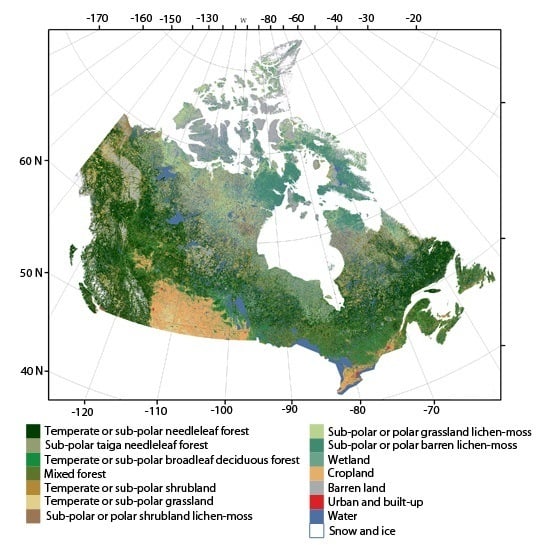
Circa 2010 Land Cover of Canada: Local Optimization Methodology and Product Development

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Landsat Data and Processing
2.2. Ancillary Data
2.3. Land Cover Mapping
2.3.1. Generation of Training and Testing Data
2.3.2. Random Forest Local Optimization and Blending
2.3.3. Mapping of Urban and Agriculture Areas
2.3.4. Additional Corrections and Quality Control
3. Results
4. Discussion
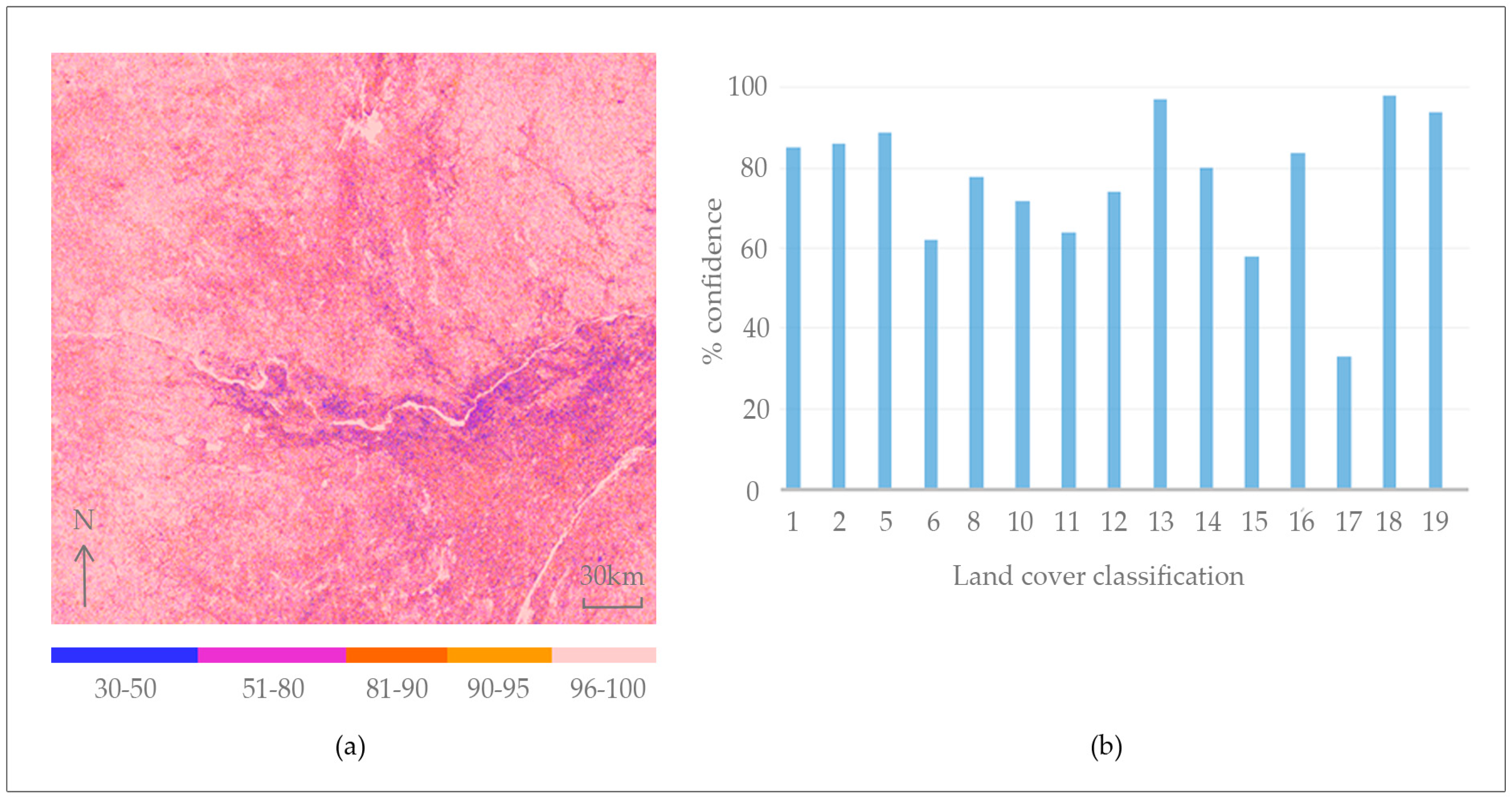
4.1. Classification Algorithm Confidence
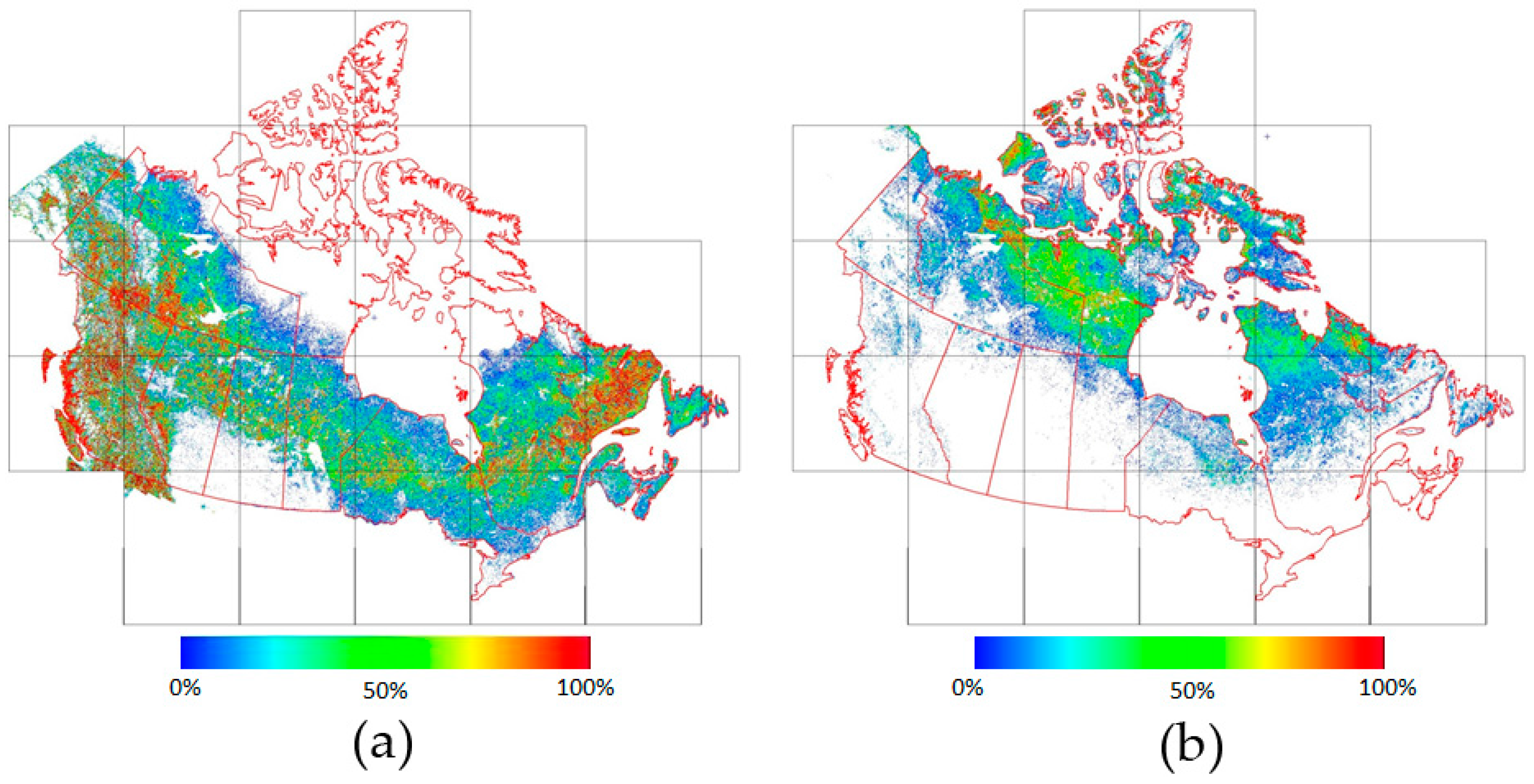
4.2. Land Cover Spatial Distribution Consistency
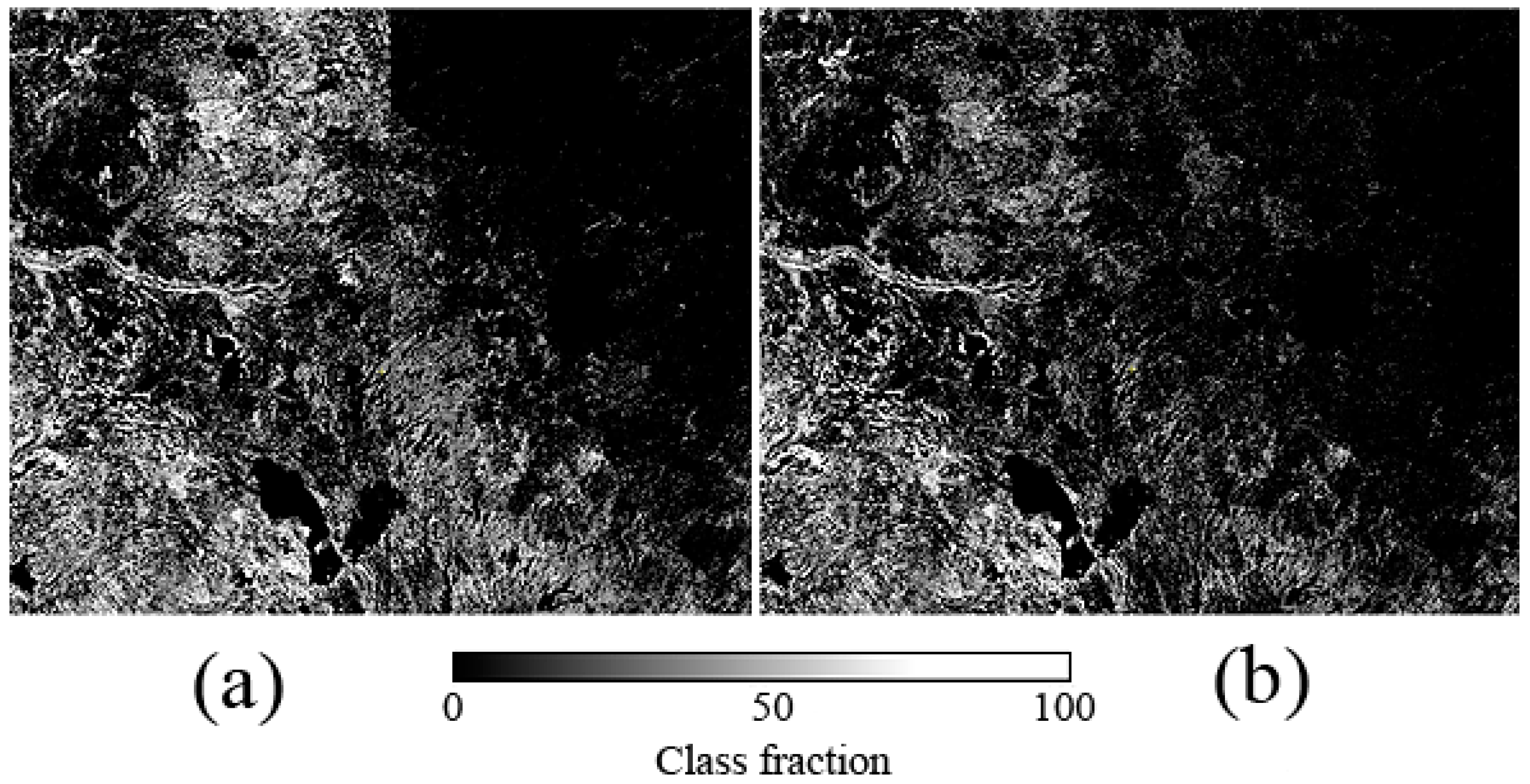
4.3. Local Classifier Characteristics
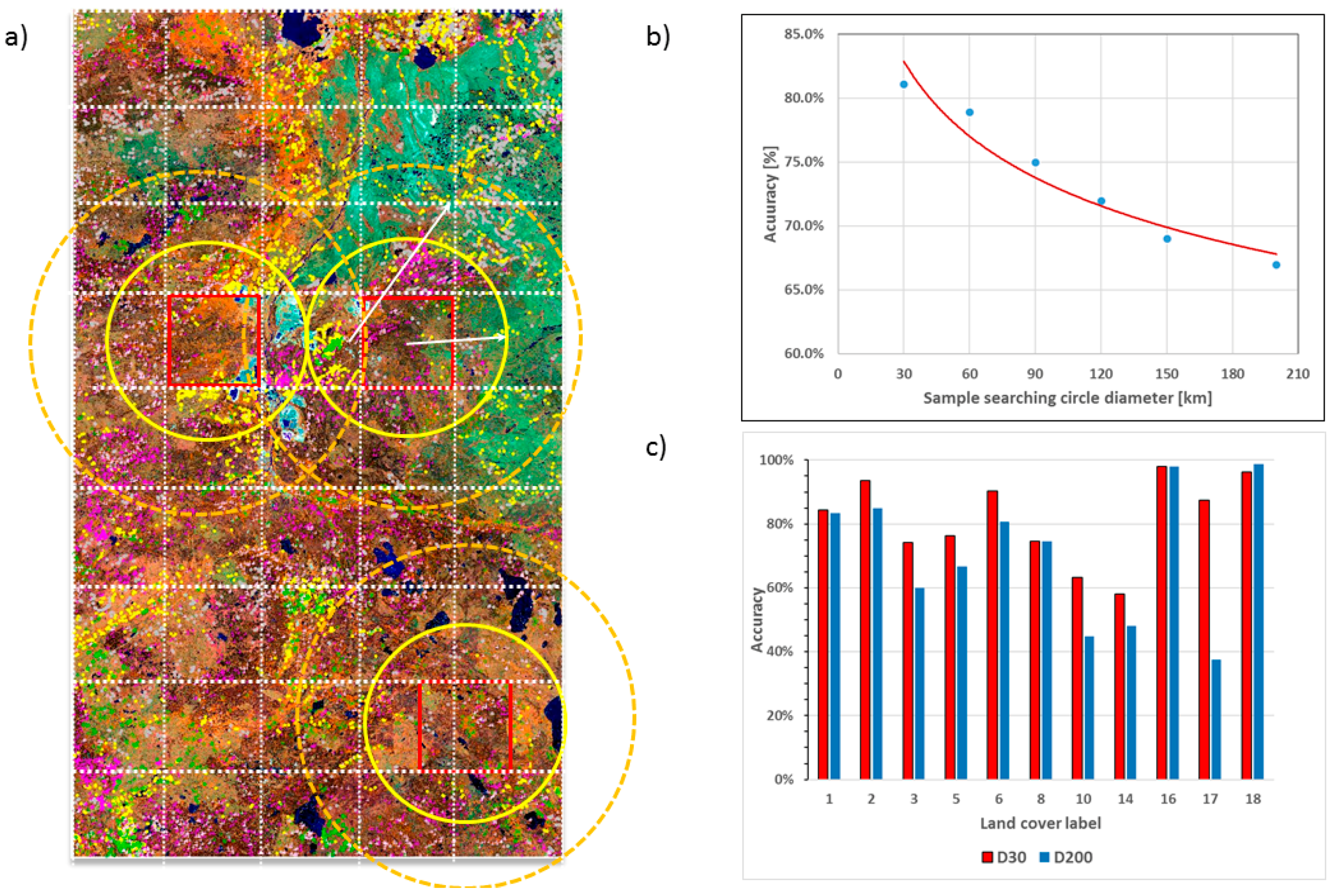
4.4. Land Cover Map Accuracy Assessment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- DB Geoservices Inc. GeoBase Land Cover Products User Needs Assessment; Agriculture and Agri-Food Canada: Ottawa, ON, Canada, 2008.
- GCOS. Systematic Observation Requirements for Satellite-Based Products for Climate Supplemental Details to the Satellite-Based Component of the Implementation Plan for the Global Observing System for Climate in Support of the UNFCCC; World Meteorological Organization (WMO): Geneva, Switzerland, 2006; Available online: https://library.wmo.int/opac/doc_num.php?explnum_id=3710 (accessed on 26 October 2017).
- CEOS. Satellite Observation of the Climate System: The Committee on Earth Observation Satellites (CEOS) Response to the Implementation Plan for the Global Observing System for Climate in Support of the UNFCCC. 2006; p. 54. Available online: ftp://ftp.ncdc.noaa.gov/pub/data/sds/CEOS-Response-to-the-GCOS-IP.pdf (accessed on 26 October 2017).
- Global Terrestrial Observing System (GTOS). Terrestrial Essential Climate Variables. Biennial Report Supplement for Climate Change Assessment, Mitigation and Adaptation. 2008, p. 44. Available online: ftp://ftp.fao.org/docrep/fao/011/i0197e/i0197e.pdf (accessed on 26 October 2017).
- Beaubien, J.; Cihlar, J.; Simard, G.; Latifovic, R. Land Cover from Multiple Thematic Mapper Scenes Using a New Enhancement-Classification Methodology. J. Geophys. Res. Atmos. 1999, 104, 27909–27920. [Google Scholar] [CrossRef]
- Latifovic, R.; Zhu, Z.L.; Josef, C.; Chandra, G.; Ian, O. Land Cover Mapping of North and Central America—Global Land Cover 2000. Remote Sens. Environ. 2004, 89, 116–127. [Google Scholar] [CrossRef]
- Pouliot, D.; Latifovic, R.; Zabcic, N.; Guindon, L.; Olthof, I. Development and Assessment of a 250 m Spatial Resolution MODIS Annual Land Cover Time Series (2000–2011) for the Forest Region of Canada Derived from Change-Based Updating. Remote Sens. Environ. 2014, 140, 731–743. [Google Scholar] [CrossRef]
- Latifovic, R.; Homer, C.; Ressl, R.; Pouliot, D.; Hossain, S.N.; Colditz, R.R.; Olthof, I.; Giri, C.P.; Victoria, A. North American Land Change Monitoring System. Remote Sens. Land Use Land Cover Princ. Appl. 2012, 303–324. [Google Scholar]
- Colditz, R.R.; Pouliot, D.; Llamas, R.M.; Homer, C.; Latifovic, R.; Ressl, R.A.; Tovar, C.M.; Hernandez, A.V.; Richardson, K. Detection of North American Land Cover Change between 2005 and 2010 with 250 m MODIS Data. Photogramm. Eng. Remote Sens. 2014, 7, 3358–3372. [Google Scholar]
- Latifovic, R.; Pouliot, D.A. Multi-Temporal Land Cover Mapping for Canada: Methodology and Products. Can. J. Remote Sens. 2005, 31, 347–363. [Google Scholar] [CrossRef]
- Latifovic, R.; Pouliot, D.; Sun, L.; Schwarz, J.; Parkinson, W. Moderate Resolution Time Series Data Management and Analysis: Automated Large Area Mosaicking and Quality Control; Geomatics Canada. Open File 2015, 6, 25. Available online: https://doi.org/10.4095/296204 (accessed on 26 October 2017).
- National Road Network, 1:50,000 Scale Geogratis. Available online: http://www.nrcan.gc.ca/earth-sciences/geography/topographic-information/free-data-geogratis/whats-new/17213 (accessed on 26 October 2017).
- SILC: Satellite Database for the Land cover of Canada Sample of LANDSAT TM/ETM+ Scenes (30 m Resolution). Available online: ftp://ftp.ccrs.nrcan.gc.ca/ad/silc (accessed on 26 October 2017).
- Wulder, M.A.; Cranny, M.M.; Hall, R.J.; Luther, J.E.; Beaudoin, A.; White, J.C.; Goodenough, D.G.; Dechka, J.A. Satellite Land Cover Mapping of Canada’s Forests: The EOSD Land Cover Project; Campbell, J.C., Jones, K.B., Smith, J.H., Koeppe, M.T., Eds.; North America Land Cover Summit; American Association of Geographers: Washington, DC, USA, 2008; pp. 21–30. Available online: https://cfs.nrcan.gc.ca/publications?id=29220 (accessed on 26 October 2017).
- Olthof, I.; Latifovic, R.; Pouliot, D. Development of a Circa 2000 Land Cover Map of Northern Canada at 30 m Resolution from Landsat. Can. J. Remote Sens. 2009, 35, 152–165. [Google Scholar] [CrossRef]
- Annual Crop Inventory. Available online: http://open.canada.ca/data/en/dataset/ba2645d5-4458-414d-b196-6303ac06c1c9 (accessed on 26 October 2017).
- Timoney, K.P.; Roi, G.H.L.; Zoltai, S.C.; Robinson, A.L. The High Subarctic Forest-Tundra of Northwestern Canada: Position, Width, and Vegetation Gradients in Relation to Climate. ARCTIC 1992, 45, 1–9. [Google Scholar] [CrossRef]
- De Groot, W.J.; Landry, R.; Kurz, W.A.; Anderson, K.R.; Englefield, P.; Fraser, R.H.; Hall, R.J.; Banfield, G.E.; Raymond, D.A.; Decker, V.; et al. Estimating Direct Carbon Emissions from Canadian Wildland Fires. Int. J. Wildland Fire 2007, 16, 593–606. [Google Scholar] [CrossRef]
- National Centers for Environmental Information. Available online: https://www.ncei.noaa.gov/ (accessed on 28 August 2017).
- Breimann, L.; Friedman, J.; Ohlsen, R.; Stone, C. Classification and Regression Trees; Taylor & Francis Group, LLC: Abingdon, UK, 1984. [Google Scholar]
- DeFries, R.; Hansen, M.; Townshend, J.R.G.; Sohlberg, R. Global Land Cover Classifications at 8 km Spatial Resolution: The Use of Training Data Derived from Landsat Imagery in Decision Tree Classifiers. Int. J. Remote Sens. 1998, 19, 3141–3168. [Google Scholar] [CrossRef]
- Hansen, M.; Dubayah, R.; DeFries, R. Classification Trees: An Alternative to Traditional Land Cover Classifiers. Int. J. Remote Sens. 1996, 17, 1075–1081. [Google Scholar] [CrossRef]
- Friedl, M.A.; Brodley, C.E.; Strahler, A. Land Cover Classification Accuracies Produced by Decision Trees at Continental to Global Scales. IEEE Trans. Geosci. Remote Sens. 1999, 37, 969–977. [Google Scholar] [CrossRef]
- Friedl, M.A.; McIver, D.K.; Hodges, J.C.F.; Zhang, X.Y.; Muchoney, D.; Strahler, A.H.; Woodcock, C.E.; Gopal, S.; Schneider, A.; Cooper, A.; et al. Global Land Cover Mapping from MODIS: Algorithms and Early Results. Remote Sens. Environ. 2002, 83, 287–302. [Google Scholar] [CrossRef]
- Friedl, M.A.; Sulla-Menashe, D.; Tan, B.; Schneider, A.; Ramankutty, N.; Sibley, A.; Xiaoman, H. MODIS Collection 5 Global Land Cover: Algorithm Refinements and Characterization of New Datasets. Remote Sens. Environ. 2010, 114, 168–182. [Google Scholar] [CrossRef]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Pattern Recognition Letters—Special Issue: Pattern Recognit. Remote Sens. Arch. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Pal, M. Random Forest Classifier for Remote Sensing Classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An Assessment of the Effectiveness of a Random Forest Classifier for Land-Cover Classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Breimann, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Chittineni, C.B. Signature extension in remote sensing. Pattern Recognit. 1980, 12, 243–249. [Google Scholar] [CrossRef]
- Fernandes, R.; Fraser, R.; Latifovic, R.; Cihlar, J.; Beaubien, J.; Du, Y. Approaches to Fractional Land Cover and Continuous Field Mapping: A Comparative Assessment over the BOREAS Study Region. Remote Sens. Environ. 2004, 89, 234–251. [Google Scholar] [CrossRef]
- Cihlar, J.; Guindon, B.; Beaubien, J.; Latifovic, R.; Peddle, D.R.; Wulder, M.A.; Fernandes, R.; Kerr, J. From Need to Product: A Methodology for Completing a Land Cover Map of Canada with Landsat Data. Can. J. Remote Sens. 2003, 29, 171–186. [Google Scholar] [CrossRef]
- Homer, C.; Dewitz, J.; Fry, J.; Coan, M.; Hossain, N.; Larson, C.; Herold, N.; McKerrow, A.; VanDriel, J.N.; Wickham, J. Completion of the 2001 National Land Cover Database for the Conterminous United States. Photogramm. Eng. Remote Sens. 2007, 73, 337–341. [Google Scholar]
- Pouliot, D.; Latifovic, R.; Parkinson, W. Influence of Sample Distribution and Prior Probability Adjustment on Land Cover Classification. Geomatics Canada, Open File 23, 2016, 13 pages. Available online: http://ftp.maps.canada.ca/pub/nrcan_rncan/publications/ess_sst/297/297517/of_0023_gc.pdf (accessed on 26 October 2017).
- Millard, K.; Richardson, M. On the Importance of Training Data Sample Selection in Random Forest Image Classification: A Case Study in Peatland Ecosystem Mapping. Remote Sens. 2015, 7, 8489–8515. [Google Scholar] [CrossRef]
- Strahler, A.H.; Boschetti, L.; Foody, G.M.; Friedl, M.A.; Hansen, M.C.; Herold, M.; Mayaux, P.; Morisette, J.T.; Stehman, S.V.; Woodcock, C.E. Global Land Cover Validation: Recommendations for Evaluation and Accuracy Assessment of Global Land Cover Maps; Report of Institute of Environmental Sustainability Global Land Analysis & Discovery (GLAD): College Park, MD, USA, 2006; Available online: http://nofc.cfs.nrcan.gc.ca/gofc-gold/Report%20Series/GOLD_25.pdf (accessed on 26 October 2017).
- Foody, G.; Campbell, N.; Trodd, N.; Wood, T. Derivation and Applications of Probabilistic Measures of Class Membership from the Maximum-Likelihood Classification. Photogramm. Eng. Remote Sens. 1992, 58, 1335–1341. [Google Scholar]
- Foody, G.M. Thematic Map Comparison: Evaluating the Statistical Significance of Differences in Classification Accuracy. Photogramm. Eng. Remote Sens. 2004, 70, 627–633. [Google Scholar] [CrossRef]
- Turner, D.P.; Cohen, W.B.; Kennedy, R.E.; Fassnacht, K.S.; Briggs, J.M. Relationships between Leaf Area Index and Landsat TM Spectral Vegetation Indices across Three Temperate Zone Sites. Remote Sens. Environ. 1999, 70, 52–68. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Earth ellipsoid | GRS 1980 |
| Major semi-axis, a | 6,378,137 (m) |
| First eccentricity | 0.00669438002290 |
| Ellipsoid flattening, f | 0.00335281068118 |
| Projection | LCC |
| 1st parallel | 49.00 (degree) |
| 2nd parallel | 77.00 (degree) |
| Central meridian | −95.00 (degree) |
| Upper left corner | (−2,600,000.0 E (m); 10,500,000.0 N (m)) |
| Lower right corner | (3,100,000.0 E (m); 5,700,000.0 N (m)) |
| Easting | 0 |
| Northing | 0 |
| Title | Source |
|---|---|
| National Hydro Network, 1:50,000 scale | Canada Centre for Mapping and Earth Observation (2004) http://geogratis.gc.ca [12] |
| Canadian Digital Elevation Data, 1:50,000 scale | Canada Centre for Mapping and Earth Observation (2000) http://geogratis.gc.ca [12] |
| National Road Network, 1:50,000 scale | Canada Centre for Mapping and Earth Observation (2012) [12] http://geogratis.gc.ca |
| SILC: Satellite Information for Land Cover of Canada—a sample of LANDSAT Thematic Mapper/Enhanced Thematic Mapper (TM/ETM+) scenes (30 m resolution) | Canada Centre for Mapping and Earth Observation [13] |
| EOSD: Earth Observation for Sustainable Development of Forests Land Cover Classification, circa 2000 at 30 m resolution | Canadian Forest Service http://cfs.nrcan.gc.ca/publications?id = 29220 [14] |
| NLLC: Circa 2000 Northern Land Cover of Canada at 30 m spatial resolution | Canada Centre for Mapping and Earth Observation http://geogratis.cgdi.gc.ca [15] |
| ACCC: Agricultural Crop Cover Classification annual crop inventory, 2013, 30 m spatial resolution | AAFC Science and Technology Branch, Earth Observation Team. http://open.canada.ca [16] |
| Northern treeline | http://data.arcticatlas.org, [17] |
| National Burned Area Composites 2004–2013 | Canadian Forest Service [18] |
| Version 1 Visible Infrared Imaging Radiometer Suite (VIIRS) Day/Night Band Nighttime Lights (2012) | Earth Observation Group, NOAA National Geophysical Data Center [19] |
| Ground truth datasets | NRCan, CCRS, unpublished |
| Level I | Level II | Land Cover Classification System (LCCS) Basic Classifier | ||
|---|---|---|---|---|
| Primarily vegetated areas | Natural and semi-natural terrestrial and aquatic | 1. Needleleaf forest | 1. Temperate or sub-polar needleleaf forest | A3.A10.B2.XX.D2.E1 |
| 2. Sub-polar taiga needleleaf forest | A3.A10.B2.XX.D1.E2 | |||
| 2. Broadleaf forest | 3. Tropical or sub-tropical broadleaf evergreen forest | A3.A10.B2.XX.D1.E1 | ||
| 4. Tropical or sub-tropical broadleaf deciduous forest | A3.A11.B2.XX.D1.E1 | |||
| 5. Temperate or sub-polar broadleaf deciduous forest | A3.A14.B2.XX.D1.E1 | |||
| 3. Mixed forest | 6. Mixed forest | A3.A10.B2.XX.D2.E1/A3.A10.B2.XX.D1.E2 | ||
| 4. Shrubland | 7. Tropical or sub-tropical shrubland | A4.A20.B3–B9 | ||
| 8. Temperate or sub-polar shrubland | A4.A20.B3–B10 | |||
| 5. Grassland | 9. Tropical or sub-tropical grassland | A6.A20.B4 | ||
| 10. Temperate or sub-polar shrubland | A2.A20.B4.XX.E5 | |||
| 6. Lichen/moss | 11. Sub-polar or polar shrubland–lichen–moss | A4.A11.B3–B10/A2.A20.B4–B12/A8.A11–A13 | ||
| 12. Sub-polar or polar grassland–lichen–moss | A4.A20.B4–B12/A4.A11.B3–B10/A8.A11–A13 | |||
| 13. Sub-polar or polar barren–lichen–moss | A8.A20–A.13/A4.A11.B3–B10/A2.A20.B4–B12 | |||
| 7. Wetland | 14. Wetland | A2.A20.B4.C3 | ||
| Cultivated/managed terrestrial/aquatic | 8. Cropland | 15. Cropland | A4–S1 | |
| Primarily non-vegetated areas | Terrestrial | 9. Barren land | 16. Barren land | A1/A2 |
| 10. Urban and built-up | 17. Urban and built-up | A4 | ||
| Aquatic | 11. Water | 18. Water | A1 | |
| 12. Snow and ice | 19. Snow and ice | A2/A3 | ||
| Window | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| Class | Conifer | Conifer | Conifer | Water | Mixed | Mixed | Shrub | Water | Mixed |
| Distance (pixels) | 250 | 3500 | 5000 | 13,000 | 5000 | 9500 | 9400 | 7500 | 1000 |
| Weight | 0.94 | 0.819 | 0.70 | 0.074 | 0.706 | 0.263 | 0.271 | 0.454 | 0.929 |
| Conifer count = 3, summed distance = 2.47 Mixed count = 3, summed distance = 1.90 | |||||||||
| Comparison of Kappa Coefficients | Comparison of Proportions | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Class. 1 | Class. 2 | k1 | k2 | k1−k2 | Significant? | x1/n1 | x2/n2 | x1/n1−x2/n2 | |z| | Significant? |
| RF | Local RF | 0.63 | 0.78 | −0.155 | Yes, 0.1% | 0.67 | 0.82 | −0.141 | 10.9 | Yes, 0.1% |
| Predicted vs. Reference | Reference | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Class | 1 | 2 | 5 | 6 | 8 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | User’s Accuracy | ||
| 1. Temperate or sub-polar needleleaf forest | 381 | 1 | 10 | 27 | 21 | 4 | 0 | 0 | 0 | 18 | 0 | 5 | 0 | 1 | 0 | 381 | 468 | 81.4 |
| 2. Sub-polar taiga needleleaf forest | 7 | 13 | 0 | 0 | 1 | 2 | 1 | 0 | 0 | 4 | 0 | 0 | 0 | 0 | 0 | 13 | 28 | 46.4 |
| 5. Temperate or sub-polar broadleaf forest | 14 | 2 | 117 | 13 | 24 | 6 | 3 | 1 | 0 | 2 | 4 | 2 | 2 | 0 | 0 | 117 | 190 | 61.6 |
| 6. Mixed forest | 33 | 0 | 15 | 88 | 15 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 0 | 88 | 155 | 56.8 |
| 8. Temperate or sub-polar shrubland | 15 | 3 | 5 | 6 | 154 | 13 | 22 | 0 | 0 | 7 | 5 | 6 | 0 | 0 | 0 | 154 | 236 | 65.3 |
| 10. Temperate or sub-polar grassland | 5 | 2 | 1 | 1 | 17 | 92 | 0 | 2 | 1 | 1 | 6 | 23 | 0 | 0 | 0 | 92 | 151 | 60.9 |
| 11. Sub-polar or polar shrubland-lichen-moss | 0 | 0 | 0 | 0 | 8 | 0 | 29 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 29 | 37 | 78.4 |
| 12. Sub-polar or polar grassland-lichen-mod | 2 | 0 | 0 | 1 | 1 | 1 | 1 | 33 | 0 | 0 | 0 | 4 | 0 | 1 | 0 | 33 | 44 | 75.0 |
| 13. Sub-polar or polar barren-lichen-moss | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 13 | 6 | 0 | 6 | 0 | 0 | 1 | 13 | 26 | 50.0 |
| 14. Wetland | 6 | 0 | 2 | 3 | 8 | 5 | 1 | 2 | 1 | 67 | 0 | 2 | 0 | 1 | 0 | 67 | 98 | 68.4 |
| 15. Cropland | 5 | 0 | 18 | 2 | 23 | 49 | 0 | 0 | 0 | 4 | 735 | 0 | 3 | 0 | 0 | 735 | 839 | 87.6 |
| 16. Barren land | 2 | 1 | 0 | 2 | 1 | 5 | 1 | 0 | 1 | 0 | 5 | 86 | 1 | 1 | 6 | 86 | 112 | 76.8 |
| 17. Urban | 2 | 0 | 6 | 0 | 5 | 6 | 0 | 0 | 0 | 0 | 8 | 5 | 124 | 0 | 0 | 124 | 156 | 79.5 |
| 18. Water | 1 | 0 | 1 | 0 | 3 | 0 | 2 | 0 | 0 | 5 | 1 | 1 | 0 | 210 | 0 | 210 | 224 | 93.8 |
| 19. Snow and ice | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 9 | 0 | 0 | 38 | 38 | 47 | 80.9 |
| number of samples | 473 | 22 | 175 | 143 | 281 | 184 | 60 | 38 | 16 | 114 | 764 | 150 | 131 | 215 | 45 | 2180 | ||
| Producer’s Accuracy | 80.5 | 59.1 | 66.9 | 61.5 | 54.8 | 50.0 | 48.3 | 86.8 | 81.3 | 58.8 | 96.2 | 57.3 | 94.7 | 97.7 | 84.4 | Overall | 2811 | 77.6 |
| First Call Only | User’s | Producer’s |
| 1 × 1 MMU pixel count | 74.84 | 73.88 |
| 12 × 12 MMU pixel count | 76.12 | 74.70 |
| First and Second Call | User’s | Producer’s |
| 1 × 1 MMU pixel count | 85.96 | 84.15 |
| 12 × 12 MMU pixel count | 86.05 | 84.33 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Latifovic, R.; Pouliot, D.; Olthof, I. Circa 2010 Land Cover of Canada: Local Optimization Methodology and Product Development. Remote Sens. 2017, 9, 1098. https://doi.org/10.3390/rs9111098
Latifovic R, Pouliot D, Olthof I. Circa 2010 Land Cover of Canada: Local Optimization Methodology and Product Development. Remote Sensing. 2017; 9(11):1098. https://doi.org/10.3390/rs9111098
Chicago/Turabian StyleLatifovic, Rasim, Darren Pouliot, and Ian Olthof. 2017. "Circa 2010 Land Cover of Canada: Local Optimization Methodology and Product Development" Remote Sensing 9, no. 11: 1098. https://doi.org/10.3390/rs9111098
APA StyleLatifovic, R., Pouliot, D., & Olthof, I. (2017). Circa 2010 Land Cover of Canada: Local Optimization Methodology and Product Development. Remote Sensing, 9(11), 1098. https://doi.org/10.3390/rs9111098