
Wake Component Detection in X-Band SAR Images for Ship Heading and Velocity Estimation


Abstract
:
1. Introduction
2. Wake-Based Method for Ship Heading and Velocity Estimation
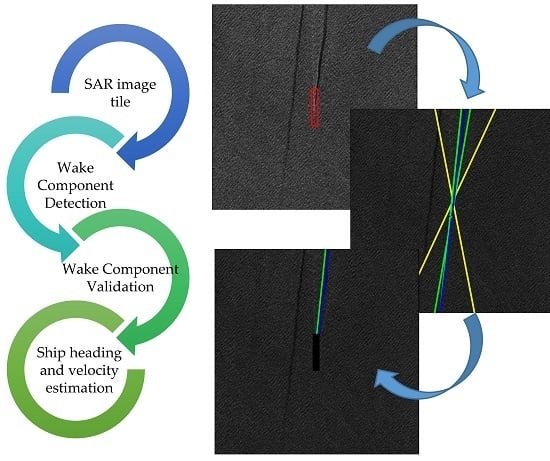
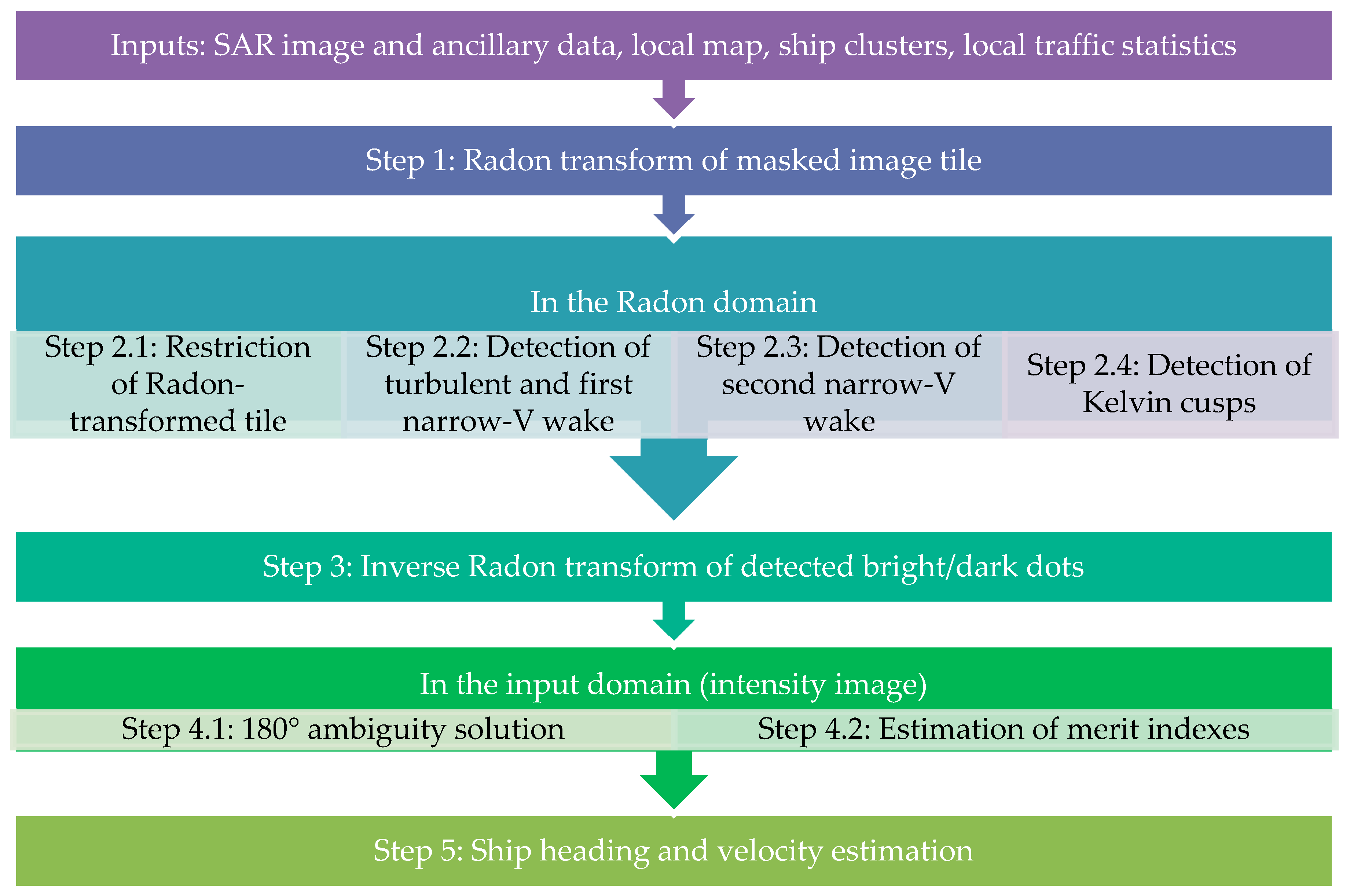
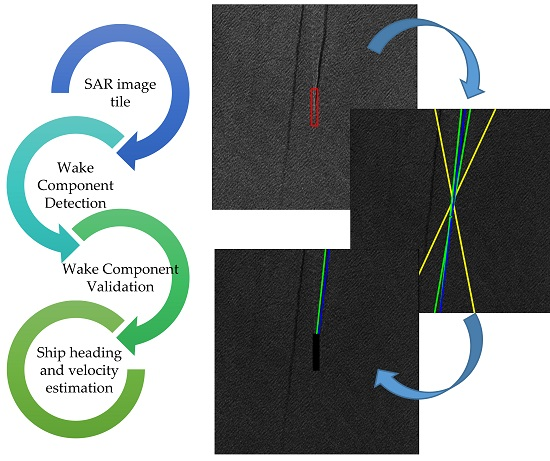
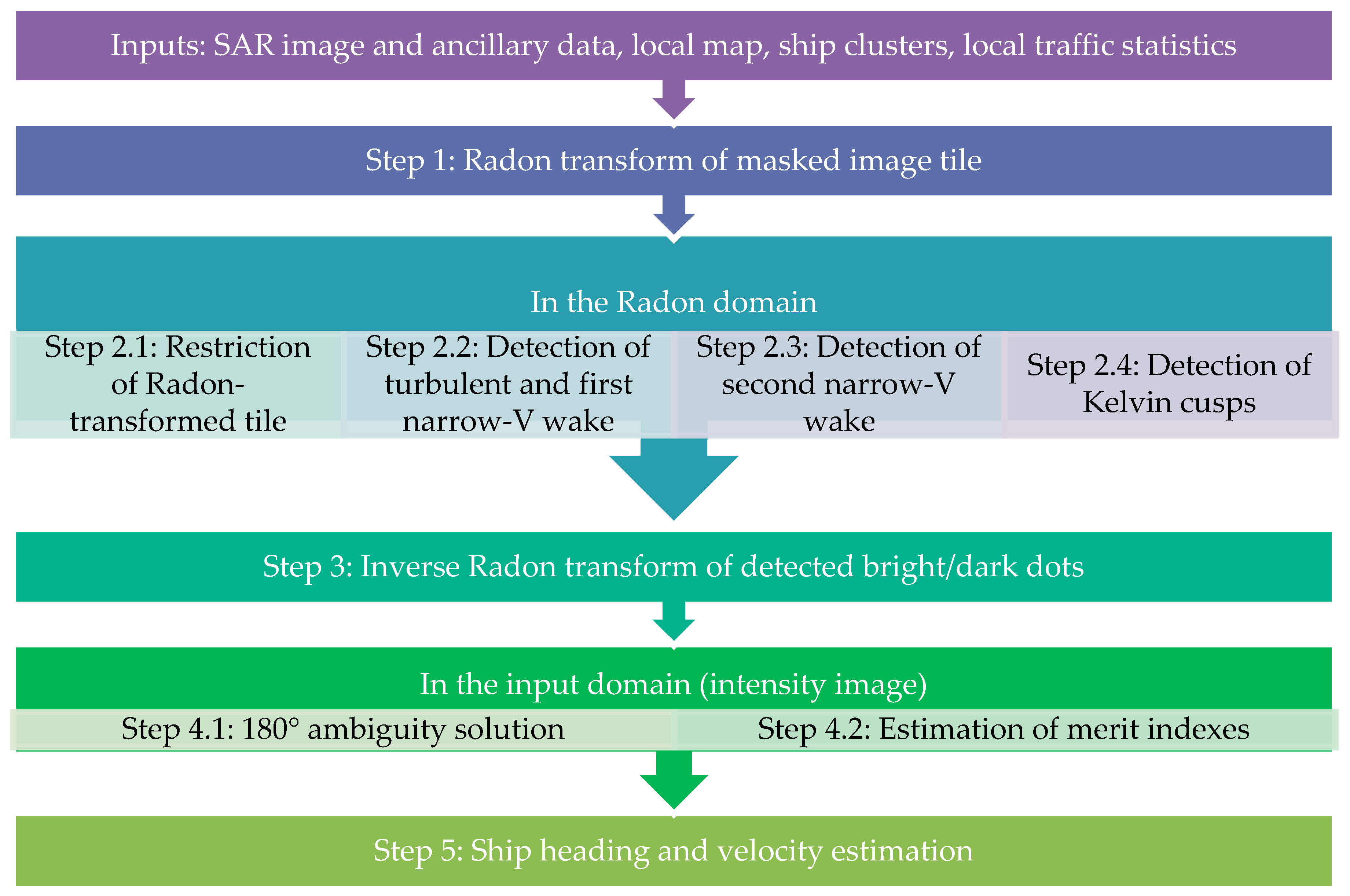
2.1. Algorithm Overview and Objectives
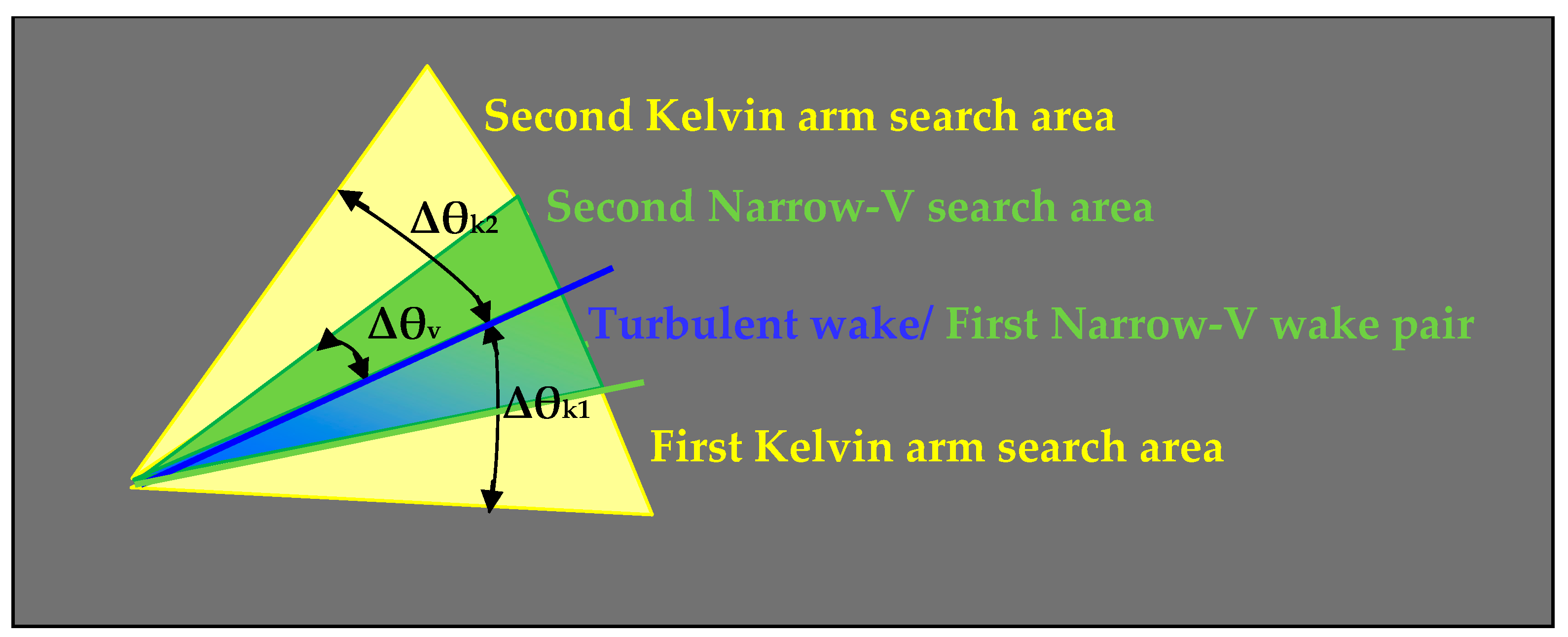
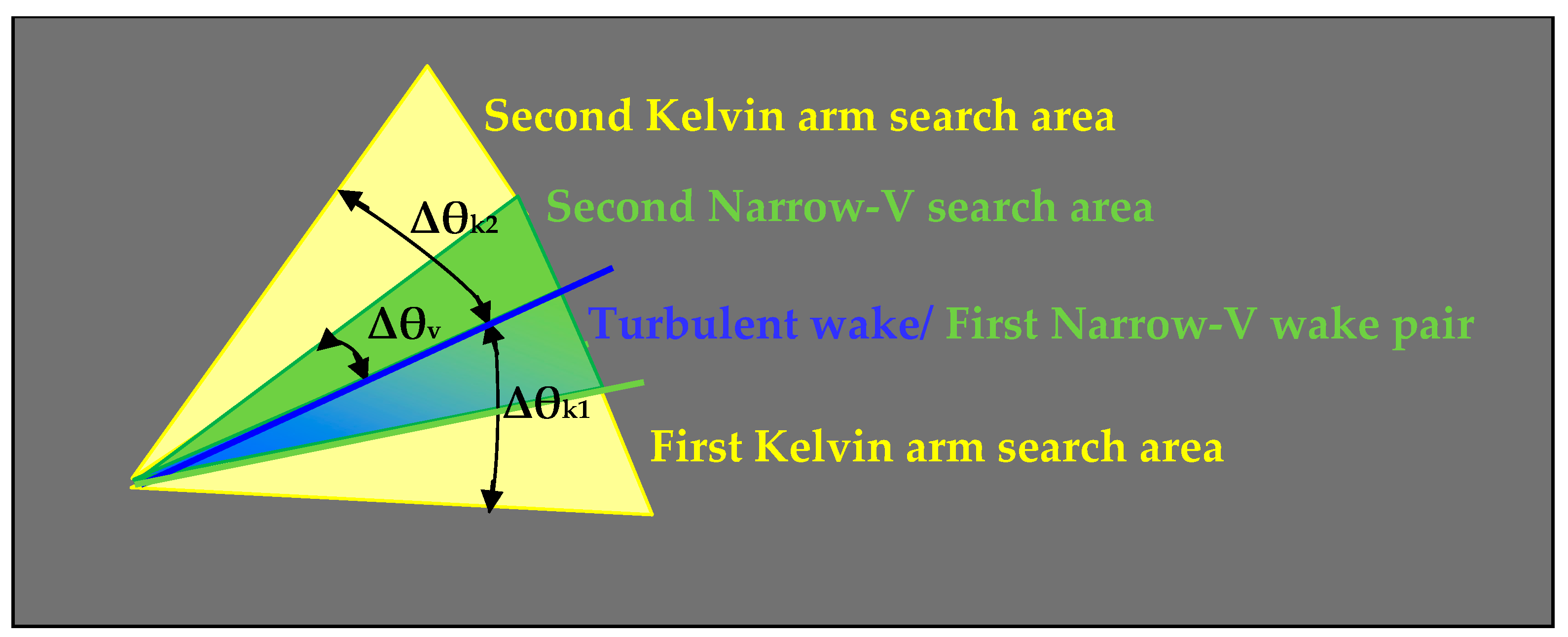
- in the Radon domain, peaks and troughs corresponding to the typical five wake components are searched and always identified according to the hydrodynamic theory [17] (no threshold logic), exploiting the physical characteristics in terms of relative angular distance;
- ship signature is masked and not summed in the Radon integral;
- the turbulent and one narrow-V wakes are contemporaneously identified as a pair;
- merit indexes are defined in the intensity domain and are utilized to get the final confirmation of the detected wake features.
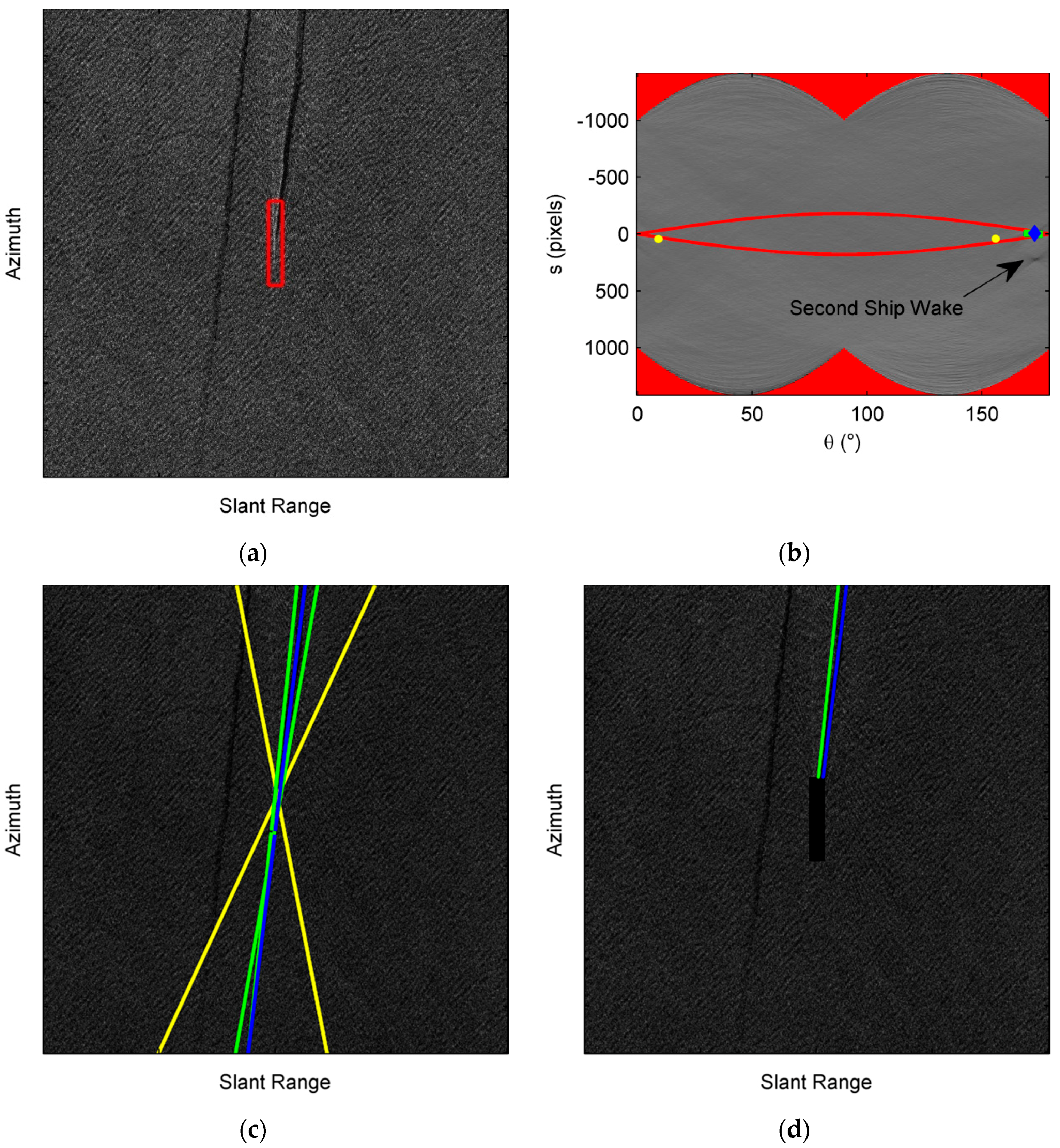
2.2. Wake Component Detection
2.3. Wake Component Validation
2.4. Ship Heading and Velocity
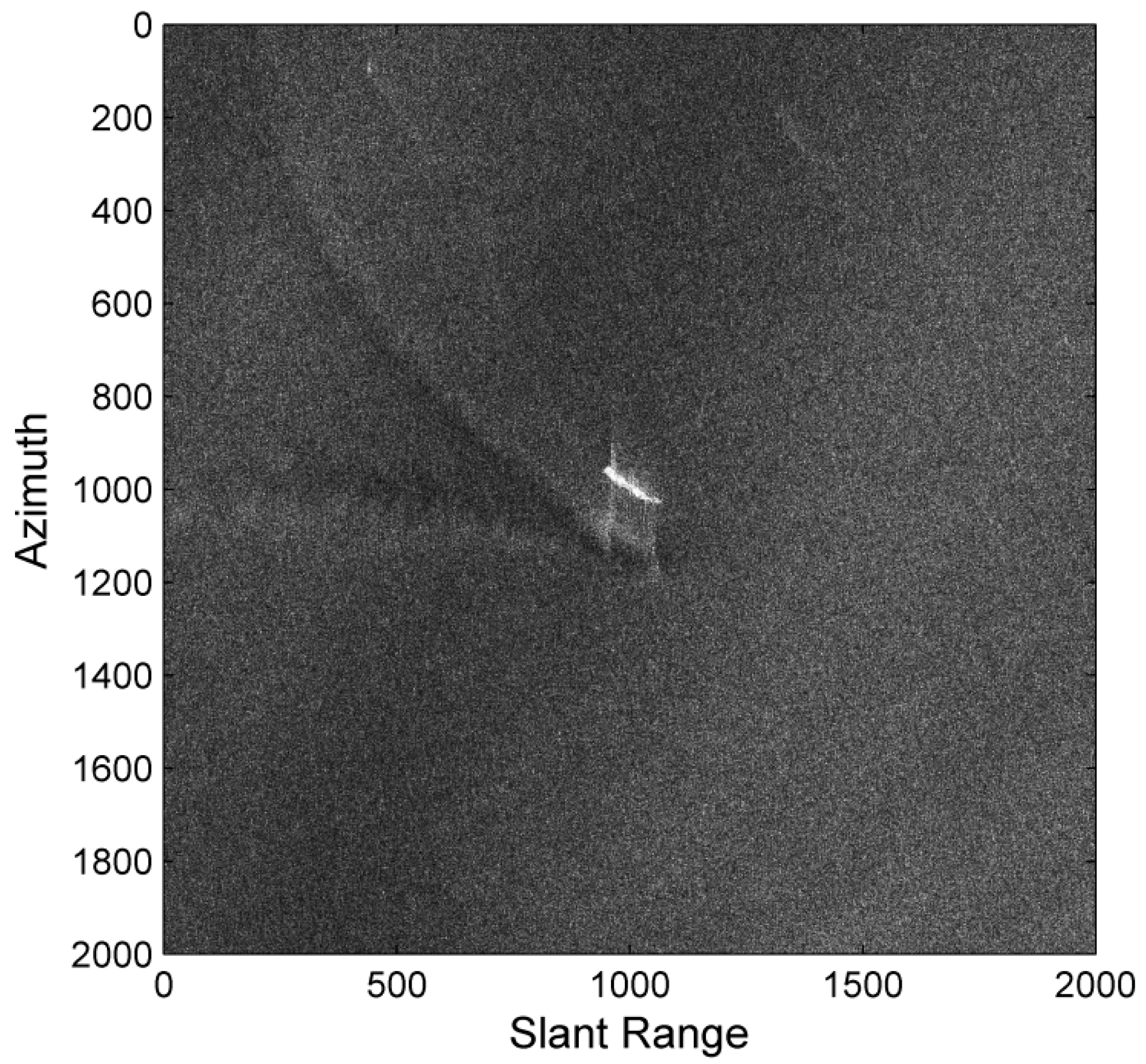
3. Results and Discussion
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- EMSA, 2010. EMSA 5-Year Strategy. Available online: https://extranet.emsa.europa.eu/ (accessed on 26 January 2016).
- Council of the European Union, “Council Conclusion on Integration of Maritime Surveillance,” General Affairs Council Meeting, 23 May 2011. Available online: http://www.consilium.europa.eu/uedocs/cms_data/docs/pressdata/EN/genaff/122177.pdf (accessed on 26 January 2016).
- EMSA. EMSA’s View on GMES Programme of EU and ESA; in Particular on the Marine Core Service—Updated Version. Lisbon 5 December Ref. H.2/OTR/2007. Available online: http://www.emsa.europa.eu/csn-menu/122/722.html (accessed on 26 January 2016).
- Margarit, G.; Milanés, J.A.B.; Tabasco, A. Operational ship monitoring system based on synthetic aperture radar processing. Remote Sens. 2009, 1, 375–392. [Google Scholar] [CrossRef]
- Marino, A.; Sanjuan-Ferrer, M.J.; Hajnsek, I.; Ouchi, K. Ship detection with spectral analysis of synthetic aperture radar: A comparison of new and well-known algorithms. Remote Sens. 2015, 7, 5416–5439. [Google Scholar] [CrossRef]
- Huang, X.; Yang, W.; Zhang, H.; Xia, G.-S. Automatic ship detection in SAR images using multi-scale heterogeneities and an a Contrario decision. Remote Sens. 2015, 7, 7695–7711. [Google Scholar] [CrossRef]
- Crisp, D.J. The State-of-the-Art in Ship Detection in Synthetic Aperture Radar Imagery, doc# DSTO–RR–0272, 2004, 126, DSTO, Inf. Sci. Lab., Edinburgh, Australia. Available online: http://www.dtic.mil/get-tr-doc/pdf?AD=ada426096 (accessed on 26 January 2016).
- Greidanus, H. Satellite imaging for maritime surveillance of the european seas. Remote Sens. Eur. Seas 2008, 22, 343–358. [Google Scholar] [CrossRef]
- Eldhuset, K. An automatic ship and ship wake detection system for spaceborne SAR images in coastal regions. IEEE Trans. Geosci. Remote Sens. 1996, 34, 1010–1019. [Google Scholar] [CrossRef]
- Vachon, P.W.; Campbell, J.W.M.; Bjerkelund, C.A.; Dobson, F.W.; Rey, M.T. Ship detection by the RADARSAT SAR: Validation of detection model predictions. Can. J. Remote Sens. 1997, 23, 48–59. [Google Scholar] [CrossRef]
- Raney, R.K. Synthetic aperture imaging radar and moving targets. IEEE Trans. Aerosp. Electron. Syst. 1971, AES-7, 499–505. [Google Scholar] [CrossRef]
- Ouchi, K. On Multilook Images of Moving Targets by Synthetic Aperture Radars. IEEE Trans. Antennas Propag. 1985, 33, 823–827. [Google Scholar] [CrossRef]
- Ouchi, K.; Iehara, M.; Morimura, K.; Kumano, S.; Takami, I. Nonuniform azimuth image shift observed in the Radarsat images of ships in motion. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2188–2195. [Google Scholar] [CrossRef]
- Tunaley, J.K.E. The estimation of ship velocity from SAR imagery. IEEE Trans. Geosci. Remote Sens. 2003, 1, 191–193. [Google Scholar] [CrossRef]
- Zilman, G.; Zapolski, A.; Marom, M. The speed and beam of a ship from its wake’s SAR images. IEEE Trans. Geosci. Remote Sens. 2004, 42, 23–43. [Google Scholar] [CrossRef]
- Zilman, G.; Zapolski, A.; Marom, M. On Detectability of a Ship’s Kelvin Wake in Simulated SAR Images of Rough Sea Surface. IEEE Trans. Geosci. Remote Sens. 2014, 53, 609–619. [Google Scholar] [CrossRef]
- Pichel, W.G.; Colon, P.C.; Wackerman, C.; Friedman, K.S. Ship and Wake Detection. In SAR Marine Users Manual; NOAA: Washington, DC, USA, 2004; Chapter 12. Available online: http://www.sarusersmanual.com (accessed on 26 January 2016). [Google Scholar]
- Rosenfeld, A.; Kak, A.C. Reconstruction. In Digital Picture Processing, Second Edition, Computer Sciences and Applied Mathematics; Academic Press Inc.: Orlando, FL, USA, 1982; Chapter 8; pp. 353–430. ISBN 0125973020. [Google Scholar]
- Illingworth, J.; Kittler, J. A survey of the Hough transform. Comput. Vis. Graphics Image Process. 1988, 44, 87–116. [Google Scholar] [CrossRef]
- Arnord-Bos, A.; Khenchaf, A.; Martin, A. An Evaluation of Current Ship Wake Detection Algorithms in SAR Images. Caractérisation du Milieu Marin. 2006, p. 8. Available online: http://people.irisa.fr/Arnaud.Martin/publi/ARNOLD_06b.pdf (accessed on 26 January 2016).
- Murphy, L.M. Linear feature detection and enhancement in noisy images via Radon transform. Pattern Recognit. Lett. 1986, 4, 279–284. [Google Scholar] [CrossRef]
- Tunaley, J.K.E.; Buller, E.H.; Wu, K.H.; Rey, M.T. The Simulation of the SAR image of a ship wake. IEEE Trans. Geosci. Remote Sens. 1991, 29, 149–156. [Google Scholar] [CrossRef]
- Rey, M.T.; Tunaley, J.; Folinsbee, J.T.; Jahans, P.A.; Dixon, J.A.; Vant, M.R. Application of Radon transform Techniques to Wake Detection in Seasat-A SAR Images. IEEE Trans. Geosci. Remote Sens. 1990, 28, 553–560. [Google Scholar] [CrossRef]
- Lorenzzetti, J.A.; Paes, R.L.; Gherardi, D.M. A Performance Comparison of a CFAR Ship Detection Algorithm Using Envisat, Radarsat, Cosmo-Skymed and Terrasar-X Images. In Proceedings of the SeaSAR 2010, Frascati, Italy, 25–29 January 2010; ESA SP-679. 2010. [Google Scholar]
- Paes, R.L.; Lorenzzetti, J.A.; Gherardi, D.F.M. Ship detection using terrasar-x images in the campos basin (Brazil). IEEE Geosci. Remote Sens. Lett. 2010, 7, 545–548. [Google Scholar] [CrossRef]
- Ermakov, S.; Kapustin, I.; Lazareva, T. Ship wake signatures in radar/optical images of the sea surface: observations and physical mechanisms. In Proceedings of the SPIE Remote Sensing of the Ocean, Sea Ice, Coastal Waters, and Large Water Regions 2014, Amsterdam, The Netherland, 14 October 2014; p. 6. [CrossRef]
- On-Line Source. Available online: https://www.marinetraffic.com (accessed on 26 January 2016).
- Graziano, M.D.; Rufino, G.; D’Errico, M. Wake-based ship route estimation in high-resolution SAR images. In Proceedings of the SPIE Remote Sensing, SAR Image Analysis, Modeling, and Techniques XIV, Amsterdam, The Netherland, 22–25 September 2014; p. 12. [CrossRef]
- Hintzen, N.T.; Piet, G.J.; Brunel, T.P. Improved estimation of trawling tracks using cubic Hermite spline interpolation of position registration data. Fish. Res. 2010, 101, 108–115. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
θv2 Selection  | If θv1 is clockwise with respect to θt, θv2 is counterclockwise with respect to θt | If θv1 is counterclockwise with respect to θt, θv2 is clockwise with respect to θt  | ||
| sv2 Selection | if θt < 90° | st − Δsv2 < sv2 < st | if θt < 90° − Δθv | st < sv2 < st + Δsv2 |
| if 90° < θt < 90° + Δθv | st − Δsv2 < sv2 < st + Δsv2 | if 90° − Δθv < θt < 90° | st − Δsv2 < sv2 < st + Δsv2 | |
| if θt > 90° + Δθv | st < sv2 < st + Δsv2 | if θt > 90° | st − Δsv2 < sv2 < st | |
| θk1 Selection | θk1 is clockwise with respect to θt | |
| sk1 Selection | if θt < 90° − Δθk | st < sk1 <st + Δsk |
| if 90° − Δθk < θt < 90° | st − Δsk < sk1 < st + Δsk | |
| if θt > 90° | st − Δsk< sk1 < st | |
| θk2 Selection | θk2 is counterclockwise respect to θt | |
| sk2 Selection | if θt < 90° | st − Δsk < sk2 < st |
| if 90° < θt < 90° + Δθk | st − Δsk < sk2 < st + Δsk | |
| if θt > 90° + Δθk | st < sk2 < st + Δsk | |
| Acquisition Date | Polarization | Wake ID | Incidence Angle (°) | Azimuth Displacement Velocity Estimation | AIS Data Velocity | |
|---|---|---|---|---|---|---|
| Ground Range Component (knots) | Ship Heading Component (knots) | Ship Heading Component (knots) | ||||
| 30 June 2008 04:57 | HH | #1 | 24.6 | 27.5 | - | - |
| #2 | 23.3 | - | - | - | ||
| #3 | 23.3 | - | - | - | ||
| 18 June 2011 17:09 | VV | #4 | 36.4 | - | - | - |
| 25 June 2011 17:08 | VV | #5 | 36.1 | - | - | - |
| 5 August 2011 04:50 | VV | #6 | 34.0 | - | - | - |
| #7 | 34.1 | - | - | - | ||
| #8 | 34.2 | 22.0 | - | - | ||
| 23 June 2012 17:05 | VV | #9 | 36.41 | 17.1 | 20.9 | 22 |
| #10 | 35.9 | - | - | - | ||
| #11 | 36.1 | 28.3 | 28.8 | 23.2 | ||
| 6 July 2012 17:05 | HH | #12 | 35.6 | 11.2 | 15.31 | 16.8 |
| #13 | 35.7 | - | - | - | ||
| #14 | 35.7 | - | - | - | ||
| #15 | 36.2 | - | - | - | ||
| 7 August 2012 17:05 | VV | #16 | 36.1 | - | - | - |
| #17 | 36.0 | 16.3 | 21.3 | 21.7 | ||
| #18 | 35.8 | 21.1 | 28.2 | 29.3 | ||
| #19 | 36.4 | 9.2 | 10.1 | 11.9 | ||
| 3 July 2013 16:50 | HH | #20 | 50.3 | - | - | - |
| #21 | 50.0 | - | - | - | ||
| Acquisition Date | Polarization | Wake ID | Incidence Angle (°) | Azimuth Displacement Velocity Estimation | AIS Data Velocity | |
|---|---|---|---|---|---|---|
| Ground Range Component (knots) | Ship Heading Component (knots) | Ship Heading Component (knots) | ||||
| 3 August 2012 05:20 | VV | #22 | 21.3 | - | - | - |
| #23 | 21.7 | - | - | - | ||
| 9 June 2011 16:49 | VV | #24 | 27.7 | 5.8 | - | - |
| #25 | 28.1 | - | - | - | ||
| #26 | 28.5 | - | - | - | ||
| #27 | 28.5 | - | - | - | ||
| 29 June 2013 05:20 | VV | #28 | 21.7 | - | - | - |
| #29 | 21.8 | - | - | - | ||
| #30 | 21.8 | - | - | - | ||
| 10 July 2013 05:20 | VV | #31 | 21.8 | - | - | - |
| #32 | 21.8 | - | - | - | ||
| 5 June 2014 05:20 | VV | #33 | 21.6 | 10.2 | 10.2 | 9.6 |
| #34 | 21.8 | - | - | - | ||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Graziano, M.D.; D’Errico, M.; Rufino, G. Wake Component Detection in X-Band SAR Images for Ship Heading and Velocity Estimation. Remote Sens. 2016, 8, 498. https://doi.org/10.3390/rs8060498
Graziano MD, D’Errico M, Rufino G. Wake Component Detection in X-Band SAR Images for Ship Heading and Velocity Estimation. Remote Sensing. 2016; 8(6):498. https://doi.org/10.3390/rs8060498
Chicago/Turabian StyleGraziano, Maria Daniela, Marco D’Errico, and Giancarlo Rufino. 2016. "Wake Component Detection in X-Band SAR Images for Ship Heading and Velocity Estimation" Remote Sensing 8, no. 6: 498. https://doi.org/10.3390/rs8060498
APA StyleGraziano, M. D., D’Errico, M., & Rufino, G. (2016). Wake Component Detection in X-Band SAR Images for Ship Heading and Velocity Estimation. Remote Sensing, 8(6), 498. https://doi.org/10.3390/rs8060498