4.1. Multi-Image DSM Generation
For visual interpretation some detailed results are given in
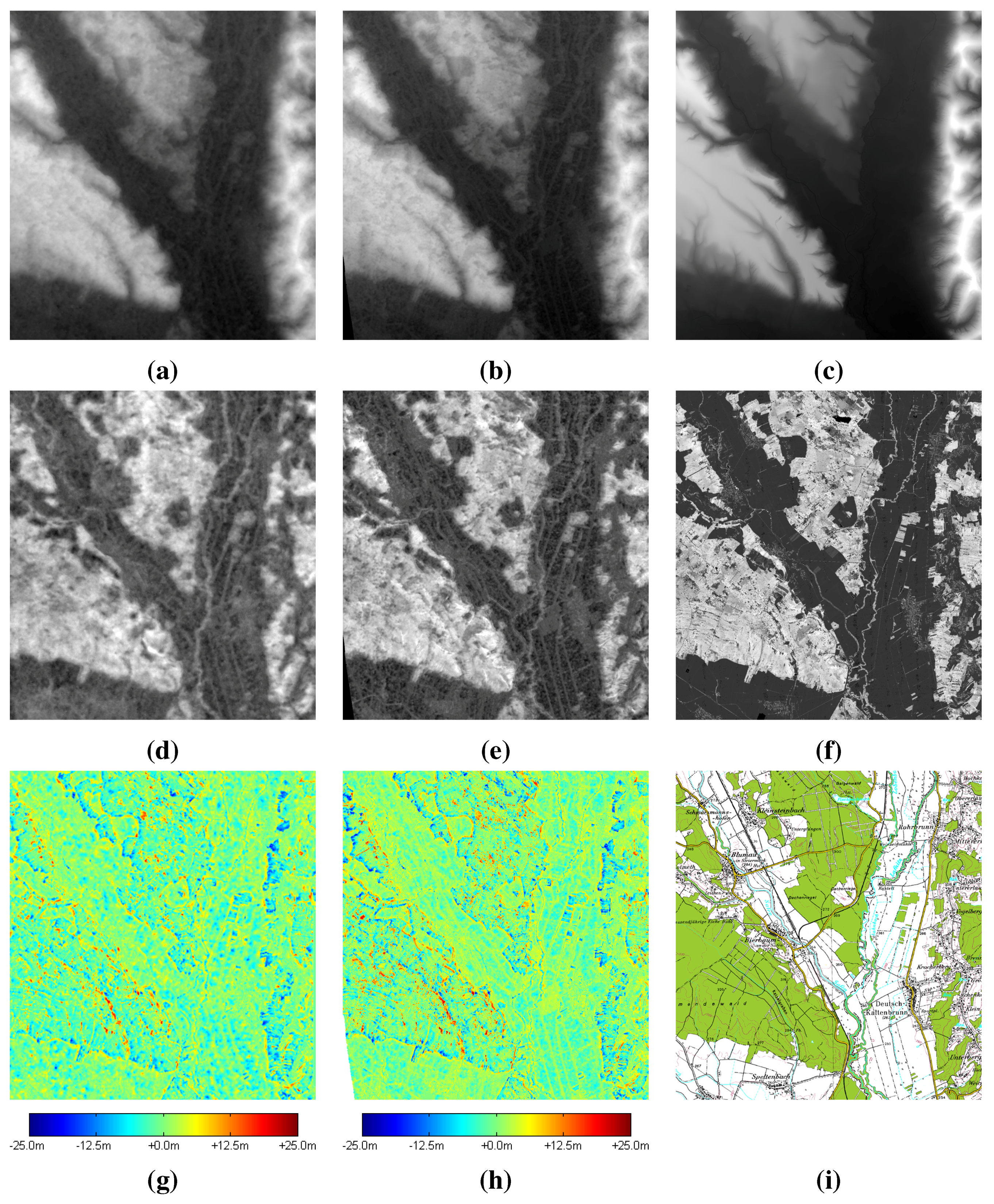
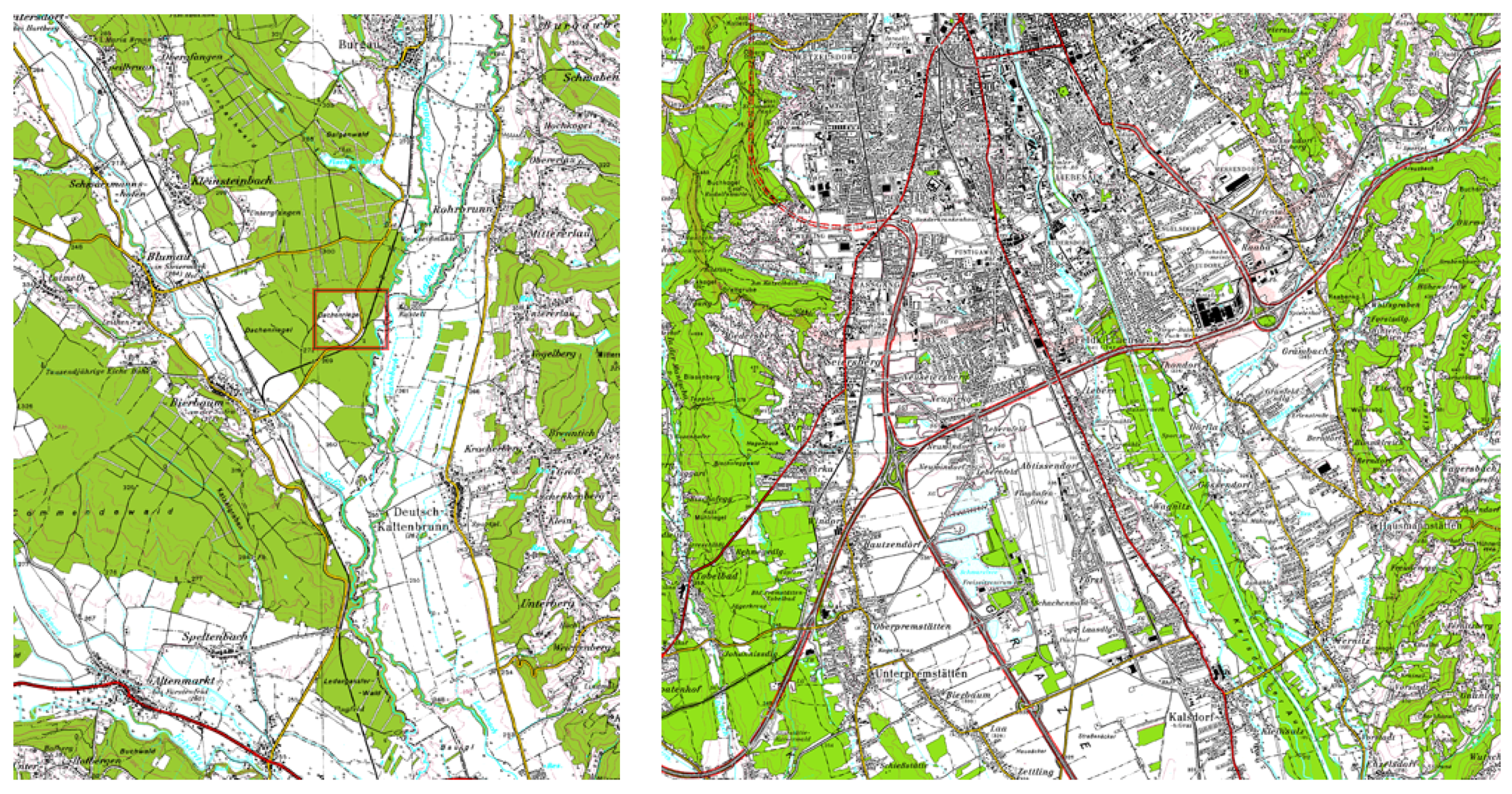
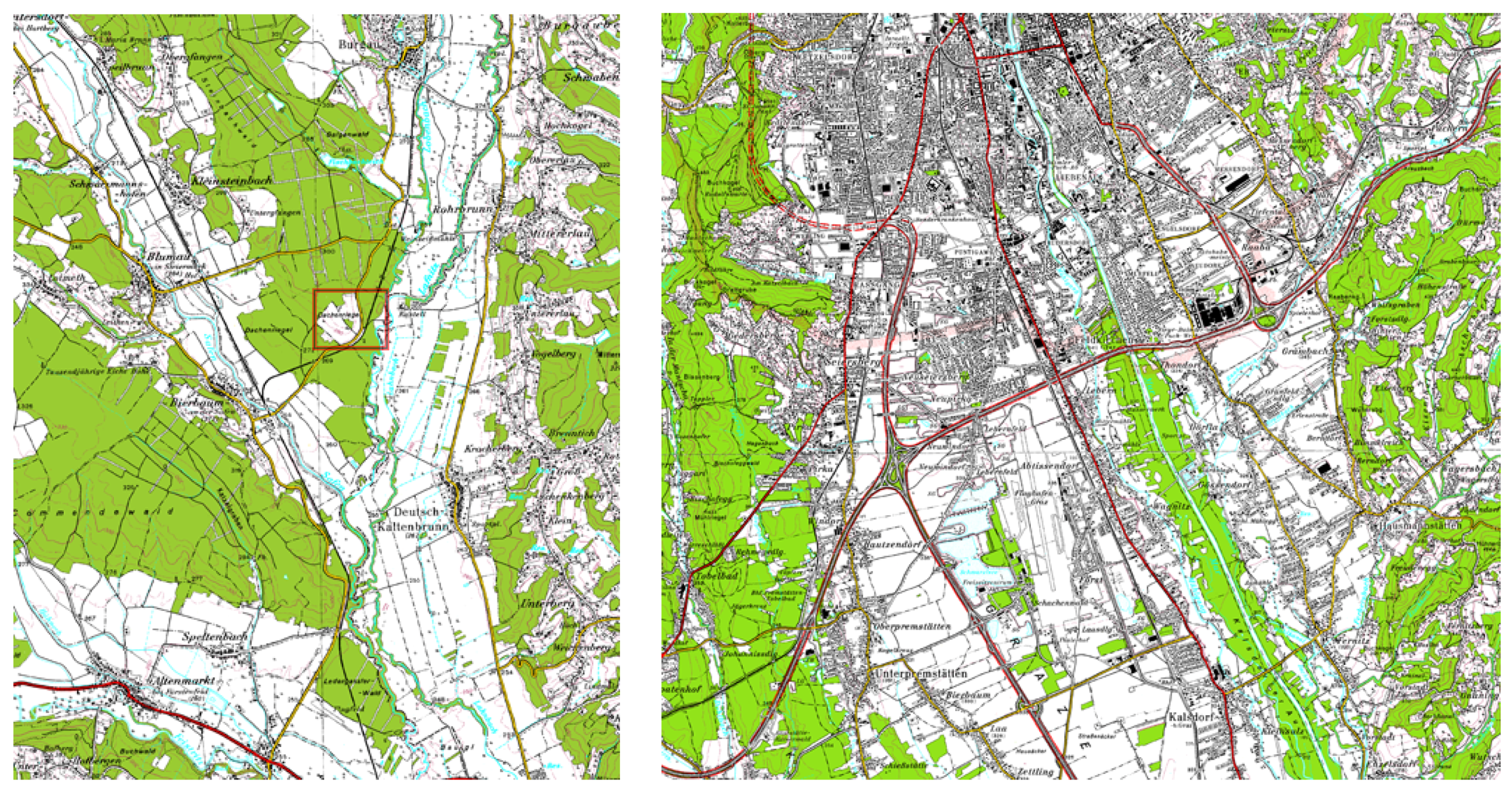
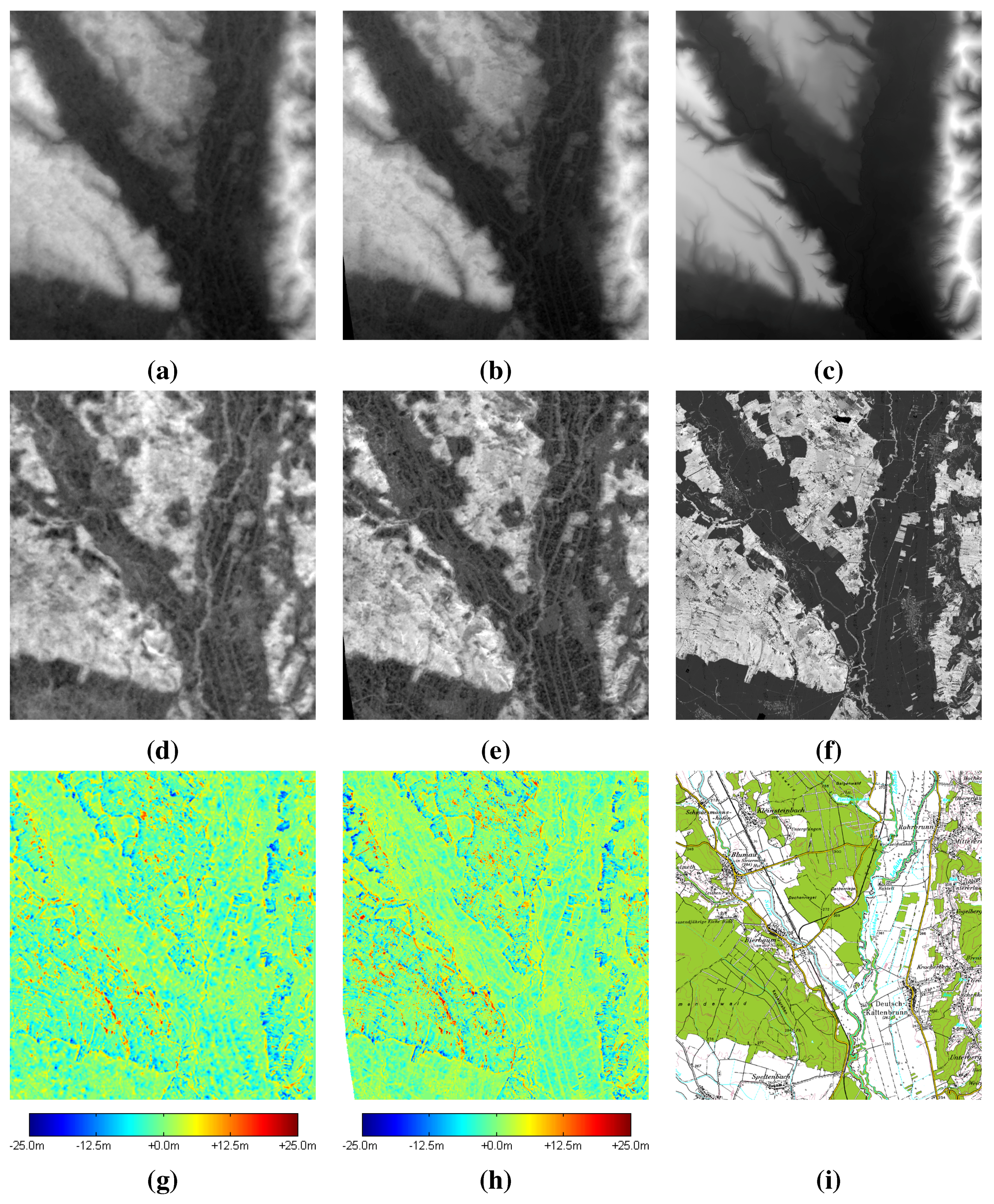
Figure 6. Shown are stereo-radargrammetric derived DSMs, CHMs and related height errors, together with LiDAR reference data and a topographic map for the test site “Burgau”. The height error maps reveal that regions of forest are reconstructed too low (bluish colors), while non-forest regions correspond to the LiDAR height information (green colors). In addition so-called border or edge effects are visible,
i.e., incorrect height estimates at 3D break lines, e.g., at forest boundaries. This effect is known and can be traced back to the SAR layover, foreshortening and shadow effects.
Figure 6.
Exemplary results of DSM and CHM extraction. The TerraSAR-X DSM (a), COSMO-SkyMed DSM (b), LiDAR reference DTM (c), TerraSAR-X CHM (d), COSMO-SkyMed CHM (e), LiDAR CHM (f), color coded TerraSAR-X height error (g), COSMO-SkyMed height error (h), and a topographic map for visual comparison (i). A subset of 7.1 × 7.6 km is shown.
Figure 6.
Exemplary results of DSM and CHM extraction. The TerraSAR-X DSM (a), COSMO-SkyMed DSM (b), LiDAR reference DTM (c), TerraSAR-X CHM (d), COSMO-SkyMed CHM (e), LiDAR CHM (f), color coded TerraSAR-X height error (g), COSMO-SkyMed height error (h), and a topographic map for visual comparison (i). A subset of 7.1 × 7.6 km is shown.
For the quantitative evaluation several DSMs are derived to enable a comparison and to show the benefit of the triplet-based approach.
Three DSM are extracted from pure stereo constellations. In particular, two images of a triplet form a stereo pair that is processed while ignoring the third image. These resulting DSMs are labeled
12,
23 and
13 (
cf. e.g.,
Table 6, first column), meaning that image 1 was matched to image 2, and the like.
Two additional DSMs are extracted using the complete triplet. Constellation 123 are gathered by combining match results of adjacent stereo pairs (i.e., 12 and 23), while 123-c includes the so-called cross-matching constellation 13.
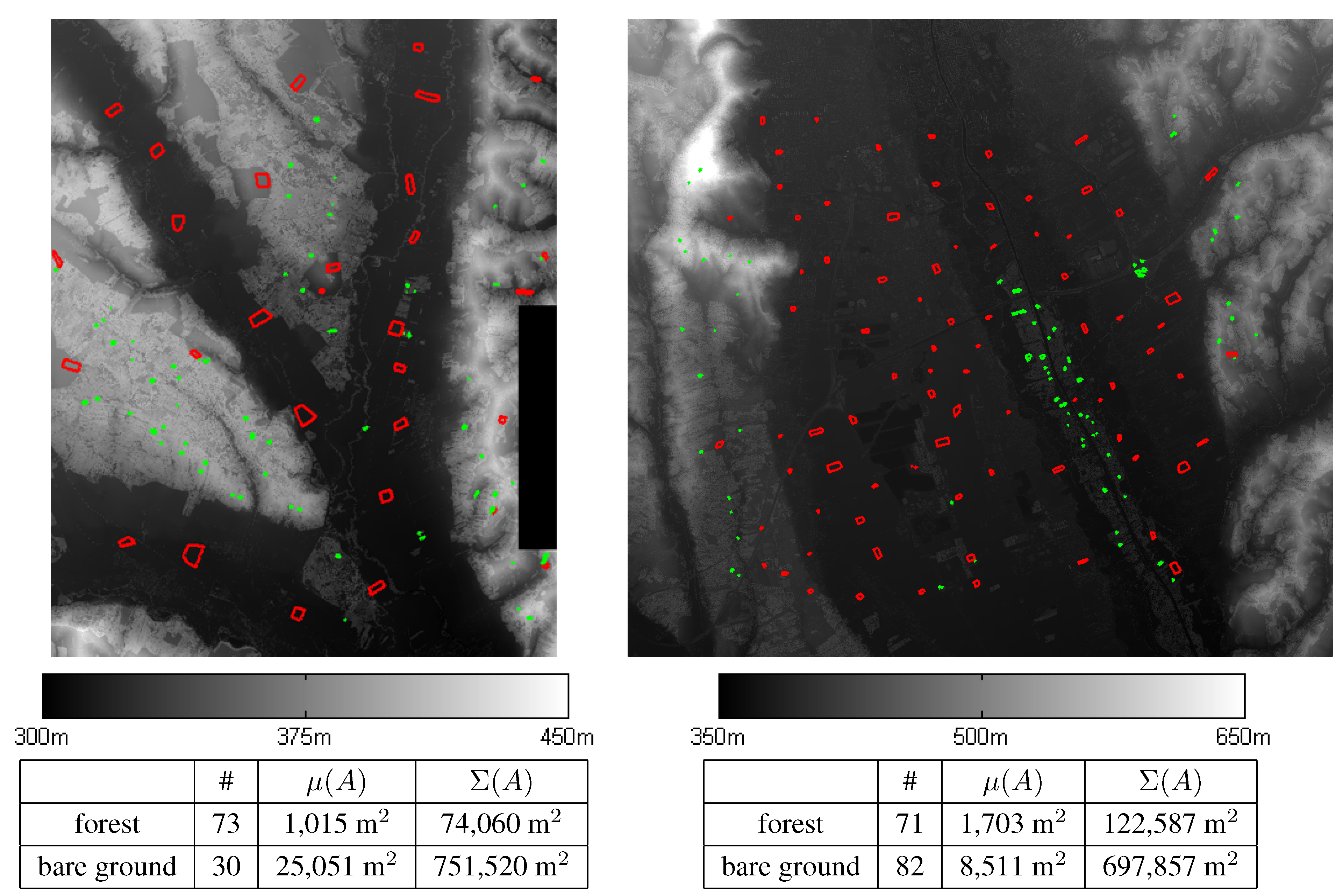
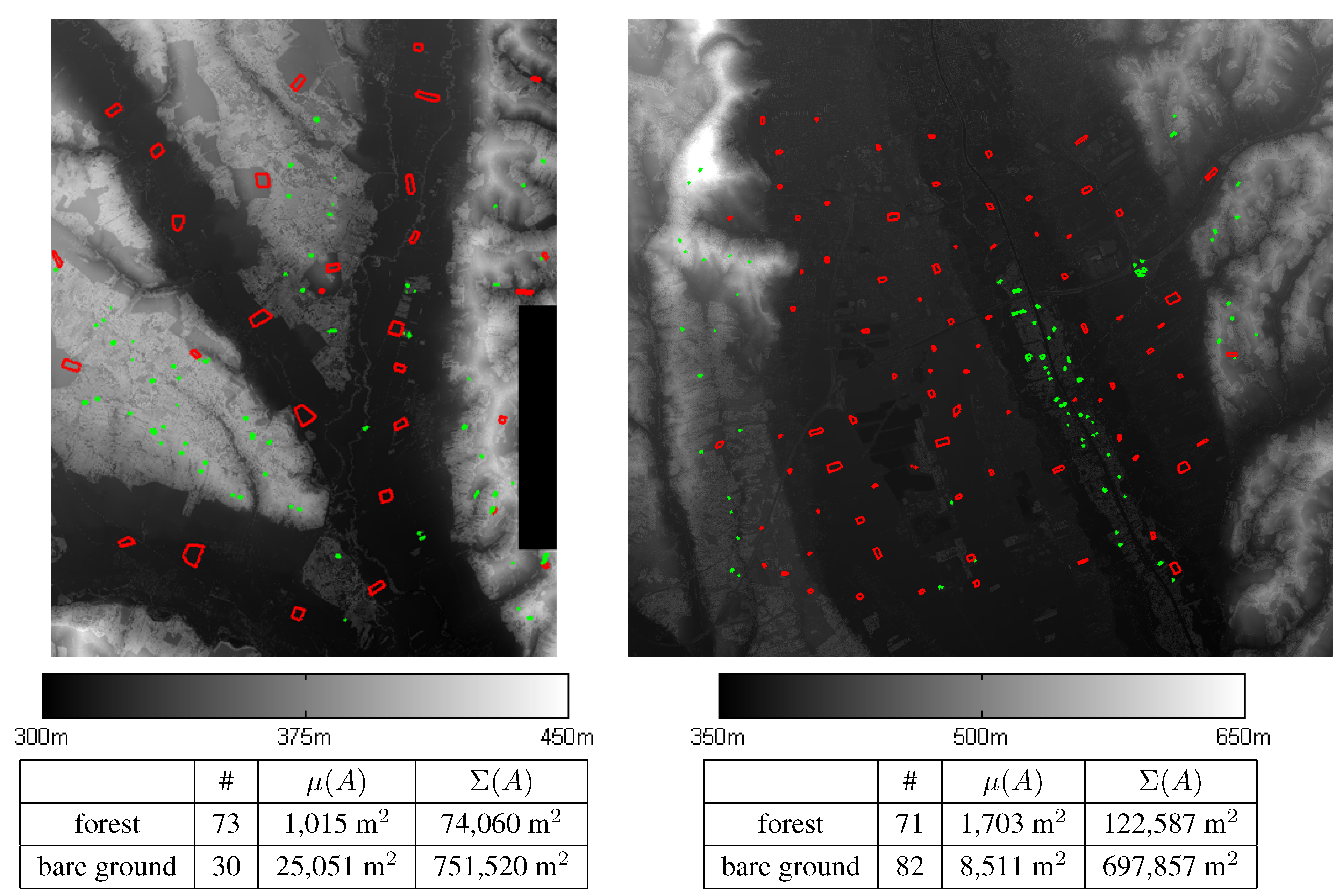
Therefore, in total five DSMs are calculated for each triplet. To evaluate their accuracies 30 regions of bare ground and 73 forested areas were manually selected for test site “Burgau” (82 and 71 for “Seiersberg”), spatially equally distributed over the scenes (
cf. Figure 5). These regions are compared to the reference LiDAR DSM and the quality is described by the average height error
μ in meters and the average standard deviation height error
σ in meters. For the regions of interest over forest also the average canopy height underestimation
τ is extracted and given in percent.
Test Site Burgau. Table 6 and
Table 7 reveal that the intersection angle (the starting look angle
θ plus the intersection angle in degrees is given in these Tables) is indirect proportional to the resulting DSM quality (
i.e., small intersection angles results in large errors, seen in the large standard deviation values of the stereo constellations
23). Therefore, the pure stereo constellation
13 yield best results (
cf. [
18]). When analyzing the triplets, it can be seen that the triplet using cross-matching performs better. Overall, the best results on bare ground have a mean value below 20 cm for TerraSAR-X and 50cm for COSMO-SkyMed with a standard deviation of 2 meters. However, when moving into regions of forest a systematic canopy height underestimation is visible (like predicted from previous studies on InSAR processing over forest [
21,
22,
23,
24,
25,
28]).
Table 6 and
Table 7 reveal that the standard deviation of height error drops a bit in regions of forest, while the mean height errors show systematic bias. This aspect should be investigated in future. Again the stereo configuration with the smallest intersection angle behaves differently than all others which yield an underestimation in the range of 25 to 35% for TerraSAR-X. For COSMO-SkyMed the underestimation is in the range of 20% where no direct correlation of the intersection angle and the canopy height can be observed.
Table 6.
Detailed 3D height analysis for test site Burgau—TerraSAR-X Spotlight products.
Table 6.
Detailed 3D height analysis for test site Burgau—TerraSAR-X Spotlight products.
| | Ascending | Descending |
| | | Bare Ground | Forest | | Bare Ground | Forest |
| | θ [] | μ [m] | σ [m] | μ [m] | σ [m] | τ [%] | θ [] | μ [m] | σ [m] | μ [m] | σ [m] | τ [%] |
| 12 | 22.3 + 14.9 | –0.10 | 2.46 | –5.89 | 2.01 | 29.2 | 21.3 + 15.2 | 0.27 | 2.22 | –5.26 | 2.00 | 26.4 |
| 23 | 37.2 + 11.3 | 0.25 | 5.27 | –2.47 | 2.44 | 11.0 | 36.5 + 11.5 | 0.85 | 4.64 | –2.10 | 2.27 | 8.58 |
| 13 | 22.3 + 26.2 | 0.14 | 1.98 | –6.77 | 1.94 | 33.7 | 21.3 + 26.7 | –0.06 | 1.95 | –6.52 | 1.90 | 32.3 |
| 123 | 22.3 + 26.2 | –0.00 | 2.86 | –4.89 | 1.96 | 23.8 | 21.3 + 26.7 | 0.43 | 2.48 | –4.36 | 1.93 | 21.3 |
| 123-c | 22.3 + 26.2 | 0.07 | 2.04 | –5.81 | 1.87 | 28.5 | 21.3 + 26.7 | 0.18 | 1.90 | –5.45 | 1.83 | 26.4 |
Table 7.
Detailed 3D height analysis for test site Burgau - COSMO-SkyMed Spotlight products.
Table 7.
Detailed 3D height analysis for test site Burgau - COSMO-SkyMed Spotlight products.
| | Ascending |
| | | Bare Ground | Forest |
| | θ [] | μ [m] | σ [m] | μ [m] | σ [m] | τ [%] |
| 12 | 27.1 + 8.8 | 0.22 | 3.12 | –2.33 | 2.37 | 12.5 |
| 23 | 35.9 + 13.5 | 0.97 | 3.65 | –0.98 | 2.14 | 5.22 |
| 13 | 27.1 + 22.3 | 0.18 | 2.33 | –5.18 | 2.09 | 27.7 |
| 123 | 27.1 + 22.3 | 0.52 | 2.87 | –1.64 | 2.12 | 8.75 |
| 123-c | 27.1 + 22.3 | 0.46 | 2.21 | –3.66 | 2.02 | 19.6 |
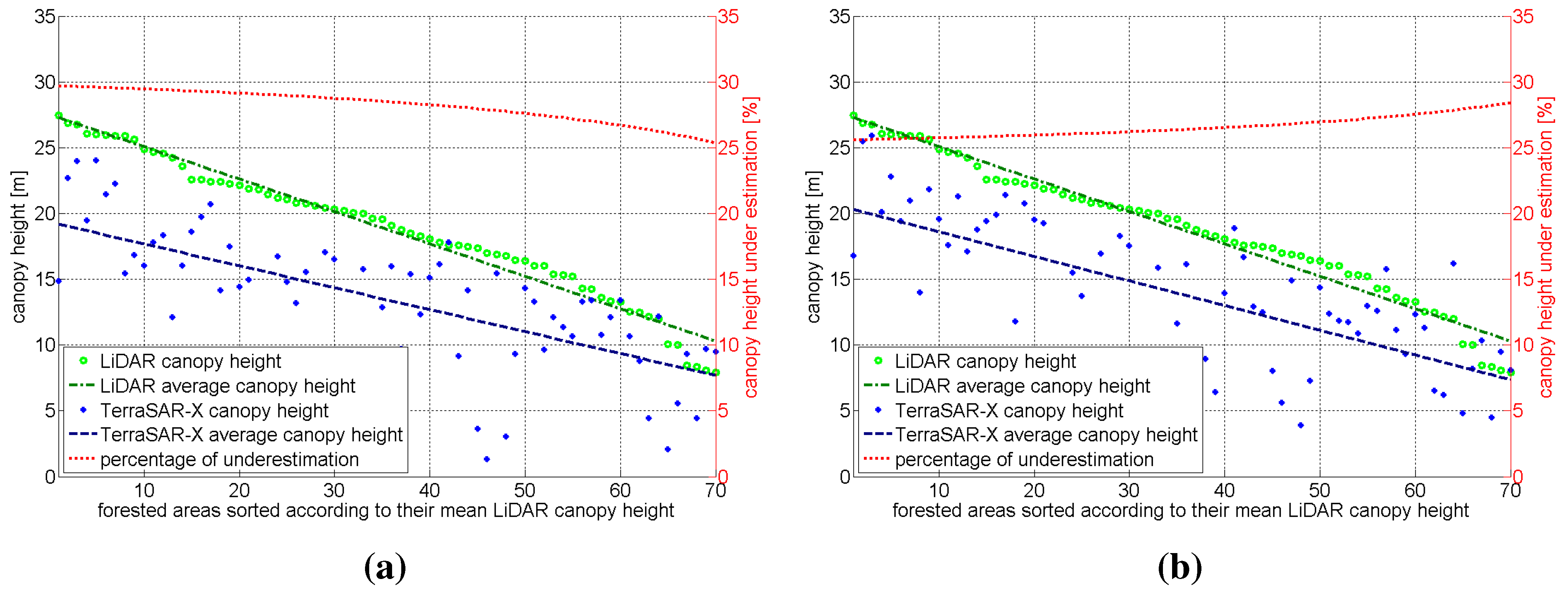
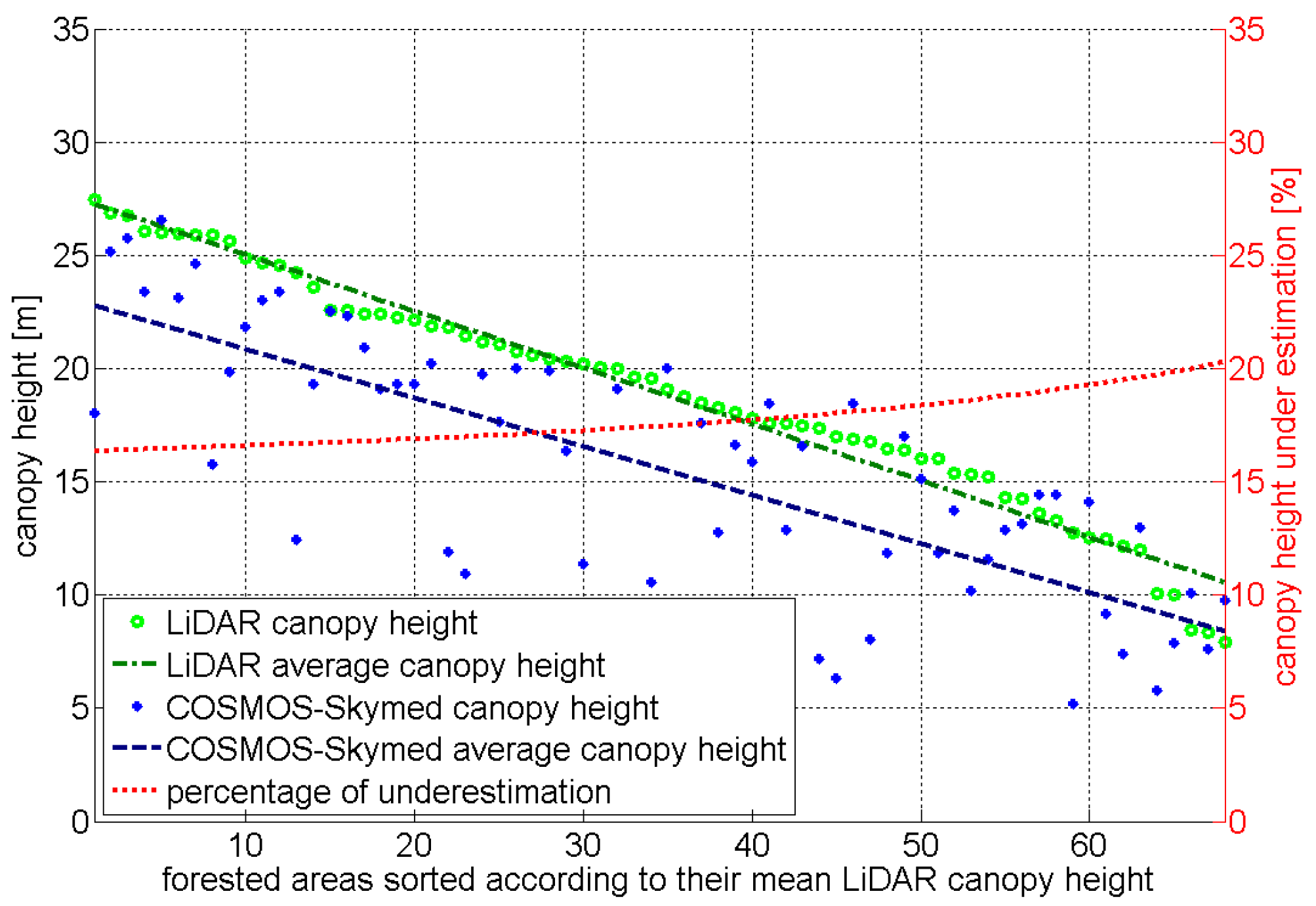
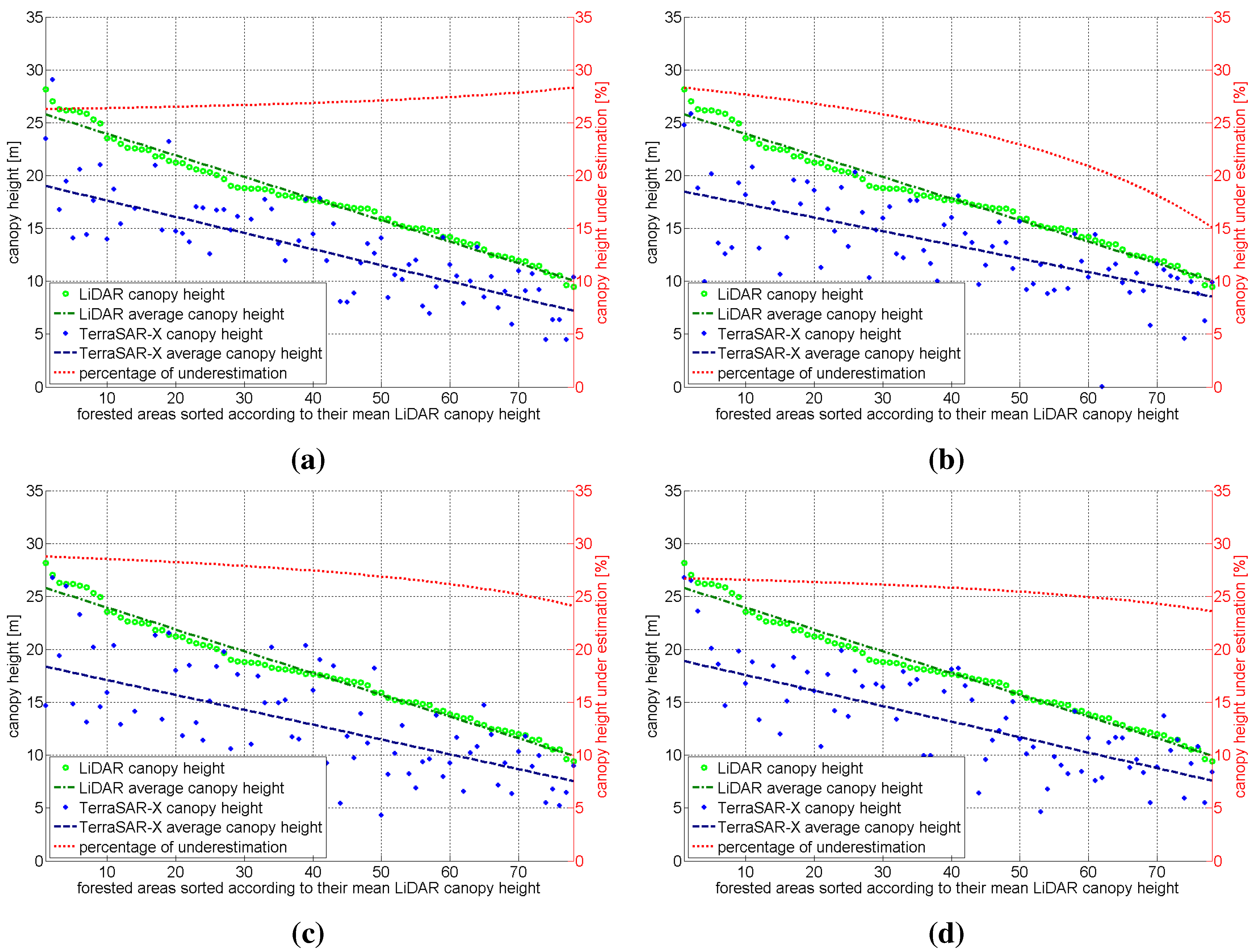
For triplets using cross-matching for ascending and descending orbits a detailed analysis of canopy underestimation and canopy height is given in
Figure 7 and
Figure 8. Those Figures show the average canopy height of each forested area in decreasing order according to the mean LiDAR canopy height data of the AOIs. In addition the canopy height underestimation is given in percent.
Figure 7.
Burgau TerraSAR-X Spotlight asc123-c (a) and dsc123-c (b): Canopy height underestimation.
Figure 7.
Burgau TerraSAR-X Spotlight asc123-c (a) and dsc123-c (b): Canopy height underestimation.
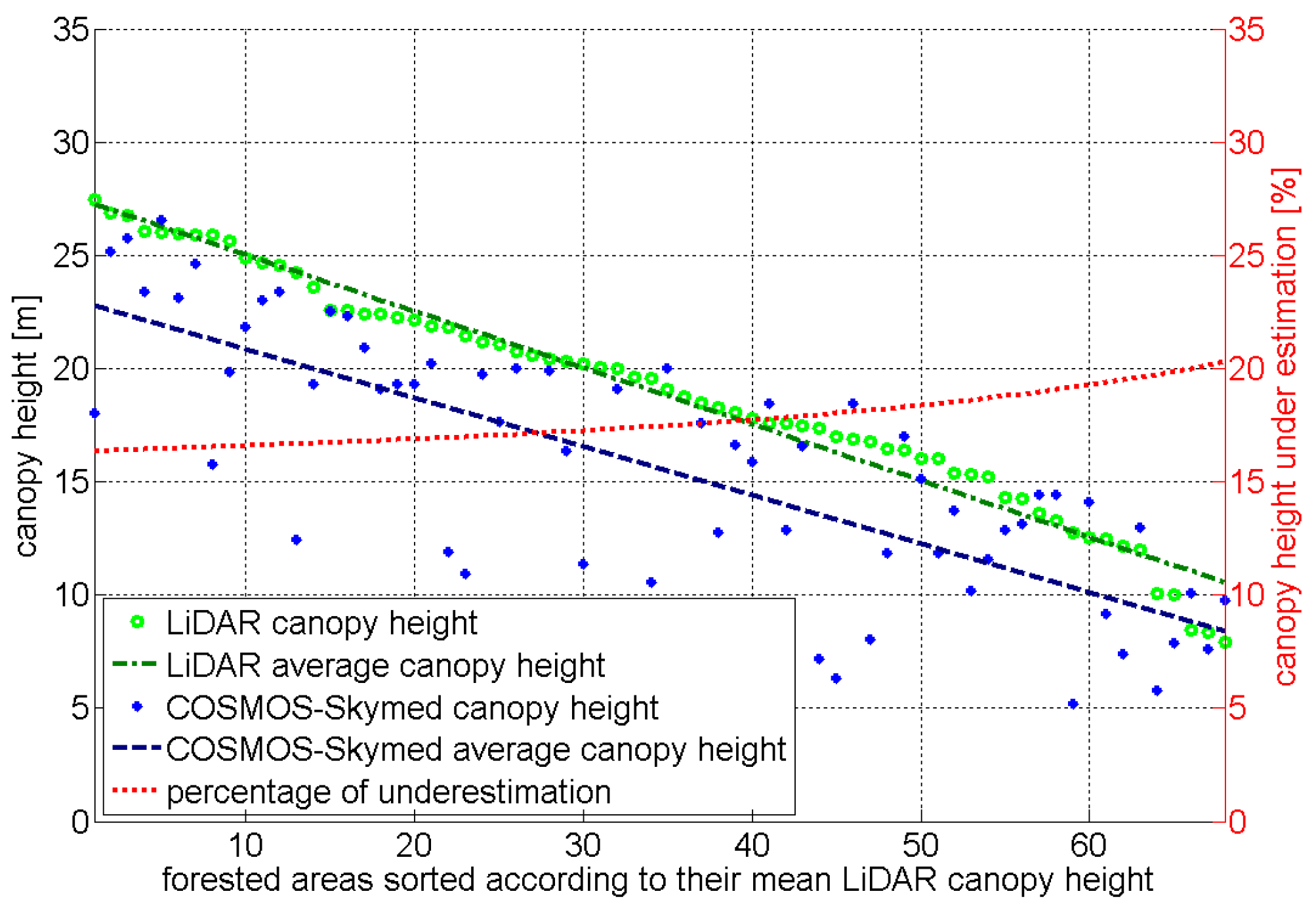
Figure 8.
Burgau COSMO-SkyMed Spotlight asc123-c: Canopy height underestimation.
Figure 8.
Burgau COSMO-SkyMed Spotlight asc123-c: Canopy height underestimation.
For TerraSAR-X data from ascending orbit COSMO-SkyMed the underestimation is between 25 and 30% and increases with canopy height (
cf. Figure 7(a)) whereas in the TerraSAR-X descending case the underestimation decreases with canopy height. Since this variation is within 5% of the tree height it may yield from inaccurate image matching. This aspect should be investigated in future research.
The basic trend of underestimation is more or less similar for imagery from the different orbits (as expected). Beside this main trend the scattering of the individual measurements shows a lot of noise. For the underestimation is between 16 and 20% and is slightly decreasing with canopy height.
Test Site Seiersberg. The results on Spotlight imagery for this test site are similar to the previous test site.
Table 8 again shows that the small intersection angles of the constellations
23 yield poor results with large standard deviation height errors. The best triplet configuration result in average accuracy of 20 cm with standard deviations of about 2 meters on bare ground. In regions of forest again the canopy height is underestimated. The underestimation
τ is in the range of 20% to 30%, constellations
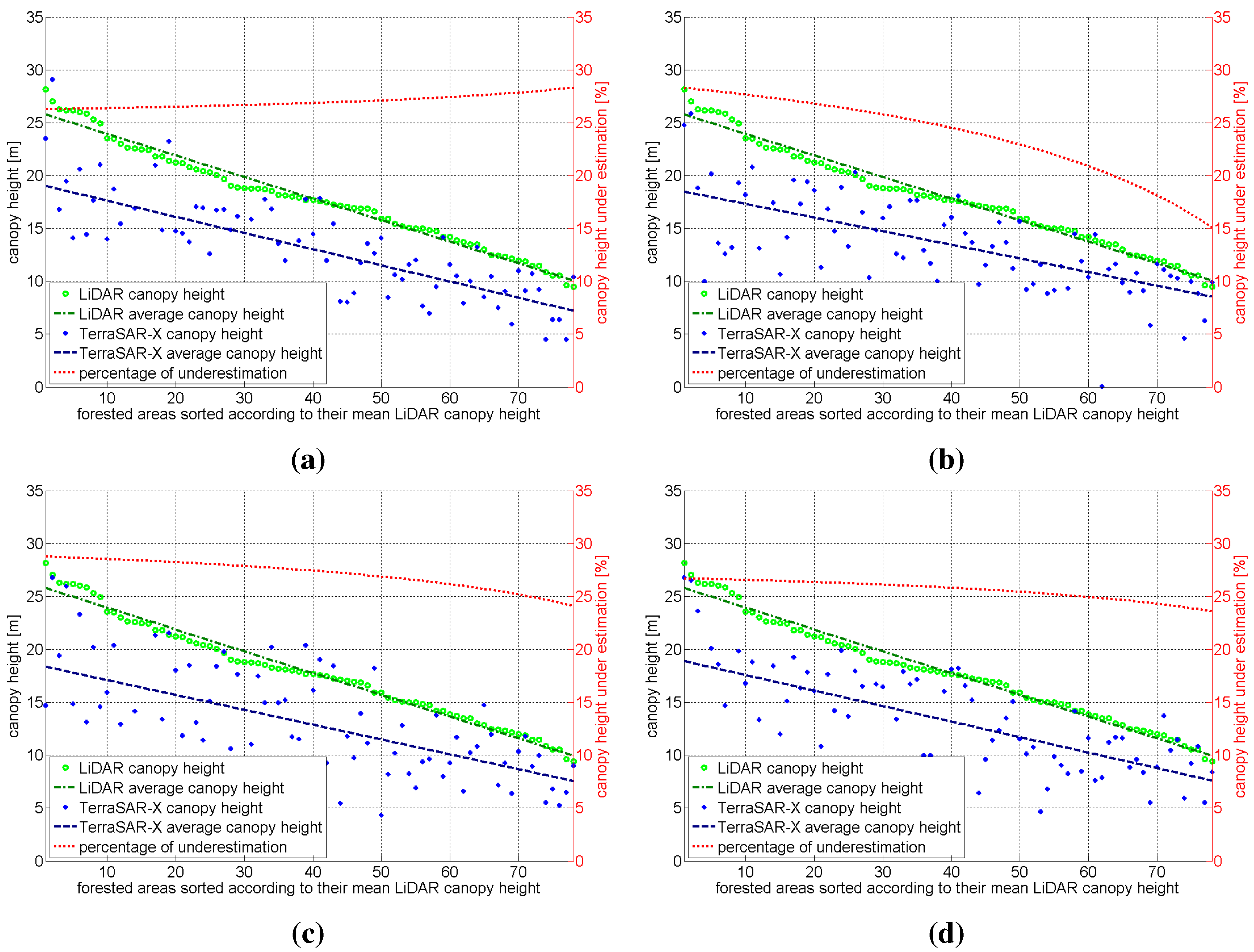
23 behaving differently. Detailed plots on canopy height and their underestimation are shown in
Figure 9. The canopy height underestimation drops to 15% for small trees for Spotlight dsc123-c constellation (
Figure 9(b)). Again, it is assumed that such outliers come from inaccurate image matching. This aspect should be treated in future research.
Table 8.
Detailed 3D height analysis for test site Seiersberg—TerraSAR-X Spotlight and Stripmap products.
Table 8.
Detailed 3D height analysis for test site Seiersberg—TerraSAR-X Spotlight and Stripmap products.
| Spotlight |
| | Ascending | Descending |
| | | Bare Ground | Forest | | Bare Ground | Forest |
| | θ [] | μ [m] | σ [m] | μ [m] | σ [m] | τ [%] | θ [] | μ [m] | σ [m] | μ [m] | σ [m] | τ [%] |
| 12 | 32.9 + 12.4 | 0.18 | 3.43 | –6.82 | 3.26 | 33.0 | 26.2 + 14.1 | 0.27 | 2.30 | –3.92 | 3.02 | 20.9 |
| 23 | 45.3 + 9.3 | –1.35 | 6.18 | –2.06 | 3.37 | 11.8 | 40.3 + 10.5 | 0.24 | 4.14 | –2.45 | 3.17 | 12.3 |
| 13 | 32.9 + 21.7 | 0.64 | 2.36 | –5.59 | 3.17 | 31.3 | 26.2 + 24.6 | 0.34 | 1.70 | –5.56 | 2.98 | 31.0 |
| 123 | 32.9 + 21.7 | –0.52 | 3.68 | –5.05 | 3.09 | 23.0 | 26.2 + 24.6 | 0.17 | 2.37 | –3.34 | 2.94 | 18.3 |
| 123-c | 32.9 + 21.7 | 0.20 | 2.56 | –5.02 | 3.14 | 26.9 | 26.2 + 24.6 | 0.23 | 1.70 | –4.46 | 2.87 | 24.6 |
| Stripmap |
| | Ascending | Descending |
| | | Bare Ground | Forest | | Bare Ground | Forest |
| | θ [] | μ [m] | σ [m] | μ [m] | σ [m] | τ [%] | θ [] | μ [m] | σ [m] | μ [m] | σ [m] | τ [%] |
| 12 | 33.2 + 11.2 | 1.08 | 3.08 | –6.86 | 3.05 | 40.0 | 26.4 + 14.7 | 1.66 | 2.14 | –4.18 | 3.02 | 25.4 |
| 23 | 44.4 + 10.6 | 3.96 | 5.87 | 0.26 | 3.67 | 1.79 | 41.1 + 9.3 | 2.73 | 5.22 | –3.13 | 3.31 | 17.7 |
| 13 | 33.2 + 21.8 | 1.32 | 2.34 | –5.34 | 2.97 | 28.4 | 26.4 + 24.0 | 1.28 | 1.69 | –5.15 | 2.90 | 28.7 |
| 123 | 33.2 + 21.8 | 2.12 | 3.33 | –4.67 | 3.11 | 27.2 | 26.4 + 24.0 | 2.12 | 2.57 | –3.65 | 2.96 | 22.3 |
| 123-c | 33.2 + 21.8 | 1.56 | 2.60 | –4.94 | 2.96 | 27.5 | 26.4 + 24.0 | 1.66 | 1.75 | –4.53 | 2.86 | 25.8 |
The accuracy of DSMs resulting from Stripmap images are in general lower,
i.e., less details are visible, in comparison to Spotlight data (
cf. [
14,
16]), with canopy height underestimation in the range of 25% to 40%. Since, this study is based upon an evaluation on homogeneous areas of interest this aspect is not reflected directly in the quantitative results given in
Table 8. However, it can be seen that regions on bare ground are reconstructed with 1.5 m bias in height, while the standard deviation of areas on bare ground and on forest is quite similar to the ones resulting from Spotlight data. Further investigations are planned over tropical forest, where obviously Stripmap data are the preferred acquisition mode due to the larger swath width and the continuous along track coverage.
Figure 9.
Seiersberg TerraSAR-X Spotlight asc123-c (a) and dsc123-c (b) and TerraSAR-X Stripmap asc123-c (c) and dsc123-c (d): Canopy height underestimation.
Figure 9.
Seiersberg TerraSAR-X Spotlight asc123-c (a) and dsc123-c (b) and TerraSAR-X Stripmap asc123-c (c) and dsc123-c (d): Canopy height underestimation.
Overall. The derivation of the canopy height shows significant underestimation in the range of 20% to 35% in our study and on average 26.6% ± 1.4% (TerraSAR-X) and
(COSMO-SkyMed) for the triplets using cross-matching. As this aspect is a result of an intrinsic physical property of radar sensing in X-band, a similar height bias in surface models over forest is to be expected also from TanDEM-X [
40] and COSMO-SkyMed in tandem mode [
13]. The significant differences of the underestimation are most likely traced back to different acquisition conditions as the images are gathered with 13 months time lag. For a direct comparison image triplets of both sensors, TerraSAR-X and COSMO-SkyMed , should be acquired throughout a small and common time frame.
In the presented case the canopy height underestimation can be corrected by applying the factor . After that the maximal height error over forest is reduced to 0.5 m for the triplet cases. Nevertheless, as the amount of height underestimation over forest depends on a manifold of a-priori unknown factors, deriving a highly accurate canopy height model using very high resolution SAR imagery is and remains very challenging. Additional experiments over different types of forest (deciduous and coniferous) will show if a pre-segmented forest classification is sufficient to undo the underestimation bias on a large scale.
4.2. Forest Segmentation
The segmentation is evaluated at one test site as only one InSAR pair was available for this study. It is assumed that other InSAR pairs from or would yield similar results, as the coherence over forest is always low using these sensors in repeat pass mode. For training the maximum likelihood classifier the AOIs in
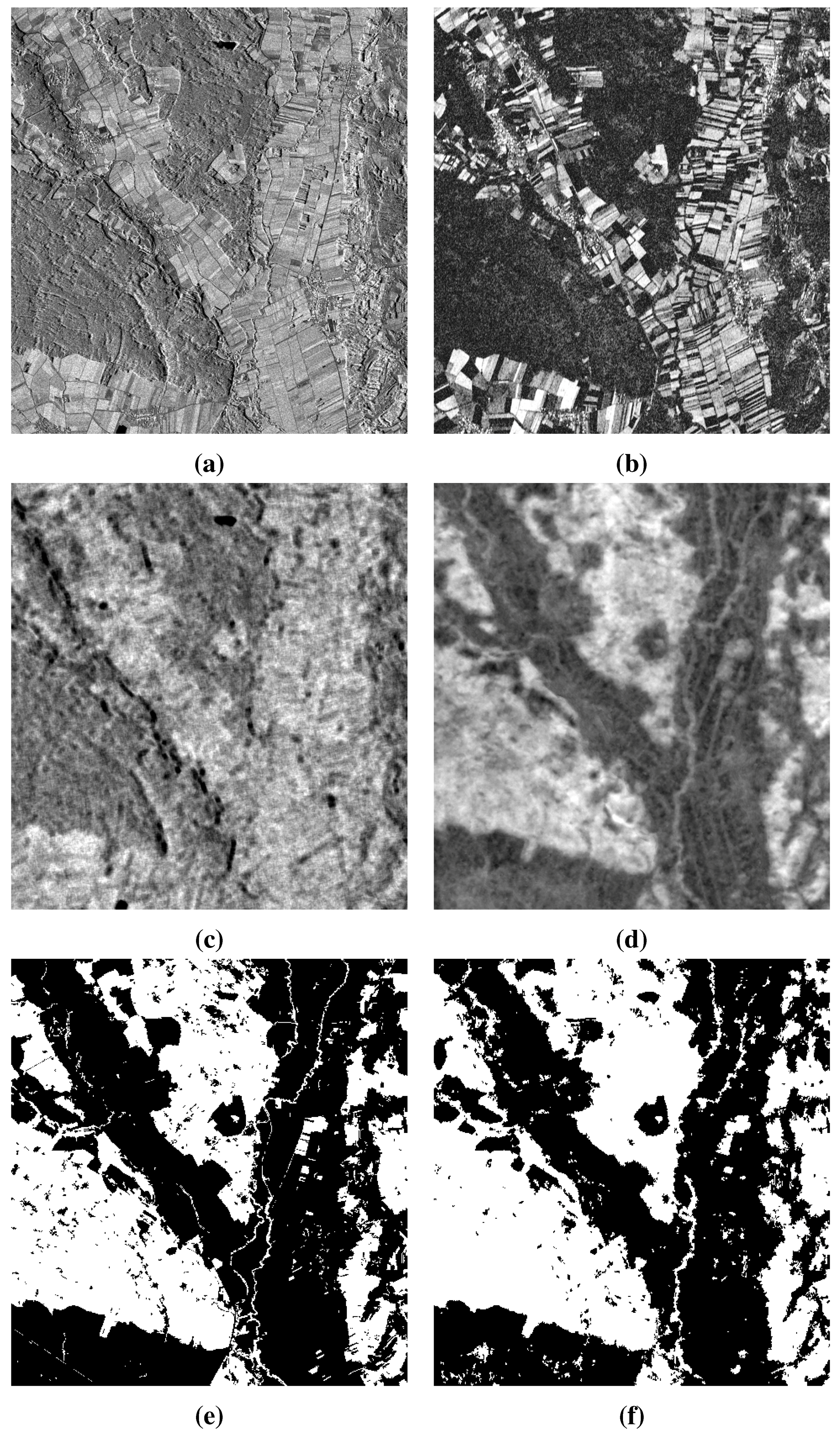
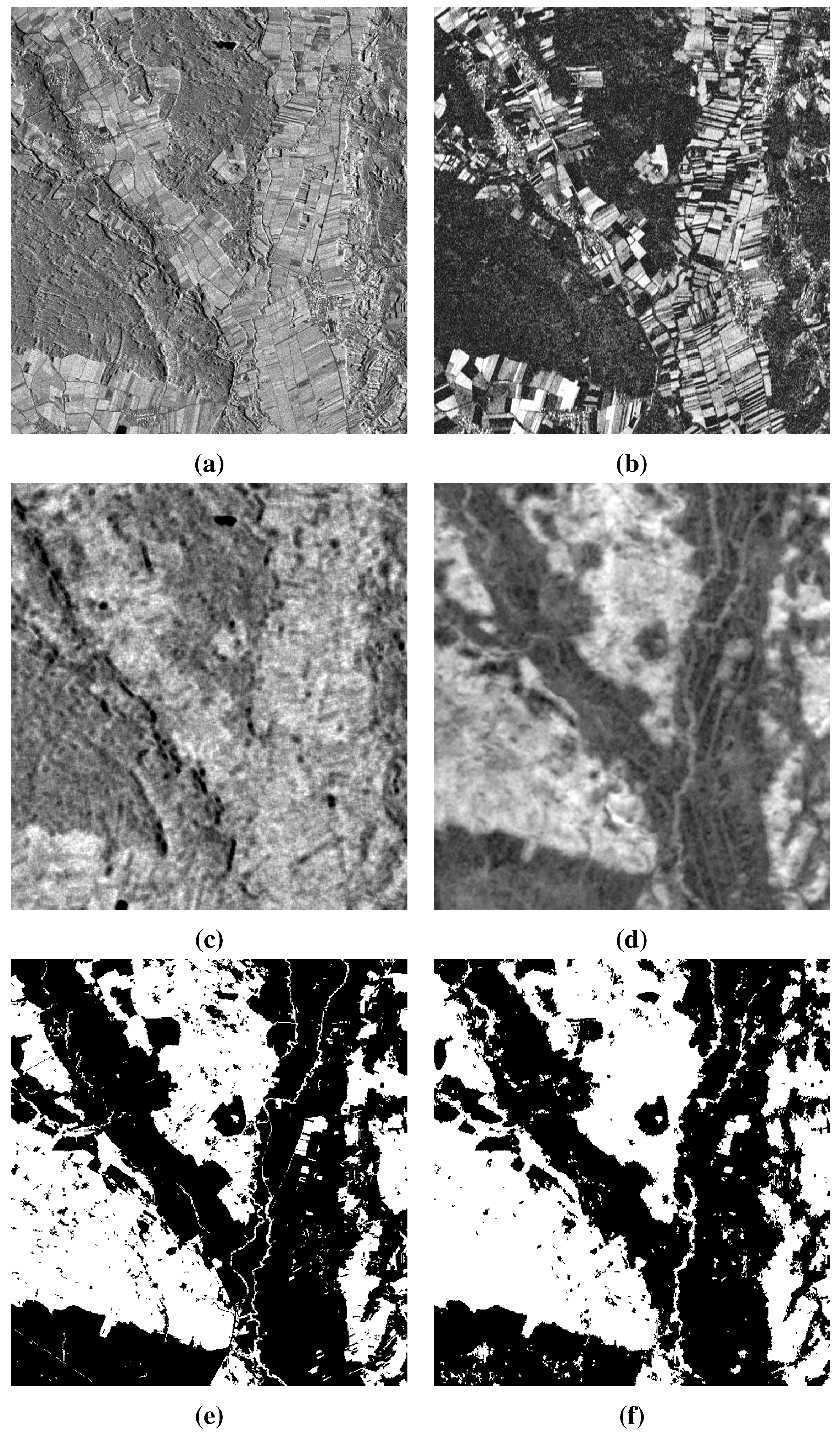
Figure 5 are taken as input data. In the testing phase the forest segmentation is evaluated on the whole region “Burgau” at a GSD of 5 m, in contrast to the DSM evaluation which is based on AOIs. The features used for forest segmentation are shown in
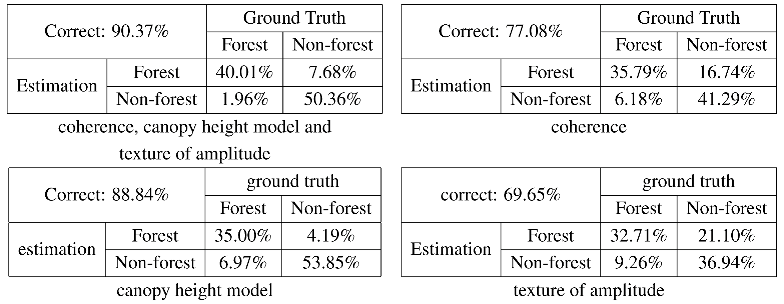
Figure 10. Obviously, the most important information for the segmentation are the canopy height model and the InSAR coherence. This aspect can be verified in the confusion matrices given in
Table 9, where the best result is shown (coherence, canopy height model and texture of amplitude), plus the individual results using only one of the proposed modalities.
The confusion matrix in
Table 9 reveals that 90% of all pixels (here one pixel has a GSD of 5 meters) are correctly classified with respect to the LiDAR reference. About 8% of non-forest regions are classified incorrectly as forest. This especially happens in small forest clearances which are not seen due to the slant range SAR geometry. The 2% of pixels classified wrongly as non-forest are mainly small forest stands where image matching is unsuccessful and thus such regions get interpolated.
A direct comparison to the classification results in [
31] is explicitly avoided since different test sites are used and the evaluation strategies are not comparable. However, as can be seen in the confusion matrices in
Table 9 it is obvious that the novel image modalities, namely the canopy height model and InSAR coherence, improves the segmentation results. It is to be expected, that such information would also increase the robustness and accuracy of the land cover extraction algorithm in [
31].
Table 9.
Confusion matrix of forest segmentation given for different feature combinations. The joint usage of all features yields best results.
Table 9.
Confusion matrix of forest segmentation given for different feature combinations. The joint usage of all features yields best results.
![Remotesensing 03 00792 i001]() |
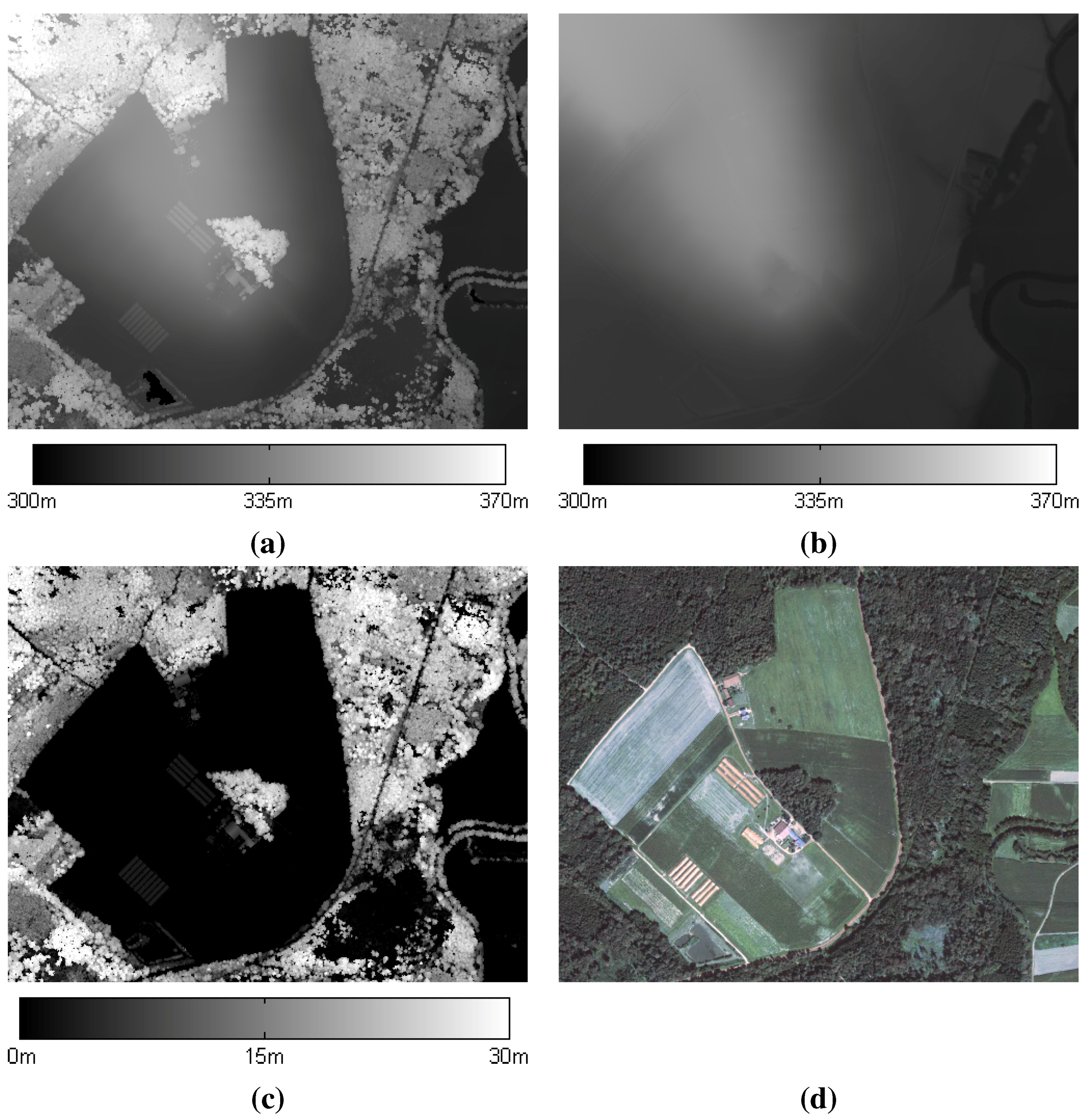
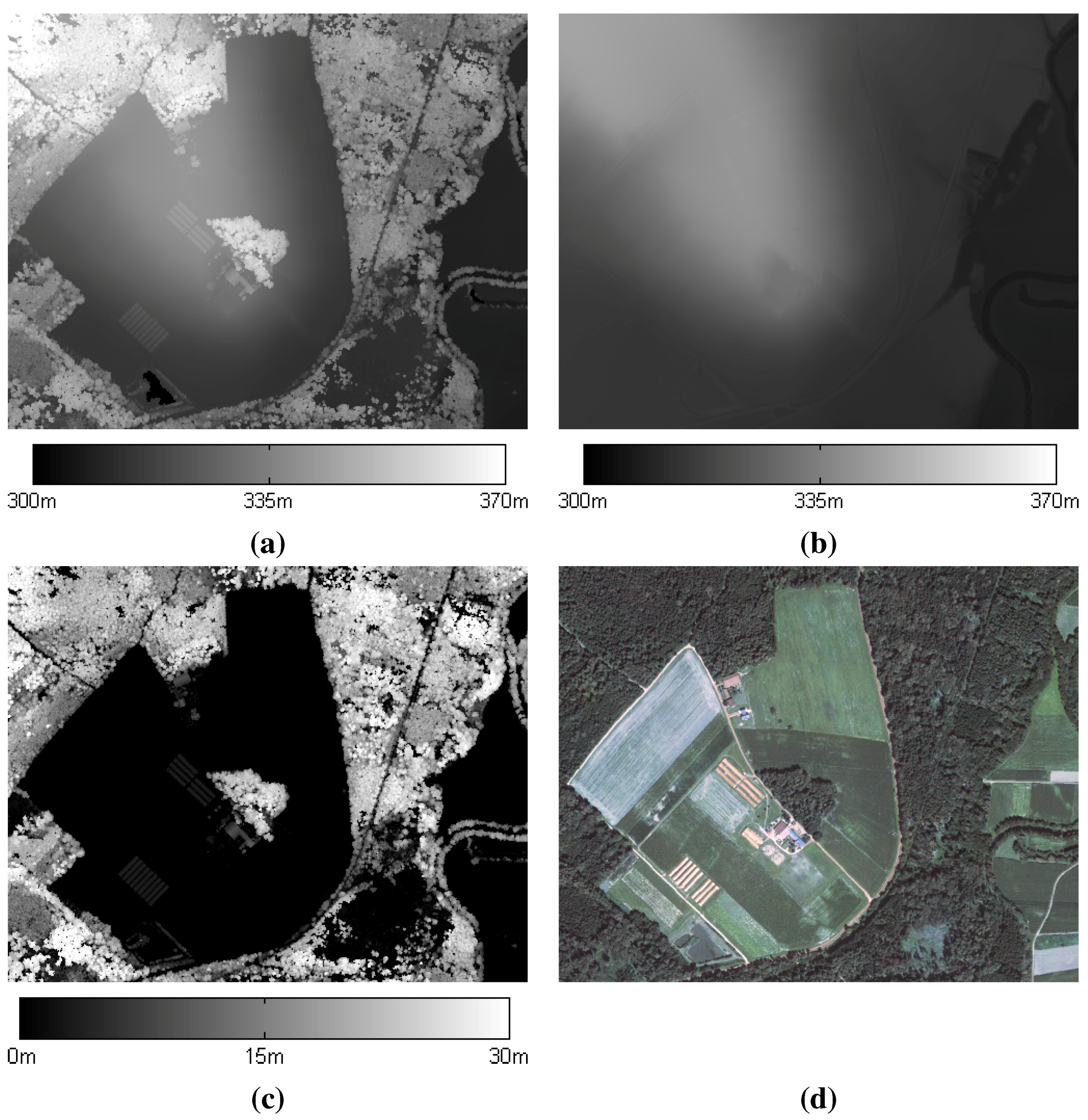
Figure 10.
Exemplary input data used for image segmentation (a) backscatter, (b) coherence, (c) texture and (d) canopy height model, reference segmentation based on laser scanner vegetation height model (e) and TerraSAR-X based segmentation (f).
Figure 10.
Exemplary input data used for image segmentation (a) backscatter, (b) coherence, (c) texture and (d) canopy height model, reference segmentation based on laser scanner vegetation height model (e) and TerraSAR-X based segmentation (f).
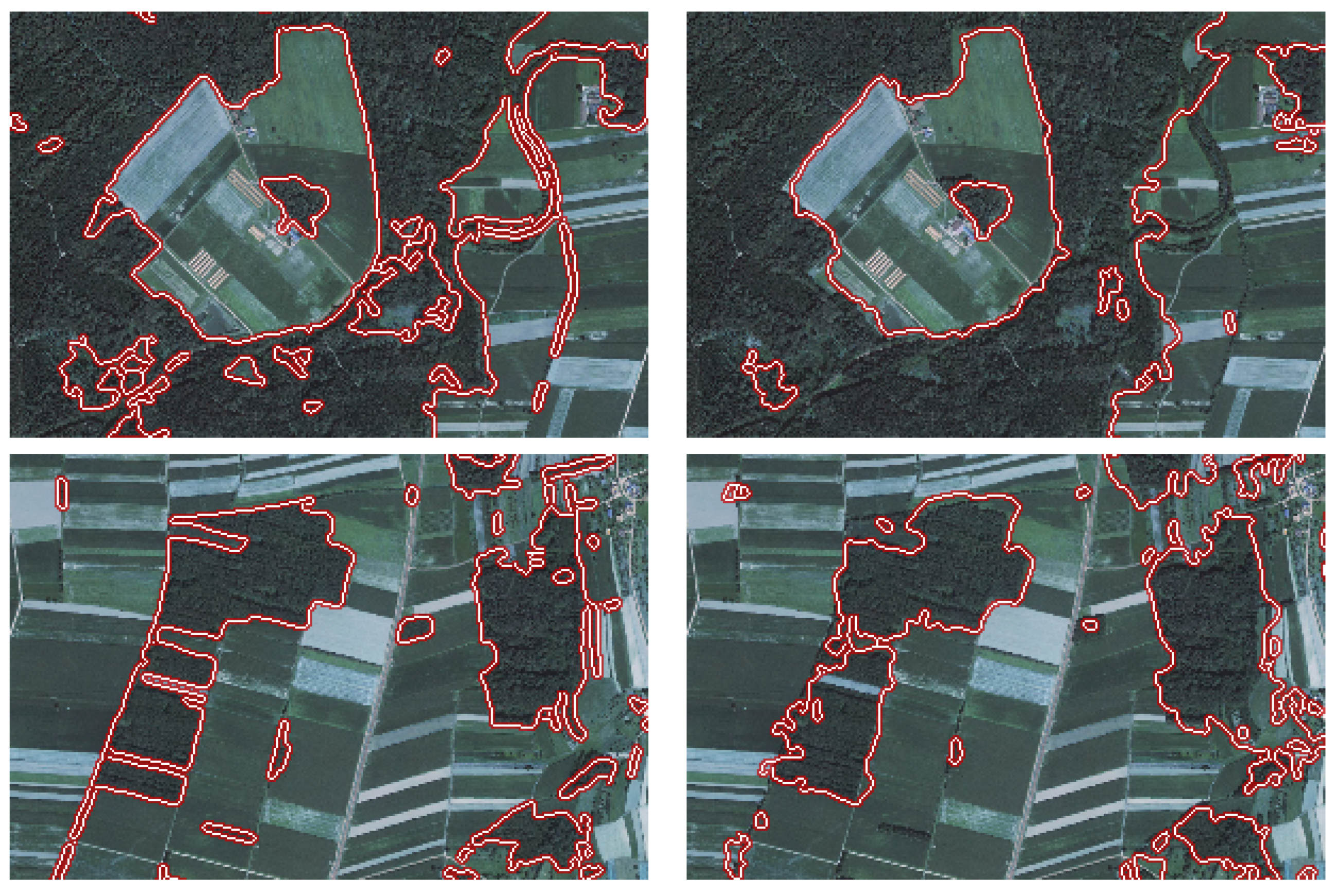
Forest Border Lines. Finally, forest border lines can directly be extracted from the segmentation result via edge detection.
Figure 11 shows some examples. Overall, the quality of extracted forest border lines is higher for huge dense forests than for small isolated stands (this aspect was also observed in [
31]), where small stands are often not detected at all. Nevertheless, forest border lines are in general very well extracted and their accuracy is directly dependent on the forest segmentation.
Figure 11.
Detailed views on forest border line extraction for two subsets. On the left reference border lines are given and on the right the automatically extracted borders using TerraSAR-X alone.
Figure 11.
Detailed views on forest border line extraction for two subsets. On the left reference border lines are given and on the right the automatically extracted borders using TerraSAR-X alone.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}