
Decomposing DInSAR Time-Series into 3-D in Combination with GPS in the Case of Low Strain Rates: An Application to the Hyblean Plateau, Sicily, Italy



Abstract
:
1. Introduction
1.1. Techniques of Atmospheric Correction
1.2. Techniques for Decomposing the DInSAR Signal into a 3-Dimensional Velocity Field
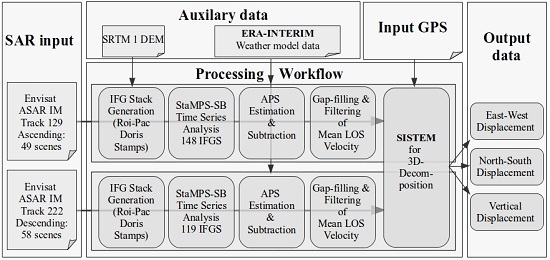
2. Method and Data Collection
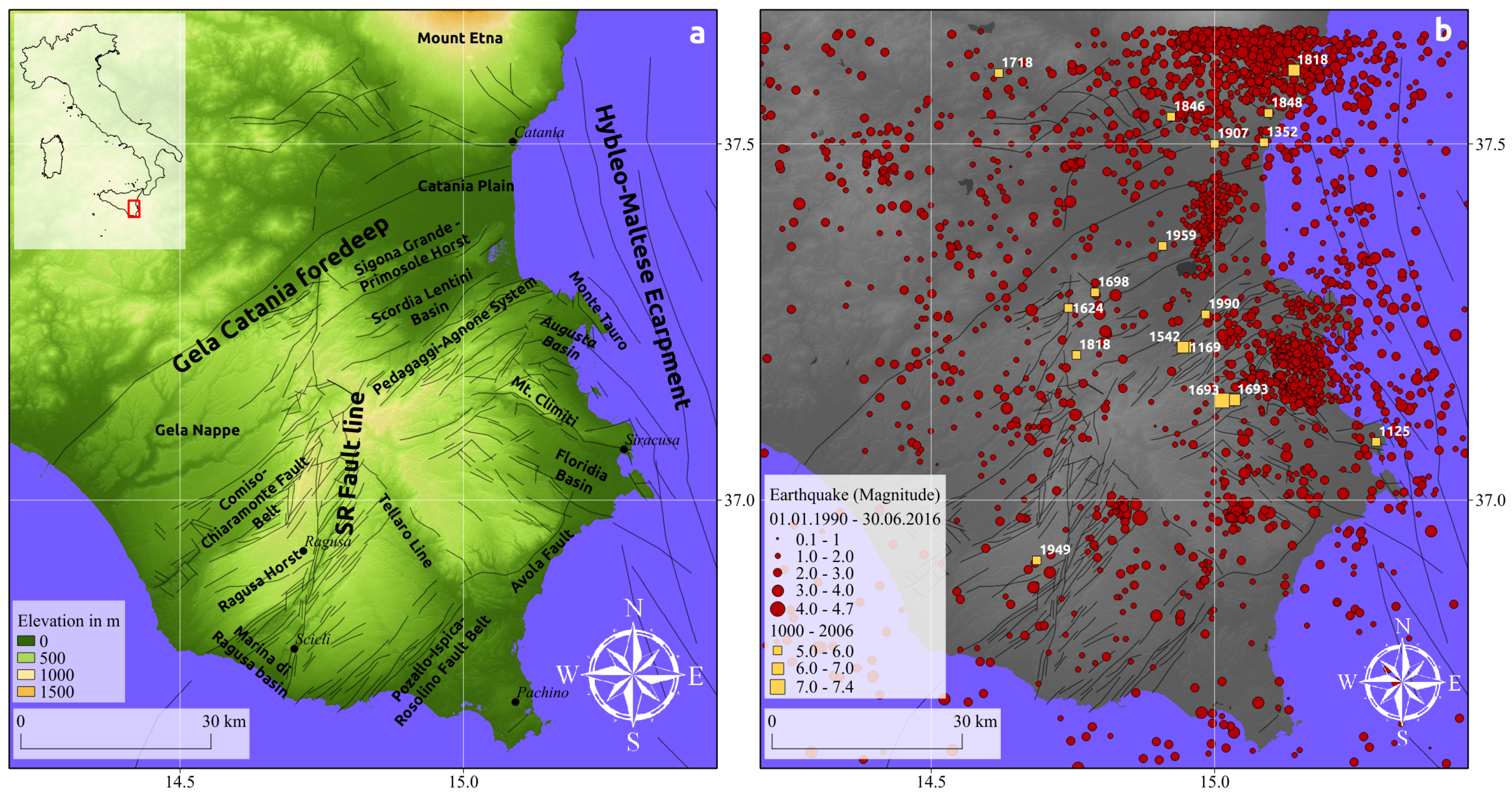
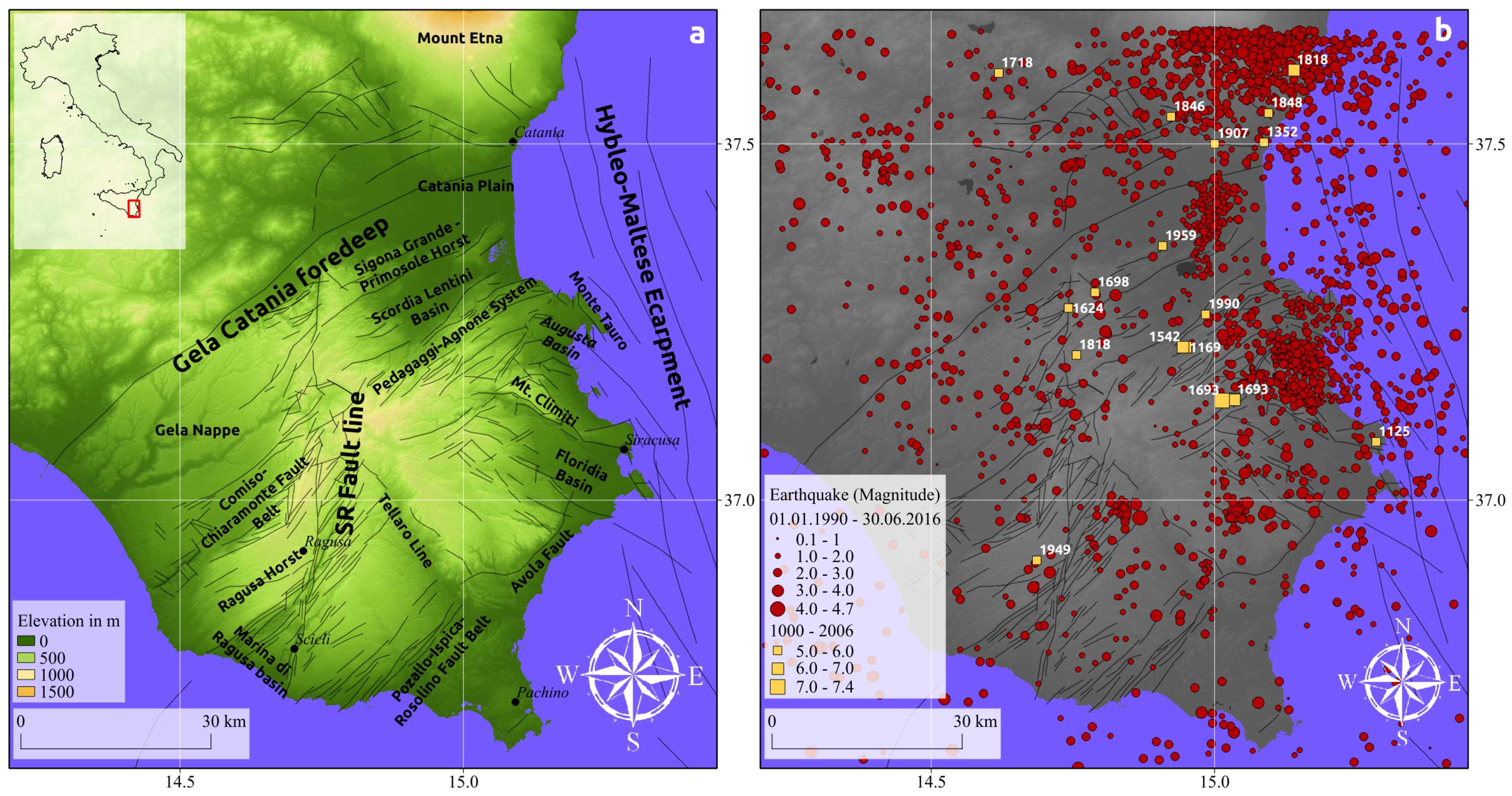
2.1. Study Area
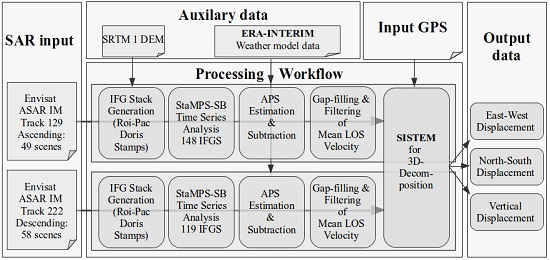
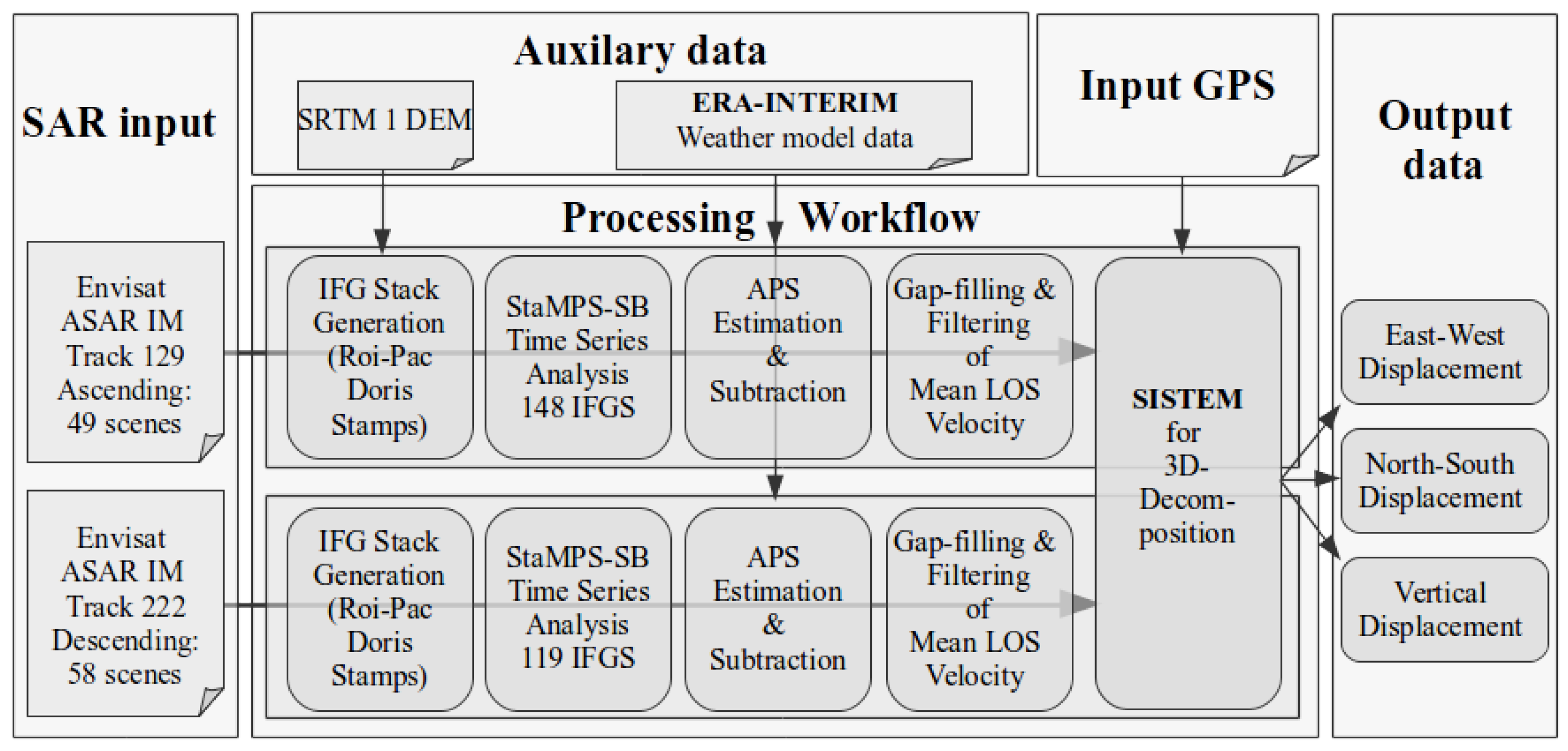
2.2. Data Collection & Processing
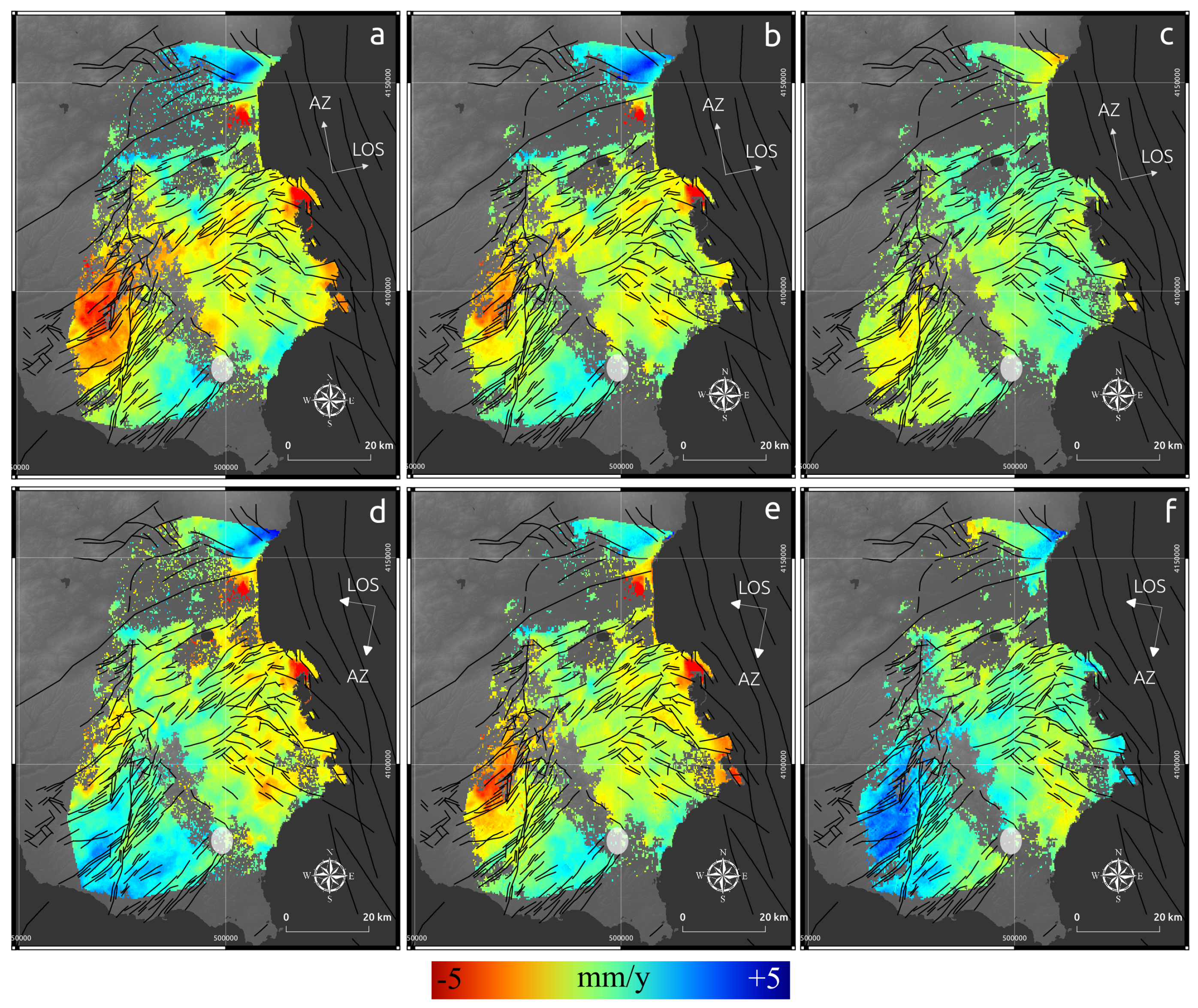
2.2.1. DInSAR Processing
2.2.2. Tropospheric Correction
2.2.3. Spatial Enhancement
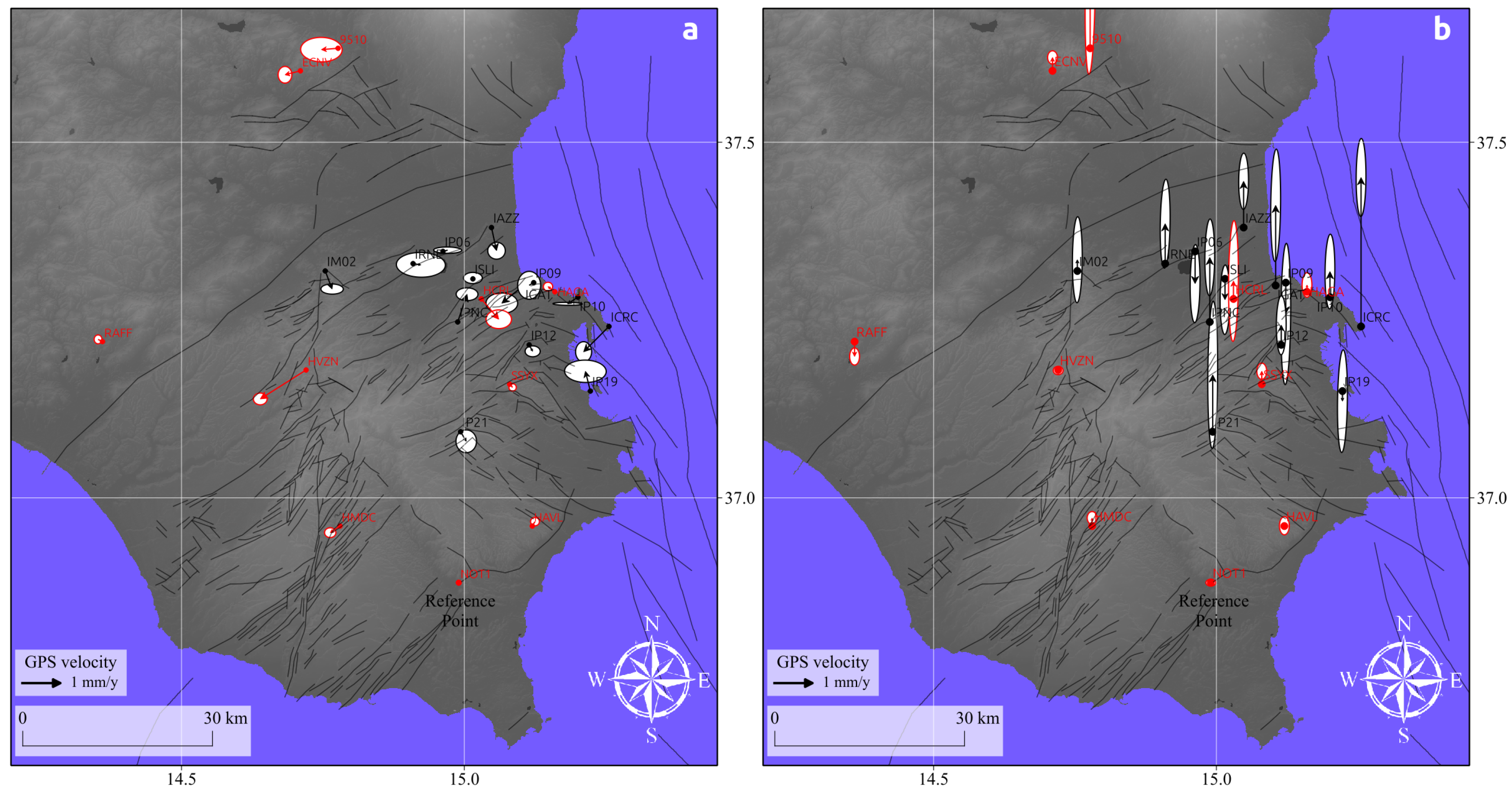
2.2.4. GPS Data
2.2.5. SISTEM Integration
3. Results & Discussion
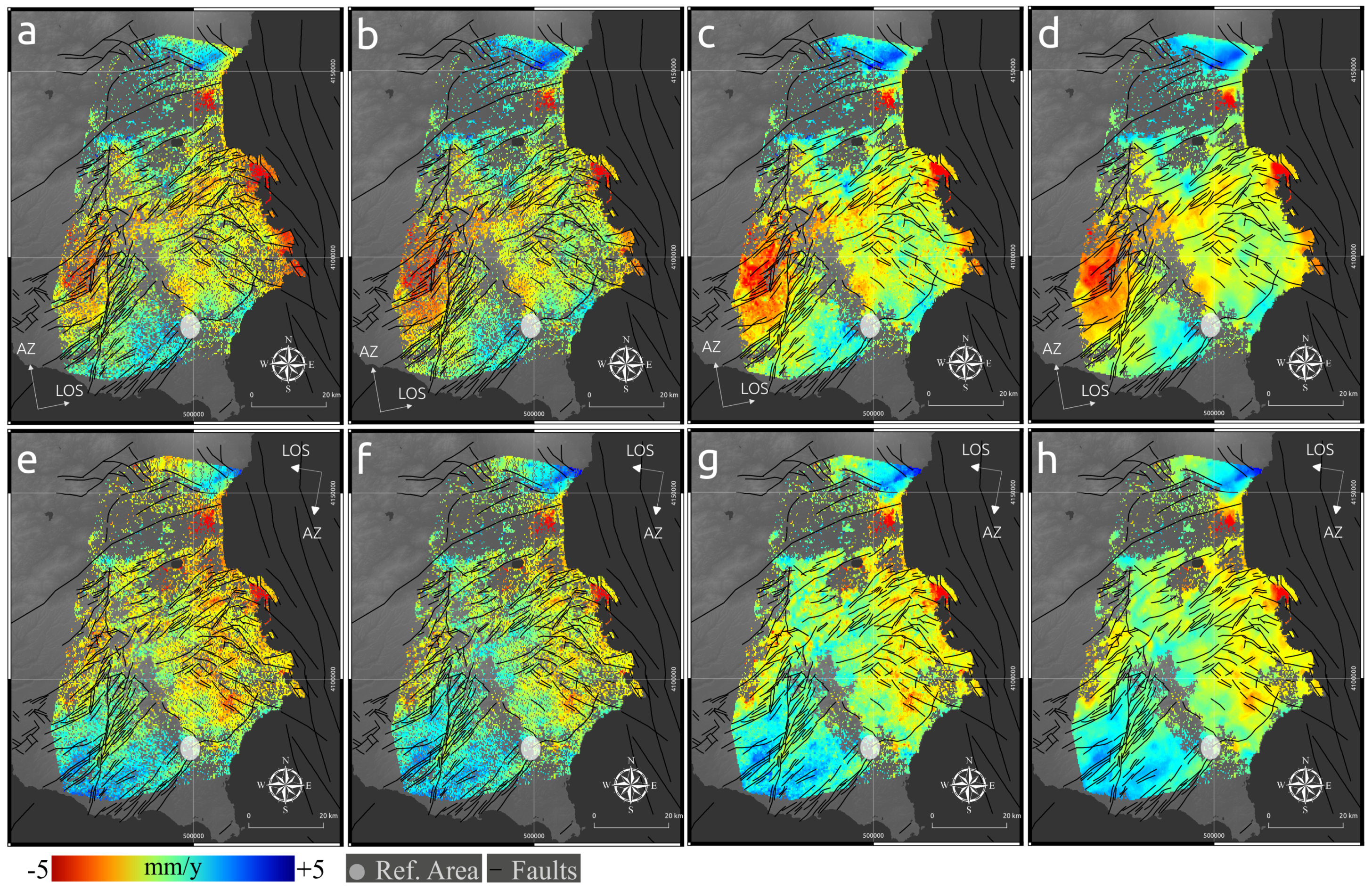
3.1. Tropospheric Correction
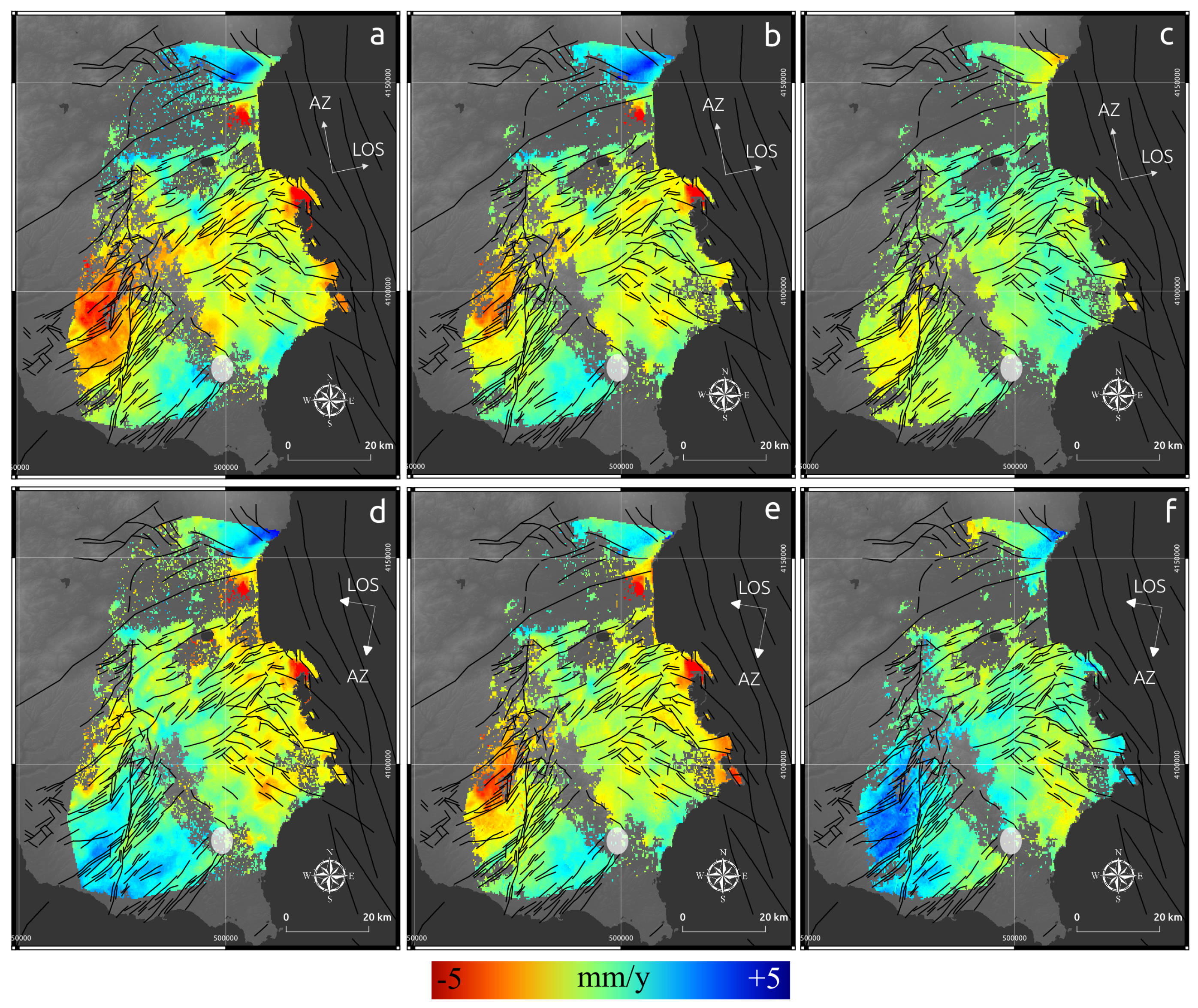
3.2. Spatial Enhancement
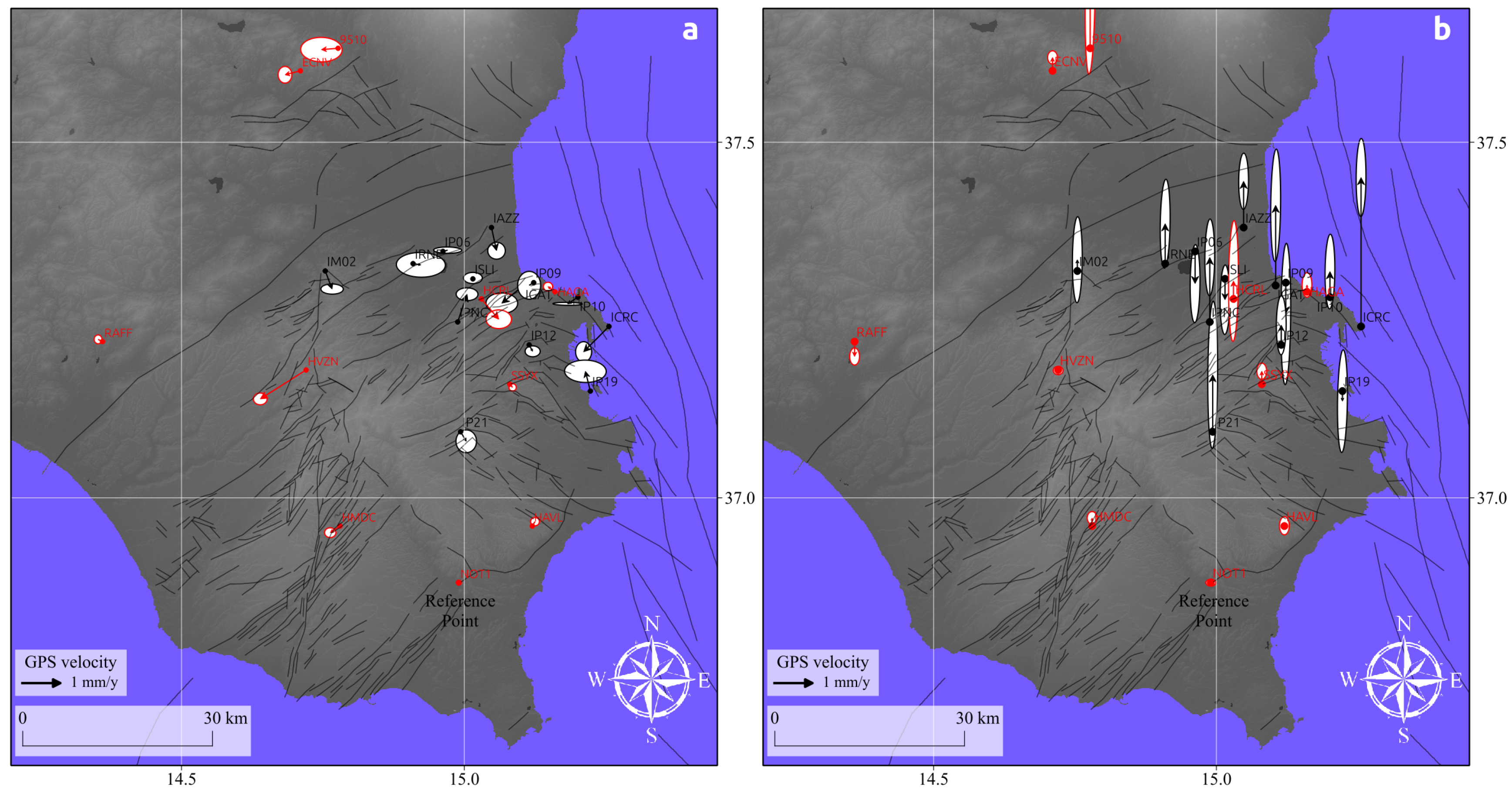
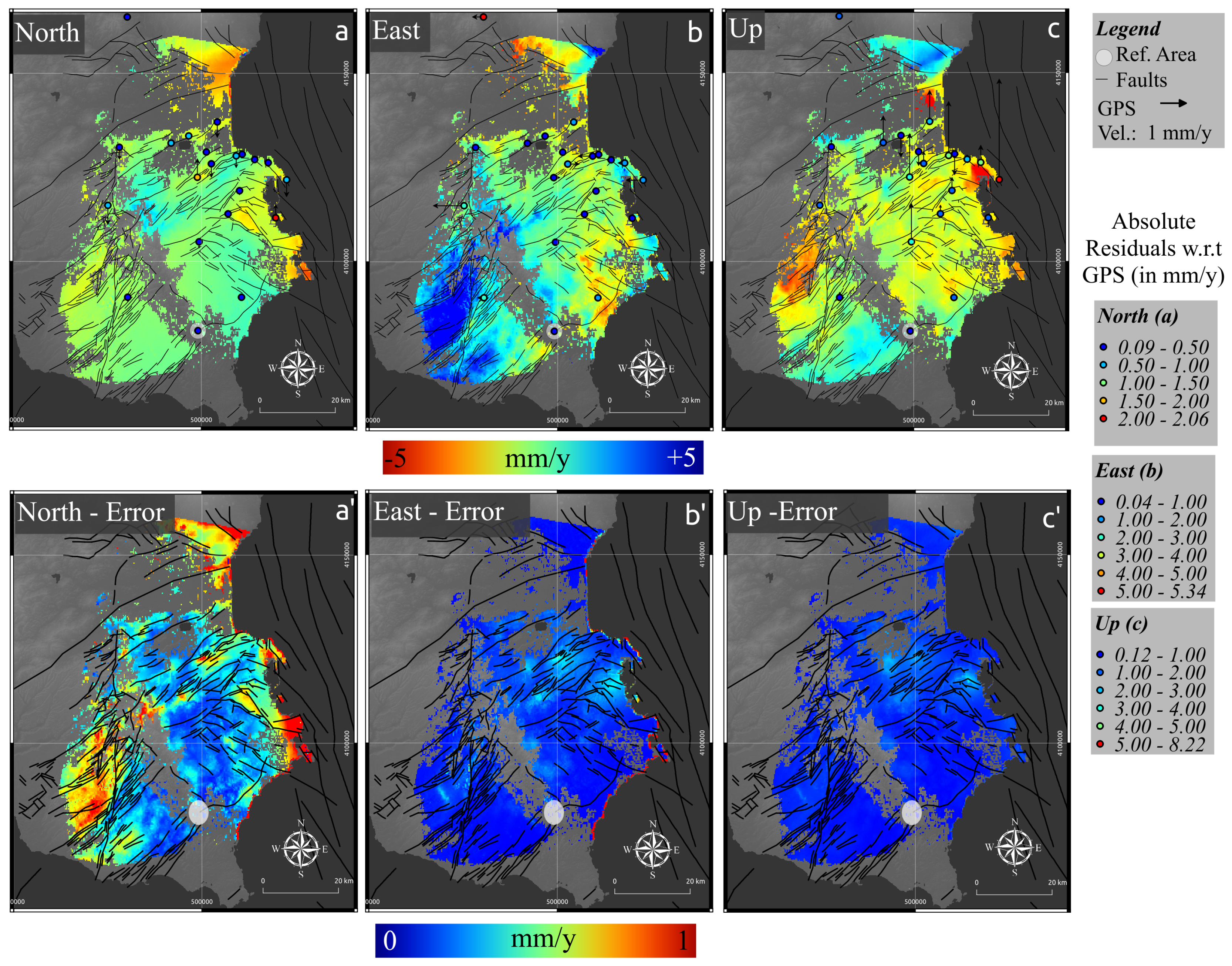
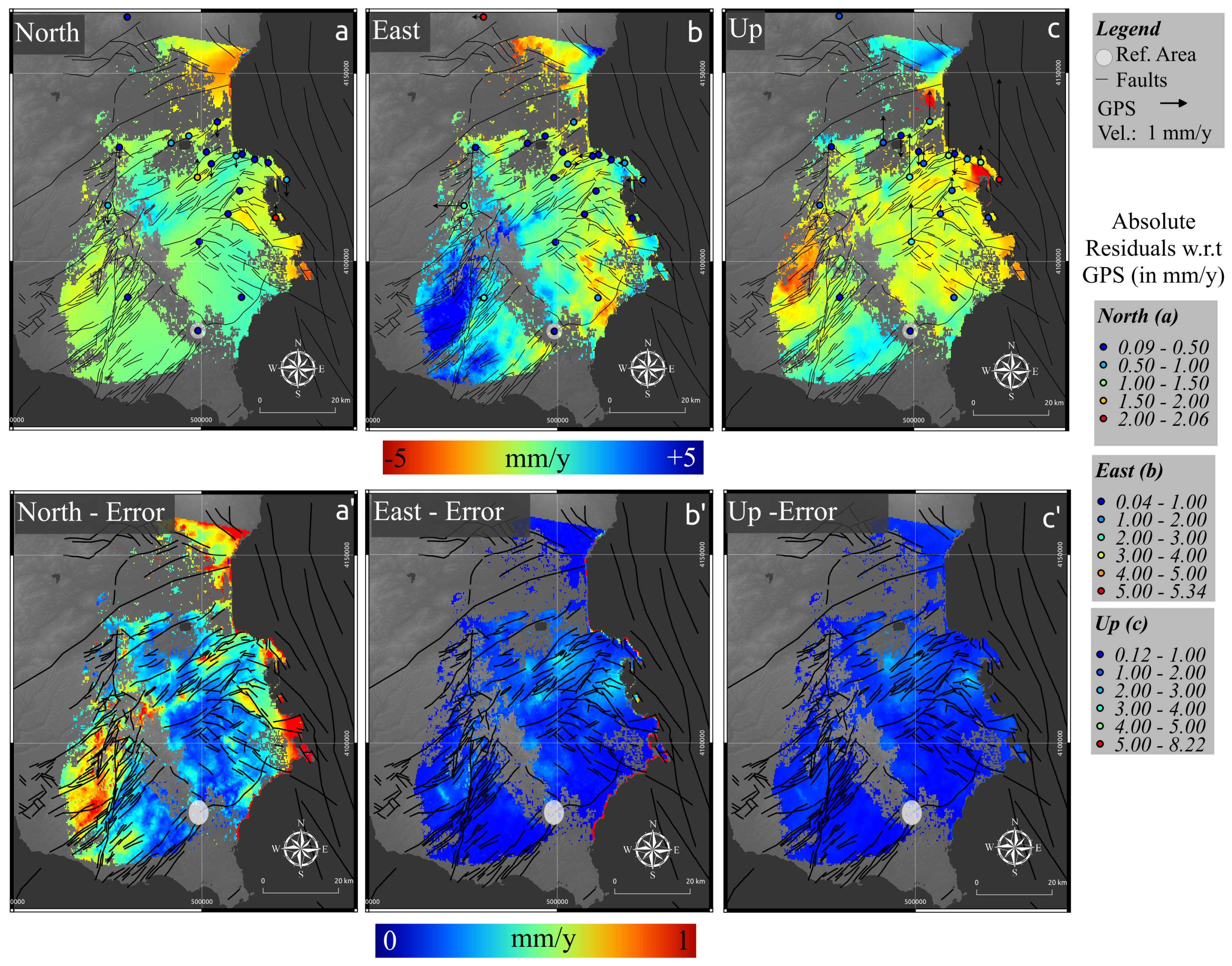
3.3. SISTEM Decomposition
3.3.1. Vertical Component
3.3.2. Horizontal Components
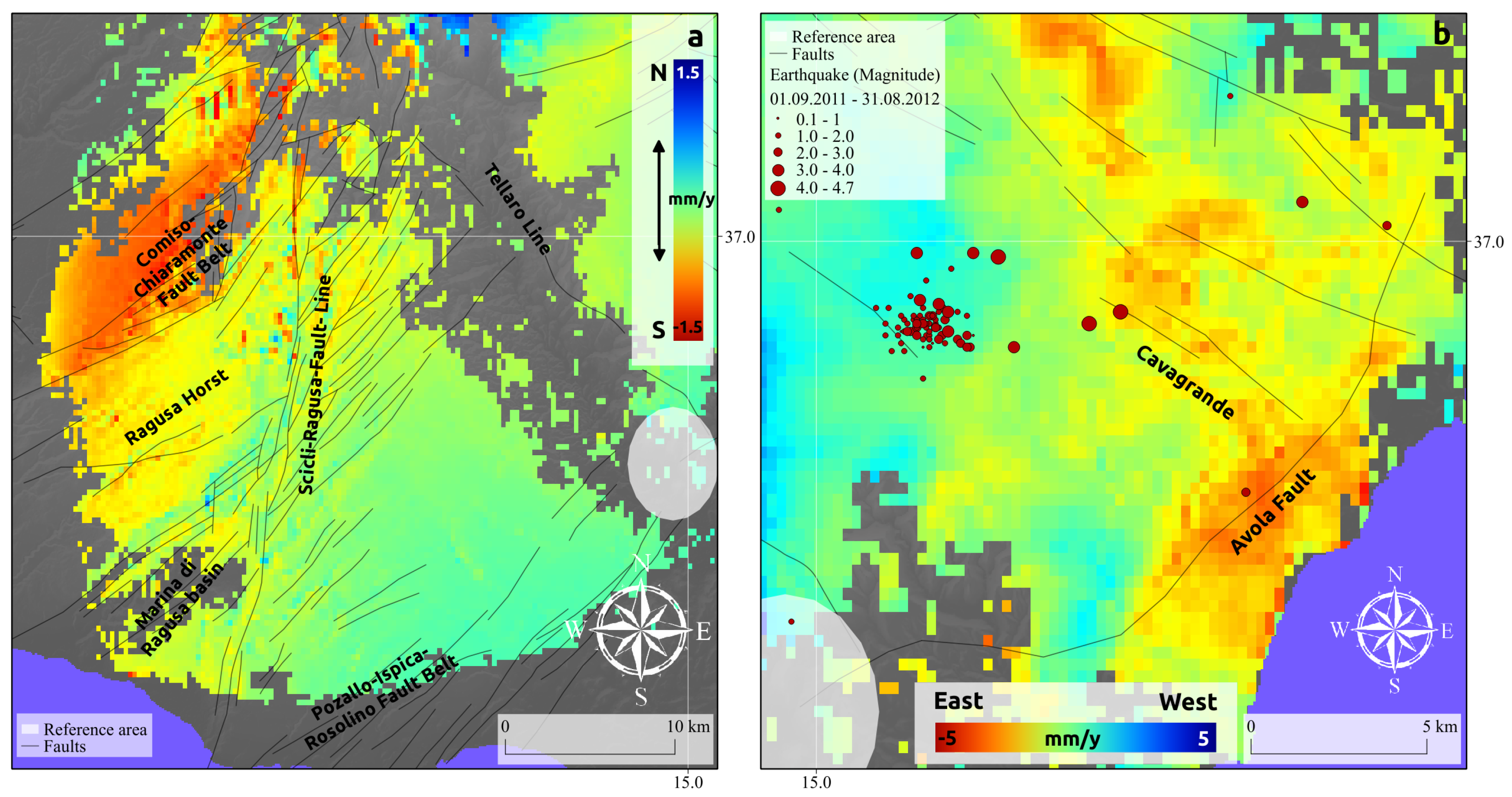
3.4. The Velocity Field in Its Geological Context
3.4.1. Northern Rim of the Hyblean Plateau
3.4.2. Scicli-Ragusa Fault Belt
3.4.3. Ionian Boundary of the Hyblean Plateau
3.4.4. The Presence of Subsidence
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Salvi, S.; Stramondo, S.; Funning, G.J.; Ferretti, A.; Sarti, F.; Mouratidis, A. The Sentinel-1 mission for the improvement of the scientific understanding and the operational monitoring of the seismic cycle. Remote Sens. Environ. 2012, 120, 164–174. [Google Scholar] [CrossRef]
- Hooper, A.; Bekaert, D.; Spaans, K.; Arikan, M. Recent advances in SAR interferometry time series analysis for measuring crustal deformation. Tectonophysics 2012, 514–517, 1–13. [Google Scholar] [CrossRef]
- Zebker, H.A.; Rosen, P.A.; Hensley, S. Atmospheric effects in interferometric synthetic aperture radar surface deformation and topographic maps. J. Geophys. Res. 1997, 102, 7547–7563. [Google Scholar] [CrossRef]
- Kampes, B.M. Radar Interferometry: Persistent Scatterer Technique; Springer: Heidelberg, Germany, 2006. [Google Scholar]
- Hooper, A.; Zebker, H.A.; Segall, P.; Kampes, B. A new method for measuring deformation on volcanoes and other natural terrains using InSAR persistent scatterers. Geophys. Res. Lett. 2004, 31, 1–5. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Nonlinear subsidence rate estimation using permanent scatterers in differential SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2202–2212. [Google Scholar] [CrossRef]
- Hooper, A. A multi-temporal InSAR method incorporating both persistent scatterer and small baseline approaches. Geophys. Res. Lett. 2008, 35, 1–5. [Google Scholar] [CrossRef]
- Usai, S. A Least Squares Database Approach for SAR Interferometric Data. IEEE Trans.Geosci. Remote Sens. 2003, 41, 753–760. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A New Algorithm for Surface Deformation Monitoring Based on Small Baseline Differential SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Cavalié, O.; Pathier, E.; Radiguet, M.; Vergnolle, M.; Cotte, N.; Walpersdorf, A.; Kostoglodov, V.; Cotton, F. Slow slip event in the Mexican subduction zone: Evidence of shallower slip in the Guerrero seismic gap for the 2006 event revealed by the joint inversion of InSAR and GPS data. Earth Planet. Sci. Lett. 2013, 367, 52–60. [Google Scholar] [CrossRef]
- Samsonov, S.; Tiampo, K.; Rundle, J. Application of DInSAR-GPS optimization for derivation of three-dimensional surface motion of the southern California region along the San Andreas fault. Comput. Geosci. 2008, 34, 503–514. [Google Scholar] [CrossRef]
- Brunori, C.A.; Bignami, C.; Stramondo, S.; Bustos, E. 20 years of active deformation on volcano caldera: Joint analysis of InSAR and AInSAR techniques. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 279–287. [Google Scholar] [CrossRef]
- Currenti, G.; Solaro, G.; Napoli, R.; Pepe, A.; Bonaccorso, A.; Del Negro, C.; Sansosti, E. Modeling of ALOS and COSMO-SkyMed satellite data at Mt Etna: Implications on relation between seismic activation of the Pernicana fault system and volcanic unrest. Remote Sens. Environ. 2012, 125, 64–72. [Google Scholar] [CrossRef]
- Hooper, A.; Segall, P.; Zebker, H.A. Persistent scatterer interferometric synthetic aperture radar for crustal deformation analysis, with application to Volcán Alcedo, Galápagos. J. Geophys. Res. 2007, 112, 1–21. [Google Scholar] [CrossRef]
- Del Ventisette, C.; Ciampalini, A.; Manunta, M.; Calò, F.; Paglia, L.; Ardizzone, F.; Mondini, A.C.; Reichenbach, P.; Mateos, R.M.; Bianchini, S.; et al. Exploitation of Large Archives of ERS and ENVISAT C-Band SAR Data to Characterize Ground Deformations. Remote Sens. 2013, 5, 3896–3917. [Google Scholar] [CrossRef]
- Jones, C.; An, K.; Blom, R.; Kent, J.D.; Ivins, E.; Bekaert, D. Anthropogenic and geologic influences on subsidence in the vicinity of New Orleans, Louisiana. J. Geophys. Res. Solid Earth 2016, 121, 3867–3887. [Google Scholar] [CrossRef]
- Bonano, M.; Manunta, M.; Pepe, A.; Paglia, L.; Lanari, R. From Previous C-Band to New X-Band SAR Systems: Assessment of the DInSAR Mapping Improvement for Deformation Time-Series Retrieval in Urban Areas. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1973–1984. [Google Scholar] [CrossRef]
- Ketelaar, V. Satellite Radar Interferometry Subsidence Monitoring Techniques; Springer: Assen, The Netherlands, 2009. [Google Scholar]
- Adam, N.; Parizzi, A.; Eineder, M.; Crosetto, M. Practical persistent scatterer processing validation in the course of the Terrafirma project. J. Appl. Geophys. 2009, 69, 59–65. [Google Scholar] [CrossRef]
- Stramondo, S.; Bozzano, F.; Marra, F.; Wegmuller, U.; Cinti, F.R.; Moro, M.; Saroli, M. Subsidence induced by urbanisation in the city of Rome detected by advanced InSAR technique and geotechnical investigations. Remote Sens. Environ. 2008, 112, 3160–3172. [Google Scholar] [CrossRef]
- Casu, F.; Manzo, M.; Lanari, R. A quantitative assessment of the SBAS algorithm performance for surface deformation retrieval from DInSAR data. Remote Sens. Environ. 2006, 102, 195–210. [Google Scholar] [CrossRef]
- Ferretti, A.; Savio, G.; Barzaghi, R.; Borghi, A.; Musazzi, S.; Novali, F.; Prati, C.; Rocca, F. Submillimeter Accuracy of InSAR Time Series: Experimental Validation. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1142–1153. [Google Scholar] [CrossRef]
- Argnani, A.; Armigliato, A.; Pagnoni, G.; Zaniboni, F.; Tinti, S.; Bonazzi, C. Active tectonics along the submarine slope of south-eastern Sicily and the source of the 11 January 1693 earthquake and tsunami. Nat. Hazards Earth Syst. Sci. 2012, 12, 1311–1319. [Google Scholar] [CrossRef]
- Di Maggio, C.; Madonia, G.; Parise, M.; Vattano, M. Karst of Sicily and its conservation. J. Cave Karst Stud. 2012, 74, 157–172. [Google Scholar] [CrossRef]
- Canova, F.; Tolomei, C.; Salvi, S.; Toscani, G.; Seno, S. Land subsidence along the Ionian coast of SE Sicily (Italy), detection and analysis via Small Baseline Subset (SBAS) multitemporal differential SAR interferometry. Earth Surf. Process. Landf. 2012, 286, 273–286. [Google Scholar] [CrossRef]
- Hobiger, T.; Kinoshita, Y.; Shimizu, S.; Ichikawa, R.; Furuya, M.; Kondo, T.; Koyama, Y. On the importance of accurately ray-traced troposphere corrections for Interferometric SAR data. J. Geod. 2010, 84, 537–546. [Google Scholar] [CrossRef]
- Doin, M.P.; Lasserre, C.; Peltzer, G.; Cavalié, O.; Doubre, C. Corrections of stratified tropospheric delays in SAR interferometry: Validation with global atmospheric models. J. Appl. Geophys. 2009, 69, 35–50. [Google Scholar] [CrossRef]
- Hanssen, R.F. Radar Interferometry: Data Interpretation and Error Analysis; Kluwer Academic Publishers: New York, NY, USA, 2001. [Google Scholar]
- Bekaert, D.; Hooper, A.; Wright, T. A spatially variable power law tropospheric correction technique for InSAR data. J. Geophys. Res. Solid Earth 2015, 120, 1345–1356. [Google Scholar] [CrossRef]
- Lin, Y.N.; Simons, M.; Hetland, E.A.; Muse, P.; DiCaprio, C. A multiscale approach to estimating topographically correlated propagation delays in radar interferograms. Geochem. Geophys. Geosyst. 2010, 11, Q09002. [Google Scholar] [CrossRef]
- Li, Z.; Fielding, E.; Cross, P.; Muller, J. Interferometric synthetic aperture radar atmospheric correction: GPS topography-dependent turbulence model. J. Geophys. Res. 2010, 111, 1–12. [Google Scholar] [CrossRef]
- Williams, S.; Bock, Y.; Fang, P.; Cecil, H. Integrated satellite interferometry’ Tropospheric noise, GPS estimates and implications for interferometric synthetic aperture radar products. J. Geophys. Res. Solid Earth 1998, 103, 27051–27067. [Google Scholar] [CrossRef]
- Li, Z.; Fielding, E.; Cross, P.; Muller, J.P. Interferometric synthetic aperture radar atmospheric correction: Medium Resolution Imaging Spectrometer and Advanced Synthetic Aperture Radar integration. Geophys. Res. Lett. 2006, 33, 4–7. [Google Scholar] [CrossRef]
- Jolivet, R.; Grandin, R.; Lasserre, C.; Doin, M.P.; Peltzer, G. Systematic InSAR tropospheric phase delay corrections from global meteorological reanalysis data. Geophys. Res. Lett. 2011, 38, 1–6. [Google Scholar] [CrossRef]
- Nico, G.; Tome, R.; Catalão, J.; Miranda, P.M.A. On the Use of the WRF Model to Mitigate Tropospheric Phase Delay Effects in SAR Interferograms. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4970–4976. [Google Scholar] [CrossRef]
- Li, Z.; Fielding, E.; Cross, P.; Preusker, R. Advanced InSAR atmospheric correction: MERIS/MODIS combination and stacked water vapour models. Int. J. Remote Sens. 2009, 30, 3343–3363. [Google Scholar] [CrossRef]
- Bonforte, A.; Ferretti, A.; Prati, C.; Puglisi, G.; Rocca, F. Calibration of atmospheric effects on SAR interferograms by GPS and local atmosphere models: First results. J. Atmos. Sol. Terr. Phys. 2002, 63, 1343–1357. [Google Scholar] [CrossRef]
- Mateus, P.; Nico, G.; Tome, R.; Catalão, J.; Miranda, P.M.A. Experimental Study on the Atmospheric Delay Based on GPS, SAR Interferometry, and Numerical Weather Model Data. IEEE Trans. Geosci. Remote Sens. 2013, 51, 6–11. [Google Scholar] [CrossRef]
- Bekaert, D.; Walters, R.; Wright, T.; Hooper, A.; Parker, D. Statistical comparison of InSAR tropospheric correction techniques. Remote Sens. Environ. 2015, 170, 40–47. [Google Scholar] [CrossRef]
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.A.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Q. J. R. Meteorol. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- Walters, R.J.; Parsons, B.; Wright, T.J. Constraining crustal velocity fields with InSAR for Eastern Turkey: Limits to the block-like behavior of eastern Anatolia. J. Geophys. Res. Solid Earth 2014, 119, 5215–5234. [Google Scholar] [CrossRef]
- Perissin, D.; Rocca, F.; Pierdicca, M.; Pichelli, E.; Cimini, D.; Venuti, G.; Rommen, B. Mitigation of athmospheric delay in INSAR: The ESA Metawave Project. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 2558–2561.
- Hu, J.; Li, Z.; Ding, X.; Zhu, J.; Zhang, L.; Sun, Q. Resolving three-dimensional surface displacements from InSAR measurements: A review. Earth-Sci. Rev. 2014, 133, 1–17. [Google Scholar] [CrossRef]
- Atzori, S.; Salvi, S. SAR Data Analysis in Solid Earth Geophysics: From Science to Risk Management. In Land Applications of Radar Remote Sensing; Closson, D., Ed.; InTech: Rijeka, Croatia, 2014; pp. 2–43. [Google Scholar]
- Ng, A.H.M.; Chang, H.C.; Zhang, K.; Ge, L.; Rizos, C.; Omura, M. Deformation mapping in three dimensions for underground mining using InSAR—Southern highland coal field in New South Wales, Australia. Int. J. Remote Sens. 2011, 32, 7227–7256. [Google Scholar] [CrossRef]
- Michel, R.; Avouac, J.P. Measuring ground displacement from SAR amplitude images: Application to the Landers earthquake. Geophys. Res. Lett. 1999, 26, 875–878. [Google Scholar] [CrossRef]
- Bechor, N.B.D.; Zebker, H.A. Measuring two-dimensional movements using a single InSAR pair. Geophys. Res. Lett. 2006, 33, 1–5. [Google Scholar] [CrossRef]
- Scheiber, R.; Moreira, A. Coregistration of Interferometric SAR Images Using Spectral Diversity. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2179–2191. [Google Scholar] [CrossRef]
- Fielding, E.J.; Lundgren, P.R.; Taymaz, T.; Yolsal-Cevikbilen, S.; Owen, S.E. Fault-Slip Source Models for the 2011 M 7.1 Van Earthquake in Turkey from SAR Interferometry, Pixel Offset Tracking, GPS, and Seismic Waveform Analysis. Seismol. Res. Lett. 2013, 84, 579–593. [Google Scholar] [CrossRef]
- Jung, H.S.; Lu, Z.; Won, J.S.; Poland, M.P.; Miklius, A. Mapping three-dimensional surface deformation by combining multiple-aperture interferometry and conventional interferometry: Application to the June 2007 eruption of kilauea volcano, Hawaii. IEEE Geosci. Remote Sens. Lett. 2011, 8, 34–38. [Google Scholar] [CrossRef]
- Fialko, Y.; Simons, M.; Agnew, D. The complete (3-D) surface displacement field in the epicentral area of the 1999 Mw 7.1 Hector Mine earthquake, California, from space geodetic observations. Geophys. Res. Lett. 2001, 28, 3063–3066. [Google Scholar] [CrossRef]
- Bally, P. Satellite Earth Observation for Geohazard Risk Mangement; Technical Report; European Space Agency: Santorini, Greece, 2012. [Google Scholar]
- Gudmundsson, S. Three-dimensional surface motion maps estimated from combined interferometric synthetic aperture radar and GPS data. J. Geophys. Res. 2002, 107, 1–14. [Google Scholar] [CrossRef]
- Knospe, S.; Jónsson, S. Covariance estimation for DInSAR surface-deformation measurements in presence of anisotropic atmospheric noise. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2057–2065. [Google Scholar] [CrossRef]
- Catalao, J.; Nico, G.; Hanssen, R.; Catita, C. Merging GPS and Atmospherically Corrected InSAR Data to Map 3-D Terrain Displacement Velocity. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2354–2360. [Google Scholar] [CrossRef]
- Wang, H.; Wright, T.J. Satellite geodetic imaging reveals internal deformation of western Tibet. Geophys. Res. Lett. 2012, 39, 1–5. [Google Scholar] [CrossRef]
- England, P.; Molnar, P. Late Quaternary to decadal velocity fields in Asia. J. Geophys. Res. Solid Earth 2005, 110, 1–27. [Google Scholar] [CrossRef]
- Guglielmino, F.; Nunnari, G.; Puglisi, G.; Spata, A. Simultaneous and Integrated Strain Tensor Estimation From Geodetic and Satellite Deformation Measurements to Obtain Three-Dimensional Displacement Maps. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1815–1826. [Google Scholar] [CrossRef]
- Segall, P. Earthquake and Volcano Deformation; Princeton University Press: Princeton, NJ, USA, 2010; pp. 1–432. [Google Scholar]
- Bouwer, H. Land Subsidence and Cracking Due to Ground-Water Depletion. Ground Water 1977, 15, 358–364. [Google Scholar] [CrossRef]
- Guglielmino, F.; Bignami, C.; Bonforte, A.; Briole, P.; Obrizzo, F.; Puglisi, G.; Stramondo, S.; Wegmüller, U. Analysis of satellite and in situ ground deformation data integrated by the SISTEM approach: The April 3, 2010 earthquake along the Pernicana fault (Mt. Etna—Italy) case stud. Earth Planet. Sci. Lett. 2011, 312, 327–336. [Google Scholar] [CrossRef]
- Guglielmino, F.; Anzidei, M.; Briole, P.; Elias, P.; Puglisi, G. 3D displacement maps of the 2009 L’Aquila earthquake (Italy) by applying the SISTEM method to GPS and DInSAR data. Terra Nova 2013, 25, 79–85. [Google Scholar] [CrossRef]
- Teza, G.; Pesci, A.; Galgaro, A. Grid _ strain and grid _ strain3: Software packages for strain field computation in 2D and 3D environments. Comput. Geosci. 2008, 34, 1142–1153. [Google Scholar] [CrossRef]
- Shen, Z.K.; Jackson, D.D.; Ge, B.X. Crustal deformation across and beyond the Los Angeles basin from geodetic measurements. J. Geophys. Res. 1996, 101, 27957–27980. [Google Scholar] [CrossRef]
- Angelica, C.; Bonforte, A.; Distefano, G.; Serpelloni, E.; Gresta, S. Seismic potential in Italy from integration and comparison of seismic and geodetic strain rates. Tectonophysics 2013, 608, 996–1006. [Google Scholar] [CrossRef]
- Scarfi, L.; Messina, A.; Cassisi, C. Sicily and southern Calabria focal mechanism database: A valuable tool for local and regional stress-field determination. Ann. Geophys. 2013, 56, D0109. [Google Scholar]
- Ben-Avraham, Z.; Grasso, M. Crustal structure variations and transcurrent faulting at the eastern and western margins of the eastern Mediterranean. Tectonophysics 1991, 196, 269–277. [Google Scholar] [CrossRef]
- Rovida, A.; Camassi, R.; Gasperini, P.; Stucchi, M. CPTI11, the 2011 Version of the Parametric Catalogue of Italian Earthquakes; Istituto Nazionale di Geofisica e Vulcanologia: Milano, Italy, 2011. [Google Scholar]
- ISIDe. Italian Seismological, Instrumental and Parametric Database, 2016. Available online: http://iside.rm.ingv.it/iside/standard/?lang=en (accessed on 27 Dcember 2016).
- Bonforte, A.; Catalano, S.; Maniscalco, R.; Pavano, F.; Romagnoli, G.; Sturiale, G.; Tortorici, G. Geological and geodetic constraints on the active deformation along the northern margin of the Hyblean Plateau (SE Sicily). Tectonophysics 2014, 640–641, 80–89. [Google Scholar] [CrossRef]
- Mastrolembo Ventura, B.; Serpelloni, E.; Argnani, A.; Bonforte, A.; Bürgmann, R.; Anzidei, M.; Baldi, P.; Puglisi, G. Fast geodetic strain-rates in eastern Sicily (southern Italy): New insights into block tectonics and seismic potential in the area of the great 1693 earthquake. Earth Planet. Sci. Lett. 2014, 404, 77–88. [Google Scholar] [CrossRef]
- Bousquet, J.; Lanzafame, G. Compression and Quaternary tectonic inversion onthe Northern edge of the Hyblean Mountains, foreland of the Appenine–Maghrebian chain in Eastern Sicily (Italy). GeoActa 2004, 3, 165–177. [Google Scholar]
- Di Bucci, D.; Burrato, P.; Vannoli, P.; Valensise, G. Tectonic evidence for the ongoing Africa-Eurasia convergence in central Mediterranean foreland areas: A journey among long-lived shear zones, large earthquakes, and elusive fault motions. J. Geophys. Res. 2010, 115, B12404. [Google Scholar] [CrossRef]
- Visini, F.; de Nardis, R.; Barbano, M.S.; Lavecchia, G. Testing the seismogenic sources of the January 11th 1693 Sicilian earthquake (Io X/XI): Insights from macroseismic field simulations. Ital. J. Geosci. 2009, 128, 147–156. [Google Scholar]
- Brancato, A.; Hole, J.A.; Gresta, S.; Beale, J.N. Determination of Seismogenic Structures in Southeastern Sicily (Italy) by High-Precision Relative Relocation of Microearthquakes. Bull. Seismol. Soc. Am. 2009, 99, 1921–1936. [Google Scholar] [CrossRef]
- Amato, A.; Azzara, R.; Basili, A.; Chiarabba, C.; Cocco, M.; Bona, M.D.; Selvaggi, G. Mainshock and aftershocks of the December 13, 1990, eastern Sicily earthquake. Ann. Geofis. 1995, 18, 255–266. [Google Scholar]
- Working Group MPS. Redazione Della Mappa di Pericolosità Sismica Prevista Dall’Ordinanza PCMdel 20 Marzo 2003; Rapporto Conclusivo per il Dipartimento Della Protezione Civile; INGV: Milano, Italy, 2004. [Google Scholar]
- Musumeci, C.; Patane, D.; Scarfi, L.; Gresta, S. Stress Directions and Shear-Wave Anisotropy: Observations from Local Earthquakes in Southeastern Sicily, Italy. Bull. Seismol. Soc. Am. 2005, 95, 1359–1374. [Google Scholar] [CrossRef]
- Rosen, P.A.; Henley, S.; Peltzer, G.; Simons, M. Updated Repeat Orbit Interferometry Package Released. EOS Trans. AGU 2004, 85, 47. [Google Scholar] [CrossRef]
- Kampes, B.M.; Hanssen, R.F.; Perski, Z. Radar interferometry with public domain tools. In Proceedings of the FRINGE 2003, Frascati, Italy, 1–5 December 2003; Volume 2003, pp. 6–11.
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The Shuttle Radar Topography Mission. Rev. Geophys. 2007, 45, 1–33. [Google Scholar] [CrossRef]
- Hooper, A.J. Stanford Model for Persistent Scatterer Interferometry (StaMPS). Available online: https://homepages.see.leeds.ac.uk/earahoo/stamps/ (accessed on 27 December 2016).
- Marinkovic, P.; Larsen, Y. Consequences of Long-Term ASAR Local Oscillator Frequency Decay—An Empirical Study of 10 Years of Data. In Proceedings of the European Space Agency Living Planet Symposium, Edinburgh, UK, 9–13 September 2013.
- Bekaert, D. Toolbox for Reducing Atmospheric InSAR Noise (TRAIN). Available online: http://www.davidbekaert.com (accessed on 27 Dcember 2016).
- Selige, T.; Böhner, J.; Ringeler, A. Processing of SRTM X-SAR data to correct interferometric elevation models for land surface process applications. Göttinger Geogr. Abh. 2003, 115, 97–104. [Google Scholar]
- Lee, J.; Papathanassiou, K.; Ainsworth, T.; Grunes, M.; Reigber, A. A new technique for noise filtering of SAR interferometric phase images. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1456–1465. [Google Scholar]
- Bonforte, A. Study of the Northeastern Sector of the Hyblean Plateau and of the Eastern Flank of Mt, Etna by GPS Spatial Techniques. Ph.D. Thesis, Univerita degli Studi di Catania, Catania, Italy, 2002. [Google Scholar]
- Musumeci, C.; Scarfì, L.; Palano, M.; Patanè, D. Foreland segmentation along an active convergent margin: New constraints in southeastern Sicily (Italy) from seismic and geodetic observations. Tectonophysics 2014, 630, 137–149. [Google Scholar] [CrossRef]
- Catalano, S.; De Guidi, G.; Lanzafame, G.; Monaco, C.; Torrisi, S.; Sturiale, G.; Tortorici, G.; Tortorici, L. Inversione tettonica positiva tardo-quaternaria nel Plateau Ibleo (Sicilia SE). Rend. Soc. Geol. It. 2006, 2, 118–120. [Google Scholar]
- Catalano, S.; Torrisi, S.; Tortorici, G.; Romagnoli, G. Active folding along a rift-flank: The Catania region case history (SE Sicily). J. Geodyn. 2011, 51, 53–63. [Google Scholar] [CrossRef]
- Bonforte, A.; Guglielmino, F.; Coltelli, M.; Ferretti, A.; Puglisi, G. Structural assessment of mount Etna volcano from permanent scatterers analysis. Geochem. Geophys. Geosyst. 2011, 12. [Google Scholar] [CrossRef]
- Borgia, A.; Lanari, R.; Sansosti, E.; Tesauro, M.; Berardino, P.; Fornaro, G.; Neri, M.; Murray, J.B. Actively growing anticlines beneath Catania from the distal motion of Mount Etna’s Decollement measured by SAR interferometry and GPS. Geophys. Res. Lett. 2000, 27, 3409–3412. [Google Scholar] [CrossRef]
- Lundgren, P.; Casu, F.; Manzo, M.; Pepe, A.; Berardino, P.; Sansosti, E.; Lanari, R. Gravity and magma induced spreading of Mount Etna volcano revealed by satellite radar interferometry. Geophys. Res. Lett. 2004, 31, 1–4. [Google Scholar] [CrossRef]
- Ben-Avraham, Z.; Grasso, M. Collision zone segmentation in Sicily and adjacent area (central Mediterranean). Ann. Tecton. 1990, 5, 131–139. [Google Scholar]
- Serpelloni, E.; Vannucci, G.; Pondrelli, S.; Argnani, A.; Casula, G.; Anzidei, M.; Baldi, P.; Gasperini, P. Kinematics of the Western Africa-Eurasia plate boundary from focal mechanisms and GPS data. Geophys. J. Int. 2007, 169, 1180–1200. [Google Scholar] [CrossRef]
- Catalano, S.; De Guidi, G.; Monaco, C.; Tortorici, G.; Tortorici, L. Active faulting and seismicity along the Siculo-Calabrian Rift Zone (Southern Italy). Tectonophysics 2008, 453, 177–192. [Google Scholar] [CrossRef]
- Bianca, M.; Monaco, C.; Tortorici, L.; Cernobori, L. Quaternary normal faulting in southeastern Sicily (Italy): A seismic source for the 1693 large earthquake. Geophys. J. Int. 1999, 139, 370–394. [Google Scholar] [CrossRef]
- Cultrera, F.; Barreca, G.; Scarfì, L.; Monaco, C. Fault reactivation by stress pattern reorganization in the Hyblean foreland domain of SE Sicily (Italy) and seismotectonic implications. Tectonophysics 2015, 661, 215–228. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean LOS vs. GPS (RMSE) | Mean RMSE of all IFGs | |
|---|---|---|
| non-corrected Stack (Ascending) | 3.4 mm/year | 3.9 rad |
| Tropos. corrected stack (Ascending) | 2.8 mm/year | 3.5 rad |
| Percentual Improvement | 17.6% | 10% |
| non-corrected Stack (Descending) | 3.3 mm/year | 4.2 rad |
| Tropos. corrected stack (Descending) | 2.8 mm/year | 3.8 rad |
| Percentual Improvement | 15% | 9.5% |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vollrath, A.; Zucca, F.; Bekaert, D.; Bonforte, A.; Guglielmino, F.; Hooper, A.J.; Stramondo, S. Decomposing DInSAR Time-Series into 3-D in Combination with GPS in the Case of Low Strain Rates: An Application to the Hyblean Plateau, Sicily, Italy. Remote Sens. 2017, 9, 33. https://doi.org/10.3390/rs9010033
Vollrath A, Zucca F, Bekaert D, Bonforte A, Guglielmino F, Hooper AJ, Stramondo S. Decomposing DInSAR Time-Series into 3-D in Combination with GPS in the Case of Low Strain Rates: An Application to the Hyblean Plateau, Sicily, Italy. Remote Sensing. 2017; 9(1):33. https://doi.org/10.3390/rs9010033
Chicago/Turabian StyleVollrath, Andreas, Francesco Zucca, David Bekaert, Alessandro Bonforte, Francesco Guglielmino, Andrew J. Hooper, and Salvatore Stramondo. 2017. "Decomposing DInSAR Time-Series into 3-D in Combination with GPS in the Case of Low Strain Rates: An Application to the Hyblean Plateau, Sicily, Italy" Remote Sensing 9, no. 1: 33. https://doi.org/10.3390/rs9010033
APA StyleVollrath, A., Zucca, F., Bekaert, D., Bonforte, A., Guglielmino, F., Hooper, A. J., & Stramondo, S. (2017). Decomposing DInSAR Time-Series into 3-D in Combination with GPS in the Case of Low Strain Rates: An Application to the Hyblean Plateau, Sicily, Italy. Remote Sensing, 9(1), 33. https://doi.org/10.3390/rs9010033