1. Introduction
The use of unmanned aerial vehicles (UAVs) for atmospheric research is rapidly growing. Their ease of deployment and high maneuverability allows them to sample areas otherwise inaccessible with conventional platforms, particularly within the planetary boundary layer of the troposphere (0.1–1 km altitude). For example, suborbital research aircraft with onboard pilots do not fly over populated areas at low altitudes, volcanoes, or into severe weather for safety reasons. Remote sensing measurements from satellite do not have the vertical or horizontal spatial resolution to identify local sources, sinks, and distributions of air pollutants and trace gases within the Earth’s boundary layer. Tethered balloons and kites can provide vertical resolution measurements but only over a single location, and their deployment is limited to specific weather conditions.
UAV platforms have also demonstrated promise for atmospheric chemistry field studies. For example, UAVs have been successfully deployed over volcanoes [
1] and over the Arctic Ocean sea ice [
2]. A fleet of UAVs was coupled to ground-based measurements to help understand radiative heating profiles in the lower troposphere [
3]. Greenhouse gas sensors have flown successfully on the NASA SIERRA Unmanned Aerial System (UAS), and novel insights into boundary layer emissions of greenhouse gases were observed (
http://www.nasa.gov/centers/ames/news/releases/2011/11-45AR_prt.htm). Larger UAS, including the NASA Global Hawk, fly regular missions focusing on upper tropospheric and lower stratospheric measurements.
Substantial payloads are now routinely lifted by unmanned aerial vehicles, particularly for optical imaging. Several UAV platforms have been used in environmental applications primarily focused on geographic surveying and high-resolution temporal and spatial imaging to complement LIDAR and satellite measurements [
4,
5]. However, there remains a significant technology gap in the development of high-performance, high-sensitivity trace gas sensors for the more common, less expensive, and smaller UAVs that have payloads on the order of 1 kg. As such, no laser-based trace gas sensors have been developed specifically for small UAVs. Laser-based optical detection is widely used in various atmospheric, industrial and biomedical applications [
6–
9]. Laser-based sensors are selective, sensitive, fast, compact, and consume low power (specifically, tunable diode lasers)—essential requirements for deployment on small UAVs as well as obtaining scientifically-robust measurements.
In this study we demonstrate the development, laboratory experiments, and flight testing of novel laser-based UAV sensors for the three most important greenhouse gases: water vapor (H
2O), carbon dioxide (CO
2), and methane (CH
4). Water vapor is the most dominant greenhouse gas in the atmosphere due to its ability to strongly absorb infrared radiation, act as a means of transfer heat from the Earth’s surface to the atmosphere through latent heat of evaporation and condensation, and through cloud formation which impacts the solar and infrared radiative budgets [
10–
13]. Unfortunately, water vapor concentrations in the lower atmosphere can vary by nearly four orders of magnitude and show extreme heterogeneity in space and time [
11]. Carbon dioxide is the most important anthropogenic greenhouse gas, but local-to-regional emissions and sinks are complicated by a lack of high spatial measurements within the boundary layer. Likewise, while the overall atmospheric budget of methane is well known, the spatial and temporal distribution of its emissions to the atmosphere are poorly constrained.
To this end we developed optical sensors which provide a compact, cost effective, fully autonomous, low-power and non-intrusive probe to measure trace gas species in the atmosphere. The measurement technique is based on laser absorption spectroscopy which uses a low power vertical cavity surface emitting laser (VCSEL) in the near-infrared spectral region. A VCSEL typically operates at 5–10 mA of current with a 5 V power supply to scan absorption features of atmospheric gaseous species of interest. The most suitable absorption line transitions available within spectral coverage of commercial VCSELs were used to maximize performance. In order to enhance the sensitivity and time response of the sensor we employ wavelength modulation spectroscopy (WMS) [
9,
14–
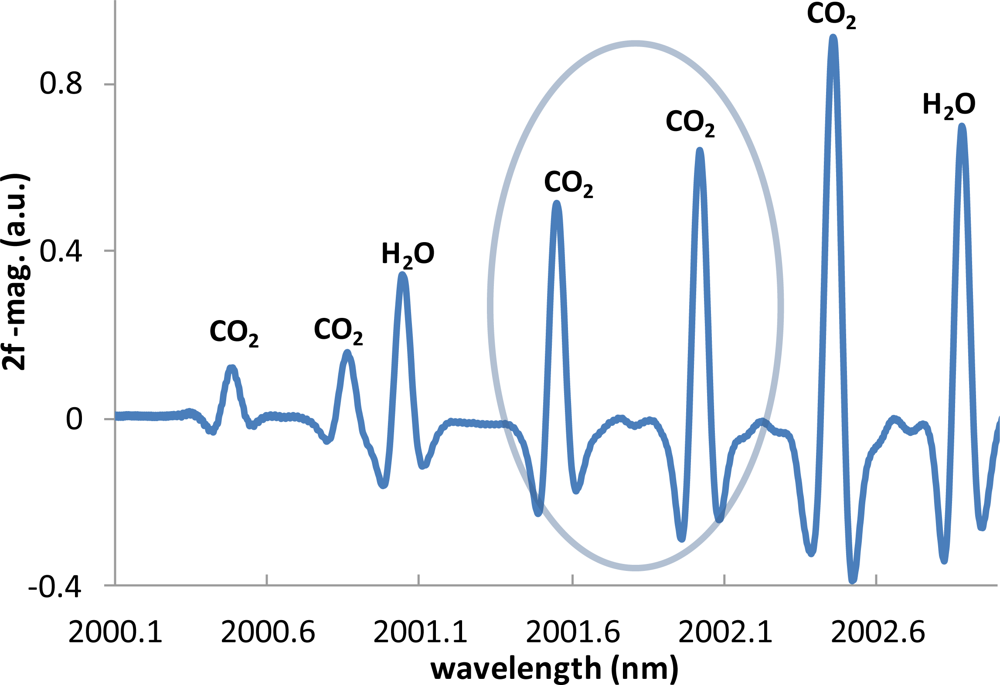
17], which inherently reduces any backgrounds associated with parasitic laser scanning and modulating effects and interfering molecular transitions. For example, in a typical IR spectrum there are several regions of significant overlap from water vapor molecular transitions. These strong water vapor transitions or their line profile wing regions interfere and affect accurate measurement of gaseous species more significantly in direct absorption spectroscopy than WMS. In addition, WMS higher harmonic detection also aids in reducing interference and resolving overlapping gaseous species [
18], thus providing more accurate information of the trace gas species. In addition, the combination of fast wavelength scan and modulation minimizes interference from laser 1/
fL noise resulting in measurements that are promising for several atmospheric sensing applications.
Robotic airborne vehicles (acrobatic helicopters and planes), when coupled with VCSEL-based sensors, allow for fast, robust, and cost-effective sampling of the atmospheric boundary layer. In this study we demonstrate the feasibility of trace gas laser-based sensors to measure greenhouse gas concentrations with high vertical and horizontal resolution within the atmospheric boundary layer. The sensors are designed for the goal of improved concentration estimates and vertical profiles of carbon dioxide, methane and water vapor (CO2, CH4 and H2O), and the data will be used to model their emissions more accurately. The VCSEL-UAV sensors were successfully test-flown on a robotic helicopter (TREX Align 700E) in order to demonstrate the sensors precision, stability and performance on this unique sensing platform. The initial prototype shows short term field precision of less than 1%, mass of 2 kg, and power consumption of 2 W.
2. Sensor Design
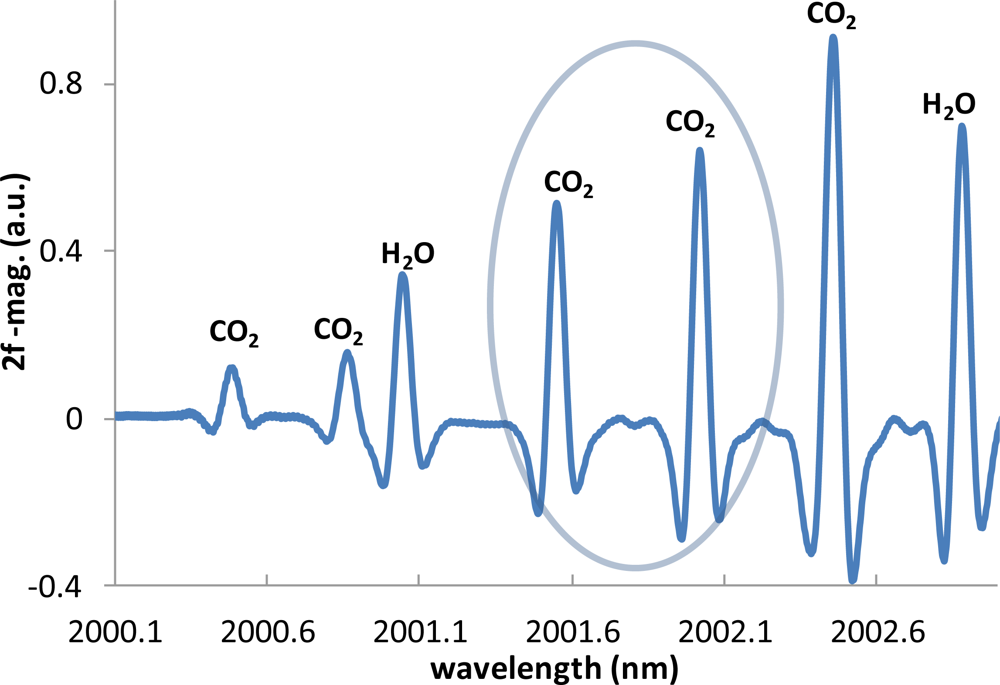
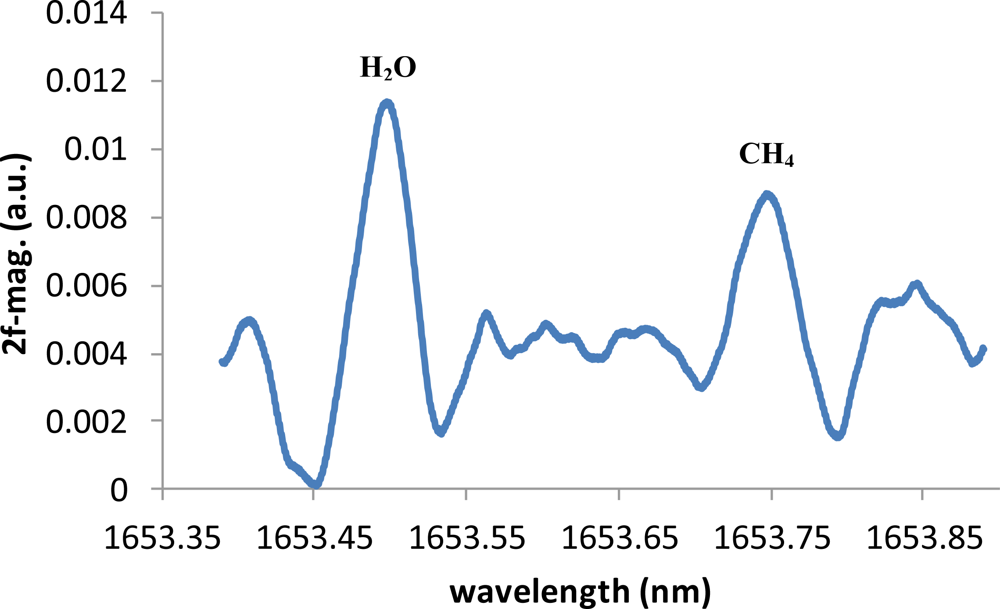
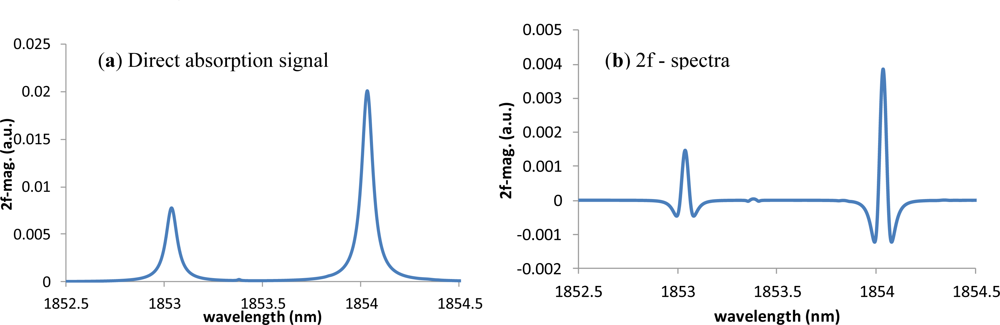
The sensors developed for UAV applications are based on laser absorption spectroscopy. The basic sensor design includes a VCSEL (to measure CO
2, CH
4 and H
2O at 2,004 nm, 1,654 nm and 1,854 nm wavelengths, respectively), a cylindrical multi-pass cell [
19] for appropriate optical pathlength (0.1–20 m), and a 2.2 μm extended InGaAs photodetector and laser drive, detection and signal processing electronics. The WMS measurement technique has been described in detail previously [
14–
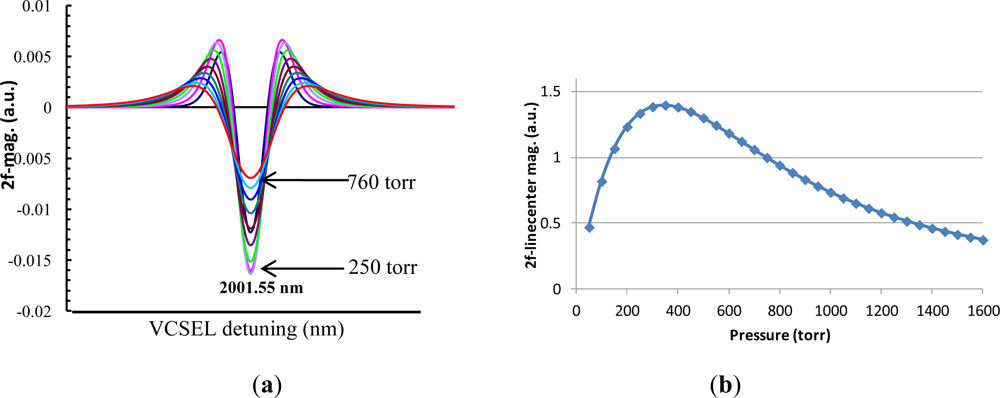
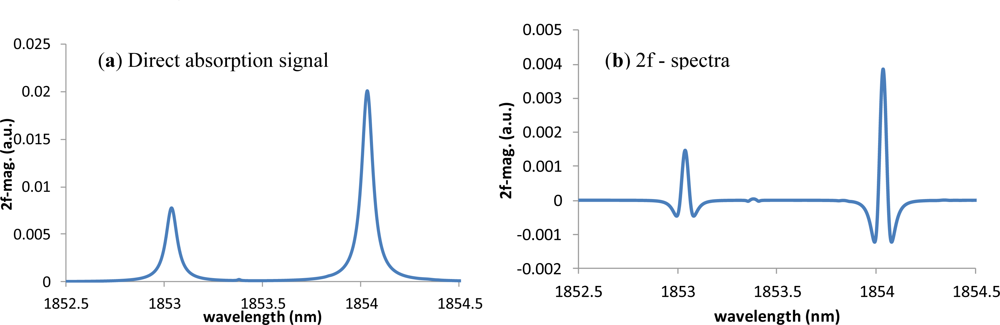
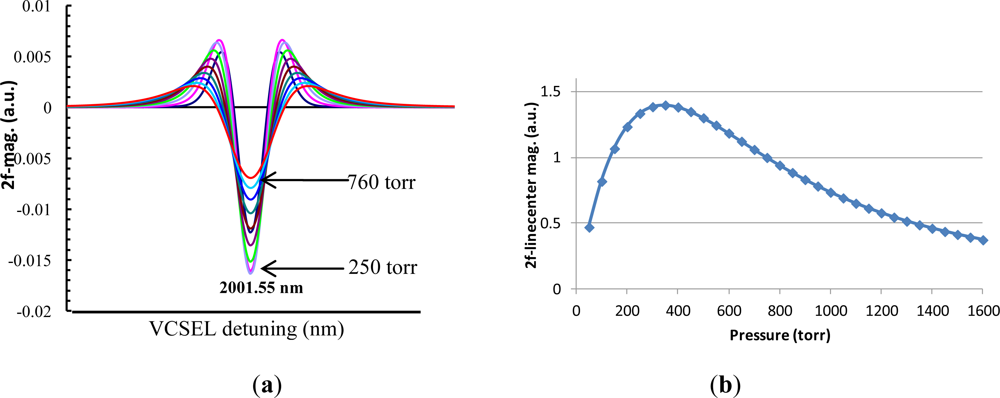
17]. The tunable diode laser is tuned to near an absorption line by controlling its temperature and the injected DC current. A sinusoidal modulation current (10 kHz) is introduced along with a 50 Hz sawtooth current ramp (very slow compared to the modulation frequency) which sweeps the laser wavelength across the absorption feature. The (modulated) detector signal is demodulated at fundamental and various integral multiples order of the modulation frequency—also known as phase sensitive detection. The resulting WMS signal has a derivative-like feature of the absorption lineshape profile, which attributes to the sensitivity of the measurement technique. In WMS the most common detection scheme is 2f (where f is the modulation frequency) because the 2f signals yield maximum SNR compared to higher harmonics. In our measurement scheme we used 2f and 4f detection based on optimal sensitivity of measurements. Both 2f and 4f WMS signals are symmetric and peak at the linecenter value of the absorption profile. Therefore, peak to trough height of a typical 2f signal is used to extract the information about the concentration of trace species being measured. The fundamental physical spectroscopic parameters from the HITRAN database were verified and simulated using laboratory and field measurements. This includes the collision linewidth, absorption cross-sections and lineshape function.
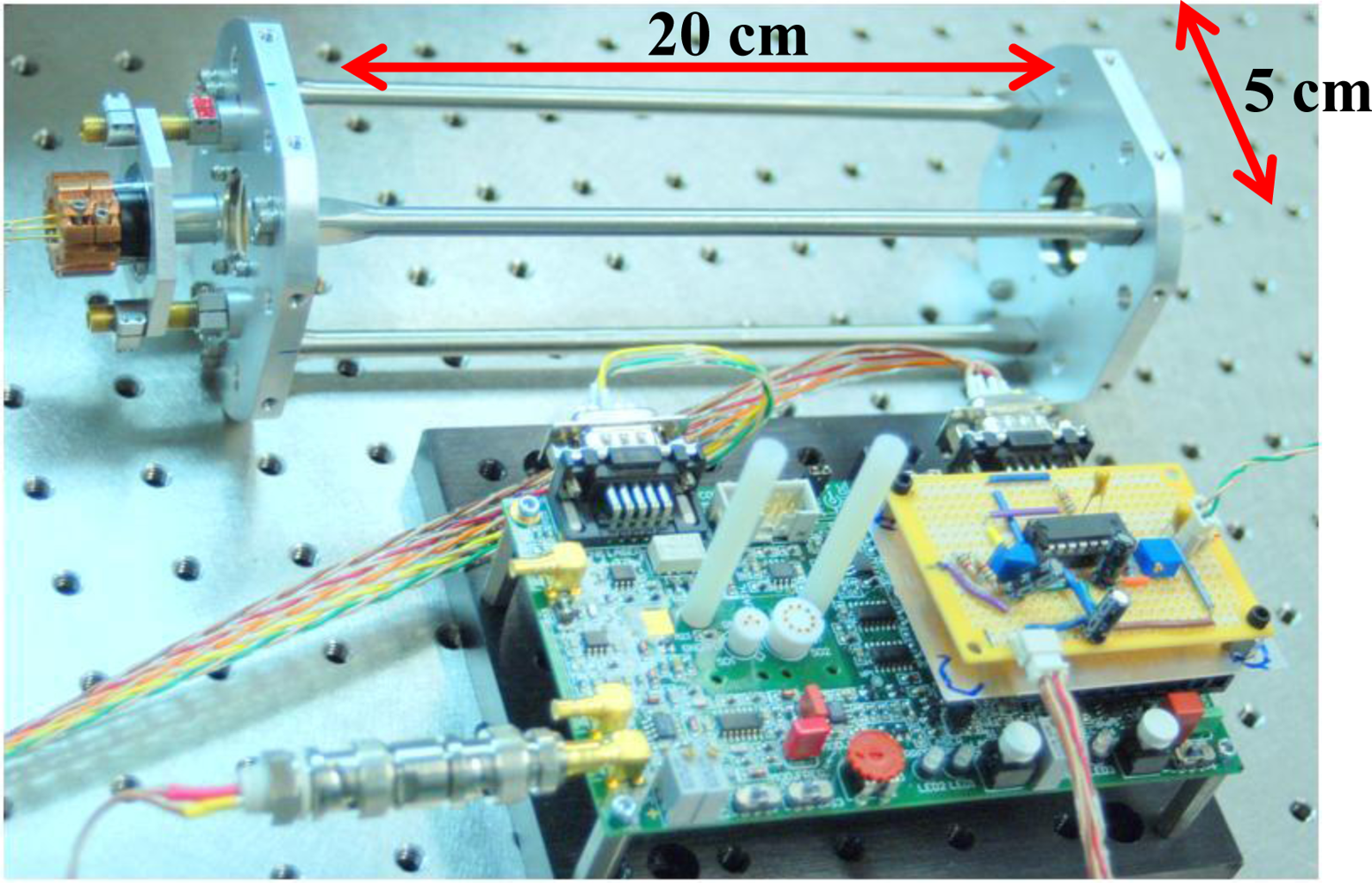
Optomechanically,
Figure 1 shows the CO
2 sensor frame and multi-pass cell within an integrated VCSEL and photodetector on opposite ends. In general we used cylindrical, protected gold-coated mirrors of 20 cm and 50 cm focal length to obtain various optical pathlengths depending upon the species of interest. The beam from the VCSEL is highly divergent; therefore, we used a 2 μm antireflection-coated geltech-collimating lens from Lightpath Lens Technologies. A collimated beam from a VCSEL (VERTILAS, GmbH) is guided through a hole in one of the mirrors, and it is periodically reflected and refocused between the mirrors [
19]. After a designated number of passes M, the beam exits through the hole (in this case from the rear mirror), in an N/2 configuration (where N is the nominal number of passes for a reentrant cylindrical pattern) and collected onto the detector. The center hole of the mirror was 3 mm in diameter, which was sufficient to channel the collimated laser beams into the multi-pass cell. The absorption pathlengths and mirror beam patterns were optimized by choosing 2f-spectra of corresponding patterns that had the least fringing and scattering from the edges of the hole of the second mirror of the multi-pass cell.
The laser was operated from a Thorlab VTC002 diode laser current driver, thermo electric cooler (TEC) module, and a custom electronic board for current sweep and modulation. The laser current ramp and sine modulator was developed using XR2206CP function generator integrated circuits. In addition, an arduino-based microcontroller was used for data and GPS logging of the sensor’s flight path. The modulated signal on the photodetector (extended wavelength Indium Galium Arsenide, InGaAs, 2.2 micron (0.25 mm2 active area) Teledyne Judson Technologies) is then demodulated at 2nd, 4th and 6th harmonic of the fundamental (modulation) frequency with a PC board lock-in amplifier (Femto Electronics—LIA BVD-150). The laser drive electronics were placed in a 20 × 10 × 10 cm enclosure. The electronics board was powered using combination of Lithium polymer (LiPo) and Lithium ion batteries. The spectral data were acquired, averaged to 1 s, and recorded on a data logger (MSR 160, sample and recording rate of 1 kHz).
4. UAV Specifications and Sensor Flight Tests
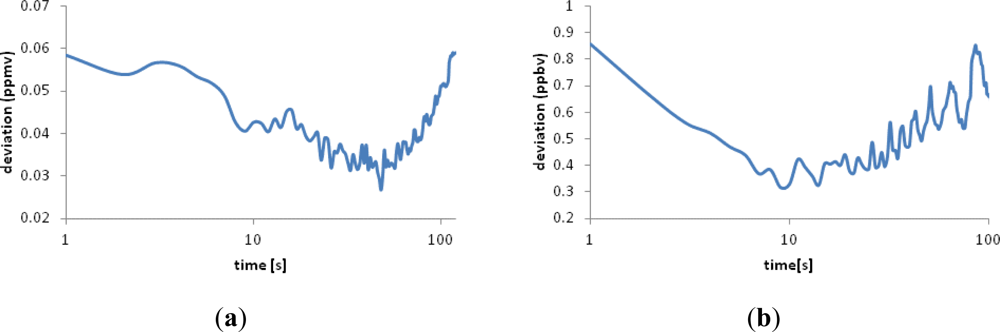
The overall size of each sensor is 20 cm × 5 cm × 5 cm with a mass of ∼2 kg or less including batteries. The sensor is battery-operated with electrical power consumption of 2 W and capable of performing autonomous operation (trace gas WMS detection and onboard data acquisition). All sensors were test deployed on the ground at the field site, prior to their flight testing, to assess their stability and precision. In addition, additional tests were conducted prior to flight testing to ensure no significant changes occurred from the earlier laboratory results. The estimated precision for 1 s averaged data was comparable to the laboratory tests. Signal averaging improves the precision by the inverse square root of integration time up to 10 s or higher based on fringe backgrounds affecting the system.
The UAV used for flight testing was the UT-Dallas Align T-REX 700E robotic helicopter (
Table 1) with payload capacity of up to 5 kg depending on the required flight durations and other payload constraints. The UAV is a flybarless acrobatic helicopter. It is 133 cm long, 41 cm high, has a main rotor diameter of 156 cm, with a flying mass excluding payload of approximately 4.7 kg. The helicopter operates with a dual 5,500 mAh LiPo battery pack and has been flown with an additional payload of 7 kg. The sensor was mounted on a bar that projects in front of the helicopter forward of the main rotor downdraft.
The sensors were flown at a University of Texas at Dallas field site in Richardson, Texas. The UAV helicopter (
Figure 8) was operated at airspeed of 15 m·s
−1 to obtain greater spatial resolution than conventional aircraft sampling strategies.
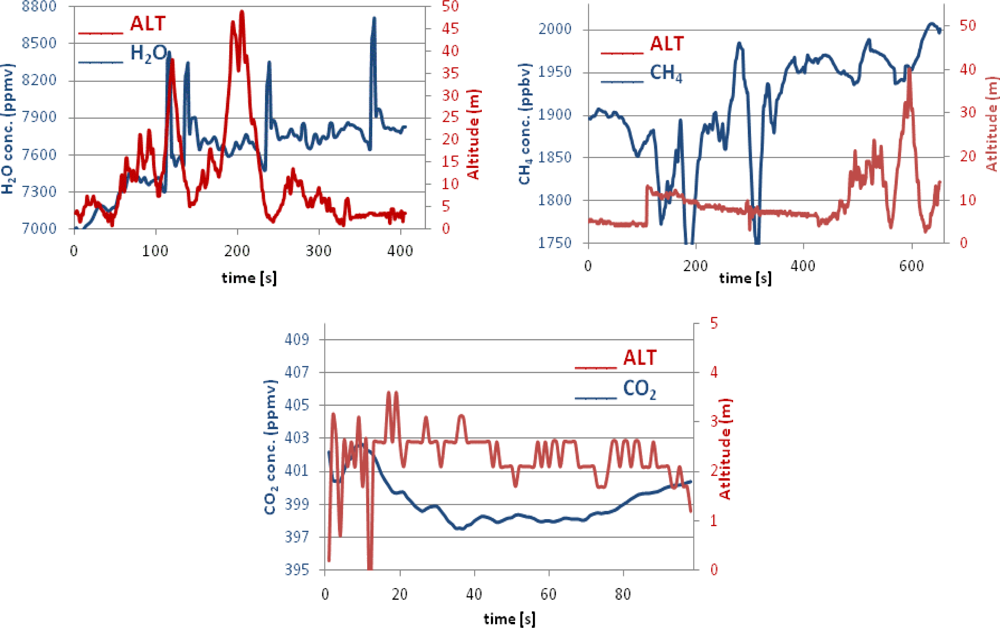
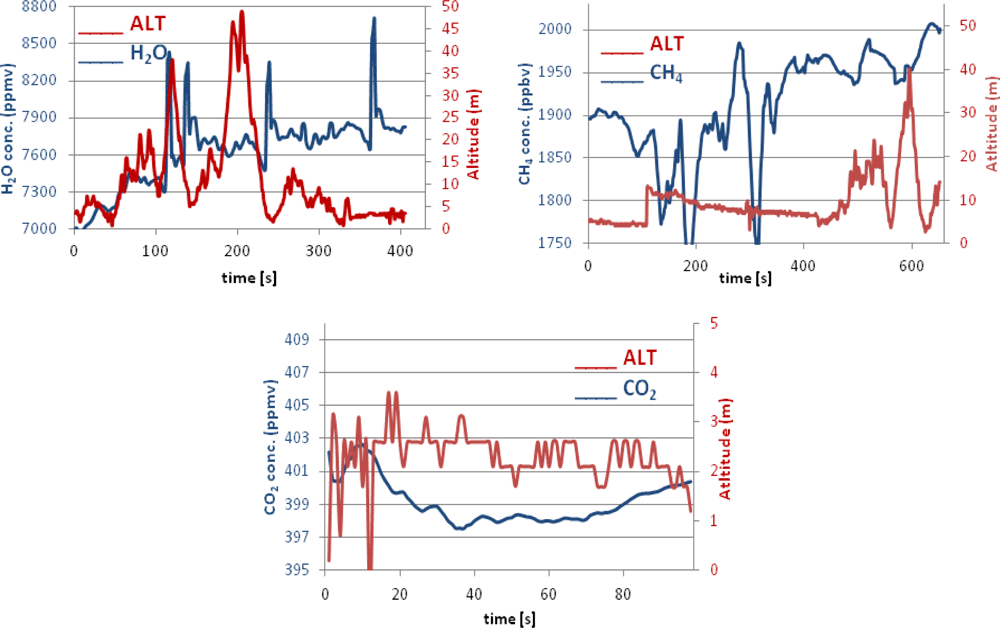
Figure 9 shows representative time series of vertical/spatial timeseries of CO
2, CH
4 and H
2O measurements to probe atmospheric variability of these gases. The changes observed during in-flight measurements were much greater than the sensor precision over these durations. For the purposes of the test flights we assumed nominal atmospheric levels of the trace gas species, as full calibrations were beyond the scope of the test flights. The figure shows flat regions during flight operation which were used to estimate the short term precision of the sensor during flight. For example, the estimated in-flight precision at 1 Hz for CO
2, CH
4 and H
2O was 0.1 ppmv, 2 ppbv and 20 ppmv, respectively. The total flight duration varied from 5–10 min and over this entire duration we estimate the longer-term precision (drift) in the sensors was around 1%. The flight duration was primarily constrained by the battery capacity of the helicopter used during flight tests. During the flight test all critical sensor controls, e.g., VCSEL current, laser temperature detector dc amplitude were continuously monitored and found to be stable during the entire flight operation. Therefore, in most test flights there were no apparent electromagnetic interferences, static, or mechanical vibrational issues affecting the performance of sensors’ electronics or their optomechanical alignments.
CH
4 and CO
2 are largely invariant (1–5%) in the atmosphere at levels near 1,800 ppbv and 400 ppmv, respectively. Thus, the relevant figure-of-merit for measuring these species is the precision rather than the detection limit. Both gases require precision <1% to be relevant for identifying significant local sources and sinks. In contrast, H
2O is more variable in the atmosphere, and thus the detection limit and dynamic range are more important than the precision (< 2%).
Table 2 summarizes each gas in the lower troposphere (5 km) and observed measurement figures-of-merit for both laboratory as well as in-flight precision. Note that the short-term (1 Hz) in-flight precision is a worse-case scenario for precision as at least some of the variability is expected to come from real atmospheric variations. However, we again emphasize that over the course of the flight, other factors such as laser temperature stability and etalons degrade the effective precision to around 1–2% at these longer timescales.
5. Conclusions
The Robotic unmanned aerial vehicle (UAV) coupled with low power vertical cavity surface emitting laser (VCSEL) trace gas sensors can be an effective technology for monitoring trace species in regimes that pose challenges for aircraft and land-based atmospheric sensors. We have demonstrated compact, lightweight (1–2 kg), high-frequency (1 Hz), and cost-effective laser-based UAV sensors for high spatial (∼1 m) sampling of the three most important greenhouse gases—water vapor, carbon dioxide, and methane—with flight precisions of less than 1%. Therefore, UAV trace gas sensors are ideal for mapping plumes close to the ground from a diverse variety of sources. The UAV sensors can be used for satellite validation in the atmospheric boundary layer, horizontal and vertical mapping of local pollutants and greenhouse gases, meteorology, and understanding ecosystem dynamics (e.g., carbon uptake in a forest canopy). In addition, with only slight modifications to the sensors described in this project, mid-infrared quantum cascade laser sensors can be developed to probe a larger suite of trace gas species that have higher sensitivity and selectivity in the mid-infrared spectral region [
23]. Future efforts include developing an in-line reference cell and numerical algorithms to improve stability and long-term precision to levels approaching our current 1 Hz precision, increased software functionality for spectral analyses and concentration values reported in real-time, and more robust intercomparisons with other sensors. Finally, we note that the sensors, while demonstrated here on a specific robotic helicopter, are readily adaptable for use on many other UAVs and even ground-based sensor networks in remote regions where power is limited. Future plans include validation with vertical profiles of greenhouse gases obtained from sensors on tall towers and ground-based [
24], atmospheric trace gas profile networks.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}