1. Introduction
Wireless sensor networks have been recently applied to a wide variety of both civil and military applications. They consist of a large number of sensor nodes generally deployed in different environments and are designed essentially to detect events or natural phenomena, collect, process and transmit sensed data to interested users [
1].
The recent improvements in sensing, communication and computing technologies contributed to increase the penetration of WSN in everyday life, in order to perform tasks like intrusion detection, target tracking, environmental monitoring [
2], remote sensing and global surveillance, among others [
3]. Thus some of the applications foreseen for WSNs will require multi-platform systems with a high number of different devices of the order of many hundreds nodes: the different types of sensors may completely differ in nature of the device (e.g., fixed or mobile), size, computational and energy capabilities, functions to be performed, parameters to be measured, topology and mobility patterns.
Especially considering the high-efficiency required in terms of power management, we focus our attention on the communication issue that is the most expensive in the entire sensor network power budget. Moving from sensor nodes to the network server, the system generally increase in compute power, data storage and power availability. However, along with the inherent characteristics of actual environments in which sensor networks are deployed, sensor network modeling and design represent a very complex and sophisticated process and performing system optimization is fundamental to make realistic the employment of such new technologies for real life applications.
The energy constraints of sensor networks, especially when their size increase, represent an additional aspect to be taken into account. For this reason the authors decided to investigate the effectiveness of evolutionary algorithms to optimize network lifetime in a limited power supply framework, mainly focusing on communication strategies [
4]. With the continuing advances in network design, RFIDs, smart phones, and other wireless mobile devices, optimization in the communication layer is needed not only to extend the system lifespan, but also to increase reliability, availability and integration efficiency. These concurrent aspects represent a typical multi-objective problem.
In the last decades several evolutionary algorithms have been developed for the optimization of different kinds of engineering problems. All these algorithms are population-based heuristic search techniques, which can be used to solve general combinatorial optimization problems, modeled on the concepts of natural selection and evolution, or based on cultural and social behaviors typical of the swarm intelligence. More tests have been performed to further demonstrate the algorithm robustness and a new interface has been developed in order to adapt this hybrid algorithm to WSN domain [
5].
Section 2 presents main WSN concepts and critical issues while Section 3 describes how UAVs can be integrated in WSN. In Section 4 we discuss the WSN optimization problem and illustrate the procedure we developed to apply an Evolutionary Optimization method to WSN model. Section 5 describes the considered network model and some assumptions we made before performing the numerical simulations. Finally, numerical implementation and results for wireless sensor network optimization are reported in Section 6.
2. Wireless Sensor Networks
WSN can be categorized in various ways, depending on the network architecture, communication coverage area, and communication protocol. The simplest topology we can imagine is a hierarchic architecture where sensor nodes gather data autonomously, and the network passes these data to one or more base stations, which finally forward the data to a sensor network operating center server. Before designing and installing any system, it is necessary to understand its physical environment and deployment in detail. Another important issue is whether the sensors’ locations are known a priori: there are situations in which some of the sensor locations are known, and other circumstances in which sensor locations are unknown and can be estimated from the whole of the other sensor data [
6].
In particular, considering the network architecture, we have infrastructure-based network, which have a fixed structure, and infrastructureless networks, which are dynamically formed by cooperating independent wireless devices. If we consider the covered area, briefly we can categorize wireless networks as wireless wide-area Networks (WWANs), wireless metropolitan-area networks (WMANs), wireless local-area networks (WLANs) and wireless personal-area networks (WPANs) [
7]. WSN can be classified also considering the communication protocols, as shown in
Table 1.
WSNs possess several characteristics that have challenged many aspects of traditional computer network design, such as the scalability issue caused by the large amount of sensor nodes, the infrastructureless network due to additional mobile sensors, and the stringent resource onboard the sensors. These new features call for a re-design of overall structure of applications and services: in particular the computational complexity distribution on different devices must be investigated.
Certainly the large amount of sensor node causes scalability problem. A centralized approach sends data from each sensor to a fusion center (or processing center) where data processing and fusion are carried out. This approach works well when the number of sensor nodes is relatively small and the data file needs to be transferred is not large. However, when the amount of sensor nodes increases considerably, the centralized approach will not scale. A natural solution to this problem can be the distributed approach. Distributed sensor network (DSN) has been studied extensively since early 1980s. Wesson
et al. [
8] were among the first to propose the design of DSNs. Since then, several efficient DSN architectures have been presented in the literature, including the hierarchical and committee organization, the flat tree network, the de Bruijn based network, and the multi-agent fusion network (see [
9] and references therein).
In order to diminish the effects of node failures, multi-path routing schemes have been developed on top of these algorithms, but the resource demands are quite high. Collaborative signal and information processing over a network is an important area of research and is related to distributed information fusion.
Processing data from more sensors generally results in better performance but also requires more communication resources especially in terms of energy. Similarly, less information is lost when communicating information at a lower level, but it requires more bandwidth.
Fusion approaches range from simple rules of picking the best result to model-based techniques that consider how the information is generated. Here the efficient and intelligent usage of battery becomes also a most challenging issue: again there is a trade-off between redundancy and energy constraint [
9].
Typically, WSNs use static sinks and multi-hop forwarding to collect data from sensor nodes. In this architecture the nodes close to the sink tend to consume more energy in relaying data from other nodes. In particular, the use of DSN even with mobile sensor requires algorithms capable of assuring a proper coverage [
10] and the use of mobile sinks to significantly extend the lifetime of the sensor network [
11].
In addition, parameters detected by one node have to be associated with variables detected by nodes of different kind to avoid duplication and enable fusion. Optimal data association is computationally expensive and requires significant bandwidth for communication [
12]. To face this problems several approaches have been proposed by employing mobile sinks and by improving the cooperation between nodes [
13] and by iterative partitioning and hierarchical clustering based mechanisms [
14], by using suitably defined protocols to reduce network traffic [
15].
Thus, modern multi-platform sensor networks can provide a new kind of instrument that enables us to observe and interact with physical phenomena in real time at a fidelity that was previously unexpected, as described in the next section.
3. UAV Interaction in Mobile and Heterogeneous WSN
The constant increase of unmanned aerial vehicle (UAV) research programs and relative technologies have allowed to implement systems able to satisfy the requested features so far particularly for surveillance and monitoring operations [
16], but many efforts are still needed to develop such systems for civil applications [
17], especially in the field of hi-resolution image processing [
18] and multimedia services, which represent the main target of this work.
In the last few years low-cost micro and mini UAV systems equipped with light-weight geosensors such as video cameras have started to appear in the market [
19]. These UAV systems are mostly instrumented with low quality GPS sensors basically for position and flight parameters control. Over the same time period, web-based interactive 3D geo-information solutions have evolved into virtual globe technologies, which have had a significant impact on the geo-spatial industry within a few years. Typical advanced applications are represented by UAV-based augmented monitoring, real-time geo-referencing and integration of video imagery with virtual globe systems.
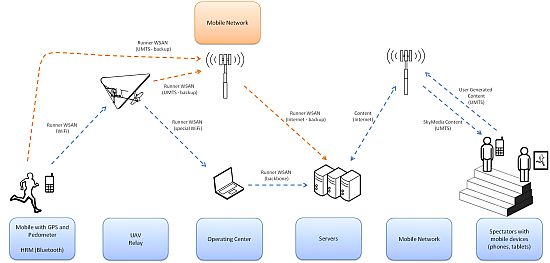
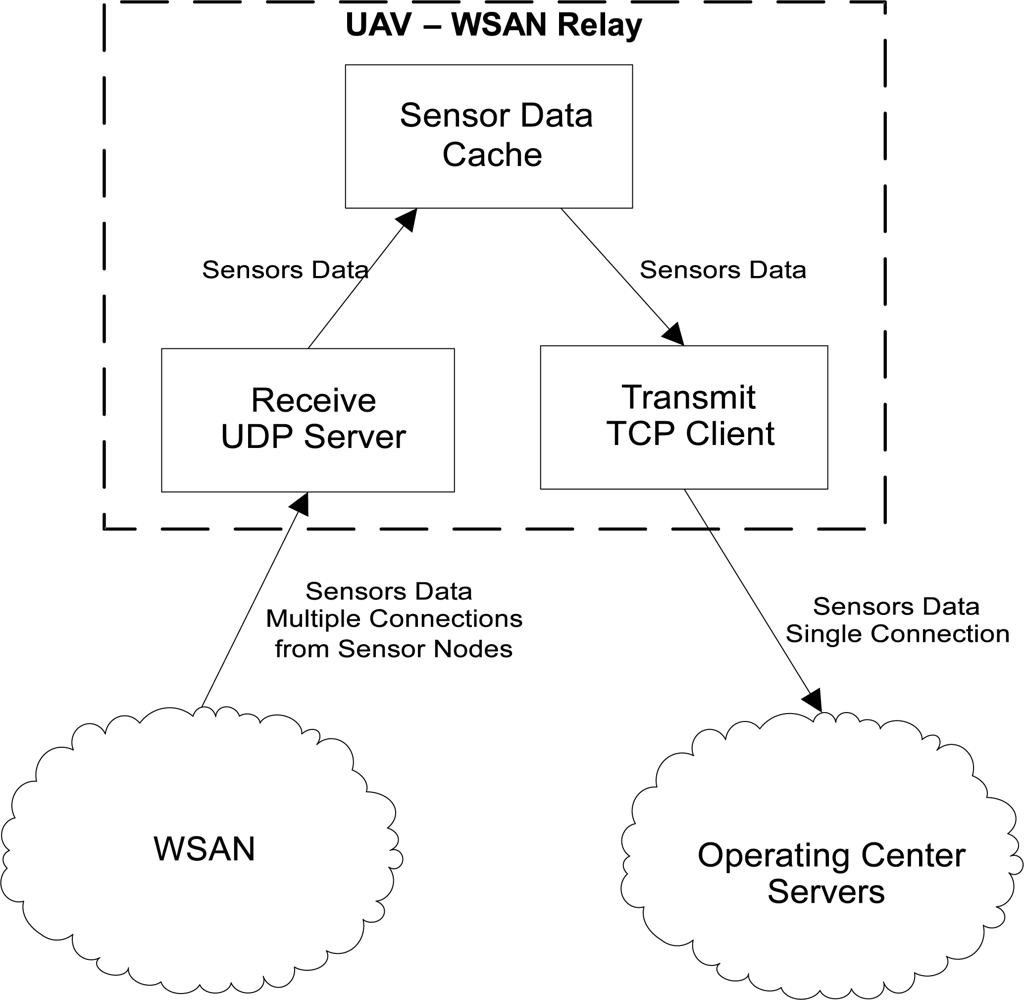
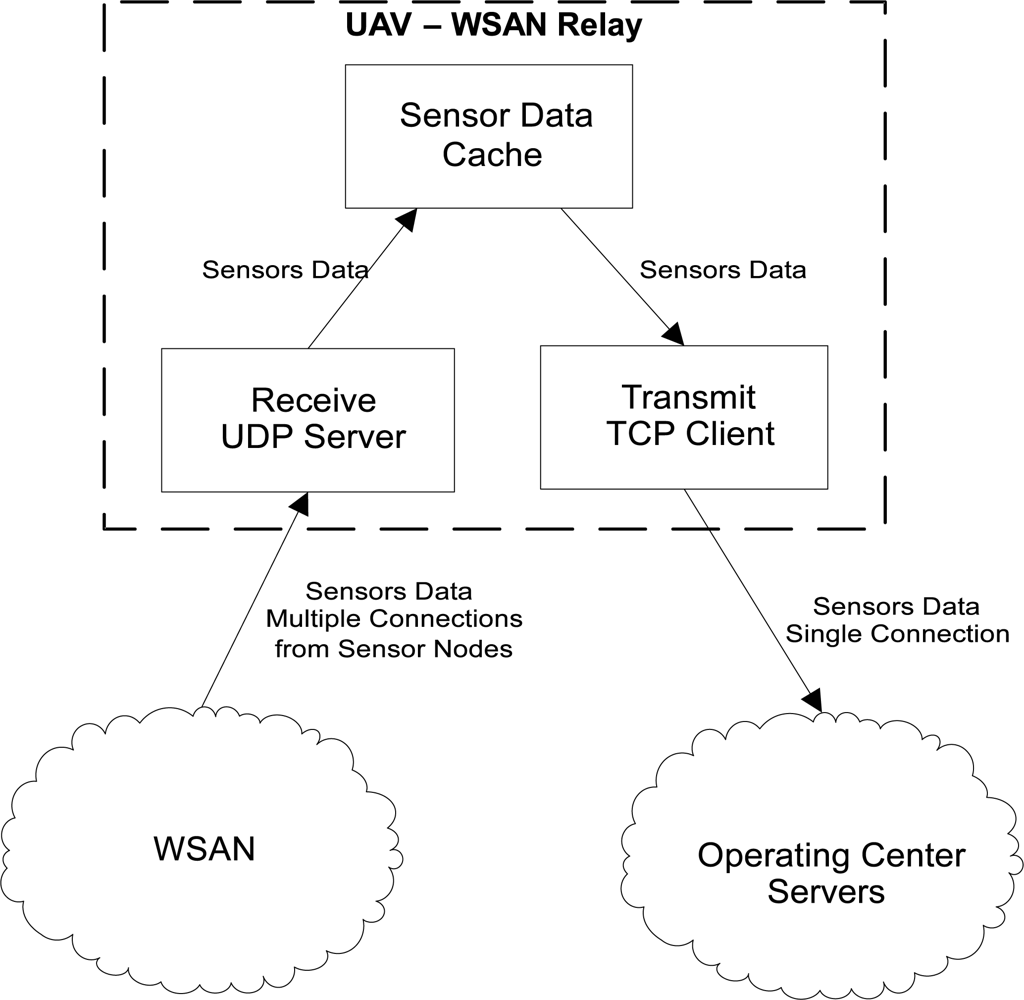
Low cost UAVs are increasingly useful also in remote sensing operations and, in the context of recently funded EU projects, they are potentially capable to revolutionize the multimedia services during particular special events [
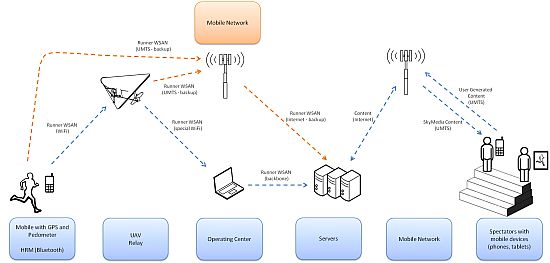
20]. They can represent a much cheaper alternative to manned vehicles (helicopters and other traditional aircrafts), and they are ideally suited for missions that would be inadvisable for human pilots. Furthermore managing a system of UAVs connected with a terrestrial sensor network can be also a result of interest for their abilities to perform simultaneous coverage of very large areas: UAV platforms can operate as a sink of WSN ground sensor nodes, essentially acting as a mobile gateway or intermediate node, as shown in
Figure 1.
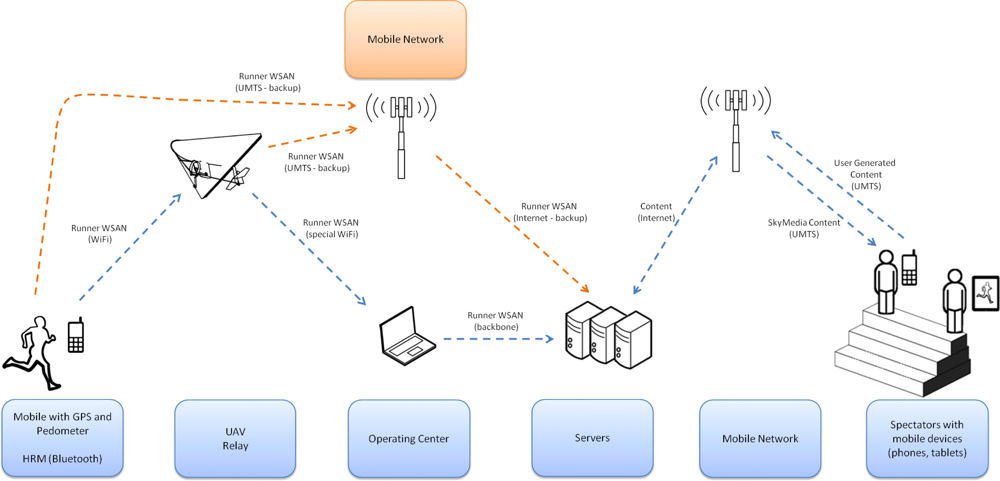
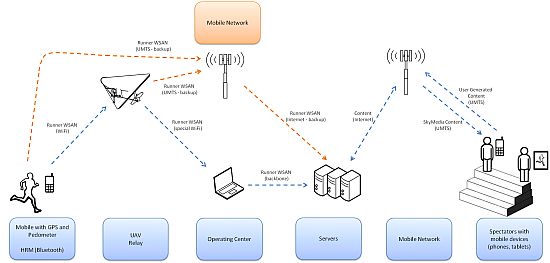
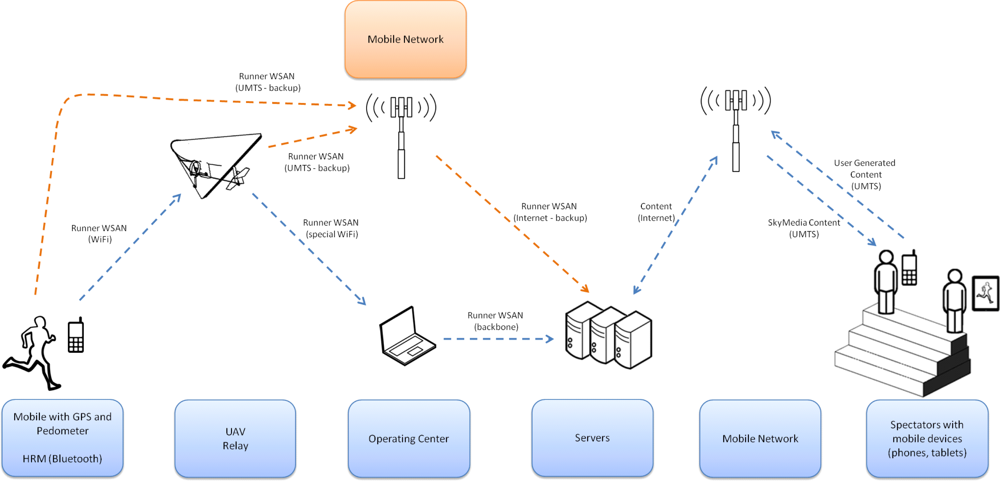
In this context an open field of research is represented by the integration of unmanned aircraft systems (UAS) into advanced multimedia user services. For example, as shown in
Figure 2 the capabilities of UAV systems to be integrated with wireless sensor networks and communication devices will open up new concepts in providing media services, improving also real-time navigation, as well as traditional aircraft related topics such as collision avoidance and formation flight.
According to multimedia technology progresses, devices are becoming more and more accessible and related challenges are partly shifting from the technological aspects to the identification of innovative use cases.
In this light, the SkyMedia project [
20] targets to demonstrate the ability to enhance the level of immersiveness and interactivity of the services provided to four different user categories during an existing Marathon race event. The SkyMedia service should provide advanced services focused onto different target users.
Considering the sports event organizer needs, it is possible to deploy different kinds of sensors, both fixed and mobile. For example both mobile sensors placed under the runner shoes or suit and fixed sensors and cameras placed along the marathon path or by the side of the city roads can provide information about the competition itself. Typical information can be represented by the athlete health status, his relative position in the race, shifting from his best previous performance, deviation from the race record and so on.
Valuable information could be offered to the runner after the race by summarizing and sharing to him all the gathered data about him obtained from wearable (bio-sensors) and other sensors. In the case of mobile terminal the developed applications can offer an immersive experience by associating recorded data, video stream and 3D models of the location of the event. Users with mobile terminal may also upload information/rich media content (photos/images). The mobile context (location, end-user) can also be stored and used to create interesting views of the event.
4. WSN Optimization
As described in the introduction, sensor networks are emerging as an important field of study in different technological areas and offer a rich domain of active research. These complex systems use technologies essentially from sensing, communication and computing fields, and combine at the same time many design issues of wireless communication and mobile computing.
The future vision of large multi-platform networks makes it even more attractive in multimedia and other sensitive applications. Performing the processing at the source can dramatically reduce the computational cost of networking and management; therefore WSN organization should be autonomously performed with a minimum of human interference. Minimizing energy consumption certainly is the key requirement when designing sensor network protocols and algorithms. Since sensor nodes are equipped with small and very limited batteries, it is crucial for the network to be energy efficient in order to maximize network lifetime. However further requirements for a well designed system are represented by the fault tolerance property, network scalability, reliability and of course low production costs as much as possible.
Generally sensor network applications require quality of service guarantees suggesting the need for global network cost optimization. Many different approaches have been used in the WSN optimization research field. For example in [
21] the authors present an approach for optimizing global cost in sensor networks through greedy local decisions at each node, and they explore the benefits of this approach in reducing the idle listening at individual nodes in order to reduce the global network energy cost.
In [
22] an approach based on genetic algorithms (GA) is proposed to optimize design of application-specific WSNs with connectivity and energy conservation limitations. The authors develop a fitness function to incorporate different aspects of network performance, including the status of sensor nodes (active or inactive) and the choice of appropriate cluster heads, but still referring to a single-hop routing scheme.
A model of meta-heuristic optimization algorithm such as ACO (Ant Colony Optimization), basically inspired by the behaviour of ants in finding paths from the colony looking for food, has been used in [
23] in data gathering and communication for WSNs, assuming unlimited energy for the base station and comparing its results with LEACH and PEGASIS algorithms [
24,
25], again following a cluster based approach. A similar approach can be found in [
26], but this time the ant colony optimization is applied with respect to an
ad hoc network where nodes are not fixed. In [
27] a global multi-hop routing strategy for heterogeneous sensor networks is proposed mixing tiered and clustered architectures through some heuristics.
In applying evolutionary techniques to WSN design, critical issues must be considered to trade off between different objectives:
to reduce the amount of power wasted by wireless devices;
to increase the network lifetime;
to achieve fault tolerance in case of individual node failure;
to allow network scalability and deployment;
to reduce bandwidth requirements, enhancing collaboration among nodes (e.g., data fusion) since the limited wireless channel bandwidth must be shared among all the sensors in the network.
Before building the objective function and performing the optimization, it is important to understand the main sources of energy loss in operation of wireless sensor networks in order to make more effective the optimization process itself. Basically the two main sources of power consumption are represented by communication or computation tasks [
28]: communication involves essentially the use of transceivers while computation is related with processing aspects due to the chosen protocol and data compression techniques.
The goal of protocol development for environments with limited power resources is to optimize the transceiver usage for a given communication task. Thus, to optimize such a complex system is a major issue especially in terms of energy savings.
Certainly GAs are used more frequently in route optimization due to the combinatorial nature of the problem and generally they are limited to a single-hop cluster approach as in [
22]. Both Particle Swarm Optimization (PSO) and GA can be found in literature applied to target localization and sensor placement [
29,
30], even if PSO seems to be less common than the other algorithm in this field.
We chose a multi-hop routing strategy for its intrinsic capability to avoid hidden terminals and saving energy at the same time. Multi-hop wireless networks essentially use two or more wireless hops to convey information from a source to a destination, and this strategy allow to save energy on condition that a proper path optimization is performed. After having first identified several design issues, the next section describe in more details the network model of the specific infrastructure to being optimized.
The Genetical Swarm Optimization (GSO) algorithm was conceived as a hybrid evolutionary technique developed in order to combine in the most effective way the properties of GA [
31] and PSO [
32] and to overcome the problem of premature convergence.
The basic concepts of GSO have been presented in [
5]: in every iteration, the population is randomly divided into two parts which are processed by GA and PSO techniques respectively. Then the fitness of the newly generated individuals is evaluated and they are recombined in the updated population which is again divided into two parts in the next iteration for the next run of genetic or particle swarm operators.
In particular, in [
5], the authors presented some performance comparisons of GSO and classical method, emphasizing the reliability and convergence speed of the first one and applying it to different case studies. In these previous experiments, for example in large EM optimization problems, the algorithm proved to be a fast and robust technique, outperforming classical procedures.
5. Network Model and Assumption
In this paper we consider a wireless sensor network with a ground layer defined in a flat two-dimensional rectangular area where we randomly place n nodes. In order to assure a complete coverage of the selected area and a medium connectivity of the network we also put some other constraints on the minimum and maximum distance among nodes. Moreover the base station has higher computational capabilities and it is equipped with a different type of transceiver with a bigger transmitting range that allows it to reach the whole network
We assume that the energy loss due to channel transmission is proportional to the square distance between sender and receiver. Thus, for the nodes that communicate in a round of the simulation, the energy cost of transmission (ETx) and receiving (ERx) are calculated as a consequence.
According to [
4] a simple radio model has been used in this work, where the radio dissipates
Eel = 50
nJ/bit to run both the transmitter and receiver circuitry, and
for transmit amplifier to achieve an acceptable signal to noise ratio. An
r2 energy path loss due to channel transmission is also assumed and thus to transmit a
k-bit message to a distance
d using this model, the single sensor node expends:
while to receive the same message the radio expends:
We make also the assumption that the energy needed for the transmission of one bit of data from node P to node Q is the same as to transmit one bit from Q to P (symmetric propagation channel).
We simulate the transmission of data from every node to the base station through a random sequence of senders. At each round of simulation a sender has to communicate the sensed data to the base station performing a multi-hop communication to reach it. At the beginning of each round the base station updates the topology of the network removing the dead nodes and calculates the next optimal path. Since it has no power constraints, the base station can broadcast the results of its search to the entire network and synchronize the network clock. The nodes receive the information sent so they know if they will participate in the next route. The control overhead to synchronize the network clock is taken into account within the system simulation, as described in [
4] and further detailed in Section 6.
The base station can easily update the battery level of the network at each step since collision and packet retransmission are avoided and only few nodes participate to communication. Thus, it is possible to calculate directly the energy waste associated to a single transmission (proportional to the distance between sender and receiver) and automatically update the battery level table after each round.
The key idea of this algorithm is to address all the computational costs to the base station, in order to apply the optimization in run-time—without affecting the power consumption of the sensor nodes, which are involved only in communication and sensing tasks—and to switch the sensor node to Sleep mode whenever possible. The other main idea is to use the GSO presented in Section 4 to perform the choice of the optimal path between base station and nodes. In this study we wanted to check the real capability of the algorithm in discovering the optimal routes without exploring the entire range of possible routes (the whole connection graph, described more in details in Section 6).
In literature there are different routing protocols that use one or more criteria to evaluate the efficiency of a route in terms of power consumption, link quality, message overhead, time delay in delivering packets, throughput. In order to prove the performances of the GSO we considered different metrics criteria, such as Maximum Available Power (MAP), Minimum Communication Power (MCP), Minimum Hop Number (MHN), and their combinations, as already described in [
4].
6. Implementation, Results and Discussion
As aforementioned in Section 4, the selection of the optimal path is here performed using the so-called GSO algorithm. The interaction between this procedure and the objective function has requested a novel approach to implement the original algorithm to fulfill the requirements of such a complex system.
To apply optimization to the sensor network optimization problem considered in this paper it is necessary to represent the network model by a directed graph G = (V, A) where the set of vertexes V represents the sensor nodes and the set of arcs A represents valid communication links. Each sensor node i ∈ V of the sensor network represents a vertex while a communication link between two nodes is described by an arc (i, j) ∈ A. A path is a sequence of nodes < i, j, …, k >, where i,j, …,k ∈ V, such that each node is connected to the next node in the sequence: to obtain this condition each arc (i,j), (j, …), …,(…,k) must be in the arc set A.
When dealing with evolutionary algorithms the main issue is to generate a proper route, in order to evaluate it under the constrains of energy limitations and objective function, namely the metrics defined in Section 5. The issue that was addressed by the authors is to generate only feasible routes of variable lengths, thus avoiding loops and non-feasible paths. Fortunately, the adjacency matrix A presents several important features that can be suitably considered to generate proper solutions to this task.
If
dij represents the Euclidean distance between nodes
i and
j and
dmax represents the maximum transmission range, a link between nodes
i, j exist only if
dij < dmax. According to this feature, the adjacency matrix
A can be dynamically updated by updating sensor power level after each communication, in order to remove connections associated to dead nodes: if
A is the adjacency matrix of the undirected graph
V of the network, then the matrix
An (
i.e., the matrix product of
n copies of
A) has an interesting property: the entry in row
i and column
j gives the number of paths of length
n from vertex
i to vertex
j (which is always finite if there are no directed cycles). Therefore, here the matrix
An is defined to be:
where, in our particular case, to avoid loops, the main diagonal of every level of the adjacency matrix is forced to have all zero entries, where all non-zero entries have been indicated with 1.
The generation of feasible multi-hop routes is therefore straightforward: if the number of nodes is N, the maximum number of arcs in a route is N − 1, therefore, knowing A1 = A (updated step by step, as aforementioned) it is just a matter to compute An ∀n ∈ [1, N − 1].
At each iteration of GSO, therefore, a particular individual is selected and its “genes” are decoded in a suitable route according to these simple rules: starting from the sender i, if i is connected to the destination node k, a non-zero value is present in the corresponding entry of at least one An. Therefore, a node j is chosen among those connected to i (by looking at A1) and then the process is repeated for this node j, considering now An–1. This iterative procedure ends to node k in at most N − 1 steps, thanks to An features, therefore enabling the creation of consistent routes of variable lengths. Loops can be easily removed by post-processing the node sequence of the generated route.
Once a feasible path has been identified, the GSO evaluates it associating a fitness score to it. Fitness function correlates closely with the algorithm’s goal: in our case the objective is the maximization of the following fitness score F, defined as a linear combination of the criteria previously described. Therefore the optimization technique is going to find out the best possible route among several ones by considering the abovementioned criteria, without having to explore the entire graph of all the feasible connections.
Before building the objective function and performing the optimization, it is important to understand the main sources of energy loss in operation of wireless sensor networks in order to make more effective the optimization process itself. Basically the two main sources of power consumption are represented by communication or computation tasks [
28]: communication involves essentially the use of transceivers while computation is related with processing aspects due to the chosen protocol and data compression techniques. A proper Medium Access Control (MAC) protocol should be able to balance between computation and communication costs, trying to solve all the typical problems that cause energy waste in WSNs [
33], namely: collision, overhearing, idle listening, and control packet overhead (“MAC protocol’s overhead”: frame headers, signaling,
etc.).
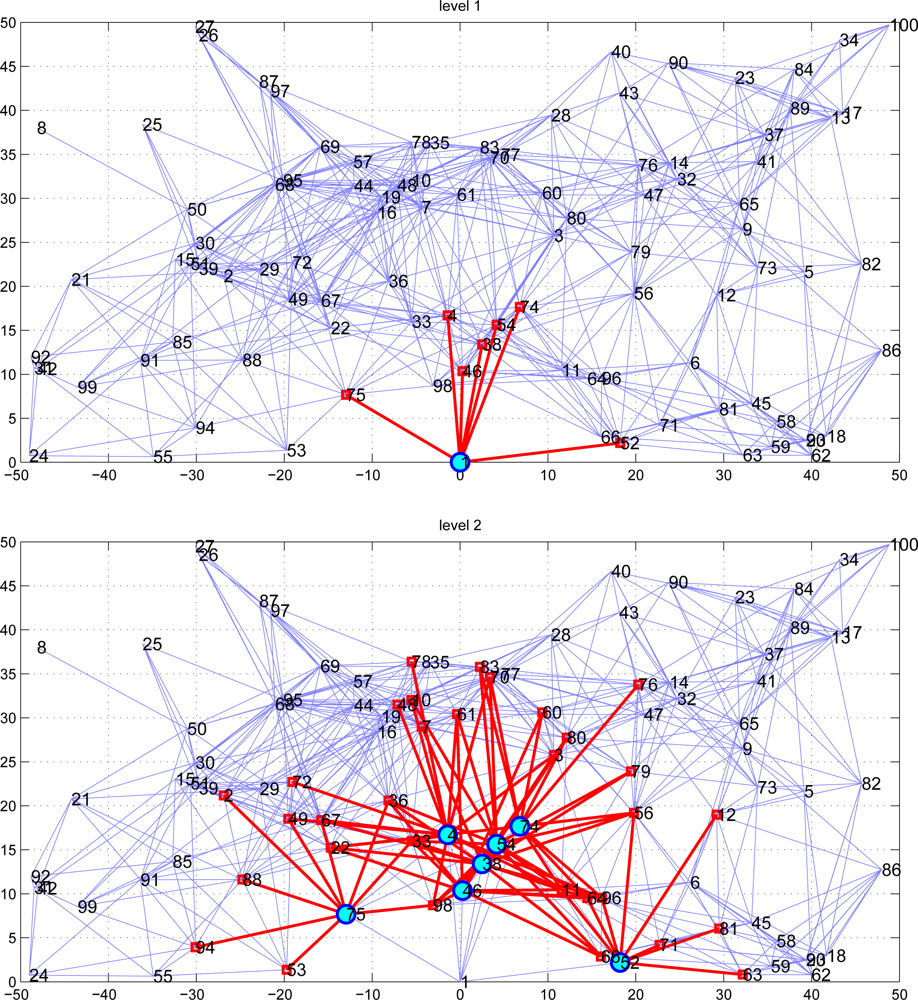
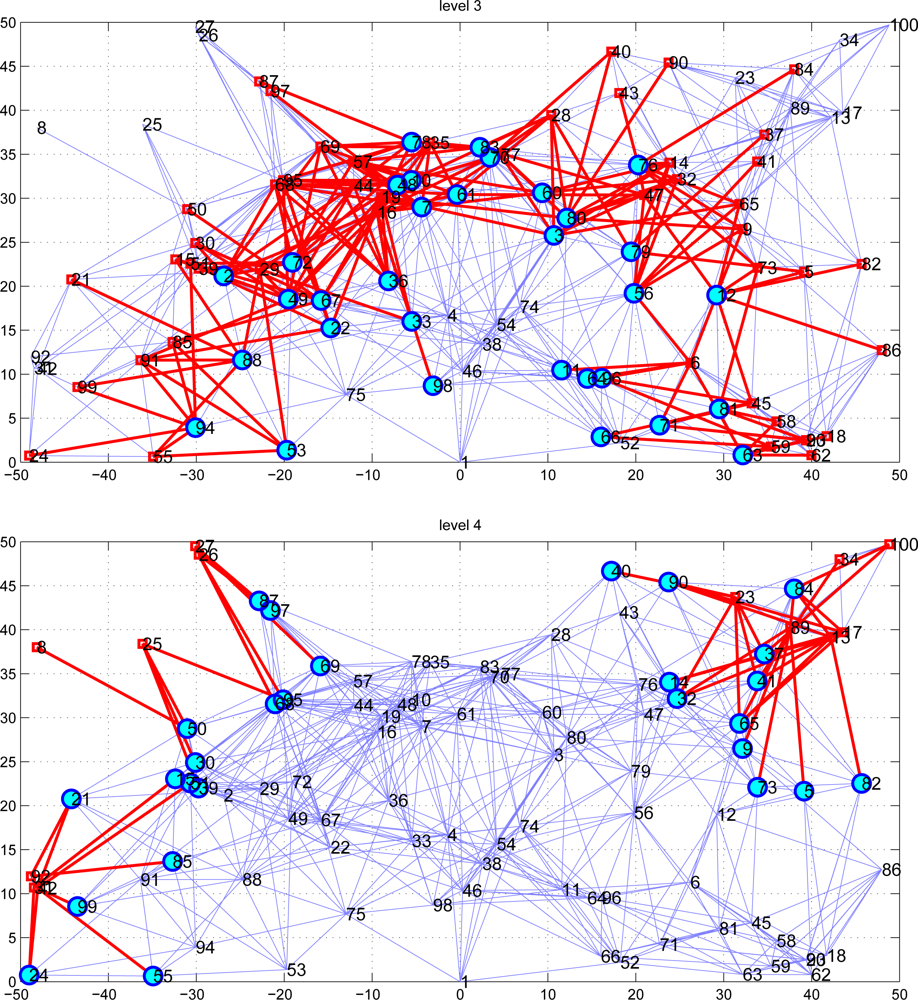
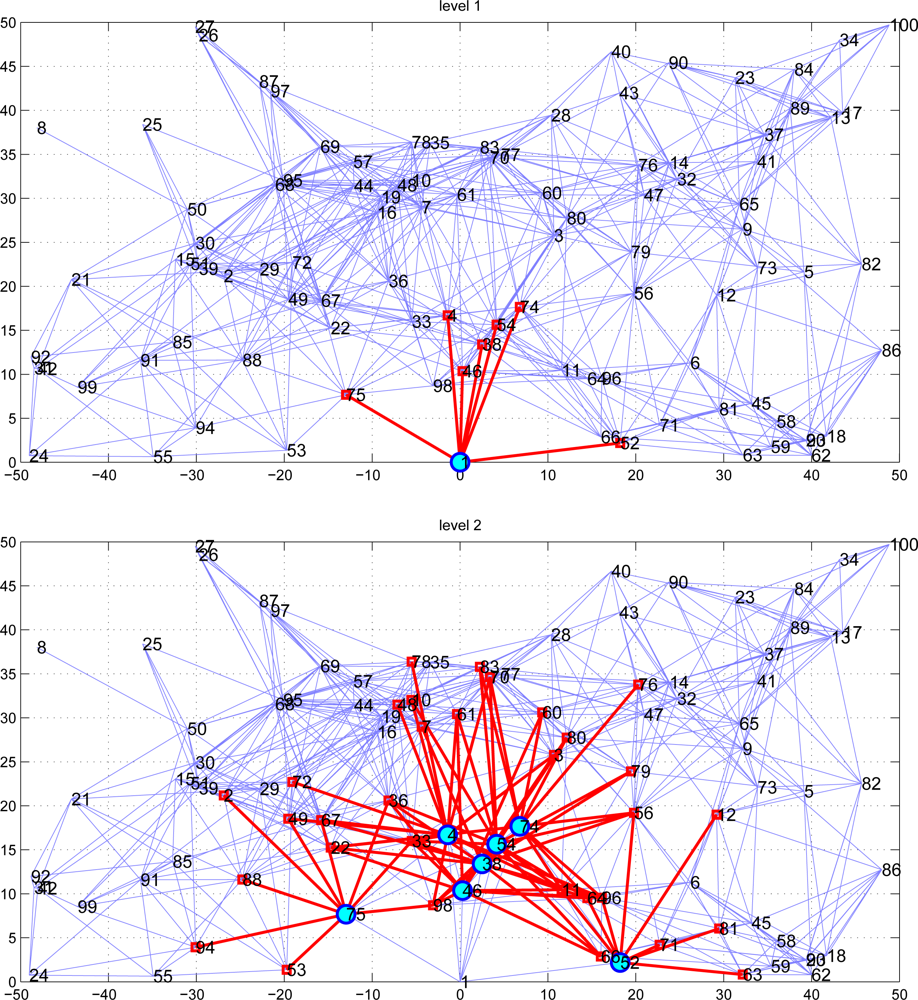
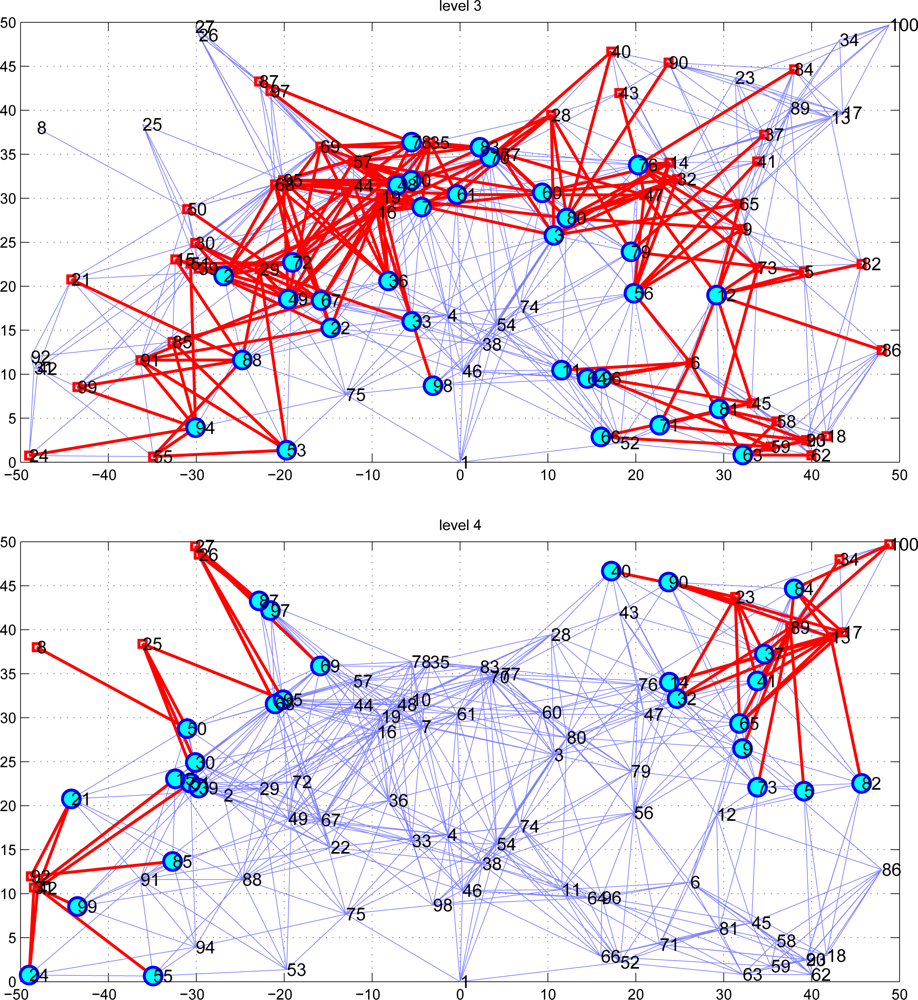
To validate the effectiveness and the reliability of the proposed technique for optimizing a wireless sensor network in a multi-hop routing scheme, the sample network of
N = 100 nodes shown in
Figure 3 has been generated.
We perform a series of
Ns = 10 independent simulations using the same random sequence of senders in order to evaluate and compare the performances of the selected metrics in terms of energy savings and enhancement of the connectivity of the network. For each sender of the sequence the GSO performs
Ni = 100 iterations in search of the best possible path accordingly with the adopted criteria. Being 10 the number of individuals in the considered population, the total number of function calls is limited to 1,000 per each GSO run. For each sender, an optimal route is defined by a single run of GSO and the network status and power level of each node are updated consequently. The best route is chosen by GSO according to fitness function which implements the set of rules presented in Section 5 and in [
4].
Figure 3 shows the connectivity of the network and the energy-efficient distributed clustering scheme proposed by the optimization algorithm.
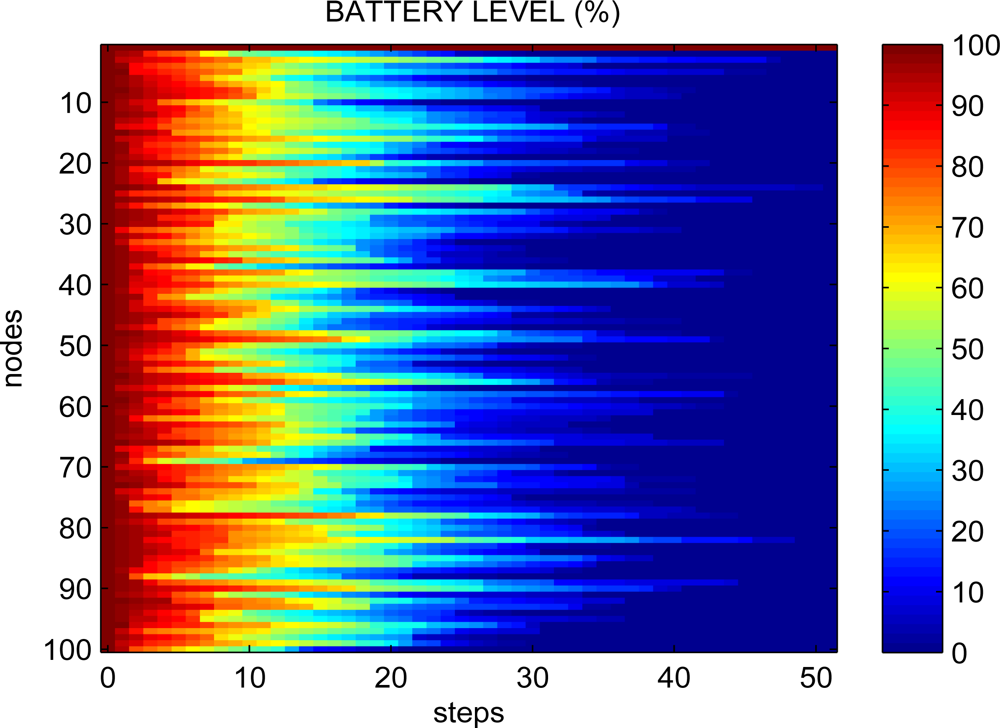
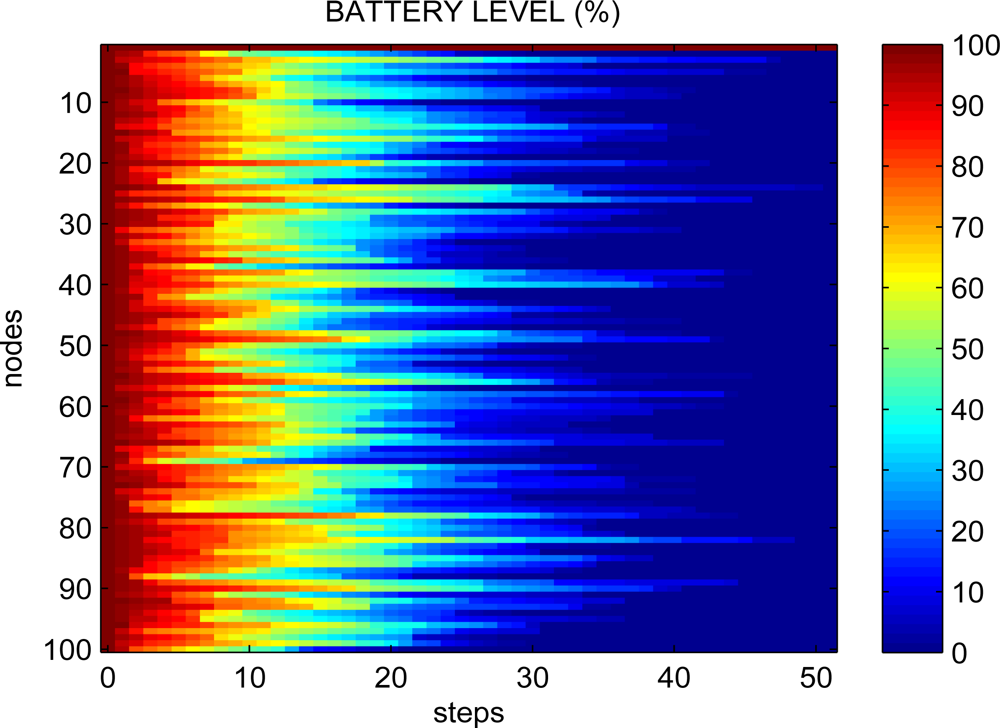
Figure 4 describes the depletion of the nodes’ batteries and is obtained as a mean of the values of each simulation performed using the same criterion. The power level of the sensors is updated after each round of the simulation and, as expected, the first node to exhaust their power are some of those positioned close to the base station.
Thus, sensor networks present significant system challenges involving the use of large numbers of resource-constrained nodes operating essentially unattended and exposed to potential local communication failures. It is difficult to reach an optimal solution which takes into account simultaneously different issues such as the reliable extraction of data from different distributed sensor nodes, accurate data reporting and efficient power management to extend sensor network lifetime. In particular, the obtained behavior reflects the ability of the optimization technique in optimizing the routes from several nodes to a mobile base station as the novel architecture implemented in the EU-FP7 SkyMedia Project [
20], under an energy saving point of view, in order to preserve the network functionality and to avoid premature death of the most solicited nodes. The use of such advanced bio-inspired computing techniques appears to be useful in this context especially in optimizing the network energy distribution.
7. Conclusions
Modern multi-platform sensor networks can provide a new kind of instrument that enables us to observe and interact with physical phenomena in real time at a fidelity that was previously unexpected. The resource limitations of WSNs, especially in terms of energy and bandwidth, require an integrated and collaborative approach for the different layers of communication, even in the case of mobile flying gateways (e.g., UAV platforms). When the amount of sensor nodes goes to hundreds and they are no longer fixed in the space, the centralized approach must be reviewed. The authors here propose an evolutionary technique to optimize the WSN lifetime considering to extend the same approach to heterogeneous networks with mobile nodes adopting a multi-hop routing scheme. In particular, in this paper this communication-efficient solution is extended to manage data distribution modeling in a complex multi-platform sensor system supported by a clustered structure of the network.
The key idea of this algorithm is to address all computational costs to the base station, in order to apply the optimization in run-time, without affecting the power consumption of the sensor nodes. Final results also suggest further improvements for the proposed technique to be extended to ubiquitous and cooperative networks for real life applications as suggested by ongoing research activities reported in this work. In this light a direct benefit for UAVs will be represented by a further development of its payload suite to answer to successful user applications in the multimedia market.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}