Active Nonlinear Acoustic Sensing of an Object with Sum or Difference Frequency Fields



Abstract
:
1. Introduction
2. Linear and Second Order Nonlinear Formulation
2.1. First Order Formulation
2.2. Second Order Formulation
2.3. Summary
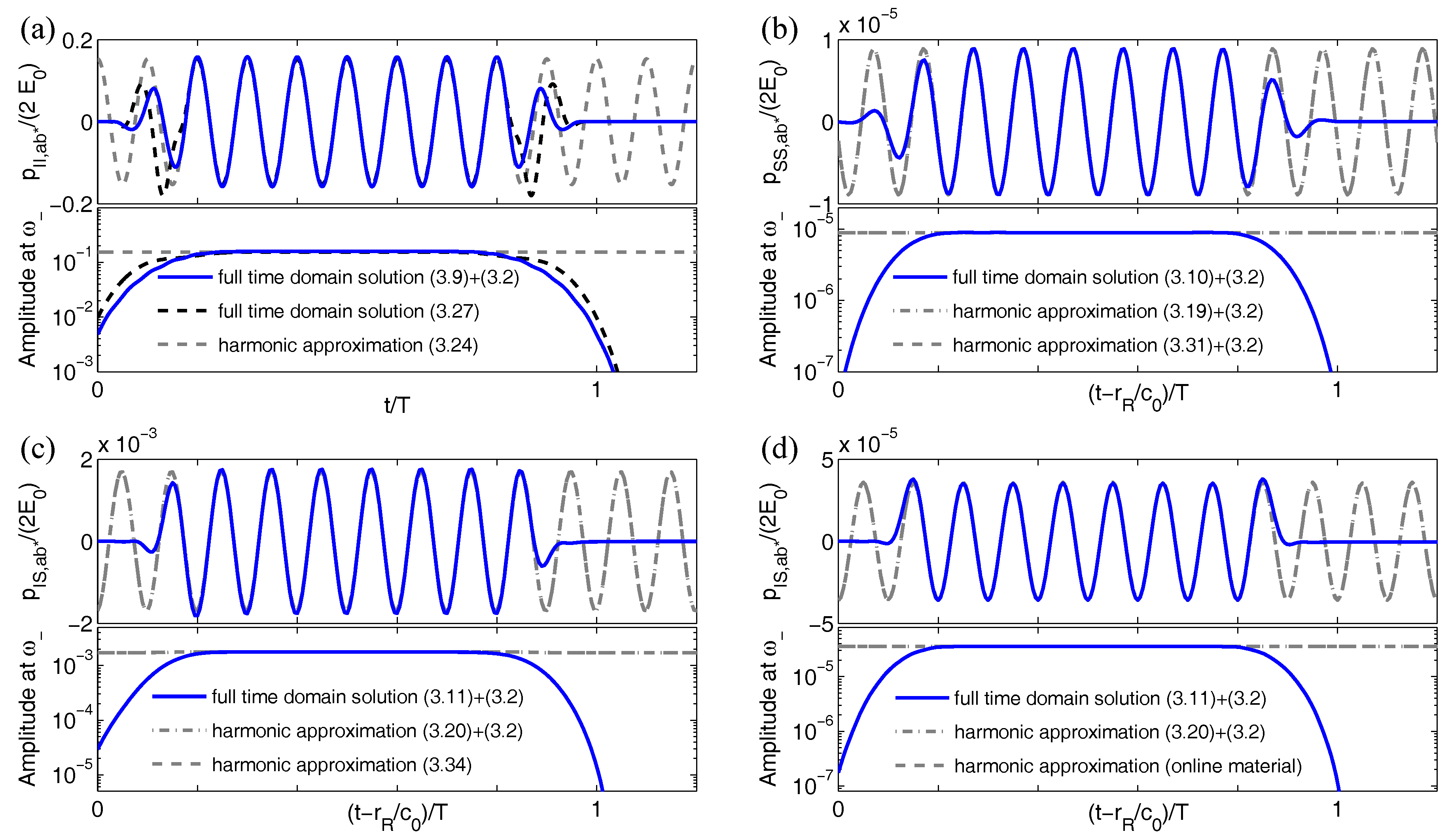
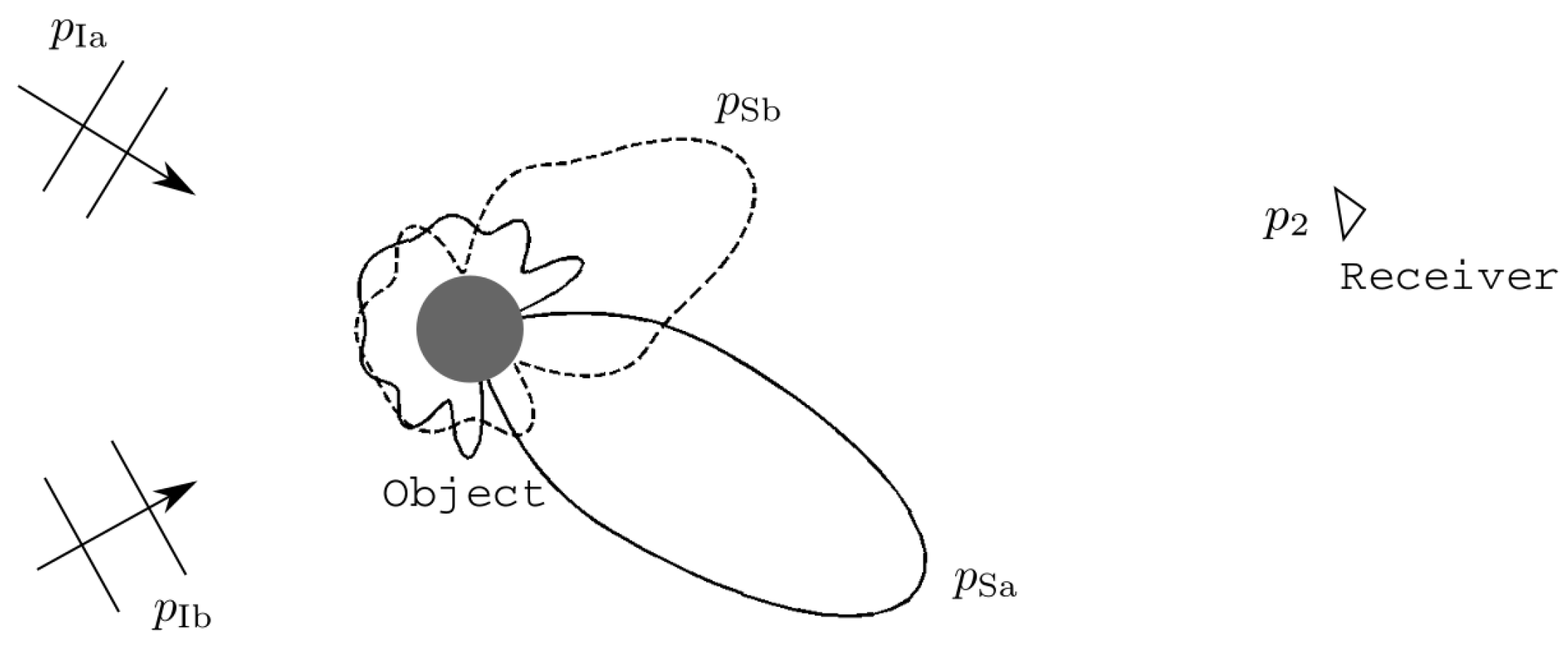
3. Solutions for Wave-Wave Interactions
3.1. Direct Integration
3.1.1. General Approach
3.2. Analytic Solutions
3.2.1. Incident-Incident Interaction of Plane Waves of General Time Dependence
3.2.2. Scattered-Scattered Interaction
3.2.3. Incident-Scattered Interaction
3.3. Sound Pressure Level of the IS and SS interactions
3.3.1. S2 for Small Pressure Release or Gas Filled Bubbles
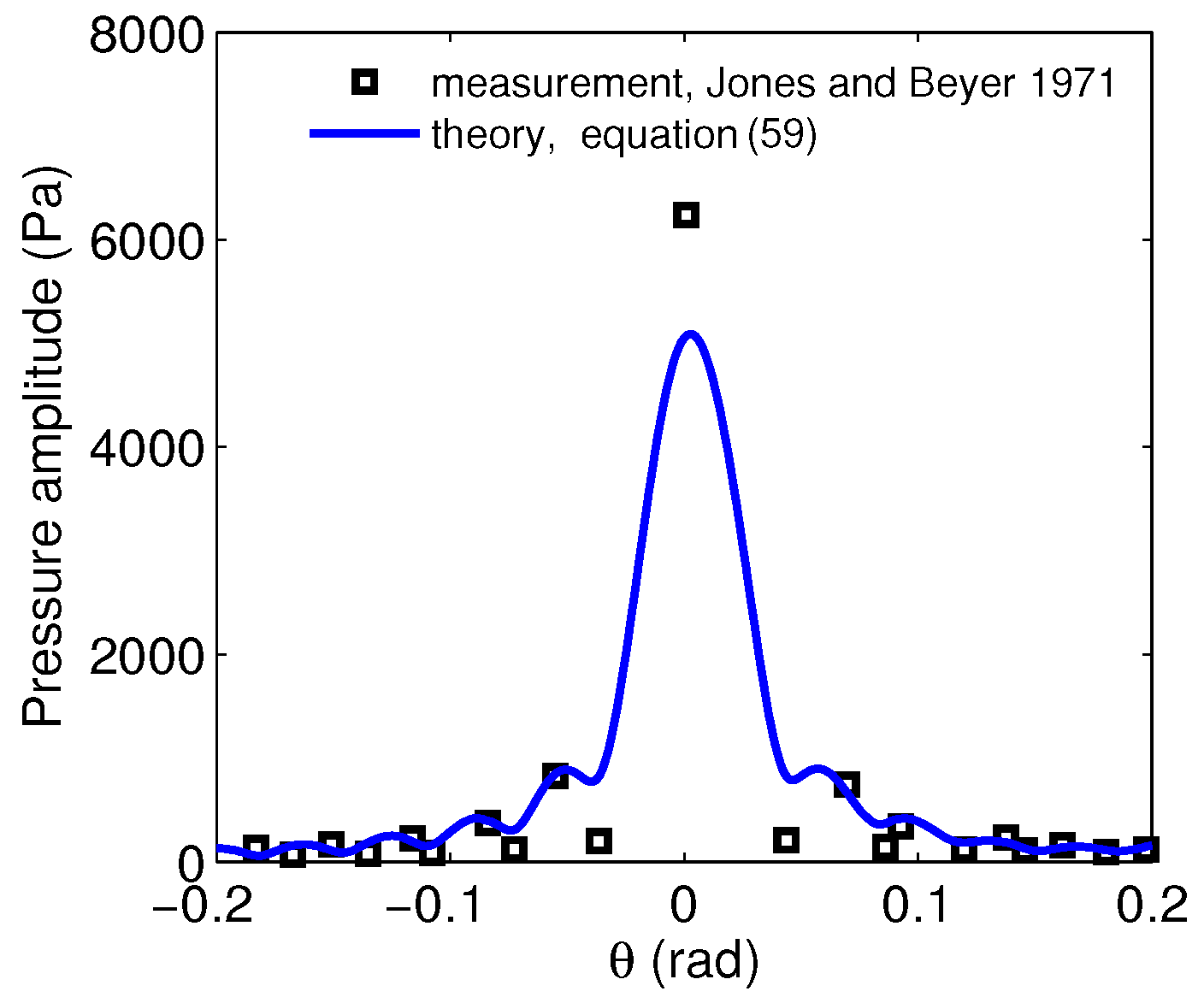
4. Confirmation of Theory with Measurements
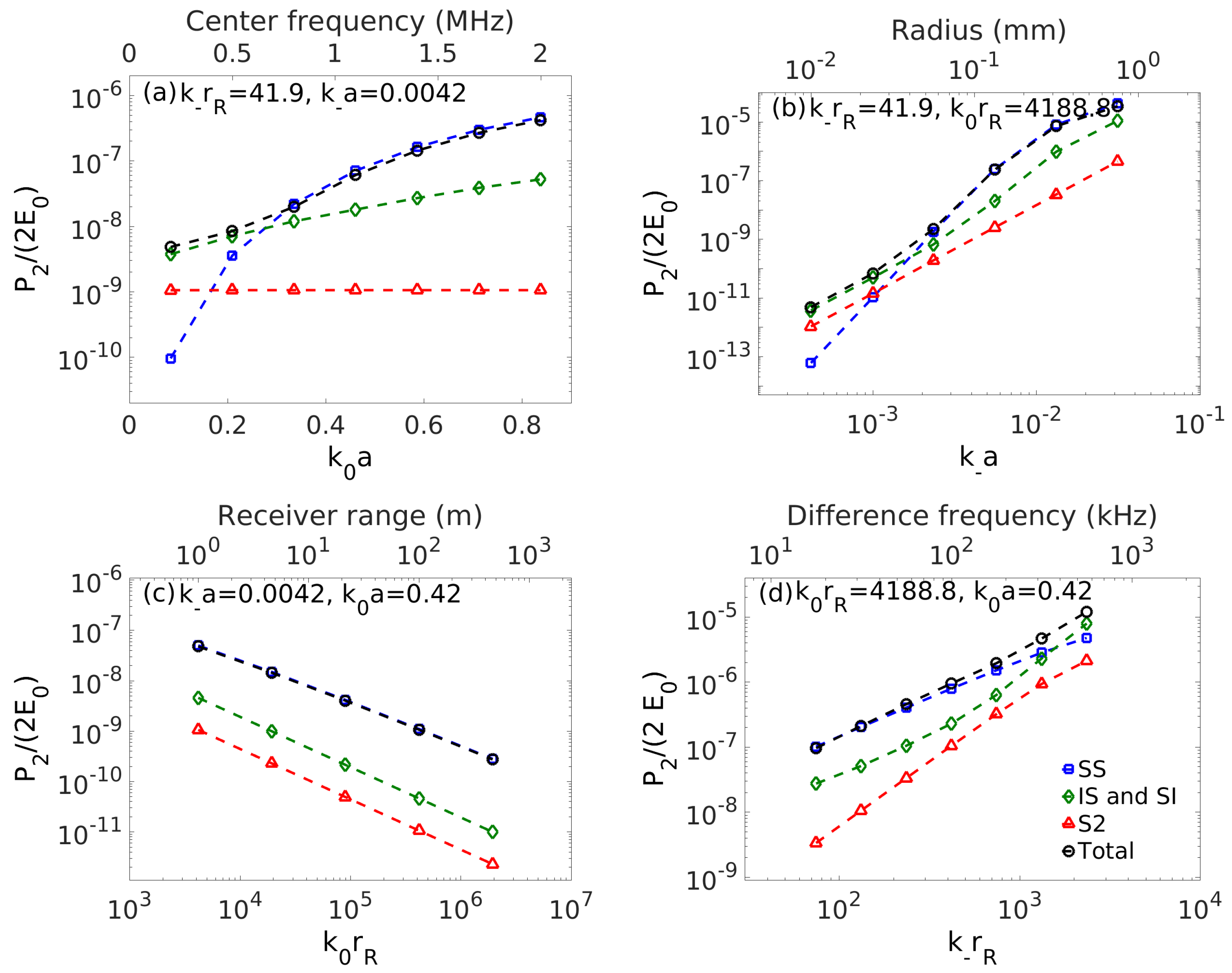
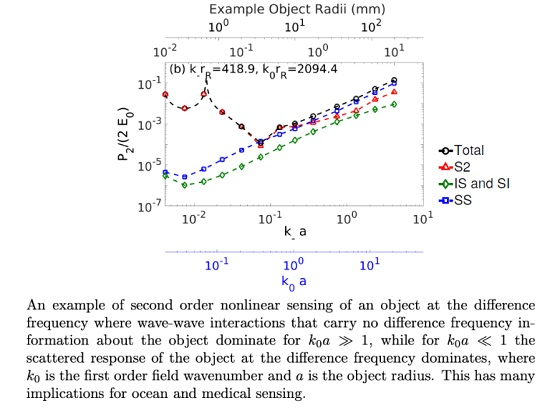
5. Transitions Between Dominant Mechanisms in Sum or Difference Frequency Sensing of an Object
5.1. Medical and Fine-Scale Underwater Sensing
5.2. Sensing Ocean Bubbles
5.3. Ocean Fisheries Sensing
5.4. Sensing Objects From IS Interactions
5.5. Sensing Objects in Air
5.6. Sensing in the Solid Earth
6. Discussion
7. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A. Second Order Nonlinear Acoustic Wave Equation in Medium with Volume Inhomogeneities
Appendix B. Second Order Pressure Field from a Small Resonant Air Bubble
Appendix C. Locally Reacting Boundary
Appendix D. Static and Dynamic Force
Appendix E. Space-Time Isolation of Second Order Field Components that Carry Information About an Object

Appendix F. Transitions Between Mechanisms for Rigid and Pressure Release Objects
References
- Beyer, R. Nonlinear Acoustics; Acoustical Society of America: Melville, NY, USA, 1997. [Google Scholar]
- Newhouse, V.; Shankar, P.M. Bubble size measurements using the nonlinear mixing of two frequencies. J. Acoust. Soc. Am. 1984, 75, 1473–1477. [Google Scholar] [CrossRef]
- Westervelt, P.J. Parametric Acoustic Array. J. Acoust. Soc. Am. 1963, 35, 535–537. [Google Scholar] [CrossRef]
- Fatemi, M.; Greenleaf, J.F. Ultrasound-Stimulated Vibro-Acoustic Spectrography. Science 1998, 280, 82–85. [Google Scholar] [CrossRef] [PubMed]
- Fatemi, M.; Greenleaf, J.F. Vibro-acoustography: An imaging modality based on ultrasound-stimulated acoustic emission. Proc. Natl. Acad. Sci. USA 1999, 96, 6603–6608. [Google Scholar] [CrossRef] [PubMed]
- Mitri, F.; Silva, G.; Greenleaf, J.F.; Fatemi, M. Simultaneous sum-frequency and vibro-acoustography imaging for nondestructive evaluation and testing applications. J. Appl. Phys. 2007, 102, 114911. [Google Scholar] [CrossRef]
- Godø, O.R.; Foote, K.G.; Dybedal, J.; Tenningen, E.; Patel, R. Detecting Atlantic herring by parametric sonar. J. Acoust. Soc. Am. 2010, 127, EL153–EL159. [Google Scholar] [CrossRef] [PubMed]
- Ogilvie, T.F. Second-order hydrodynamic effects on ocean platforms. In Proceedings of the International Workshop on Ship and Platform Motions, California, CA, USA, 26–28 October 1983. [Google Scholar]
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: Cambridge, UK, 1993. [Google Scholar]
- Ingard, U.; Pridmore-Brown, D.C. Scattering of Sound by Sound. J. Acoust. Soc. Am. 1956, 28, 367–369. [Google Scholar] [CrossRef]
- Westervelt, P.J. Scattering of Sound by Sound. J. Acoust. Soc. Am. 1957, 29, 199–203. [Google Scholar] [CrossRef]
- Lamb, H. The Dynamical Theory of Sound; E. Arnold & Co.: London, UK, 1931. [Google Scholar]
- Duarte, C.M.; Holmer, M.; Olsen, Y.; Soto, D.; Marbà, N.; Guiu, J.; Black, K.; Karakassis, I. Will the oceans help feed humanity? BioScience 2009, 59, 967–976. [Google Scholar] [CrossRef]
- Food and Agriculture Organization. Yearbook of Fishery Statistics Summary Tables 2013. Available online: ftp://ftp.fao.org/FI/STAT/summary/a1d.pdf (accessed on 14 September 2017).
- Makris, N.C.; Ratilal, P.; Symonds, D.T.; Jagannathan, S.; Lee, S.; Nero, R.W. Fish population and behavior revealed by instantaneous continental shelf-scale imaging. Science 2006, 311, 660–663. [Google Scholar] [CrossRef] [PubMed]
- Makris, N.C.; Ratilal, P.; Jagannathan, S.; Gong, Z.; Andrews, M.; Bertsatos, I.; Godø, O.R.; Nero, R.W.; Jech, J.M. Critical population density triggers rapid formation of vast oceanic fish shoals. Science 2009, 323, 1734–1737. [Google Scholar] [CrossRef] [PubMed]
- Jagannathan, S.; Bertsatos, I.; Symonds, D.; Chen, T.; Nia, H.T.; Jain, A.D.; Andrews, M.; Gong, Z.; Nero, R.; Ngor, L.; et al. Ocean acoustic waveguide remote sensing (OAWRS) of marine ecosystems. Mar. Ecol. Prog. Ser. 2009, 395, 137–160. [Google Scholar] [CrossRef]
- Gong, Z.; Andrews, M.; Jagannathan, S.; Patel, R.; Jech, J.M.; Makris, N.C.; Ratilal, P. Low-frequency target strength and abundance of shoaling Atlantic herring (Clupea harengus) in the Gulf of Maine during the Ocean Acoustic Waveguide Remote Sensing 2006 Experiment. J. Acoust. Soc. Am. 2010, 127, 104–123. [Google Scholar] [CrossRef] [PubMed]
- Haywood, J.; Ramaswamy, V.; Soden, B. Tropospheric aerosol climate forcing in clear-sky satellite observations over the oceans. Science 1999, 283, 1299–1303. [Google Scholar] [CrossRef] [PubMed]
- Monahan, E.C.; Spiel, D.E.; Davidson, K.L. A model of marine aerosol generation via whitecaps and wave disruption. In Oceanic Whitecaps; Springer: New York, NY, USA, 1986; pp. 167–174. [Google Scholar]
- Hoppel, W.; Frick, G.; Fitzgerald, J. Surface source function for sea-salt aerosol and aerosol dry deposition to the ocean surface. J. Geophys. Res. Atmos. 2002, 107, AAC 7-1–AAC 7-17. [Google Scholar] [CrossRef]
- Wanninkhof, R.; McGillis, W.R. A cubic relationship between air-sea CO2 exchange and wind speed. Geophys. Res. Lett. 1999, 26, 1889–1892. [Google Scholar] [CrossRef]
- Wenz, G.M. Acoustic ambient noise in the ocean: Spectra and sources. J. Acoust. Soc. Am. 1962, 34, 1936–1956. [Google Scholar] [CrossRef]
- Morse, P.; Ingard, K. Theoretical Acoustics; Princeton University Press: Princeton, NJ, USA, 1986. [Google Scholar]
- Morse, P.; Feshbach, H. Methods of Theoretical Physics; International Series in Pure and Applied Physics; McGraw-Hill: New York, NY, USA, 1953. [Google Scholar]
- Lai, Y.; Makris, N.C. Spectral and modal formulations for the Doppler-shifted field scattered by an object moving in a stratified medium. J. Acoust. Soc. Am. 2003, 113, 223–244. [Google Scholar] [CrossRef] [PubMed]
- Oestreicher, H.L. Field and Impedance of an Oscillating Sphere in a Viscoelastic Medium with an Application to Biophysics. J. Acoust. Soc. Am. 1951, 23, 707–714. [Google Scholar] [CrossRef]
- Chen, S.; Silva, G.T.; Kinnick, R.R.; Greenleaf, J.F.; Fatemi, M. Measurement of dynamic and static radiation force on a sphere. Phys. Rev. E 2005, 71, 056618. [Google Scholar] [CrossRef] [PubMed]
- Dean, L.W. Interactions between Sound Waves. J. Acoust. Soc. Am. 1962, 34, 1039–1044. [Google Scholar] [CrossRef]
- Steinberg, B. Principles of Aperture and Array System Design: Including Random and Adaptive Arrays; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1976. [Google Scholar]
- Bowman, J.J.; Senior, T.B.A.; Uslenghi, P.L.E. Electromagnetic and Acoustic Scattering by Simple Shapes (Revised Edition); Hemisphere Publishing Corporation: New York, NY, USA, 1987. [Google Scholar]
- Abramowitz, M.; Stegun, I.A. (Eds.) Handbook of Mathematical Functions; Dover Publications Inc.: Mineola, NY, USA, 1972. [Google Scholar]
- Baxter, S. The first order non-linear sound field of a two-frequency spherical source. J. Sound Vib. 1984, 94, 337–349. [Google Scholar] [CrossRef]
- Westervelt, P.J.; Radue, J. Nonlinear Diverging Waves. J. Acoust. Soc. Am. 1961, 33, 1672. [Google Scholar] [CrossRef]
- Jones, J.P. On the Scattering of Sound by Sound. Ph.D. Thesis, Brown University, Providence, RI, USA, 1971. [Google Scholar]
- Silva, G.T.; Mitri, F.G. Difference-frequency generation in vibro-acoustography. Phys. Med. Biol. 2011, 56, 5985–5993. [Google Scholar] [CrossRef] [PubMed]
- Morgan, K.E.; Allen, J.S.; Dayton, P.A.; Chomas, J.E.; Klibaov, A.L.; Ferrara, K.W. Experimental and theoretical evaluation of microbubble behavior: Effect of transmitted phase and bubble size. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2000, 47, 1494–1509. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Garcia, H.; Huang, W.; Tran, D.D.; Jain, A.D.; Yi, D.H.; Gong, Z.; Jech, J.M.; Godø, O.R.; Makris, N.C.; et al. Vast assembly of vocal marine mammals from diverse species on fish spawning ground. Nature 2016, 531, 366–370. [Google Scholar] [CrossRef] [PubMed]
- Koblitz, J.C.; Stilz, P.; Schnitzler, H.U. Source levels of echolocation signals vary in correlation with wingbeat cycle in landing big brown bats (Eptesicus fuscus). J. Exp. Biol. 2010, 213, 3263–3268. [Google Scholar] [CrossRef] [PubMed]
- Tjotta, J.N.; Tjotta, S. Interaction of sound waves. Part II: Plane wave and real beam. J. Acoust. Soc. Am. 1987, 82, 1429–1435. [Google Scholar] [CrossRef]
- Tjotta, J.N.; Tjotta, S. Interaction of sound waves. Part III: Two real beams. J. Acoust. Soc. Am. 1988, 83, 487–495. [Google Scholar] [CrossRef]
- Jarle Berntsen, J.N.T.; Tjotta, S. Interaction of sound waves. Part IV: Scattering of sound by sound. J. Acoust. Soc. Am. 1989, 86, 1968–1983. [Google Scholar] [CrossRef]
- Makris, N.C.; Ratilal, P.; Thierman, J. Coherent nonlinear scattering mechanisms for ultrasound-stimulated vibro-acoustic spectrography. J. Acoust. Soc. Am. 2002, 112, 2405. [Google Scholar] [CrossRef]
- Thierman, J. Sources of Difference Frequency Sound in a Dual-Frequency Imaging System with Implications for monitoring Thermal Surgery. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2004. [Google Scholar]
- Silva, G.T.; Chen, S.; Greenleaf, J.F.; Fatemi, M. Dynamic ultrasound radiation force in fluids. Phys. Rev. E 2005, 71, 056617. [Google Scholar] [CrossRef] [PubMed]
- Mitri, F.G.; Chen, S. Theory of dynamic acoustic radiation force experienced by solid cylinders. Phys. Rev. E 2005, 71, 016306. [Google Scholar] [CrossRef] [PubMed]
- Silva, G.T.; Chen, S.; Viana, L.P. Parametric Amplification of the Dynamic Radiation Force of Acoustic Waves in Fluids. Phys. Rev. Lett. 2006, 96, 234301. [Google Scholar] [CrossRef] [PubMed]
- Silva, G.T.; Bandeira, A. Difference-frequency generation in nonlinear scattering of acoustic waves by a rigid sphere. Ultrasonics 2013, 53, 470–478. [Google Scholar] [CrossRef] [PubMed]
- Plekanov, G.; Soluyan, S. Emission of harmonic and combination frequency waves by air bubbles. Sov. Phys. Acoust. 1971, 18, 396–398. [Google Scholar]
- Keller, J.B.; Miksis, M. Bubble oscillations of large amplitude. J. Acoust. Soc. Am. 1980, 68, 628–633. [Google Scholar] [CrossRef]
- Kluzek, Z.; Soustova, I.; Sutin, A. Nonlinear incoherent scattering of acoustic waves by a bubble layer. Acoust. Phys. 1996, 42, 568–575. [Google Scholar]
- Ostrovsky, L.A.; Sutin, A.M.; Soustova, I.A.; Matveyev, A.L.; Potapov, A.I.; Kluzek, Z. Nonlinear scattering of acoustic waves by natural and artificially generated subsurface bubble layers in sea. J. Acoust. Soc. Am. 2003, 113, 741–749. [Google Scholar] [CrossRef] [PubMed]
- King, L. On the acoustic radiation pressure on spheres. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1934, 147, 212. [Google Scholar] [CrossRef]
- Newman, J. Marine Hydrodynamics; The MIT Press: Cambridge, MA, USA, 1977. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Liu, Y.; Ratilal, P.; Cho, B.; Makris, N.C. Active Nonlinear Acoustic Sensing of an Object with Sum or Difference Frequency Fields. Remote Sens. 2017, 9, 954. https://doi.org/10.3390/rs9090954
Zhang W, Liu Y, Ratilal P, Cho B, Makris NC. Active Nonlinear Acoustic Sensing of an Object with Sum or Difference Frequency Fields. Remote Sensing. 2017; 9(9):954. https://doi.org/10.3390/rs9090954
Chicago/Turabian StyleZhang, Wenjun, Yuming Liu, Purnima Ratilal, Byunggu Cho, and Nicholas C. Makris. 2017. "Active Nonlinear Acoustic Sensing of an Object with Sum or Difference Frequency Fields" Remote Sensing 9, no. 9: 954. https://doi.org/10.3390/rs9090954
APA StyleZhang, W., Liu, Y., Ratilal, P., Cho, B., & Makris, N. C. (2017). Active Nonlinear Acoustic Sensing of an Object with Sum or Difference Frequency Fields. Remote Sensing, 9(9), 954. https://doi.org/10.3390/rs9090954