Ultra-Low Frequency Eccentric Pendulum-Based Electromagnetic Vibrational Energy Harvester


Abstract
1. Introduction
2. Structure Design and Analysis Model of the Energy Harvester
3. Results and Discussion
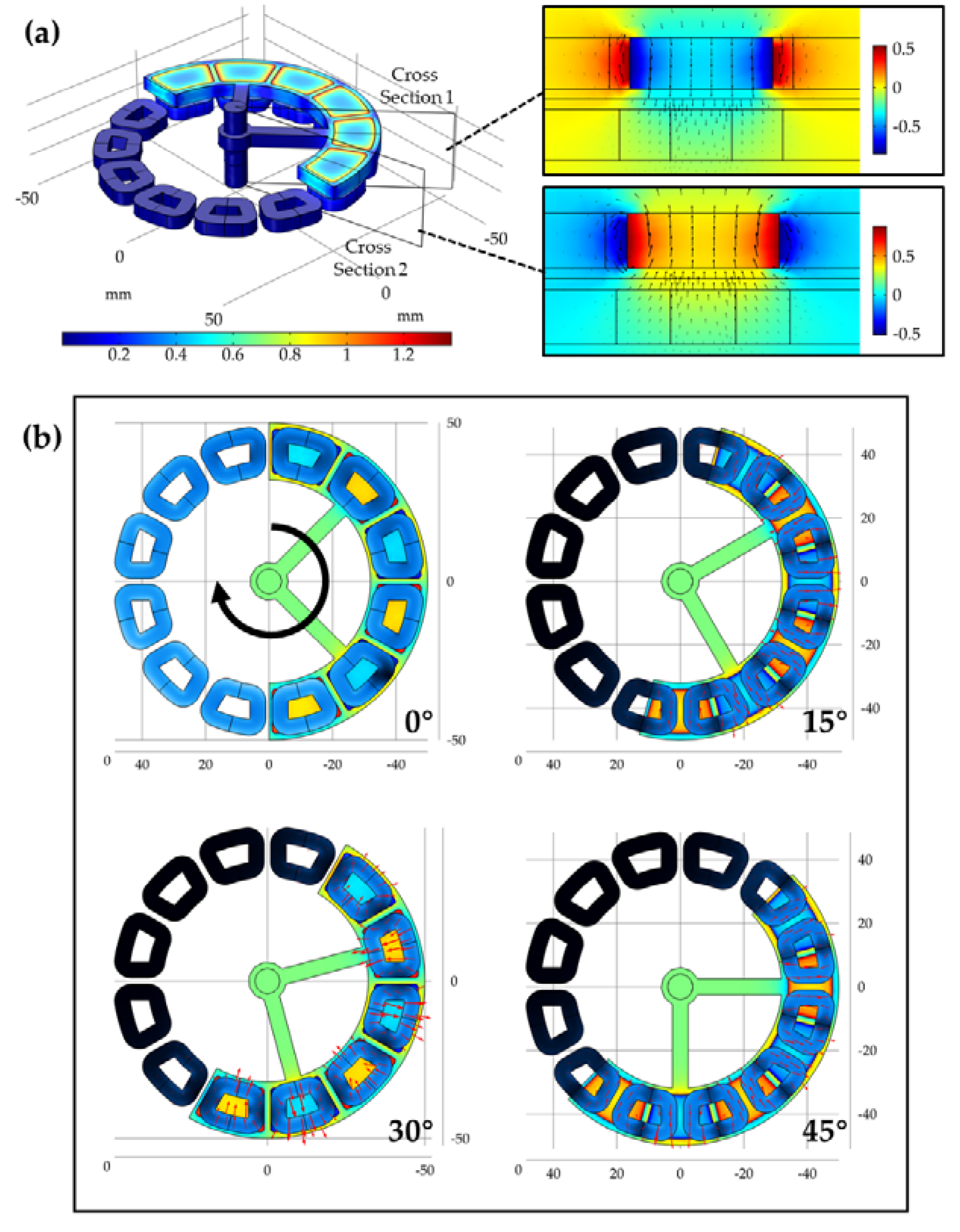
3.1. Analysis of Magnetic Field Distribution and Power Generation Mechanism
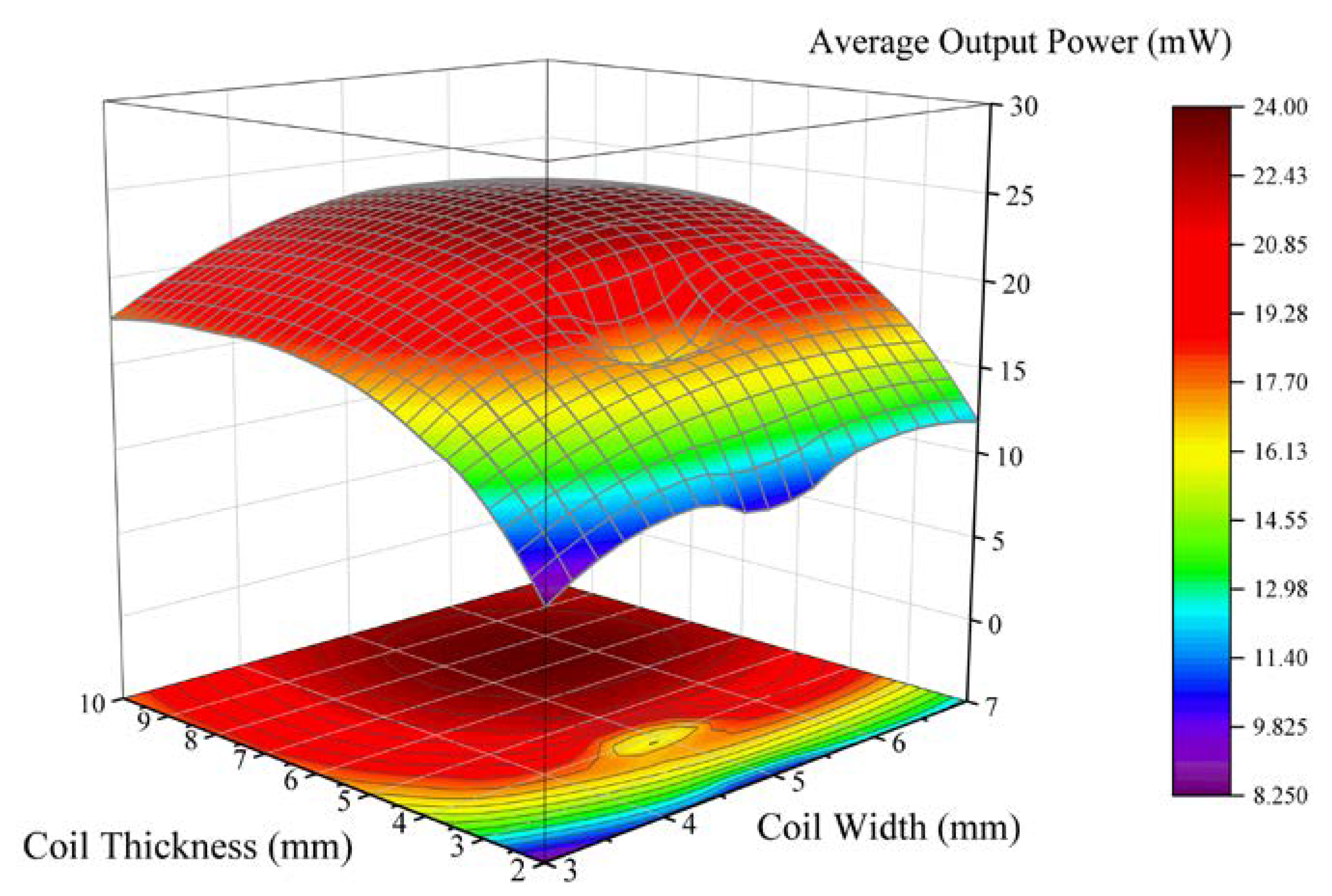
3.2. Optimization of Coil Design Parameters
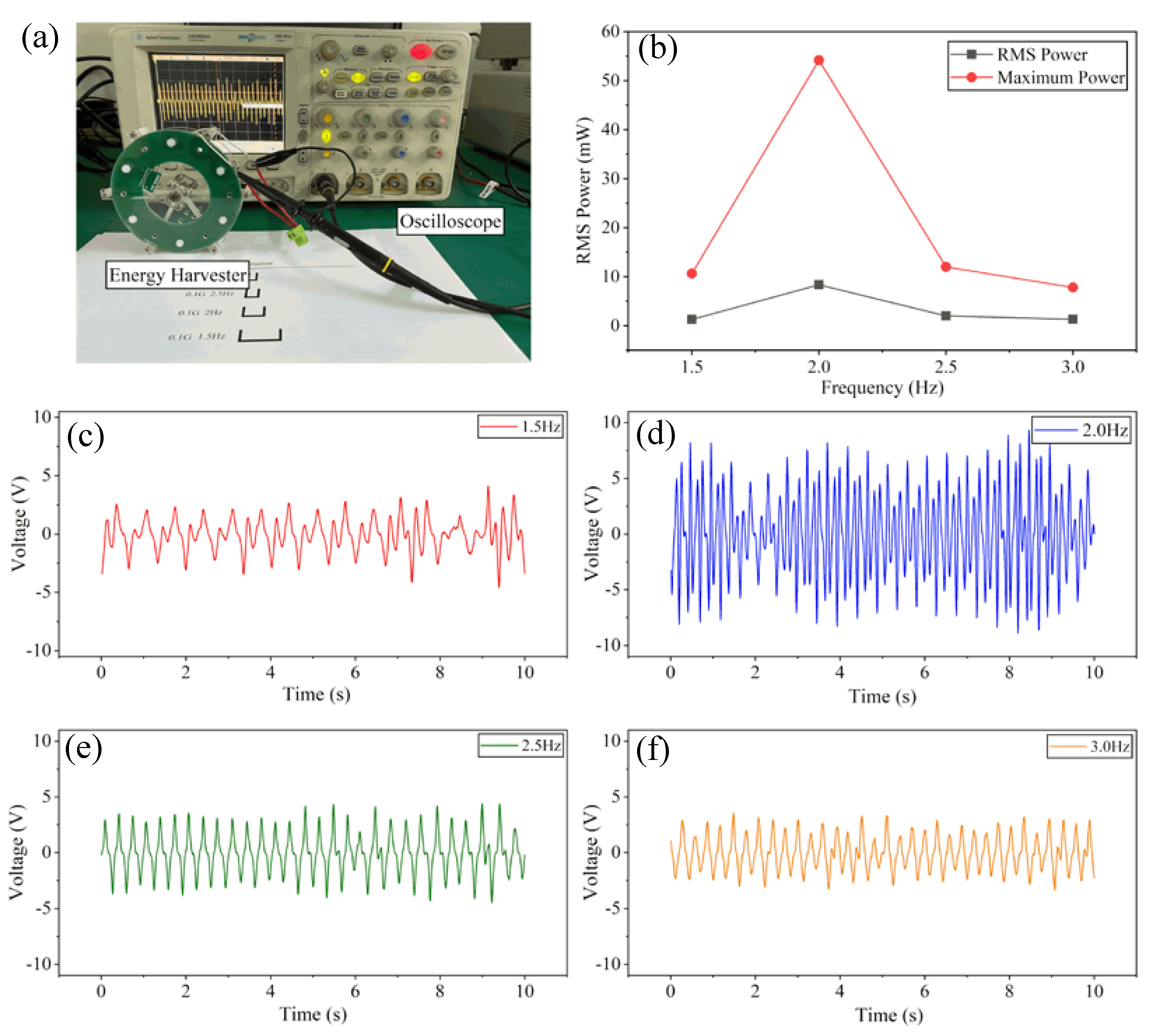
3.3. Low-Frequency Vibrational Energy Harvesting Test
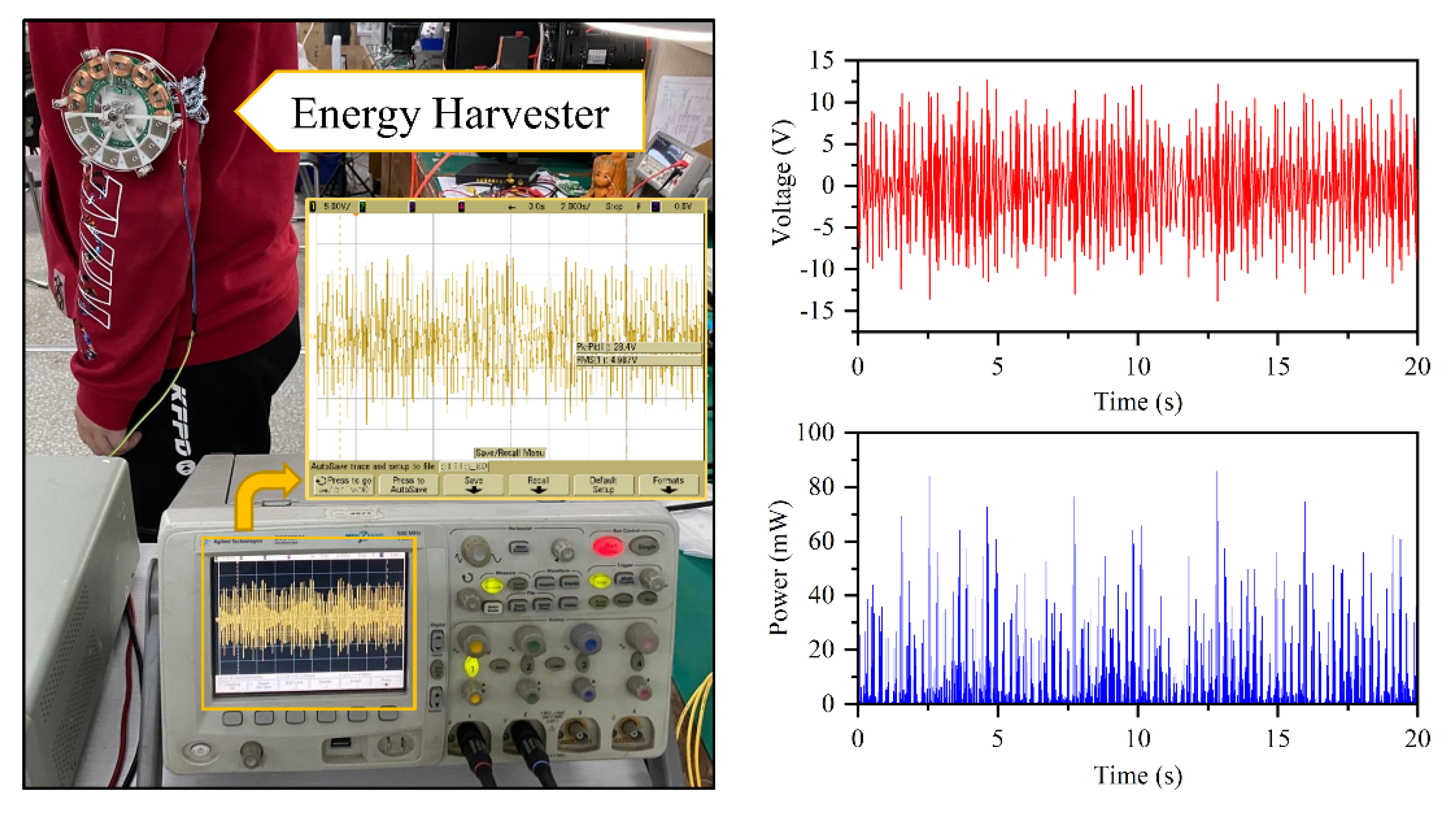
3.4. Vibrational Energy Harvesting Test Using Prototype
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ojha, T.; Misra, S.; Raghuwanshi, N.S. Wireless sensor networks for agriculture: The state-of-the-art in practice and future challenges. Comput. Electron. Agric. 2015, 118, 66–84. [Google Scholar] [CrossRef]
- Ali, A.; Ming, Y.; Chakraborty, S.; Iram, S. A Comprehensive Survey on Real-Time Applications of WSN. Future Internet 2017, 9, 77. [Google Scholar] [CrossRef]
- Latré, B.; Braem, B.; Moerman, I.; Blondia, C.; Demeester, P. A Survey on Secure Wireless Body Area Networks. Secur. Commun. Netw. 2017, 17, 1–8. [Google Scholar]
- Ha, I. Technologies and Research Trends in Wireless Body Area Networks for Healthcare: A Systematic Literature Review. Int. J. Distrib. Sens. Netw. 2015, 11, 573538. [Google Scholar] [CrossRef]
- Hao, Y.; Foster, R. Wireless body sensor networks for health-monitoring applications. Physiol. Meas. 2008, 29, R27–R56. [Google Scholar] [CrossRef]
- Shahanaghi, A.; Yang, Y.L.; Buehrer, R.M. Stochastic Link Modeling of Static Wireless Sensor Networks Over the Ocean Surface. IEEE Trans. Wirel. Commun. 2020, 19, 4154–4169. [Google Scholar] [CrossRef]
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater Sensor Network Applications: A Comprehensive Survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef]
- Xu, G.B.; Shen, W.M.; Wang, X.B. Applications of Wireless Sensor Networks in Marine Environment Monitoring: A Survey. Sensors 2014, 14, 16932–16954. [Google Scholar] [CrossRef]
- Zhao, Q.; Li, H.; Li, H.; Wang, H. Design of Power Management System Based on Wireless Sensor Node. In Proceedings of the 2009 Symposium on Photonics and Optoelectronics, Wuhan, China, 14–16 August 2009; pp. 381–384. [Google Scholar]
- Zytoune, O.; Fakhri, Y.; Aboutajdine, D. Lifetime Optimization for Wireless Sensor Networks. In Proceedings of the 2009 IEEE/Acs International Conference on Computer Systems and Applications, Rabat, Morocco, 10–13 May 2009; pp. 816–820. [Google Scholar]
- Wang, W.; He, Y.; Zhang, D.; Wu, Y.; Pan, D. Multi-Criteria Evaluation of Best Available Treatment Technology for Waste Lead-Acid Battery: The Case of China. Sustainability 2020, 12, 4479. [Google Scholar] [CrossRef]
- Shen, J.; Li, X.; Shi, X.; Wang, W.; Zhou, H.; Wu, J.; Wang, X.; Li, J. The toxicity of lithium to human cardiomyocytes. Environ. Sci. Eur. 2020, 32, 1–2. [Google Scholar] [CrossRef]
- Moreno-Merino, L.; Jiménez-Hernández, M.E.; de la Losa, A.; Huerta-Muñoz, V. Comparative assessment of button cells using a normalized index for potential pollution by heavy metals. Sci. Total Environ. 2015, 526, 187–195. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Hou, C.; Lin, J.; Li, Y.; Shi, Q.; Chen, T.; Sun, L.; Lee, C. A non-resonant rotational electromagnetic energy harvester for low-frequency and irregular human motion. Appl. Phys. Lett. 2018, 113, 203901. [Google Scholar] [CrossRef]
- Liu, H.; Fu, H.; Sun, L.; Lee, C.; Yeatman, E.M. Hybrid energy harvesting technology: From materials, structural design, system integration to applications. Renew. Sustain. Energy Rev. 2020, 110473. [Google Scholar] [CrossRef]
- Agarwal, M.; Munjal, A.; Dusane, R. To Demonstrate the Potential Application of “Low Temperature and High Performance Silicon Heterojunction Solar Cells Fabricated Using HWCVD” in Wireless Sensor Network: An Initial Research. J. Sol. Energy Eng. Trans. ASME 2018, 140, 041002. [Google Scholar] [CrossRef]
- Horng, G.J.; Wu, H.T. The Adaptive Path Selection Mechanism for Solar-Powered Wireless Sensor Networks. Wirel. Pers. Commun. 2015, 81, 1289–1301. [Google Scholar] [CrossRef]
- Ibrahim, R.; Chung, T.D.; Hassan, S.M.; Bingi, K.; Salahuddin, S. Solar Energy Harvester for Industrial Wireless Sensor Nodes. Procedia Comput. Sci. 2017, 105, 111–118. [Google Scholar] [CrossRef]
- Liu, D.; Chen, B.; An, J.; Li, C.; Liu, G.; Shao, J.; Tang, W.; Zhang, C.; Wang, Z.L. Wind-driven self-powered wireless environmental sensors for Internet of Things at long distance. Nano Energy 2020, 73, 104819. [Google Scholar] [CrossRef]
- Zhang, C.; He, X.F.; Li, S.Y.; Cheng, Y.Q.; Rao, Y. A Wind Energy Powered Wireless Temperature Sensor Node. Sensors 2015, 15, 5020–5031. [Google Scholar] [CrossRef]
- Tang, M.; Guan, Q.; Wu, X.; Zeng, X.; Zhang, Z.; Yuan, Y. A high-efficiency multidirectional wind energy harvester based on impact effect for self-powered wireless sensors in the grid. Smart Mater. Struct. 2019, 28, 13. [Google Scholar] [CrossRef]
- Tang, M.; Guan, Q.; Wu, X.; Zeng, X.; Zhang, Z.; Yuan, Y. Wireless Sensor Network Utilizing Radio-Frequency Energy Harvesting for Smart Building Applications. IEEE Antennas Propag. Mag. 2018, 60, 124–136. [Google Scholar]
- Naderi, M.Y.; Chowdhury, K.R.; Basagni, S.; Heinzelman, W.; De, S.; Jana, S. Surviving Wireless Energy Interference in RF-harvesting Sensor Networks: An Empirical Study. In Proceedings of the 2014 Eleventh Annual IEEE International Conference on Sensing, Communication, and Networking Workshops, Singapore, 30 June–3 July 2014; pp. 39–44. [Google Scholar]
- Zhu, Y.H.; Li, E.T.; Chi, K.K. Encoding Scheme to Reduce Energy Consumption of Delivering Data in Radio Frequency Powered Battery-Free Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2018, 67, 3085–3097. [Google Scholar] [CrossRef]
- Wang, L.; Zhao, L.; Luo, G.; Zhao, Y.; Yang, P.; Jiang, Z.; Maeda, R. System level design of wireless sensor node powered by piezoelectric vibration energy harvesting. Sens. Actuators A-Phys. 2020, 310, 112039. [Google Scholar] [CrossRef]
- Owen, T.H.; Kestermann, S.; Torah, R.; Beeby, S.P. Self powered wireless sensors for condition monitoring applications. Sens. Rev. 2009, 29, 38–43. [Google Scholar] [CrossRef]
- Zhang, X.; Fang, J.; Meng, F.; Wei, X. A Novel Self-Powered Wireless Sensor Node Based on Energy Harvesting for Mechanical Vibration Monitoring. Math. Probl. Eng. 2014, 2014, 5. [Google Scholar] [CrossRef]
- Kapica, J. Wind and photovoltaic potential in Europe in the context of mid-term energy storage. J. Renew. Sustain. Energy 2020, 12, 12. [Google Scholar] [CrossRef]
- Lehner, M.; Ascher, A.; Eberhardt, M.; Biebl, E. A Solar Powered UHF Transponder for Wildlife and Low Light Applications. In Proceedings of the 2015 IEEE 6th International Symposium on Microwave, Antenna, Propagation, and Emc Technologies, Shanghai, China, 28–30 October 2015; pp. 577–582. [Google Scholar]
- Ibrahim, H.H.; Singh, M.S.; Al-Bawri, S.S.; Islam, M.T. Synthesis, Characterization and Development of Energy Harvesting Techniques Incorporated with Antennas: A Review Study. Sensors 2020, 20, 2772. [Google Scholar] [CrossRef]
- Cao, D.; Ding, X.; Guo, X.; Yao, M. Improved Flow-Induced Vibration Energy Harvester by Using Magnetic Force: An Experimental Study. Int. J. Precis. Eng. Manuf. -Green Technol. 2020. [Google Scholar] [CrossRef]
- Nabavi, S.F.; Farshidianfar, A.; Afsharfard, A. Novel piezoelectric-based ocean wave energy harvesting from offshore buoys. Appl. Ocean Res. 2018, 76, 174–183. [Google Scholar] [CrossRef]
- Suhaimi, K.; Ramlan, R.; Putra, A. Translation to Rotary Frequency-up Conversion Vibration Based Energy Harvesting Device for Human Body Motion. In Noise, Vibration and Comfort; Nor, M.J.M., Nuawi, M.Z., Abdullah, S., Zulkifli, R., Haris, S.M., Nopiah, Z.M., Arifin, A., Eds.; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2014; pp. 349–354. [Google Scholar]
- Wei, C.F.; Jing, X.J. A comprehensive review on vibration energy harvesting: Modelling and realization. Renew. Sustain. Energy Rev. 2017, 74, 1–18. [Google Scholar] [CrossRef]
- Honma, H.; Mitsuya, H.; Hashiguchi, G.; Fujita, H.; Toshiyoshi, H. Improvement of energy conversion effectiveness and maximum output power of electrostatic induction-type MEMS energy harvesters by using symmetric comb-electrode structures. J. Micromech. Microeng. 2018, 28, 13. [Google Scholar] [CrossRef]
- Hammad, B.; Abdelmoula, H.; Abdel-Rahman, E.; Abdelkefi, A. Nonlinear Analysis and Performance of Electret-Based Microcantilever Energy Harvesters. Energies 2019, 12, 4249. [Google Scholar] [CrossRef]
- Li, J.; Tong, X.; Oxaal, J.; Liu, Z.; Hella, M.; Borca-Tasciuc, D.A. Investigation of parallel-connected MEMS electrostatic energy harvesters for enhancing output power over a wide frequency range. J. Micromech. Microeng. 2019, 29, 11. [Google Scholar] [CrossRef]
- Park, J.; Lee, S.; Kwak, B.M. Design optimization of piezoelectric energy harvester subject to tip excitation. J. Mech. Sci. Technol. 2012, 26, 137–143. [Google Scholar] [CrossRef]
- Raju, S.S.; Umapathy, M.; Uma, G. Cantilever piezoelectric energy harvester with multiple cavities. Smart Mater. Struct. 2015, 24, 11. [Google Scholar]
- Morimoto, M.; Tsujiura, Y.; Koshiba, Y.; Kanno, I.; Ishida, K. Vibration energy harvester with piezoelectric properties using polyurea thin films. Mol. Cryst. Liq. Cryst. 2017, 653, 188–193. [Google Scholar] [CrossRef]
- Fu, H.L.; Yeatman, E.M. A methodology for low-speed broadband rotational energy harvesting using piezoelectric transduction and frequency up-conversion. Energy 2017, 125, 152–161. [Google Scholar] [CrossRef]
- Wu, Y.; Qiu, J.; Zhou, S.; Ji, H.; Chen, Y.; Li, S. A piezoelectric spring pendulum oscillator used for multi-directional and ultra-low frequency vibration energy harvesting. Appl. Energy 2018, 231, 600–614. [Google Scholar] [CrossRef]
- Roy, S.; Podder, P.; Mallick, D. Nonlinear Energy Harvesting Using Electromagnetic Transduction for Wide Bandwidth. IEEE Magn. Lett. 2016, 7, 4. [Google Scholar] [CrossRef]
- Chen, S.J.; Wu, J.Y. Fabrication of a 2-DOF electromagnetic energy harvester with in-phase vibrational bandwidth broadening. Smart Mater. Struct. 2016, 25, 8. [Google Scholar] [CrossRef]
- Jo, S.E.; Kim, M.S.; Kim, Y.J. Electromagnetic human vibration energy harvester comprising planar coils. Electron. Lett. 2012, 48, 874–875. [Google Scholar] [CrossRef]
- Uluşan, H.; Yaşar, O.; Zorlu, Ö.; Külah, H. Optimized Electromagnetic Harvester with a Non-Magnetic Inertial Mass. Procedia Eng. 2015, 120, 337–340. [Google Scholar] [CrossRef]
- Foisal, A.R.M.; Chung, G. Design and Analysis of a Vibration-driven AA Size Electromagnetic Energy Harvester Using Magnetic Spring. Trans. Electr. Electron. Mater. 2012, 13, 125–128. [Google Scholar] [CrossRef]
- Geisler, M.; Boisseau, S.; Perez, M.; Gasnier, P.; Willemin, J.; Ait-Ali, I.; Perraud, S. Human-motion energy harvester for autonomous body area sensors. Smart Mater. Struct. 2017, 26, 12. [Google Scholar] [CrossRef]
- Bendame, M.; Abdel-Rahman, E.; Soliman, M. Wideband, low-frequency springless vibration energy harvesters: Part I. J. Micromech. Microeng. 2016, 26, 12. [Google Scholar]
- Fan, K.; Cai, M.; Wang, F.; Tang, L.; Liang, J.; Wu, Y.; Qu, H.; Tan, Q. A string-suspended and driven rotor for efficient ultra-low frequency mechanical energy harvesting. Energy Convers. Manag. 2019, 198, 9. [Google Scholar] [CrossRef]
- Gu, Y.; Liu, W.; Zhao, C.; Wang, P. A goblet-like non-linear electromagnetic generator for planar multidirectional vibration energy harvesting. Appl. Energy 2020, 266, 19. [Google Scholar] [CrossRef]
- Xu, J.; Tang, J. Multi-directional energy harvesting by piezoelectric cantilever-pendulum with internal resonance. Appl. Phys. Lett. 2015, 107, 213902. [Google Scholar] [CrossRef]
- Fu, H.; Theodossiades, S.; Gunn, B.; Abdallah, I.; Chatzi, E. Ultra-low frequency energy harvesting using bi-stability and rotary-translational motion in a magnet-tethered oscillator. Nonlinear Dyn. 2020, 101, 2131–2143. [Google Scholar] [CrossRef]
- Pillatsch, P.; Yeatman, E.M.; Holmes, A.S. A piezoelectric frequency up-converting energy harvester with rotating proof mass for human body applications. Sens. Actuators A-Phys. 2014, 206, 178–185. [Google Scholar] [CrossRef]
- Ramezanpour, R.; Nahvi, H.; Ziaei-Rad, S. Electromechanical behavior of a pendulum-based piezoelectric frequency up-converting energy harvester. J. Sound Vib. 2016, 370, 280–305. [Google Scholar] [CrossRef]
- Lee, B.C.; Chung, G.S. Design and analysis of a pendulum-based electromagnetic energy harvester using antiphase motion. IET Renew. Power Gener. 2016, 10, 1625–1630. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of Component | Properties | Parameters |
|---|---|---|
| Pendulum | Framework Material | ABS resin |
| Radius | 50 mm | |
| Magnet Material | Nd-Fe-B Alloy | |
| Magnet Brand | N35 | |
| Coil | Inner Radius | 33.5 mm |
| Outer Radius | 48.5 mm | |
| Sector Angle | 30° | |
| Shaft | Diameter | 4 mm |
| Material | Stainless Steel | |
| Overall Size | Φ100 mm × 19.6 mm | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Deng, H.; Zhang, Y.; Li, K.; Huang, S.; Liu, X. Ultra-Low Frequency Eccentric Pendulum-Based Electromagnetic Vibrational Energy Harvester. Micromachines 2020, 11, 1009. https://doi.org/10.3390/mi11111009
Li M, Deng H, Zhang Y, Li K, Huang S, Liu X. Ultra-Low Frequency Eccentric Pendulum-Based Electromagnetic Vibrational Energy Harvester. Micromachines. 2020; 11(11):1009. https://doi.org/10.3390/mi11111009
Chicago/Turabian StyleLi, Mingxue, Huichao Deng, Yufeng Zhang, Kexin Li, Shijie Huang, and Xiaowei Liu. 2020. "Ultra-Low Frequency Eccentric Pendulum-Based Electromagnetic Vibrational Energy Harvester" Micromachines 11, no. 11: 1009. https://doi.org/10.3390/mi11111009
APA StyleLi, M., Deng, H., Zhang, Y., Li, K., Huang, S., & Liu, X. (2020). Ultra-Low Frequency Eccentric Pendulum-Based Electromagnetic Vibrational Energy Harvester. Micromachines, 11(11), 1009. https://doi.org/10.3390/mi11111009