
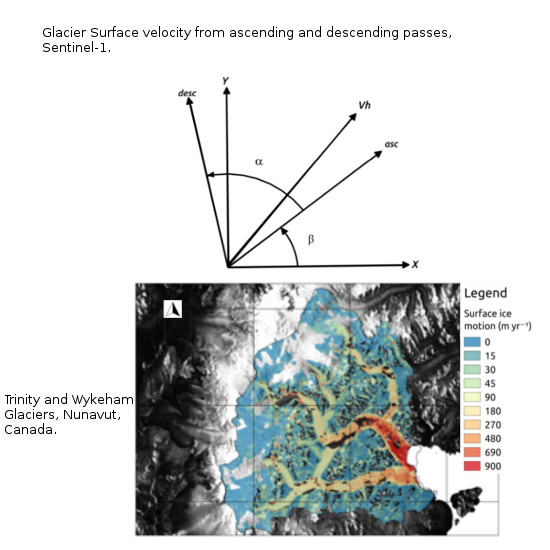
Glacier Surface Velocity Retrieval Using D-InSAR and Offset Tracking Techniques Applied to Ascending and Descending Passes of Sentinel-1 Data for Southern Ellesmere Ice Caps, Canadian Arctic

Abstract
:
1. Introduction
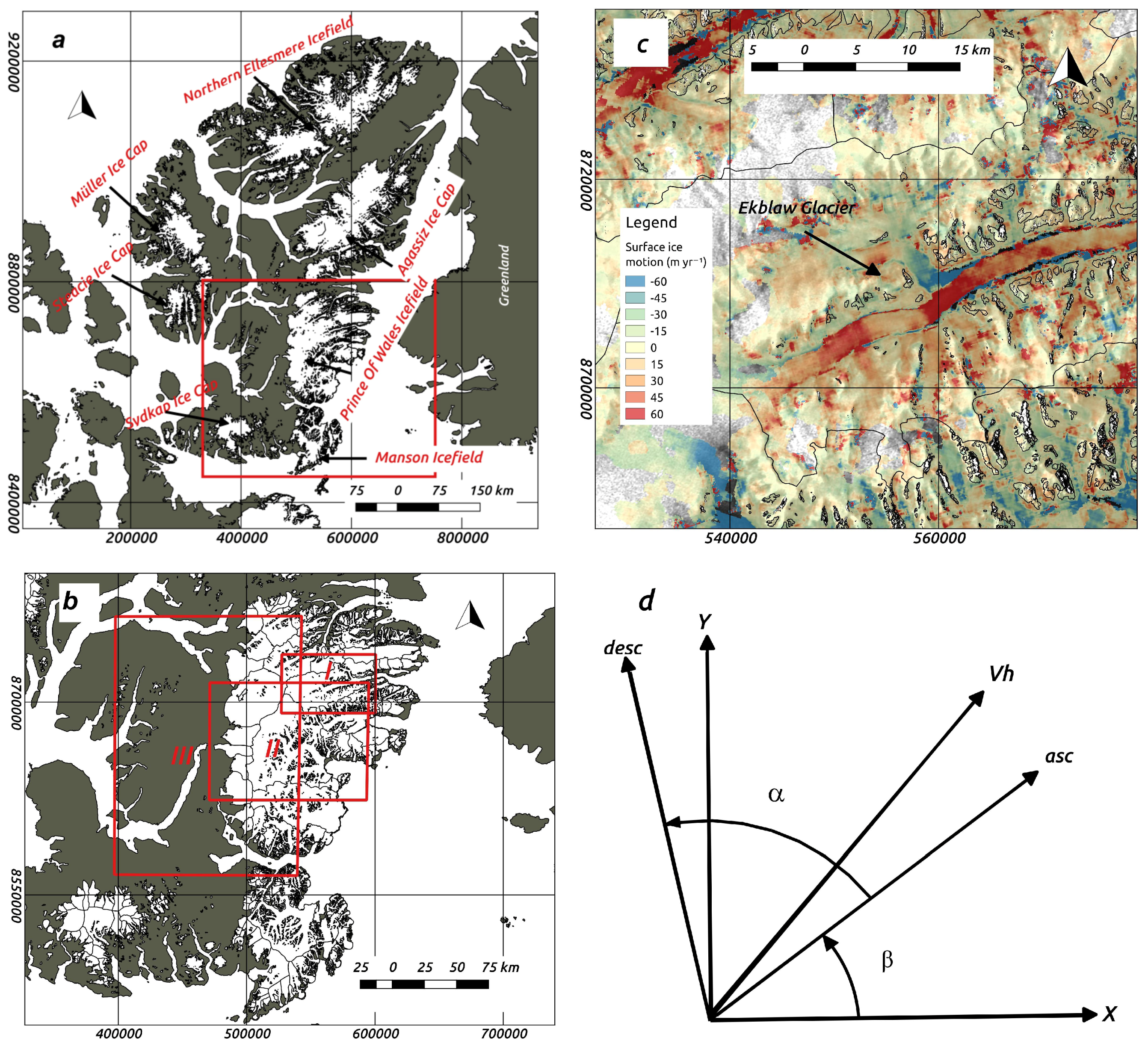
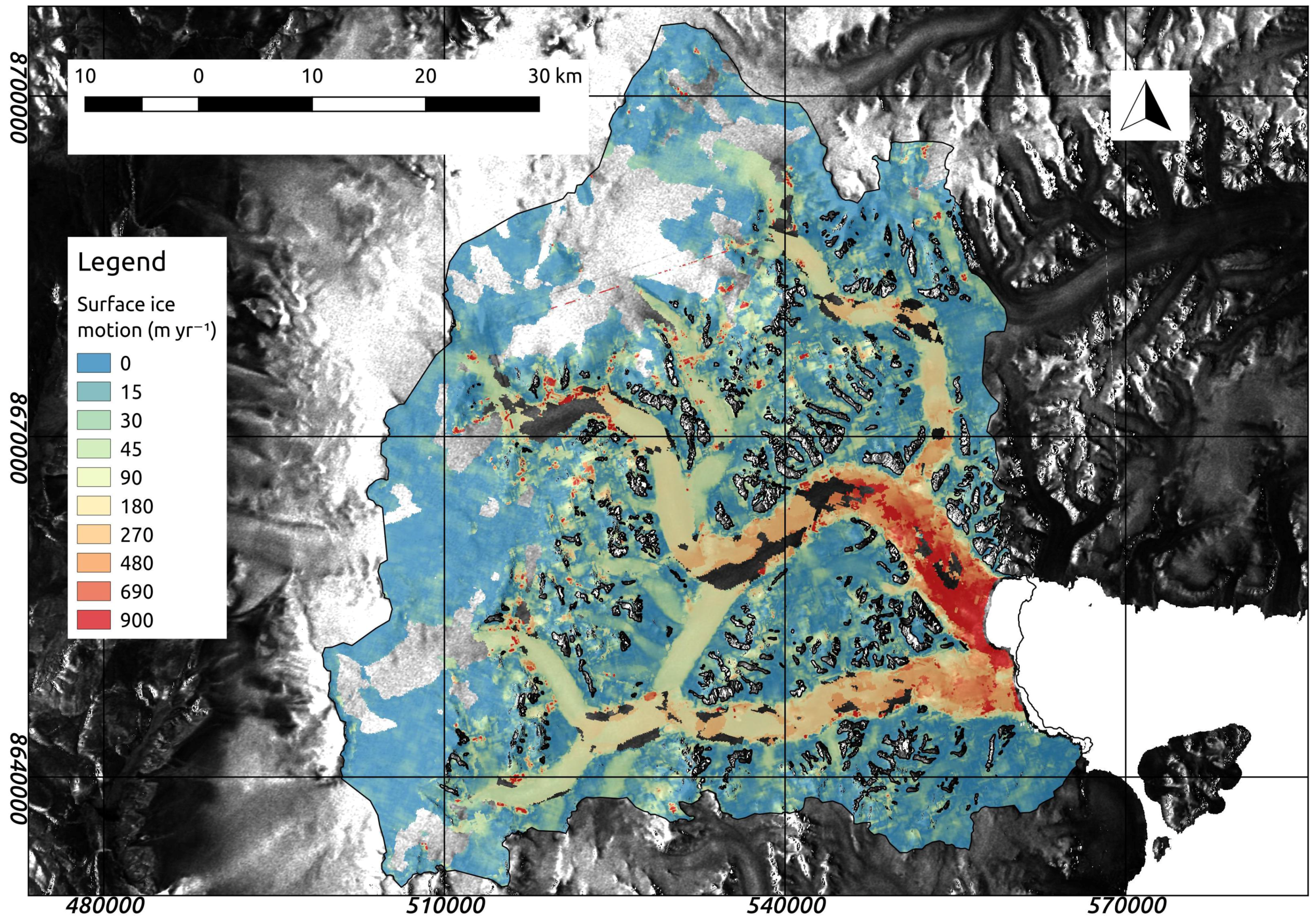
2. Study Area and Data Sources
3. Methods
3.1. GAMMA Remote Sensing Offset Tracking
3.2. GAMMA Remote Sensing D-InSAR
3.3. Application to Ascending and Descending Passes
3.3.1. Offset Tracking Case
3.3.2. D-InSAR Case
4. Results and Discussion
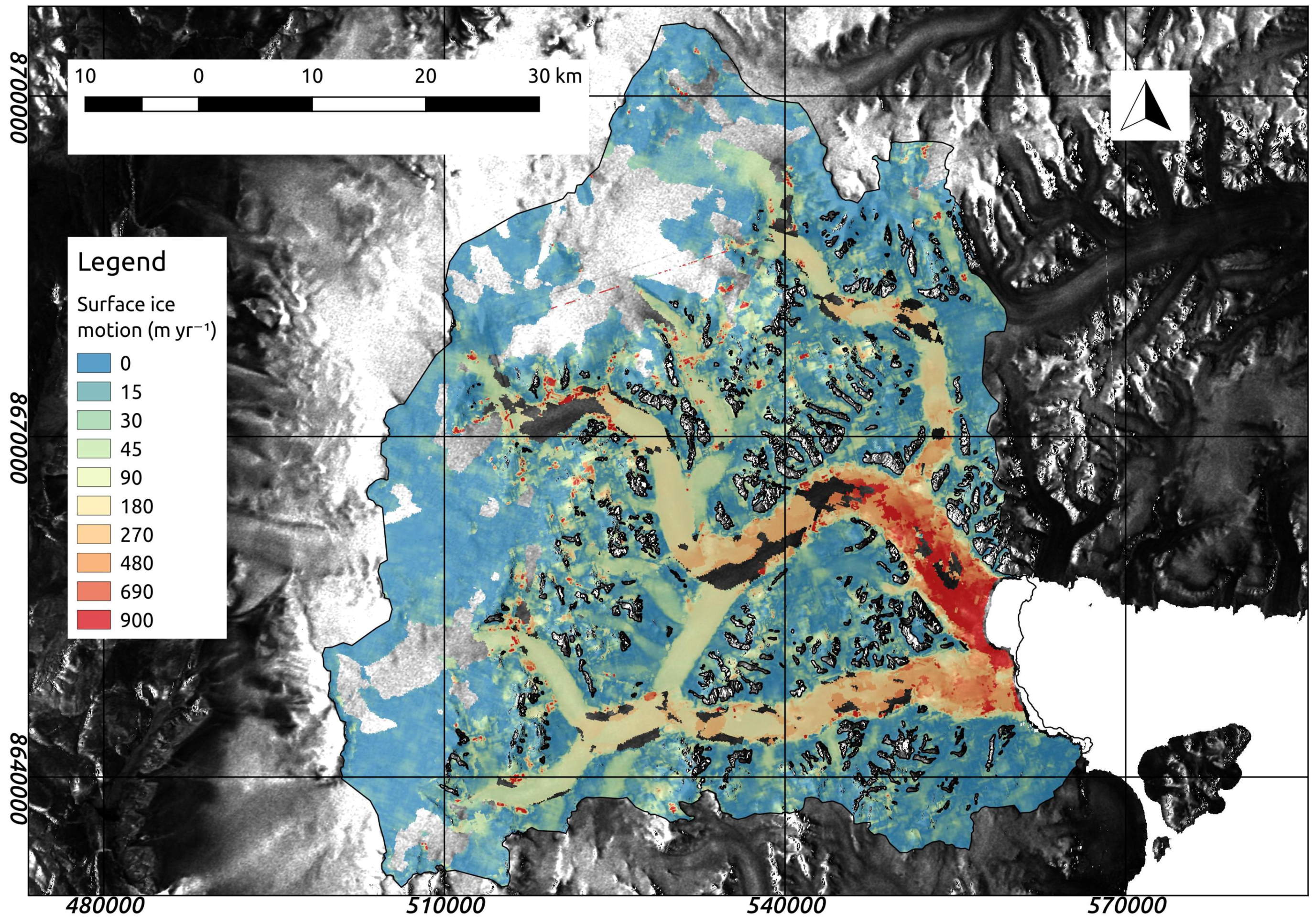
4.1. Offset Tracking Velocity Mapping of Southern Ellesmere’s Ice Caps
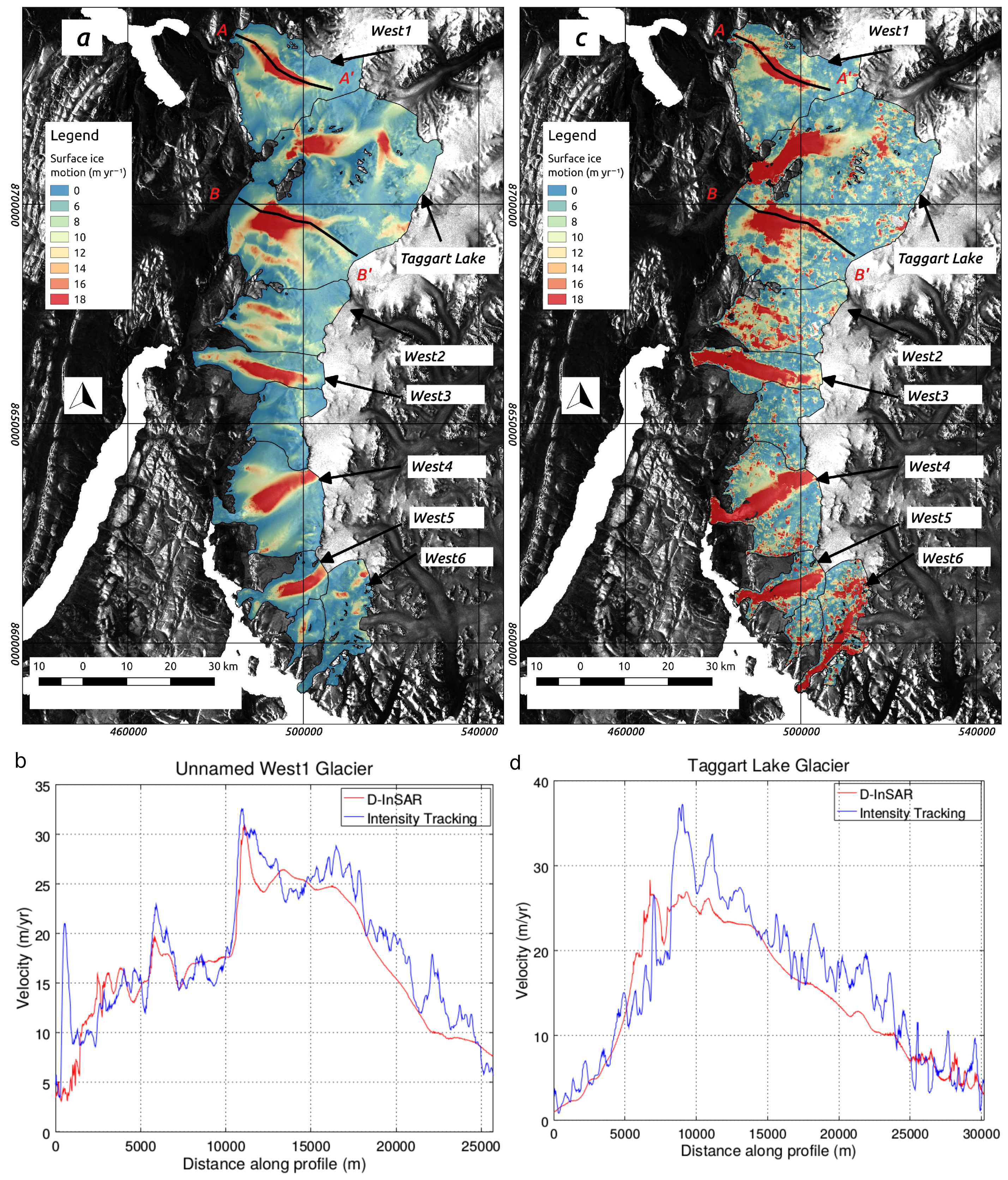
4.2. D-InSAR Velocity Mapping of Southern Ellesmere’s Ice Caps
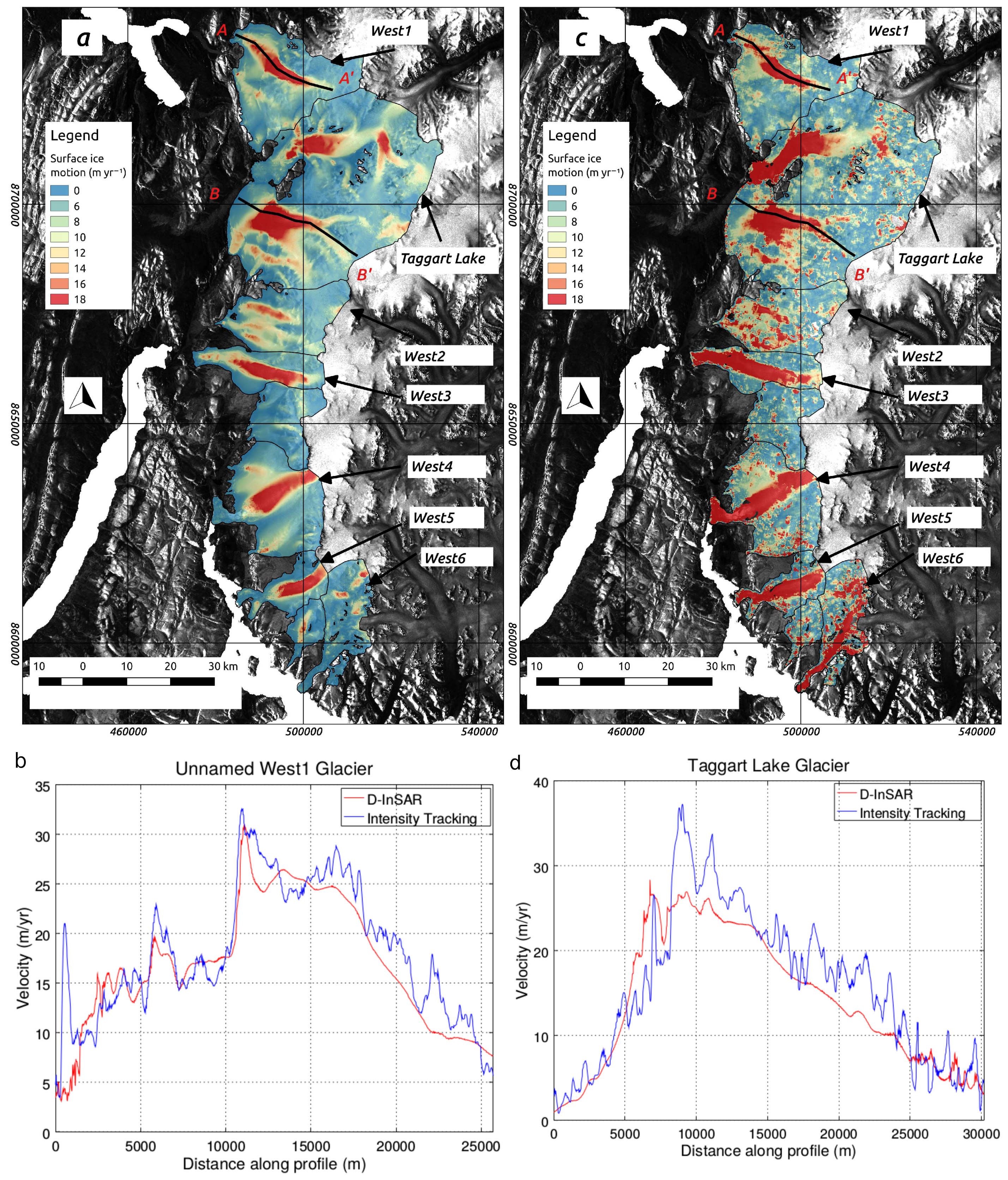
4.3. Comparison of Offset Tracking and D-InSAR Results
4.4. Comparison with Previous Studies
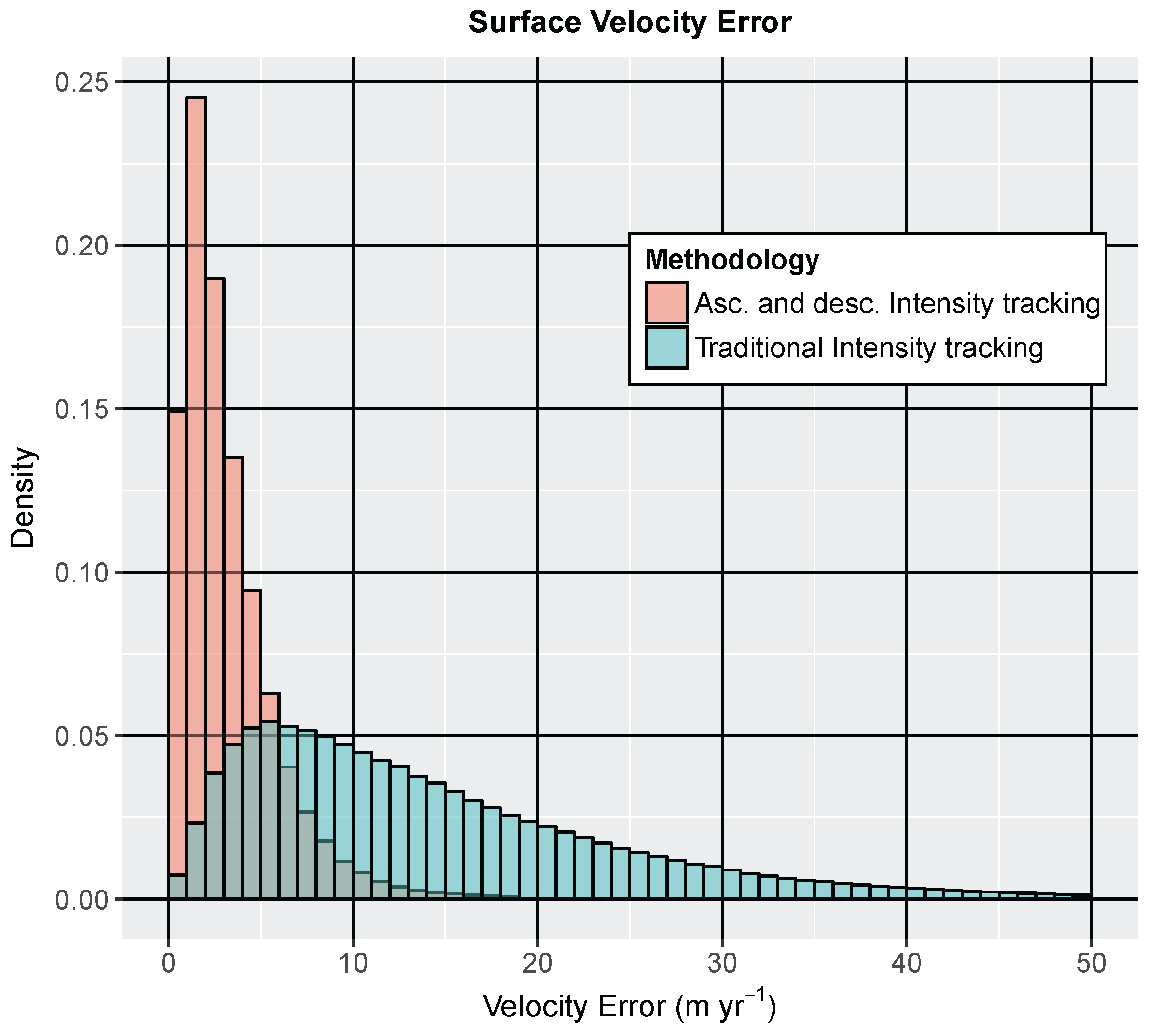
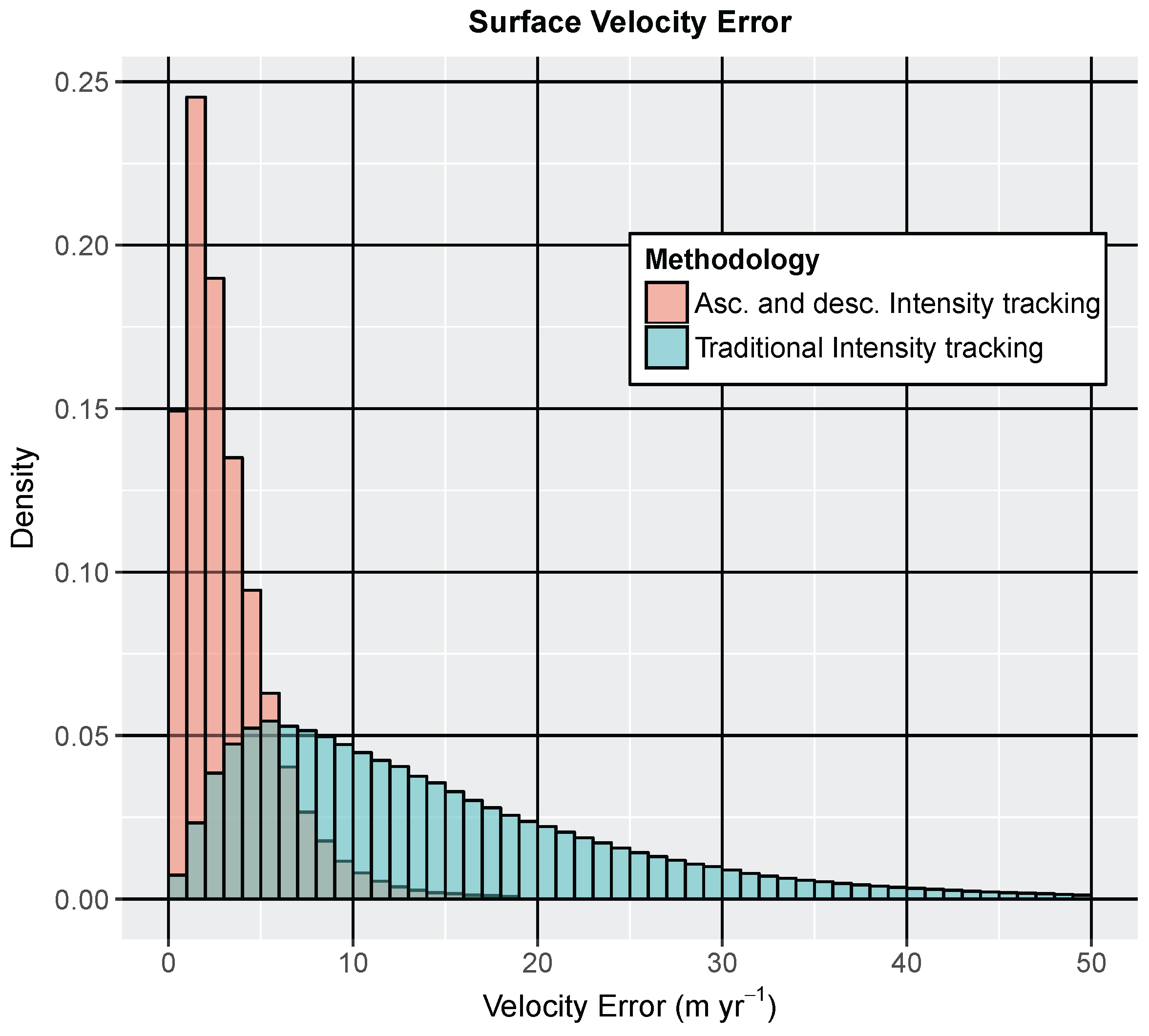
4.5. Error Estimates
4.5.1. Offset Tracking Case
4.5.2. Differential Interferometric Case
5. Conclusions
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CAA | Canadian Arctic Archipelago |
| DEM | Digital Elevation Model |
| D-InSAR | Differential Interferometric SAR |
| ERS | European Remote Sensing |
| ESA | European Space Agency |
| EW | Extra Wide-swath |
| GMES | Global Monitoring for Environment and Security |
| HH | Microwave polarisation, transmitted and received |
| IW | Interferometric Wide-swath |
| NRCan | Natural Resources Canada |
| POW | Prince Of Wales |
| RGI | Randolph Glacier Inventory |
| RMSE | Root Mean Square Error |
| SAR | Synthetic Aperture Radar |
| ScanSAR | Scanning SAR |
| SLC | Single Look Complex |
| SMB | Surface Mass Balance |
| TEC | Total Electron Content |
| TOPS | Terrain Observation by Progressive Scans |
| UTM | Universal Transverse Mercator |
| WGS84 | World Geodetic System 1984 |
References
- Cracknell, A.P.; Varotsos, C.A. New aspects of global climate-dynamics research and remote sensing. Int. J. Remote Sens. 2011, 32, 579–600. [Google Scholar] [CrossRef]
- Berger, M.; Moreno, J.; Johannessen, J.; Levelt, P.; Hanssen, R. ESA’s sentinel missions in support of earth system science. Remote Sens. Environ. 2012, 120, 84–90. [Google Scholar] [CrossRef]
- Malenovský, Z.; Rott, H.; Cihlar, J.; Schaepman, M.E.; García-Santos, G.; Fernandes, R.; Berger, M. Sentinels for science: Potential of Sentinel-1, -2, and -3 missions for scientific observations of ocean, cryosphere, and land. Remote Sens. Environ. 2012, 120, 91–101. [Google Scholar] [CrossRef]
- Potin, P.; Rosich, B.; Roeder, J.; Bargellini, P. Sentinel-1 mission operations concept. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Québec, QC, Canada, 13–18 July 2014; pp. 1465–1468. [Google Scholar]
- Aschbacher, J.; Milagro-Peréz, M.P. The European Earth monitoring (GMES) programme: Status and perspectives. Remote Sens. Environ. 2012, 120, 3–8. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Geudtner, D.; Torres, R.; Snoeij, P.; Davidson, M.; Rommen, B. Sentinel-1 system capabilities and applications. In Proceedings of the 2014 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Québec City, QC, Canada, 13–18 July 2014; pp. 1457–1460. [Google Scholar]
- Grandin, R. Interferometric processing of SLC Sentinel-1 TOPS data. In Proceedings of the FRINGE’15: Advances in the Science and Applications of SAR Interferometry and Sentinel-1 InSAR Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Scheiber, R.; Jager, M.; Prats-Iraola, P.; de Zan, F.; Geudtner, D. Speckle tracking and interferometric processing of TerraSAR-X TOPS data for mapping nonstationary scenarios. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 1709–1720. [Google Scholar] [CrossRef]
- Prats-Iraola, P.; Scheiber, R.; Marotti, L.; Wollstadt, S.; Reigher, A. TOPS interferometry with TerraSAR-X. IEEE Trans. Geosci. Remote 2012, 50, 3179–3188. [Google Scholar] [CrossRef]
- Marotti, L.; Prats-Iraola, P.; Scheiber, R.; Wollstadt, S.; Reigher, A. TOPS Differential SAR interferometry with TerraSAR-X. In Proceedings of the ‘Fringe 2011 Workshop’, Frascati, Italy, 19–23 September 2011. [Google Scholar]
- Joughin, I.; Kwok, R.; Fahnestock, M.A. Interferometric estimation of three-dimensional ice-flow using ascending and descending passes. IEEE Trans. Geosci. Remote Sens. 1998, 36, 25–37. [Google Scholar] [CrossRef]
- Mohr, J.J.; Reeh, N.; Madsen, S.N. Three-dimensional glacial flow and surface elevation measured with radar interferometry. Nature 1998, 391, 273–276. [Google Scholar]
- Kumar, V.; Venkataramana, G.; Høgda, K.A. Glacier surface velocity estimation using SAR interferometry technique applying ascending and descending passes in Himalayas. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 545–551. [Google Scholar] [CrossRef]
- Werner, C.; Wegmüller, U.; Strozzi, T.; Wiesmann, A. Precision estimation of local offsets between pairs of SAR SLCs and detected SAR images. In Proceedings of the IGARSS 2005: IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 29 July 2005; Volume 7, pp. 4803–4805. [Google Scholar]
- Fallourd, R.; Vernier, F.; Yan, Y.; Trouve, E.; Bolon, P. Alpine glacier 3D displacement derived from ascending and descending TerraSAR-X images on Mont-Blanc test site. In Proceedings of the 8th European Conference on Synthetic Aperture Radar (EUSAR), Aachen, Germany, 7–10 June 2010. [Google Scholar]
- Pritchard, H.; Murray, T.; Luckman, A.; Strozzi, T.; Barr, S. Glacier surge dynamics of Sortebræ, east Greenland, from synthetic aperture radar feature tracking. J. Geophys. Res. 2005, 110, F03005. [Google Scholar] [CrossRef]
- Strozzi, T.; Luckman, A.; Murray, T.; Wegmüller, U.; Werner, C. Glacier motion estimation using SAR offset-tracking procedures. IEEE Trans. Geosci. Remote Sens. 2002, 40, 11–2391. [Google Scholar] [CrossRef]
- Strozzi, T.; Kouraev, A.; Wiesmann, A.; Sharov, A.; Wegmüller, U.; Werner, C. Estimation of Arctic glacier motion with satellite L-band SAR data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2006), Denver, CO, USA, 31 July–4 August 2006. [Google Scholar]
- Dall, J; Kusk, A.; Nielsen, U.; Boncori, J.P.M. Ice velocity mapping using TOPS SAR data and offset tracking. In Proceedings of the FRINGE’15: Advances in the Science and Applications of SAR Interferometry and Sentinel-1 InSAR Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Nagler, T.; Rott, H.; Hetzenecker, M.; Wuite, J.; Potin, P. The Sentinel-1 Mission: New Opportunities for Ice Sheet Observations. Remote Sens. 2015, 7, 9371–9389. [Google Scholar] [CrossRef]
- Joughin, I. Ice-sheet velocity mapping: A combined interferometric and speckle-tracking approach. Ann. Glaciol. 2002, 34, 195–201. [Google Scholar] [CrossRef]
- Liu, H.X.; Zhao, Z.Y.; Jezek, K.C. Synergistic fusion of interferometric and speckle-tracking methods for deriving surface velocity from interferometric SAR data. IEEE Geosci. Remote Sens. Lett. 2007, 4, 102–106. [Google Scholar] [CrossRef]
- Gray, L.; Joughin, I.; Tulaczyk, S.; Splkes, V.B.; Bindschadler, R.; Jezek, K. Evidence for subglacial water transport in the West Antarctic Ice Sheet through three-dimensional satellite radar interferometry. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- Gudmundsson, S.; Gudmundsson, M.T.; Bjornsson, H.; Sigmundsson, F.; Rott, H.; Carstensen, J.M. Three-dimensional glacier surface motion maps at the Gjalp eruption site, Iceland, inferred from combining InSAR and other ice-displacement data. Ann. Glaciol. 2002, 34, 315–322. [Google Scholar] [CrossRef]
- Mouginot, J.; Scheuchl, B.; Rignot, E. Mapping of ice motion in Antarctica using synthetic-aperture radar data. Remote Sens. 2012, 4, 2753–2767. [Google Scholar] [CrossRef]
- Hu, J.; Li, Z.W.; Ding, X.L.; Zhu, J.J.; Zhang, L.; Sun, Q. Resolving three-dimensional surface displacements from InSAR measurements: A review. Earth-Sci. Rev. 2014, 133, 1–17. [Google Scholar] [CrossRef]
- Wegmüller, U.; Werner, C.; Strozzi, T.; Wiesmann, A. Ionospheric electron concentration effects on SAR and INSAR. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2006), Denver, CO, USA, 31 July–4 August 2006. [Google Scholar]
- Gray, A.L.; Mattar, K.E.; Sofko, G. Influence of Ionospheric Electron Density Fluctuations on Satellite Radar Interferometry. Geophys. Res. Lett. 2000, 27, 10–1451. [Google Scholar] [CrossRef]
- Sharp, M.; Burgess, D.O.; Cawkwell, F.; Copland, L.; Davis, J.A.; Dowdeswell, E.K.; Dowdeswell, J.A.; Gardner, A.S.; Mair, D.; Wang, L.; et al. Remote sensing of recent glacier changes in the Canadian Arctic. In Global Land Ice Measurements from Space; Kargel, J.S., Leonard, G.J., Bishop, M.P., Kääb, A., Raup, B.H., Eds.; Springer: Berlin/Heidelberg, Germany, 2014; Caption 9; pp. 205–228. [Google Scholar]
- Radić, V.; Hock, R. Regional and global volumes of glaciers derived from statistical upscaling of glacier inventory data. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- Gardner, A.S.; Sharp, M. Influence of the Arctic Circumpolar Vortex on the Mass Balance of Canadian High Arctic Glaciers. J. Clim. 2007, 20, 4586–4598. [Google Scholar] [CrossRef]
- Alt, T.B. Developing Synoptic Analogs for Extreme Mass Balance Conditions on Queen Elizabeth Island Ice Caps. J. Clim. Appl. Meteorol. 1987, 26, 1605–1623. [Google Scholar]
- Lenaerts, J.T.M.; van Angelen, J.H.; van den Broeke, M.R.; Gardner, A.S.; Wouters, B.; van Meijgaard, E. Irreversible mass loss of Canadian Arctic Archipelago glaciers. Geophys. Res. Lett. 2013, 40, 870–874. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F. A Global, Self-consistent, Hierarchical, High-resolution Shoreline Database. J. Geophys. Res. 1996, 101, 8741–8743. [Google Scholar] [CrossRef]
- Pfeffer, W.T.; Arendt, A.A.; Bliss, A.; Bolch, T.; Cogley, J.G.; Gardner, A.S.; Hagen, J.O.; Hock, R.; Kaser, G.; Kienholz, C.; et al. The Randolph Glacier Inventory: A globally complete inventory of glaciers. J. Glaciol. 2014, 60, 537–552. [Google Scholar] [CrossRef]
- Koerner, R.M. Mass balance of glaciers in the Queen Elizabeth Islands, Nunavut, Canada. Ann. Glaciol. 2005, 42, 417–423. [Google Scholar] [CrossRef]
- Gardner, A.S.; Moholdt, G.; Wouters, B.; Wolken, G.J.; Burgess, D.O.; Sharp, M.J.; Cogley, J.G.; Braun, C.; Labine, C. Sharply increased mass loss from glaciers and ice caps in the Canadian Arctic Archipelago. Nature 2011, 473, 357–360. [Google Scholar] [CrossRef] [PubMed]
- Van Wychen, W.; Burgess, D.O.; Gray, L.; Copland, L.; Sharp, M.; Dowdeswell, J.A.; Benham, T.J. Glacier velocities and dynamic ice discharge from the Queen Elizabeth Islands, Nunavut, Canada. Geophys. Res. Lett. 2014, 41, 484–490. [Google Scholar] [CrossRef]
- Millan, R.; Mouginot, J.; Rignot, E. Mass budget of the glaciers and ice caps of the Queen Elizabeth Islands, Canada, from 1991 to 2015. Environ. Res. Lett. 2017, 12, 024016. [Google Scholar] [CrossRef]
- Van Wychen, W.; Davis, J.; Burgess, D.O.; Copland, L.; Gray, L.; Sharp, M.; Mortimer, C. Characterizing interannual variability of glacier dynamics and dynamic discharge (1999–2015) for the ice masses of Ellesmere and Axel Heiberg Islands, Nunavut, Canada. J. Geophys. Res. Earth Surf. 2016, 121, 39–63. [Google Scholar] [CrossRef]
- Copland, L.; Sharp, M.J.; Dowdeswell, J.A. The distribution and flow characteristics of surge-type glaciers in the Canadian High Arctic. Ann. Glaciol. 2003, 36, 73–81. [Google Scholar] [CrossRef]
- Williamson, S.; Sharp, M.; Dowdeswell, J.; Benham, T. Iceberg calving rates from northern Ellesmere Island ice caps, Canadian Arctic, 1999–2003. J. Glaciol. 2008, 54, 391–400. [Google Scholar] [CrossRef]
- Short, N.H.; Gray, A.L. Glacier dynamics in the Canadian High Arctic from RADARSAT-1 speckle tracking. Can. J. Remote Sens. 2005, 31, 225–339. [Google Scholar] [CrossRef]
- Gardner, A.; Moholdt, G.; Arendt, A.; Wouters, B. Accelerated contributions of Canada’s Baffin and Bylot Island glaciers to sea level rise over the past half century. Cryosphere 2012, 6, 1103–1125. [Google Scholar] [CrossRef]
- Holzner, J.; Bamler, R. Burst-mode and ScanSAR interferometry. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1917–1934. [Google Scholar] [CrossRef]
- De Zan, F.; Guarnieri, A.M. TOPSAR: Terrain observation by progressive scans. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2352–2360. [Google Scholar] [CrossRef]
- Natural Resources Canada (NRCan). Canadian Digital Elevation Model Product Specifications, 1.1 ed.; Government of Canada: Sherbrooke, QC, Canada, 2016.
- Wegmüller, U.; Werner, C.; Strozzi, T.; Wiesmann, A.; Othmar, F.; Santoro, M. Sentinel-1 support in the GAMMA software. In Proceedings of the FRINGE’15: Advances in the Science and Applications of SAR Interferometry and Sentinel-1 InSAR Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Schellenberger, T.; van Wychen, W.; Copland, L.; Kääb, A.; Gray, L. An Inter-Comparison of Techniques for Determining Velocitities of Maritime Arctic Glaciers, Svalbard, Using Radarsat-2 Wide Fine Mode Data. Remote Sens. 2016, 8, 785. [Google Scholar] [CrossRef]
- Guarnieri, A.M.; Mancon, S.; Tebaldini, S. Sentinel-1 precise orbit calibration and validation. Proceedings of FRINGE’15: Advances in the Science and Applications of SAR Interferometry and Sentinel-1 InSAR Workshop, Frascati, Italy, 23–27 March 2015. [Google Scholar]
- Xu, B.; Li, Z.; Feng, G.; Zhang, Z.; Wang, Q.; Hu, J.; Chen, X. Continent-Wide 2-D Co-Seismic Deformation of the 2015 Mw 8.3 Illapel, Chile Earthquake Derived from Sentinel-1A Data: Correction of Azimuth Co-Registration Error. Remote Sens. 2016, 8, 376. [Google Scholar] [CrossRef]
- Rignot, E.; Echelmeyer, K.; Krabill, W. Penetration depth of interferometric synthetic-aperture radar signals in snow and ice. Geophys. Res. Lett. 2001, 28, 3501–3504. [Google Scholar] [CrossRef]
- Rosen, P.A.; Hensley, S.; Joughin, I.R.; Li, F.K.; Madsen, S.N.; Rodriguez, E.; Goldstein, R.M. Synthetic Aperture Radar Interferometry. Proc. IEEE 2000, 88, 333–382. [Google Scholar] [CrossRef]
- Luckman, A.; Quency, D.; Bevan, S. The potential of satellite radar interferometry and feature tracking for monitoring flow rates of Himalayan glaciers. Remote Sens. Environ. 2007, 111, 172–181. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Beam Mode | Incidence Angle (Degrees) | Resolution (m) | Swath Width (km) |
|---|---|---|---|
| Stripmap | 20–45 | 5 × 5 m | 80 km |
| Interferometric Wide swath (IW) | 29–46 | 5 × 20 m | 250 km |
| Extra Wide swath (EW) | 19–57 | 20 × 40 m | 400 km |
| Wave | 22–35/35–38 | 5 × 5 m | 20 × 20 km |
| Acquisition Date | Beam Mode and Number | Orbit Number | Slice Number | Pass Direction | Methodology |
|---|---|---|---|---|---|
| 10 February 2016 | IW1 | 9890 | 5 | Ascending | D-InSAR |
| 10 February 2016 | IW1 | 9890 | 6 | Ascending | D-InSAR |
| 10 February 2016 | IW1 | 9890 | 7 | Ascending | D-InSAR |
| 17 February 2016 | IW1 | 9986 | 3 | Descending | D-InSAR |
| 17 February 2016 | IW1 | 9986 | 4 | Descending | D-InSAR |
| 22 February 2016 | IW1 | 10,065 | 5 | Ascending | Both |
| 22 February 2016 | IW1 | 10,065 | 6 | Ascending | Both |
| 22 February 2016 | IW1 | 10,065 | 7 | Ascending | Both |
| 29 February 2016 | IW1 | 10,161 | 3 | Descending | Both |
| 29 February 2016 | IW1 | 10,161 | 4 | Descending | Both |
| 5 March 2016 | IW1 | 10,240 | 6 | Ascending | Intensity Tracking |
| 5 March 2016 | IW1 | 10,240 | 7 | Ascending | Intensity Tracking |
| 12 March 2016 | IW1 | 10,336 | 3 | Descending | Intensity Tracking |
| 12 March 2016 | IW1 | 10,336 | 4 | Descending | Intensity Tracking |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sánchez-Gámez, P.; Navarro, F.J. Glacier Surface Velocity Retrieval Using D-InSAR and Offset Tracking Techniques Applied to Ascending and Descending Passes of Sentinel-1 Data for Southern Ellesmere Ice Caps, Canadian Arctic. Remote Sens. 2017, 9, 442. https://doi.org/10.3390/rs9050442
Sánchez-Gámez P, Navarro FJ. Glacier Surface Velocity Retrieval Using D-InSAR and Offset Tracking Techniques Applied to Ascending and Descending Passes of Sentinel-1 Data for Southern Ellesmere Ice Caps, Canadian Arctic. Remote Sensing. 2017; 9(5):442. https://doi.org/10.3390/rs9050442
Chicago/Turabian StyleSánchez-Gámez, Pablo, and Francisco J. Navarro. 2017. "Glacier Surface Velocity Retrieval Using D-InSAR and Offset Tracking Techniques Applied to Ascending and Descending Passes of Sentinel-1 Data for Southern Ellesmere Ice Caps, Canadian Arctic" Remote Sensing 9, no. 5: 442. https://doi.org/10.3390/rs9050442
APA StyleSánchez-Gámez, P., & Navarro, F. J. (2017). Glacier Surface Velocity Retrieval Using D-InSAR and Offset Tracking Techniques Applied to Ascending and Descending Passes of Sentinel-1 Data for Southern Ellesmere Ice Caps, Canadian Arctic. Remote Sensing, 9(5), 442. https://doi.org/10.3390/rs9050442