
Polarimetric Calibration of CASMSAR P-Band Data Affected by Terrain Slopes Using a Dual-Band Data Fusion Technique

Abstract
:
1. Introduction


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency | Polarization | Baseline | Ground Resolution | Incidence Angle | |
|---|---|---|---|---|---|
| X | 9.6 GHz | HH | 2.198 m | 0.5/1.0/2.5/5.0 m | 37°–63° |
| P | 600 MHz | HH, HV, VH, VV | N/A | 1.0/2.5/5.0 m | 33°–53° |
2. Polarimetric Distortion Affected by Reflection Asymmetry
3. Polarimetric Calibration Using the POAS
3.1. Deriving an a priori POAS

3.2. Derivation of the Calibration Model
- (1)
- Reciprocity SHV = SVH, which is the distributed targets’ constant physical property for a monostatic system.
- (2)
- Reflection symmetry 〈Sij×Sji〉= 0, which implies that the true co-pol and cross-pol returns are uncorrelated, unless the target’s orientation angle is changed.
3.3. The Crosstalk and Cross-Pol Channel Imbalance Estimation
3.4. The Co-Pol Channel Imbalance Estimation
3.5. The Relation among the Proposed Method, Quegan Method and Ainsworth Method
4. The Proposed PolCAL Scheme
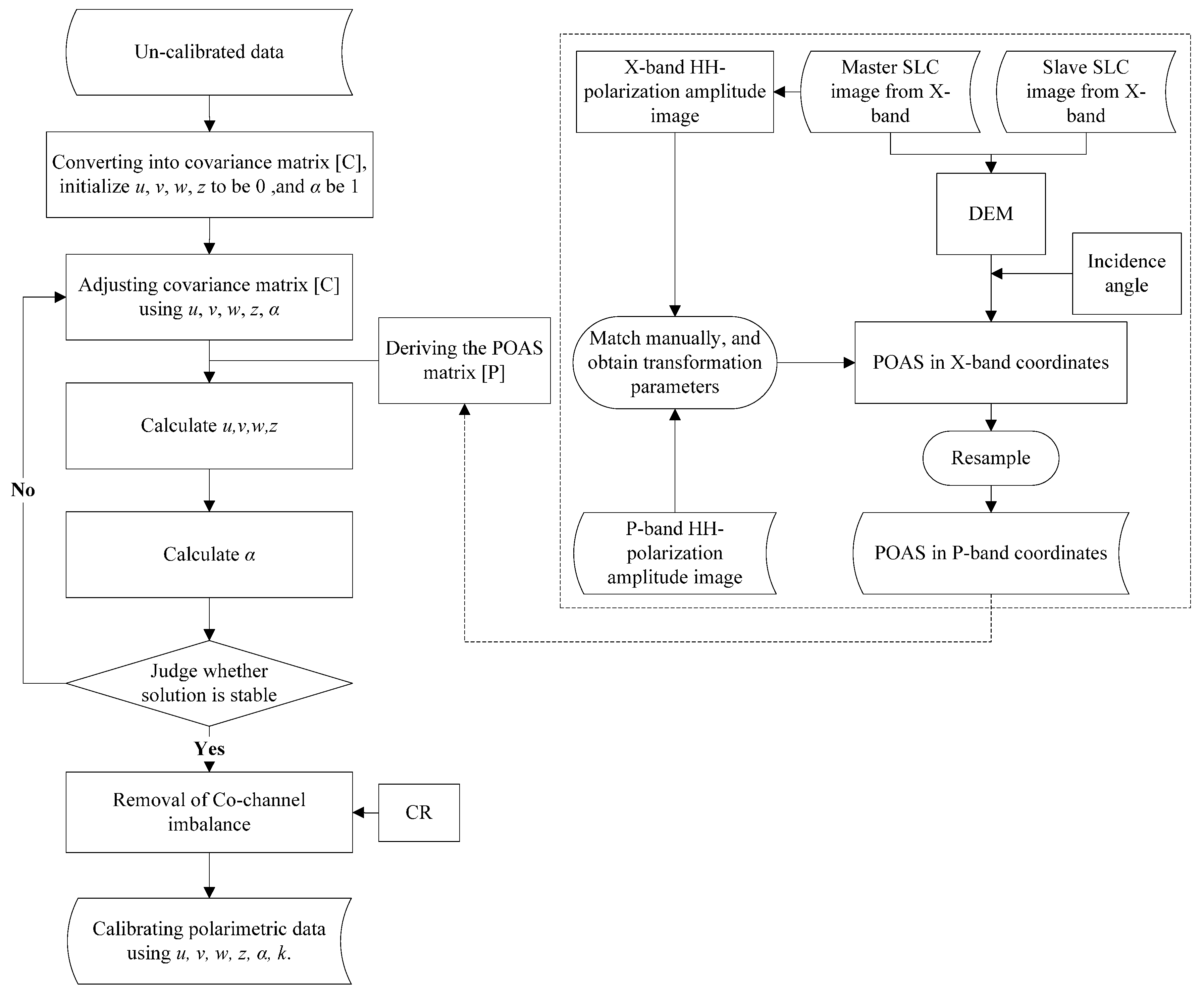
4.1. Process of Deriving the POAS

4.2. Solving the Crosstalk and Cross-Pol Channel Imbalance
5. Experiments
5.1. Result and Evaluation of Deriving the POAS

| GCPs | #1 | #2 | #3 | #4 | #5 | #6 | #7 | #8 | #9 | #10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Error in x | 0.0033 | −0.0203 | 0.0316 | −0.0159 | −0.0033 | −0.0047 | 0.0028 | 0.0000 | −0.0001 | −0.0000 |
| Error in y | 0.0041 | −0.0255 | 0.0397 | −0.0200 | −0.0041 | −0.0059 | 0.0035 | 0.0000 | −0.0001 | −0.0000 |
| RMSE | 0.0052 | 0.0325 | 0.0507 | 0.0255 | 0.0053 | 0.0076 | 0.0045 | 0.0000 | 0.0001 | 0.0000 |
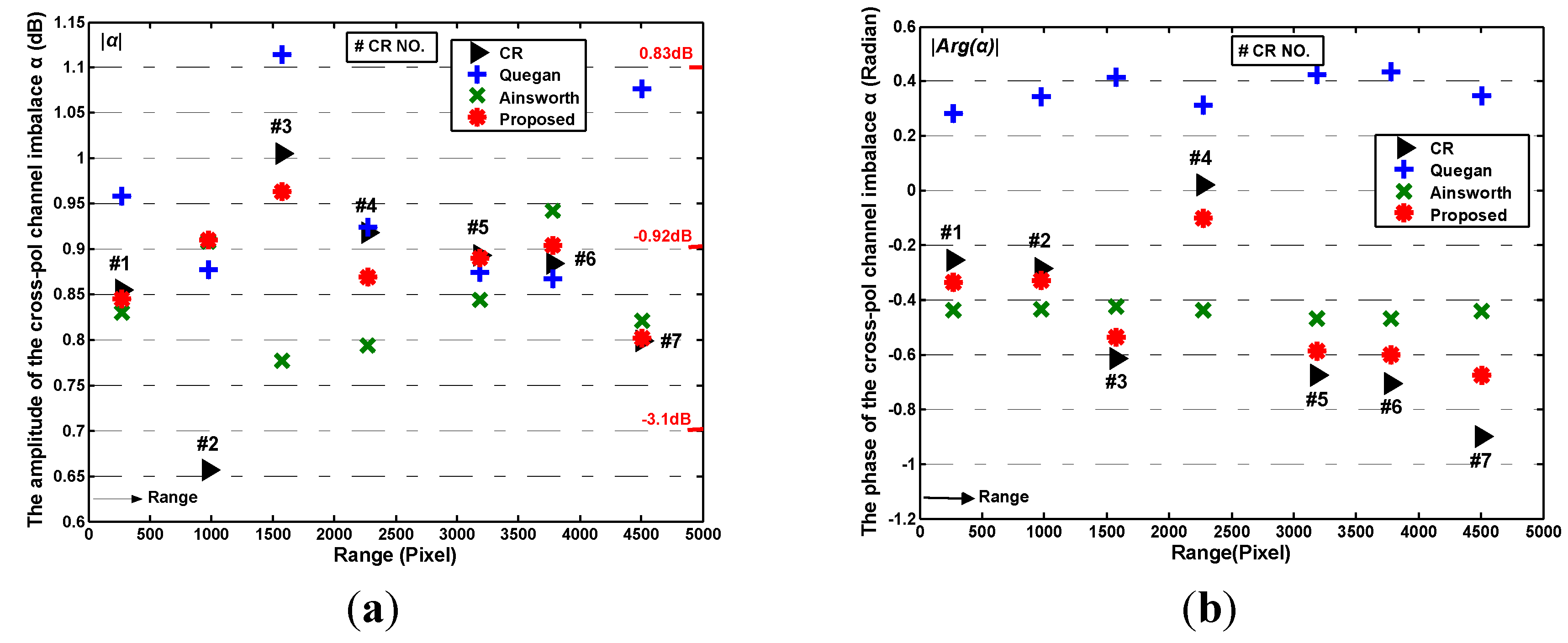
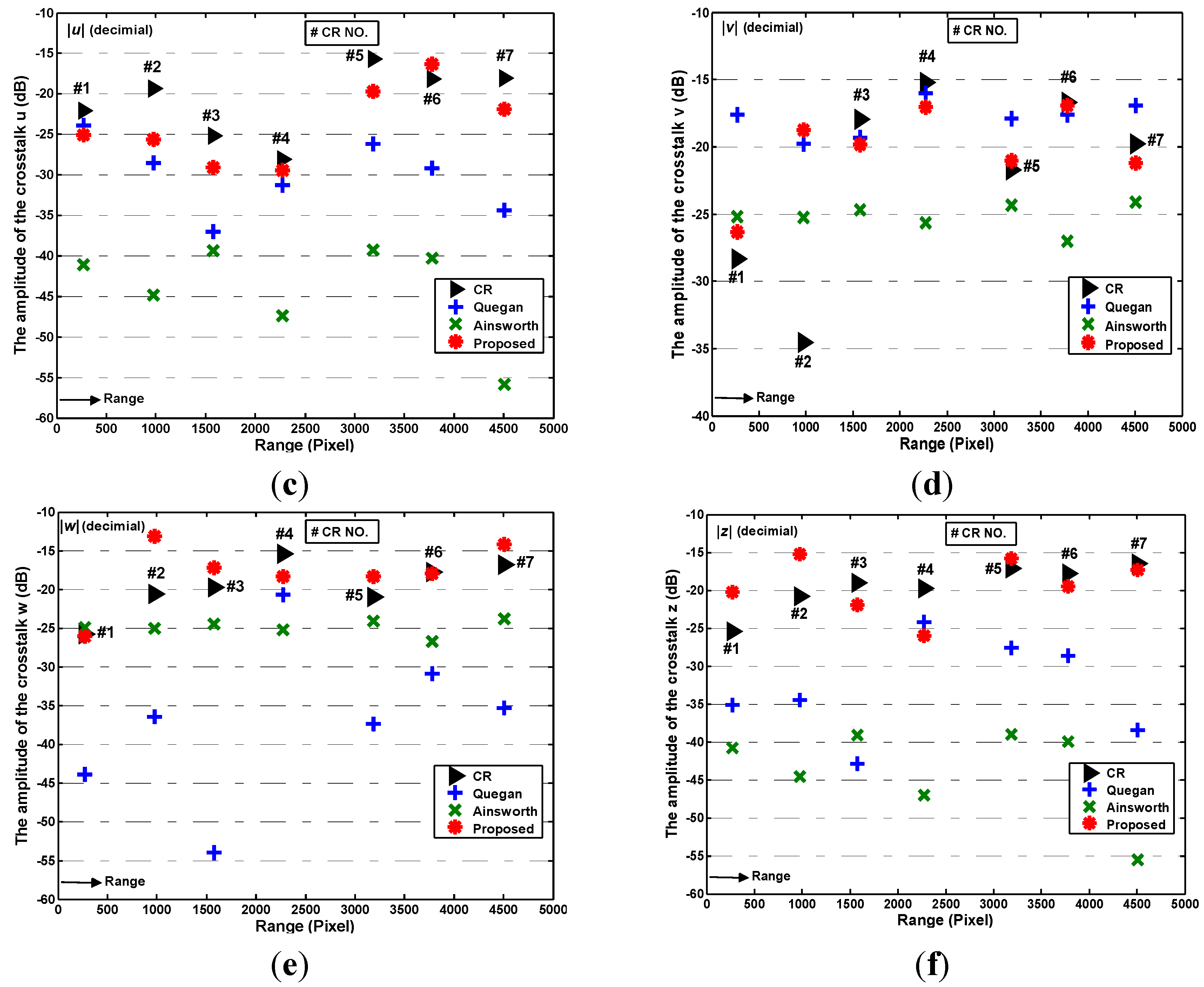
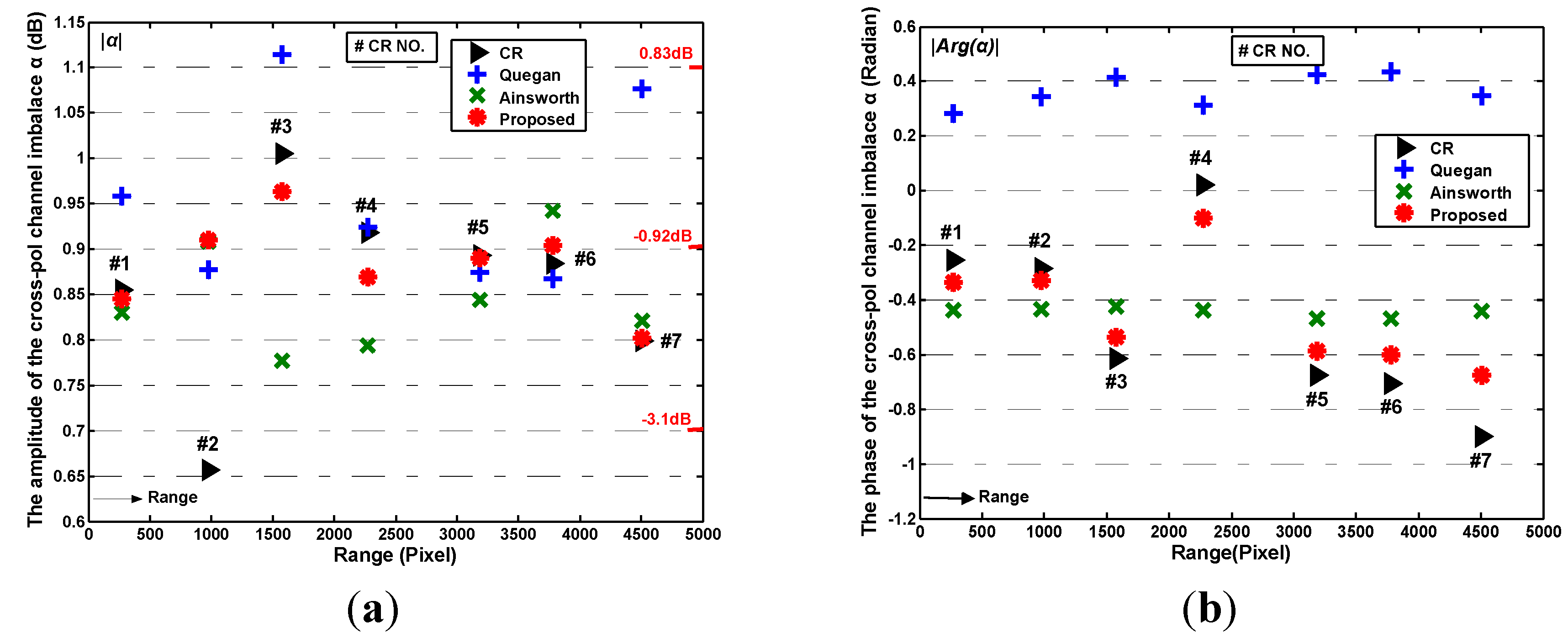
5.2. Result and Evaluation of the Crosstalk and Cross-Pol Channel Imbalance Estimation

| CR # | #1 | #2 | #3 | #4 | #5 | #6 | #7 |
|---|---|---|---|---|---|---|---|
| Pauli RGB |  |  |  |  |  |  |  |
| Land cover | Bare soil | Bare soil/Cropland | Bare soil/Cropland | Bare soil/Cropland | Grass/Bare soil/ | Cropland/Bare soil | Bare soil/Buildings |
| Slope in range | 0.7797 | 4.8756 | 1.0164 | 3.0743 | −18.8959 | −4.2253 | −22.3820 |
| Slope in azimuth | −16.3805 | −24.8712 | −13.7515 | −1.5374 | −10.0782 | −6.7942 | 16.3032 |
| Incidence | 26.6873 | 30.0453 | 32.9338 | 36.2631 | 40.6462 | 43.4772 | 46.9358 |
| POAS | −33.9289 | −47.3621 | −24.8353 | −2.7980 | −11.0384 | −9.1259 | 16.1233 |
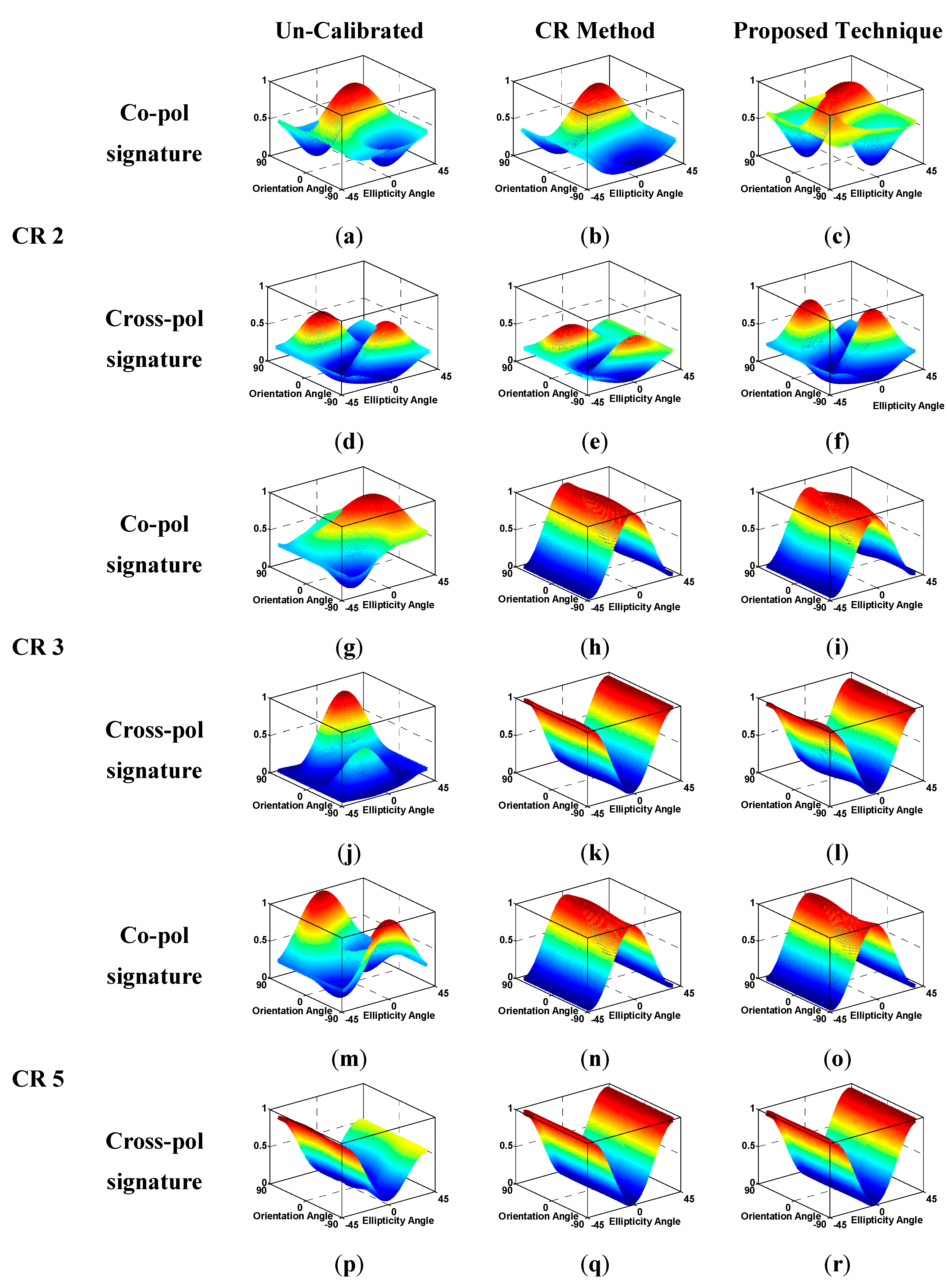
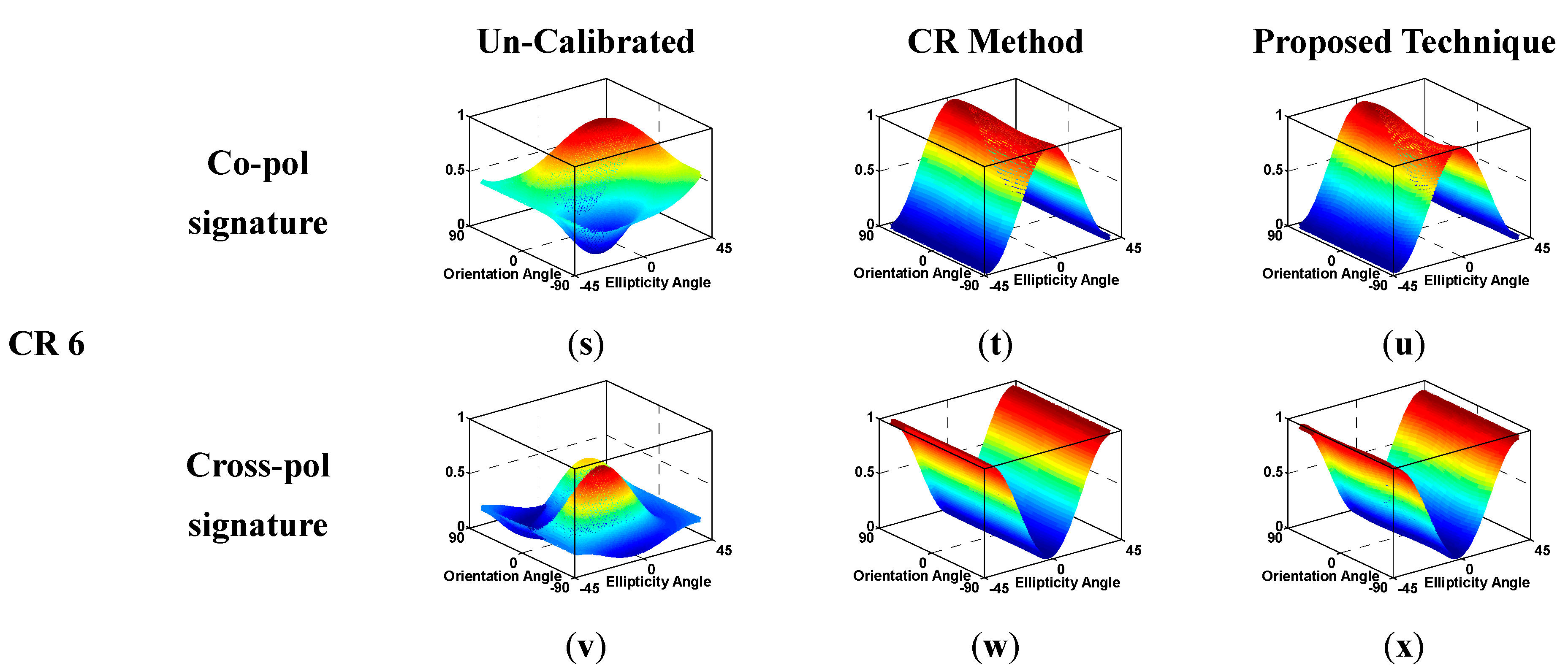
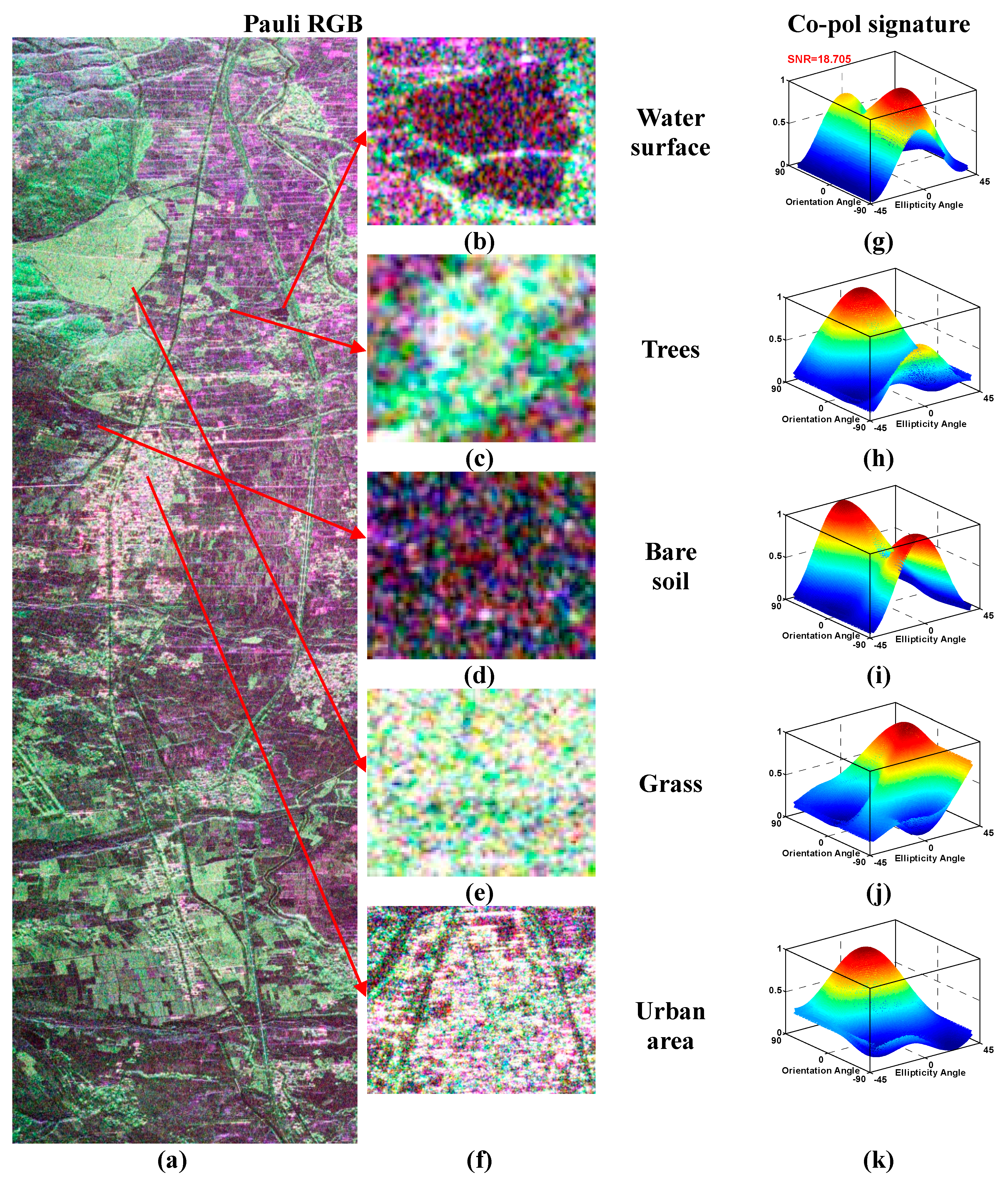
5.3. Polarimetric Signature Response


6. Discussion

7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Freeman, A. SAR calibration: An overview. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1107–1121. [Google Scholar] [CrossRef]
- Freeman, A.; van Zyl, J.J.; Klein, J.D.; Zebker, H.A.; Shen, Y. Calibration of stokes and scattering matrix format polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1992, 30, 531–539. [Google Scholar] [CrossRef]
- Quegan, S. A unified algorithm for phase and cross-talk calibration of polarimetric data-theory and observations. IEEE Trans. Geosci. Remote Sens. 1994, 32, 89–99. [Google Scholar] [CrossRef]
- Klein, J.D. Calibration of complex polarimetric SAR imagery using backscatter correlations. IEEE Trans. Aerosp. Electron. Syst. 1992, 28, 183–194. [Google Scholar] [CrossRef]
- Sarabandi, K. Calibration of a polarimetric synthetic aperture radar using a known distributed target. IEEE Trans. Geosci. Remote Sens. 1994, 32, 575–582. [Google Scholar] [CrossRef]
- Shimada, M. Model-based polarimetric SAR calibration method using forest and surface-scattering targets. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1712–1733. [Google Scholar] [CrossRef]
- Shimada, M.; Freeman, A. A technique for measurement of spaceborne SAR antenna patterns using distributed targets. IEEE Trans. Geosci. Remote Sens. 1995, 33, 100–114. [Google Scholar] [CrossRef]
- Zink, M.; Rosich, B. Antenna elevation pattern estimation from rain forest acquisitions. In Proceedings of CEOS Working Group on Calibration/Validation—SAR Workshop, London, UK, 24–26 September 2002.
- Attema, E.; Brooker, G.; Buck, C.; Desnos, Y.-L.; Emiliani, L.; Geldsthorpe, B.; Laur, H.; Laycock, J.; Sanchez, J. ERS-1 and ERS-2 antenna pattern estimates using the Amazon Rain Forest. In Proceedings of CEOS SAR Workshop RADARSAT Data Quality, Saint-Hubert, QC, Canada, 4–6 February 1997.
- Van Zyl, J.J. Calibration of polarimetric radar images using only image parameters and trihedral corner reflector responses. IEEE Trans. Geosci. Remote Sens. 1990, 28, 337–348. [Google Scholar] [CrossRef]
- Sarabandi, K.; Pierce, L.E.; Ulaby, F.T. Calibration of a polarimetric imaging SAR. IEEE Trans. Geosci. Remote Sens. 1992, 30, 540–549. [Google Scholar] [CrossRef]
- Christensen, E.L.; Skou, N.; Dall, J.; Woelders, K.W.; Jorgensen, J.H.; Granholm, J.; Madsen, S.N. EMISAR: An absolutely calibrated polarimetric l- and c-band SAR. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1852–1865. [Google Scholar] [CrossRef]
- Horn, R.; Scheiber, R.; Buckreuss, S.; Zink, M.; Moreira, A.; Sansosti, E.; Lanari, R. E-SAR generates level-3 SAR Products for ProSmart. In Procedings of the Geoscience and Remote Sensing Symposium, IEEE 1999 International, Hamburg, Germany, 28 June–2 July 1999.
- Satake, M.; Kobayashi, T.; Uemoto, J.; Umehara, T.; Kojima, S.; Matsuoka, T.; Nadai, A.; Uratsuka, S. Polarimetric calibration of PI-SAR2. In Proceedings of the 2013 Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), Tsukuba, Japan, 23–27 September 2013.
- Touzi, R.; Shimada, M. Polarimetric PALSAR calibration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3951–3959. [Google Scholar] [CrossRef]
- Matsuoka, T.; Umehara, T.; Nadai, A.; Kobayashi, T.; Satake, M.; Uratsuka, S. Calibration of the high performance airborne SAR system (PI-SAR2). In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2009), Cape Town, South Africa, 12–17 July 2009.
- Satake, M.; Matsuoka, T.; Umehara, T.; Kobayashi, T.; Nadai, A.; Uemoto, J.; Kojima, S.; Uratsuka, S. Calibration experiments of advanced x-band airborne SAR system, PI-SAR2. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Seoul, Korea, 24–29 July 2011.
- D’Aria, D.; Ferretti, A.; Monti Guarnieri, A.; Tebaldini, S. SAR calibration aided by permanent scatterers. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2076–2086. [Google Scholar] [CrossRef]
- Iannini, L.; Tebaldini, S.; Guarnieri, A.M. Long term relative polarimetric calibration by natural targets. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, Australia, 21–26 July 2013.
- Zhang, J.; Zhao, Z.; Huang, G.; Lu, Z. CASMSAR: An integrated airborne SAR mapping system. Photogramm. Eng. Remote Sens. 2012, 78, 1110–1114. [Google Scholar]
- Zhang, J.; Wang, Z.; Huang, G.; Zhao, Z.; Lu, L. CASMSAR: The first Chinese airborne SAR mapping system. In Proceedings of the Earth Observing Systems XV, San Diego, CA, USA, 3–5 August 2010.
- Zhang, J.; Cheng, C.; Huang, G. Block adjustment of POS-supported airborne SAR images. In Proceedings of the International Radar Symposium, IRS 2011, Leipzig, Germany, 7–9 September 2011.
- Huang, G.; Yang, S.; Wang, N.; Zhang, J.; Zhao, Z. Block combined geocoding of airborne InSAR with sparse GCPs. Acta Geod. Cartogr. Sin. 2013, 42, 397–403. [Google Scholar]
- Zhao, Z.; Zhang, J.; Huang, G.; Hua, F.; Yang, S.; Deng, S. High-resolution airborne SAR interferometry mapping application in Huashan Mountain. In Proceedings of the 2010 Second IITA International Conference on Geoscience and Remote Sensing (IITA-GRS), Qingdao, China, 28–31 August 2010.
- Yang, S.; Huang, G.; Zhao, Z. A method for generation of SAR stereo model with image simulation. Geomat. Inf. Sci. Wuhan Univ. 2012, 37, 1325–1328. [Google Scholar]
- Lee, J.S.; Schuler, D.L.; Ainsworth, T.L.; Krogager, E.; Kasilingam, D.; Boerner, W.M. On the estimation of radar polarization orientation shifts induced by terrain slopes. IEEE Trans. Geosci. Remote Sens. 2002, 40, 30–41. [Google Scholar] [CrossRef]
- Gail, W.B. Effect of Faraday rotation on polarimetric SAR. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 301–307. [Google Scholar] [CrossRef]
- Wright, P.A.; Shuan, Q.; Wheadon, N.S.; Hall, C.D. Faraday rotation effects on l-band spaceborne SAR data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2735–2744. [Google Scholar] [CrossRef]
- Ainsworth, T.L.; Ferro-Famil, L.; Lee, J.S. Orientation angle preserving a posteriori polarimetric SAR calibration. IEEE Trans. Geosci. Remote Sens. 2006, 44, 994–1003. [Google Scholar] [CrossRef]
- Kimura, H. Calibration of polarimetric PALSAR imagery affected by Faraday rotation using polarization orientation. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3943–3950. [Google Scholar] [CrossRef]
- Lee, J.S.; Schuler, D.L.; Ainsworth, T.L. Polarimetric SAR data compensation for terrain azimuth slope variation. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2153–2163. [Google Scholar] [CrossRef]
- Shi, L.; Yang, J.; Li, P. Co-polarization channel imbalance determination by the use of bare soil. ISPRS J. Photogramm. Remote Sens. 2014, 95, 53–67. [Google Scholar] [CrossRef]
- Zhang, H.; Lu, W.; Zhang, B.; Chen, J.; Wang, C. Improvement of polarimetric SAR calibration based on the Ainsworth algorithm for Chinese airborne POLSAR data. IEEE Geosci. Remote Sens. Lett. 2013, 10, 898–902. [Google Scholar] [CrossRef]
- Xing, S.-Q.; Dai, D.-H.; Liu, J.; Wang, X.-S. Comment on “orientation angle preserving a posteriori polarimetric SAR calibration”. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2417–2419. [Google Scholar] [CrossRef]
- Freeman, A. Effects of Noise on Polarimetric SAR Data. In Proceedings of the 13th Annual International Geoscience and Remote Sensing Symposium, Tokyo, Japan, 18–21 August 1993.
- Zhang, J.; Lin, X. Semi-automatic extraction of straight roads from very high resolution remotely sensed imagery by a fusion method. Sens. Lett. 2013, 11, 1229–1235. [Google Scholar] [CrossRef]
- Zhang, J. Trends in geo-information fusion for the next 5 years. Int. J. Image Data Fusion 2014, 5. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, L.; Yang, J.; Li, P.; Hua, F. Polarimetric Calibration of CASMSAR P-Band Data Affected by Terrain Slopes Using a Dual-Band Data Fusion Technique. Remote Sens. 2015, 7, 4784-4803. https://doi.org/10.3390/rs70404784
Liao L, Yang J, Li P, Hua F. Polarimetric Calibration of CASMSAR P-Band Data Affected by Terrain Slopes Using a Dual-Band Data Fusion Technique. Remote Sensing. 2015; 7(4):4784-4803. https://doi.org/10.3390/rs70404784
Chicago/Turabian StyleLiao, Lu, Jie Yang, Pingxiang Li, and Fenfen Hua. 2015. "Polarimetric Calibration of CASMSAR P-Band Data Affected by Terrain Slopes Using a Dual-Band Data Fusion Technique" Remote Sensing 7, no. 4: 4784-4803. https://doi.org/10.3390/rs70404784
APA StyleLiao, L., Yang, J., Li, P., & Hua, F. (2015). Polarimetric Calibration of CASMSAR P-Band Data Affected by Terrain Slopes Using a Dual-Band Data Fusion Technique. Remote Sensing, 7(4), 4784-4803. https://doi.org/10.3390/rs70404784