
A Bayesian Approach to Combine Landsat and ALOS PALSAR Time Series for Near Real-Time Deforestation Detection


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Bayesian Multi-Sensor Time Series Combination for NRT Deforestation Detection
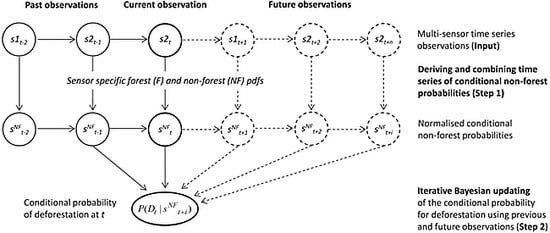
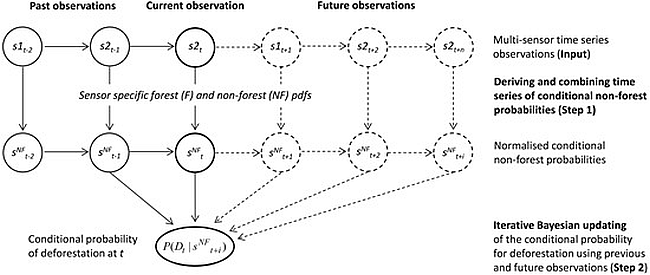
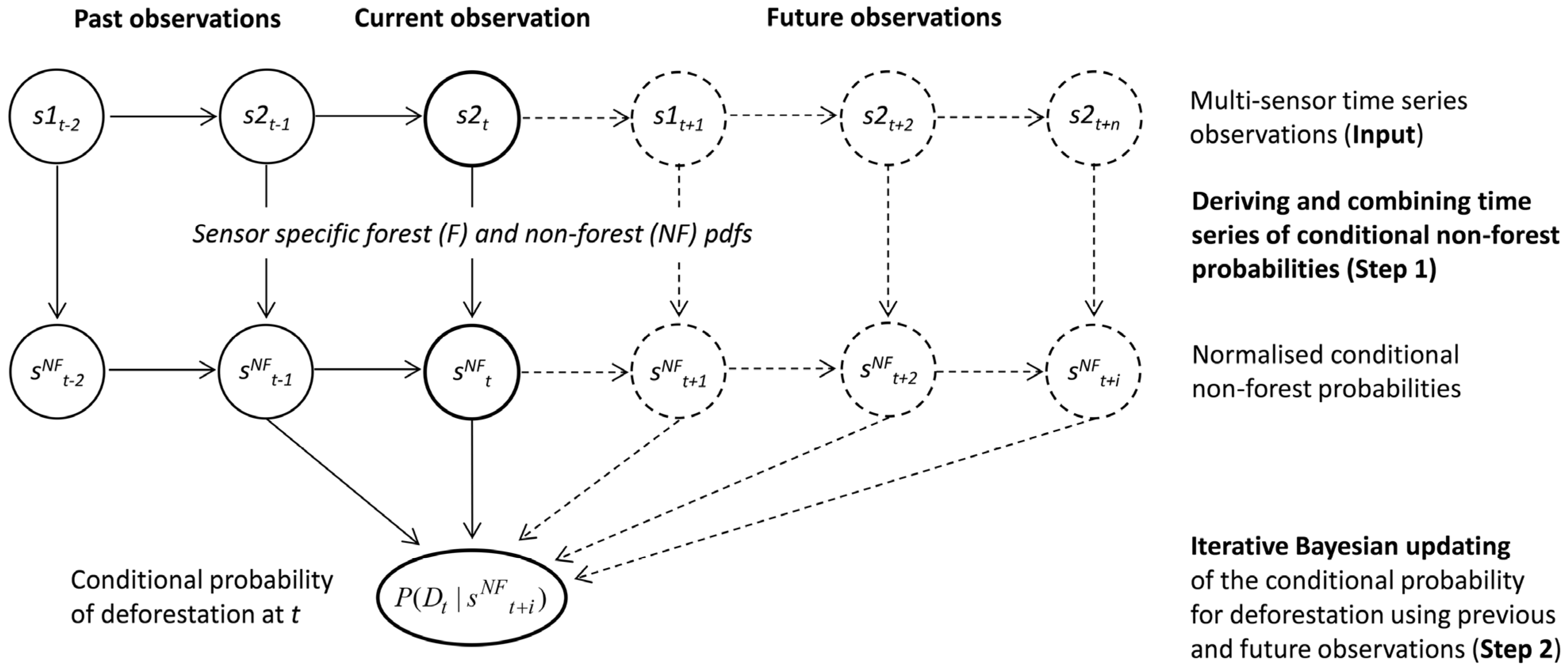
2.1.1. General Description
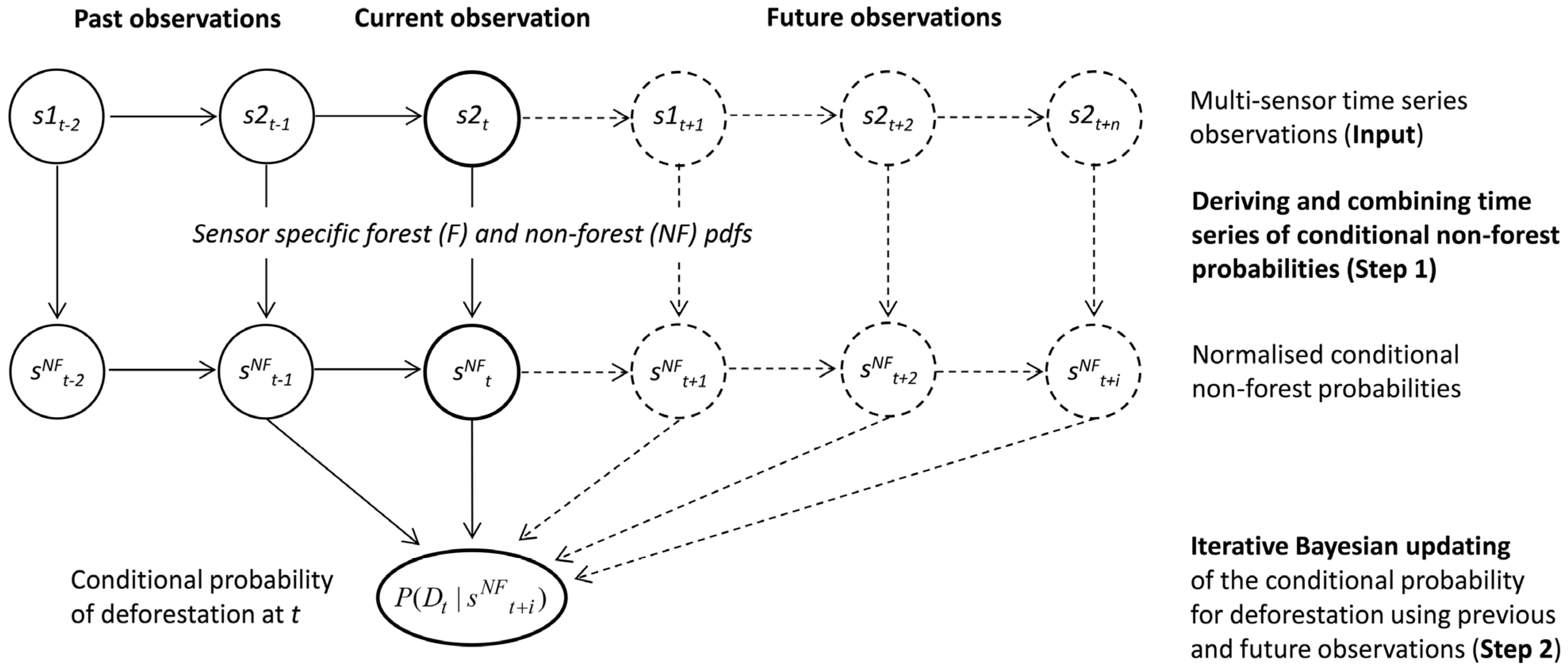
2.1.2. Multi-Sensor Time Series Observations (Input)
2.1.3. Deriving and Combining Time Series of Conditional NF Probabilities (Step 1)
2.1.4. Iterative Bayesian Updating (Step 2)
2.2. Validation
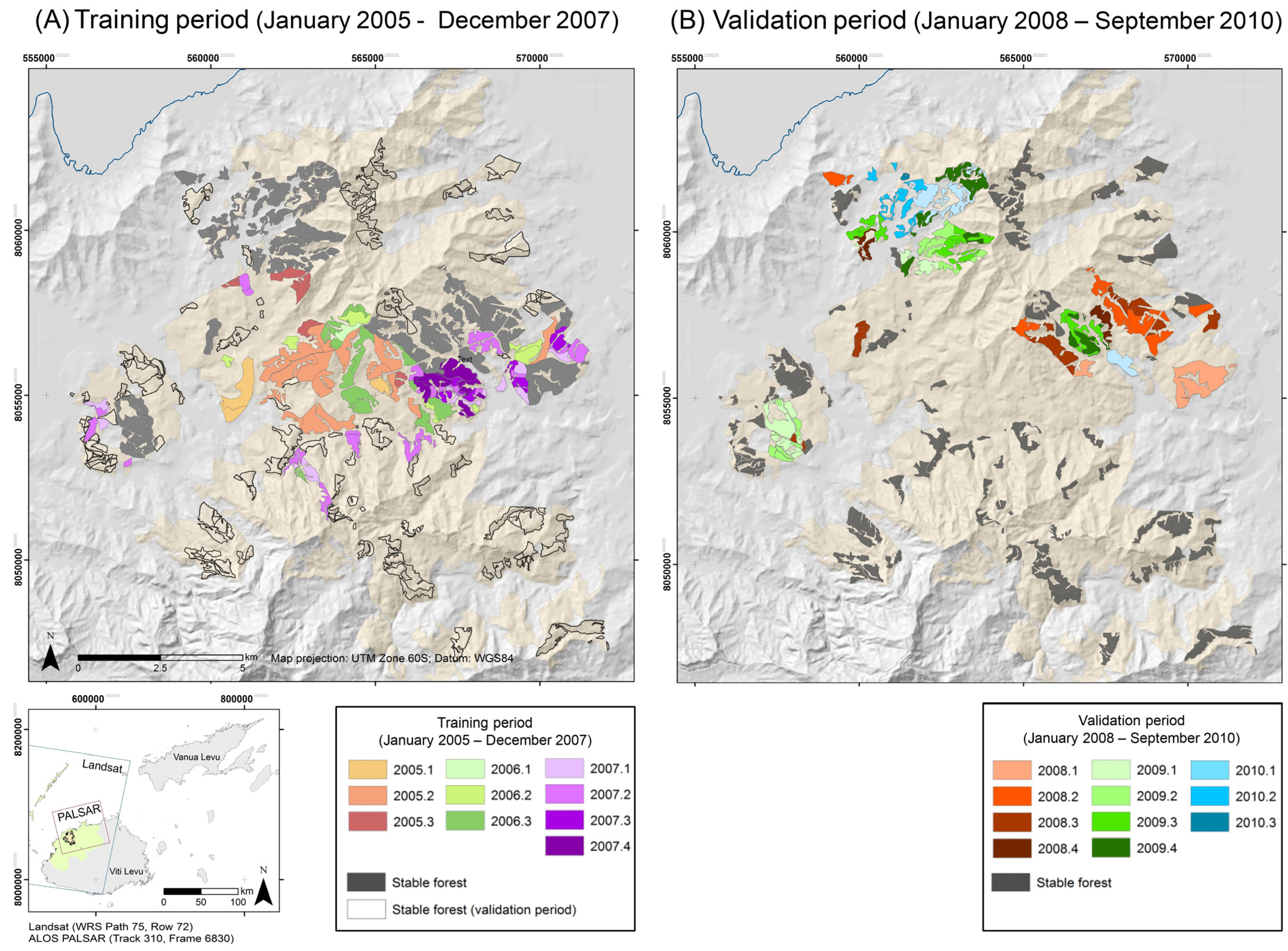
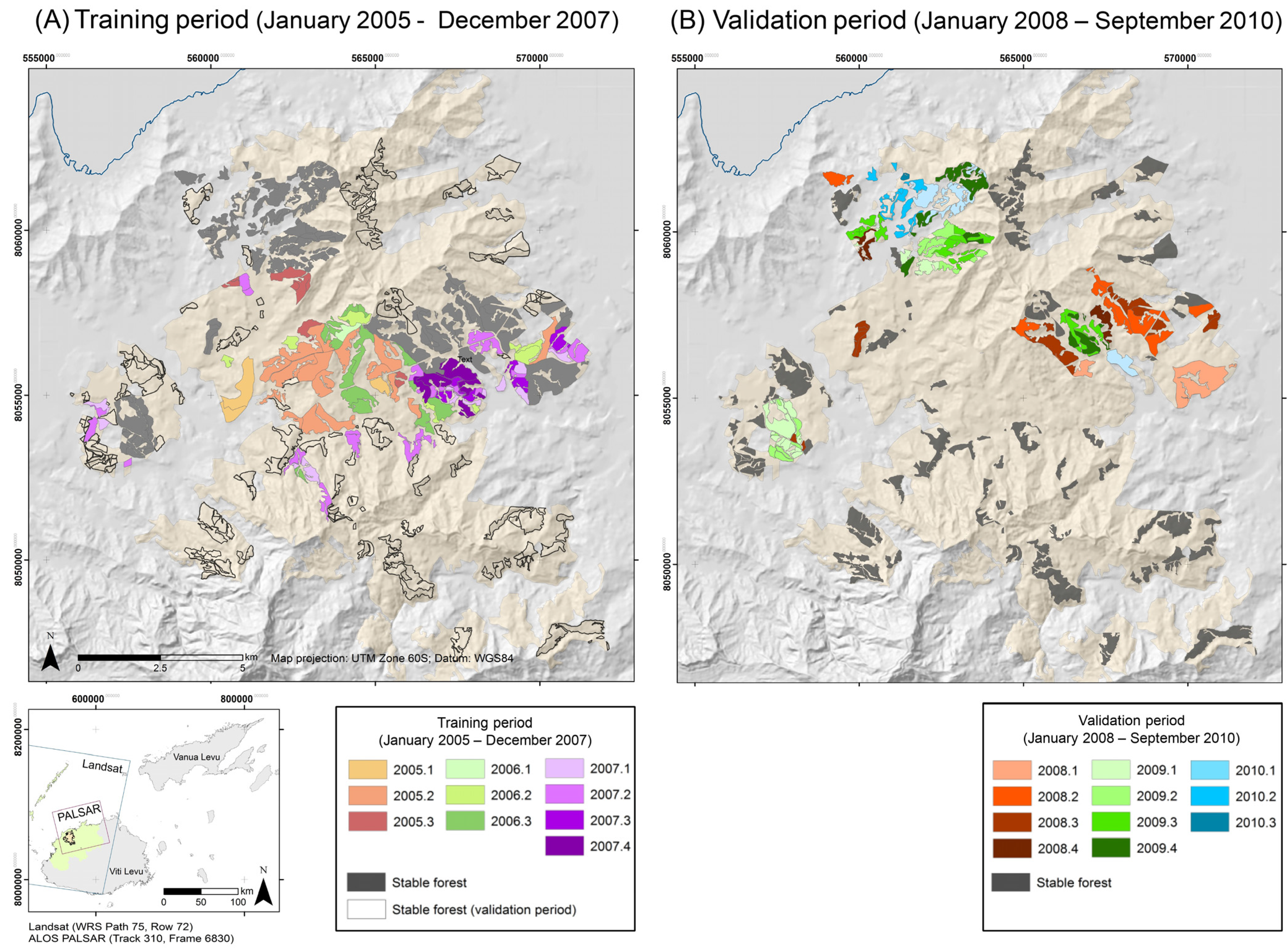
2.2.1. Study Area
2.2.2. Landsat NDVI Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Period | Validation Period | |||||
|---|---|---|---|---|---|---|
| Year | 2005 | 2006 | 2007 | 2008 | 2009 | September 2010 |
| No. of Landsat images | 12 | 14 | 13 | 16 | 14 | 13 |
| No. of ALOS PALSAR FBD images | - | - | 3 | 3 | 1 | 2 |
| Per-Pixel MD | Approximate Number of Per-Pixel Observations Per Year |
|---|---|
| No MD (0%) | 12.3 |
| org (35%–69%) (mean 53%) | 3.8–9.25 (mean 6.5) |
| 70% | 3.8 |
| 80% | 2.5 |
| 90% | 1.2 |
| 95% | 0.6 |
2.2.3. ALOS PALSAR Data
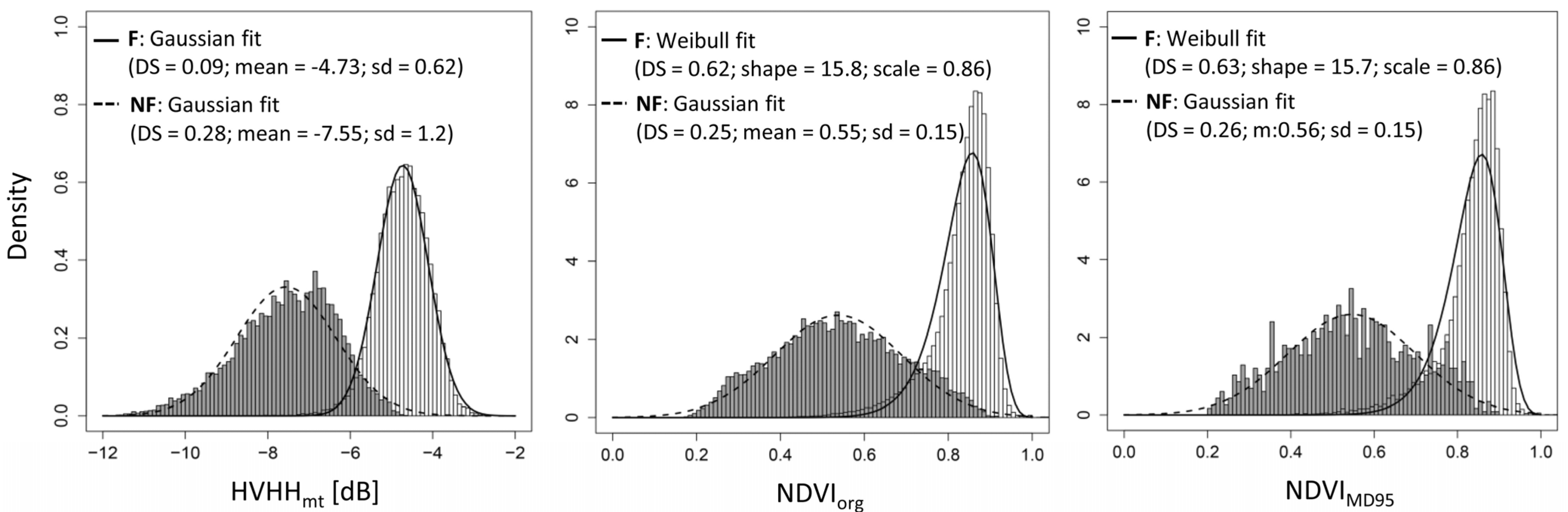
2.2.4. Deriving F and NF pdfs
2.2.5. Detecting Deforestation in an NRT Scenario
3. Results
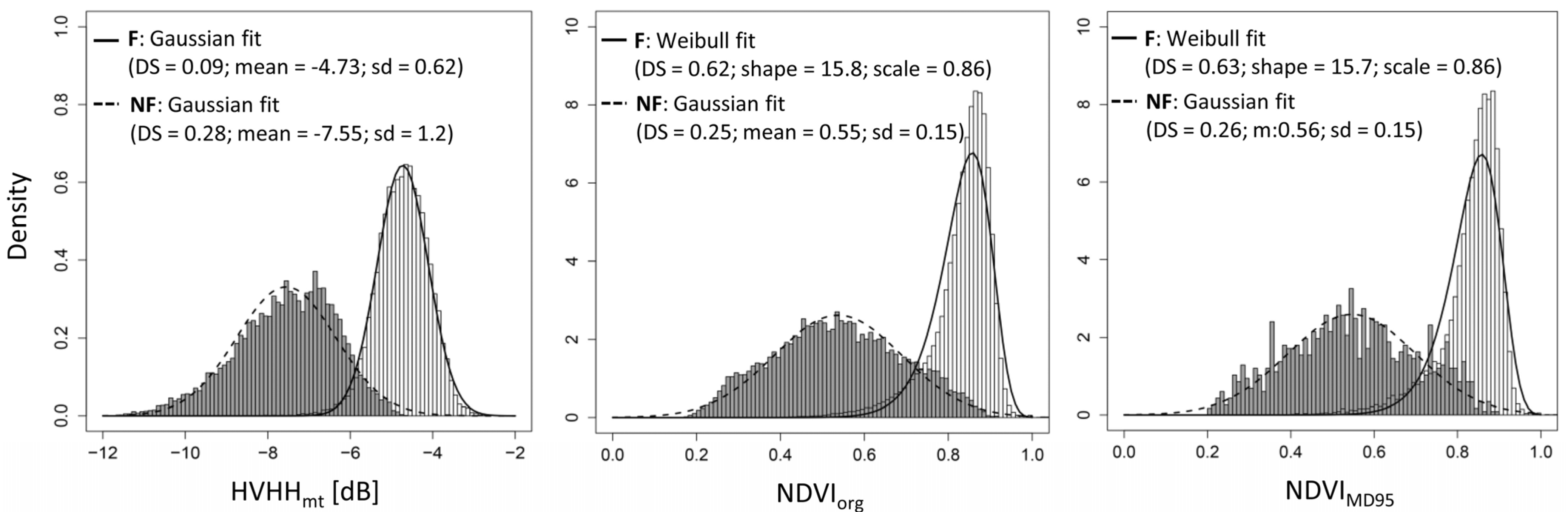
3.1. Deriving F and NF pdfs
3.2. Detecting Deforestation in an NRT Scenario
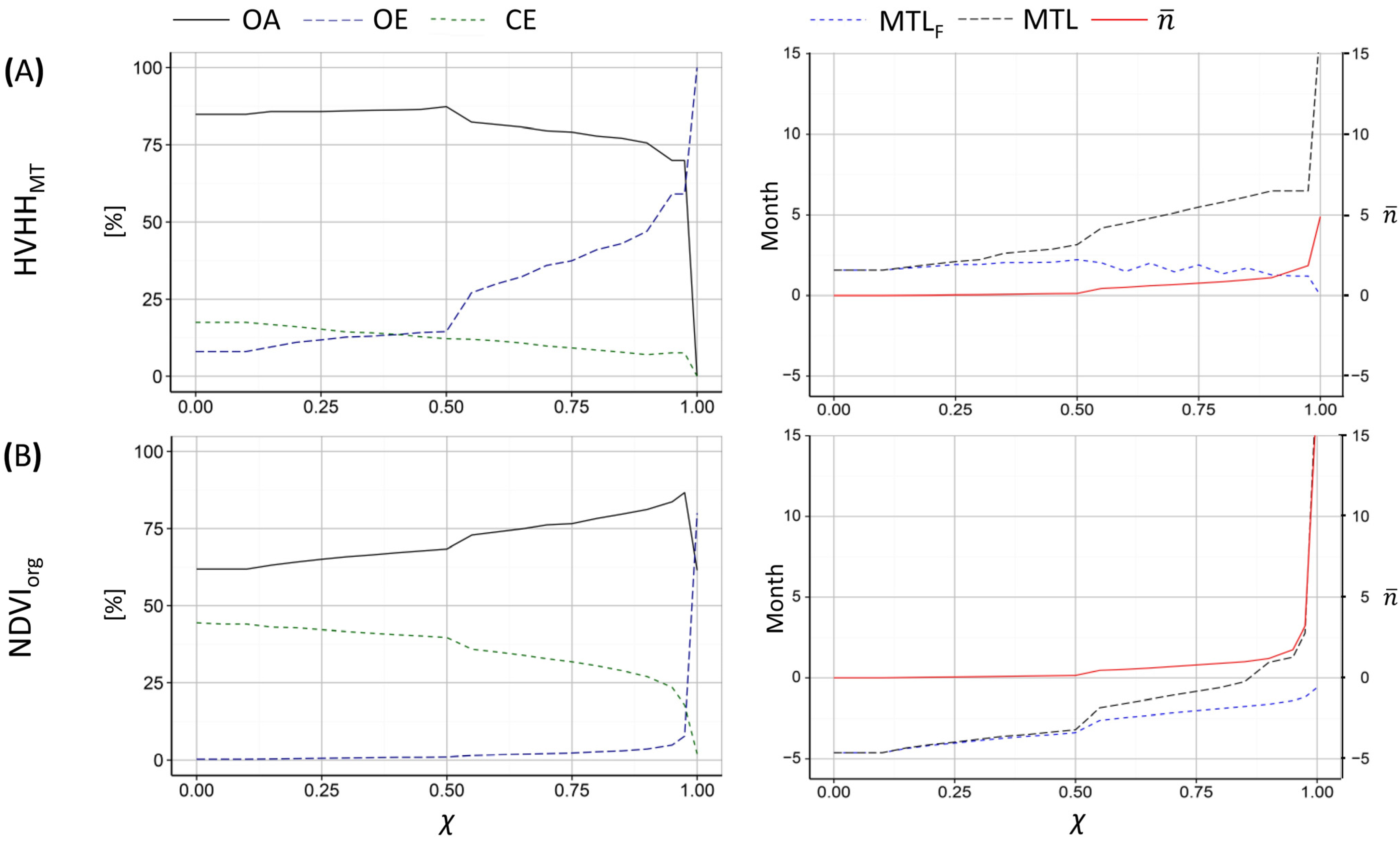
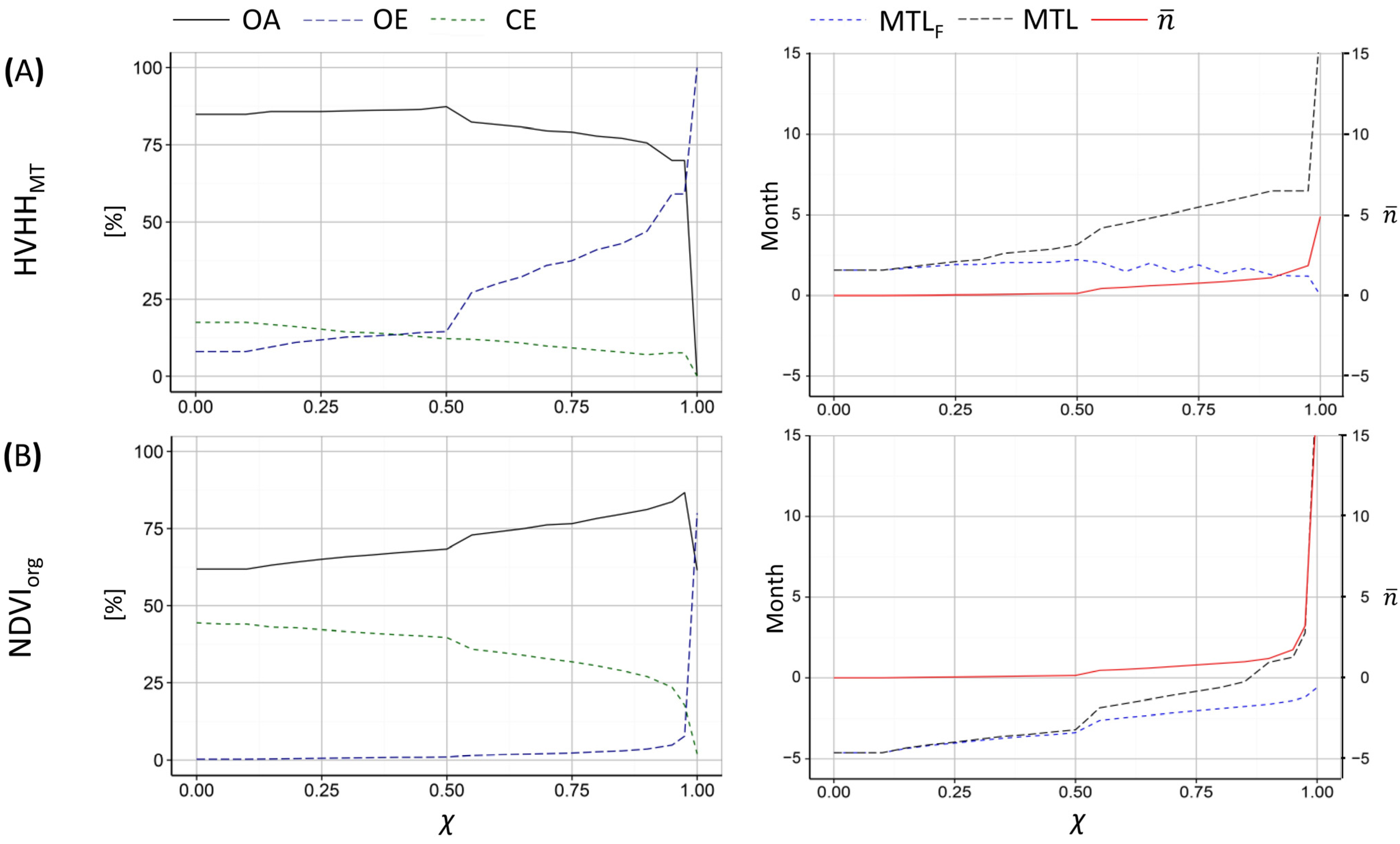
3.2.1. Single-Sensor Results for Increasing the χ Threshold
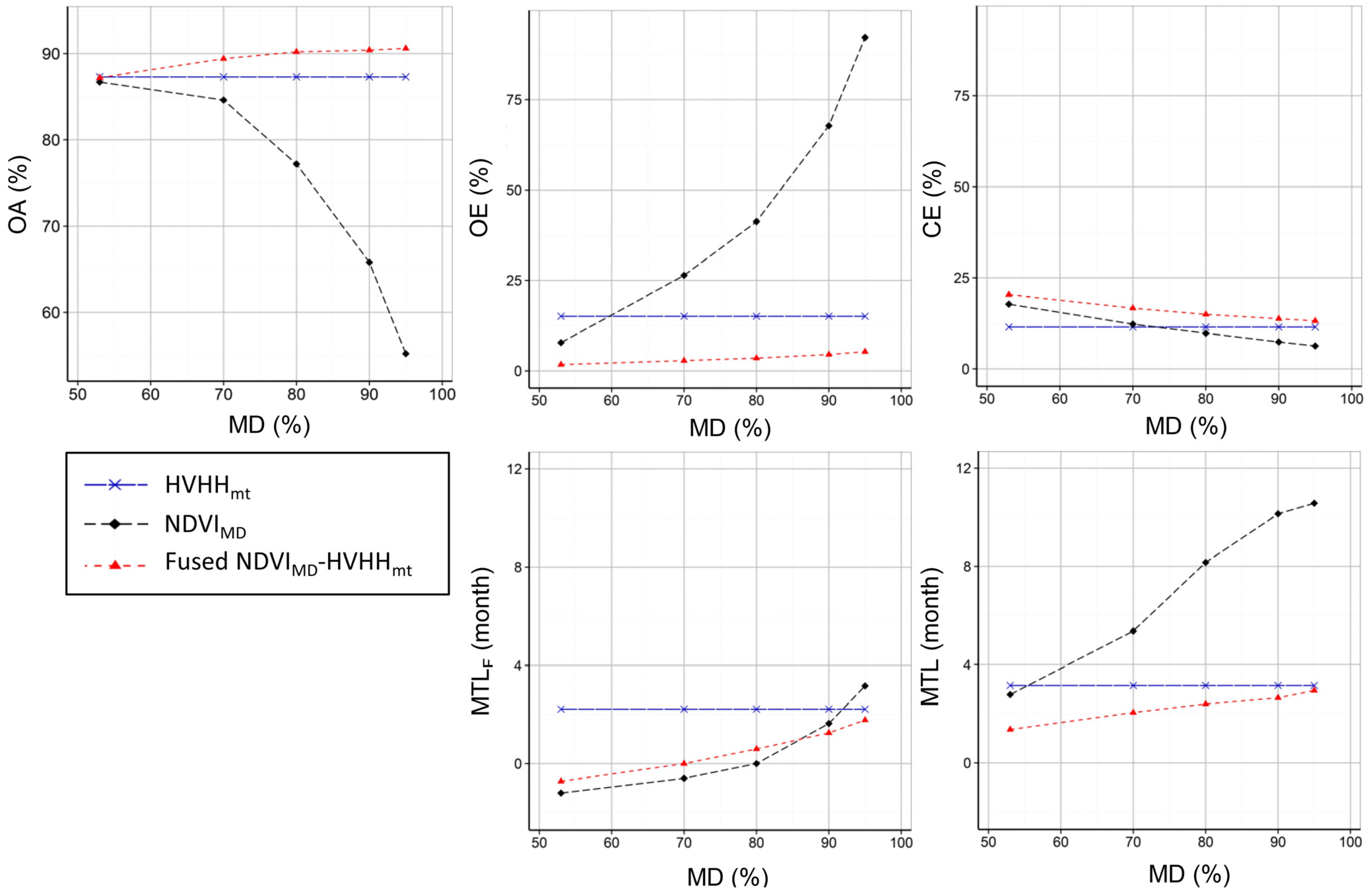
3.2.2. Multi-Sensor Results
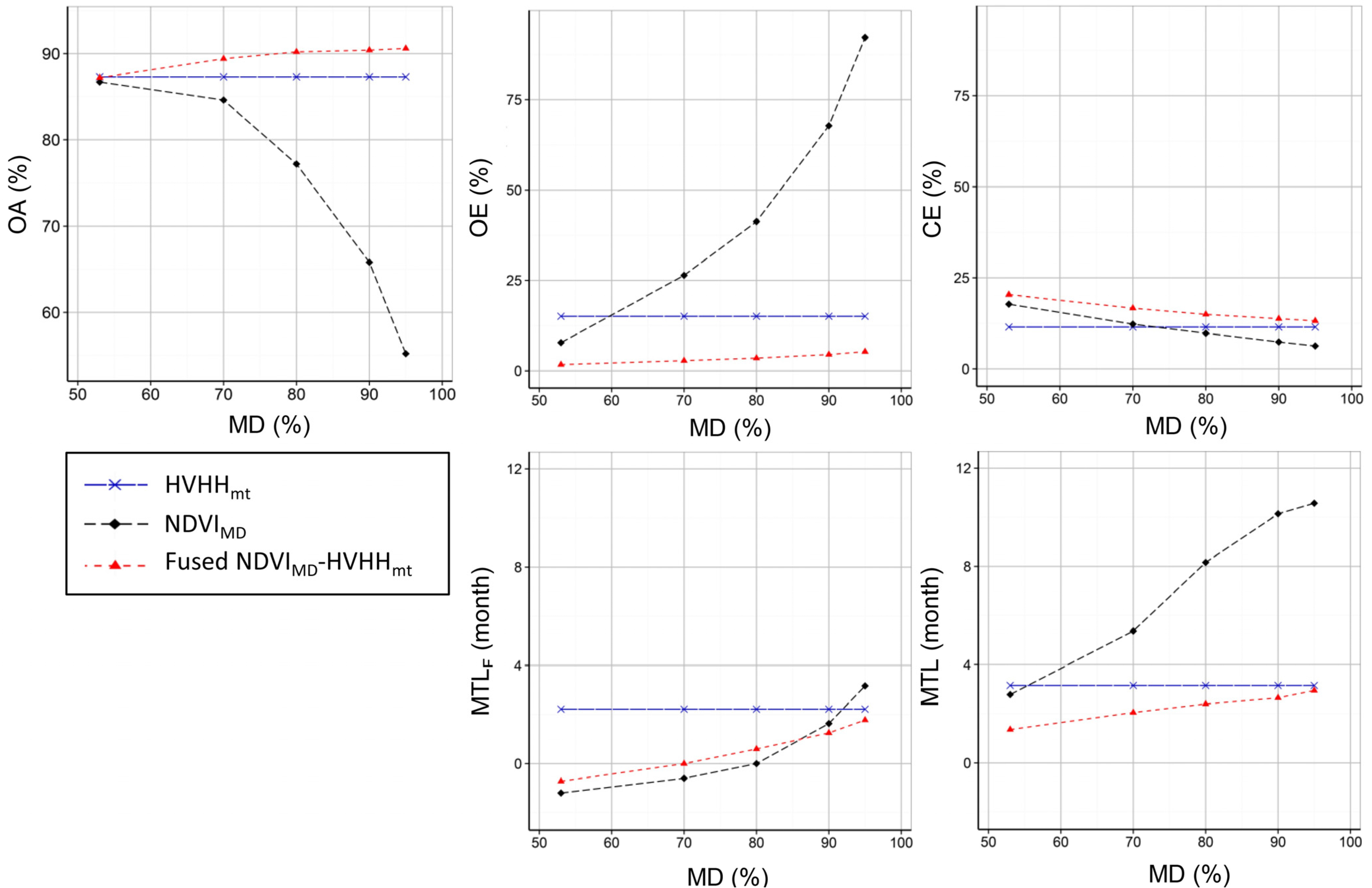
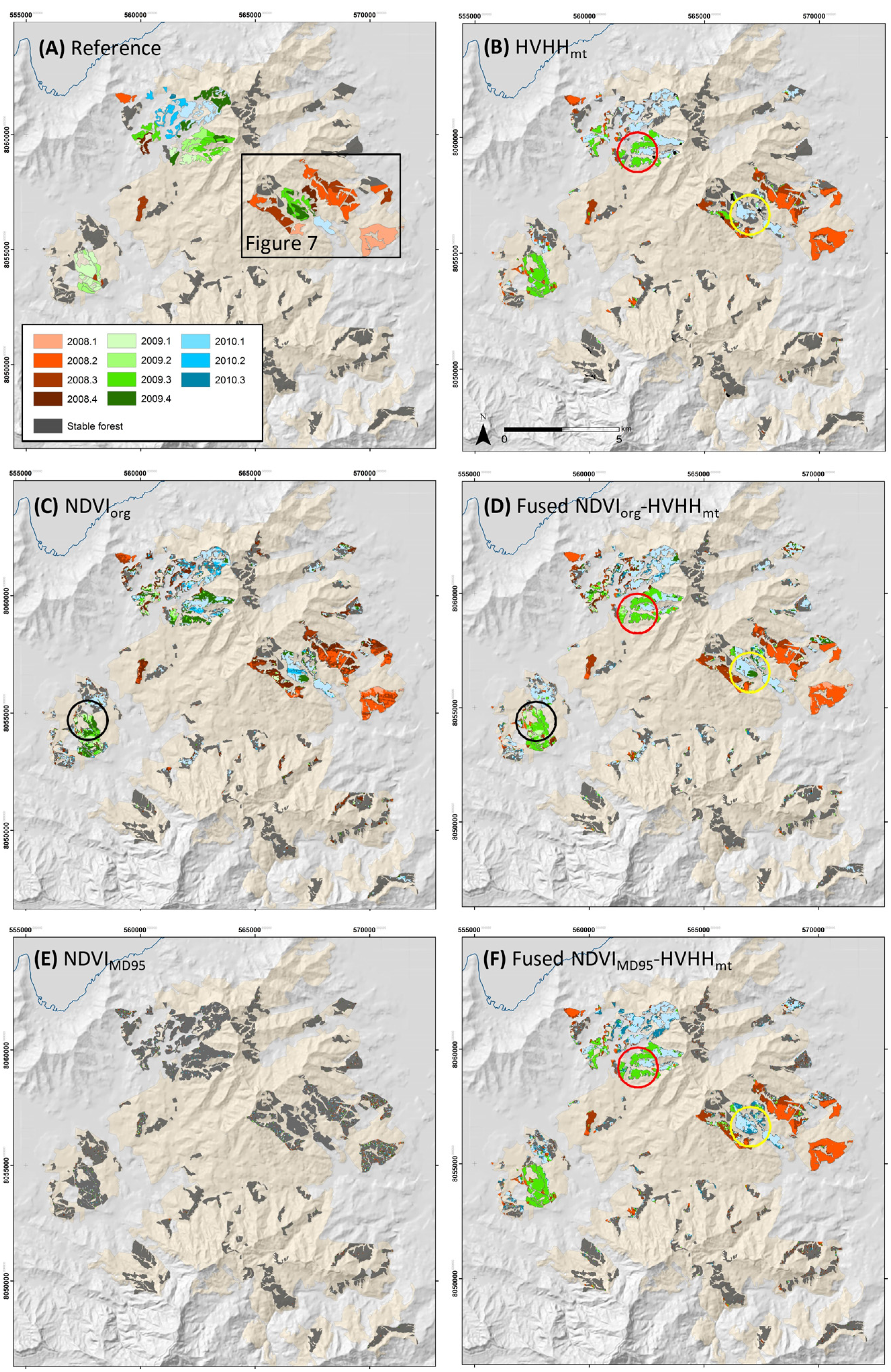
- For HVHHmt-only, the results are identical to the results observed for χ = 0.5 and outlined in the previous section (OA = 87.3%, OE = 14.5%, CE = 12.2%, MTLF = 2.2 months, MTL = 3.2 months).
- For NDVIMD-only, a strong decrease in the spatial and temporal accuracy was observed with increasing MD. Compared to HVHHmt-only, a slightly lower spatial accuracy (OA = 86.7%, OE = 7.8%, CE = 17.8%) was observed for MD = org. The OA dropped from 86.7% for MD = org to 55.2% for MD = 95, mainly due to increasing omitted changes. For MD = 95, the OE reached 92.2%, and the CE slightly decreased to 6.3%. The strong reduction of the observation density with increasing MD led to a strong decrease in temporal accuracy. The MTLF dropped from −1.2 (MD = org) to 3.2 months (MD = 95), and the MTL decreased from 2.8 (MD = org) to 10.6 months (MD = 95).
- For fused NDVIMD-HVHHmt, an improved spatial and temporal accuracy was found compared to NDVIMD- and HVHHmt-only. The MTLF and MTL decreased from −0.7 and 1.3 months (MD = org) to 1.8 and 2.9 months (MD = 95). The OA was found to increase for increasing MD from 87.4% (MD = org) to 90.4% (MD = 95) due to a decreased CE, as a result of the decreasing influence of the NDVIMD on the results. Though the CE is lower when compared to NDVIMD-only and decreased from 20.4% (MD = org) to 13.2% (MD = 95), it was higher when compared to HVHH-only (CE = 12.2%). The OE improved compared to both single-sensor results due to an increased observation density and was found to be only 1.7% for MD = org and slightly increased to 5.3% for MD = 95%.
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Assunção, J.; Gandour, C.; Rocha, R. DETERring Deforestation in the Brazilian Amazon: Environmental Monitoring and Law Enforcement. Available online: http://www.econ.puc-rio.br/uploads/adm/trabalhos/files/DETERring-Deforestation-in-the-Brazilian-Amazon-Environmental-Monitoring-and-Law-Enforcement-Technical-Paper.pdf (accessed on 17 March 2015).
- Lynch, J.; Maslin, M.; Balzter, H.; Sweeting, M. Choose satellites to monitor deforestation. Nature 2013, 496, 293–294. [Google Scholar] [CrossRef] [PubMed]
- Nellermann, C. Green Carbon, Black Trade: Illegal Logggin, Tax Fraud and Laundering in the Worlds Tropical Forests. A Rapid Response Assessment. Available online: http://www.unep.org/pdf/RRAlogging_english_scr.pdf (accessed on 17 March 2015).
- “Illegal” Logging and Clobal Wood Markets: The Competitive Impacts on the U.S. Wood Products Industry, Prepared for American Forest & Paper Association by Seneca Creek Associates and Wood Resources International. 2004.
- Masiero, M.; Secco, L.; Pettenella, D.; Brotto, L. Standards and guidelines for forest plantation management: A global comparative study. For. Policy Econ. 2015, 53, 29–44. [Google Scholar] [CrossRef]
- FAO. Global Forest Resource Assessment 2010. Main Report; Forest Resources Devision, FAO: Rome, Italy, 2010. [Google Scholar]
- Hammer, D.; Kraft, R.; Wheeler, D. Alerts of forest disturbance from MODIS imagery. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 1–9. [Google Scholar] [CrossRef]
- Wheeler, D.; Hammer, D.; Kraft, R.; Steele, A. Satellite-Based Forest Clearing Detection in the Brazilian Amazon: FORMA, DETER, and PRODES; World Resources Institute: Washington, DC, USA, 2014. [Google Scholar]
- Hansen, M.; Potapov, P.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Shimabukuro, Y.E.; Duarte, V.; Anderson, L.O.; Valeriano, D.M.; Arai, E.; Freitas, R.M.D; Rudorff, B.F.T.; Moreira, A.A. Near real time detection of deforestation in the Brazilian Amazon using MODIS imagery. Rev. Ambient. Agua An Interdiscip. J. Appl. Sci. 2006, 1, 37–47. [Google Scholar] [CrossRef]
- Hammer, D.; Kraft, R.; Wheeler, D. FORMA: Forest Monitoring for Action-Rapid Identification of Pan-Tropical Deforestation Using Moderate-Resolution Remotely Sensed Data; Centre for Global Development: Rochester, NY, USA, 2009. [Google Scholar]
- Anderson, L.O.; Shimabukuro, Y.E.; DeFries, R.S.; Morton, D. Assessment of deforestation in near real time over the Brazilian Amazon using multitemporal fraction images derived from Terra MODIS. IEEE Geosci. Remote Sens. Lett. 2005, 2, 315–318. [Google Scholar] [CrossRef]
- Tyukavina, A.; Stehman, S.V; Potapov, P.V; Turubanova, S.A; Baccini, A.; Goetz, S.J.; Laporte, N.T.; Houghton, R.A; Hansen, M.C. National-scale estimation of gross forest aboveground carbon loss: A case study of the Democratic Republic of the Congo. Environ. Res. Lett. 2013, 8, 044039. [Google Scholar] [CrossRef]
- Achard, F.; Beuchle, R.; Mayaux, P.; Stibig, H.-J.; Bodart, C.; Brink, A.; Carboni, S.; Desclée, B.; Donnay, F.; Eva, H.D.; et al. Determination of tropical deforestation rates and related carbon losses from 1990 to 2010. Glob. Chang. Biol. 2014, 20, 2540–2054. [Google Scholar] [CrossRef] [PubMed]
- DeVries, B.; Verbesselt, J.; Kooistra, L.; Herold, M. Robust monitoring of small-scale forest disturbances in a tropical montane forest using Landsat time series. Remote Sens. Environ. 2015, 161, 107–121. [Google Scholar] [CrossRef]
- Griffiths, P.; Kuemmerle, T.; Baumann, M.; Radeloff, V.C.; Abrudan, I.V.; Lieskovsky, J.; Munteanu, C.; Ostapowicz, K.; Hostert, P. Forest disturbances, forest recovery, and changes in forest types across the Carpathian ecoregion from 1985 to 2010 based on Landsat image composites. Remote Sens. Environ. 2013, 151, 72–88. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr—Temporal segmentation algorithms. Remote Sens. Environ. 2010, 114, 2897–2910. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Cohen, W.B.E.; Kennedy, R. Using Landsat-derived disturbance history (1972–2010) to predict current forest structure. Remote Sens. Environ. 2012, 122, 146–165. [Google Scholar] [CrossRef]
- Souza, C.; Siqueira, J.; Sales, M.; Fonseca, A.; Ribeiro, J.; Numata, I.; Cochrane, M.; Barber, C.; Roberts, D.; Barlow, J. Ten-year landsat classification of deforestation and forest degradation in the Brazilian Amazon. Remote Sens. 2013, 5, 5493–5513. [Google Scholar] [CrossRef]
- Potapov, P.V.; Turubanova, S.A.; Hansen, M.C.; Adusei, B.; Broich, M.; Altstatt, A.; Mane, L.; Justice, C.O. Quantifying forest cover loss in Democratic Republic of the Congo, 2000–2010, with Landsat ETM+ data. Remote Sens. Environ. 2012, 122, 106–116. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E.; Olofsson, P. Continuous monitoring of forest disturbance using all available Landsat imagery. Remote Sens. Environ. 2012, 122, 75–91. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Continuous change detection and classification of land cover using all available Landsat data. Remote Sens. Environ. 2014, 144, 152–171. [Google Scholar] [CrossRef]
- Asner, G.P. Cloud cover in Landsat observations of the Brazilian Amazon. Int. J. Remote Sens. 2001, 22, 3855–3862. [Google Scholar] [CrossRef]
- Hirschmugl, M.; Steinegger, M.; Gallaun, H.; Schardt, M. Mapping forest degradation due to selective logging by means of time series analysis: Case studies in Central Africa. Remote Sens. 2014, 6, 756–775. [Google Scholar] [CrossRef]
- Souza, C.; Cochrane, M.; Sales, M.; Monteiro, A.; Mollicone, D. Case Studies on Measuring and Assessing Forest Degradation Integrating Forest Transects and Remote Sensing Data to Quantify Carbon Loss due to Degradation in the Brazilian Amazon; Food and Agriculture Organization of the United Nations: Rome, Italy, 2009. [Google Scholar]
- Sannier, C.; McRoberts, R.E.; Fichet, L.-V.; Makaga, E.M.K. Using the regression estimator with Landsat data to estimate proportion forest cover and net proportion deforestation in Gabon. Remote Sens. Environ. 2014, 151, 138–148. [Google Scholar] [CrossRef]
- Verbesselt, J.; Herold, M.; Zeileis, A. Near real-time disturbance detection using satellite image time series. Remote Sens. Environ. 2012, 123, 98–108. [Google Scholar] [CrossRef]
- Xin, Q.; Olofsson, P.; Zhu, Z.; Tan, B.; Woodcock, C.E. Toward near real-time monitoring of forest disturbance by fusion of MODIS and Landsat data. Remote Sens. Environ. 2013, 135, 234–247. [Google Scholar] [CrossRef]
- Reiche, J.; Verbesselt, J.; Hoekman, D.; Herold, M. Fusing Landsat and SAR time series to detect deforestation in the tropics. Remote Sens. Environ. 2015, 156, 276–293. [Google Scholar] [CrossRef]
- Herold, M. An Assessment of National Forest Monitoring Capabilities in Tropical Non-Annex I Countries: Recommendations for Capacity Building; Friedrich Schiller University Jena: Jena, Germany, 2009; Vol. 22. [Google Scholar]
- Lu, D.; Li, G.; Moran, E. Current situation and needs of change detection techniques. Int. J. Image Data Fusion 2014, 5, 13–38. [Google Scholar] [CrossRef]
- De Sy, V.; Herold, M.; Achard, F.; Asner, G.P.; Held, A.; Kellndorfer, J.; Verbesselt, J. Synergies of multiple remote sensing data sources for REDD+ monitoring. Curr. Opin. Environ. Sustain. 2012, 4, 696–706. [Google Scholar] [CrossRef]
- Almeida-Filho, R.; Shimabukuro, Y.E.; Rosenqvist, A.; Sanchez, G.A. Using dual-polarized ALOS PALSAR data for detecting new fronts of deforestation in the Brazilian Amazonia. Int. J. Remote Sens. 2009, 30, 3735–3743. [Google Scholar] [CrossRef]
- Motohka, T.; Shimada, M.; Uryu, Y.; Setiabudi, B. Using time series PALSAR gamma nought mosaics for automatic detection of tropical deforestation: A test study in Riau, Indonesia. Remote Sens. Environ. 2014, 155, 79–88. [Google Scholar] [CrossRef]
- Ryan, C.M.; Hill, T.; Woollen, E.; Ghee, C.; Mitchard, E.; Cassells, G.; Grace, J.; Woodhouse, I. H.; Williams, M. Quantifying small-scale deforestation and forest degradation in African woodlands using radar imagery. Glob. Chang. Biol. 2012, 18, 243–257. [Google Scholar] [CrossRef]
- Rahman, M.M.; Sumantyo, J.T.S. Quantifying deforestation in the Brazilian Amazon using Advanced Land Observing Satellite Phased Array L-band Synthetic Aperture Radar (ALOS PALSAR) and Shuttle Imaging Radar (SIR)-C data. Geocarto Int. 2012, 27, 463–478. [Google Scholar] [CrossRef]
- Shimada, M.; Itoh, T.; Motooka, T.; Watanabe, M.; Shiraishi, T.; Thapa, R.; Lucas, R. New global forest/non-forest maps from ALOS PALSAR data (2007–2010). Remote Sens. Environ. 2014, 155, 13–31. [Google Scholar] [CrossRef]
- Thapa, R.B.; Shimada, M.; Watanabe, M.; Motohka, T. The tropical forest in south east Asia : Monitoring and scenario modeling using synthetic aperture radar data. Appl. Geogr. 2013, 41, 168–178. [Google Scholar] [CrossRef]
- Whittle, M.; Quegan, S.; Uryu, Y.; Stüewe, M.; Yulianto, K. Detection of tropical deforestation using ALOS-PALSAR: A Sumatran case study. Remote Sens. Environ. 2012, 124, 83–98. [Google Scholar] [CrossRef]
- Luckman, A.; Baker, J.; Kuplich, T.M.; da Costa Freitas Yanasse, C.; Frery, A.C. A study of the relationship between radar backscatter and regenerating tropical forest biomass for spaceborne SAR instruments. Remote Sens. Environ. 1997, 60, 1–13. [Google Scholar] [CrossRef]
- Ribbes, F.; Le Toan, T.L.; Bruniquel, J.; Floury, N.; Stussi, N.; Wasrin, U.R. Deforestation monitoring in tropical regions using multitemporal ERS/JERS SAR and INSAR data. In Proceedings of the 1997 IEEE Geoscience and Remote Sensing Symposium (IGARSS 1997), Singapore, 3–8 August 1997.
- Rosenqvist, A.; Shimada, M.; Member, S.; Ito, N.; Watanabe, M. ALOS PALSAR: A pathfinder mission for global-scale monitoring of the environment. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3307–3316. [Google Scholar] [CrossRef]
- Lehmann, E.A.; Caccetta, P.; Zhou, Z.-S.; McNeill, S.J.; Wu, X.; Mitchell, A.L. Joint processing of Landsat and ALOS-PALSAR data for forest mapping and monitoring. IEEE Trans. Geosci. Remote Sens. 2012, 50, 55–67. [Google Scholar] [CrossRef]
- Lehmann, E.A.; Caccetta, P.; Lowell, K.; Mitchell, A.; Zhou, Z.-S.; Held, A.; Milne, T.; Tapley, I. SAR and optical remote sensing: Assessment of complementarity and interoperability in the context of a large-scale operational forest monitoring system. Remote Sens. Environ. 2015, 156, 335–348. [Google Scholar] [CrossRef]
- Reiche, J.; Souza, C.M.; Hoekman, D.H.; Verbesselt, J.; Persaud, H.; Herold, M. Feature level fusion of multi-temporal ALOS PALSAR and Landsat data for mapping and monitoring of tropical deforestation and forest degradation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2159–2173. [Google Scholar] [CrossRef]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Zhang, J. Multi-source remote sensing data fusion: status and trends. Int. J. Image Data Fusion 2010, 1, 5–24. [Google Scholar] [CrossRef]
- Pohl, C.; Genderen, J.L. Van Multisensor image fusion in remote sensing: Concepts, methods and applications (Review article). Int. J. Remote Sens. 1998, 19, 823–854. [Google Scholar] [CrossRef]
- Strahler, A. H. The use of prior probabilities in maximum likelihood classification of remotely sensed data. Remote Sens. Environ. 1980, 10, 135–163. [Google Scholar] [CrossRef]
- Symeonakis, E.; Caccetta, P.; Koukoulas, S.; Furby, S.; Karathanasis, N.; Taylor, P. Multi-temporal land-cover classification and change analysis with conditional probability networks: The case of Lesvos Island (Greece). Int. J. Remote Sens. 2012, 33, 4075–4093. [Google Scholar] [CrossRef]
- Kiiveri, H.; Caccetta, P. Image fusion with conditional probability networks for monitoring the salinization of farmland. Digit. Signal Process. 1998, 230, 225–230. [Google Scholar] [CrossRef]
- Kiiveri, H. T.; Caccetta, P.; Evans, F. Use of conditional probability networks for environmental monitoring. Int. J. Remote Sens. 2001, 22, 1173–1190. [Google Scholar] [CrossRef]
- Lehmann, E.A.; Wallace, J.F.; Caccetta, P.A.; Furby, S.L.; Zdunic, K. Forest cover trends from time series Landsat data for the Australian continent. Int. J. Appl. Earth Obs. Geoinf. 2013, 21, 453–462. [Google Scholar] [CrossRef]
- Notarnicola, C. A bayesian change detection approach for retrieval of soil moisture variations under different roughness conditions. IEEE Geosci. Remote Sens. Lett. 2014, 11, 414–418. [Google Scholar] [CrossRef]
- Pierdicca, N.; Pulvirenti, L.; Bignami, C. Soil moisture estimation over vegetated terrains using multitemporal remote sensing data. Remote Sens. Environ. 2010, 114, 440–448. [Google Scholar] [CrossRef]
- Pierdicca, N.; Pulvirenti, L.; Pace, G. A prototype software package to retrieve soil moisture from Sentinel-1 data by using a bayesian multitemporal algorithm. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 153–166. [Google Scholar] [CrossRef]
- Eilander, D.; Annor, F.; Iannini, L.; van de, Giesen, N. Remotely sensed monitoring of small reservoir dynamics: A bayesian approach. Remote Sens. 2014, 6, 1191–1210. [Google Scholar] [CrossRef]
- Solberg, A.; Jain, A.; Taxt, T. Multisource classification of remotely sensed data: Fusion of Landsat TM and SAR images. IEEE Trans. Geosci. Remote Sens. 1994, 32, 768–778. [Google Scholar] [CrossRef]
- Bruzzone, L.; Prieto, D.F.; Serpico, S.B. A neural-statistical approach to multitemporal and multisource remote-sensing image classification. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1350–1359. [Google Scholar] [CrossRef]
- Solberg, R.; Huseby, R. Time-series fusion of optical and SAR data for snow cover area mapping. In Proceedings of the EARSeL Land Ice and Snow Special Interest Group Workshop, Berne, Switzerland, 22–24 September 2008.
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Vermote, E.F.; El Saleous, N.; Justice, C.O.; Kaufman, Y.J.; Privette, J.L.; Remer, L.; Roger, J.C.; Tanré, D. Atmospheric correction of visible to middle-infrared EOS-MODIS data over land surfaces: Background, operational algorithm and validation. J. Geophys. Res. 1997, 102, 17131–17141. [Google Scholar] [CrossRef]
- Masek, J.G.J.; Vermote, E.F.E.; Saleous, N.E.; Wolfe, R.; Hall, F.G.; Huemmrich, K.F.; Gao, F.; Kutler, J.; Lim, T. A landsat surface reflectance dataset for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett. 2006, 3, 68–72. [Google Scholar] [CrossRef]
- Schmidt, G.L.; Jenkerson, C.B.; Masek, J.; Vermote, E.; Gao, F. Landsat Ecosystem Disturbance Adaptive Processing System (LEDAPS) Algorithm Description. Avaialble online: https://pubs.er.usgs.gov/publication/ofr20131057 (accessed on 17 March 2015).
- Shimada, M.; Tadono, T.; Rosenqvist, A. Advanced Land Observing Satellite (ALOS) and monitoring global environmental change. Proc. IEEE 2010, 98, 780–799. [Google Scholar] [CrossRef]
- Werner, C.; Strozzi, T. Gamma SAR and interferometric processing software. In Proceeedings of the 2000 ERS-ENVISAT Symposium, Gothenburg, Sweden, 16–20 October 2000.
- Shimada, M.; Isoguchi, O.; Tadono, T.; Isono, K. PALSAR radiometric and geometric calibration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3915–3932. [Google Scholar] [CrossRef]
- Hoekman, D.H.; Vissers, M.A.M.; Wielaard, N. PALSAR wide-area mapping of Borneo: methodology and map validation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 605–617. [Google Scholar] [CrossRef]
- Quegan, S.; Yu, J.J. Filtering of multichannel SAR images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2373–2379. [Google Scholar] [CrossRef]
- Zeng, T.; Hu, C.; Quegan, S.; Uryu, Y.; Dong, X. Regional tropical deforestation detection using ALOS PALSAR 50 m mosaics in Riau province, Indonesia. Electron. Lett. 2014, 50, 547–549. [Google Scholar] [CrossRef]
- Lucas, R.; Armston, J.; Fairfax, R.; Fensham, R.; Accad, A.; Carreiras, J.; Kelley, J.; Bunting, P.; Clewley, D.; Bray, S.; et al. An Evaluation of the ALOS PALSAR L-band backscatter—Above ground biomass relationship Queensland, Australia: Impacts of surface moisture condition and vegetation structure. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 576–593. [Google Scholar] [CrossRef]
- Zhang, X.; Friedl, M.A.; Schaaf, C.B. Sensitivity of vegetation phenology detection to the temporal resolution of satellite data. Int. J. Remote Sens. 2009, 30, 2061–2074. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Browning, D.M.; Rango, A. A comparison of three feature selection methods for object-based classification of sub-decimeter resolution UltraCam-L imagery. Int. J. Appl. Earth Obs. Geoinf. 2012, 15, 70–78. [Google Scholar] [CrossRef]
- Venables, W.N.; Ripley, B.D. Modern Applied Statistics with S, 4th ed.; Springer: New York, NY, USA, 2002. [Google Scholar]
- Conover, W.J. Practical Nonparametric Statistics; John Wiley & Sons: New York, NY, USA, 1971. [Google Scholar]
- Stehman, S.V. Sampling designs for accuracy assessment of land cover. Int. J. Remote Sens. 2009, 30, 5243–5272. [Google Scholar] [CrossRef]
- Foody, G. Status of land cover classification accuracy assessment. Remote Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.M.; Stehman, S.V.; Woodcock, C.E. Making better use of accuracy data in land change studies: Estimating accuracy and area and quantifying uncertainty using stratified estimation. Remote Sens. Environ. 2013, 129, 122–131. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.; Herold, M. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Jin, S.; Sader, S.A. Comparison of time series tasseled cap wetness and the normalized difference moisture index in detecting forest disturbances. Remote Sens. Environ. 2005, 94, 364–372. [Google Scholar] [CrossRef]
- Kuplich, T.M. Classifying regenerating forest stages in Amazônia using remotely sensed images and a neural network. For. Ecol. Manage. 2006, 234, 1–9. [Google Scholar] [CrossRef]
- Sexton, J.O.; Noojipady, P.; Anand, A.; Song, X.-P.; McMahon, S.; Huang, C.; Feng, M.; Channan, S.; Townshend, J.R. A model for the propagation of uncertainty from continuous estimates of tree cover to categorical forest cover and change. Remote Sens. Environ. 2015, 156, 418–425. [Google Scholar] [CrossRef]
- Broich, M.; Hansen, M.C.; Potapov, P.; Adusei, B.; Lindquist, E.; Stehman, S.V. Time-series analysis of multi-resolution optical imagery for quantifying forest cover loss in Sumatra and Kalimantan, Indonesia. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 277–291. [Google Scholar] [CrossRef]
- Huang, C.; Goward, S.N.; Schleeweis, K.; Thomas, N.; Masek, J.G.; Zhu, Z. Dynamics of national forests assessed using the Landsat record: Case studies in eastern United States. Remote Sens. Environ. 2009, 113, 1430–1442. [Google Scholar] [CrossRef]
- Mitchell, A.L.; Tapley, I.; Milne, A.K.; Williams, M.L.; Zhou, Z.-S.; Lehmann, E.; Caccetta, P.; Lowell, K.; Held, A. C- and L-band SAR interoperability: Filling the gaps in continuous forest cover mapping in Tasmania. Remote Sens. Environ. 2014, 155, 58–68. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reiche, J.; De Bruin, S.; Hoekman, D.; Verbesselt, J.; Herold, M. A Bayesian Approach to Combine Landsat and ALOS PALSAR Time Series for Near Real-Time Deforestation Detection. Remote Sens. 2015, 7, 4973-4996. https://doi.org/10.3390/rs70504973
Reiche J, De Bruin S, Hoekman D, Verbesselt J, Herold M. A Bayesian Approach to Combine Landsat and ALOS PALSAR Time Series for Near Real-Time Deforestation Detection. Remote Sensing. 2015; 7(5):4973-4996. https://doi.org/10.3390/rs70504973
Chicago/Turabian StyleReiche, Johannes, Sytze De Bruin, Dirk Hoekman, Jan Verbesselt, and Martin Herold. 2015. "A Bayesian Approach to Combine Landsat and ALOS PALSAR Time Series for Near Real-Time Deforestation Detection" Remote Sensing 7, no. 5: 4973-4996. https://doi.org/10.3390/rs70504973
APA StyleReiche, J., De Bruin, S., Hoekman, D., Verbesselt, J., & Herold, M. (2015). A Bayesian Approach to Combine Landsat and ALOS PALSAR Time Series for Near Real-Time Deforestation Detection. Remote Sensing, 7(5), 4973-4996. https://doi.org/10.3390/rs70504973