1. Introduction
Remote sensing is becoming an increasingly indispensable tool in ecology and conservation biology [
1,
2,
3,
4], with growing traction particularly in forest monitoring. The opening of the U.S. Geological Survey’s Landsat archive, which harbours more than 2 million satellite images of the Earth’s surface dating back to 1972 [
5], has revolutionised standards for the availability of Earth observation data and helped to facilitate the rise of forests as today’s most common large-area monitoring target [
6]. Airborne light detection and ranging (LiDAR) technologies that emit laser pulses to obtain information in three dimensions, along with associated developments in LiDAR analytical techniques, have improved capacities to measure forest stand structure [
7] and facilitated the production of high-resolution aboveground carbon density maps [
8,
9,
10]. Very High Resolution (VHR) products (e.g., aerial photos, IKONOS, GeoEye, QuickBird) can feature sub-meter spatial resolutions that allow for the delineation of complex spatial heterogeneities in forest structure based on multi-scale segmentation [
11] or texture-based [
12,
13] analytical approaches. The launch of many new Earth observation systems, greater access to their products, and the continued development of computational technologies for remotely sensed data are supporting satellite imagery-based global forest-cover analyses at ever higher spatial, temporal, and thematic resolutions, and testify to sustained progress in remote sensing-based forest monitoring today [
14,
15].
However, a number of challenges still impede the more widespread use of remote sensing technologies for natural resource monitoring, two of which we address here. First, end-users in natural resource monitoring fields may lack a technical understanding of remotely sensed datasets and their associated analyses, and thus rely upon remote sensing scientists to design and implement remote sensing-based projects [
16,
17]. The high level of expertise necessary to handle remotely sensed data and products is considered an outstanding challenge facing today’s ecologists and conservation biologists that has limited their ability to take full advantage of remote sensing technologies as real assets [
18]. Secondly, globally (or even regionally) consistent maps of land-cover change remain unavailable because of a lack of consensus on appropriate analytical approaches [
6]. Conservation planning, which often requires information on processes that occur over a range of scales, is a field for which broadly consistent data layer coverage is of high importance [
19]. Indeed, the success of increasing numbers of international and national habitat monitoring systems today directly depends upon efficient and long-term biodiversity monitoring at the habitat and landscape levels [
18,
20].
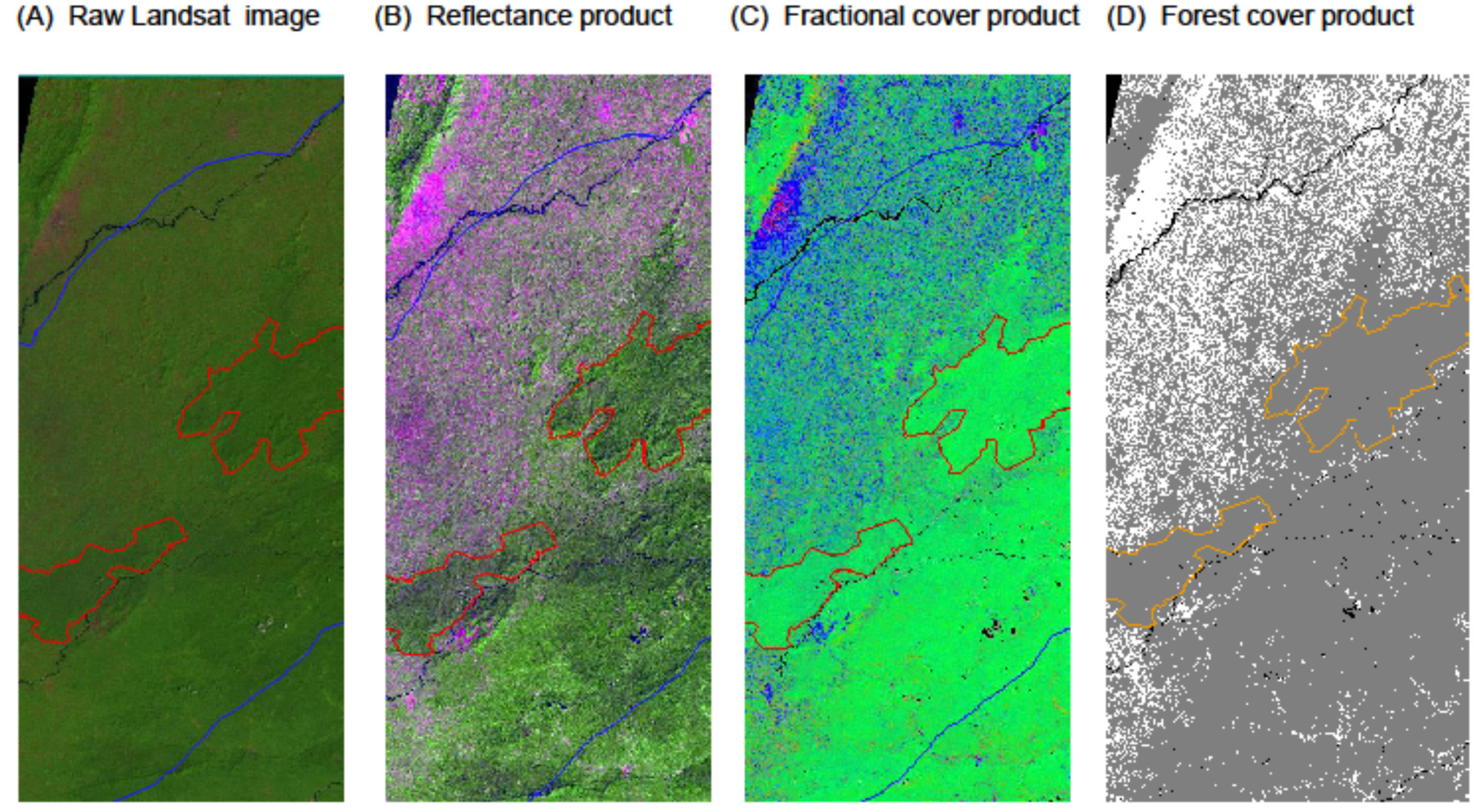
Two of the most recent technologies that have emerged in the field of remote sensing for forest monitoring address these challenges of inaccessibility to non-expert users and limited availability of globally consistent products. The Carnegie Landsat Analysis System lite (CLASlite) is a semi-automated analysis environment in which users can process radiometric data from nine different satellite systems—including the Landsat series—to produce maps of deforestation and forest disturbance. CLASlite administers the following semi-automated central functions to achieve such products: (1) Image calibration of raw satellite imagery to apparent surface reflectance; (2) fractional cover analysis of surface reflectance data into proportional estimates of photosynthetic and non-photosynthetic vegetation cover as well as bare substrate using an Automated Monte Carlo Unmixing (AutoMCU) model that draws from a representative library of reflectance spectra; (3) forest-cover classification of fractional cover data based on proportional cover of photosynthetic vegetation and bare substrate; and (4) change detection between multi-temporal fractional cover data to determine deforestation and forest disturbance over time (
Figure A1). CLASlite’s AutoMCU spectral mixture analysis algorithm is reported to be capable of detecting changes in forest cover in increments as small as 1% of a Landsat pixel, which corresponds to roughly 10 m
2 [
21]. Thus, CLASlite offers the potential to overcome current challenges in detecting cryptic forms of tropical forest degradation such as surface fire and sub-canopy disturbances that often occur at such smaller scales [
22]. The CLASlite software package became globally and freely available in December 2013; individuals may download CLASlite upon completion of an online training course [
23]—the world’s first for deforestation and forest degradation mapping—that is specifically designed to empower those with limited training in remote sensing. CLASlite users have already demonstrated CLASlite’s suitability for analysing deforestation and logging in tropical regions [
24,
25,
26].
The second product, the Global Forest Change dataset (GFCD), was made available for free public download in February 2014 and is the first medium- to high-resolution (30 m) downloadable data product detailing global forest extent, loss, and gain from 2000–2012 [
27]. The GFCD is based on time-series analyses of 654,178 growing season scenes captured by the Enhanced Thematic Mapper Plus (ETM+) spectrometer on board the Landsat 7 satellite and processed in parallel using the Google Earth Engine cloud environmental analysis platform. Each Landsat scene used in the GFCD is a computationally generated mosaic of cloud-free 30 m × 30 m Landsat pixels. Considering all vegetation taller than 5 m in height as trees and defining forest loss as the removal of all trees within a pixel, the GFCD stratified pixels from Landsat growing season data into <25%, 26%–50%, 51%–75%, and 76%–100% tree-cover (in year 2000) classes and quantified the area of forest lost from 2000–2012 within each tree-cover class. Per-band metrics employed by the GFCD to characterise forest cover and change included pixel reflectance and mean reflectance values at maximum, minimum, and selected percentile values over time. Data used to train the Landsat metrics were derived from high spatial-resolution data (e.g., QuickBird imagery) and various existing percent tree cover datasets. Validation for accuracy was performed against reference change data obtained from image interpretation of time-series Landsat, Moderate Resolution Imaging Spectroradiometer (MODIS), and high spatial-resolution Google Earth™ imagery, as well as reference canopy height change LiDAR data obtained from NASA’s Geoscience Laser Altimetry System (GLAS) instrument on board the IceSat-1 satellite [
27]. As a “globally consistent and locally relevant” record of forest change [
27], the GFCD forms the basis of Global Forest Watch, a freely available forest monitoring and alerting database with demonstrated impacts on timely conservation action and response [
28].
It is clear that both CLASlite and the GFCD harbour not only valuable utility in modern forest conservation efforts, but also the immediate potential to remove some of the barriers preventing remote sensing technologies from fully integrating with conservation communities. However, because both CLASlite and the GFCD are both relatively nascent technologies, opportunities to assess their relative capacities to classify land cover and monitor forest dynamics remain. Comparing the classification abilities of CLASlite and the GFCD is of critical importance given the array of new land-cover data, products, and tools that are available—and still being developed—today. No single technology will be optimal for all applications; rather, its suitability will depend heavily upon the requirements of the user with respect to, for example, thematic coverage, and spatial and temporal detail [
29]. Because CLASlite and the GFCD differ with respect to these features as well as their inherent methodological and analytical frameworks, it is of special interest to investigate the ways in which these differences might afford either forest monitoring technology certain advantages over the other when assessing the dynamics of complex forested landscapes in ways that are meaningful to conservationists. Especially relevant to conservation studies today are technologies that can differentiate natural mature forest from mature tree growth with obvious anthropogenic origins, such as palm plantations. Technologies with the ability to make this distinction would be vital resources for zero net deforestation targets, which value both the protection of native forests and the planting of new ones, and zero gross deforestation targets, which are particularly concerned with gross loss of forest area over time and broadly aim for no deforestation anywhere [
30]. Remote sensing technologies that can map tree plantations separately from native forests will also contribute to more effective monitoring and a greater understanding of the impacts of land conversion due to growth in commercial agriculture [
31,
32], and critically inform carbon credit schemes such as the United Nation’s Reducing Emissions from Deforestation and Forest Degradation (REDD) Programme [
33,
34].
To deepen our assessment of the relative utilities of CLASlite and GFCD in forest monitoring, we further compared their classification abilities with those of supervised classification, a more established and traditional pixel-based land classification technique. Supervised classification is predicated upon user knowledge of the realities of a given study site; clusters of training pixels in a satellite image that are representative of any number of user-defined land-cover categories of interest are first identified by the user, then used to train a specified classification algorithm to locate and identify similar pixels in the remainder of the image [
35]. While the
a priori input of information has been identified as the main disadvantage of the supervised approach due to its potentially difficult, subjective, and time-consuming nature [
36], the site-specific scope of our study as well as our use of high-resolution Google Earth™ imagery to promote the accurate identification of training pixels (see
Section 2.3 for more detailed methodology) mitigated these concerns. Other common classification methods such as unsupervised classification and object based image analysis (OBIA) were considered less optimal for this study when compared with the supervised approach. Unsupervised classification, in which a classification algorithm is used to automatically assign image pixels into a user-defined number of classes, still requires significant post-classification labelling and has been shown to produce suboptimal results when compared to supervised classification [
37]. Meanwhile, OBIA involves segmenting an image into clusters of neighbouring pixels—or “objects”—that share similar spectral properties (
i.e., digital values) as well as other semantically significant properties (e.g., size, shape, geography) [
38]. However, OBIA is considered a more appropriate tool when segmenting and extracting features from VHR data, in which pixels are substantially smaller than the objects of classification interest (e.g., individual tree crowns) [
39]. Not only are per-pixel based classification methods such as supervised classification considered more appropriate when using Landsat imagery [
40], as was the case with our study, but supervised land classification is also considered a classic and the most widely used quantitative land-cover mapping approach [
41,
42]—a ubiquity which further supported our decision to employ supervised classification as a representative traditional classification approach, against which the more contemporary classification technologies of CLASlite and the GFCD could be compared.
In this study, we tested the inherent abilities of these three classification methodologies—supervised classification, CLASlite and the GFCD—to create accurate forest cover and change maps for a region of Sierra Leone in West Africa which included Gola Rainforest National Park (hereafter Gola) since 2000. We expected that the different classification approaches fundamentally employed by the three methods would result in disparate map products, and aimed to ascertain the extent to which these differences reflected a greater utility of one approach over the others when monitoring forest dynamics over Gola. To quantify relative utility among these three classification approaches, we used the metric of extent of agreement between the predicted forest cover and loss maps generated by each of the three tools, and independently identified truth regions of forest cover and loss over the Gola area. The assessed value of each land classification approach was also heavily dependent upon its ability to make the difficult yet critical distinction between mature natural forest and mature anthropogenic plantations/agricultural areas, which is a growing urgency in the conservation sciences today. Thus, another key aim of our study was to create a methodology to test the ways in which the different classification algorithms and outputs inherent in the given framework of each classification approach (e.g., the binary forest/non-forest maps of CLASlite and the GFCD versus maps of any user-defined number of classes from the supervised classification) would be able to achieve this task.
4. Discussion
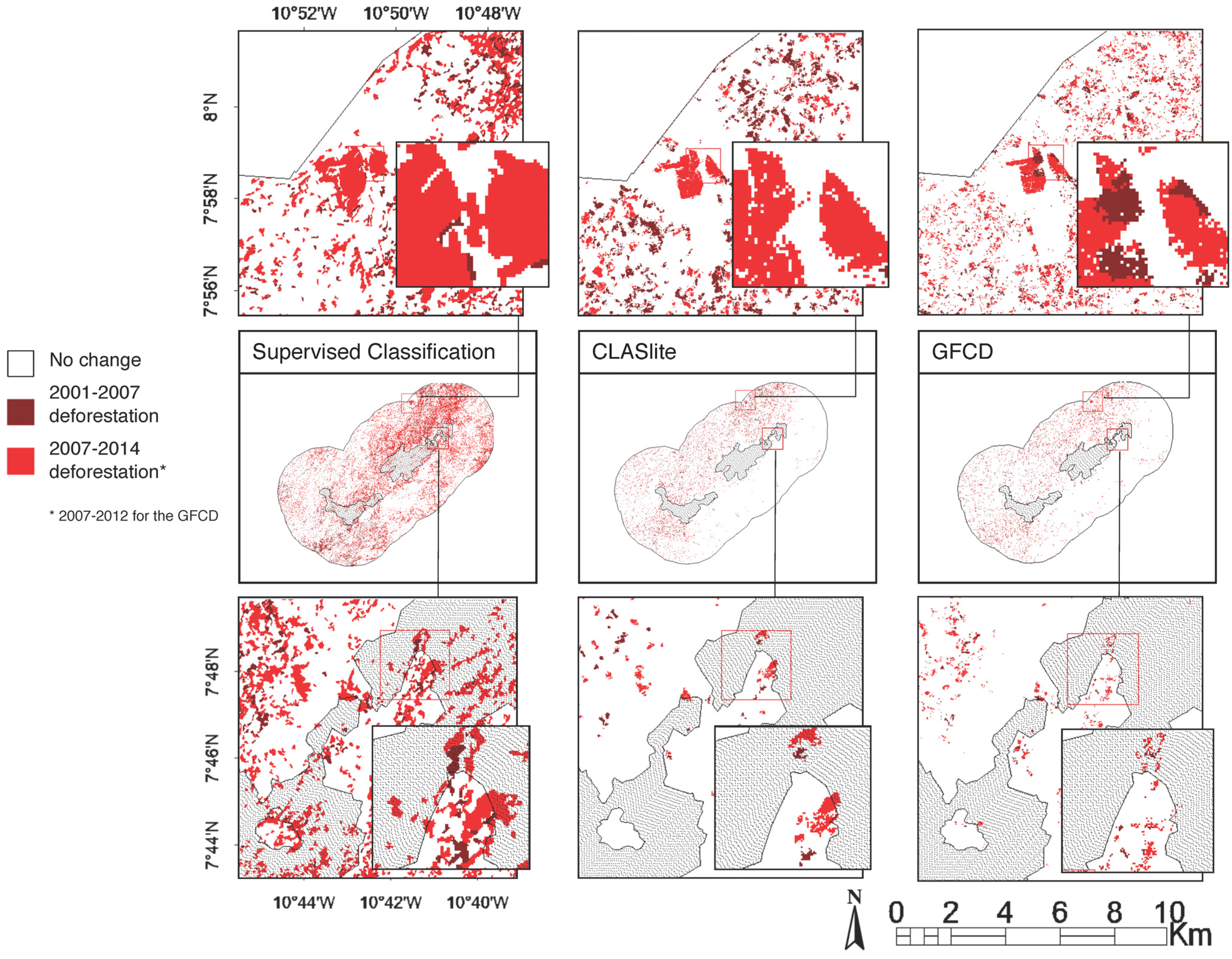
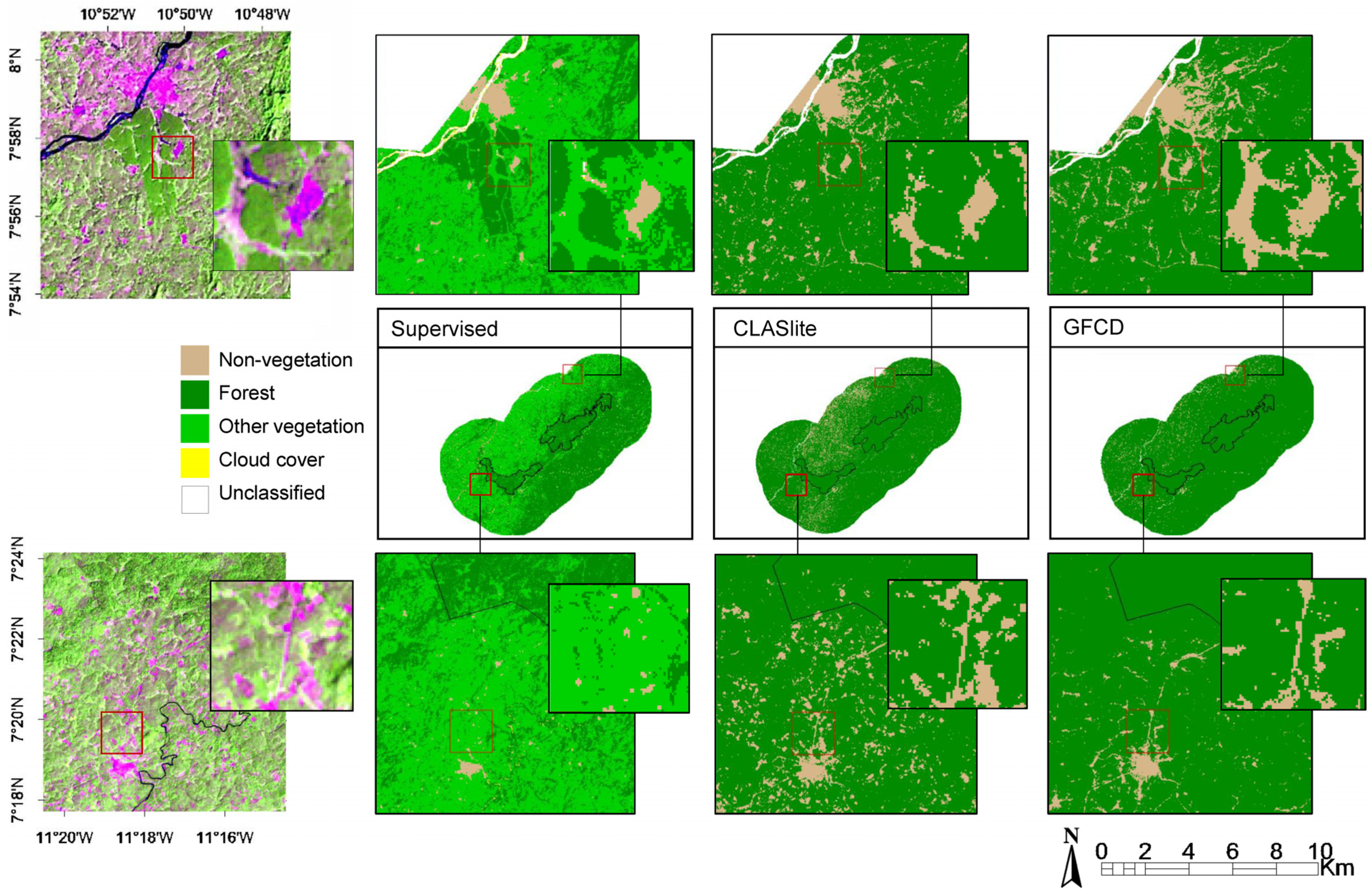
The land cover and change maps generated by the three distinct classification approaches over Gola and its surrounding region shared many similarities. Areas identified as having been deforested by all three approaches had a high degree of correspondence with true deforestation on the ground (see relatively high user’s accuracies for the deforestation categories,
Table A4), indicating that the generated maps can serve as credible tools for tracking deforestation events. Direct visual interpretations of the change maps also offer useful preliminary insights into the spatial distributions of deforestation across the region. For instance, deforestation surrounding Gola since 2000 has been greater in Sierra Leone than in neighbouring Liberia to the immediate southeast (central panels of
Figure 2), while all maps indicate the presence of encroachment across the boundary of Gola’s northern extension (bottom panels of
Figure 2). Both of these findings can be used to inform the mobilisation of targeted ground-level conservation action in the region.
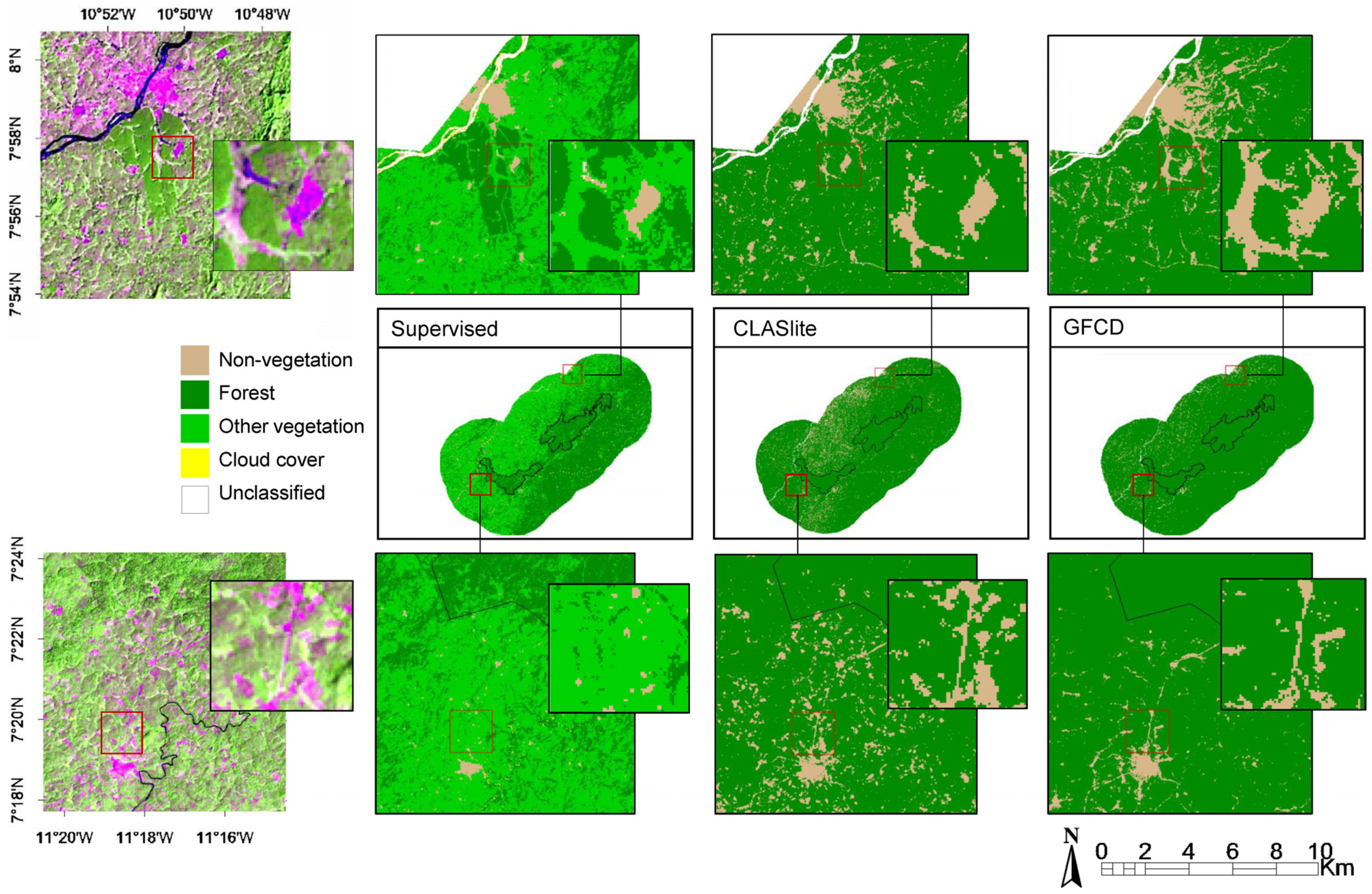
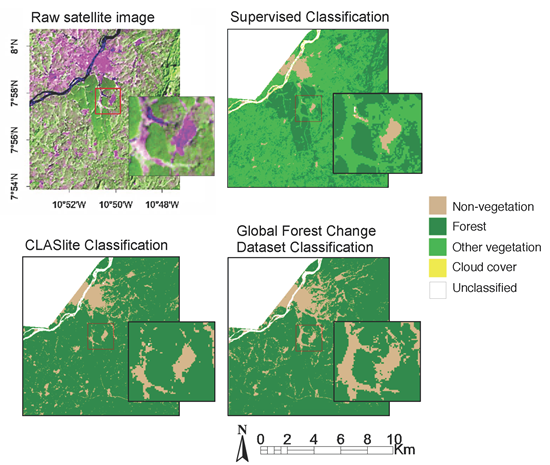
Critically, all three classification approaches employed in this study also exhibited difficulties in delineating anthropogenic from natural tree stands to some extent. At least 50% of other vegetation truth pixels were classified as forest by all three classification approaches, which influenced declines in the overall accuracies of the classified map products (
Table 2,
Table A3). We expected each of the classification approaches to exhibit at least some classification confusion surrounding this other vegetation class; as a catchment category of sorts for all vegetation other than mature natural forest, it encompassed a diverse array of vegetation types. We also expected this confusion because of known difficulties in using classification approaches based on information from optical sensors to distinguish mature natural forests from plantations, which may be spectrally similar to each other but structurally and functionally different. Still, remote sensing technologies that can distinguish natural forests from planted forests are of high value for conservationists. Thus, a primary aim of our study was to determine which classification approach employed here could best handle this classification challenge, and which of its unique features allowed it do so.
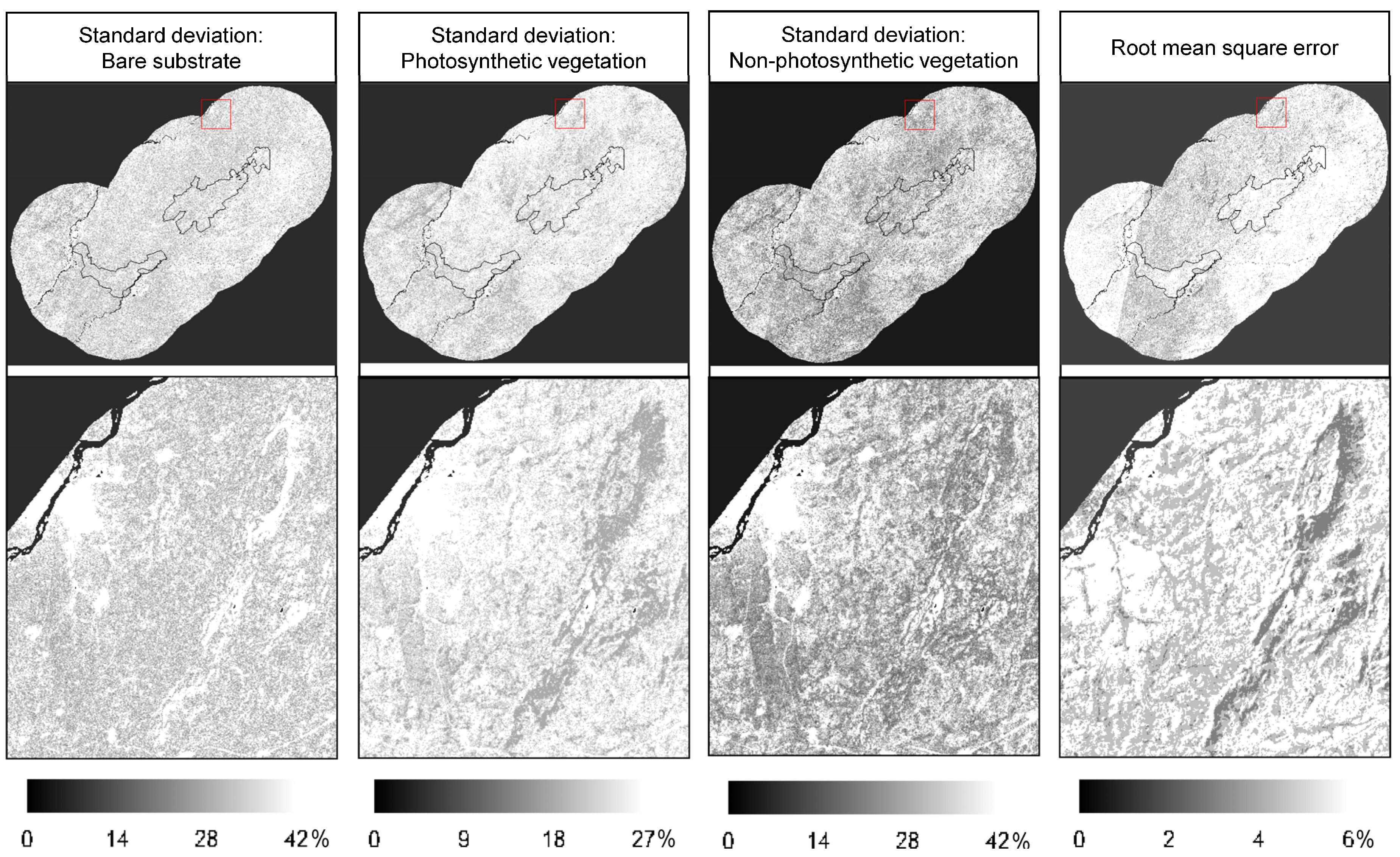
To this end, we found that, of the three classification tools employed in this study, CLASlite not only produced the most accurate land-cover and land cover-change products overall (
Table 2,
Table A4), but also was more adept at classifying other vegetation (inclusive of palm plantations and agricultural crop land) as non-forest rather than mature forest, especially in direct comparison with the GFCD (
Table 2). Of the classification methodologies studied here, CLASlite featured the most robust sub-pixel analytical framework, an indication that the nature and extent of biophysical information that a classification method identifies at the sub-pixel level is a fundamental determinant of its capacity to discriminate planted from natural mature forest. CLASlite’s AutoMCU algorithm captures the sub-pixel spectral characteristics of an individual pixel by drawing from a vast spectral endmember library to first guess the reflectance spectra of three constituent endmembers (photosynthetic vegetation, non-photosynthetic vegetation, and bare substrate), and then assign fractional cover values to each of the three endmembers within the pixel (
Figure A1(C)) [
24]. In so doing, CLASlite attempts to account for the likelihood that each pixel has a heterogeneous composition, and consequent decisions on whether a pixel is interpreted as forest or non-forest are based on the degree to which the relative fractional covers of the pixel’s constituent endmembers meet certain user-defined thresholds. A previous study of forest degradation in Indonesian Borneo demonstrated that these thresholds can in fact be altered to exclude certain vegetation types (e.g., younger oil palm and timber plantations) from being classified by CLASlite as forest, as such plantations in the study area were found to be associated with pixels featuring greater percentages of bare substrate than pixels of natural forest [
26]. Our study supports this claim that CLASlite’s more robust sub-pixel analytical approach is capable of discerning natural tree stands from planted tree stands—at least to a greater extent than the GFCD, and within the context of the Gola landscape.
In contrast, sub-pixel biophysical measurements were more limited in the GFCD product. Pixels in the GFCD dataset were considered at the sub-pixel level to the extent that a pixel was assigned a fractional tree cover endmember value from 0 to 1. However, we found that this percent tree cover-based definition of forest had limited success in discerning between natural and planted forest in this study; of the three classification approaches, the GFCD categorised the greatest percentage of other vegetation truth regions as forest (
Table 2). Attempting to distinguish natural from planted forest based on tree cover can be problematic when plantations might feature tree cover extents that are comparable with that of natural forests. While this distinction is certainly not one of which the GFCD has claimed to be capable [
56], it is still a limitation to the application of the GFCD in conservation studies that has been previously noted [
57], and that our study corroborates. Although agreed-upon forest definitions in fact are commonly based on percent forest cover [
30], our study indicates that such a discrete classification scheme, based on mutual exclusivity in which attempts are made to define natural forest by a single tree cover threshold, may not be particularly useful when attempting to differentiate natural from planted forests.
Supervised classification also utilised a sub-pixel analytical framework to a lesser extent than CLASlite, mirroring its more limited capacity to classify pixels that exist at the ambiguous boundaries of discrete land classes. The supervised classification approach employed here involved training a Maximum Likelihood classifier algorithm to first recognise particular spectral patterns as representative of certain user-defined land-cover classes of interest, then classify unknown pixels into one of the land-cover classes based on the likelihood of that pixel’s spectral signature falling within a normal distribution of the spectral values of a particular land class. Supervised classification’s binning of a pixel into one of several user-defined land classes based on overall spectral profile may fail to capture the more nuanced biophysical meaning behind a pixel, and such classification schemes may also substantially bypass land-change processes such as forest degradation that tend to be heterogeneous on finer, sub-pixel scales [
58,
59]. Moreover, dividing continuous quantitative information, such as those found in satellite images, into a finite number of discrete land classes that are considered at the outset to be exhaustively defined and mutually exclusive may lend itself to the further loss of information [
60]. Such techniques may fail to accurately detect and separate “edge pixels,” for example, that exist near the spectral boundaries of different classes [
16,
61] as well as pixels that exhibit high reflectance variability [
62]. An additional constraint can be imposed when spectral signals from the land area represented by a pixel are influenced by signals from immediately surrounding pixels [
63]. These considerations are especially relevant to our study of the Gola landscape, which features a complex and spectrally diverse mosaic of forested and vegetated land having experienced varying degrees of disturbance and recovery [
43].
Understanding the biophysical underpinnings of each classification methodology’s approach to sub-pixel measurements leads to an ontologically-based interpretation of CLASlite’s greater accuracy in classifying land cover and change over Gola when compared to the other approaches. Ontologies are agreements about shared conceptualisations [
64], and ontological biases in remote sensing can arise from differences in the ways in which data terms are conceptualised, such that land-cover information becomes inherently relative and indeterminate [
65]. Each of the three classification maps from this study was a product of different definitions of “forest” and, by extension, “non-forest.” “Forest” pixels in CLASlite were pixels that met user-assigned thresholds in photosynthetic vegetation and bare substrate fractional spectral signatures. The GFCD approach used in this study to generate forest-cover maps defined “forest” as pixels with >50% canopy closure for all vegetation taller than 5 m. Supervised classification defined forest as pixel clusters, separate in spectral space from other pixel clusters, that shared spectral similarities with a set of pre-assigned “truth” pixels representing forested areas in reality. Each of the classified products generated from this study and based on these diverse definitions of “forest” were subject to varying degrees of agreement errors with independently assigned truth pixels. However, CLASlite’s advantage stemmed from its encapsulation of a single pixel’s heterogeneity, allowing for an ontological interpretation of forest pixels that aligns most closely with the biophysical reality of naturally occurring phenomena often comprising spectra from more than one ground material [
66]. Meanwhile, the GFCD’s more liberal ontology of what constitutes a forest has already been criticised for its conflation of tropical forests with monoculture plantations and even tall herbaceous crops [
57]. Inconsistencies in land-cover nomenclature are broadly recognised as main barriers to forest monitoring strategies [
67], and our exploration of how the technical differences among the classification techniques used in this study can be reinterpreted as ontological differences largely underscore this claim. Our study importantly illustrates that understanding the semantics of land-cover categories in any classification methodology is a critical prerequisite to understanding the nature of the land-cover products that can be derived from them.
Finally, it is likely that the relatively high flexibility in parameter setting afforded to the user by CLASlite allowed for the generation of a more superior classified map product over Gola. The GFCD is an already processed and packaged forest cover and change product. ENVI’s supervised classification approach, in contrast, allows for some degree of user input via the selection of the classifier algorithm (e.g., Maximum Likelihood, Minimum Distance, Mahalanobis Distance) used to assign individual pixels to land-cover categories, in addition to the setting of image “clean-up” parameters, which involved image smoothing (
i.e., reclassifying pixels with the majority class value of their surrounding pixels to remove “salt-and-pepper” effects) and aggregation (
i.e., merging very small and isolated pixel clusters with adjacent, larger regions). In fact, the CLASlite approach included similar image clean-up parameters in the form of artefact removal and pixel aggregation options (
Table A2). The option of controlling the degree to which “salt-and-pepper” effects are removed as they pertain to a given study area can greatly influence the nature of the maps generated; by increasing edge densities and creating smaller blocks of any vegetation class [
68], salt-and-pepper effects can contribute to the over-segmentation of an image [
62], and thus reducing them through the use of filters [
52,
61,
69] can reduce mis-registration errors [
70]. However, among other parameter alterations, the CLASlite approach also critically allowed the user to define exact threshold levels for fractional photosynthetic vegetation and bare substrate values when determining forest cover (
Table A2). Understandably, the option to define exactly what is considered forest and non-forest based on the local realities of a given study site facilitates the production of classified land cover and change maps that are better tailored to the area of interest.
Our study indicates that CLASlite’s analytical framework as is was able to best distinguish natural from planted tree stands over Gola. Thus, CLASlite as it stands has the potential to serve as a suitable remotely sensed data analysis tool for informing REDD, zero deforestation, high carbon stock forest, and other related policies that might rely upon this very distinction. However, it is important to consider the ways in which the accuracy metrics of the classified CLASlite product as well as the analytical capacities of the CLASlite technology itself can be further improved and extended. For example, it would be of interest to run a separate classifier on CLASlite’s intermediate fractional cover product to quantify threshold values for the three photosynthetic vegetation, non-photosynthetic vegetation, and bare substrate endmembers that would allow for the distinction of more land-cover classes beyond CLASlite’s forest/non-forest binary. Such analyses would certainly extend CLASlite’s capabilities of provisioning map products with even greater site relevance. More thorough interpretations of natural
versus anthropogenic influences on forest cover and change might also be achieved by further classifying the forest cover and change CLASlite products based on factors that would likely influence human accessibility to forested areas, such as distance to roads, travel time from nearest city, and topographic features [
25], or interpreting CLASlite products alongside remotely sensed radar data, which have been shown to discriminate oil palm plantations from forest stands with high accuracy [
33]. Although the GFCD product as applied within the framework of our study was not the most optimal of the land-cover classification tools employed, the product itself still harbours opportunities for extended analyses as well. While the ramifications of the GFCD’s dependence on percent tree cover in defining forest have been explored (notably in [
57]), it is perhaps the GFCD’s core identity as a percent tree cover product that lends itself to a wealth of extended and more tailored reinterpretations. For example, sensitivity analyses could be conducted to determine specific percent tree cover thresholds that would allow the GFCD product to distinguish certain vegetation types of interest given a particular landscape. Thus, the revolutionary powers of CLASlite and the GFCD as modern remote sensing technologies lie not only in the fact that they are free for public download and dissemination, and thus can empower vast groups of individuals to conduct informative forest monitoring research, but also in their status as compelling tools that offer vast opportunities for extended applications in a variety of contexts.
6. Conclusion
Given the array of new remotely sensed land-cover data, products, and analytical tools that are available—and still being developed—today, critical assessments of the relatively utility of these technologies for forest monitoring efforts are essential. Especially important for conservationists hoping to employ remote sensing tools is the need for technologies that can differentiate natural from planted mature forest. In this study, we explored the ways in which various definitions, assumptions, and algorithms inherent in three optical remote sensing-based land-classification methods, including two of the most recent technologies to have emerged in the field of remote sensing for forest monitoring, affected their land-cover and land cover-change classification abilities for a region of tropical forest in Sierra Leone, West Africa. We found that the CLASlite forest monitoring tool produced forest cover and change maps with greater quantified accuracies than a traditional supervised classification approach and one using the Global Forest Change dataset, and was able to also make the critical distinction between mature planted forest and mature natural forest to a greater extent than the other two approaches. The advantages of CLASlite largely derived from its ability to draw from a vast library of spectral endmembers to robustly resolve spectral signatures beyond the level of the discrete pixel, thus acknowledging the true spectral heterogeneity of forested areas, as well as its greater incorporation of user-defined parameter values. These factors afforded CLASlite the greater capacity to generate forest cover and change maps that held more local relevance than those derived from the other two classification approaches. Moreover, CLASlite features the additional benefit of encouraging a less centralised approach to forest monitoring by empowering conservation and resource policy communities with the tools necessary to perform this task themselves. Overall, by exploring the suite of land cover and change classification products that can result from applying various remote sensing tools for forest monitoring purposes, our study demonstrates the importance of process-oriented, rather than purely product-oriented, approaches to land classification. In other words, the mechanisms and processing chains utilised by various classification technologies, and the ways in which these differences materialise in generated map products, must be fully understood before remote sensing tools are applied to inform our understanding of ecological phenomena and conservation-related initiatives. Finally, we take this opportunity to emphasise the outstanding value in novel technologies such as CLASlite and the GFCD, both of which serve as robust, foundational tools with demonstrated and ever-growing capacities to advance the field of remote sensing for forest monitoring.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}