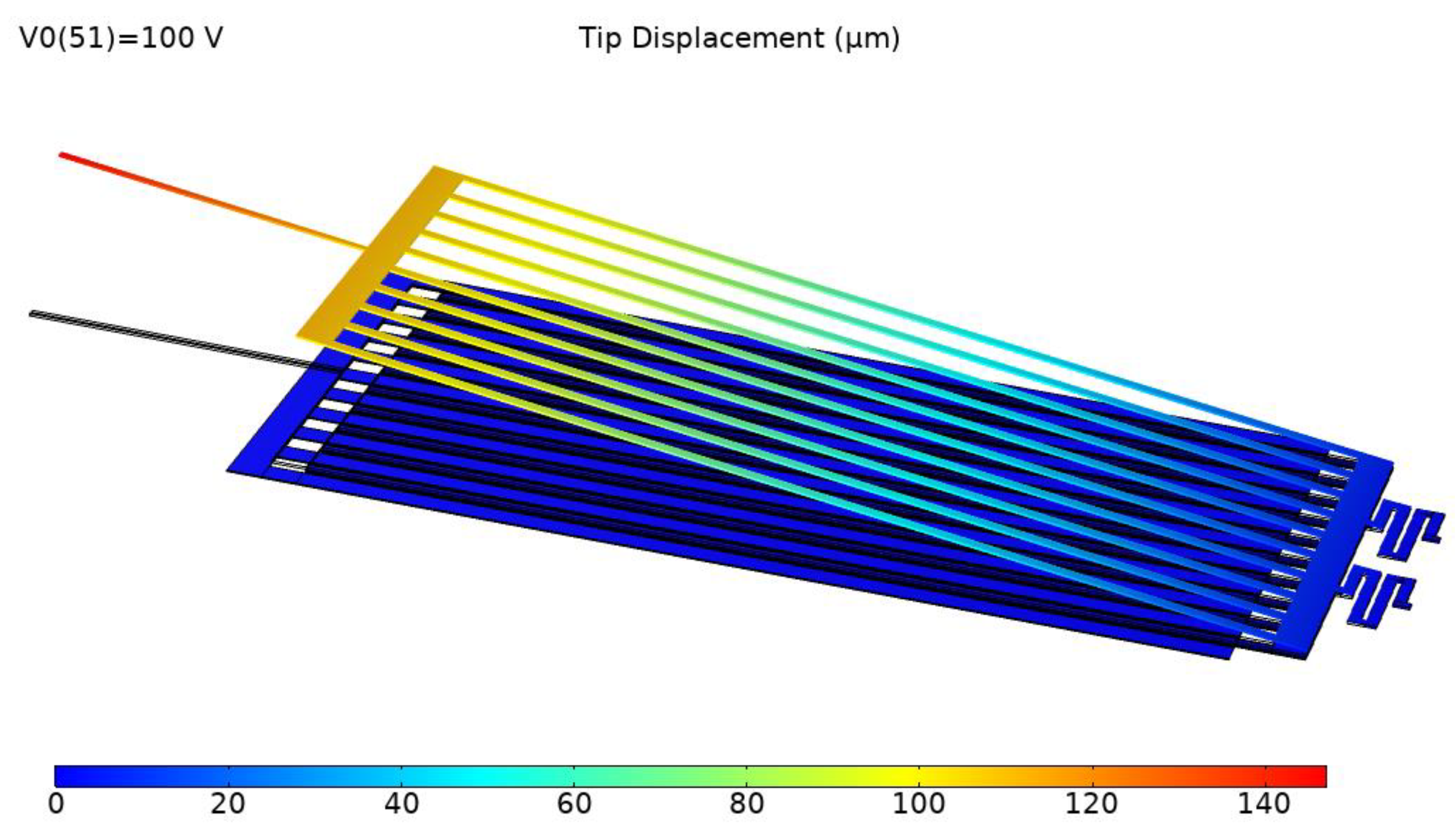
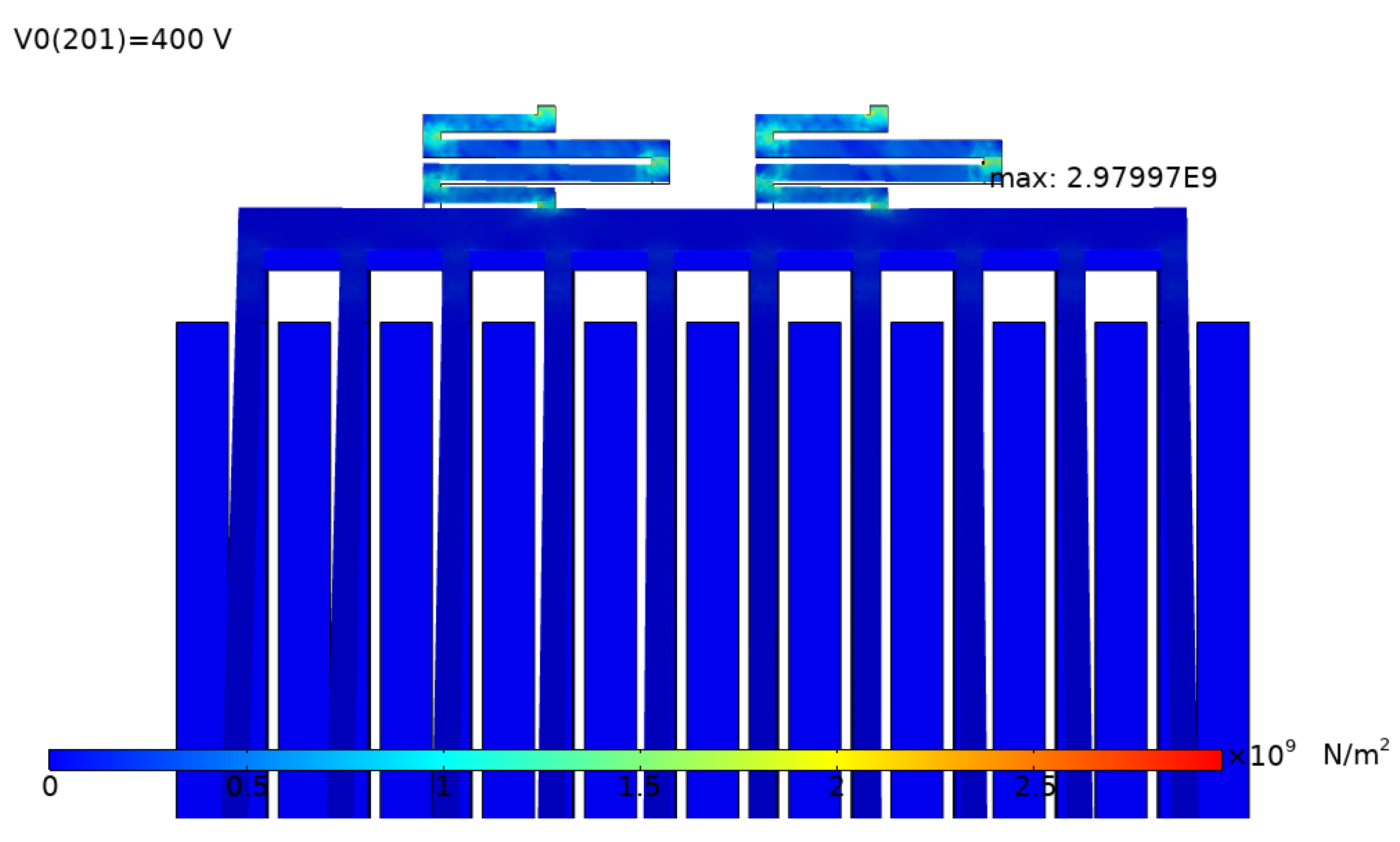
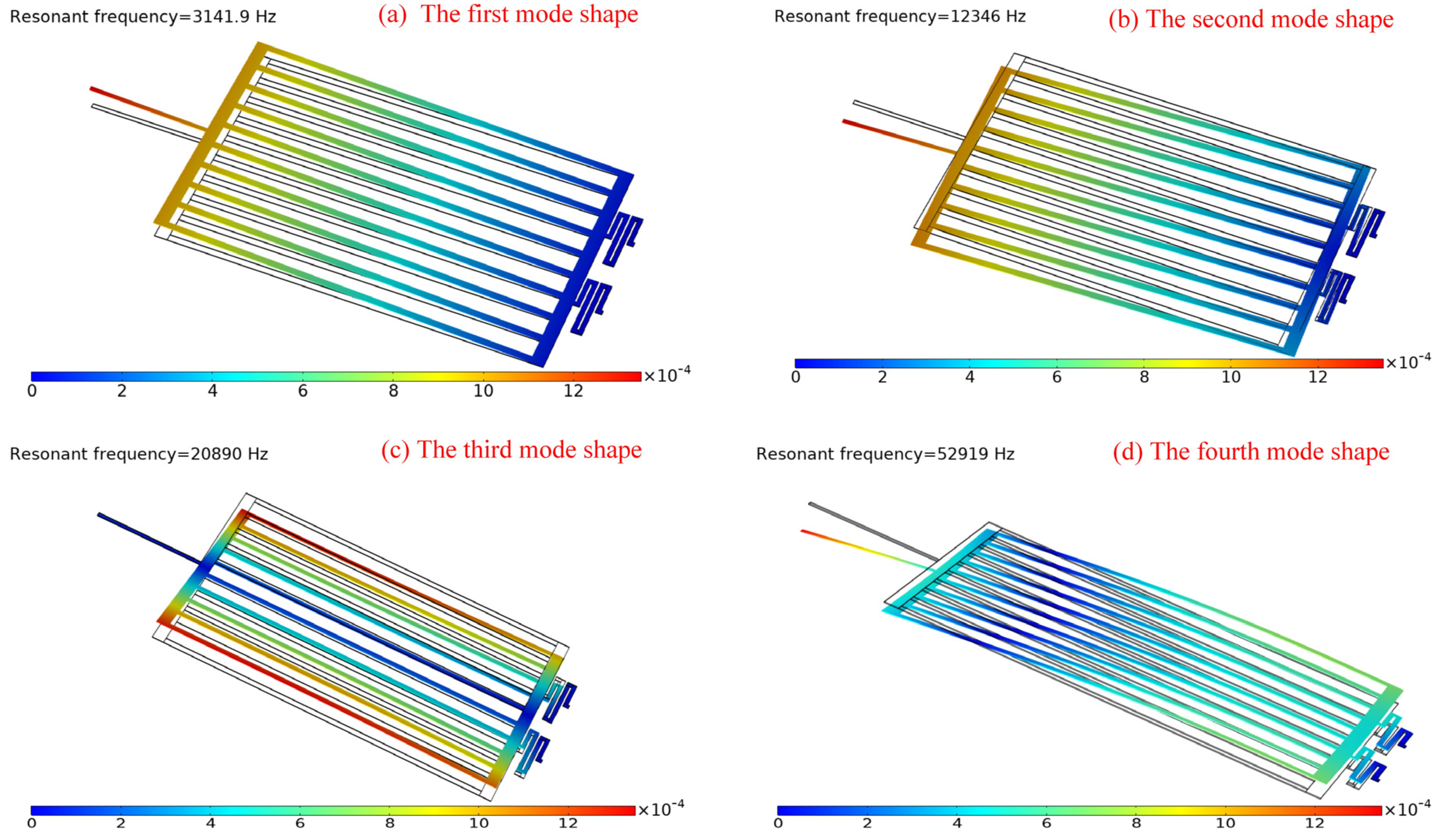
3.2.3. FEA of the Microgripper
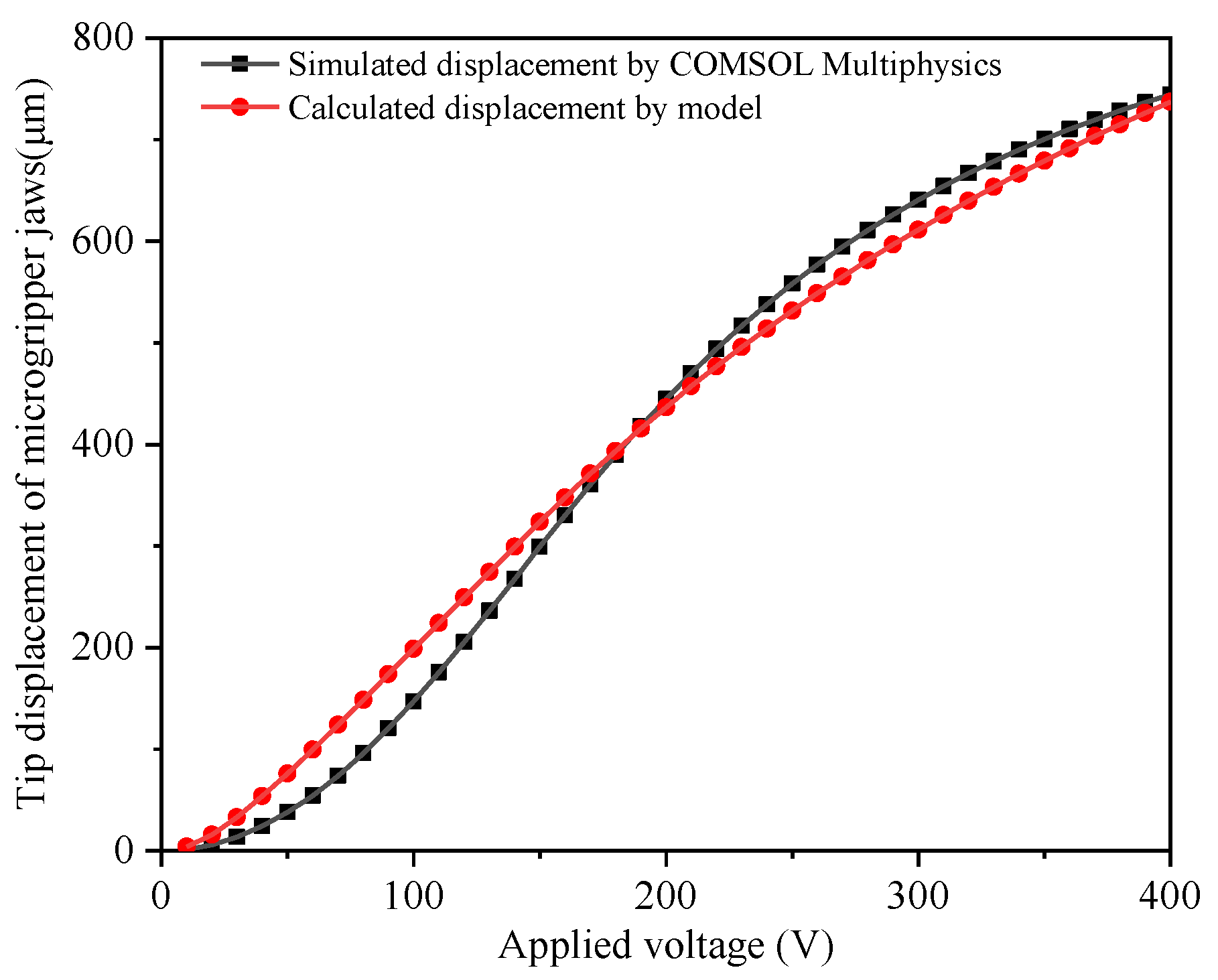
3.3. Static Manipulation Performance of the Light-Operated Microgripper
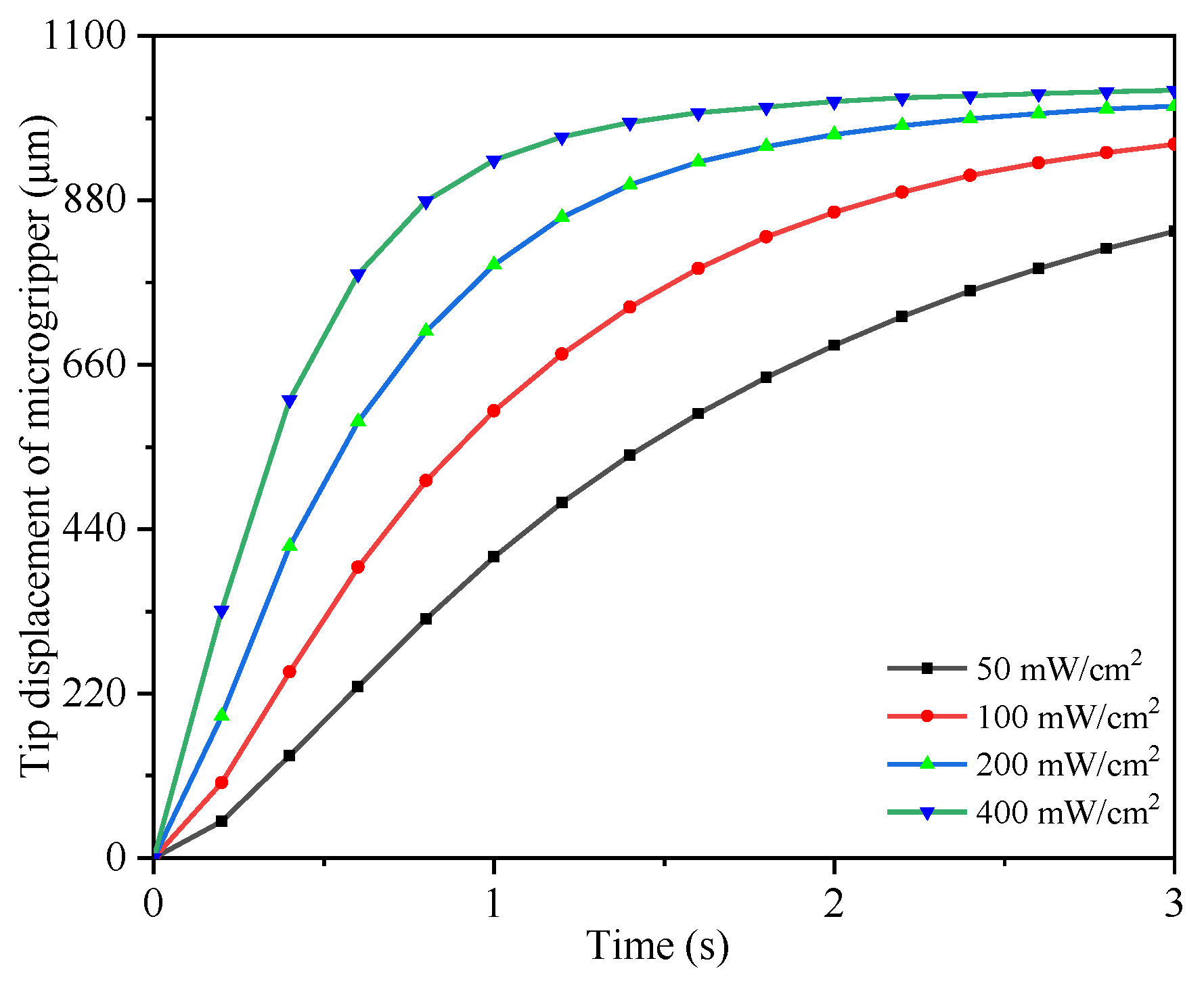
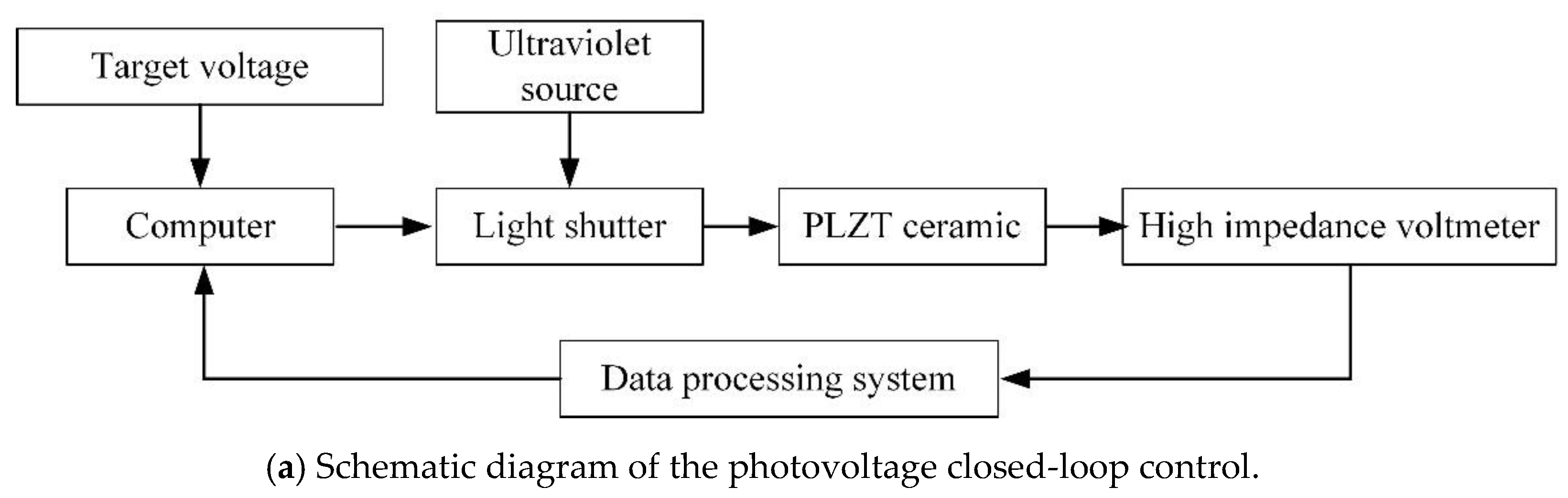
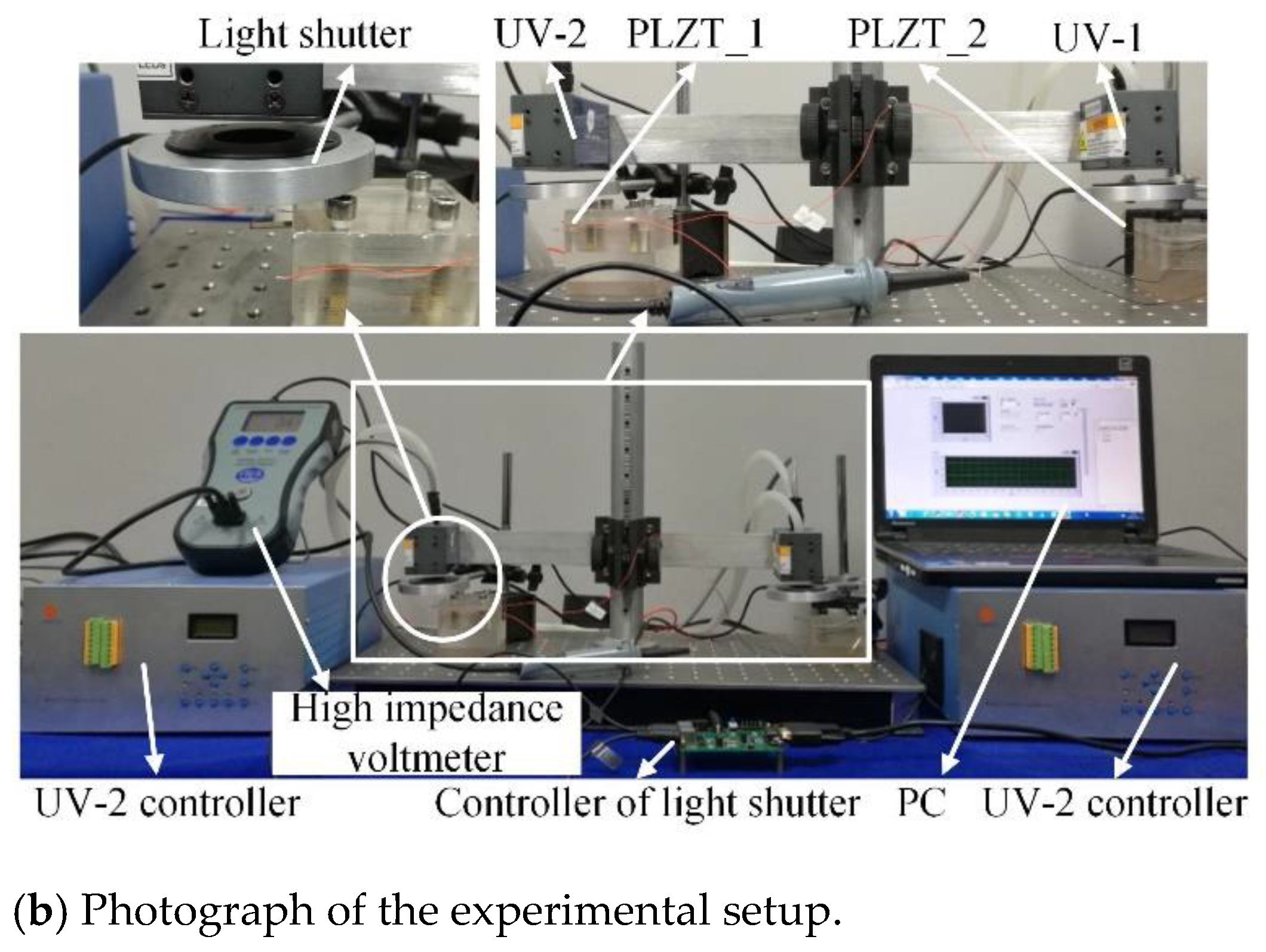
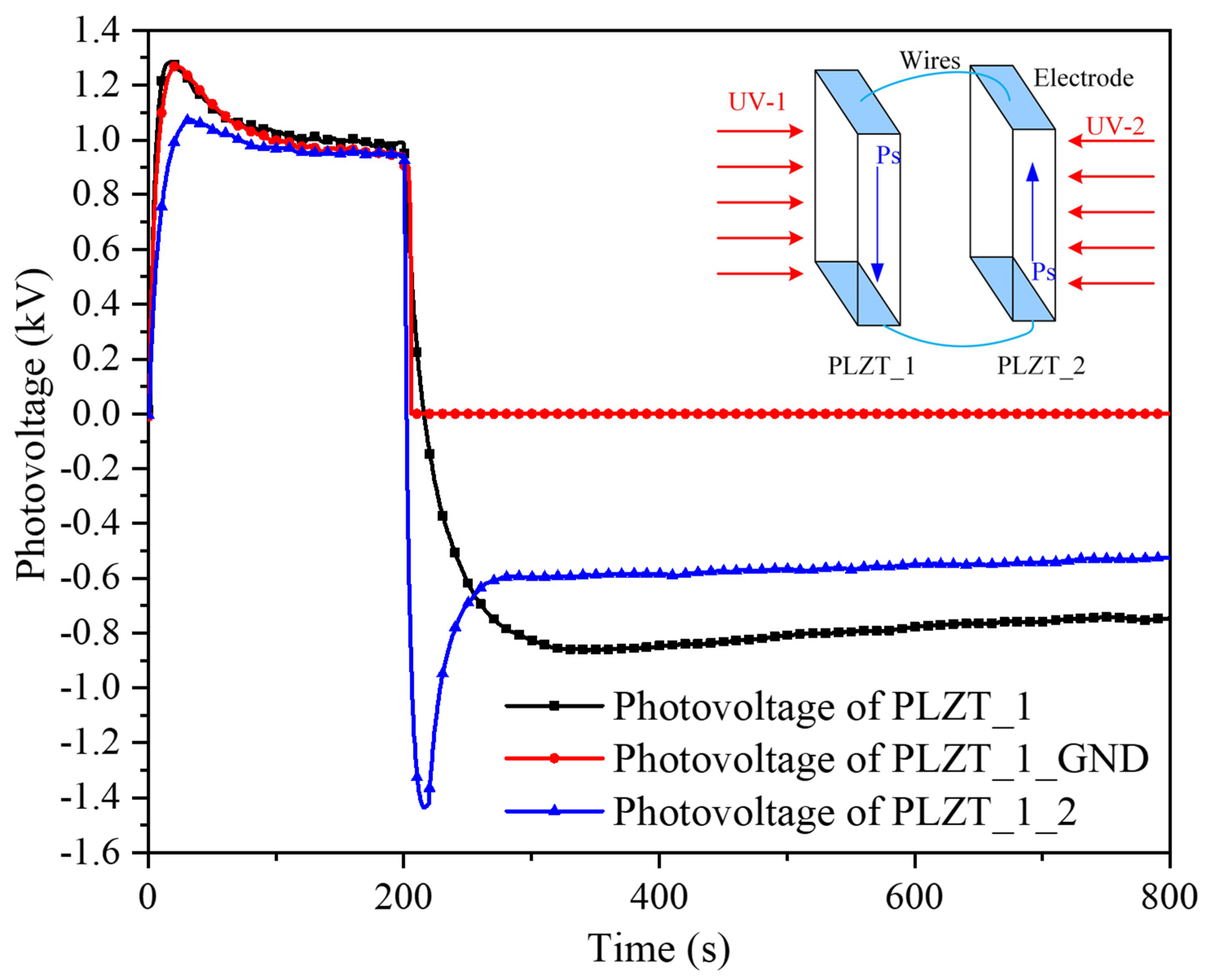
4. Dynamic Control Experiment of Photovoltage
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wang, D.H.; Yang, Q.; Dong, H.M. A Monolithic Compliant Piezoelectric-Driven Microgripper: Design, Modeling, and Testing. IEEE/ASME Trans. Mechatron. 2013, 18, 138–147. [Google Scholar] [CrossRef]
- Das, T.K.; Shirinzadeh, B.; Ghafarian, M.; Al-Jodah, A. Design, analysis, and experimental investigation of a single-stage and low parasitic motion piezoelectric actuated microgripper. Smart Mater. Struct. 2020, 29, 045028. [Google Scholar] [CrossRef]
- Wang, F.; Liang, C.; Tian, Y.; Zhao, X.; Zhang, D. Design of a Piezoelectric-Actuated Microgripper with a Three-Stage Flexure-Based Amplification. IEEE/ASME Trans. Mechatron. 2015, 20, 2205–2213. [Google Scholar] [CrossRef]
- Chen, W.; Zhang, X.; Li, H.; Wei, J.; Fatikow, S. Nonlinear analysis and optimal design of a novel piezoelectric-driven compliant microgripper. Mech. Mach. Theory 2017, 118, 32–52. [Google Scholar] [CrossRef]
- Sun, X.; Chen, W.; Chen, W.; Qi, S.; Li, W.; Hu, C.; Tao, J. Design and analysis of a large-range precision micromanipulator. Smart Mater. Struct. 2019, 28, 115031. [Google Scholar] [CrossRef]
- Shen, T.; Li, J.; Huang, L.; Chang, J.; Xie, J. Dynamic flow characteristics in U-type anti-high overload microfluidic inertial switch. Microfluid. Nanofluid. 2019, 23, 32. [Google Scholar] [CrossRef]
- Kim, D.H.; Lee, M.G.; Kim, B.; Sun, Y. A superelastic alloy microgripper with embedded electromagnetic actuators and piezoelectric force sensors: A numerical and experimental study. Smart Mater. Struct. 2005, 14, 1265–1272. [Google Scholar] [CrossRef] [Green Version]
- Diller, E.; Sitti, M. Three-Dimensional Programmable Assembly by Untethered Magnetic Robotic Micro-Grippers. Adv. Funct. Mater. 2014, 24, 4397–4404. [Google Scholar] [CrossRef]
- Chen, D.S.; Yeh, P.F.; Chen, Y.F.; Tsai, C.W.; Yin, C.Y.; Lai, R.J.; Tsai, J.C. An Electrothermal Actuator with Two Degrees of Freedom Serving as the Arm of a MEMS Gripper. IEEE Trans. Ind. Electron. 2014, 61, 5465–5471. [Google Scholar] [CrossRef]
- Solano, B.; Merrell, J.; Gallant, A.; Wood, D. Modelling and experimental verification of heat dissipation mechanisms in an SU-8 electrothermal microgripper. Microelectron. Eng. 2014, 124, 90–93. [Google Scholar] [CrossRef] [Green Version]
- Vatan, H.M.F.; Hamedi, M. Design, analysis and fabrication of a novel hybrid electrothermal microgripper in microassembly cell. Microelectron. Eng. 2020, 231, 111374. [Google Scholar] [CrossRef]
- Chang, H.; Zhao, H.; Ye, F.; Yuan, G.; Xie, J.; Kraft, M.; Yuan, W. A rotary comb-actuated microgripper with a large displacement range. Microsyst. Technol. 2014, 20, 119–126. [Google Scholar] [CrossRef]
- Bazaz, S.A.; Khan, F.; Shakoor, R.I. Design, simulation and testing of electrostatic SOI MUMPs based microgripper integrated with capacitive contact sensor. Sens. Actuators A Phys. 2011, 167, 44–53. [Google Scholar] [CrossRef]
- Jain, R.K.; Datta, S.; Majumder, S.; Dutta, A. Development of multi micro manipulation system using IPMC micro grippers. J. Intell. Robot. Syst. 2014, 74, 547–569. [Google Scholar] [CrossRef]
- Cheong, H.R.; Teo, C.Y.; Leow, P.L.; Lai, K.C.; Chee, P.S. Wireless-powered electroactive soft microgripper. Smart Mater. Struct. 2018, 27, 055014. [Google Scholar] [CrossRef]
- Ford, S.; Macias, G.; Lumia, R. Single active finger IPMC microgripper. Smart Mater. Struct. 2015, 24, 025015. [Google Scholar] [CrossRef]
- Shen, T.; Chang, J.; Xie, J.; Huang, L. Analysis of microchannel resistance factor based on automated simulation framework and BP neural network. Soft Comput. 2020, 24, 3379–3391. [Google Scholar] [CrossRef]
- Huang, C.; Lv, J.A.; Tian, X.; Wang, Y.; Liu, J.; Yu, Y. A remotely driven and controlled micro-gripper fabricated from light-induced deformation smart material. Smart Mater. Struct. 2016, 25, 095009. [Google Scholar] [CrossRef]
- Yurtsever, Z.; Küük, H.; Kucuk, H. Design, Fabrication and Vision Based Operational Analysis of Novel Shape Memory Alloy Micro Grippers. Int. J. Precis. Eng. Manuf. 2020, 21, 1697–1716. [Google Scholar] [CrossRef]
- Garcés-Schröder, M.; Zimmermann, T.; Siemers, C.; Leester-Schädel, M.; Böl, M.; Dietzel, A. Shape Memory Alloy Actuators for Silicon Microgrippers. J. Microelectromech. Syst. 2019, 99, 1–13. [Google Scholar] [CrossRef]
- Wang, X.J.; Huang, J.H.; Wang, J. Experimental research on the response characteristics of PLZT ceramics. Smart Mater. Struct. 2015, 24, 075017. [Google Scholar] [CrossRef]
- Alogla, A.F.; Amalou, F.; Balmer, C.; Scanlan, P.; Shu, W.; Reuben, R.L. Micro-Tweezers: Design, Fabrication, Simulation and Testing of a Pneumatically Actuated Micro-Gripper for Micromanipulation and Microtactile Sensing. Sens. Actuators A Phys. 2015, 236, 394–404. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Mrad, R.B. Design, Modeling, and Demonstration of a MEMS Repulsive-Force Out-of-Plane Electrostatic Micro Actuator. J. Microelectromech. Syst. 2008, 17, 532–547. [Google Scholar]
- Huang, J.H.; Wang, X.J.; Wang, J. A mathematical model for predicting photo-induced voltage and photostriction of PLZT with coupled multi-physics fields and its application. Smart Mater. Struct. 2015, 25, 025002. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Lateral distance between adjacent fixed electrodes | d1 | 6 | μm |
| Initial vertical distance between moving electrode and central fixed electrode | d2 | 1 | μm |
| Width of moving electrode | Wm | 15 | μm |
| Width of fixed electrode | Wf | 30 | μm |
| Width of central fixed electrode | Wfc | 17 | μm |
| Height of moving electrodes | hm | 2 | μm |
| Height of fixed electrodes | hf | 0.5 | μm |
| Mechanical Properties | Elastic Modulus (GPa) | Poisson’s Ratio | Density (kg/m3) | Yield Strength (GPa) |
|---|---|---|---|---|
| Values | 166 | 0.23 | 2330 | 7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, J.; Jiang, C.; Li, G.; Lu, Q.; Chen, H. Design and Analysis of a Light-Operated Microgripper Using an Opto-Electrostatic Repulsive Combined Actuator. Micromachines 2021, 12, 1026. https://doi.org/10.3390/mi12091026
Huang J, Jiang C, Li G, Lu Q, Chen H. Design and Analysis of a Light-Operated Microgripper Using an Opto-Electrostatic Repulsive Combined Actuator. Micromachines. 2021; 12(9):1026. https://doi.org/10.3390/mi12091026
Chicago/Turabian StyleHuang, Jiahan, Chengbin Jiang, Guanghui Li, Qinghua Lu, and Haichu Chen. 2021. "Design and Analysis of a Light-Operated Microgripper Using an Opto-Electrostatic Repulsive Combined Actuator" Micromachines 12, no. 9: 1026. https://doi.org/10.3390/mi12091026
APA StyleHuang, J., Jiang, C., Li, G., Lu, Q., & Chen, H. (2021). Design and Analysis of a Light-Operated Microgripper Using an Opto-Electrostatic Repulsive Combined Actuator. Micromachines, 12(9), 1026. https://doi.org/10.3390/mi12091026