1. Introduction
The advent of new satellite observations promises to transform cloud-climate studies [
1], especially in the polar regions [
2]. Satellite observations are currently exploited to improve cloud parameterization in climate models [
3], to measure cloud occurrence and persistence [
4], and to study cloud-surface interactions [
5]. An important reason for improving satellite cloud detection methods is that many remote sensing applications require clear skies in order to work accurately (e.g., sea surface temperature retrievals, ocean colour retrievals, surface albedo retrievals, snow and sea ice mapping). In addition, the magnitude of Arctic warming depends on cloud climatology greatly, as Arctic clouds exert a strong influence on the underlying surface and the Arctic climate in general [
6]. Even the presence of thin cirrus clouds, if undetected, can impact radiative transfer calculations significantly. Cirrus clouds are crucially important to the global radiative process and the thermal balance of the Earth, allowing solar heating while reducing infrared radiation cooling to space. The radiation balance in the polar regions is yet to be understood due to the lack of accurate cloud climatology [
7,
8,
9]. This is mostly because of the difficulty in detecting clouds by passive satellite sensors over snow and ice surfaces, where it is difficult to distinguish between the reflectance and temperature of clouds and those of the underlying surface [
2,
10]. A further difficulty in polar regions is the false identification of clouds due to polar atmospheric temperature inversions, which causes clouds to be even warmer than the underlying snow or ice surface. This paper focuses on the Arctic region, which is still poorly covered by conventional meteorological sounding, due to the hostile environment. The high spectral resolution of advanced infrared sensors can significantly improve temperature and moisture soundings if compared with the other operational retrievals. Infrared observations, however, are frequently affected by the presence of clouds in the field of view (FOV). Thus, observations must be processed for operational data assimilation and inversion of geophysical parameters by screening the cloud-contaminated soundings. Polar-orbiting satellites provide frequent overpasses on the Arctic area with sufficient spatial resolution; nevertheless, cloud detection and parameter retrieval are still very difficult at high latitudes. Most of the Arctic surface is covered with snow and ice, which reduces the visible contrast between clouds and surface. In addition, during the winter there is little solar contribution, therefore techniques based on reflectance in the visible and near infrared (e.g., 1.6 μm channel) are not applicable. Moreover, Arctic clouds are often low and thin and composed of mixtures of ice and water [
7]. Over most surface types, visible/infrared (VIS/IR) threshold techniques are generally sufficient to detect clouds since they are both brighter and colder than the surface. For example, a FOV is identified as cloudy when its visible reflectance is 3% higher than the reflectance of the surrounding FOVs and its brightness temperature (BT) is 3 °C lower than the BT of the surrounding FOVs [
11]. However, threshold methods experience difficulties in the Arctic region stemming from low-to-no contrast between clouds and underlying snow–sea ice surface in the visible reflectances and the IR brightness temperatures [
12,
13,
14,
15].
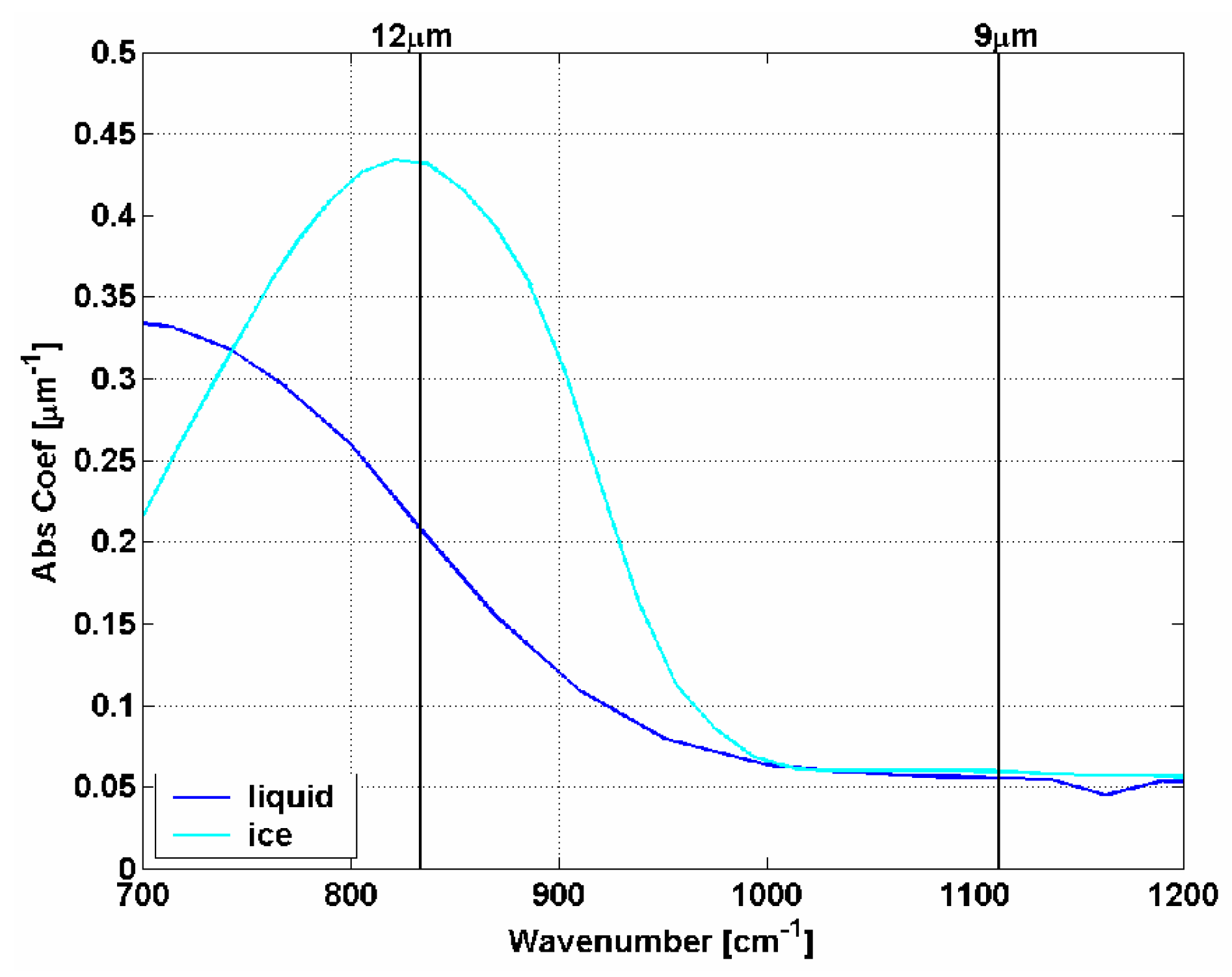
As such, uncertainties related to surface emissivity play an important role, since spectral emissivity for ice/snow surfaces may differ significantly depending upon microphysical properties. Furthermore, in particular cases the spectral emissivity of ice/snow surfaces may resemble the spectral signatures of clouds when observed by satellite and could potentially confuse detection techniques relying on thresholds. This in particular affects the infrared (IR) window tests usually exploited in cloud detection schemes over the Arctic region [
16,
17,
18]. Indeed, global validation of satellite cloud detection demonstrated the poorest performances over the polar regions during winter [
15,
19]. Therefore, much effort has been spent lately in improving cloud detection in the Arctic [
20,
21]. It follows that the vast majority of improvements over earlier cloud mask algorithm concern nighttime scenes, including polar night [
22,
23]. Nowadays, current operational cloud detection algorithms exploit more sophisticated procedures for detecting polar night-time clouds, including dynamic thresholds, ancillary data, and snow and ice identification [
24,
25,
26]. Recently, the availability of ultrasensitive day/night band channels in the visible/near-infrared range [
27], capable of measuring extremely low light such as reflected moonlight, stimulated the development of new nighttime lunar cloud properties algorithms [
28].
In this study, we analyse the spectrally-resolved radiance over an Arctic area to detect cloud contamination in the sensor FOV. Over the last few years meteorological satellites have carried infrared sensors with very high spectral resolutions. The spectral radiances of these new sensors contain the fingerprint of the underlying emitting surface, which may be used both to estimate the emissivity and identify the presence of clouds over peculiar surfaces, e.g., a desert [
29].
Section 2 describes the instruments and data description. The effect of sea/ice/snow emissivity spectra on simulated radiances in the IR wavenumber range often used for cloud detection (750–1000 cm
−1) is studied in
Section 3.
Section 4 reports the impact of surface emissivity uncertainties on the performances of polar night-time cloud detection techniques based on hyperspectral observations and a possible improvement to polar cloud detection methods. Finally, a validation of the described method is reported in
Section 5, using the combined CPR and CALIOP products (2B-GEOPROF-LIDAR) distributed by the CloudSat data processing centre (
http://cloudsat.atmos.colostate.edu/).
2. Instruments and Data Description
The Infrared Atmospheric Sounding Interferometer (IASI) consists of a Fourier Transform Spectrometer based on a Michelson Interferometer [
30]. The instrument provides spectra of high radiometric quality at 0.5 cm
−1 resolution, from 645 to 2760 cm
−1. Data samples are taken at intervals of 25 km along and across the track, each sample having a maximum diameter of about 12 km. IASI is a key payload element of the Meteorological Operational satellite (MetOp) series of European meteorological polar-orbit satellites [
31]. IASI has been designed for operational meteorological soundings with a very high level of accuracy being devoted to improved medium range weather forecast. The temperature is measured under clear sky with a vertical resolution of 1 km in the lower troposphere, a horizontal resolution of 25 km, and an accuracy of 1 K. The humidity is measured under clear sky with a vertical resolution of 1–2 km in the lower troposphere, a horizontal resolution of 25 km, with an accuracy of 10%. It is also designed for atmospheric chemistry observations, aimed at estimating and monitoring trace gases like ozone, methane, or carbon monoxide on a global scale [
30].
The Advanced Very High Resolution Radiometer (AVHRR/3) is one of the instruments provided by the U.S. National Oceanic and Atmospheric Administration (NOAA) to fly on MetOp-A. The AVHRR/3 scans the Earth surface in six spectral bands in the range of 0.58–12.5 µm. The instrument has an instantaneous FOV of 1.3 milliradians providing a nominal spatial resolution of 1.1 km at nadir. (
http://noaasis.noaa.gov/NOAASIS/ml/avhrr.html).
The Moderate–Resolution Imaging Spectroradiometer (MODIS) is an instrument of the Earth Observing System (EOS) and it measures radiances at 36 wavelengths (from 0.4 to 14.5 μm) at 250 m spatial resolution in two visible bands, 500 m resolution in five visible bands, and 1000 m resolution in the infrared bands [
22,
32].
CloudSat is an experimental satellite that uses radar to observe clouds and precipitation from space. The Cloud Profiling Radar (CPR), the main instrument on CloudSat, is a 94 GHz radar providing vertically-resolved information on cloud location, cloud ice and liquid water content, precipitation, cloud classification, radiative fluxes, and heating rates [
33]. The vertical resolution is 480 m with 240 m sampling, and the horizontal resolution is approximately 1.4 km (cross-track) × 2.5 km (along-track) with sampling roughly every 1 km. Range bins with detectable hydrometeors are reported in the 2B-GEOPROF product [
34]. A cloudy range bin is associated with a confidence mask value that ranges from 0–40. Values ≥30 are confidently associated with clouds although values as low as six suggest clouds approximately 50% of the time [
35].
The Cloud-Aerosol Lidar and Infrared Pathfinder Satellite Observation (CALIPSO) payload consists of three nadir-viewing instruments: the Cloud-Aerosol Lidar with Orthogonal Polarization (CALIOP), the imaging infrared radiometer (IIR), and the wide field camera (WFC) [
36]. This instrument synergy enables the retrieval of a wide range of aerosol and cloud products including: vertically-resolved aerosol and cloud layers, extinction, optical depth, aerosol and cloud type, cloud water phase, cirrus emissivity, and particle size and shape [
36,
37]. The horizontal resolution is 70 m with an instantaneous field of view (IFOV) sampled at 333 m intervals along the track, and the vertical resolution is 30 m.
A combined radar-lidar product (2B-GEOPROF-LIDAR) is available [
35]. The 2B-GEOPROF-LIDAR algorithm is designed to extract maximum information from the combined radar and lidar sensors in order to provide the best description of the occurrence of hydrometeor layers in the vertical column. The CPR radar and CALIPSO lidar provide complementary information regarding the occurrence of hydrometeor layers in the vertical column. The radar penetrates optically thick layers that attenuate the lidar signal, and it observes layers of cloud-free precipitation that may not be observed by the lidar. The lidar senses tenuous hydrometeor layers that are below the detection threshold of the radar, e.g., the top of optically thin ice cloud layers that the radar would miss, and with higher spatial resolution than the radar. Note that CloudSat and CALIPSO are active instruments and consequently do not suffer from the same passive instrument retrieval challenges over bright and cold surfaces [
3]. Since the two instruments have different features such as vertical resolution, spatial resolution, and spatial frequency, the spatial domain of the output products of this algorithm is defined in terms of the spatial grid of the CPR. The GEOPROF-LIDAR swath data include the cloud fraction, the number of hydrometeor layers, the height of layer base, the height of layer top, and the contribution flag for each layer base and top.
4. Arctic Cloud Detection
In this study, we analyse the IR window tests usually exploited in cloud detection schemes [
16,
17] over the Arctic region. These tests, listed in
Table 2, have been adapted to work with IASI data. In order to understand the performance of the window IR threshold tests listed in
Table 2, we applied them to the set of 305 simulated clear-sky spectra described in
Section 3. Results are reported in
Table 3.
Table 3 shows that the tests in
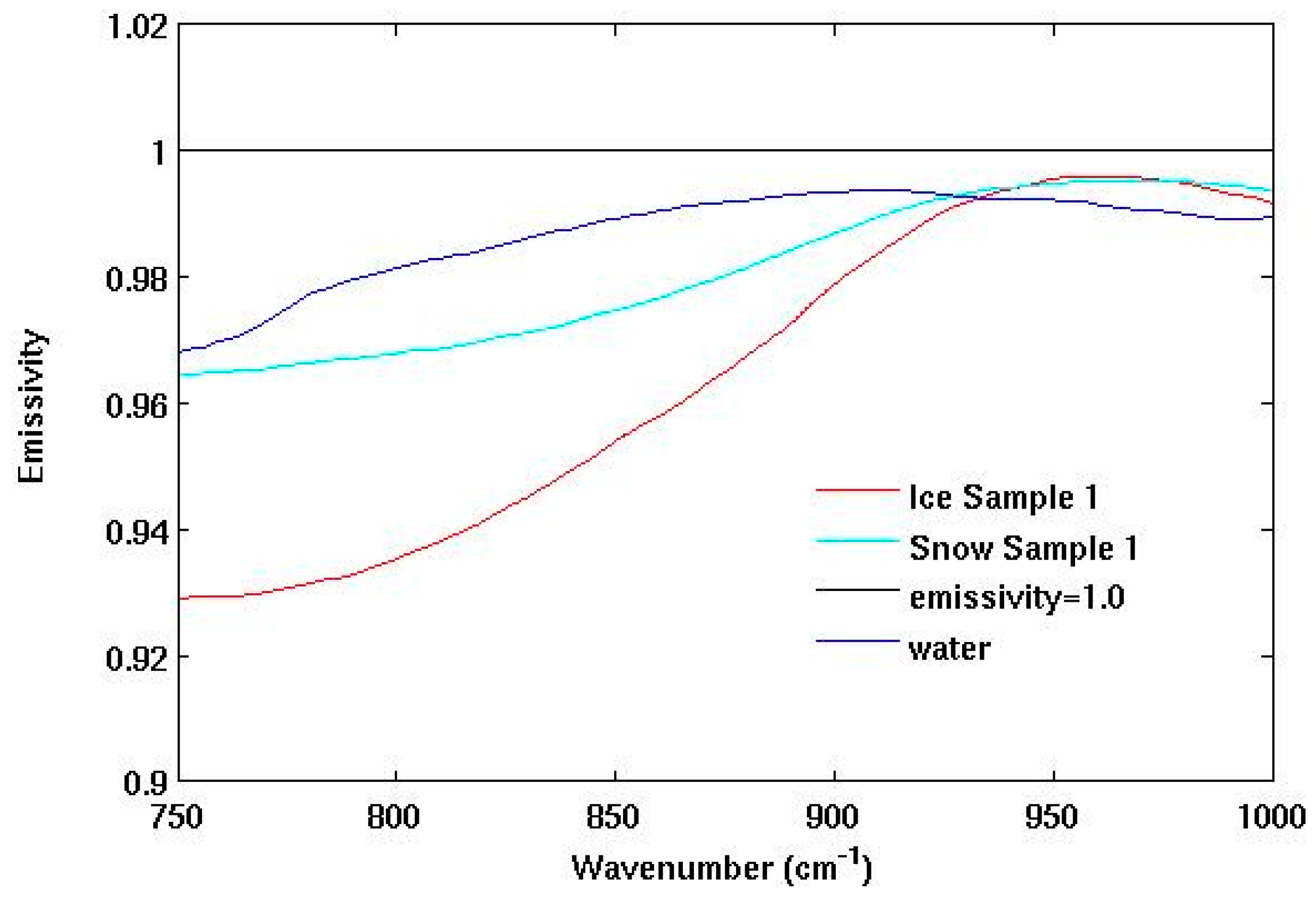
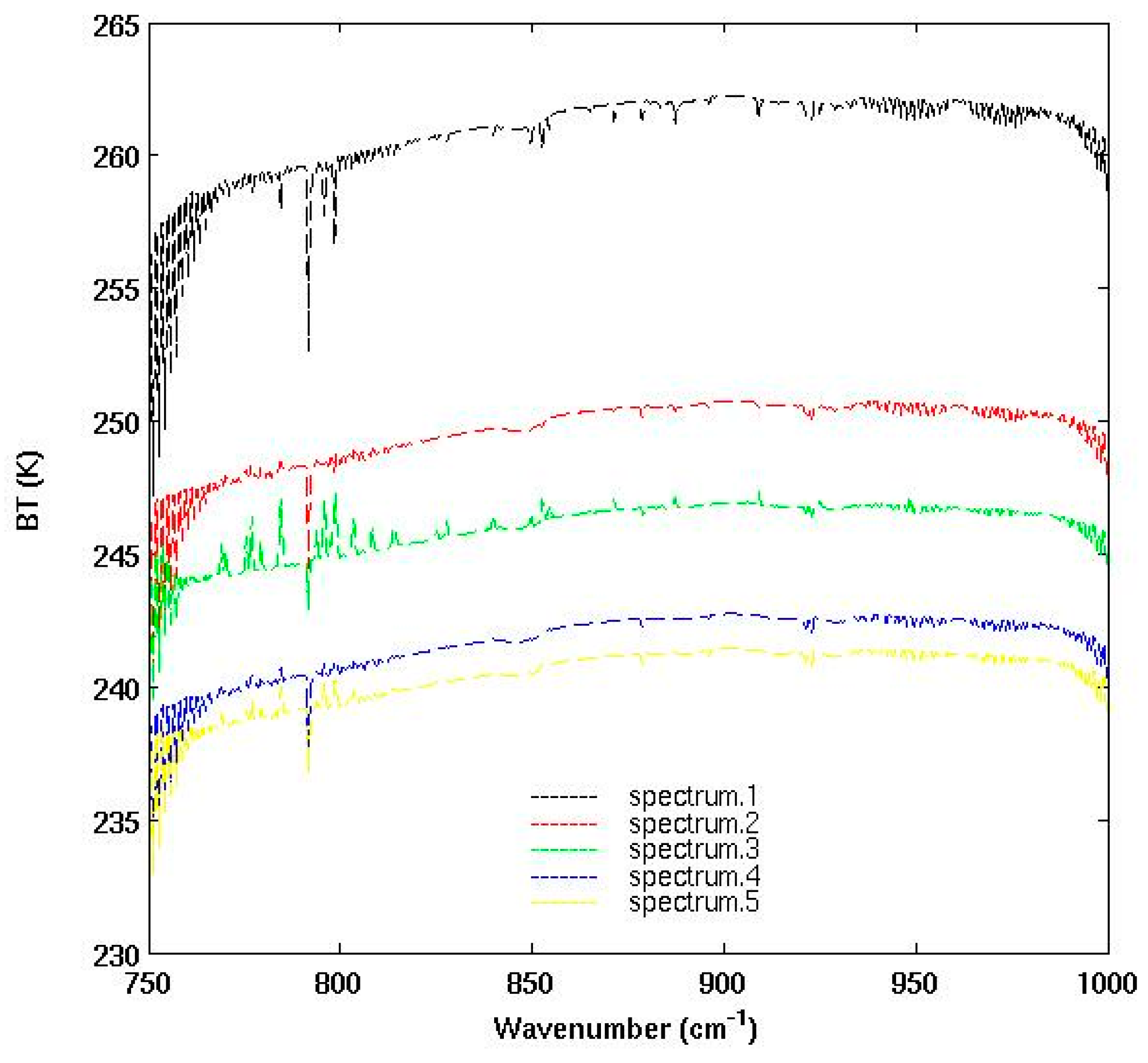
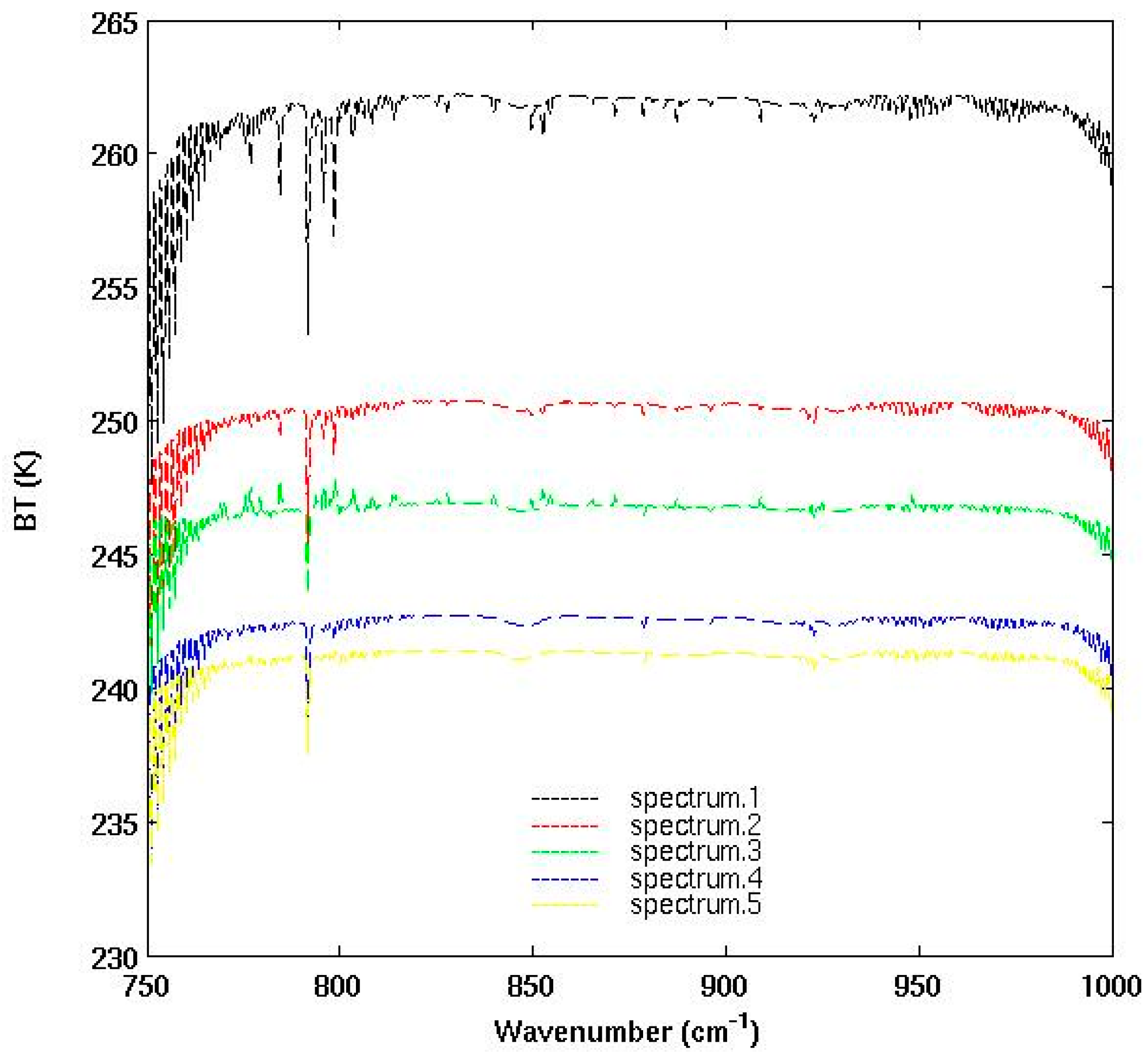
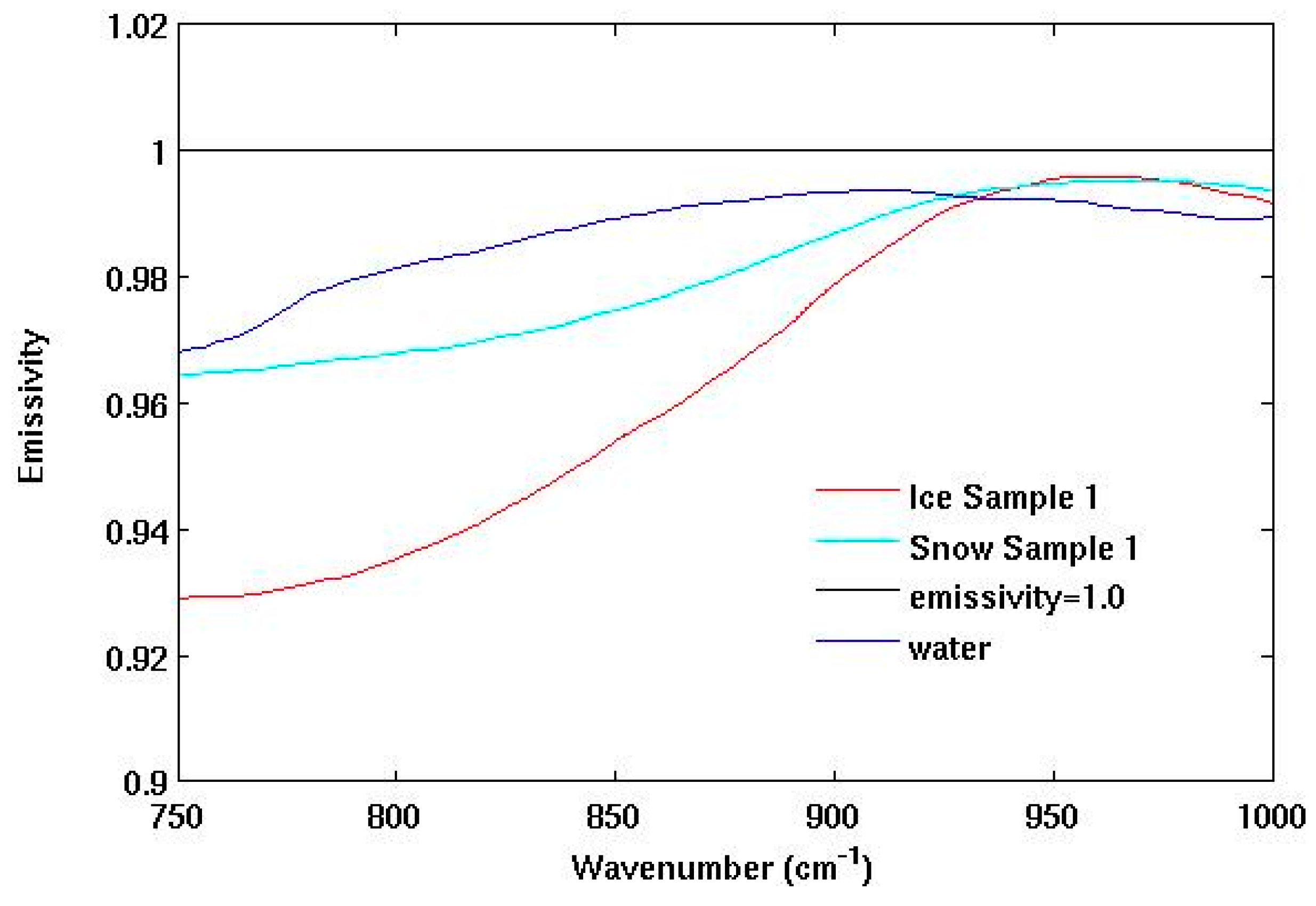
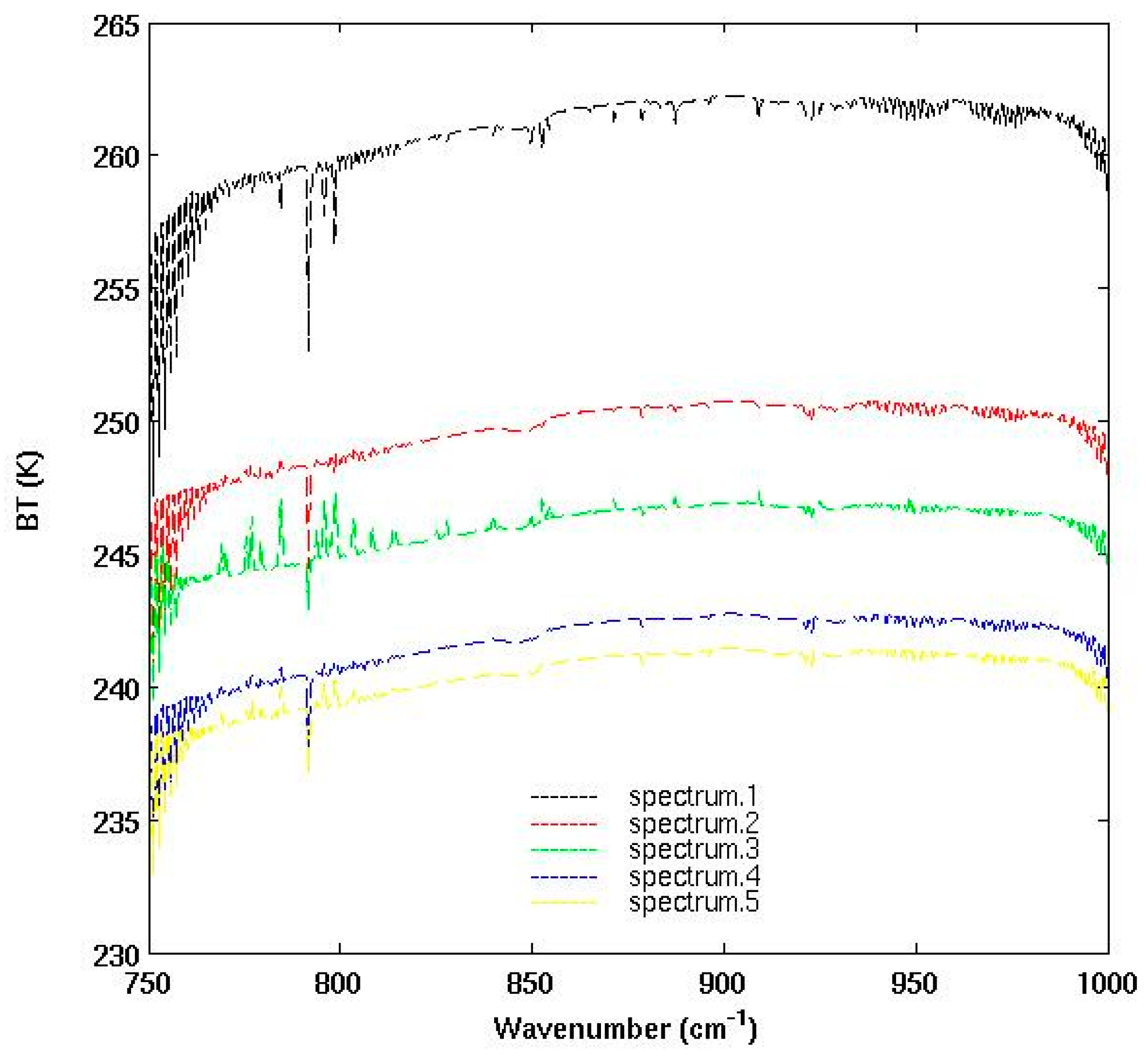
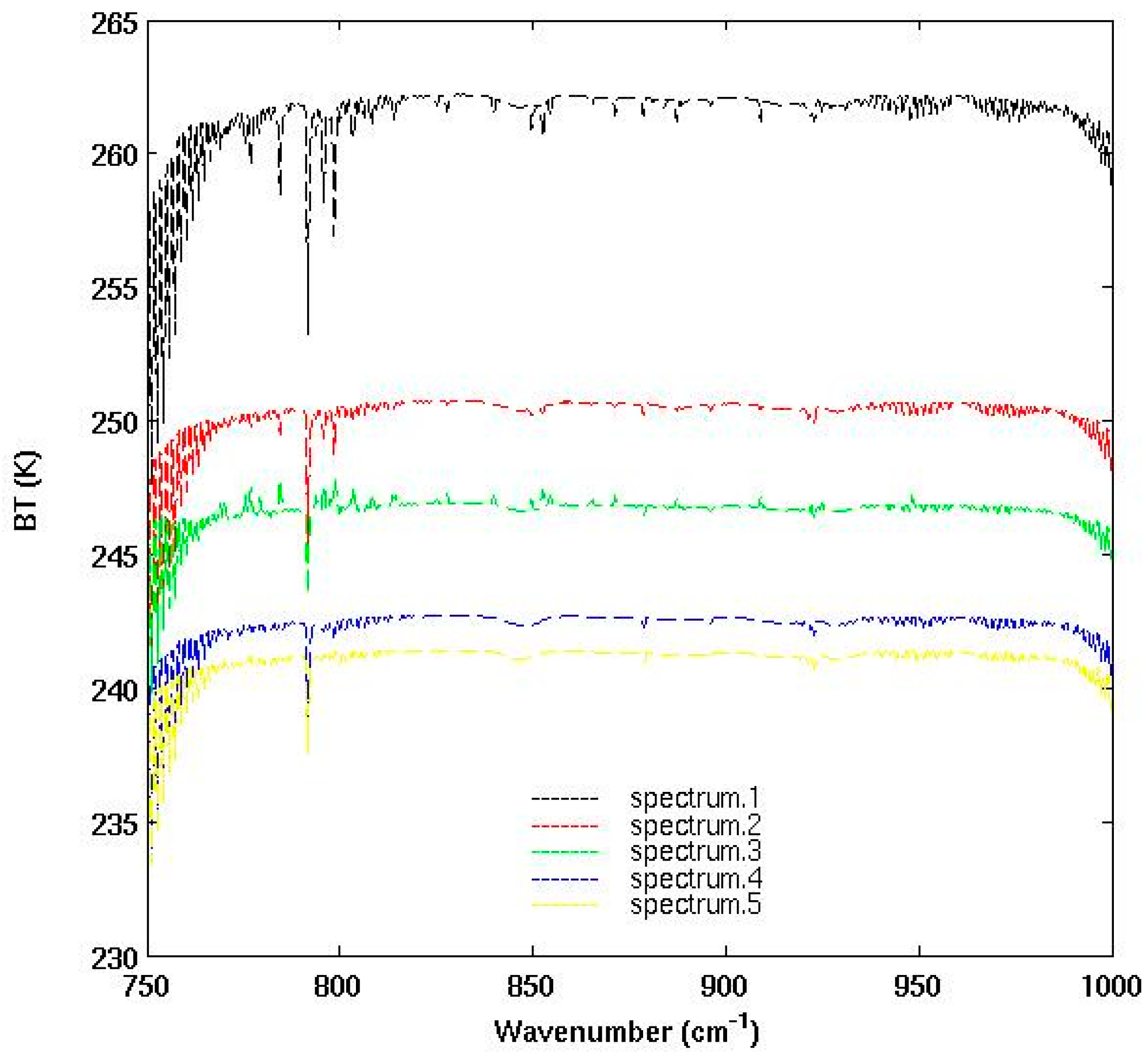
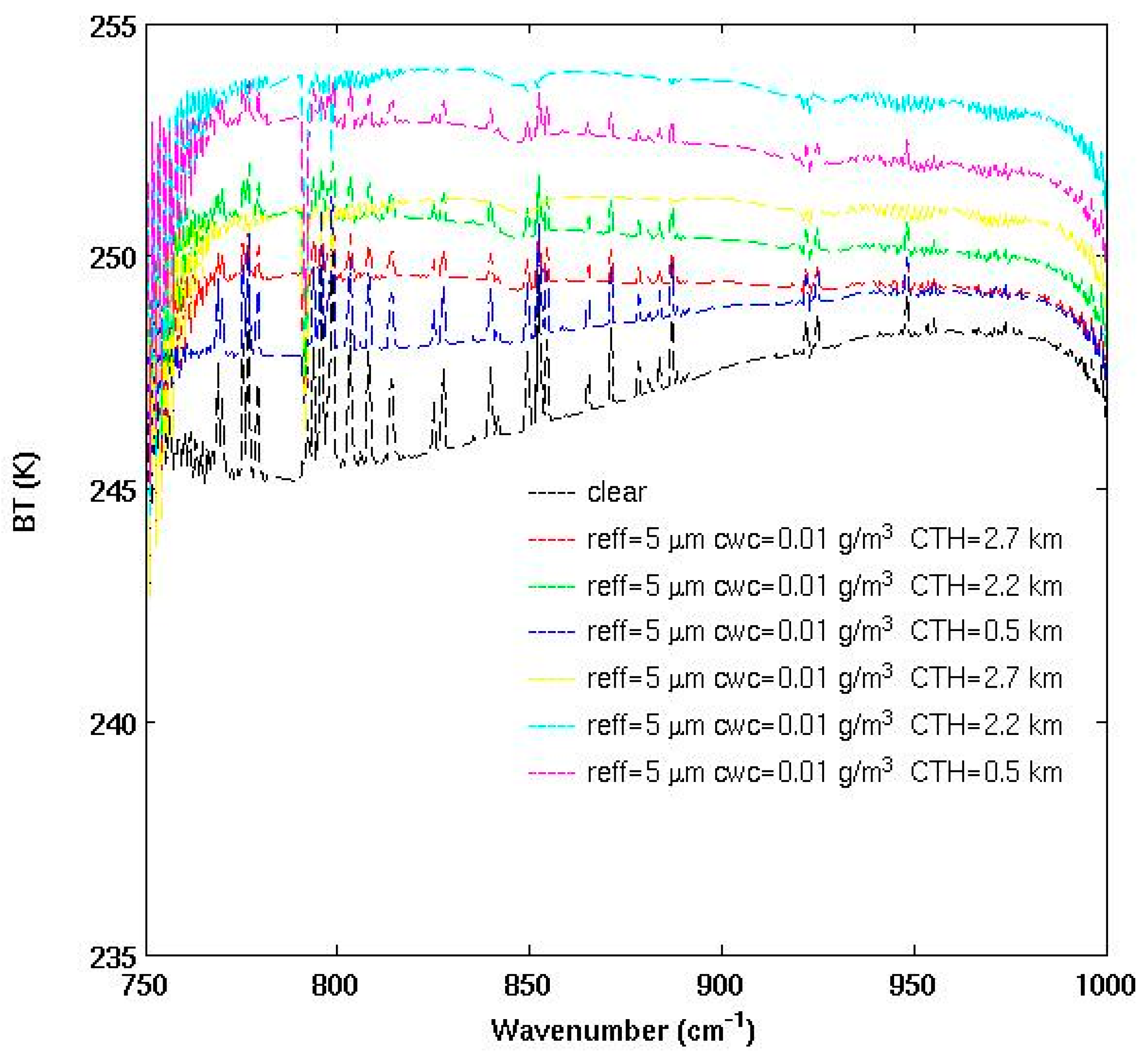
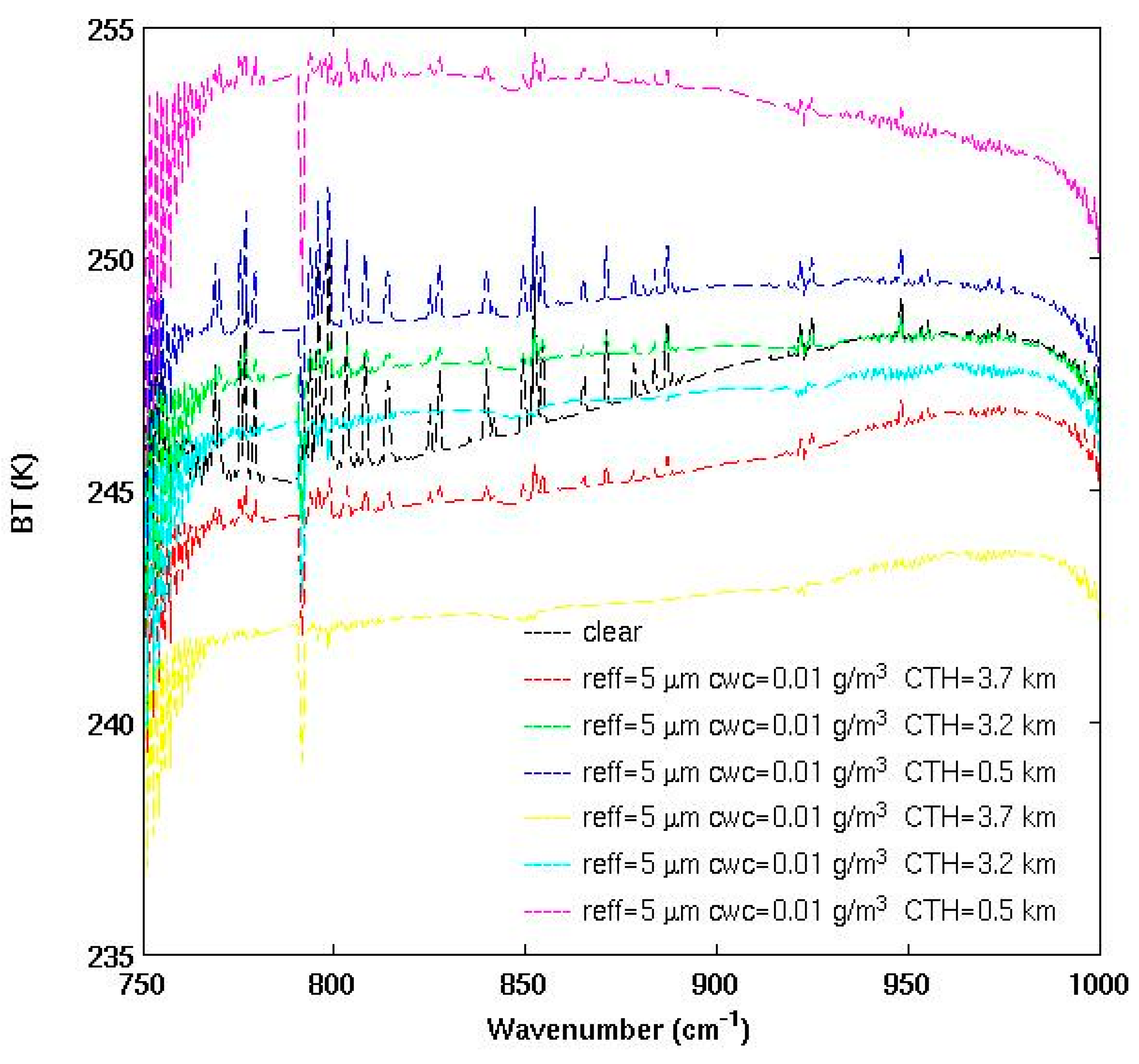
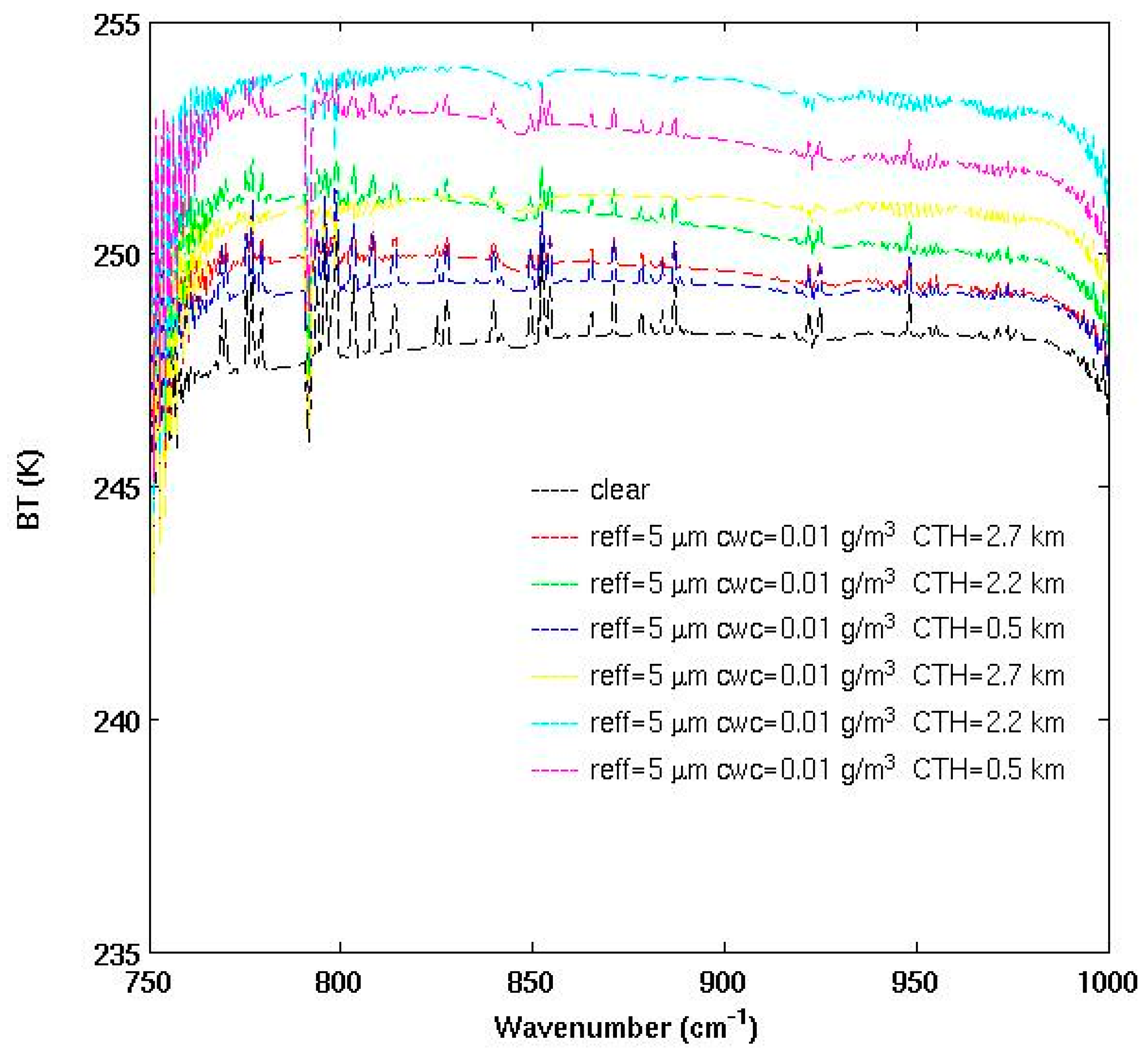
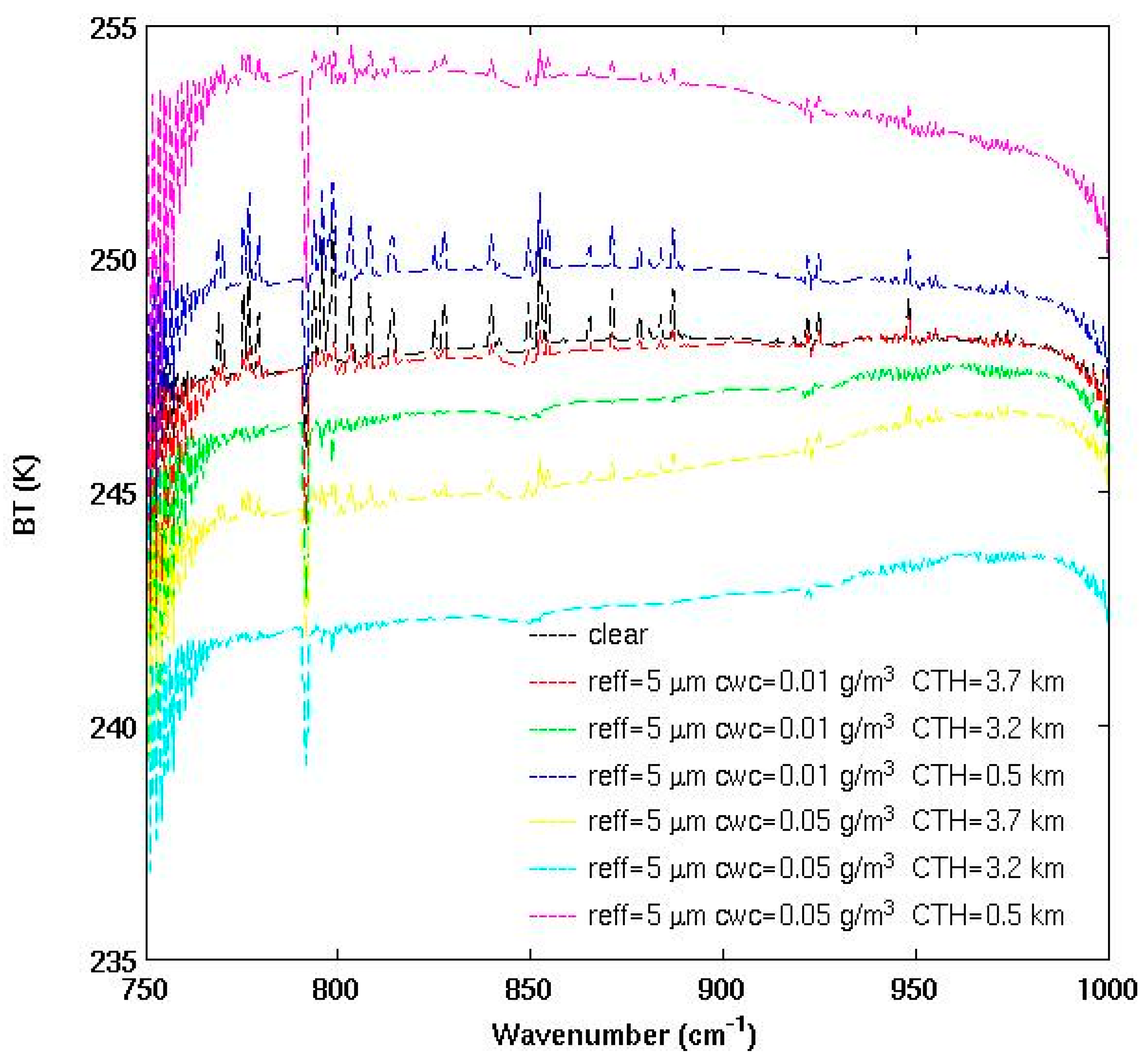
Table 2 are able to detect clear sky correctly only in the case of sea-water surface. Clear spectra are misidentified as cloudy when using ice or snow surfaces, because surface emissivity spectral features cause clear-sky BTs to resemble cloud signatures in the 750–1000 cm
−1 range (
Figure 3). These results confirm that night-time window IR threshold tests are not able to detect clear-sky spectra on ice and snow surfaces. We also applied the above-mentioned tests to the simulated cloudy spectra described in
Section 3. The results are reported in
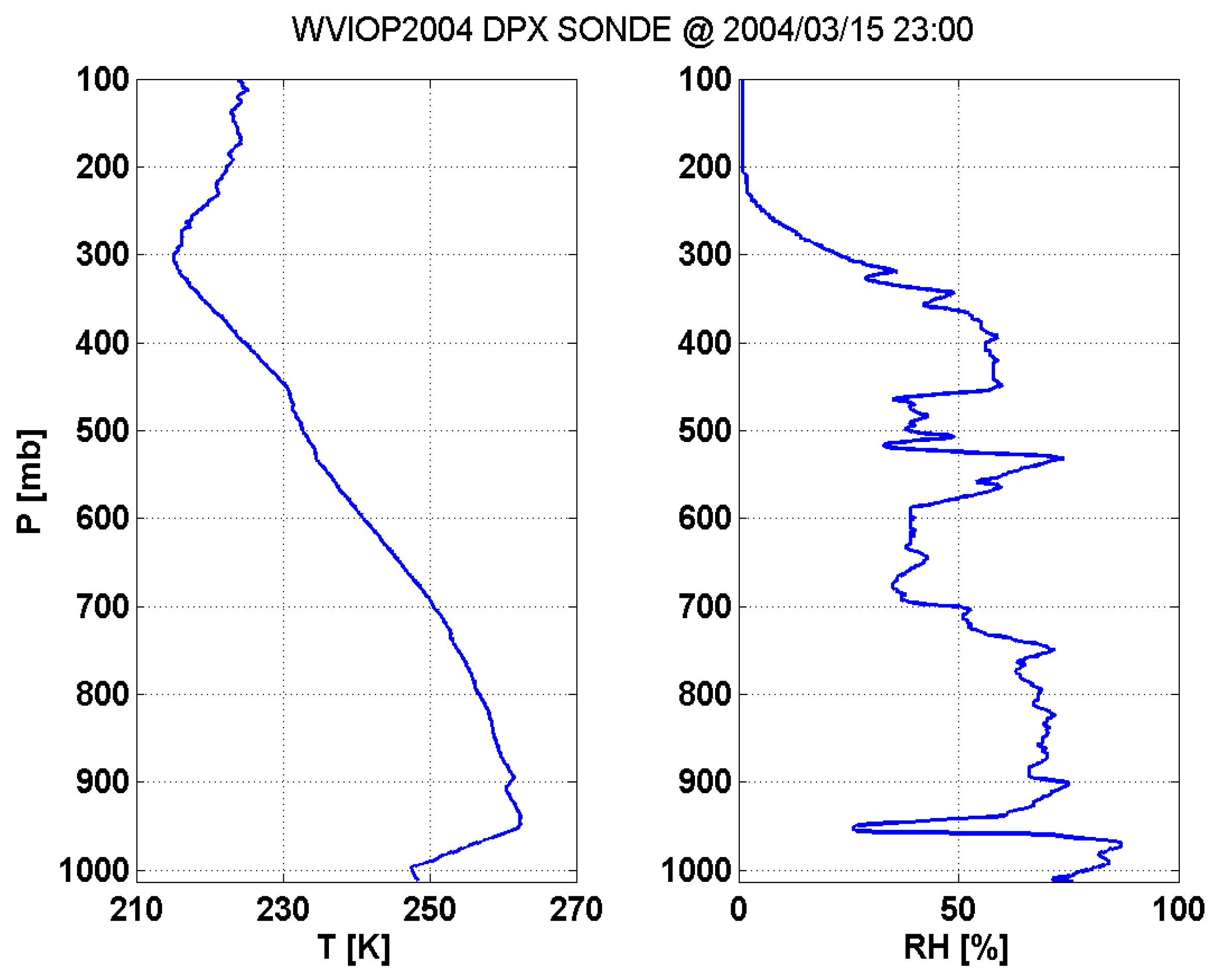
Table 4. The tests misidentified “cloud-as-clear” for about 20–30% of the spectra, depending upon the surface emissivity used. In order to improve the capability of detecting clouds in the polar region, we examined the clear-sky spectral signal in the window region between 750–1000 cm
−1. We can see that the shape of the window spectrum remains the same when changing atmospheric profiles and using the same emissivity (
Figure 3 and
Figure 4).
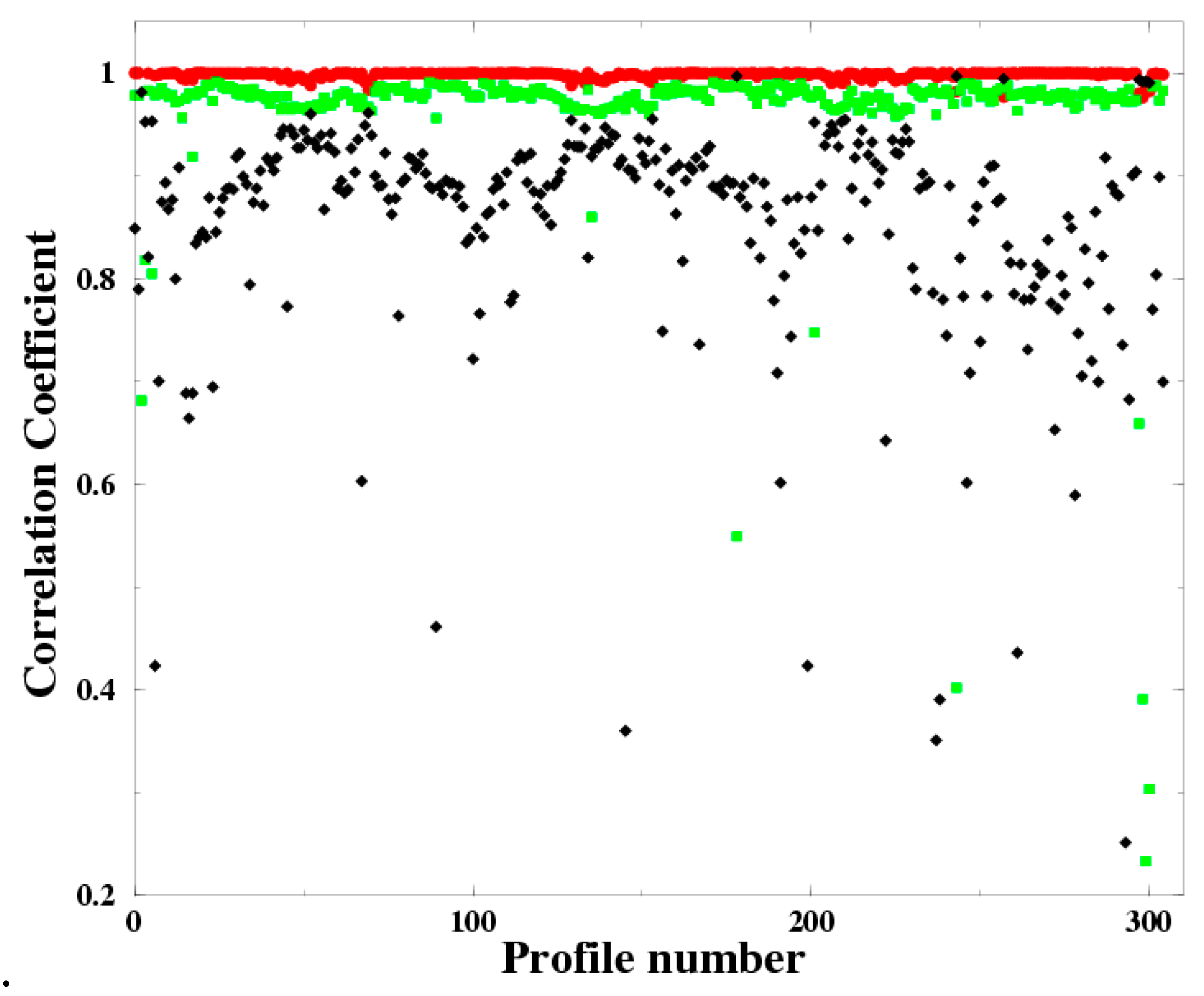
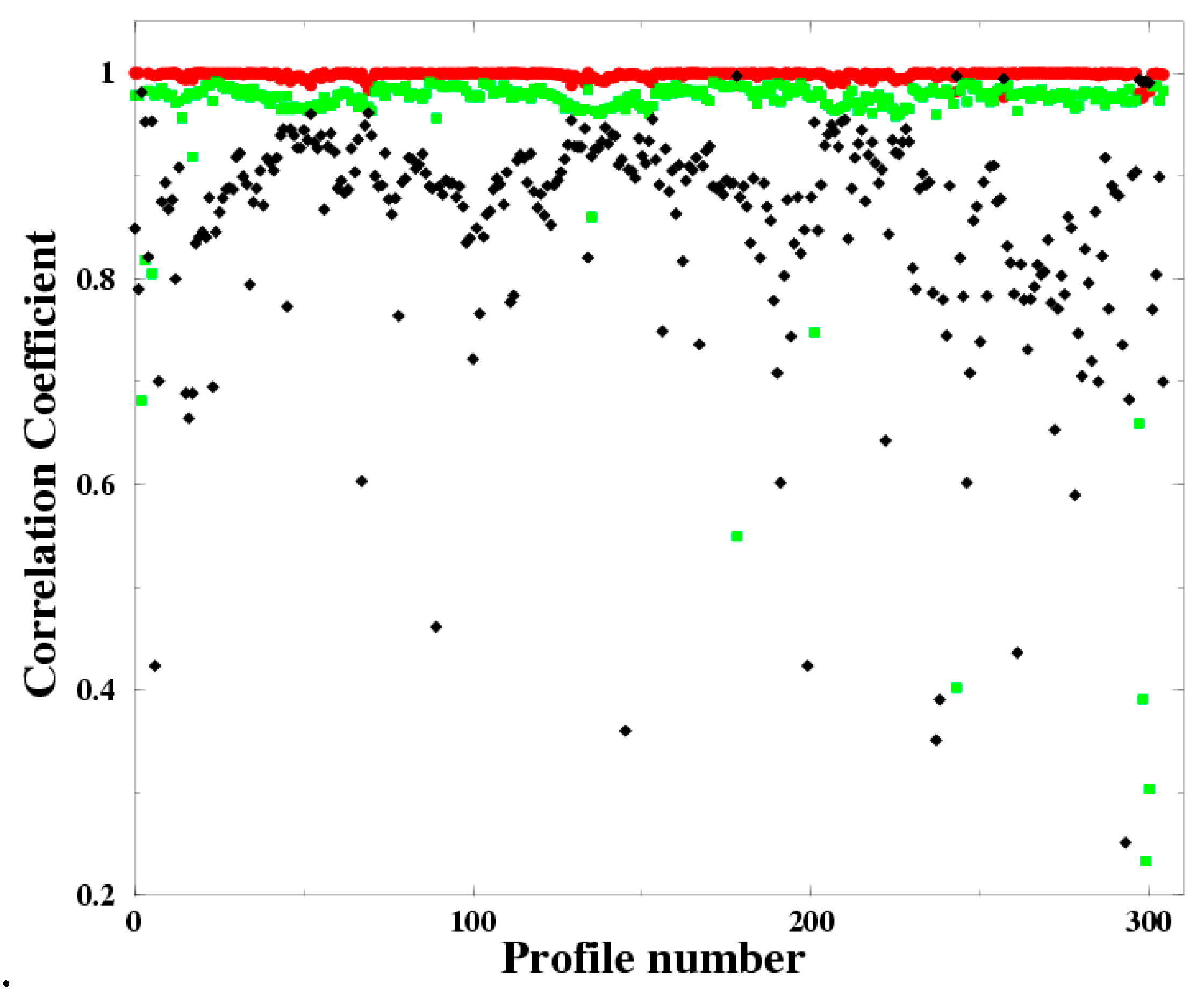
For evaluating the variability of the correlation between the simulated spectra, we computed the correlation coefficient between a reference clear IASI spectrum simulated with a fixed emissivity and 912 clear IASI spectra simulated using temperature and humidity profiles and ice, sea-water, and snow emissivity (as described in
Section 3). In particular, for fixed ice emissivity the correlation coefficients are reported in
Figure 11. The correlation coefficient estimation is restricted to a set of microwindows, centred at 787.5, 820.5, 874.0, and 960.0 cm
−1 with a width of 5 cm
−1. These microwindows have been determined by minimizing the noise in order to give a sufficiently fine representation of the window shape.
The calculation indicates that the correlation coefficient between different clear IASI spectra simulated with the same emissivity, but different temperature and humidity profiles, reaches values close to 1. In order to detect cloud and clear simulated spectra (as described in
Section 3) we calculated the correlation coefficient between a fixed clear and the examined IASI spectra. If the correlation coefficient is greater than 0.98 the spectrum is declared clear, otherwise it is declared as cloudy. This threshold has been derived considering both simulated and measured IASI spectra for different emissivities.
Applying this correlation test (denominated Test 1 in the following) to the cloud simulated spectra, the number of cloudy spectra detected as clear decreases considerably with respect to the IR tests, and most of the clear spectra are detected correctly (
Table 3).
In order to validate the correlation test with real data, we built a database with IASI clear spectra measured in the Arctic region including 500 night granule IASI l1c data from 1 November to 31 December 2008 between 55°N–75°N and 149°W–168°E. Of these granules, 400 are used for building the clear dataset, and the others for validating the algorithm. The emissivity has been derived from MOD11 surface products [
58], and the MODIS product is derived from a physics-based day/night LST algorithm used to retrieve surface band emissivities and temperatures simultaneously from a pair of daytime and nighttime MODIS observations in 20, 22, 23, 29, and 31–33 channels over all types of land cover. The clear IASI spectra are identified by using 2B-GEOPROF-LIDAR products. The correlation coefficients for Test 1 have been computed between the examined IASI spectrum and a restricted set of spectra selected among the measured clear IASI database according to the surface and satellite zenith angle. If the correlation coefficient (Test 1) is below a certain dynamic threshold [
59] the spectrum is identified as cloudy, while if the correlation test is successful, the spectrum in analysis undergoes the following additional tests in order to estimate if it is clear or partially cloudy. The correlation for sea-water surface (
Figure 11) and also for other non-heterogeneous surfaces is much lower, and consequently the test works less well. For this reason, these three other tests have been added to detected cloudy FOVS.
Test 2 is the shortwave-longwave (SW-LW) window test. This test uses brightness temperatures of two IASI atmospheric window channels, one in the shortwave (SW) region at 2558.224 cm
−1 and the other in the longwave (LW) region at 903.5 cm
−1. The field of view is clear if the difference between the two channels remains within the predetermined dynamic thresholds e
1a and e
1b [
59].
Test 3 is the shortwave-longwave (SW LW) test. A set of 92 IASI channels in the LW region are used to predict the IASI channel at 2525.130 cm
−1 in the SW. The regression analysis is done with a least square stepwise backward glance technique [
60]. The code used for the regression is RLSTP on the International Mathematical and Statistical Library (IMSL) [
61]. The best predictors are extracted from the first 1421 IASI SW channels and they are found to be the same for all the scanning angles. The selected 92 predictors explain more than 99.99% of the total variance. The field of view is defined as clear if the difference between the predicted and observed brightness temperatures is within fixed dynamic thresholds e
1a and e
1b.
Test 4 is the Window spatial variability test. This final test is based on one IASI LW window channel (903.5 cm
−1). For each FOV, the brightness temperature at this channel is compared with the BT values of the surrounding FOVs (3 × 3 box), corresponding to similar characteristics in terms of surface type and orography. If the brightness temperature of the central FOV is colder than the values of surrounding FOVs by more than a selected threshold, the central FOV is categorized as cloudy. These tests were also used with success in the Atmospheric Infrared Sounder (AIRS) cloud detection [
59]. The IASI FOV is classified as clear if at least one of the tests in the sequence 2 to 4 is successful, otherwise the FOV is classified as partially cloudy.
The dynamic thresholds are obtained from the use of the measured and simulated clear-sky datasets. Simulated data provide a useful estimate of the variability of the threshold values around the mean value that should be exploited. In this approach, the difference between the predicted and measured channel brightness temperatures is assumed to be within a range, whose medium value is calculated from the measured data, while the boundaries (minimum and maximum) are estimated from the simulated data. The cloud detection scheme selects the dynamic threshold values and the test coefficients according to the satellite zenith angle, land cover, and the maximum spectrum brightness temperature [
59].
5. Validation of Cloud Detection
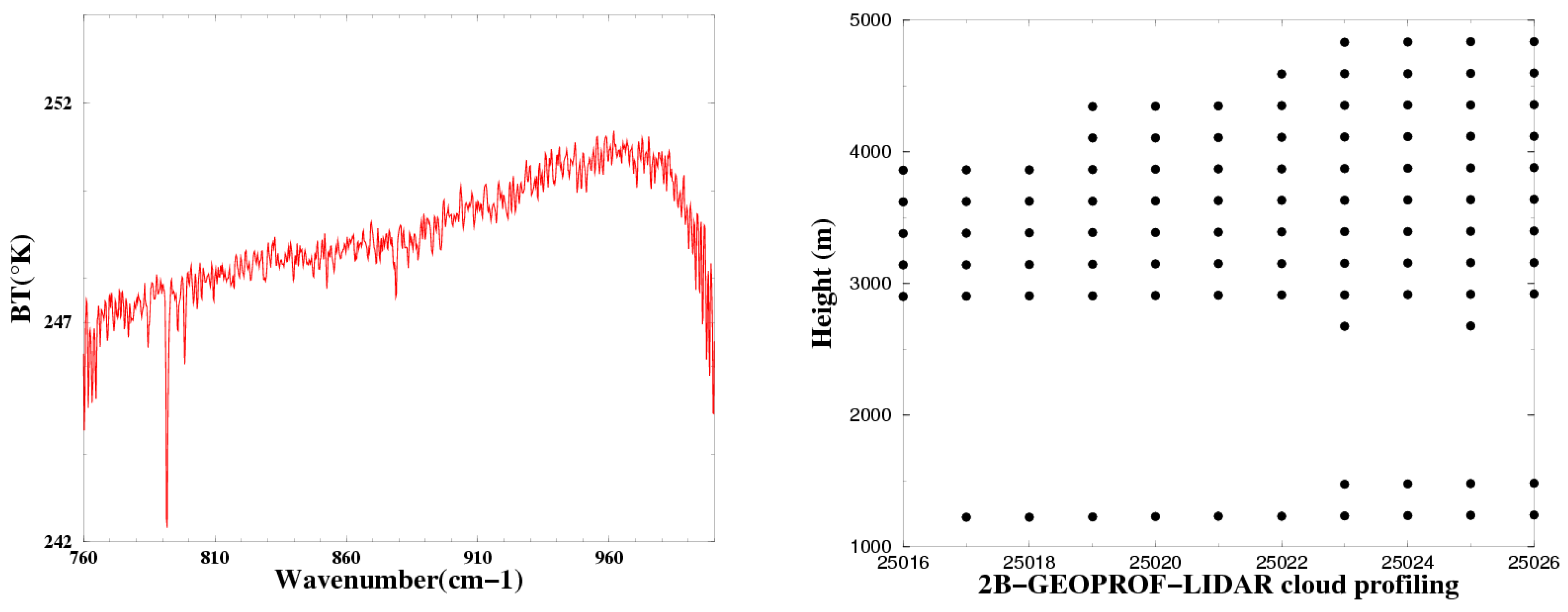
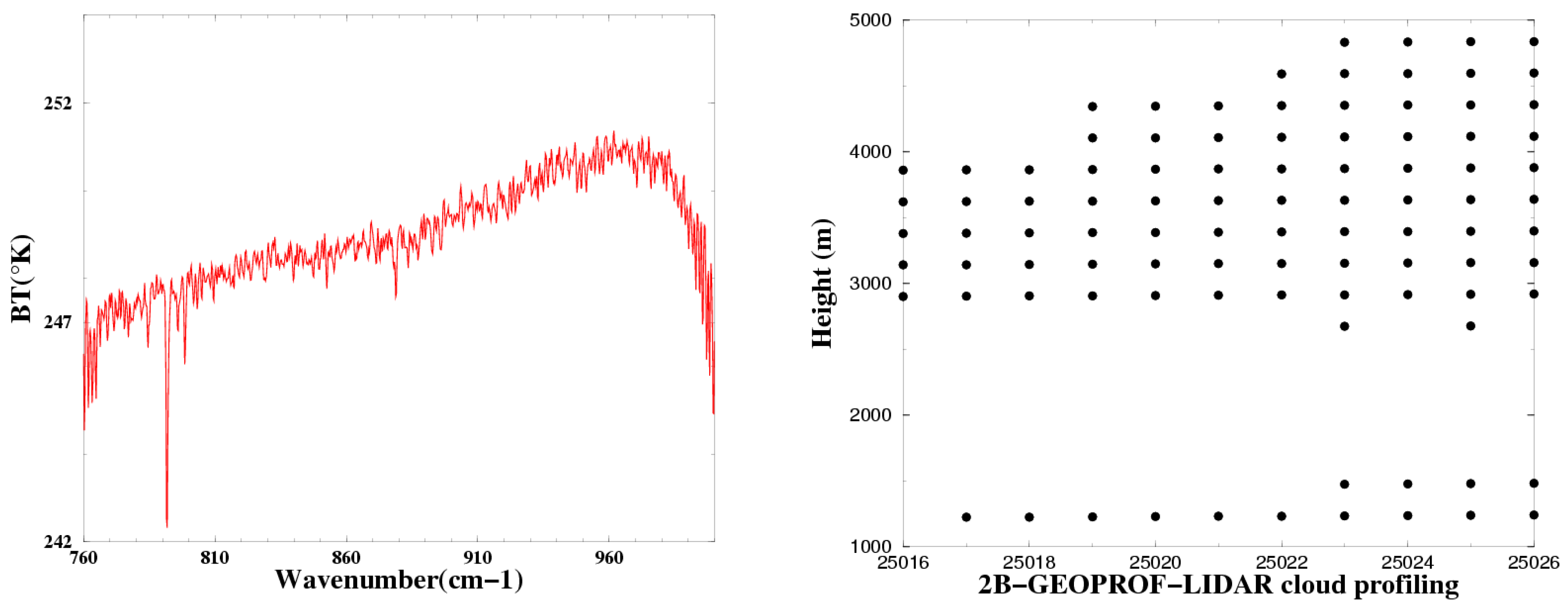
The validation of the arctic cloud detection algorithm was carried out on the basis of spatial and temporal co-located products from 2B-GEOPROF-LIDAR and the Advanced Very High Resolution Radiometer (AVHRR/3). The first step considers the 2B-GEOPROF-LIDAR product within the IASI FOV; if this contains both clear and cloudy 2B-GEOPROF-LIDAR pixels, the IASI FOV is classified as “partially cloudy”, otherwise the procedure goes to the next step. Thus, the second step is reached only if the 2B-GEOPROF-LIDAR pixels are all either clear or cloudy, though this information cannot be extended to the IASI FOVs, since IASI FOVs are always larger than the area covered by the 2B-GEOPROF-LIDAR product. Let us note that the CPR footprint is approximately 2.5 km (along track) by 1.4 km (across-track), while the IASI FOV size is 12 km at nadir. The CloudSat/CPR overlaps IASI FOVS along a diagonal, so that the IASI FOV is never completely covered by the CPR pixels. The number of pixels along the CloudSat/CALIPSO track within the IASI footprint depends on the satellite view angle.
Figure 12 shows one IASI spectrum and the 2B-GEOPROF-LIDAR cloud profiling product co-located on the IASI footprint for a high cloud.
In the second step, the homogeneity of the IASI FOVs is investigated by using simultaneous AVHRR data within the IASI FOVs. The homogeneity criterion is satisfied when all the AVHRR/3 FOVs co-located on the IASI FOV are either clear or cloudy, then the IASI FOV is classified as “clear” or “cloudy” according to the 2B-GEOPROF-LIDAR product (all either clear or cloudy). If the homogeneity criterion is not satisfied, then the IASI FOV is classified as “partially cloudy”. It is worth noting that the Mask AVHRR for Inversion ATOVS (MAIA) cloud detection [
62] has been used to classify AVHRR FOVs. The performances for tests 1 to 4 (denominated TS1–4 tests from now onwards) and for the IR tests are described in terms of probability of detection and misidentification rates. We define N10 as the number of cloudy cases misidentified as clear (misses) and N01 the number of clear cases misidentified as cloudy (false). N11 and N00 corresponds to the number of cases correctly identified as cloudy and clear, respectively. Using these numbers we define the accuracy (A), the probability of detection (POD), the false alarm ratio (FAR), and the Hansen Kuipers discriminant (HK) as the following:
| A = (N11 + N00)/(N11 + N00 + N01 + N10) |
| POD = N11/(N10 + N11) |
| FAR = N01/(N11 + N01) |
| HK = (N11/(N11 + N10)) − (N01/(N01 + N00)) |
In
Table 5 we report the performances, in terms of probability of detection and misidentification rates, of three cloud detection algorithms: TS1–4, the IR tests, and the tests exploited in the MODIS collection 6 (C6) for polar night-time cloud detection [
24,
26]. For homogeneous IASI FOVs, the TS1–4 tests tally with 2B-GEOPROF-LIDAR in classifying 97.54% of clear FOVs as clear and also in classifying 98.11% of cloudy FOVs as cloudy. The probability of cloud detection POD is 98.10%, while the false alarm ratio FAR is 1.23% and the HK discriminant reaches 0.95. For homogeneous IASI FOVs, the IR tests tally with 2B-GEOPROF-LIDAR in classifying 67.11% of clear FOVs as clear and 70.91% of cloudy FOVs as cloudy; POD is 70.91%, while the false alarm ratio is 18.79% and the HK discriminant is 0.38.
Table 6 and
Table 7 show the performance of the TS1–4, IR tests, and MODIS C6 in terms of probability of detection and misidentification rates for clouds with the optical depth smaller or larger than three, respectively. The cloud optical depth, the 2B-TAU product, is distributed by the CloudSat data processing centre (
http://cloudsat.atmos.colostate.edu/). The 2B-TAU product is based on MODIS radiance data, CPR reflectivity and other ancillary data (e.g., geolocation, surface albedo, and time). The cloud optical depth (COD) has been estimated only for completely covered homogeneous IASI FOVS, and the homogeneity is investigated by AVHRR. If the 2B-GEOPROF-LIDAR COD is the same for the all pixels within the IASI footprint, we suppose that it is the same for the whole IASI FOV. For a cloud optical depth smaller than three, the TS1–4 tests tally with 2B-GEOPROF-LIDAR in classifying 97.89% of cloudy FOVs as cloudy. For a cloud optical depth greater than three the TS1–4 tests classify 98.15% of cloudy FOVs correctly. Therefore, the tests confirm good performances for thin clouds also. The IR tests tally with 2B-GEOPROF-LIDAR in classifying 67.16% and 71.49% of cloudy FOVs as cloudy respectively for cloud optical smaller or larger than three. For non-homogenous partially cloudy IASI FOVs, the TS1–4 tests detect 88.5% of FOVs correctly (
Table 8). Judging from the 2B-GEOPROF-LIDAR product, by visual inspection of several cases, the lower score in partially cloudy cases is typically due to low broken clouds that are not often identified correctly by the tests. Nonetheless, the TS1–4 tests together with dynamic land cover information considerably increase the accuracy of the cloud mask when compared to the IR tests.
6. Conclusions
This work reports on the results obtained investigating the effect of surface emissivity on polar night-time cloud detection algorithms. Based on a simulated dataset of IR upwelling radiation spectra with different emissivities, cloud phases, optical depths, and particle effective radii and shapes, we find that uncertainties in surface emissivity play a dominant role in the performances of the window threshold test often used in cloud detection during the night. In fact, clear-sky spectra computed by using typical polar surface emissivities do resemble cloud signatures, especially in the 750–1000 cm−1 range. This causes inaccuracy when using cloud detection techniques relying on thresholds (e.g., BT(11 μm)–BT(12 μm) test). As such, the performances of polar night-time cloud detection algorithms based on IASI simulated data show relatively low “cloudy-as-clear” but large “clear-as-cloudy” misidentification rates. This suggests that detection techniques relying on thresholds are appropriate for definite areas with well-known and/or stable surface emissivity, but the same threshold may not be exported to other polar areas with different characteristics. The cloud detection tests proposed here are able to detect cloudy IASI FOVs in the Arctic region, for different and complex surface types. For homogenous IASI FOVs, the cloud detection scheme tallies with combined radar-lidar detection (2B-GEOPROF-LIDAR) in correctly classifying 98.11% of FOVs as cloudy and also in correctly classifying 97.54% of FOVs as clear. The probability of cloud detection (POD) is 98.10% and the false alarm (FAR) is 1.23 and the HK discriminant reaches 0.95. For non-homogenous partially cloudy IASI FOVs, the cloud detection scheme detects 88.5% of FOVs correctly. For cloud optical depths smaller than three, the cloud detection scheme classifies 98.15% of FOVs correctly. Therefore, the cloud detection tests proposed also confirm good performances for thin clouds. This lower score is found to be caused by the presence of low broken clouds that are often identified incorrectly. The proposed tests together with dynamic emissivity information derived from MODIS products considerably increase the capacity to detect clouds during the polar night with respect to the other tests available in the open literature. Future work will be dedicated to investigate in more detail the cases of misdetection. In particular, it is interesting to study the impact of the emissivity variability within the IASI FOV and the effect of rapidly changing emissivity conditions due to events on shorter time-scales than the 16-day MODIS surface emissivity product.


 ,
, 







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}