From Remotely Sensed Vegetation Onset to Sowing Dates: Aggregating Pixel-Level Detections into Village-Level Sowing Probabilities

Abstract
:1. Introduction
2. Material and Methods
2.1. Data

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Total | April | May | June | July | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Dek1 | Dek2 | Dek3 | Dek1 | Dek2 | Dek3 | Dek1 | Dek2 | Dek3 | Dek1 | Dek2 | Dek3 | ||
| Diffa | 600 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 170 | 450 | 600 | 600 |
| Dosso | 1448 | 0 | 0 | 6 | 60 | 337 | 744 | 798 | 1073 | 1442 | 1448 | 1448 | 1448 |
| Maradi | 2181 | 7 | 7 | 7 | 7 | 229 | 563 | 966 | 1391 | 1766 | 2091 | 2181 | 2181 |
| Niamey | 34 | 0 | 0 | 0 | 0 | 0 | 17 | 17 | 30 | 34 | 34 | 34 | 34 |
| Tahoua | 1495 | 0 | 0 | 0 | 1 | 42 | 224 | 387 | 673 | 1078 | 1380 | 1493 | 1495 |
| Tillabery | 1849 | 0 | 0 | 0 | 3 | 73 | 279 | 710 | 1184 | 1783 | 1830 | 1849 | 1849 |
| Zinder | 2950 | 0 | 0 | 22 | 35 | 87 | 187 | 406 | 585 | 2077 | 2847 | 2932 | 2950 |
| Niger a | 10557 | 7 | 7 | 35 | 106 | 768 | 2014 | 3284 | 4936 | 8350 | 10080 | 10537 | 10557 |
2.2. Village Buffer Mask
- Exclusion of the villages outside the agricultural and agro-pastoral zones as defined by FEWS NET’s Niger Livelihood Profiles since sowing is not expected to happen in those;
- Generation of buffers of radius r in {1, 2, 3, …, 8} km around the villages located in the agricultural and agro-pastoral zones;
- Individual village buffers are merged in order to create eight so called village buffer masks (VBM), each one corresponding to a different buffer size;
- Computing the area covered by the crop mask, by each of the VBMs and the intersections between the crop mask and the VBMs.

2.3. Onset Detections Derived from MODIS
2.4. Statistical Framework
2.5. Rainfall Estimate for Sowing Dates
3. Results
3.1. Village Buffer Mask
| Variable | Buffer Size around Villages | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| 1 km | 2 km | 3 km | 4 km | 5 km | 6 km | 7 km | 8 km | |||
| %CM Covered by the VBM | 29.3 | 68.6 | 87.5 | 94.8 | 97.6 | 98.8 | 99.4 | 99.6 | ||
| %VBM not Covered by the CM | 42.8 | 47.7 | 53.1 | 57.0 | 59.6 | 61.2 | 62.4 | 63.3 | ||
| Difference | −13.5 | 20.8 | 34.5 | 37.9 | 38.0 | 37.6 | 37.0 | 36.3 | ||
3.2. Vegetation Onset Detections and Rainfall Thresholds

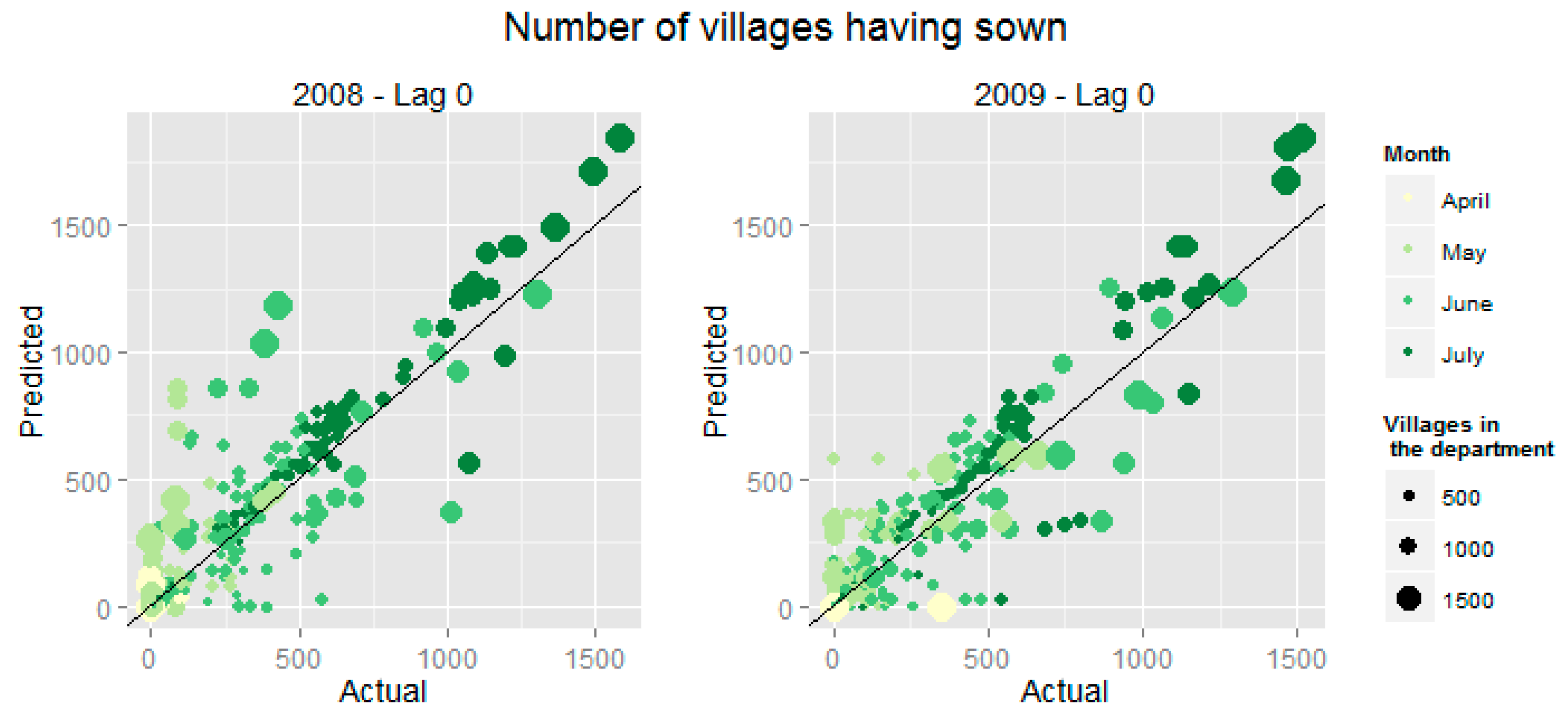
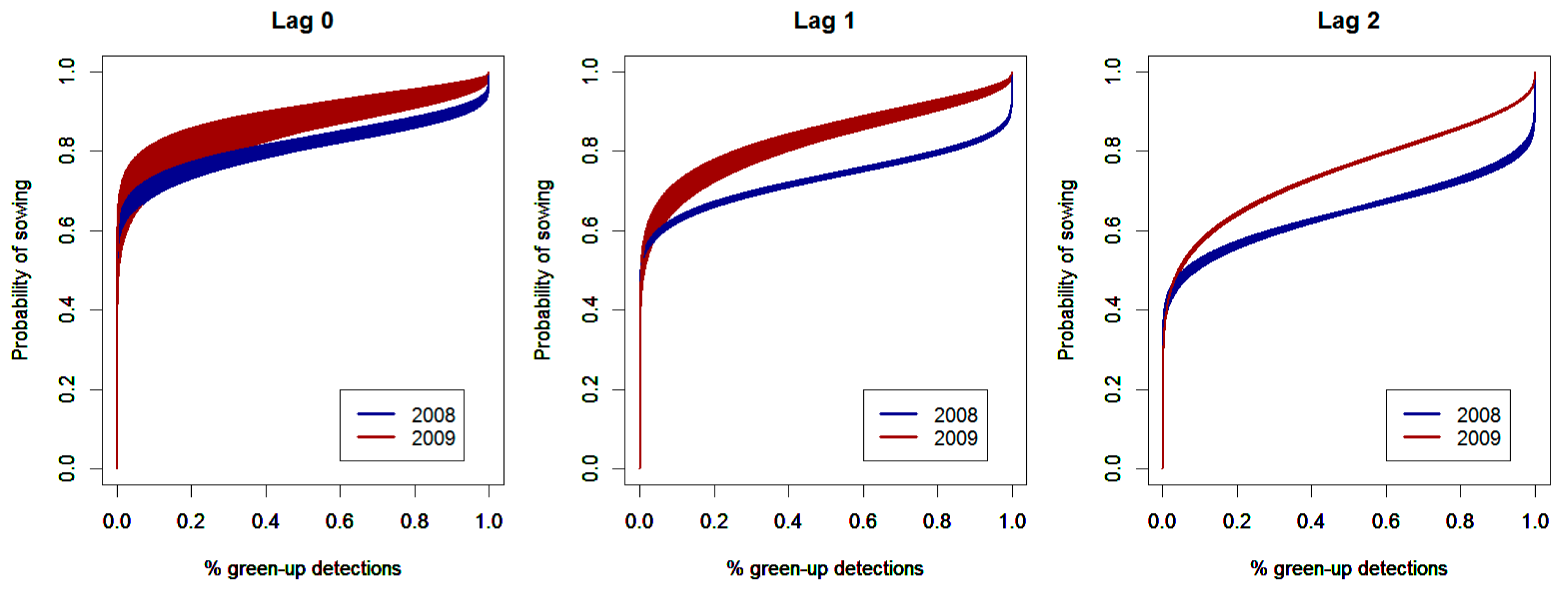
3.3. From Vegetation Onset to Sowing Dates
| Parameter | 2008 | 2009 | ||||||
|---|---|---|---|---|---|---|---|---|
| Lag0 | Lag1 | Lag2 | RFE | Lag0 | Lag1 | Lag2 | RFE | |
| β0 | 0.9106 | 0.6286 | 0.3836 | - | 1.2020 | 1.0316 | 0.7223 | - |
| sd(β0) | 0.0280 | 0.0088 | 0.0057 | - | 0.0836 | 0.0394 | 0.0050 | - |
| β1 | 0.2721 | 0.2375 | 0.2640 | - | 0.3787 | 0.4173 | 0.4246 | - |
| sd(β1) | 0.0129 | 0.0030 | 0.0159 | - | 0.0260 | 0.0134 | 0.0030 | - |
| R2 | 0.82 | 0.82 | 0.81 | 0.74 | 0.86 | 0.83 | 0.79 | 0.73 |
| RMASE | 869 | 860 | 876 | 1112 | 783 | 827 | 917 | 1132 |
| R2-cross | 0.82 | 0.82 | 0.81 | - | 0.85 | 0.81 | 0.77 | - |
| RMASE-cross | 860 | 867 | 884 | - | 831 | 913 | 1023 | - |
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sivakumar, M.V.K. Predicting rainy season potential from the onset of rains in Southern Sahelian and Sudanian climatic zones of West Africa. Agric. For. Meteorol. 1988, 42, 295–305. [Google Scholar]
- Sivakumar, M.V.K. Exploiting rainy season potential from the onset of rains in the Sahelian zone of West Africa. Agric. For. Meteorol. 1990, 51, 321–332. [Google Scholar]
- Akponikpe, P.B.I. Millet Response to Water and Soil Fertility Management in the Sahelian Niger: Experiments and Modeling. Available online: http://dial.academielouvain.be/downloader/downloader.py?pid=boreal:19624&datastream=PDF_01 (accessed on 3 June 2014).
- Bacci, L.; Cantini, C.; Pierini, F.; Maracchi, G.; Reyniers, F.N. Effects of sowing date and nitrogen fertilization on growth, development and yield of a short day cultivar of millet (Pennisetum glaucum L.) in Mali. Eur. J. Agron. 1999, 10, 9–21. [Google Scholar]
- De Beurs, K.M.; Henebry, G.M. Spatio-Temporal statistical methods for modelling land surface phenology. In Phenological Research; Hudson, I.L., Keatley, M.R., Eds.; Springer Netherlands: Berlin, Germany, 2010; pp. 177–208. [Google Scholar]
- AGRHYMET. Méthodologie De Suivi Des Zones À Risque; AGRHYMET FLASH, Bulletin de Suivi de la Campagne Agricole au Sahel, Centre Regional AGRHYMET: Niamey, Niger, 1996; Volume 2, No. 0/96. [Google Scholar]
- Graef, F.; Haigis, J. Spatial and temporal rainfall variability in the Sahel and its effects on farmers’ management strategies. J. Arid Environ. 2001, 48, 221–231. [Google Scholar]
- Dinku, T.; Chidzambwa, S.; Ceccato, P.; Connor, S.J.; Ropelewski, C.F. Validation of high-resolution satellite rainfall products over complex terrain. Int. J. Remote Sens. 2008, 29, 4097–4110. [Google Scholar]
- Dinku, T.; Ceccato, P.; Cressman, K.; Connor, S.J. Evaluating detection skills of satellite rainfall estimates over desert locust recession regions. J. Appl. Meteorol. Climatol. 2010, 49, 1322–1332. [Google Scholar]
- Dinku, T.; Ceccato, P.; Connor, S.J. Challenges of satellite rainfall estimation over mountainous and arid parts of east Africa. Int. J. Remote Sens. 2011, 32, 5965–5979. [Google Scholar]
- Holben, B.N. Characteristics of maximum-value composite images from temporal AVHRR data. Int. J. Remote Sens. 1986, 7, 1417–1434. [Google Scholar]
- Lillesaeter, O. Spectral reflectance of partly transmitting leaves: Laboratory measurements and mathematical modeling. Remote Sens. Environ. 1982, 12, 247–254. [Google Scholar]
- Huete, A.R. Soil influence in remote sensed vegetation-canopy spectra. In Introduction to the Physics and Techniques of Remote Sensing; Wiley-Interscience: New York, NY, USA, 1987; pp. 107–141. [Google Scholar]
- Gutman, G.G. On the use of long-term global data of land reflectances and vegetation indices derived from the advanced very high resolution radiometer. J. Geophys. Res. Atmos. 1999, 104, 6241–6255. [Google Scholar]
- Despland, E.; Rosenberg, J.; Simpson, S.J. Landscape structure and locust swarming: A satellite’s eye view. Ecography 2004, 27, 381–391. [Google Scholar]
- Ceccato, P.N. Operational early warning system using SPOT-VGT and TERRA-MODIS to predict desert locust outbreaks. In Proceedings of the 2nd VEGETATION International Users Conference: 1998–2004: 6 Years of Operational Activities; European Commission: Brussels, Belgium, 2005; pp. 65–76. [Google Scholar]
- Moulin, S.; Kergoat, L.; Viovy, N.; Dedieu, G. Global-Scale assessment of vegetation phenology using NOAA/AVHRR satellite measurements. J. Climate 1997, 10, 1154–1170. [Google Scholar]
- Tateishi, R.; Ebata, M. Analysis of phenological change patterns using 1982–2000 Advanced Very High Resolution Radiometer (AVHRR) data. Int. J. Remote Sens. 2004, 25, 2287–2300. [Google Scholar]
- Piao, S.; Fang, J.; Zhou, L.; Ciais, P.; Zhu, B. Variations in satellite-derived phenology in China’s temperate vegetation. Glob. Change Biol. 2006, 12, 672–685. [Google Scholar]
- Ceccato, P.; Gobron, N.; Flasse, S.; Pinty, B.; Tarantola, S. Designing a spectral index to estimate vegetation water content from remote sensing data: Part 1: Theoretical approach. Remote Sens. Environ. 2002, 82, 188–197. [Google Scholar]
- Pekel, J.-F.; Ceccato, P.; Vancutsem, C.; Cressman, K.; Vanbogaert, E.; Defourny, P. Development and application of multi-temporal colorimetric transformation to monitor vegetation in the desert locust habitat. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2011, 4, 318–326. [Google Scholar]
- Brown, M.E.; de Beurs, K.M. Evaluation of multi-sensor semi-arid crop season parameters based on NDVI and rainfall. Remote Sens. Environ. 2008, 112, 2261–2271. [Google Scholar]
- Vintrou, E.; Bégué, A.; Baron, C.; Saad, A.; Lo Seen, D.; Traoré, S.B. A comparative study on satellite- and model-based crop phenology in West Africa. Remote Sens. 2014, 6, 1367–1389. [Google Scholar]
- Funk, C.; Budde, M.E. Phenologically-tuned MODIS NDVI-based production anomaly estimates for Zimbabwe. Remote Sens. Environ. 2009, 113, 115–125. [Google Scholar]
- Atzberger, C.; Klisch, A.; Mattiuzzi, M.; Vuolo, F. Phenological metrics derived over the european continent from NDVI3G data and MODIS time series. Remote Sens. 2013, 6, 257–284. [Google Scholar]
- Meroni, M.; Verstraete, M.M.; Rembold, F.; Urbano, F.; Kayitakire, F. A phenology-based method to derive biomass production anomalies for food security monitoring in the Horn of Africa. Int. J. Remote Sens. 2014, 35, 2472–2492. [Google Scholar]
- Sakamoto, T.; Yokozawa, M.; Toritani, H.; Shibayama, M.; Ishitsuka, N.; Ohno, H. A crop phenology detection method using time-series MODIS data. Remote Sens. Environ. 2005, 96, 366–374. [Google Scholar]
- Zhang, X.; Friedl, M.A.; Schaaf, C.B.; Strahler, A.H.; Hodges, J.C.F.; Gao, F.; Reed, B.C.; Huete, A. Monitoring vegetation phenology using MODIS. Remote Sens. Environ. 2003, 84, 471–475. [Google Scholar]
- Xie, P.; Arkin, P.A. Global precipitation: A 17-year monthly analysis based on gauge observations, satellite estimates, and numerical model outputs. Bull. Am. Meteorol. Soc. 1997, 78, 2539–2558. [Google Scholar]
- Direction Des Statistiques. In Evaluation de la Campagne Agricole 2008/2009 et Résultats Définitifs; Direction Des Statistiques, Ministere Du Developpement Agricole: Niamey, Niger, 2009.
- Vancutsem, C.; Marinho, E.; Kayitakire, F.; See, L.; Fritz, S. Harmonizing and combining existing land cover/land use datasets for cropland area monitoring at the African Continental Scale. Remote Sens. 2013, 5, 19–41. [Google Scholar]
- Vancutsem, C.; Pekel, J.-F.; Bogaert, P.; Defourny, P. Mean compositing, an alternative strategy for producing temporal syntheses. Concepts and performance assessment for SPOT VEGETATION time series. Int. J. Remote Sens. 2007, 28, 5123–5141. [Google Scholar]
- Wang, Y.H. On the number of successes in independent trials. Stat. Sin. 1993, 3, 295–312. [Google Scholar]
- Meroni, M.; Fasbender, D.; Kayitakire, F.; Pini, G.; Rembold, F.; Urbano, F.; Verstraete, M.M. Early detection of biomass production deficit hot-spots in semi-arid environment using FAPAR time series and a probabilistic approach. Remote Sens. Environ. 2014, 142, 57–68. [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marinho, E.; Vancutsem, C.; Fasbender, D.; Kayitakire, F.; Pini, G.; Pekel, J.-F. From Remotely Sensed Vegetation Onset to Sowing Dates: Aggregating Pixel-Level Detections into Village-Level Sowing Probabilities. Remote Sens. 2014, 6, 10947-10965. https://doi.org/10.3390/rs61110947
Marinho E, Vancutsem C, Fasbender D, Kayitakire F, Pini G, Pekel J-F. From Remotely Sensed Vegetation Onset to Sowing Dates: Aggregating Pixel-Level Detections into Village-Level Sowing Probabilities. Remote Sensing. 2014; 6(11):10947-10965. https://doi.org/10.3390/rs61110947
Chicago/Turabian StyleMarinho, Eduardo, Christelle Vancutsem, Dominique Fasbender, François Kayitakire, Giancarlo Pini, and Jean-François Pekel. 2014. "From Remotely Sensed Vegetation Onset to Sowing Dates: Aggregating Pixel-Level Detections into Village-Level Sowing Probabilities" Remote Sensing 6, no. 11: 10947-10965. https://doi.org/10.3390/rs61110947