Global Land Cover Mapping: A Review and Uncertainty Analysis

 ,
,  , ,
, , 
Abstract
:
1. Introduction
- (1)
- To intensively review these previous global land cover mapping projects to determine what lessons can be learned for future mapping projects.
- (2)
- To perform an uncertainty analysis using an error budgeting approach of the mapping methods used to produce the spatial distribution of land cover types for these previous global mapping projects to better prepare for future projects.
2. Methods

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GLC 2000 | Glob Cover 2009 | IGBP | UMD | |
|---|---|---|---|---|
| 1 | Tree Cover, broadleaved, evergreen | Closed to open (>15%) broadleaved evergreen or semi-deciduous forest (>5 m) | Evergreen Broadleaf Forests | Evergreen Broadleaf Forests |
| 2 | Tree Cover, broadleaved, deciduous, closed | Closed (>40%) broadleaved deciduous forest (>5 m) | Deciduous Broadleaf Forests | Deciduous Broadleaf Forests |
| 3 | Tree Cover, broadleaved, deciduous, open | Open (15%–40%) broadleaved deciduous forest/woodland (>5 m) | ||
| 4 | Tree Cover, needle-leaved, evergreen | Closed (>40%) needle leaved evergreen forest (>5 m) | Evergreen Needle leaf Forests | Evergreen Needle leaf Forests |
| 5 | Tree Cover, needle-leaved, deciduous | Open (15%–40%) needle leaved deciduous or evergreen forest (>5 m) | Deciduous Needle leaf Forests | Deciduous Needle leaf Forests |
| 6 | Tree Cover, mixed leaf type | Closed to open (>15%) mixed broadleaved and needle leaved forest (>5 m) | Mixed Forests | Mixed Forests |
| 7 | Tree Cover, regularly flooded, fresh water | |||
| 8 | Tree Cover, regularly flooded, saline water | |||
| 9 | Mosaic: Tree Cover/other natural vegetation | Mosaic grassland (50%–70%)/forest or shrub land (20%–50%) | Grasslands | Grasslands |
| Mosaic Forest/Shrubland (50%–70%)/Grassland (20%–50%) | ||||
| 10 | Tree Cover, burnt | |||
| 11 | Shrub Cover, closed–open, evergreen | Closed to open (>15%) (broadleaved or needle leaved, evergreen or deciduous) shrub land (<5 m) | Closed shrub lands | Closed Bush lands or Shrub lands |
| Open shrub lands | Open shrub lands | |||
| 12 | Shrub Cover, closed–open, deciduous | Wooded Grasslands/shrub lands | ||
| 13 | Herbaceous Cover, closed–open | Closed to open (>15%) herbaceous vegetation (grassland, savannas or lichens/mosses) | Woody savannas | Woodlands |
| 14 | Sparse Herbaceous or sparse Shrub Cover | Sparse (<15%) vegetation (woody vegetation, shrubs, grassland) | Savannas | |
| 15 | Regularly flooded Shrub and/or Herbaceous Cover | Closed to open (>15%) grassland or woody vegetation on regularly flooded or waterlogged soil—Fresh, brackish or saline water | Permanent Wetlands | |
| Closed (>40%) broadleaved forest or shrub land permanently flooded—Saline or brackish | ||||
| Closed to open (>15%) broadleaved forest regularly flooded (semi-permanently or temporarily)—Fresh or brackish water | ||||
| 16 | Cultivated and managed areas | Post-flooding or irrigated croplands (or aquatic) | Croplands | |
| 17 | Mosaic: Cropland/Tree Cover/other natural vegetation | Rain fed croplands | Cropland/Natural Vegetation Mosaics croplands | Croplands |
| 18 | Mosaic: Cropland/Shrub or Grass Cover | Mosaic cropland (50%–70%)/vegetation (20%–50%) | ||
| Mosaic vegetation (50%–70%)/cropland (20%–50%) | ||||
| 19 | Bare areas | Bare areas | Barren | Barren |
| 20 | Water bodies | Water bodies | Water bodies | Water bodies |
| 21 | Snow and Ice | Permanent snow and ice | Snow and Ice | |
| 22 | Artificial surfaces and associated areas | Artificial surfaces and associated areas (Urban areas > 50%) | Urban and Built-up | Urban and Built-up |
3. Results
3.1. Summary of Global Land Cover Mapping Databases
| IGBP | UMD | GLC 2000 | GlobCover 2009 | ||
|---|---|---|---|---|---|
| Producer | USGS, UNL, JRC | UMD | JRC | ESA | |
| Sensor | AVHRR | AVHRR | SPOT VEGETATION-1 | ENVISAT MERIS | |
| Input Data | Primary Input Data | Monthly global NDVI composites | 41 temporal metrics from spectral bands and NDVI | 4 spectral bands and NDVI | 13 Spectral Bands and NDVI composites |
| Collection Date | April 1992–March 1993 | April 1992–March 1993 | November 1999—December 2000 | January 2009—December 2009 | |
| Ancillary Data | DEM Atlases of ecoregion, soils, vegetation Land cover maps | Landsat MSS images | Radar DMSP Elevation Data (ETOPO5) | Altimeter Corrected Elevations (Getasse 30) | |
| Spatial Resolution | 1 km | 1 km | 1 km | 300 m | |
| Preprocessing | Projection | Goode Homolosine Equal Area projection | Goode Homolosine Equal Area projection | Lat-Lon | Lat-Lon |
| Geometric Correction | Geo-registered to Goode Homolosine equal area projection | Geo-registered to Goode Homolosine equal area projection | Ortho-rectification with ETOPO5, resampled by bi-cubic convolution | Level 1B data corrected into Level 3 Mosaics using AMORGOS tool | |
| Atmospheric Correction | Reduce atmospheric contamination and decrease off-nadir viewing effects by NDVI composition | Atmospherically corrected for ozone and Rayleigh scattering and solar zenith angle | Cloud screening Reduce Abrupt signal drops | Cloud screening Rayleigh scattering & Aerosol correction | |
| Classification | Number of Classes | 17 | 14 | 22 | 22 |
| Training Sites | N/A | 37,249 training sites | N/A | Unknown | |
| Classification Scheme | IGBP scheme | IGBP scheme | LCCS | LCCS | |
| Classification Method | Unsupervised clustering with post-classification refinement | Supervised Decision tree | Unsupervised classification with ISODATA algorithm | Per-pixel supervised (urban and wetland) and unsupervised | |
| Processing Sequence | Continent-by-continent | Global | Region by region | Global | |
| Accuracy Assessment | Validation Method | Statistical validation | None | Statistical Validation | Statistical Validation |
| Sampling Method | Stratified random sampling by classes | Two-stage stratified clustered sampling | Stratified random sampling by classes | ||
| Reference Data | Landsat TM and Spot images | Landsat TM and Spot images | Reference dataset | ||
| Accuracy of Cropland | Cropland: 85.7% Cropland/natural vegetation mosaic: 56.5% | 76% | |||
| Total Accuracy | 66.9% | 68.6% | 67.5% | ||
| Web | [34] | [10] | [12] | [14] | |
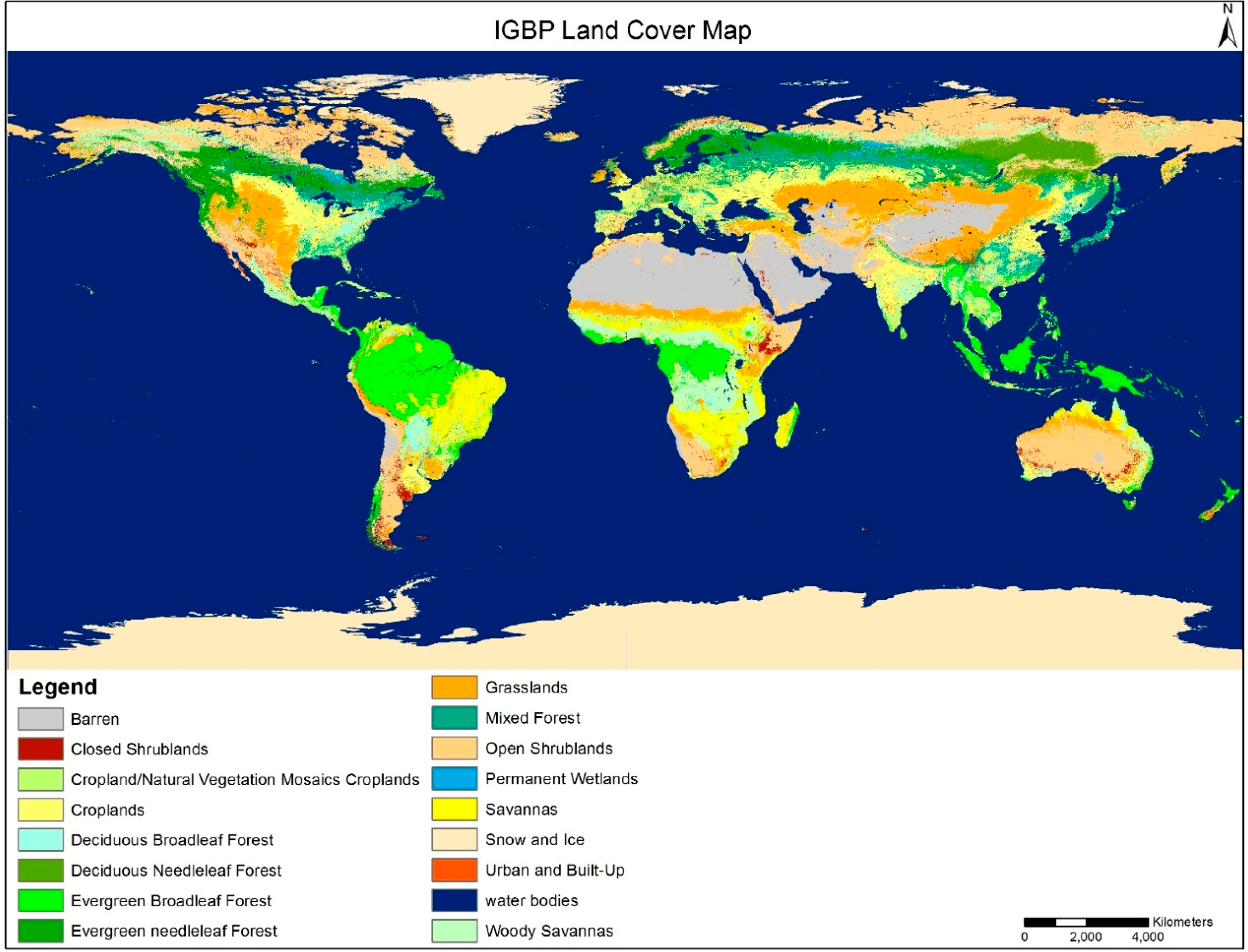
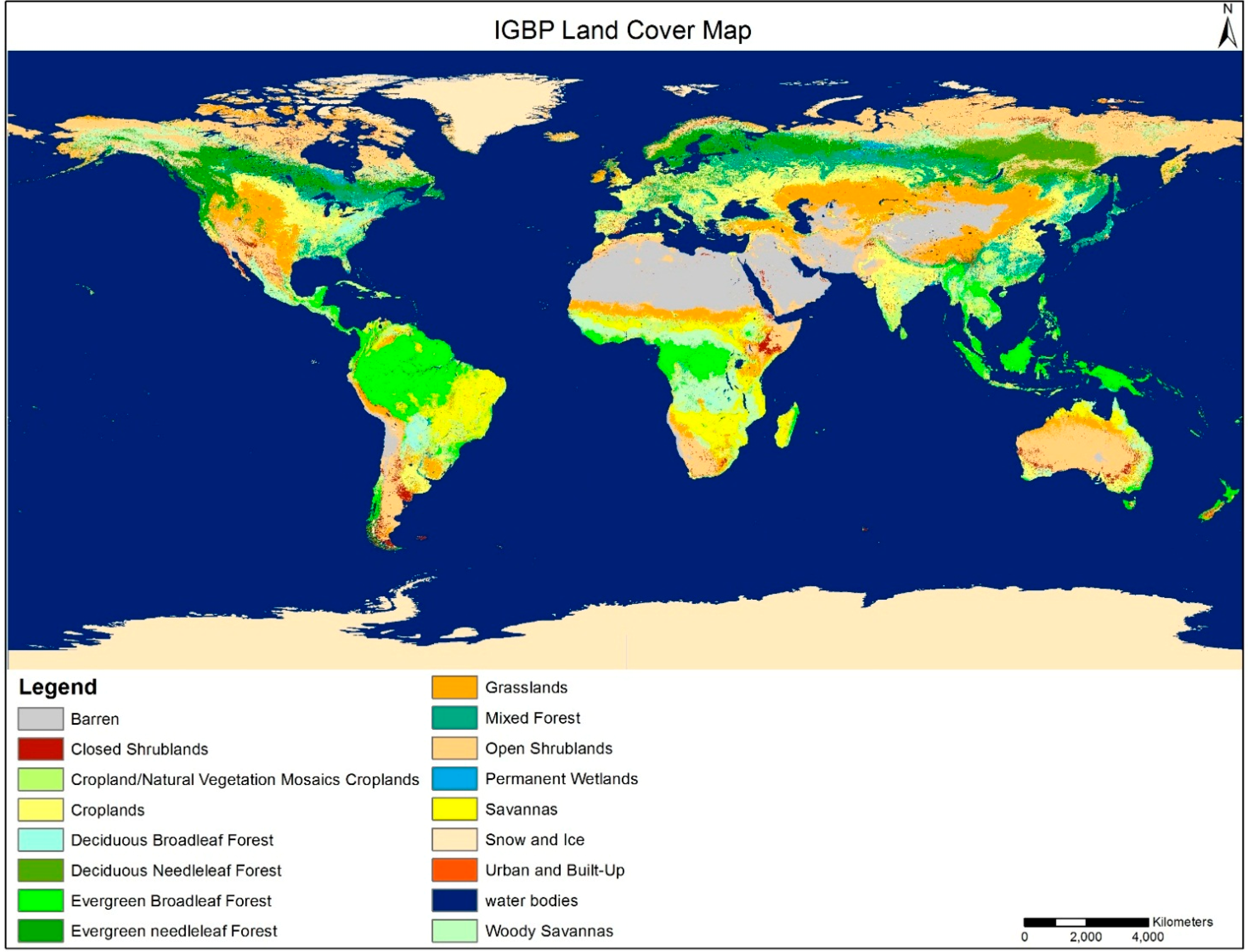
3.1.1. IGBP-DISCover
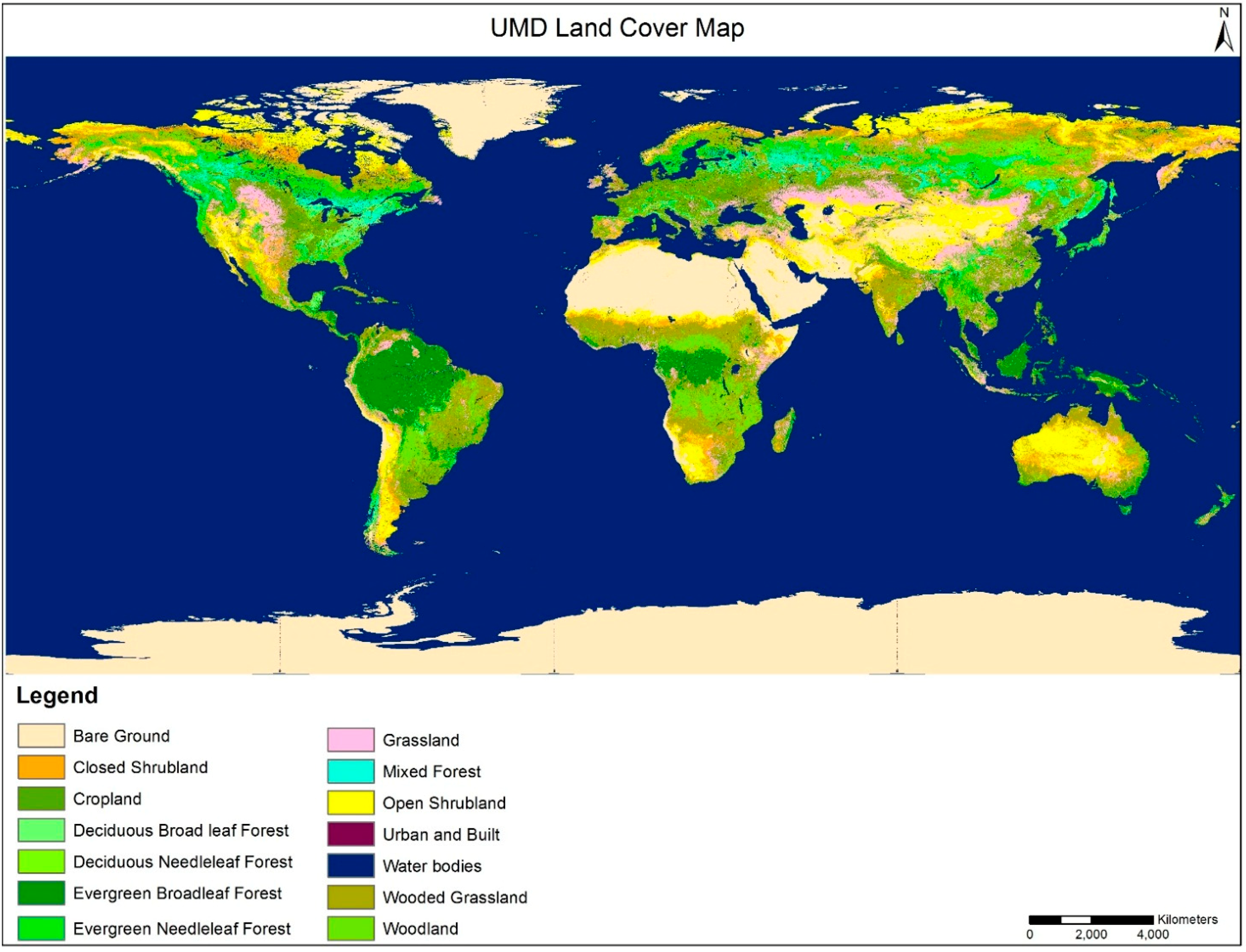
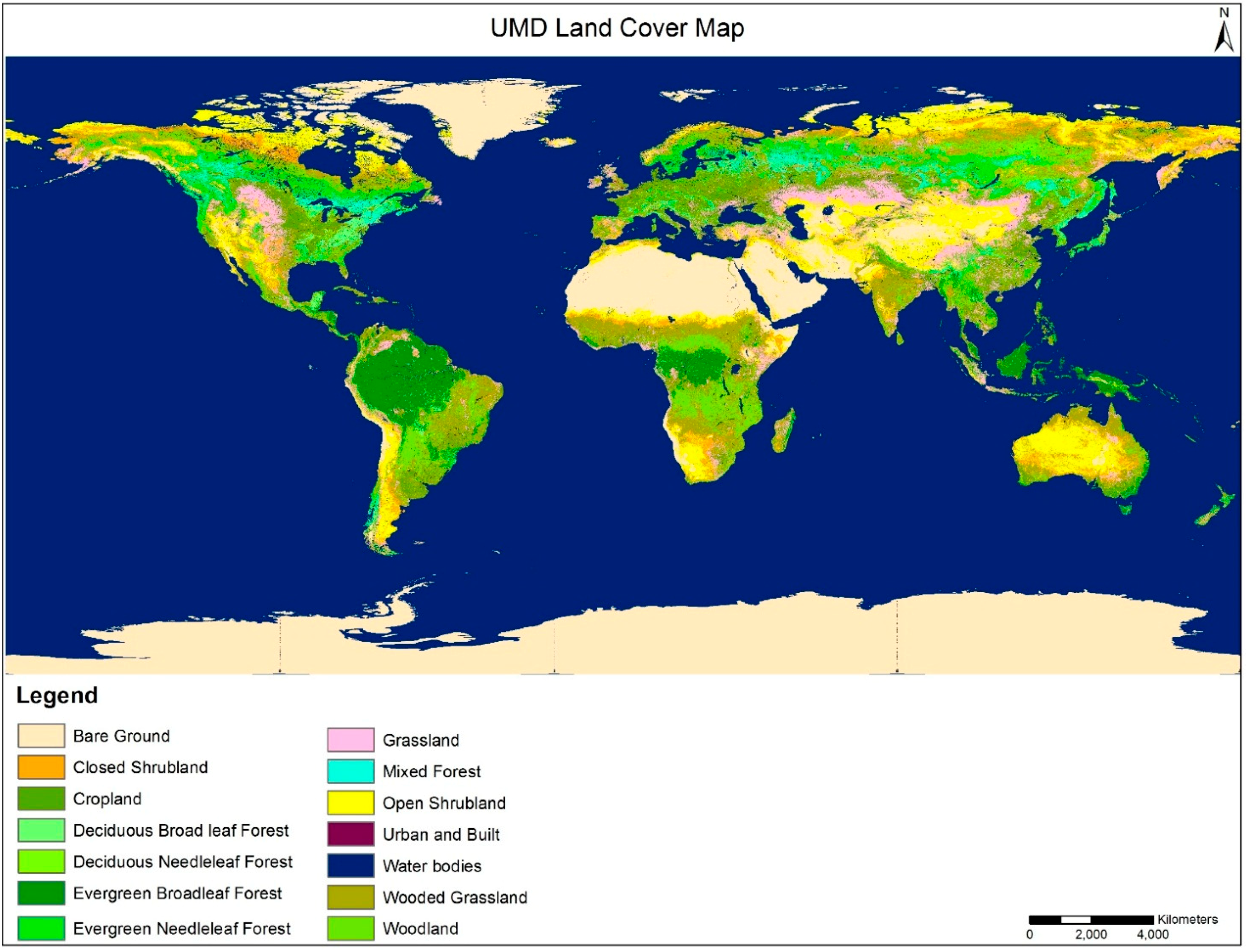
3.1.2. UMD Land Cover
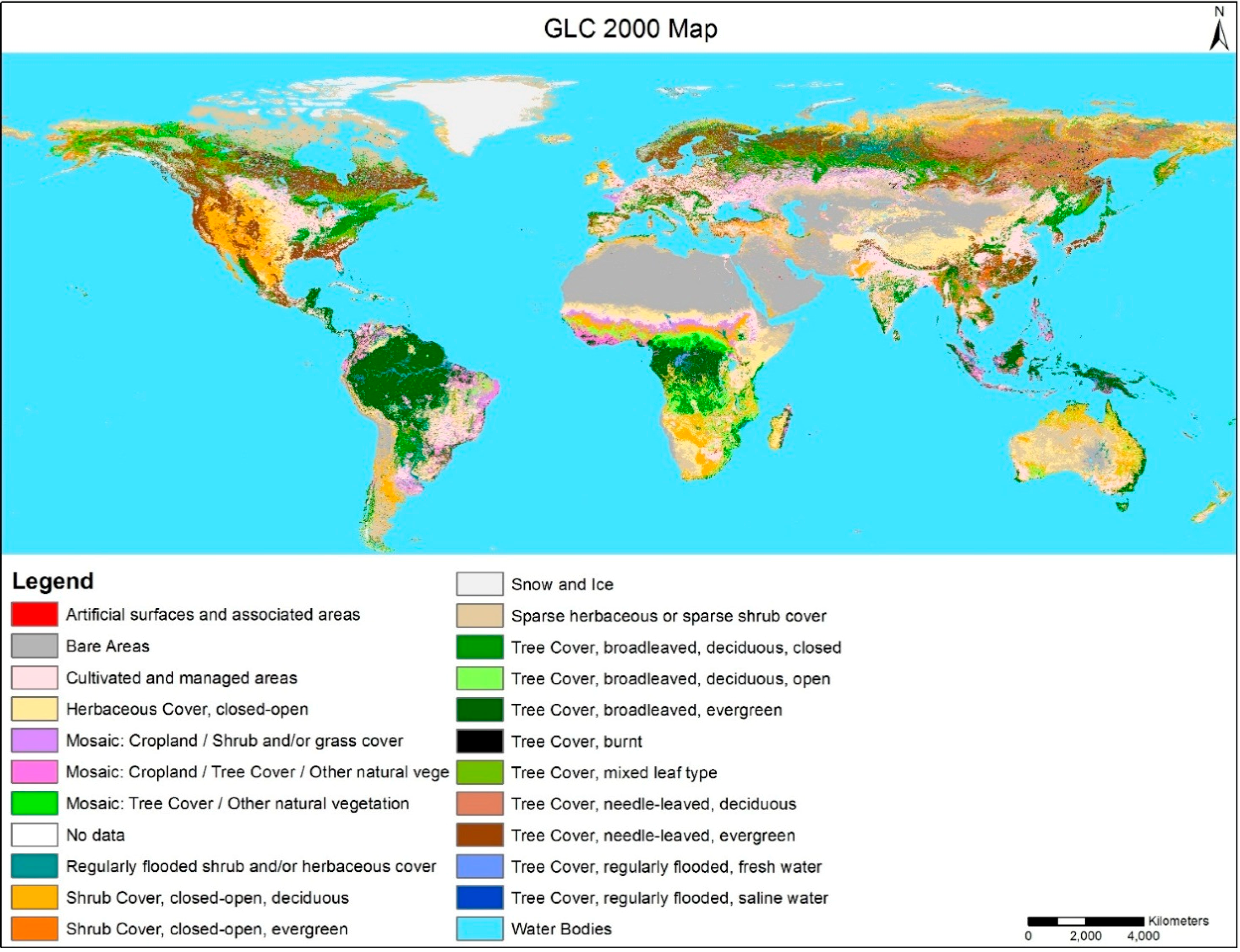
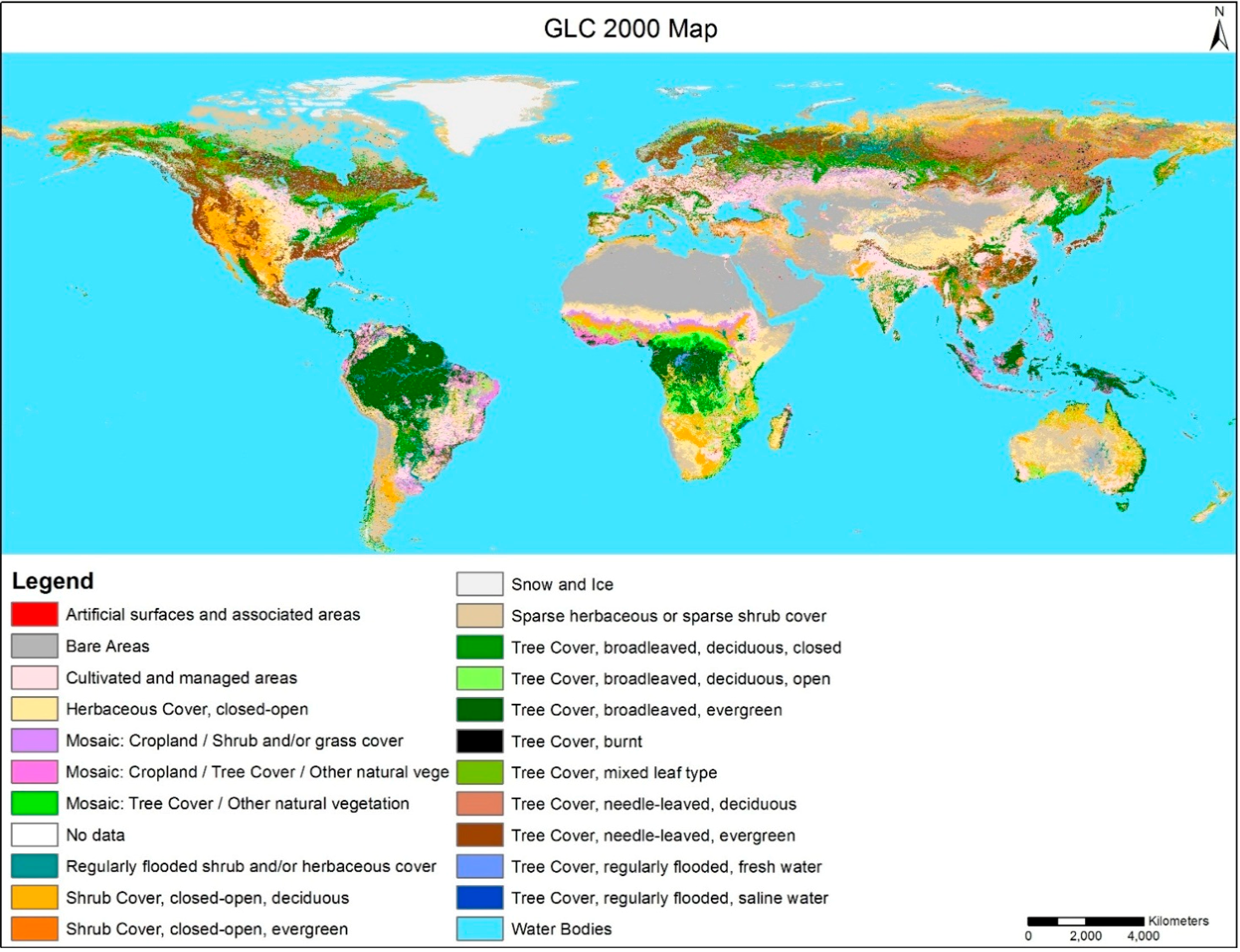
3.1.3. Global Land Cover 2000
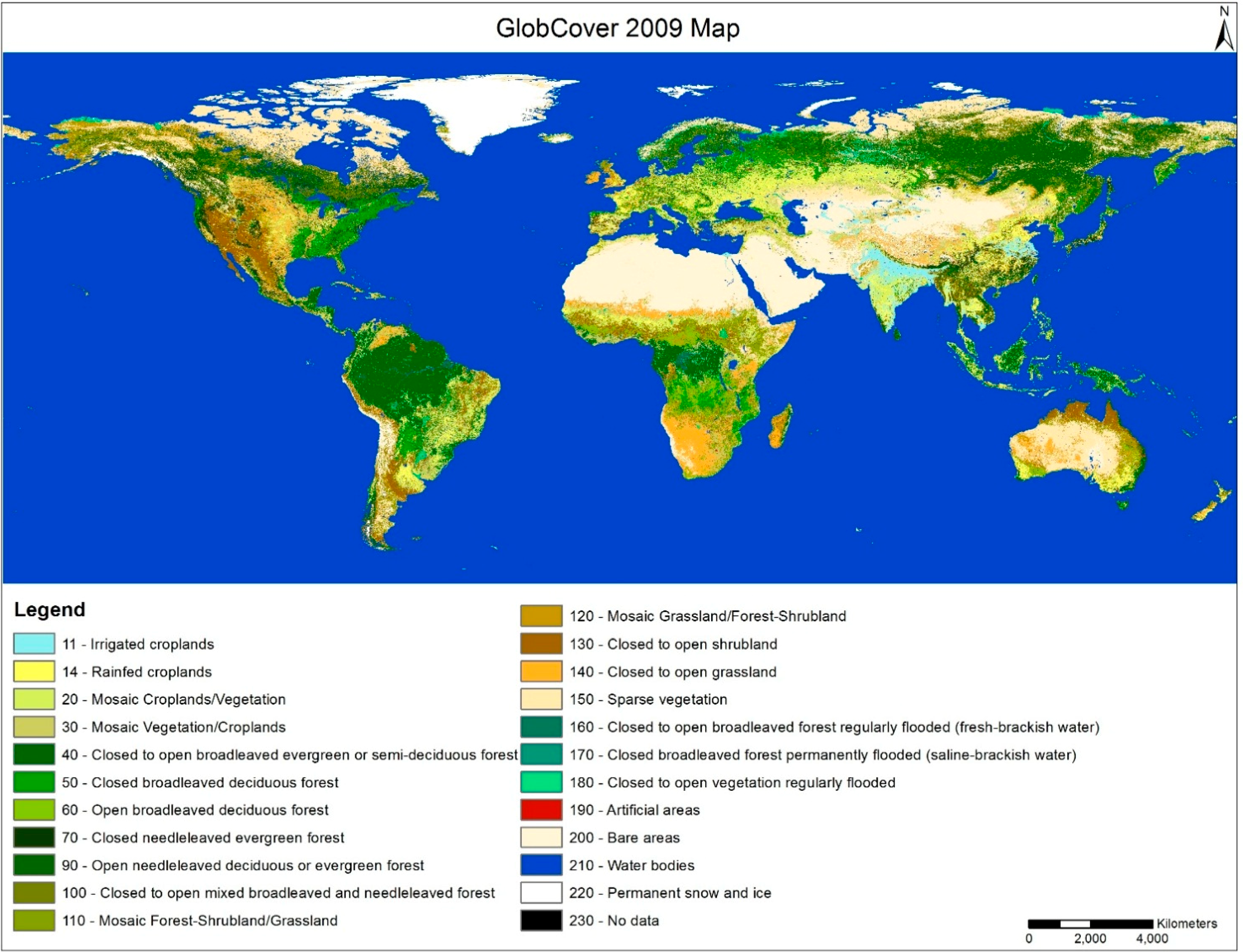
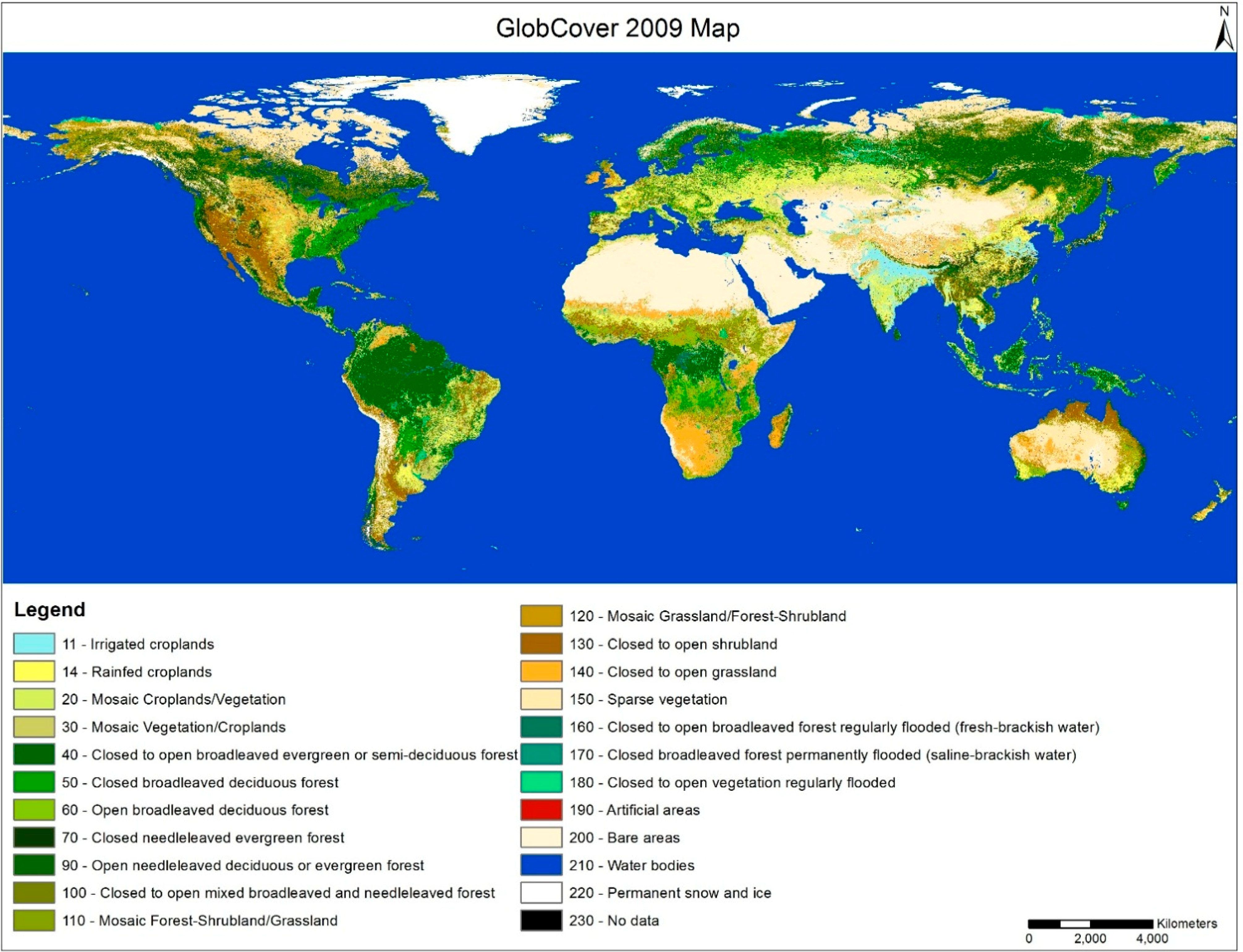
3.1.4. GlobCover 2009
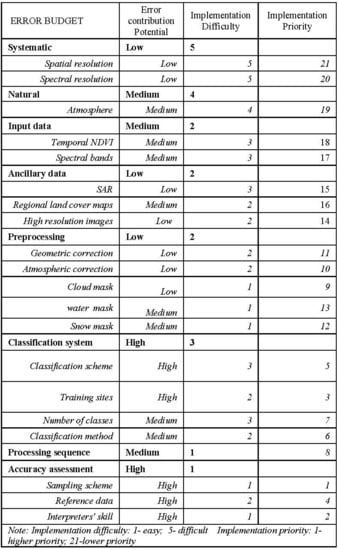
3.2. Error Budget for Global Land Cover Datasets
| N. | Error Contribution Potential | Implementation Difficulty | Implementation Priority | |
|---|---|---|---|---|
| 1 | Systematic | Low | 5 | |
| 1.1 | Spatial resolution | Low | 5 | 21 |
| 1.2 | Spectral resolution | Low | 5 | 20 |
| 2 | Natural | Medium | 4 | |
| 2.1 | Atmosphere | Medium | 4 | 19 |
| 3 | Input data | Medium | 2 | |
| 3.1 | Temporal NDVI | Medium | 3 | 18 |
| 3.2 | Spectral bands | Medium | 3 | 17 |
| 4 | Ancillary data | Low | 2 | |
| 4.1 | SAR | Low | 3 | 15 |
| 4.2 | Regional land cover maps | Medium | 2 | 16 |
| 4.3 | High resolution images | Low | 2 | 14 |
| 5 | Preprocessing | Low | 2 | |
| 5.1 | Geometric correction | Low | 2 | 11 |
| 5.2 | Atmospheric correction | Low | 2 | 10 |
| 5.3 | Cloud mask | Low | 1 | 9 |
| 5.4 | water mask | Medium | 1 | 13 |
| 5.5 | Snow mask | Medium | 1 | 12 |
| 6 | Classification system | High | 3 | |
| 6.1 | Classification scheme | High | 3 | 5 |
| 6.2 | Training sites | High | 2 | 3 |
| 6.3 | Number of classes | Medium | 3 | 7 |
| 6.4 | Classification method | Medium | 2 | 6 |
| 7 | Processing sequence | Medium | 1 | 8 |
| 8 | Accuracy assessment | High | 1 | |
| 8.1 | Sampling scheme | High | 1 | 1 |
| 8.2 | Reference data | High | 2 | 4 |
| 8.3 | Interpreters’ skill | High | 1 | 2 |
3.3. Summary of Classification Scheme for Global Land Cover Mapping Databases
| IGBP | UMD | GLC 2000 | GlobCover 2009 |
|---|---|---|---|
| Name & Description | Name & Description | Name & Description | Name & Description |
| Trees | |||
| Evergreen Broadleaf Forests (Height > 2 m, Canopy > 60%) | Evergreen Broadleaf Forests (Height > 5 m, Canopy > 60%) | Tree Cover, broadleaved, evergreen, closed to open (Height > 3–30 m, Canopy > 15%) | Broadleaved evergreen or semi-deciduous forest (>5 m) closed to open (Canopy > 15%) |
| Deciduous Broadleaf Forests (Height > 2m, Canopy > 60%) | Deciduous Broadleaf Forests (Height > 5 m, Canopy > 60%) | Tree Cover, broadleaved, deciduous, Closed (Height > 3–30 m, Canopy > 40%) | Broadleaved deciduous (>5 m) Closed (Canopy > 40%) |
| Tree Cover, broadleaved, deciduous, open (Height > 3–30 m, Canopy 15%–40%) | Broadleaved deciduous forest/woodland (>5 m), open (Canopy 15%–40%) | ||
| Evergreen needle leaf Forests (Height > 2 m, Canopy > 60%) | Evergreen needle leaf Forests (Height > 5m, Canopy > 60%) | Tree Cover, needle leaved, evergreen, closed to open (Height > 3–30 m, Canopy > 15% | Needle leaved evergreen forest (> 5 m) Closed (Canopy > 40%) |
| Deciduous needle leaf Forests (Height > 2 m, Canopy > 60%) | Deciduous Needle leaf Forests (Height > 5 m, Canopy > 60%) | Tree Cover, needle leaved, deciduous, closed to open (Height > 3–30 m, Canopy > 15%) | Needle leaved deciduous or evergreen forest (>5 m) Open (Canopy 15%–40%) |
| Mixtures or mosaics of the other four forest cover types with none of the forest types > 60% (Height > 2 m, Canopy > 60%) | Mixtures or mosaics of needle leaf and broadleaf with neither type has <25% or >75% trees (Height > 5 m, Canopy > 60%) | Tree Cover, mixed leaf type, closed to open (Height > 3–30 m, Canopy > 15%) | Closed to open (Canopy > 15%) mixed broadleaved and needle leaved forest (>5 m) |
| Tree Cover, closed to open (Height > 3–30 m, Canopy > 15%) regularly flooded, fresh or brackish water: Swamp Forests | Closed to open (Canopy > 15%) broadleaved forest regularly flooded (semi-permanently or temporarily)—Fresh or brackish water | ||
| Tree Cover, closed to open(Height > 3–30 m, Canopy > 15%), regularly flooded, saline water: Mangrove forests | Closed (Canopy > 40%) broadleaved forest or shrub land permanently flooded—Saline or brackish water | ||
| Tree Cover, burnt (mainly boreal forests) | |||
| Woody savannas Herbaceous and other understory systems (Height > 2 m, Canopy 30%–60%) | Woodlands Herbaceous or woody understories and tree, evergreen or deciduous (Height > 5 m, canopy40%–60%) | Mosaic: Tree Cover/other natural vegetation (crop component possible) (Height > 3–30 m, Canopy > 60%–70%) | Mosaic grassland (50%–70%)/forest or shrub land (20%–50%) |
| Savannas Herbaceous and other understory systems (Height > 2 m, Canopy10%–30%) | Wooded Grasslands/Shrub land Herbaceous or woody understories, evergreen or deciduous (Height > 5 m, canopy 10%–40%) | ||
| Cropland | |||
| Croplands: temporary crops followed by harvest and a bare soil period. | Crop producing > 80%, | Cultivated and managed areas(upland crops or inundated/flooded crops as, e.g., rice) | Post-flooding or irrigated croplands (or aquatic) |
| Mosaic of croplands, forest, shrub lands, and grasslands, no component > 60% | Mosaic: cropland/tree cover/other natural vegetation | Rainfed croplands | |
| Mosaic: cropland/shrub or grass cover | Mosaic cropland (50%–70%)/vegetation (20%–50%) | ||
| Mosaic vegetation (50%–70%)/cropland (20%–50%) | |||
| No. | Attributes | LCCS Definition | GLC 2000 | GlobCover 2009 | IGBP | UMD | Mappability |
|---|---|---|---|---|---|---|---|
| Basic Scheme | LCCS | LCCS | IGBP | IGBP | |||
| Tree | |||||||
| 1 | Height | >3 m–30 m | >3 m–30 m | >5 m | >2 m | >5 m | Low |
| 2 | Canopy Cover | Open (60%–70% to 20%–10%) | 15%–40% | 15%–40% | >60% | >60% | High |
| Closed (>60%–70%) | >40% | >40% | |||||
| Sparse (20%–10% to 1%) | × | × | |||||
| Closed to open (15% to 100%) | >15% | >15% | |||||
| 3 | Leaf type | Broadleaf | Broadleaf | Broadleaf | Broadleaf | Broadleaf | Medium |
| Needleleaf | Needleleaf | Needleleaf | Needleleaf | Needleleaf | |||
| Mixed | Mixed | Mixed | Mixed | Mixed | |||
| 4 | Leaf phonology | Evergreen | Evergreen | Evergreen | Evergreen | Evergreen | High |
| Deciduous | Deciduous | Deciduous | Deciduous | Deciduous | |||
| 5 | Spatial distribution (Macropattern) | Continuous (>80%) | unknown | unknown | unknown | unknown | Low |
| Fragmented (20%–80%) | 20%–50% | ||||||
| Parklike Patches | × | ||||||
| 6 | Water seasonality | Permanent | × | × | × | × | High |
| Temporary | Regular | Regular | |||||
| Waterlogged | × | × | |||||
| 7 | Water quality | Fresh water (<1000 ppm) | Fresh or brackish | Fresh or brackish | × | × | Medium |
| Brackish water (1000 ppm–10,000 ppm) | |||||||
| Saline water (>10,000 ppm) | Saline | Saline | |||||
| Crop | |||||||
| 8 | Water supply | Rainfed cultivation | Rainfed | × | × | × | Medium |
| Post-flooding Cultivation | Post-flooded or irrigated | ||||||
| Irrigated | |||||||
4. Discussion and Recommendations
4.1. Analysis of the Characteristics of Global Land Cover Mapping
4.2. Analysis of the Error Budget
4.3. Analysis of Classification Scheme
4.4. Lessons Learned
- (1)
- The classification scheme must be carefully chosen at the beginning of the project. If the maps are to be compared to previous projects, then the scheme must match exactly the previous map. Use of a crosswalk to reconcile differences between schemes is not usually effective. The scheme must have not only map labels, but also clear and concise definitions of each of the map classes.The classification scheme should be appropriate for use with remotely sensed imagery if the project involves such imagery to create the land cover map. Using a scheme that relies on information that must be collected on the ground that is smaller than the spatial resolution of the imagery dooms the project to failure. Every effort must be taken to insure that the scheme is appropriate for the resolution of the imagery used in the project.
- (2)
- The use of ancillary data can seriously improve the accuracy of the map. However, issues arise when the ancillary data (or quality of data) are not uniformly available globally.
- (3)
- Many global mapping projects are done by region. Again, care must be taken to make sure that the quality of the final global map is consistent and uniform. Coordination between regions must be vigilant in order for this to occur. It may not be necessary to employ the same classification algorithm for each region, but it is critical that the same, uniform classification scheme be used.
- (4)
- Accuracy assessment has become a widely accepted component of every mapping project. Global maps offer unique challenges, but an efficient, practical, and statistically valid assessment must be designed early in the project in cooperation with all the participants.
- (5)
- The entire mapping process must be well documented and transparent. Details must be recorded and available. Transparency aids greatly in the comparison of the map with other maps.
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Feddema, J.J.; Oleson, K.W.; Bonan, G.B.; Mearns, L.O.; Buja, L.E.; Meehl, G.A.; Washington, W.M. The importance of land-cover change in simulating future climates. Science 2005, 310, 1674–1678. [Google Scholar] [CrossRef] [PubMed]
- Sellers, P.J.; Dickinson, R.E.; Randall, D.A.; Betts, A.K.; Hall, F.G.; Berry, J.A.; Collatz, G.J.; Denning, A.S.; Mooney, H.A.; Nobre, C.A.; et al. Modeling the exchanges of energy, water, and carbon between continents and the atmosphere. Science 1997, 275, 502–509. [Google Scholar] [CrossRef]
- Stehman, S.V. Basic probability sampling designs for thematic map accuracy assessment. Int. J. Remote Sens. 1999, 20, 2423–2441. [Google Scholar] [CrossRef]
- McRoberts, R.E. Probability- and model-based approaches to inference for proportion forest using satellite imagery as ancillary data. Remote Sens. Environ. 2010, 114, 1017–1025. [Google Scholar] [CrossRef]
- DeFries, R.; Hansen, M.; Townshend, J. Global discrimination of land cover types from metrics derived from AVHRR pathfinder data. Remote Sens. Environ. 1995, 54, 209–222. [Google Scholar]
- ORNL DAAC Distributed Active Center for Biogeochemical Dynamics. Available online: http://webmap.ornl.gov/wcsdown/dataset.jsp?ds_id=10004 (accessed on 5 August 2014).
- Stone, T.A.; Schlesinger, P.; Houghton, R.A.; Woodwell, G.M. A map of the vegetation of South-America based on satellite imagery. Photogramm. Eng. Remote Sens. 1994, 60, 541–551. [Google Scholar]
- Loveland, T.; Reed, B.; Brown, J.; Ohlen, D.; Zhu, Z.; Yang, L.; Merchant, J. Development of a global land cover characteristics database and IGBP discover from 1 km AVHRR data. Int. J. Remote Sens. 2000, 21, 1303–1330. [Google Scholar] [CrossRef]
- Loveland, T.R.; Merchant, J.W.; Brown, J.F.; Ohlen, D.O.; Reed, B.C.; Olson, P.; Hutchinson, J. Map supplement: Seasonal land-cover regions of the United States. Ann. Assoc. Am. Geogr. 1995, 85, 339–355. [Google Scholar] [CrossRef]
- Global Land Cover Facility (UMD Land Cover Facility). Available online: http://glcf.umd.edu/data/landcover/ (accessed on 6 August 2014).
- Hansen, M.C.; Defries, R.S.; Townshend, J.R.G.; Sohlberg, R. Global land cover classification at 1 km spatial resolution using a classification tree approach. Int. J. Remote Sens. 2000, 21, 1331–1364. [Google Scholar] [CrossRef]
- Joint Research Center Land Resource Management Unit Global Land Cover 2000-Products. Available online: http://bioval.jrc.ec.europa.eu/products/glc2000/products.php (accessed on 6 August 2014).
- Bartholomé, E.; Belward, A.S. GLC2000: A new approach to global land cover mapping from Earth observation data. Int. J. Remote Sens. 2005, 26, 1959–1977. [Google Scholar] [CrossRef]
- Esa Data User Element (GlobCover). Available online: http://due.esrin.esa.int/globcover/ (accessed on 6 August 2014).
- Sophie, B.; Pierre, D. GlobCover 2009 Products Description and Validation Report; European Space Agency: Paris, France, 2010. [Google Scholar]
- Herold, M.; Mayaux, P.; Woodcock, C.E.; Baccini, A.; Schmullius, C. Some challenges in global land cover mapping: An assessment of agreement and accuracy in existing 1 km datasets. Remote Sens. Environ. 2008, 112, 2538–2556. [Google Scholar] [CrossRef]
- Giri, C.; Zhu, Z.; Reed, B. A comparative analysis of the Global Land Cover 2000 and MODIS land cover data sets. Remote Sens. Environ. 2005, 94, 123–132. [Google Scholar] [CrossRef]
- Hansen, M.C.; Reed, B. A comparison of the IGBP discover and university of Maryland 1 km global land cover products. Int. J. Remote Sens. 2000, 21, 1365–1373. [Google Scholar] [CrossRef]
- Pérez-Hoyos, A.; García-Haro, F.J.; San-Miguel-Ayanz, J. Conventional and fuzzy comparisons of large scale land cover products: Application to CORINE, GLC2000, MODIS and GlobCover in Europe. ISPRS J. Photogramm. Remote Sens. 2012, 74, 185–201. [Google Scholar]
- Di Gregorio, A.; Jansen, L.J. Land Cover Classification System (LCCS): Classification Concepts and User Manual; Food and Agriculture Organization of the United Nations: Rome, Italy, 2000. [Google Scholar]
- McCallum, I.; Obersteiner, M.; Nilsson, S.; Shvidenko, A. A spatial comparison of four satellite derived 1 km global land cover datasets. Int. J. Appl. Earth Obs. Geoinf. 2006, 8, 246–255. [Google Scholar] [CrossRef]
- Latifovic, R.; Olthof, I. Accuracy assessment using sub-pixel fractional error matrices of global land cover products derived from satellite data. Remote Sens. Environ. 2004, 90, 153–165. [Google Scholar] [CrossRef]
- Santayana, G. The Life of Reason: Or the Phases of Human Progress, Volume 1, Reason in Common Sense; Dover: England, UK, 1905. [Google Scholar]
- Congalton, R.G.; Green, K. Assessing the Accuracy of Remotely Sensed Data: Principles and Practices; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- Congalton, R.; Brennan, M. Error in remotely sensed data analysis: Evaluation and reduction. In Proceedings of the Sixty Fifth Annual Meeting of the American Society of Photogrammetry and Remote Sensing, Portland, OR, USA, 17–21 May 1999; Volume 729.
- Loveland, T.R.; Zhu, Z.L.; Ohlen, D.O.; Brown, J.F.; Reed, B.C.; Yang, L.M. An analysis of the IGBP global land-cover characterization process. Photogramm. Eng. Remote Sens. 1999, 65, 1021–1032. [Google Scholar]
- Brown, J.F.; Loveland, T.R.; Ohlen, D.O.; Zhu, Z.L. The global land-cover characteristics database: The users’ perspective. Photogramm. Eng. Remote Sens. 1999, 65, 1069–1074. [Google Scholar]
- Loveland, T.R.; Belward, A.S. The IGBP-DIS global 1 km land cover data set, discover: First results. Int. J. Remote Sens. 1997, 18, 3289–3295. [Google Scholar] [CrossRef]
- Belward, A.S.; Estes, J.E.; Kline, K.D. The IGBP-DIS global 1-km land-cover data set discover: A project overview. Photogramm. Eng. Remote Sens. 1999, 65, 1013–1020. [Google Scholar]
- Arino, O.; Ramos Perez, J.; Kalogirou, V.; Bontemps, S.; Defourny, P.; van Bogaert, E. Global Land Cover Map for 2009 (GlobCover 2009); European Space Agency (ESA) & Université Catholique de Louvain (UCL): Frascati, Italy, 2012. [Google Scholar]
- Bontemps, S.; Defourny, P.; van Bogaert, E.; Olivier, A.; Vasileios, K. GlobCover 2009—Product Description Manual; ESA: Paris, France, 2009; p. 17. [Google Scholar]
- Bontemps, S.; Defourny, P.; van Bogaert, E.; Arino, O.; Kalogirou, V.; Ramos-Perez, J. GlobCover 2009—Products Description and Validation Report; ESA: Paris, France, 2011. [Google Scholar]
- Fritz, S.; See, L. Identifying and quantifying uncertainty and spatial disagreement in the comparison of global land cover for different applications. Glob. Chang. Biol. 2008, 14, 1057–1075. [Google Scholar] [CrossRef]
- Global Land Cover Characterization (USGS). Available online: http://edc2.usgs.gov/glcc/glcc.php (accessed on 7 August 2014).
- Danko, D.M. The Digital Chart of the World project. Photogramm. Eng. Remote Sens. 1992, 58, 1125–1128. [Google Scholar]
- Tucker, C.J.; Justice, C.O.; Prince, S.D. Monitoring the grasslands of the Sahel 1984–1985. Int. J. Remote Sens. 1986, 7, 1571–1581. [Google Scholar] [CrossRef]
- Scepan, J.; Menz, G.; Hansen, M.C. The discover validation image interpretation process. Photogramm. Eng. Remote Sens. 1999, 65, 1075–1081. [Google Scholar]
- Townshend, J.R.G.; Justice, C.O.; Skole, D.; Malingreau, J.P.; Cihlar, J.; Teillet, P.; Sadowski, F.; Ruttenberg, S. The 1 km resolution global data set: Needs of the international geosphere biosphere programme. Int. J. Remote Sens. 1994, 15, 3417–3441. [Google Scholar] [CrossRef]
- Eidenshink, J.C.; Faundeen, J.L. The 1km AVHRR global land data set—1st stages in implementation. Int. J. Remote Sens. 1994, 15, 3443–3462. [Google Scholar] [CrossRef]
- De Fries, R.S.; Hansen, M.; Townshend, J.R.G.; Sohlberg, R. Global land cover classifications at 8 km spatial resolution: The use of training data derived from Landsat imagery in decision tree classifiers. Int. J. Remote Sens. 1998, 19, 3141–3168. [Google Scholar] [CrossRef]
- Pflugmacher, D.; Krankina, O.N.; Cohen, W.B.; Friedl, M.A.; Sulla-Menashe, D.; Kennedy, R.E.; Nelson, P.; Loboda, T.V.; Kuemmerle, T.; Dyukarev, E.; et al. Comparison and assessment of coarse resolution land cover maps for northern Eurasia. Remote Sens. Environ. 2011, 115, 3539–3553. [Google Scholar] [CrossRef]
- Mayaux, P.; Bartholomé, E.; Fritz, S.; Belward, A. A new land-cover map of Africa for the year 2000. J. Biogeog. 2004, 31, 861–877. [Google Scholar] [CrossRef]
- Fritz, S.; See, L.; Rembold, F. Comparison of global and regional land cover maps with statistical information for the agricultural domain in Africa. Int. J. Remote Sens. 2010, 31, 2237–2256. [Google Scholar] [CrossRef]
- Bartalev, S.A.; Belward, A.S.; Erchov, D.V.; Isaev, A.S. A new Spot4-vegetation derived land cover map of northern Eurasia. Int. J. Remote Sens. 2003, 24, 1977–1982. [Google Scholar]
- Jung, M.; Henkel, K.; Herold, M.; Churkina, G. Exploiting synergies of global land cover products for carbon cycle modeling. Remote Sens. Environ. 2006, 101, 534–553. [Google Scholar] [CrossRef]
- Fritz, S.; Bartholomé, E.; Belward, A.; Hartley, A.; Stibig, H.; Eva, H.; Mayaux, P.; Bartalev, S.; Latifovic, R.; Kolmert, S. Harmonisation, Mosaicing and Production of the Global Land Cover 2000 Database (Beta Version); Office for Official Publications of the European Communities: Luxembourg, 2003. [Google Scholar]
- Eva, H.D.; Belward, A.S.; de Miranda, E.E.; di Bella, C.M.; Gond, V.; Huber, O.; Jones, S.; Sgrenzaroli, M.; Fritz, S. A land cover map of South America. Glob. Chang. Biol. 2004, 10, 731–744. [Google Scholar] [CrossRef]
- Mayaux, P.; Eva, H.; Gallego, J.; Strahler, A.H.; Herold, M.; Agrawal, S.; Naumov, S.; de Miranda, E.E.; di Bella, C.M.; Ordoyne, C.; et al. Validation of the global land cover 2000 map. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1728–1739. [Google Scholar] [CrossRef]
- Bicheron, P.; Defourny, P.; Brockmann, C.; Schouten, L.; Vancutsem, C.; Huc, M.; Bontemps, S.; Leroy, M.; Archard, F.; Herold, M. GlobCover: Products Description and Validation Report [Online]; Medias France: Toulouse, France, 2008; Available online: http://publications.jrc.ec.europa.eu/repository/handle/JRC49240 (accessed on 8 August 2014).
- Defourny, P.; Bontemps, S.; Obsomer, V.; Schouten, L.; Bartalev, S.; Herold, M.; Bicheron, P.; Bogaert, E.V.; Leroy, M.; Arino, O. Accuracy assessment of global land cover maps: Lessons learnt from the GlobCover and GlobCorine Experiences. In Proceedings of 2010 European Space Agency Living Planet Symposium, Bergen, Norway, 28 June–2 July 2010.
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]
- McRoberts, R.E. Satellite image-based maps: Scientific inference or pretty pictures? Remote Sens. Environ. 2011, 115, 715–724. [Google Scholar] [CrossRef]
- Muller, S.; Walker, D.; Nelson, F.; Auerback, N.; Bockheim, J.; Guyer, S.; Sherba, D. Accuracy assessment of a land-cover map of the Kuparuk River basin, Alaska: Considerations for remote regions. Photogramm. Eng. Remote Sens. 1998, 64, 619–628. [Google Scholar]
- Stehman, S.V. Statistical rigor and practical utility in thematic map accuracy assessment. Photogramm. Eng. Remote Sens. 2001, 67, 727–734. [Google Scholar]
- Kavzoglu, T. Increasing the accuracy of neural network classification using refined training data. Environ. Model. Softw. 2009, 24, 850–858. [Google Scholar]
- Shao, Y.; Lunetta, R.S. Sub-pixel mapping of tree canopy, impervious surfaces, and cropland in the Laurentian Great Lakes basin using MODIS time-series data. IEEE J-Stars 2011, 4, 336–347. [Google Scholar]
- Smith, J.H.; Stehman, S.V.; Wickham, J.D.; Yang, L.M. Effects of landscape characteristics on land-cover class accuracy. Remote Sens. Environ. 2003, 84, 342–349. [Google Scholar] [CrossRef]
- Dubayah, R.; Knox, R.; Hofton, M.; Blair, J.B.; Drake, J. Land surface characterization using lidar remote sensing. In Spatial Information for Land Use Management; Hill, M.J., Aspinall, R.J., Eds.; CRC Press: New York, NY, USA, 2000; pp. 25–38. [Google Scholar]
- Yamamoto, K.; Takahashi, T.; Miyachi, Y.; Kondo, N.; Morita, S.; Nakao, M.; Shibayama, T.; Takaichi, Y.; Tsuzuku, M.; Murate, N. Estimation of mean tree height using small-footprint airborne Lidar without a digital terrain model. J. For. Res. 2011, 16, 425–431. [Google Scholar] [CrossRef]
- Andersen, H.-E.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using lidar data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar] [CrossRef]
- Olofsson, P.; Foody, G.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Congalton, R.G.; Gu, J.; Yadav, K.; Thenkabail, P.; Ozdogan, M. Global Land Cover Mapping: A Review and Uncertainty Analysis. Remote Sens. 2014, 6, 12070-12093. https://doi.org/10.3390/rs61212070
Congalton RG, Gu J, Yadav K, Thenkabail P, Ozdogan M. Global Land Cover Mapping: A Review and Uncertainty Analysis. Remote Sensing. 2014; 6(12):12070-12093. https://doi.org/10.3390/rs61212070
Chicago/Turabian StyleCongalton, Russell G., Jianyu Gu, Kamini Yadav, Prasad Thenkabail, and Mutlu Ozdogan. 2014. "Global Land Cover Mapping: A Review and Uncertainty Analysis" Remote Sensing 6, no. 12: 12070-12093. https://doi.org/10.3390/rs61212070
APA StyleCongalton, R. G., Gu, J., Yadav, K., Thenkabail, P., & Ozdogan, M. (2014). Global Land Cover Mapping: A Review and Uncertainty Analysis. Remote Sensing, 6(12), 12070-12093. https://doi.org/10.3390/rs61212070