
Airborne LiDAR and Aerial Imagery to Assess Potential Burrow Locations for the Desert Tortoise (Gopherus agassizii)



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
- Use LiDAR and imagery data to estimate percent vegetation cover and species richness of dominant perennial plant species across the study area.
- Associate burrow locations with vegetation and landscape metrics that were obtained using LiDAR and aerial imagery.
2. Materials and Methods
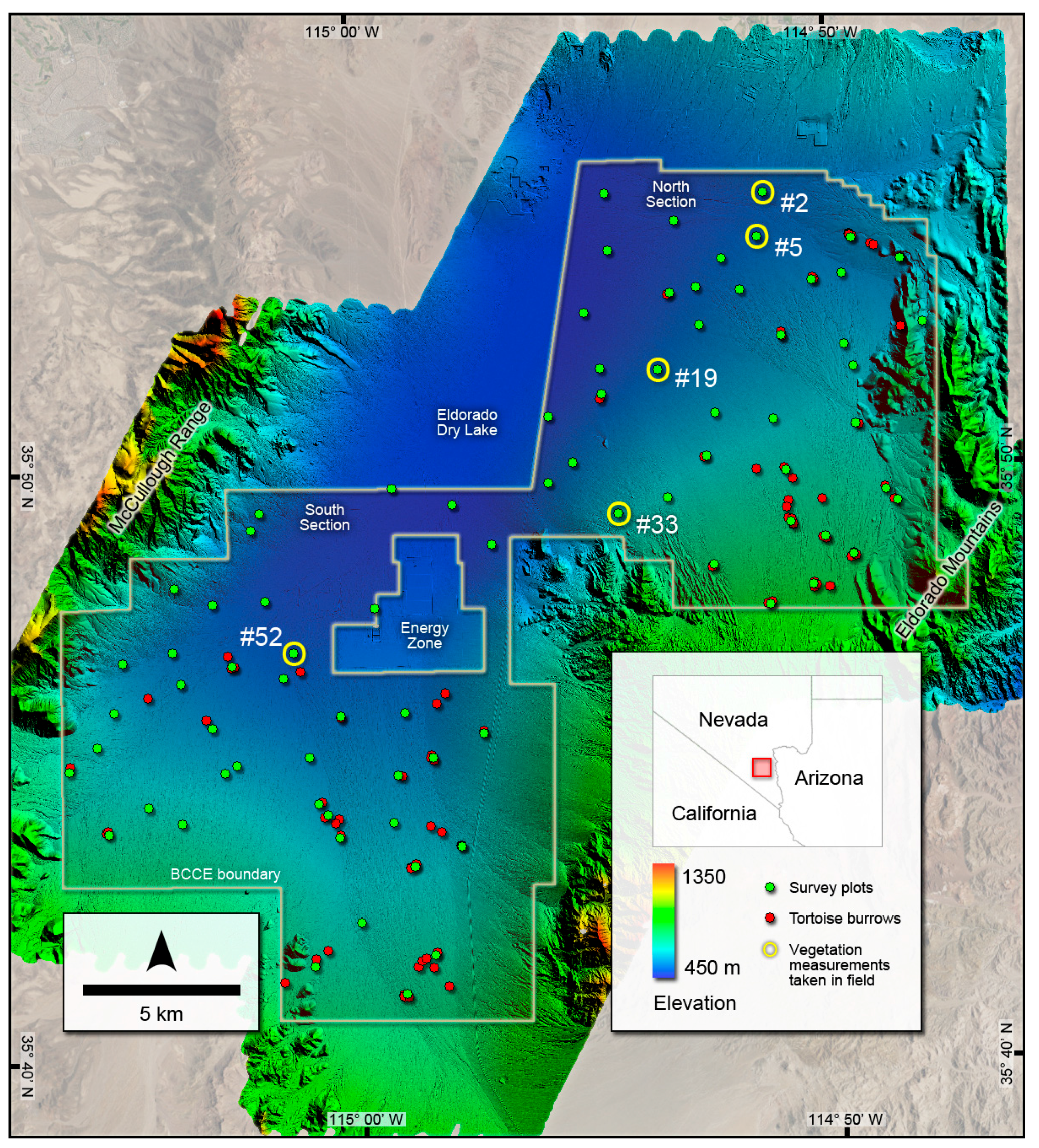
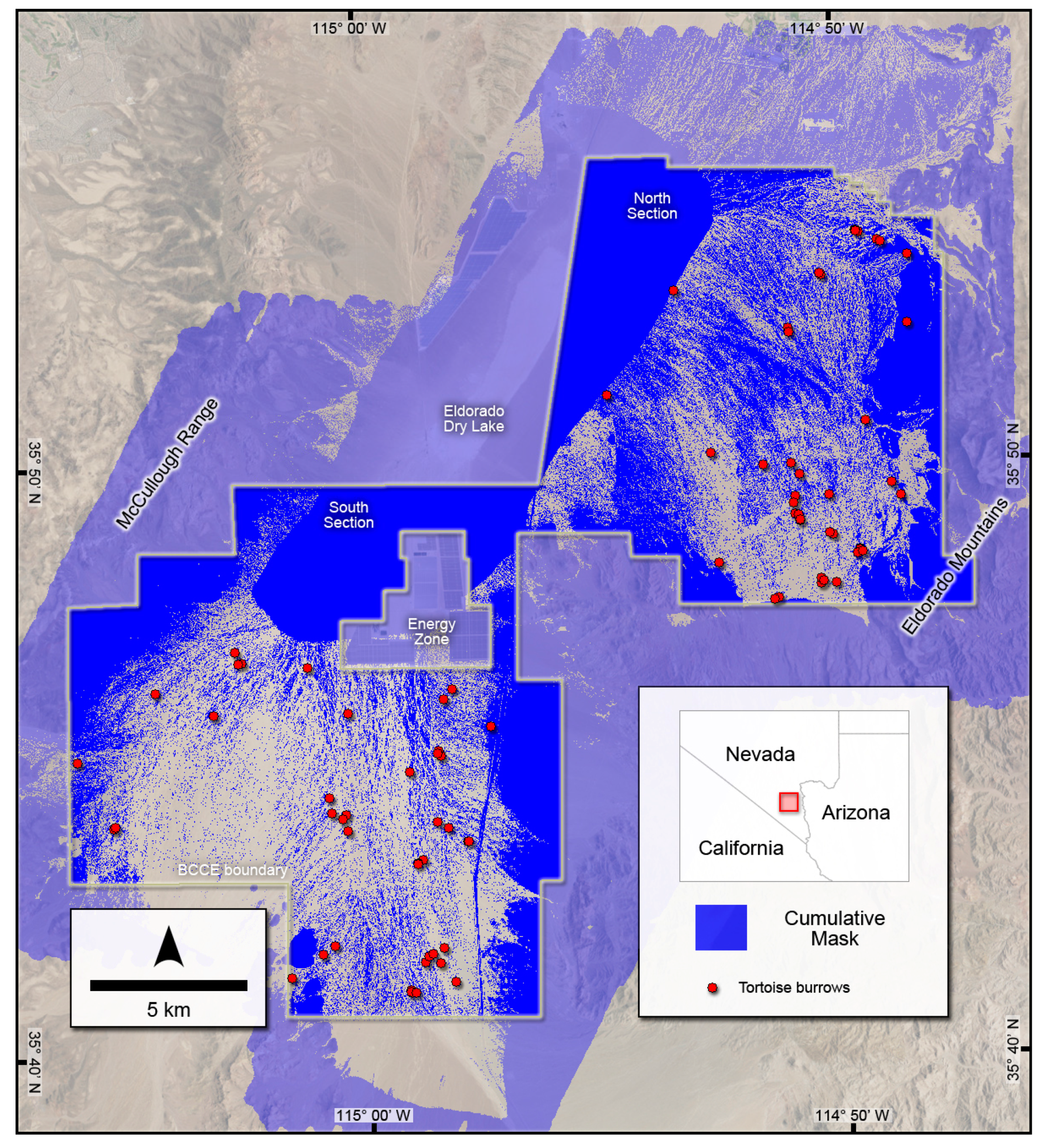
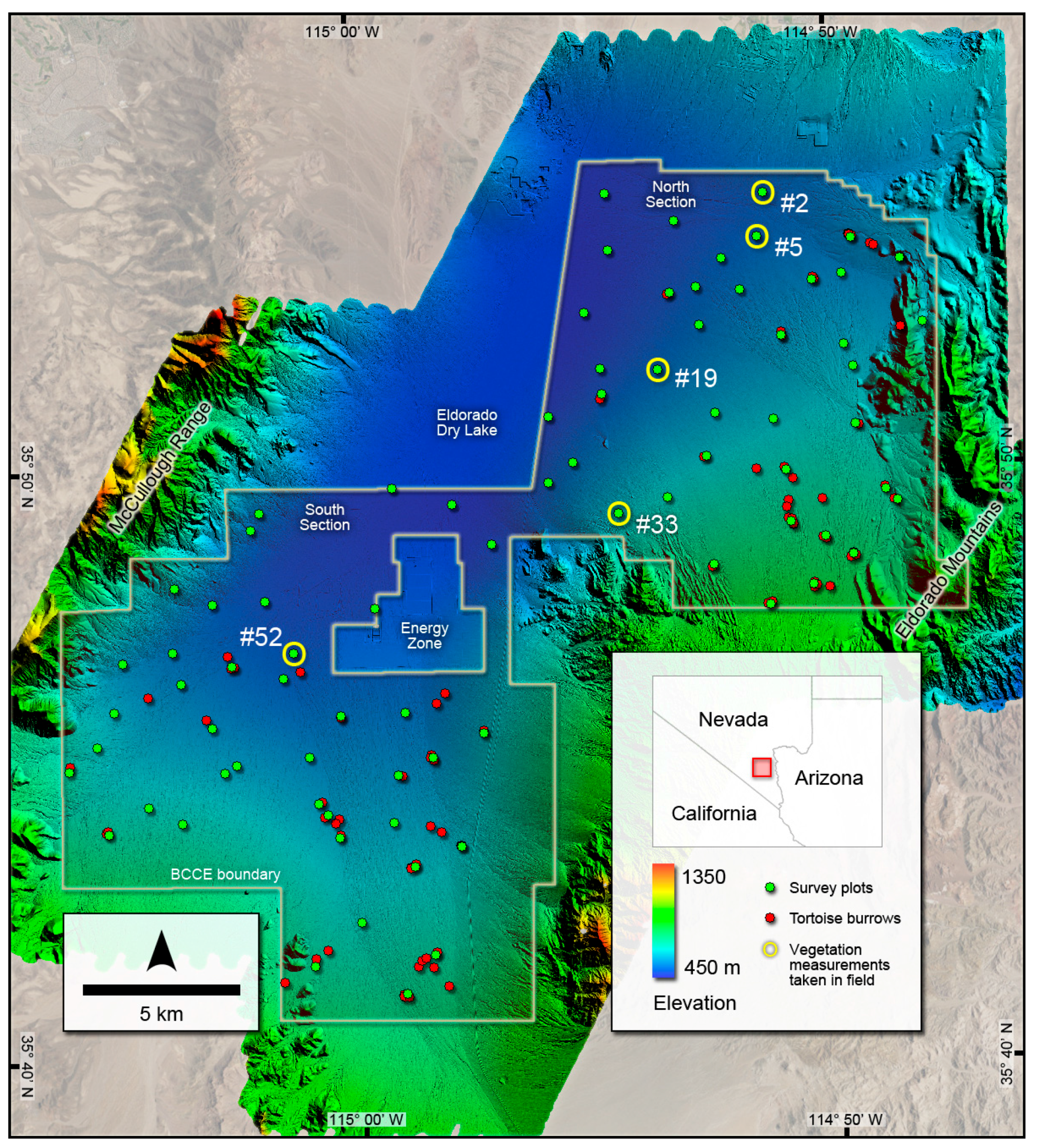
2.1. Field Location
2.2. LiDAR Data and Image Acquisition
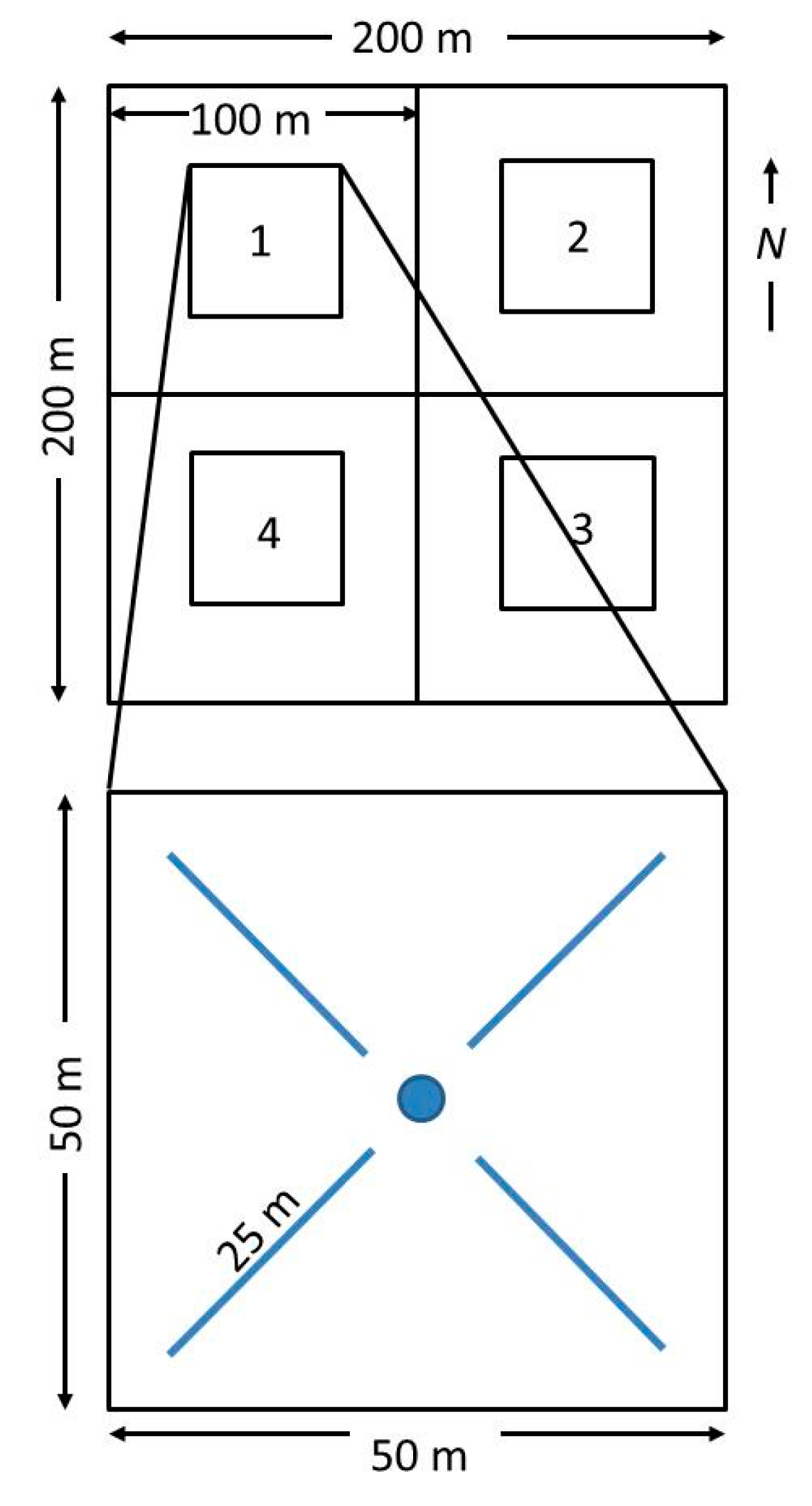
2.3. Field Measurements
2.4. Determining Shrub Presence and Canopy Characteristics
2.5. Establishing Geomorphic Parameters
2.6. Statistical Analyses
3. Results and Discussion
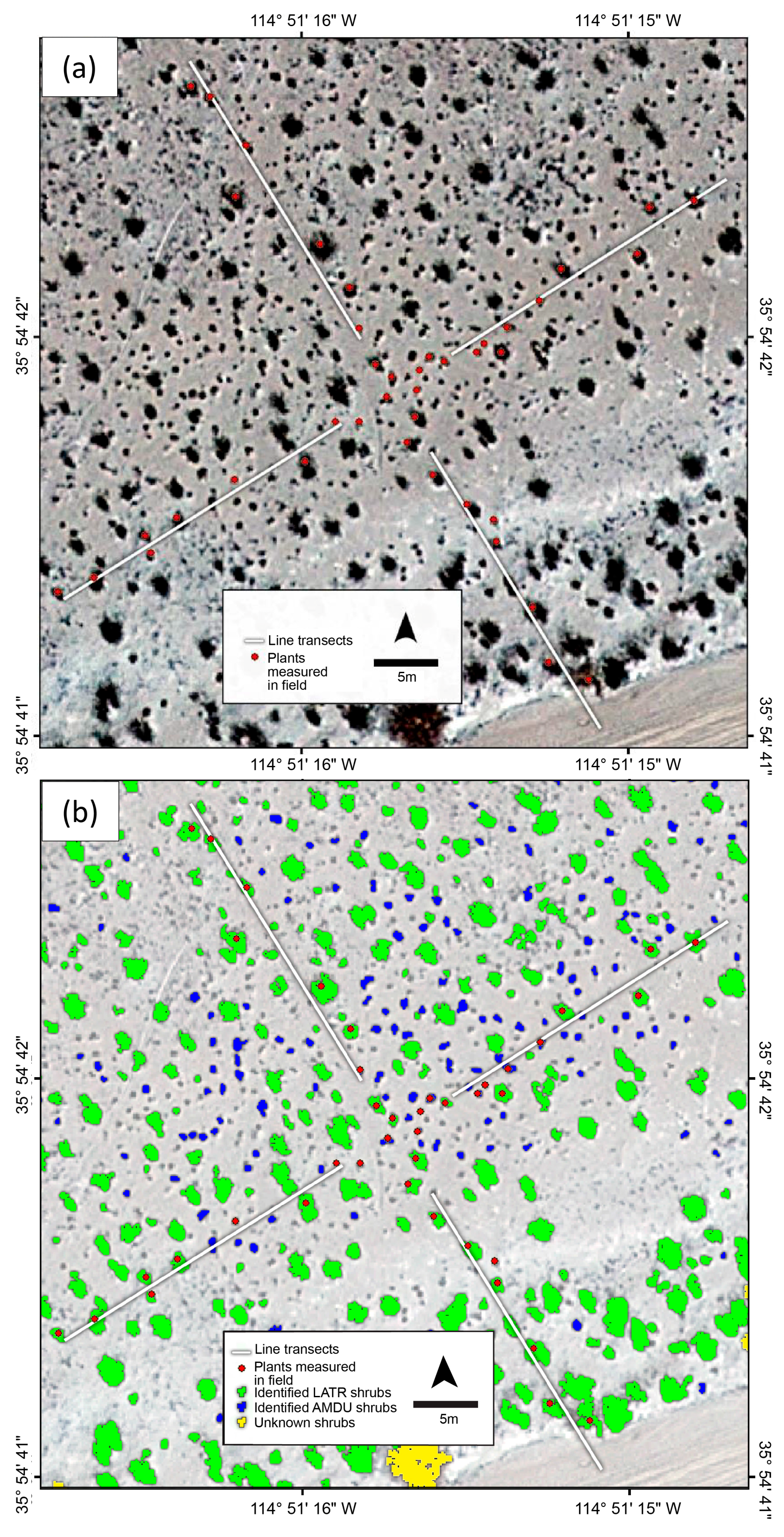
3.1. Shrub Presence and Canopy Characteristics
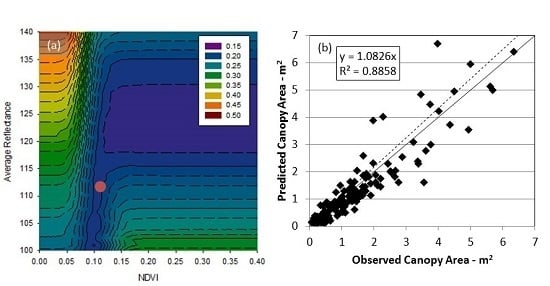
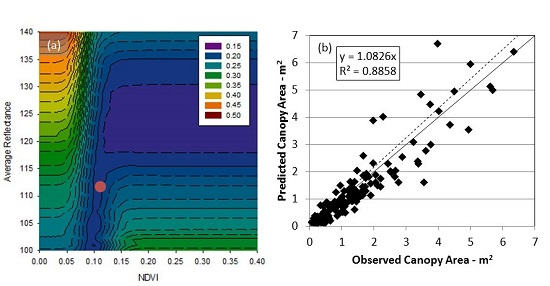
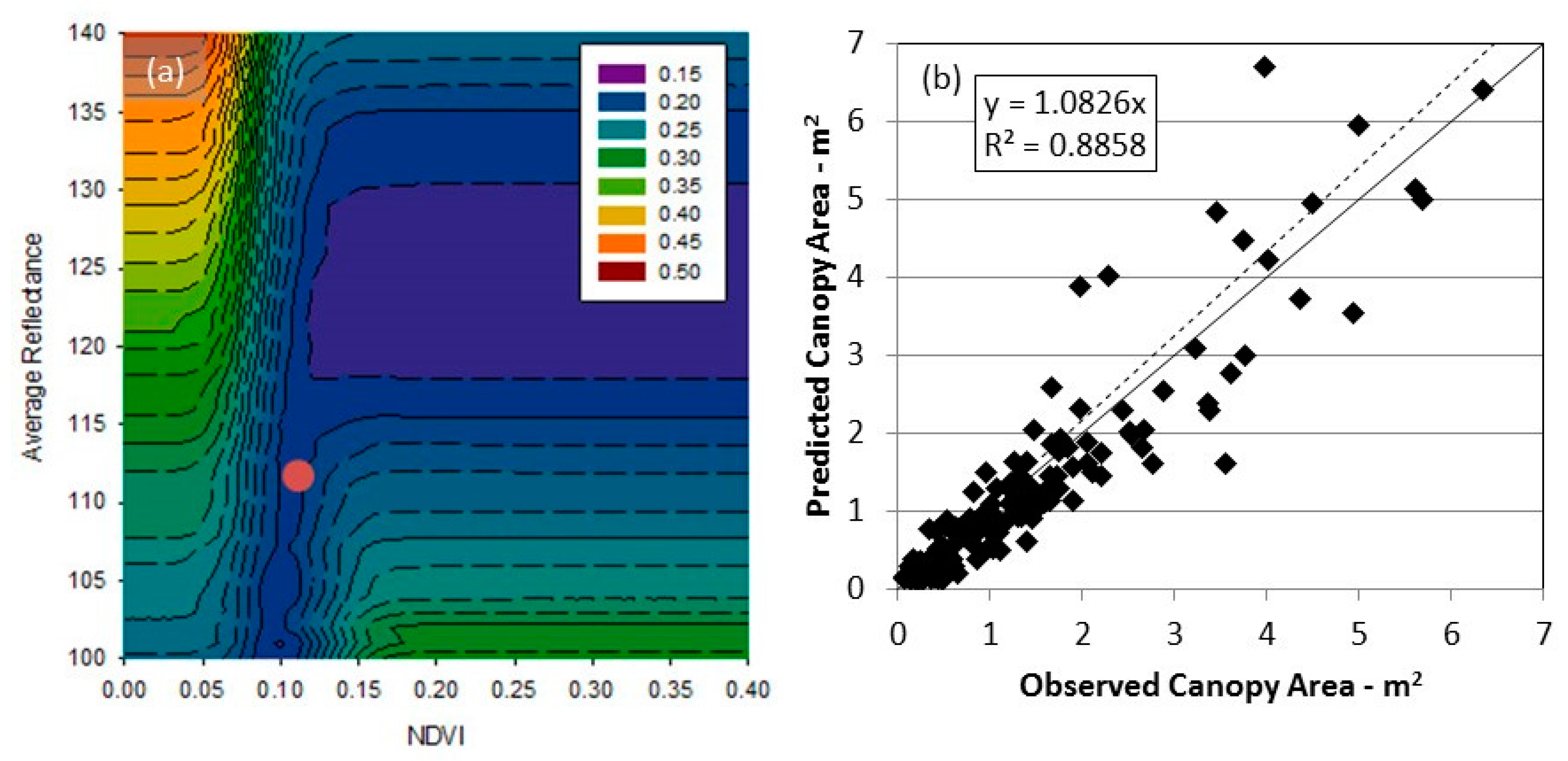
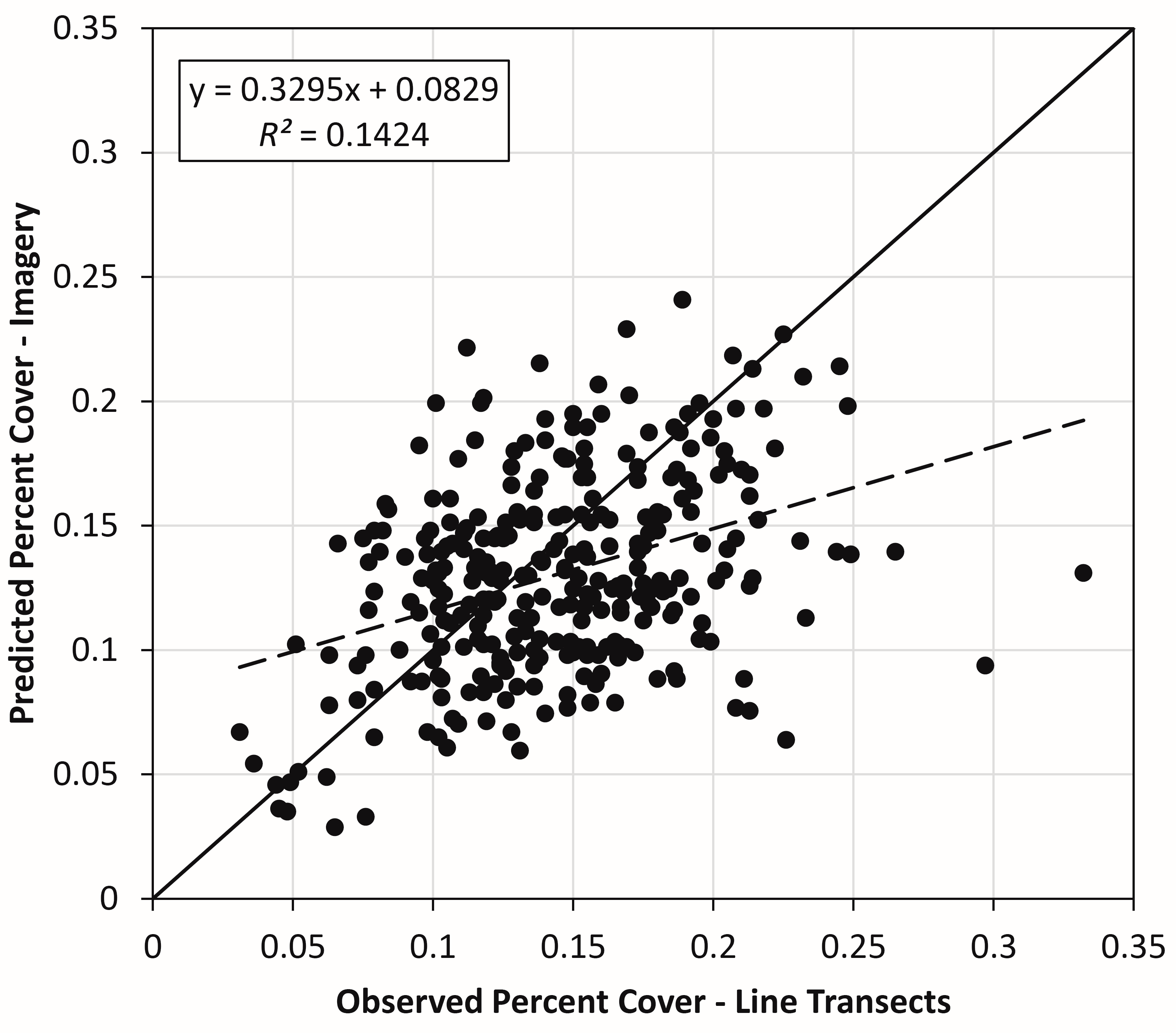
3.2. Comparison between Imagery-Derived Estimates and Ground-Based Measurements of Canopy Area and Percent Coverage
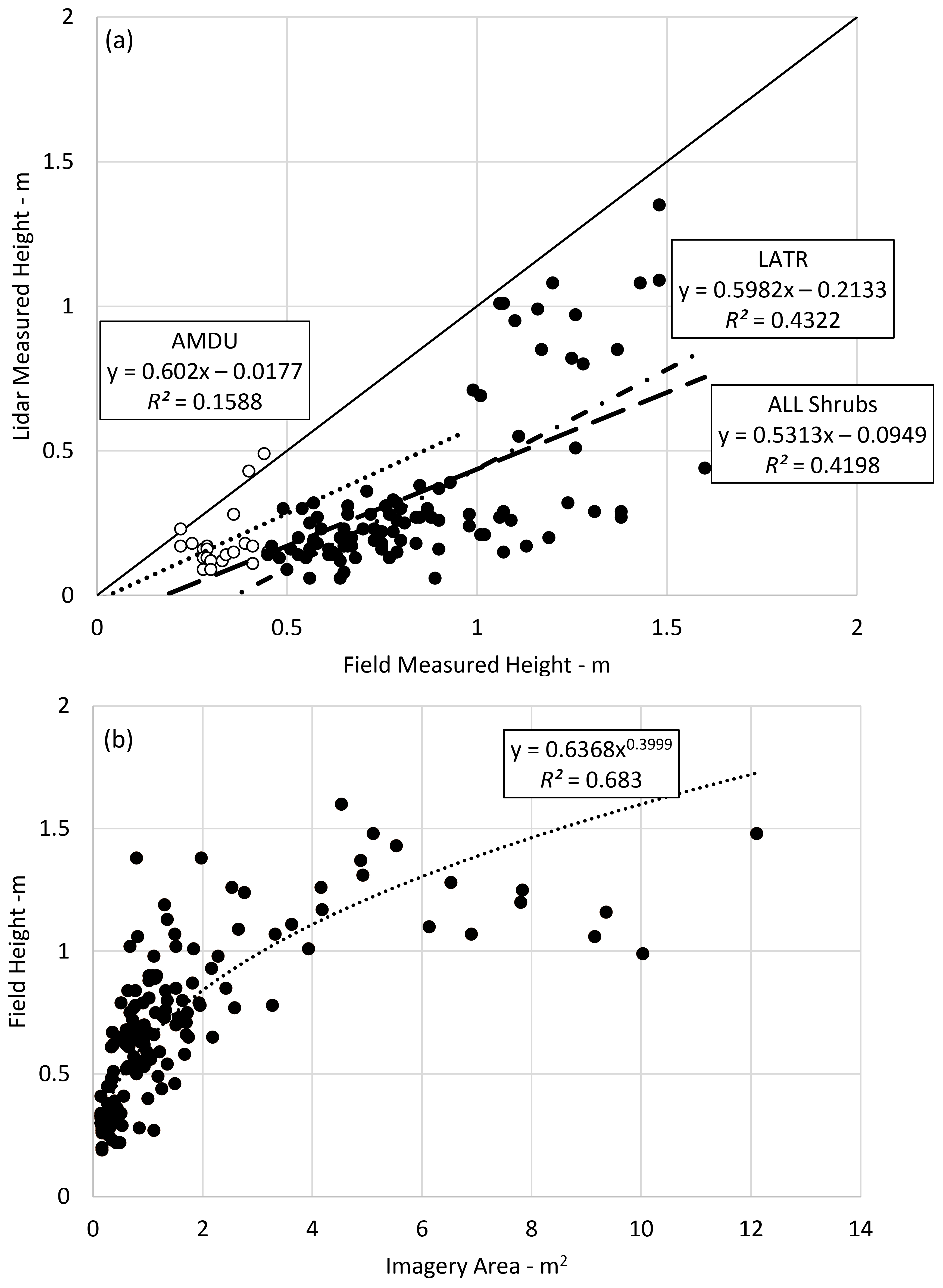
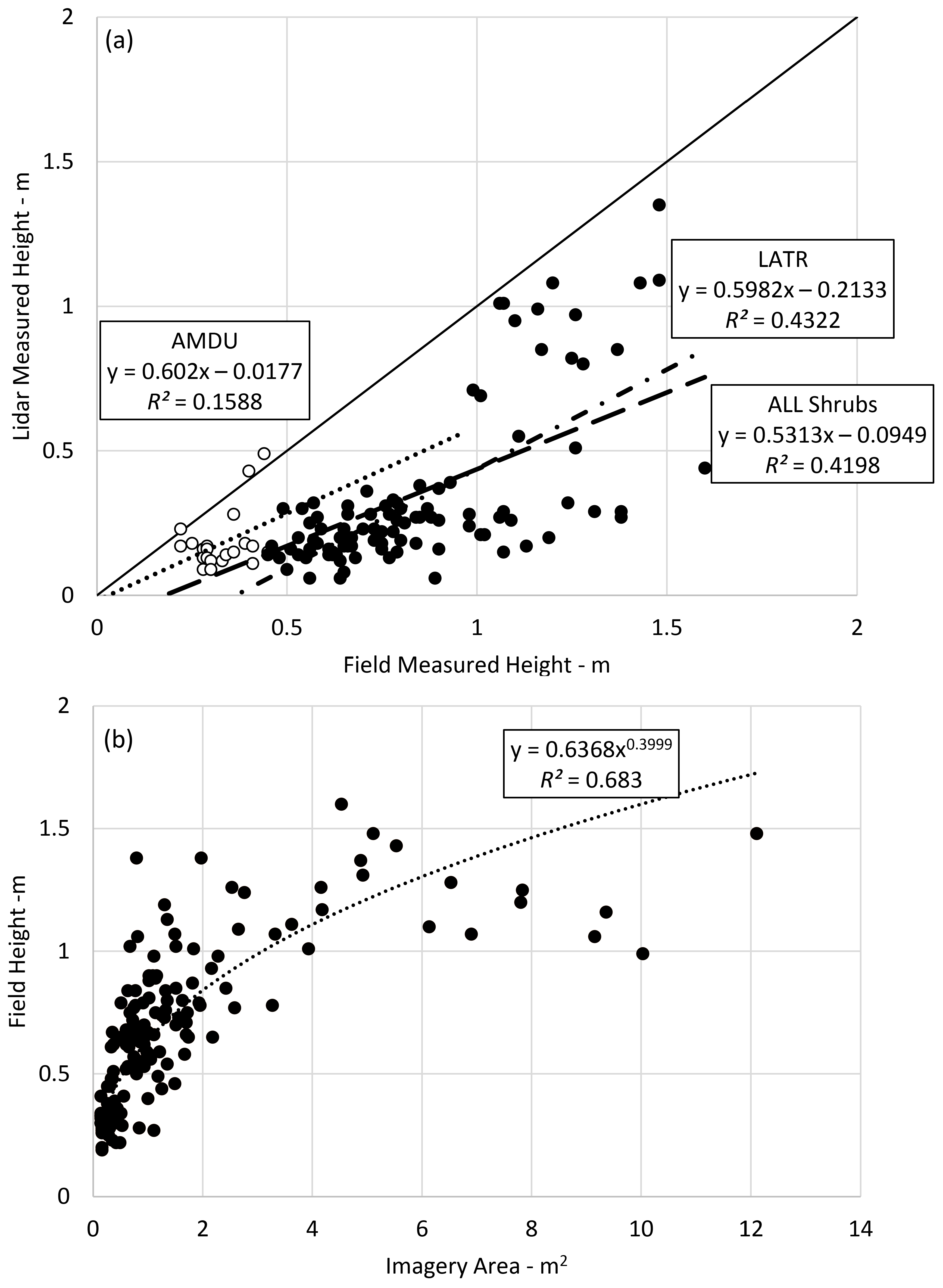
3.3. Comparison between LiDAR-Derived Estimates and Ground-Based Measurements of Shrub Height
3.4. Correlating Soil and Vegetation Characteristics to Observed Burrows
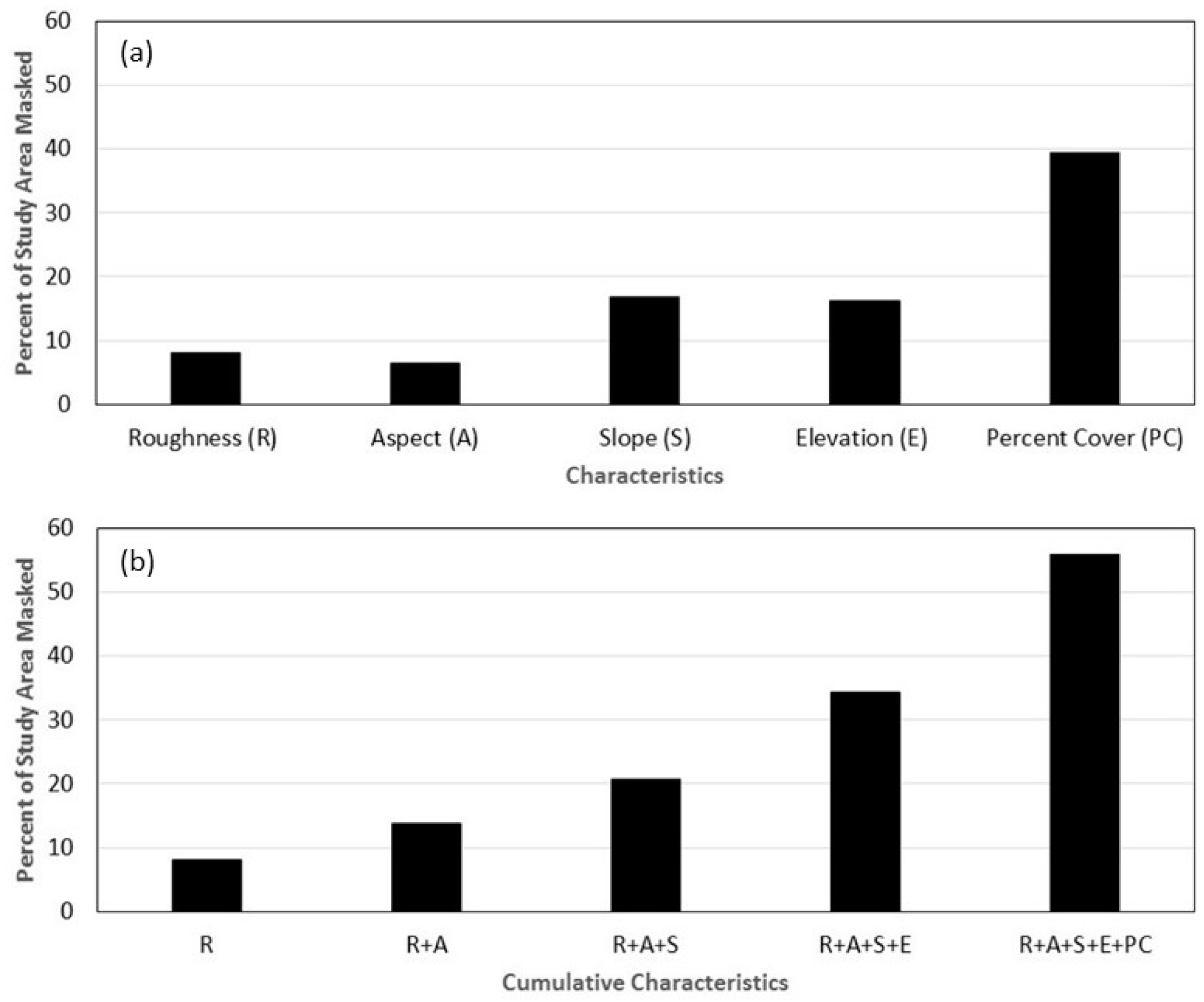
- Burrows found only on surfaces with roughness < 1.788;
- Burrows found only on slopes shallower than 4.6%;
- Burrows found only when aspect < 126° or >222°; north is 0° rotated clockwise;
- Burrows found only on land with elevation between 559 and 845 m above mean sea level;
- Approximately 25% of burrows found in areas with percent ground cover < 10%.
4. Conclusions
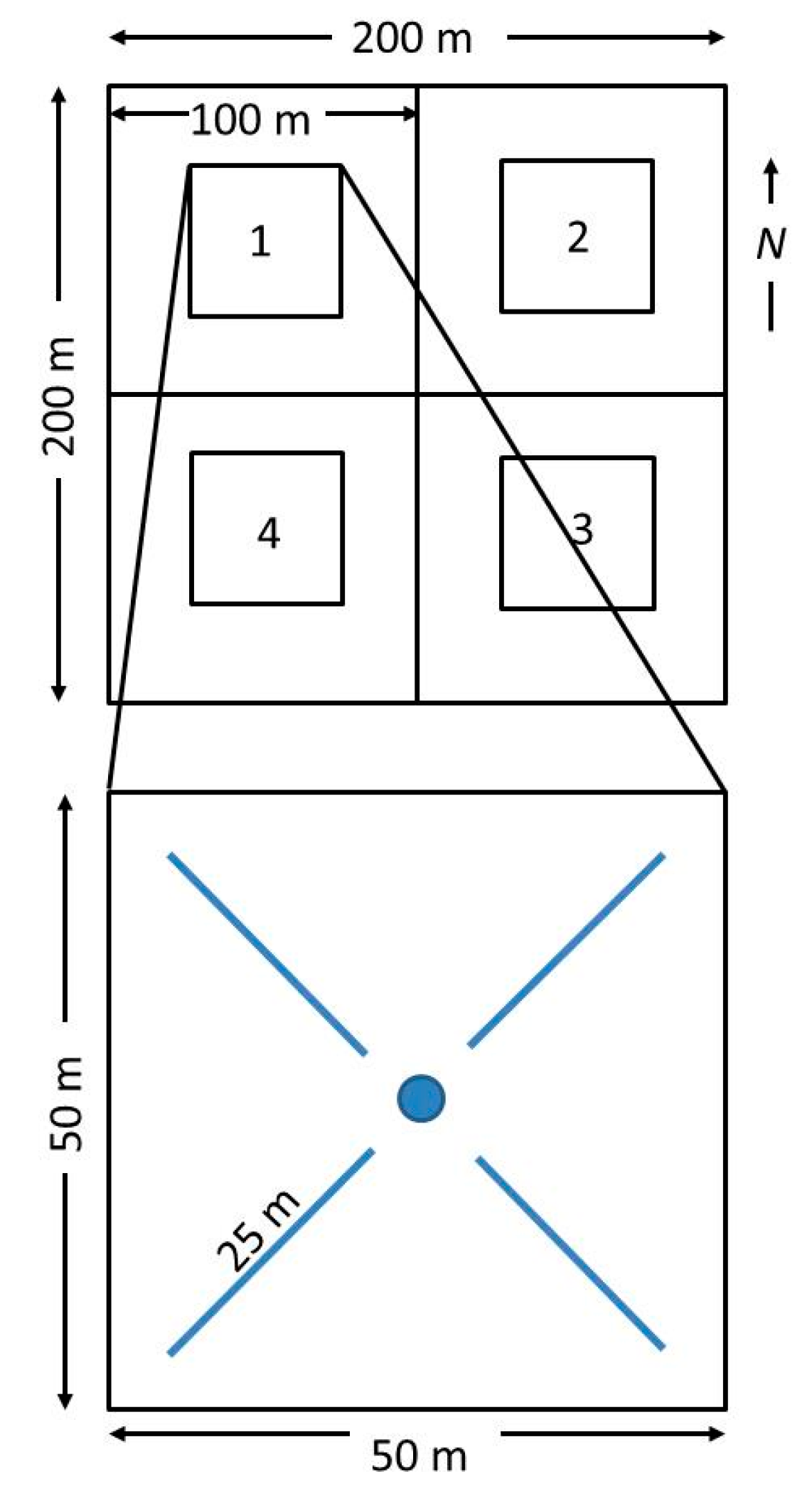
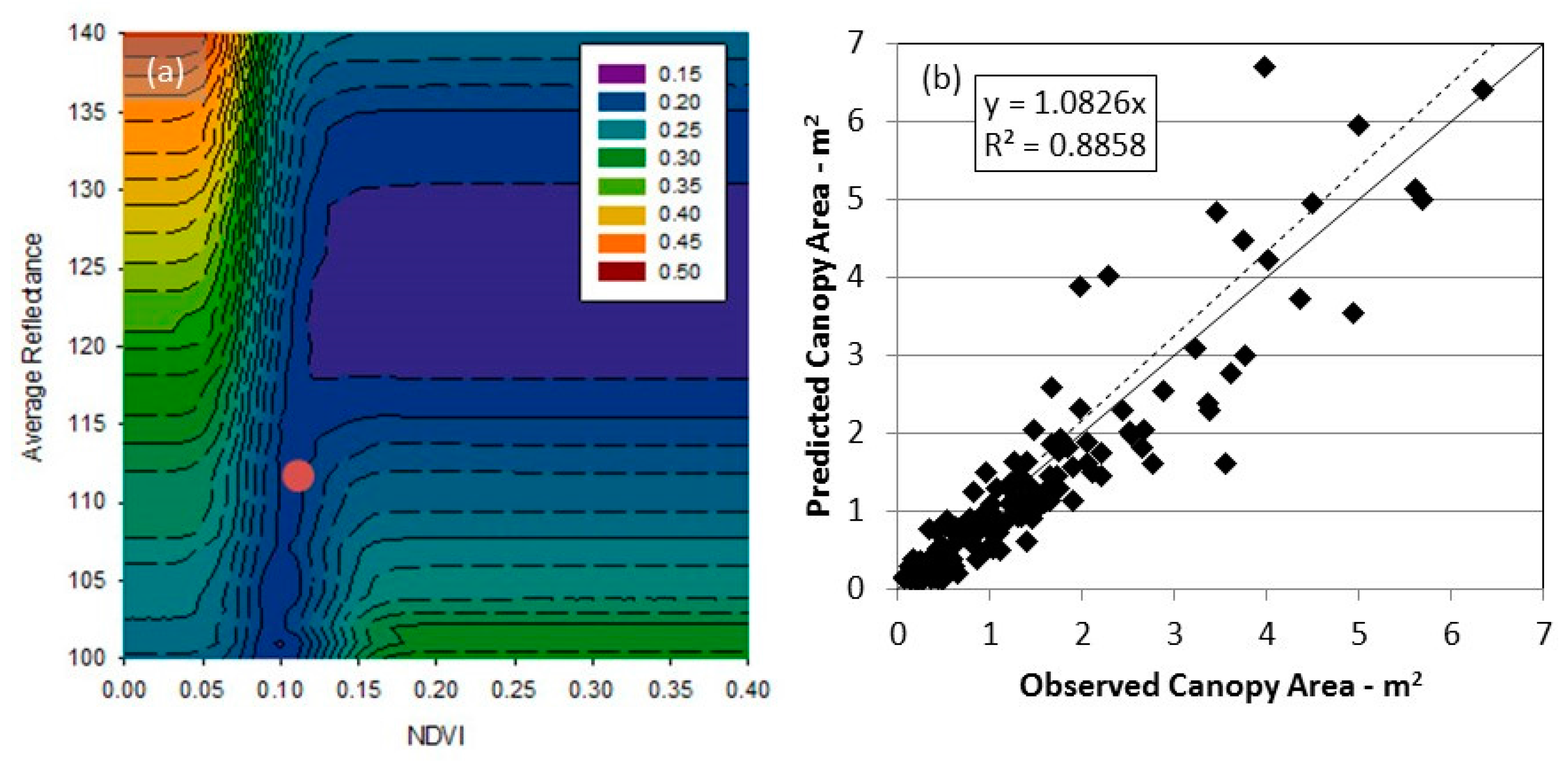
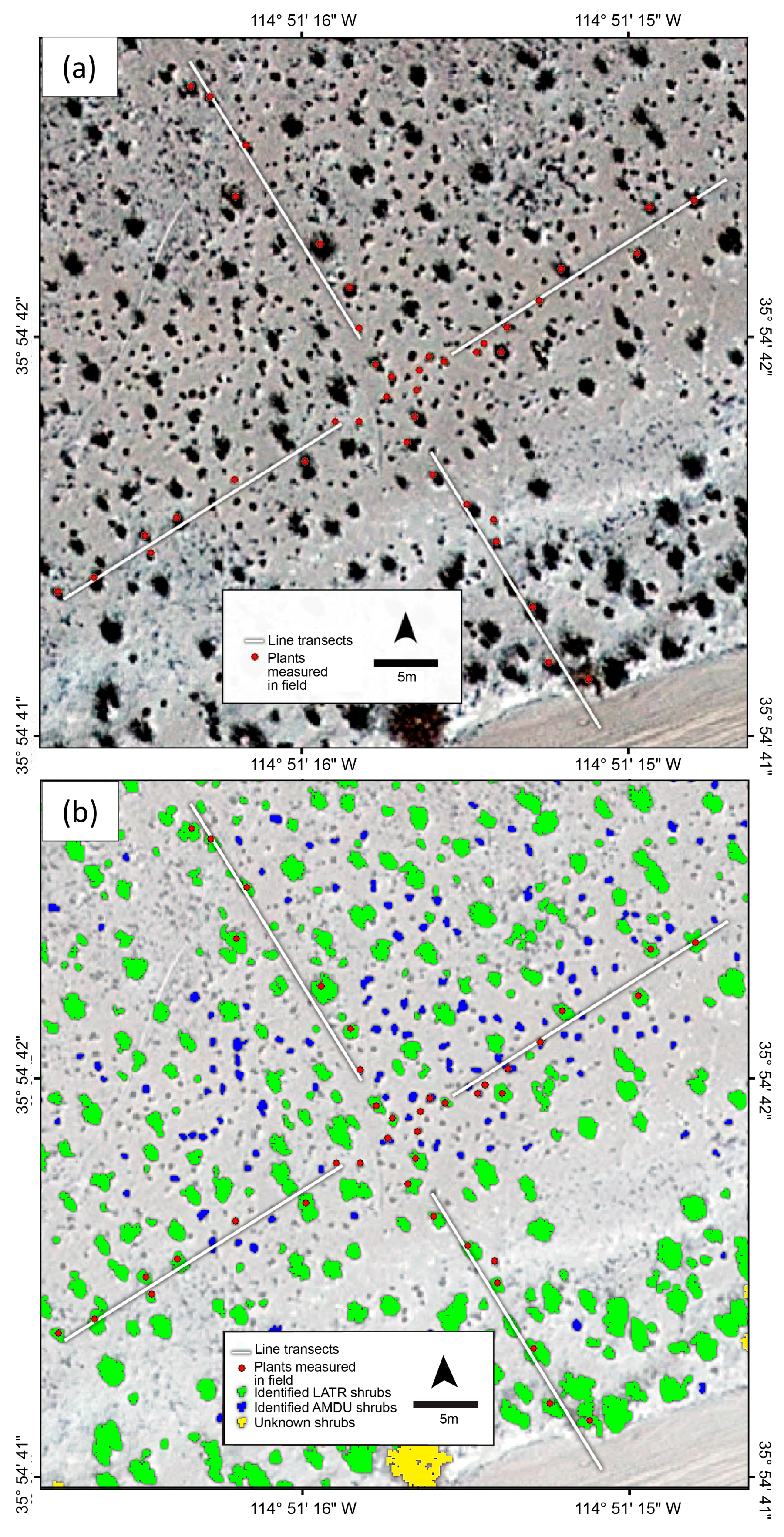
- The 80 field plots with line transects provided excellent data to which we could compare imagery-derived canopy area and percent ground cover. Comparisons of canopy areas of individual shrubs (field-measured versus imagery-estimated) were excellent and highly correlated (R2 = 0.9282), but comparisons broke down when comparing percent ground cover derived from line transects versus imagery. This is because the line transects only sample a small number of shrubs without measurements of canopy areas, whereas the imagery yielded canopy areas of every shrub in the target area greater than 0.1161 m2.
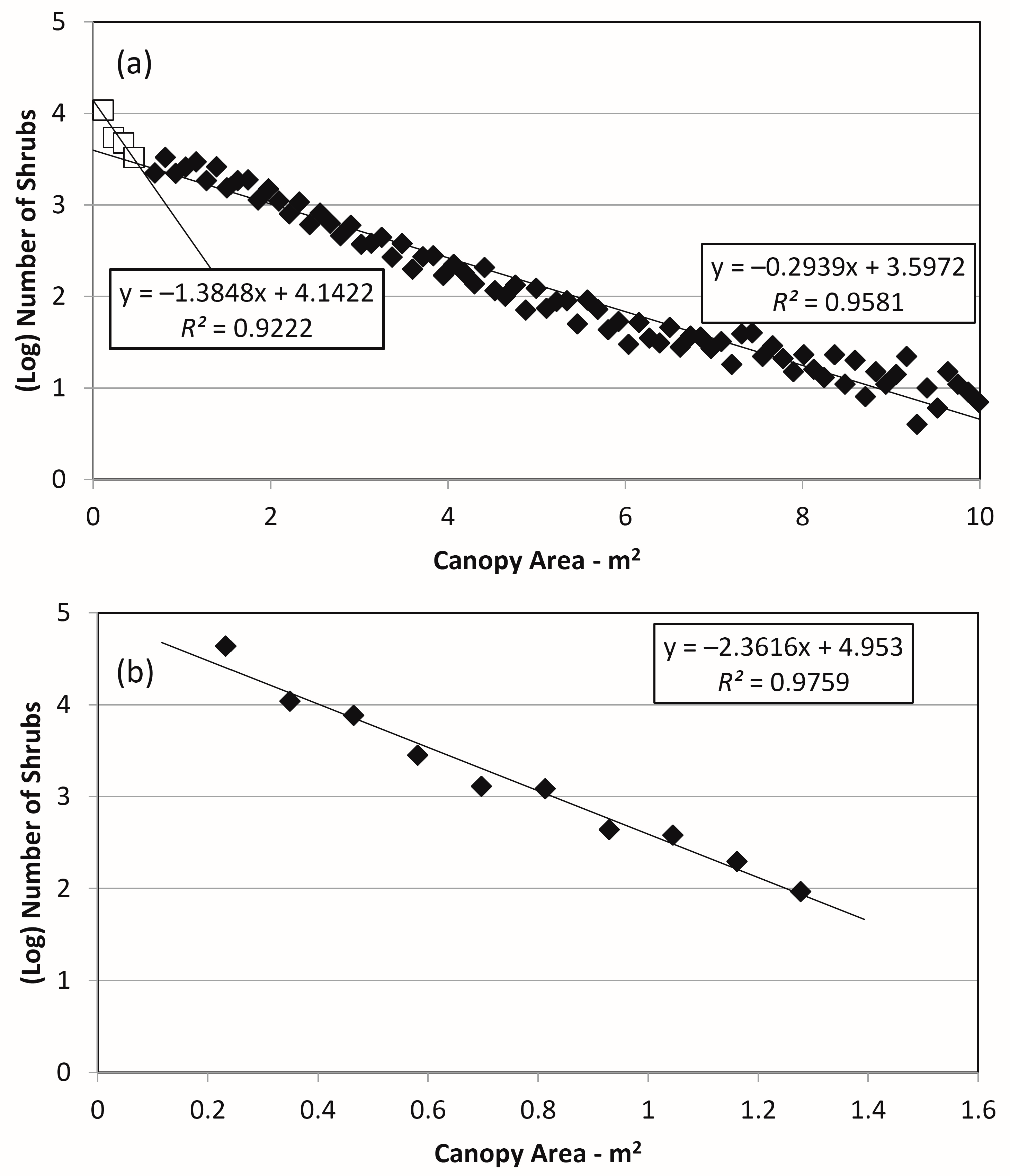
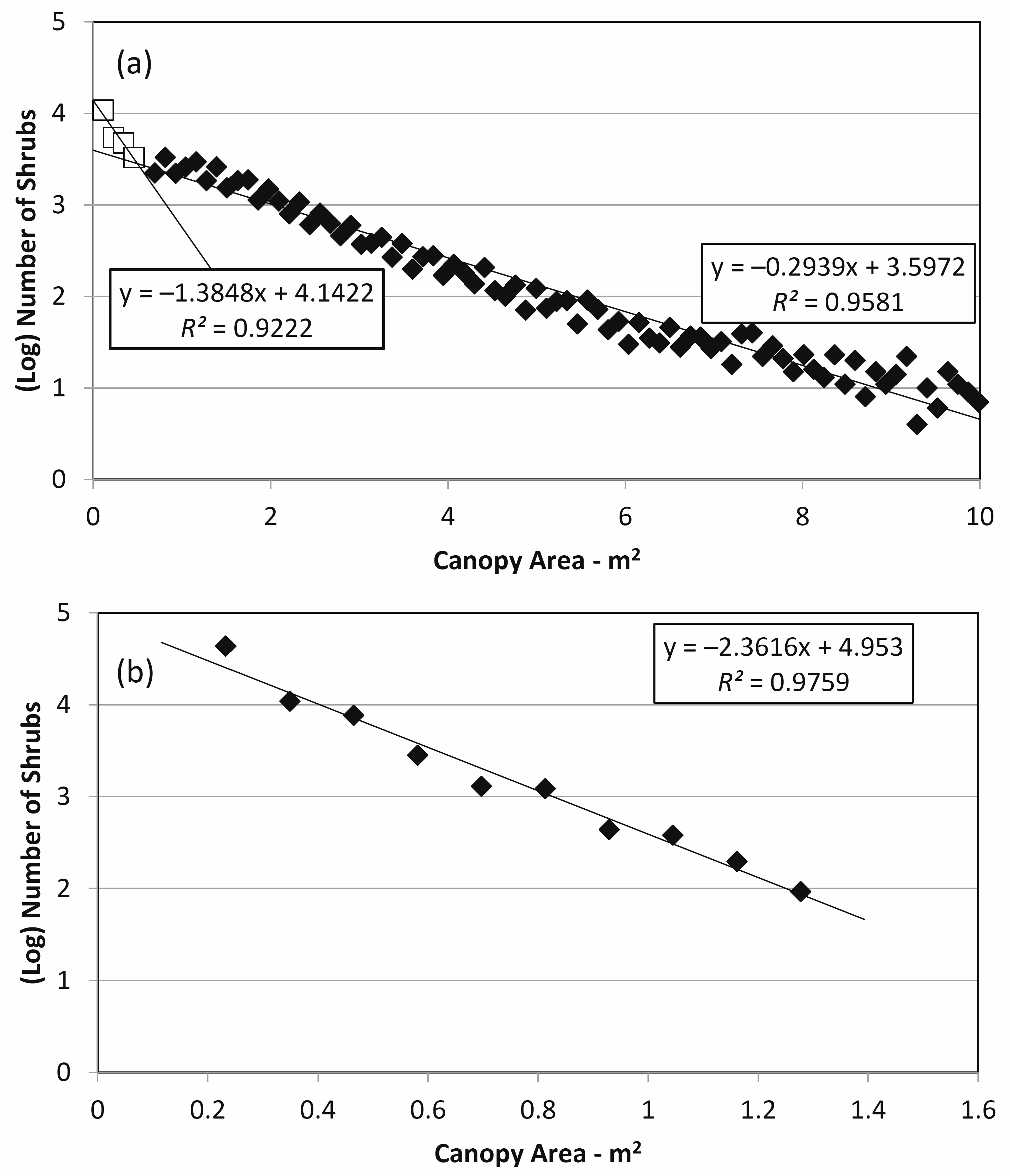
- We estimated the number of smaller shrubs below a “detection limit” of 0.1161 m2 and found that the cumulative canopy areas for these small shrubs improved the comparison of survey-wide, average percent ground cover. Our estimate of a percent ground cover of 13.92% compares favorably with the 14.52% estimated from the 1248 line transects.
- Use of LiDAR returns for estimating canopy height low-biased the results by ~60%. Underestimation using LiDAR has been reported by others [40,41,42]. Specifically, Sankey et al. [42] conducted field vegetation surveys, including L. tridentata shrubs, in which shrub height and area were measured. With repeated measurements using a ground-based LiDAR system (over both time and multiple scanning locations), they noted an underestimation of LiDAR-based L. tridentata shrub height of approximately 32% for single-scan positions and 16% for multiple-scan locations. Luscombe et al. [41] compared airborne LiDAR to terrestrial laser scanning in a peatland ecosystem and also found a systematic underestimation of canopy heights, as measured relative to mean sea level (not shrub-specific heights).
- The use of aerial imagery for estimating vegetation characteristics, and of LiDAR data for estimating terrain characteristics, leveraged the benefits of both methods, yielding information that helps identify areas where tortoise burrows are more likely to be found. Though not a modeling approach per se, we showed that 55.9% of the 35,500-ha area is less likely to be favored for burrowing, using only five vegetation and terrain characteristics (roughness, aspect, slope percent, elevation, and percent ground cover). Other factors such as soil friability, distance to roads, and invasive cover could further refine these potential locations.
- The success of the remote-sensing work reported here on identifying burrows is strongly dependent on the visual identification of burrows for ground truthing (i.e., portions of the study were masked because of a lack of visually identified burrows, not because burrows were verified as being absent). Therefore, it is important to emphasize the need for ecological data to better refine those locations most likely to host tortoise burrows and, hence, to prioritize areas to search.We recognize that habitat preferences for the desert tortoise (Gopherus agassizii) are dependent on many factors not considered in this study, particularly forage, suitability for breeding, refuge, etc.; thus, the results presented here should be taken in their proper context and applied to the challenging issue of habitat suitability with caution.
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
References
- U.S. Endangered Species Act of 1973. Available online: http://www.nmfs.noaa.gov/pr/pdfs/laws/esa.pdf (accessed on 1 May 2017).
- U.S. Fish and Wildlife Service. Endangered and threatened wildlife and plants: Determination of threatened status for the Mojave population of the desert tortoise. Federal Register 1990, 55, 12178–12191. [Google Scholar]
- Abella, S.R.; Berry, K.H. Enhancing and restoring habitat for the desert tortoise. J. Fish Wildl. Manag. 2016, 7, 255–279. [Google Scholar] [CrossRef]
- Belnap, J.; Warren, S.D. Patton’s tracks in the Mojave Desert, USA: An ecological legacy. Arid Land Res. Manag. 2002, 16, 245–258. [Google Scholar] [CrossRef]
- Caldwell, T.G.; McDonald, E.V.; Young, M.H. Soil disturbance and hydrologic response at the National Training Center, Ft. Irwin, California. J. Arid Environ. 2006, 67, 456–472. [Google Scholar] [CrossRef]
- Efroymson, R.A.; Peterson, M.J.; Jones, D.S.; Suter, G.W. The Apache Longbow-Hellfire missile test at Yuma Proving Ground: Introduction and problem formulation for a multiple stressor risk assessment. Human Ecol. Risk Assess. 2008, 14, 854–870. [Google Scholar] [CrossRef]
- Caldwell, T.G.; McDonald, E.V.; Young, M.H. The seedbed microclimate and active revegetation of disturbed lands in the Mojave Desert. J. Arid Environ. 2009, 73, 563–573. [Google Scholar] [CrossRef]
- Webb, R.H.; Belnap, J.; Thomas, K.A. Natural Recovery from Severe Disturbance in the Mojave Desert. In The Mojave Desert: Ecosystem Processes and Sustainability; Webb, R.H., Fenstermaker, L.F., Heaton, J.S., Hughson, D.L., McDonald, E.V., Eds.; University of Nevada Press: Reno, NV, USA, 2009; pp. 343–377. [Google Scholar]
- Hernandez, R.R.; Easter, S.B.; Murphy-Mariscal, M.L.; Maestre, F.T.; Tavassoli, M.; Allen, E.B.; Barrows, C.W.; Belnap, J.; Ochoa-Hueso, R.; Ravi, S.; et al. Environmental impacts of utility-scale solar energy. Renew. Sust. Energ. Rev. 2014, 29, 766–779. [Google Scholar] [CrossRef]
- Berry, K.H.; Coble, A.A.; Yee, J.L.; Mack, J.S.; Perry, W.M.; Anderson, K.M.; Brown, M.B. Distance to human populations influences epidemiology of respiratory disease in desert tortoises. J. Wildl. Manag. 2015, 79, 122–136. [Google Scholar] [CrossRef]
- Berry, K.H.; Yee, J.L.; Coble, A.A.; Perry, W.M.; Shields, T.A. Multiple factors affect a population of Agassiz’s Desert Tortoise (Gopherus agassizii) in the northwestern Mojave Desert. Herpetol. Monogr. 2013, 27, 87–109. [Google Scholar] [CrossRef]
- Baxter, R.G. Patial distribution of desert tortoises (Gopherus agassizii) at Twentynine Palms, California: Implications for relocations. In Management of Amphibians, Reptiles, and Small Mammals in North America; Szoro, R.C., Siverson, K.E., Patton, D.R., Eds.; USDA: Washington, DC, USA, 1988; pp. 180–189. [Google Scholar]
- Lovich, J.E.; Daniels, R. Environmental characteristics of desert tortoise (Gopherus agassizii) burrow locations in an altered industrial landscape. Chelonian Conserv. Biol. 2000, 3, 714–721. [Google Scholar]
- Riedle, J.D.; Averill-Murray, R.C.; Lutz, C.L.; Bolen, D.K. Habitat use by desert tortoises (Gopherus agassizii) on alluvial fans in the Sonoran Desert, south-central Arizona. Copeia 2008, 2, 414–420. [Google Scholar] [CrossRef]
- Bergen, K.M.; Goetz, S.J.; Dubayah, R.O.; Henebry, G.M.; Hunsaker, C.T.; Imhoff, M.L.; Nelson, R.F.; Parker, G.G.; Radeloff, V.C. Remote sensing of vegetation 3-D structure for biodiversity and habitat: Review and implications for LiDAR and radar spaceborne missions. J. Geophys. Res. Biogeosci. 2009, 114. [Google Scholar] [CrossRef]
- Galik, C.S. Contributions of LiDAR to Ecosystem Service Planning and Markets: Assessing the Costs and Benefits of Investment. Available online: https://nicholasinstitute.duke.edu/ecosystem/publications/contributions-lidar-ecosystem-service-planning-and-markets-assessing-costs-and-benefits (accessed on 1 May 2017).
- Harpold, A.A.; Marshall, J.A.; Lyon, S.W.; Barnhart, T.B.; Fisher, B.A.; Donovan, M.; Brubaker, K.M.; Crosby, C.J.; Glenn, N.F.; Glennie, C.L.; et al. Laser vision: LiDAR as a transformative tool to advance critical zone science. Hydrol. Earth Syst. Sci. 2015, 19, 2881–2897. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Parker, G.G.; Harding, D.J. LiDAR remote sensing for ecosystem studies. Bioscience 2002, 52, 19–30. [Google Scholar] [CrossRef]
- Goetz, S.J.; Steinberg, D.; Betts, M.G.; Holmes, R.T.; Doran, P.J.; Dubayah, R.; Hofton, M. LiDAR remote sensing variables predict breeding habitat of a Neotropical migrant bird. Ecology 2010, 91, 1569–1576. [Google Scholar] [CrossRef] [PubMed]
- Catano, C.P.; Angelo, J.J.; Stout, I.J. Sample grain influences the functional relationship between canopy cover and gopher tortoise (Gopherus polyphemus) burrow abandonment. Chelonian Conserv. Biol. 2014, 13, 166–172. [Google Scholar] [CrossRef]
- Flaherty, S.; Lurz, P.W.W.; Patenaude, G. Use of LiDAR in the conservation management of the endangered red squirrel (Sciurus vulgaris L.). J. Appl. Remote Sens. 2014, 8. [Google Scholar] [CrossRef]
- Rundel, P.; Gibson, A.C. Ecological Communities and Processes in a Mojave Desert Ecosystem: Rock Valley, Nevada; Cambridge University Press: New York, NY, USA, 2005. [Google Scholar]
- Heidemann, H.K. LiDAR Base Specification. Available online: https://dx.doi.org/10.3133/tm11B4 (accessed on 1 May 2017).
- Schenk, T. Modeling and Analyzing Systematic Errors in Airborne Laser Scanners; Ohio State University: Columbus, OH, USA, 2001. [Google Scholar]
- Habib, A.; Bang, K.I.; Kersting, A.P.; Chow, J. Alternative methodologies for LiDAR system calibration. Remote Sens. 2010, 2, 874–907. [Google Scholar] [CrossRef]
- Wehr, A. LiDAR systems and calibration. In Topographic laser Ranging and Scanning; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Toth, C.K. Calibrating airborne LiDAR systems. In Proceedings of the ISPRS Commission II Symposium, Xi’an, China, 20–23 August 2002. [Google Scholar]
- Barabesi, L.; Fattorini, L. Random versus stratified location of transects or points in distance sampling: Theoretical results and practical considerations. Environ. Ecol. Stat. 2013, 20, 215–236. [Google Scholar] [CrossRef]
- Stevens, D.L.; Osen, A.R. Variance estimation for spatially balanced samples of environmental resources. Environmetrics 2003, 14, 593–610. [Google Scholar] [CrossRef]
- Elzinga, C.L.; Salzer, D.W.; Willoughby, J.W. Measuring and Monitoring Plant Populations; U.S. Bureau of Land Management: Denver, CO, USA, 1998.
- Greig-Smith, P. Quantitative Plant Ecology, 3 ed.; University of California Press: Los Angeles, CA, USA, 1983. [Google Scholar]
- Knight and Leavitt Associates. Vegetation Data for Desert Tortoise Occupancy Covariate Monitoring Project at the Boulder City Conservation Easement. Available online: http://www.clarkcountynv.gov/airquality/dcp/Documents/Library/symposium/2016/9-Vegetation%20Data%20for%20Desert%20Tortoise%20Occupancy%20Covariate%20Monitoring-2016.pdf (accessed on 1 May 2017).
- Hamerlynck, E.P.; McAuliffe, J.R.; McDonald, E.V.; Smith, S.D. Ecological responses of two Mojave Desert shrubs to soil horizon development and soil water dynamics. Ecology 2002, 83, 768–779. [Google Scholar] [CrossRef]
- Isenburg, M. LAStools—Efficient Tools for LiDAR Processing. Available online: http://lastools.org (accessed on 31 March 2017).
- Glenn, N.F.; Spaete, L.P.; Sankey, T.T.; Derryberry, D.R.; Hardegree, S.P.; Mitchell, J.J. Errors in LiDAR-derived shrub height and crown area on sloped terrain. J. Arid Environ. 2011, 75, 377–382. [Google Scholar] [CrossRef]
- Shi, X. ArcSIE Toolbox for Digital Soil Mapping, v 10.2.105; Dartmouth College: Hanover, NH, USA, 2013. [Google Scholar]
- Riley, S.J. A Terrain Ruggedness Index (TRI) that quantifies topographic heterogeneity Intermt. J. Sci. 1999, 5, 23–27. [Google Scholar]
- Zevenbergen, L.W.; Thorne, C.R. Quantitative analysis of land surface topography. Earth Surf. Process. Landf. 1987, 12, 47–56. [Google Scholar] [CrossRef]
- Shi, X.; Zhu, A.X.; Burt, J.; Choi, W.; Wang, R.X.; Pei, T.; Li, B.L.; Qin, C.Z. An experiment using a circular neighborhood to calculate slope gradient from a DEM. Photogramm. Eng. Remote Sens. 2007, 73, 143–154. [Google Scholar] [CrossRef]
- Streutker, D.R.; Glenn, N.F. LiDAR measurement of sagebrush steppe vegetation heights. Remote Sens. Environ. 2006, 102, 135–145. [Google Scholar] [CrossRef]
- Luscombe, D.J.; Anderson, K.; Gatis, N.; Wetherelt, A.; Grand-Clement, E.; Brazier, R.E. What does airborne LiDAR really measure in upland ecosystems? Ecohydrology 2015, 8, 584–594. [Google Scholar] [CrossRef]
- Sankey, J.B.; Munson, S.M.; Webb, R.H.; Wallace, C.S.A.; Duran, C.M. Remote sensing of Sonoran Desert vegetation structure and phenology with ground-based LiDAR. Remote Sens. 2015, 7, 342–359. [Google Scholar] [CrossRef]



© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Young, M.H.; Andrews, J.H.; Caldwell, T.G.; Saylam, K. Airborne LiDAR and Aerial Imagery to Assess Potential Burrow Locations for the Desert Tortoise (Gopherus agassizii). Remote Sens. 2017, 9, 458. https://doi.org/10.3390/rs9050458
Young MH, Andrews JH, Caldwell TG, Saylam K. Airborne LiDAR and Aerial Imagery to Assess Potential Burrow Locations for the Desert Tortoise (Gopherus agassizii). Remote Sensing. 2017; 9(5):458. https://doi.org/10.3390/rs9050458
Chicago/Turabian StyleYoung, Michael H., John H. Andrews, Todd G. Caldwell, and Kutalmis Saylam. 2017. "Airborne LiDAR and Aerial Imagery to Assess Potential Burrow Locations for the Desert Tortoise (Gopherus agassizii)" Remote Sensing 9, no. 5: 458. https://doi.org/10.3390/rs9050458
APA StyleYoung, M. H., Andrews, J. H., Caldwell, T. G., & Saylam, K. (2017). Airborne LiDAR and Aerial Imagery to Assess Potential Burrow Locations for the Desert Tortoise (Gopherus agassizii). Remote Sensing, 9(5), 458. https://doi.org/10.3390/rs9050458