
LiDAR-Based Road Cracking Detection: Machine Learning Comparison, Intensity Normalization, and Open-Source WebGIS for Infrastructure Maintenance




Abstract
1. Introduction
2. Materials and Methods
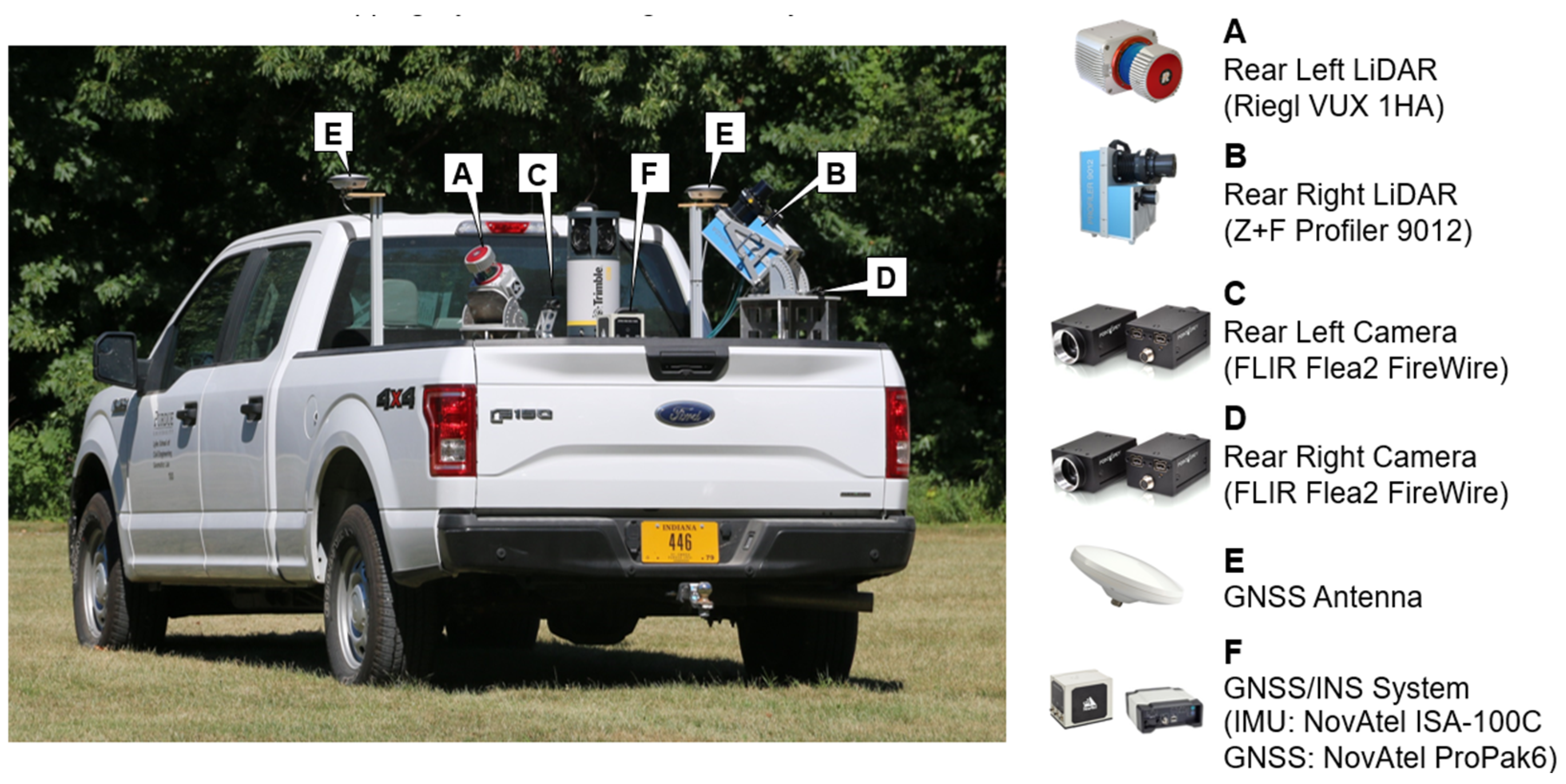
2.1. Data Acquisition Systems
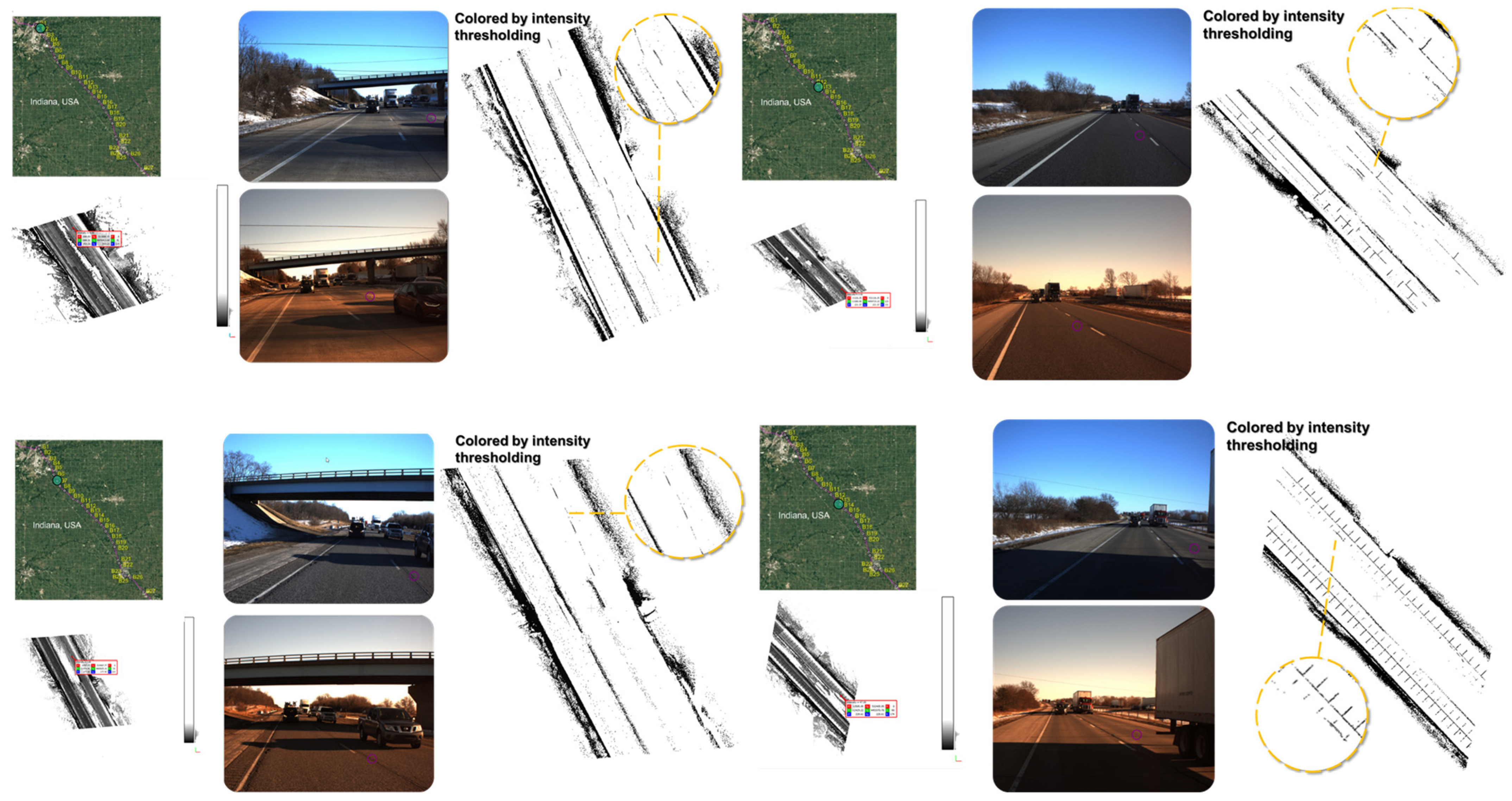
2.2. Study Areas
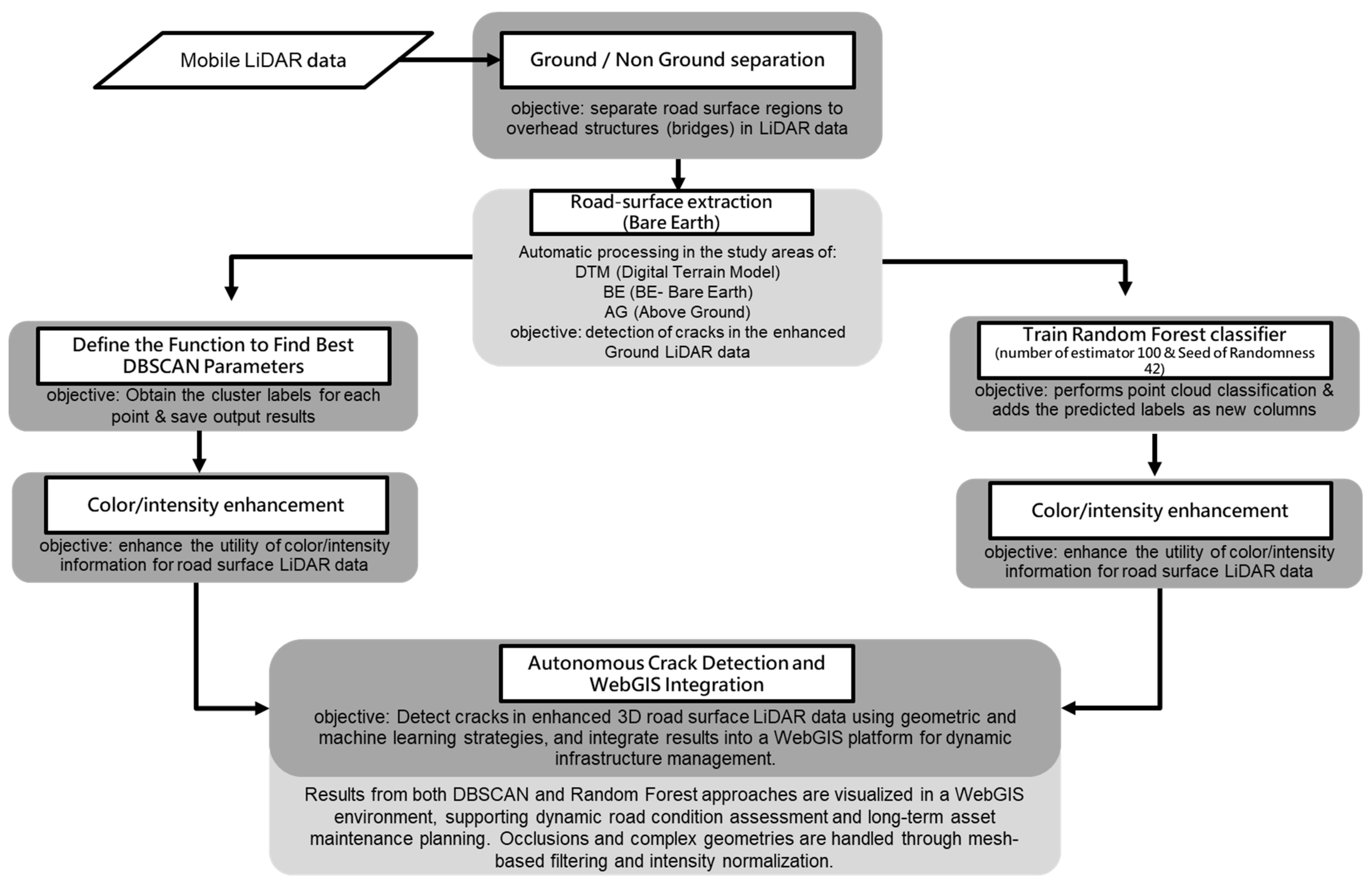
2.3. Proposed Methodology
3. Results
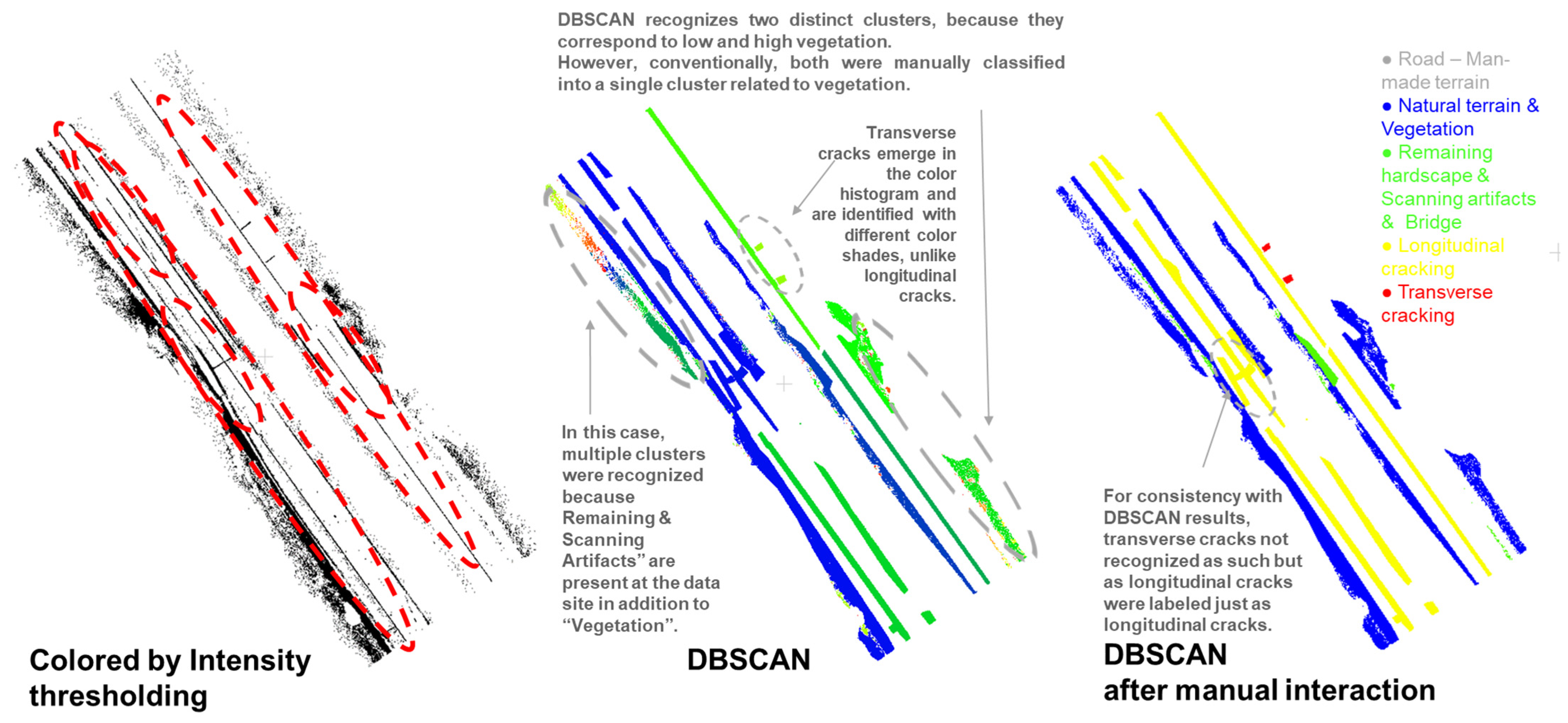
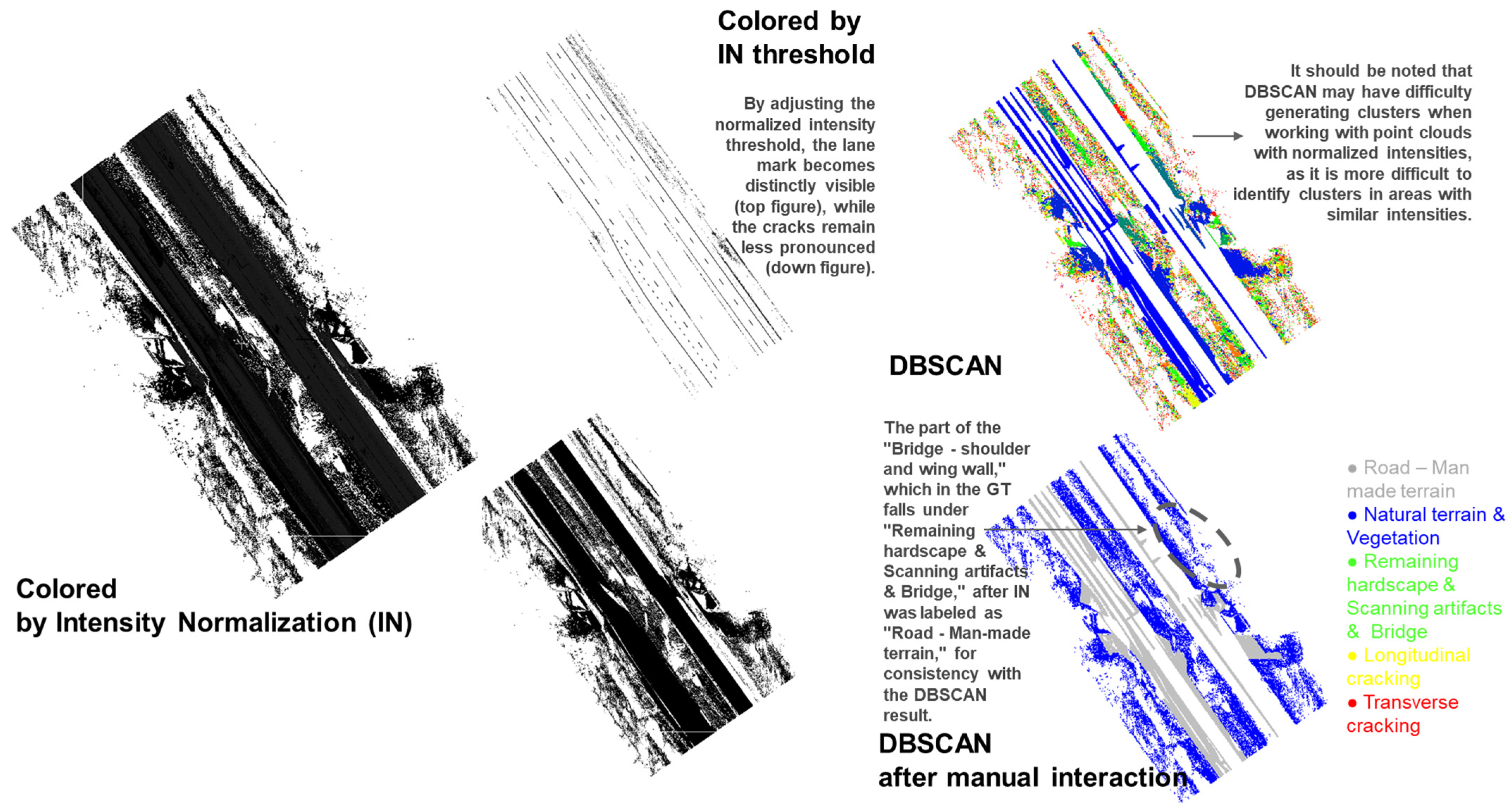
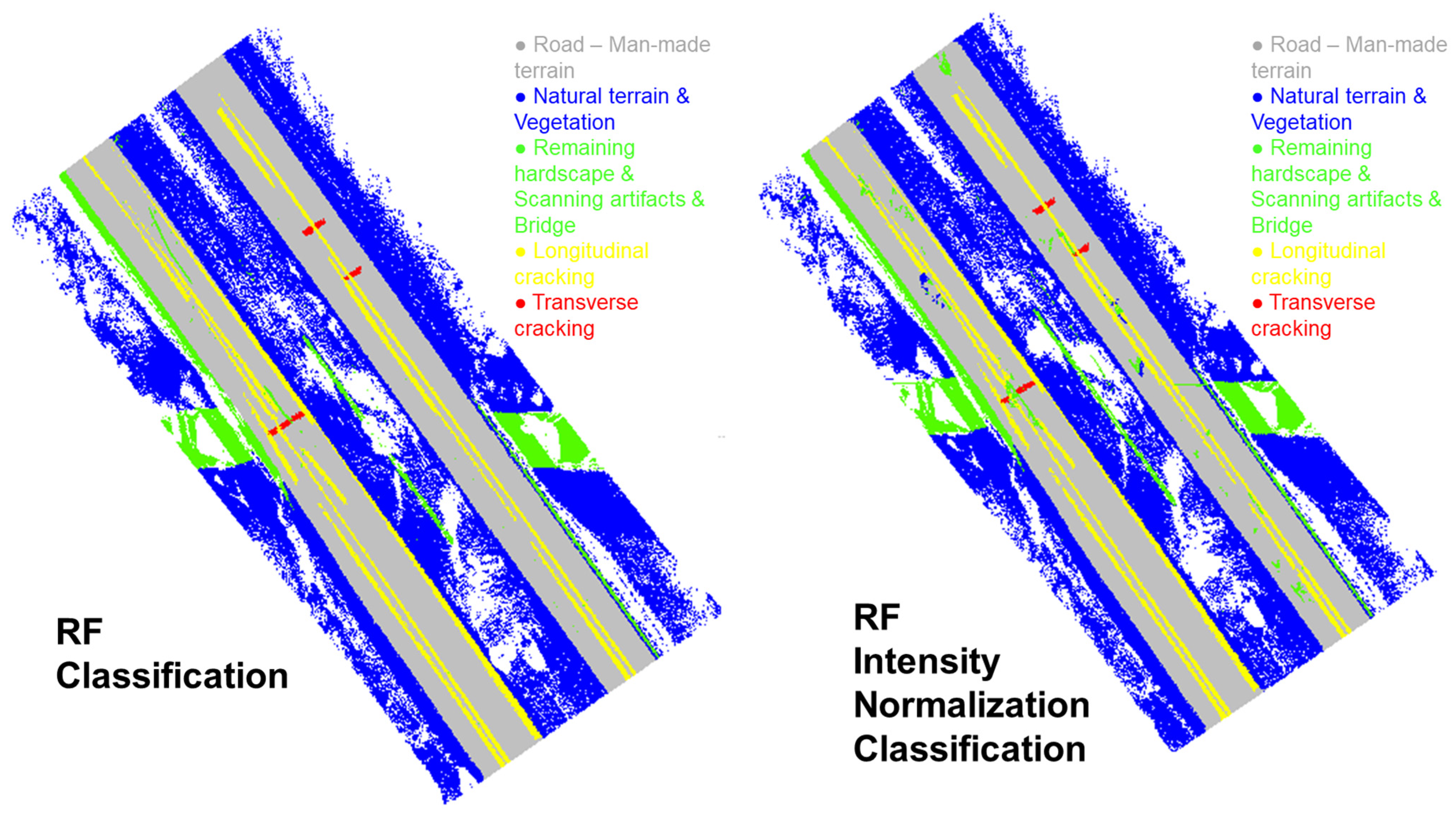
3.1. Comparative Analysis of DBSCAN and Random Forest with and Without Intensity Normalization
- -
- Man Made Terrain and Road: Primarily consisting of the road surface itself;
- -
- Natural Terrain and Vegetation: Areas covered by natural elements such as grass, soil, and trees;
- -
- Remaining Hardscape, Scanning Artifacts, and Bridge Components: Additional hard surfaces, including sidewalks, curbs, bridge structures, and scanning-related artifacts;
- -
- Longitudinal Cracking: Cracks running parallel to the road’s direction;
- -
- Transverse Cracking: Cracks oriented perpendicular to the road’s direction.
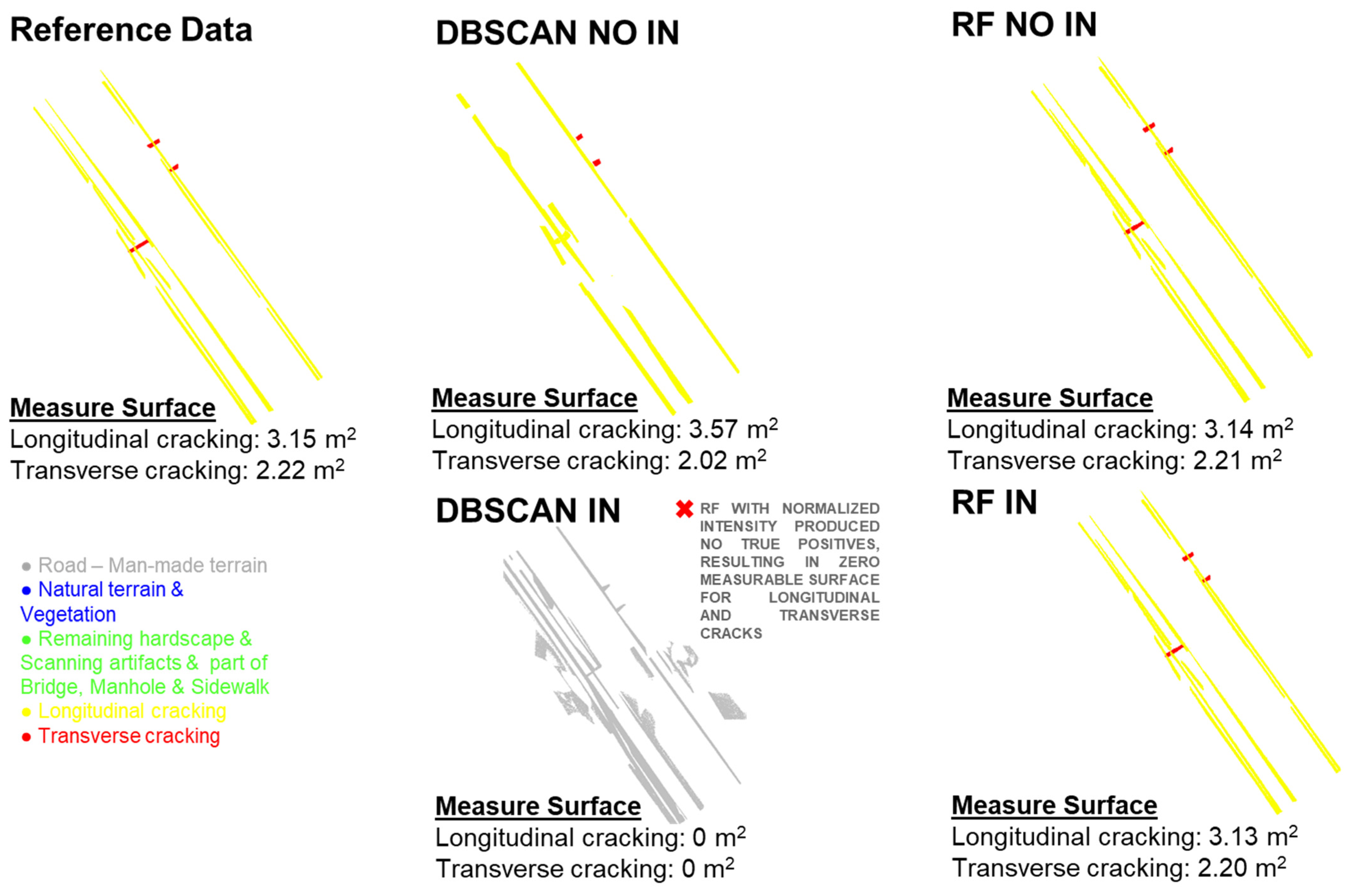
3.2. Crack Detection Analysis in LiDAR Point Cloud Data
- -
- Minor cracks: 0.5–2 m2 of cracks per 100 m of road;
- -
- Obvious cracks: 2–10 m2 per 100 m;
- -
- Severely damaged roads: More than 10 m2 per 100 m.
4. Discussion
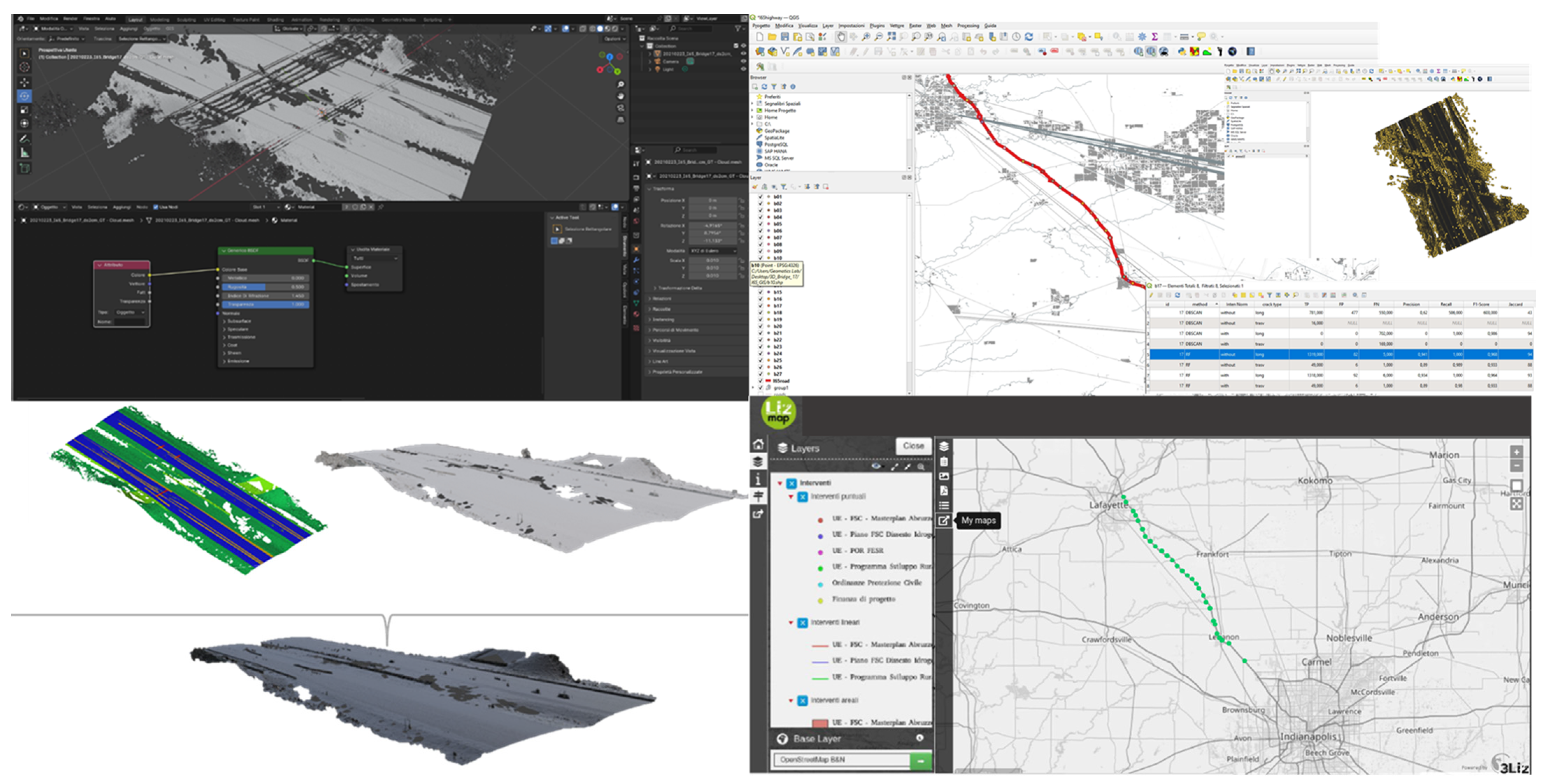
4.1. Open-Source 3D WebGIS for Crack Visualization and Management
- -
- Visualization of georeferenced crack detection results overlaid on road network data;
- -
- Prioritization of maintenance interventions based on severity and spatial distribution of cracks;
- -
- Integration with national and international road maintenance guidelines, such as INDOT (Indiana Department of Transportation), to support data-driven decision-making;
- -
- User-friendly filtering and querying of spatial data, enabling targeted analysis by crack type, location, or risk level;
- -
- Scalability for global applications, such as road pavement monitoring, is a critical issue worldwide.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AG | Above Ground |
| BE | Bare Earth |
| CC | CloudCompare |
| CNN | Convolutional neural network |
| CS | Cloth simulation |
| CSF | Cloth Simulation Filtering |
| DBSCAN | Density-Based Spatial Clustering of Applications with Noise |
| DTM | Digital Terrain Model |
| FN | False negative |
| FP | False positive |
| GNSS | Global Navigation Satellite System |
| GNN | Graph neural network |
| IMU | Inertial Measurement Unit |
| IN | Intensity normalization |
| INDOT | Indiana Department of Transportation |
| INS | Inertial Navigation System |
| LiDAR | Light Detection and Ranging |
| LUT | Look-up table |
| MMS | Mobile Mapping System |
| MLS | Mobile Laser Scanning |
| NDT | Non-Destructive Testing |
| OA | Overall Accuracy |
| RF | Random Forest |
| ROI | Region of Interest |
| TP | True positive |
| WebGIS | Web Geographic Information Systems |
References
- Pascucci, N.; Shin, S.-Y.; Hodaei, M.; Dominici, D.; Habib, A. Comparative analysis of morphological (MCSS) and learning-based (SPG) strategies for detecting signage occlusions along transportation corridors. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, 48, 1651–1658. [Google Scholar] [CrossRef]
- Alicandro, M.; Dominici, D.; Pascucci, N.; Quaresima, R.; Zollini, S. Enhanced algorithms to extract decay forms of concrete infrastructures from UAV photogrammetric data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, 48, 9–15. [Google Scholar] [CrossRef]
- Alsheyab, M.A.; Khasawneh, M.A.; Abualia, A.; Sawalha, A. A critical review of fatigue cracking in asphalt concrete pavement: A challenge to pavement durability. Innov. Infrastruct. Solut. 2024, 9, 386. [Google Scholar] [CrossRef]
- Ministry of Infrastructure and Transport—MIT. Linee Guida per la Classificazione e Gestione del Rischio, la Valutazione Della Sicurezza ed il Monitoraggio dei Ponti Esistenti. 2020. Available online: https://www.mit.gov.it/sites/default/files/media/notizia/2020-05/1_Testo_Linee_Guida_ponti.pdf (accessed on 21 April 2025).
- Cantisani, G.; Borrelli, C.C.; Del Serrone, G.; Peluso, P. Optimizing Road Safety Inspections on Rural Roads. Infrastructures 2023, 8, 30. [Google Scholar] [CrossRef]
- European Commission. EU Road Safety Policy Framework 2021–2030-Next Steps Towards “Vision Zero”. 2019. Available online: https://www.europarl.europa.eu/doceo/document/A-9-2021-0211_EN.html#_section2 (accessed on 28 December 2024).
- Sinha, K.C.; McCullouch, B.G.; Bullock, D.M.; Konduri, S.; Fricker, J.D.; Labi, S. An Evaluation of the Hyperfix Project for the Reconstruction of I-65/I-70 in Downtown Indianapolis; Final Report No. FHWA/IN/JTRP-2004/2; School of Civil Engineering, Purdue University: West Lafayette, IN, USA, 2003. [Google Scholar]
- Luo, S.; Bai, T.; Guo, M.; Wei, Y.; Ma, W. Impact of Freeze–Thaw Cycles on the Long-Term Performance of Concrete Pavement and Related Improvement Measures: A Review. Materials 2022, 15, 4568. [Google Scholar] [CrossRef]
- Leal Filho, W.; Abeldaño Zuñiga, R.A.; Sierra, J.; Dinis, M.A.P.; Corazza, L.; Nagy, G.J.; Aina, Y.A. An assessment of priorities in handling climate change impacts on infrastructures. Sci. Rep. 2024, 14, 14147. [Google Scholar] [CrossRef]
- Javanmardi, M.; Javanmardi, E.; Gu, Y.; Kamijo, S. Towards High-Definition 3D Urban Mapping: Road Feature-Based Registration of Mobile Mapping Systems and Aerial Imagery. Remote Sens. 2017, 9, 975. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Manish, R.; Bullock, D.; Habib, A. Comparative Analysis of Different Mobile LiDAR Mapping Systems for Ditch Line Characterization. Remote Sens. 2021, 13, 2485. [Google Scholar] [CrossRef]
- Ravi, R.; Bullock, D.; Habib, A. Pavement Distress and Debris Detection using a Mobile Mapping System with 2D Profiler LiDAR. Transp. Res. Rec. 2021, 2675, 428–438. [Google Scholar] [CrossRef]
- Wong, K.; Gu, Y.; Kamijo, S. Mapping for autonomous driving: Opportunities and challenges. IEEE Intell. Transp. Syst. Mag. 2021, 13, 91–106. [Google Scholar] [CrossRef]
- Zhou, Y.; Guo, X.; Hou, F.; Wu, J. Review of Intelligent Road Defects Detection Technology. Sustainability 2022, 14, 6306. [Google Scholar] [CrossRef]
- Elhashash, M.; Albanwan, H.; Qin, R. A Review of Mobile Mapping Systems: From Sensors to Applications. Sensors 2022, 22, 4262. [Google Scholar] [CrossRef]
- Zhong, M.; Sui, L.; Wang, Z.; Hu, D. Pavement Crack Detection from Mobile Laser Scanning Point Clouds Using a Time Grid. Sensors 2020, 20, 4198. [Google Scholar] [CrossRef]
- Yan, Y.; Mao, Z.; Wu, J.; Padir, T.; Hajjar, J.F. Towards automated detection and quantification of concrete cracks using integrated images and lidar data from unmanned aerial vehicles. Struct. Control Health Monit. 2021, 28, e2757. [Google Scholar] [CrossRef]
- Munawar, H.S.; Hammad, A.W.A.; Haddad, A.; Soares, C.A.P.; Waller, S.T. Image-Based Crack Detection Methods: A Review. Infrastructures 2021, 6, 115. [Google Scholar] [CrossRef]
- Yu, J.; Jiang, J.; Fichera, S.; Paoletti, P.; Layzell, L.; Mehta, D.; Luo, S. Road Surface Defect Detection—From Image-Based to Non-Image-Based: A Survey. IEEE Trans. Intell. Transp. Syst. 2024, 25, 10581–10603. [Google Scholar] [CrossRef]
- Yuan, Q.; Shi, Y.; Li, M. A Review of Computer Vision-Based Crack Detection Methods in Civil Infrastructure: Progress and Challenges. Remote Sens. 2024, 16, 2910. [Google Scholar] [CrossRef]
- Deng, J.; Singh, A.; Zhou, Y.; Lu YLee, V.C.S. Review on computer vision-based crack detection and quantification methodologies for civil structures. Constr. Build. Mater. 2022, 356, 129238. [Google Scholar] [CrossRef]
- Gallwey, J.; Eyre MCoggan, J. A machine learning approach for the detection of supporting rock bolts from laser scan data in an underground mine. Tunn. Undergr. Space Technol. 2021, 107, 103656. [Google Scholar] [CrossRef]
- Xin, H.; Ye, Y.; Na, X.; Hu, H.; Wang, G.; Wu, C.; Hu, S. Sustainable Road Pothole Detection: A Crowdsourcing Based Multi-Sensors Fusion Approach. Sustainability 2023, 15, 6610. [Google Scholar] [CrossRef]
- Singh, N.A.; Kishore, K.; Deo, R.N.; Lu, Y.; Kodikara, J. Automated Segmentation Framework for Asphalt Layer Thickness from GPR Data Using a Cascaded k-Means—DBSCAN Algorithm. J. Environ. Eng. Geophys. 2022, 27, 179–189. [Google Scholar] [CrossRef]
- Wang, H.; Barone, G.; Smith, A. Current and future role of data fusion and machine learning in infrastructure health monitoring. Struct. Infrastruct. Eng. 2023, 20, 1853–1882. [Google Scholar] [CrossRef]
- Sheridan, K.; Puranik, T.G.; Mangortey, E.; Pinon-Fischer, O.J.; Kirby, M.; Mavris, D.N. An application of dbscan clustering for flight anomaly detection during the approach phase. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 1851. [Google Scholar] [CrossRef]
- Paul, A.; Mukherjee, D.P.; Das, P.; Gangopadhyay, A.; Chintha, A.R.; Kundu, S. Improved Random Forest for Classification. IEEE Trans. Image Process 2018, 27, 4012–4024. [Google Scholar] [CrossRef]
- Genuer, R.; Poggi, J.M. Random Forests. In Random Forests with R. Use R! Springer: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- del Río-Barral, P.; Soilán, M.; González-Collazo, S.M.; Arias, P. Pavement Crack Detection and Clustering via Region-Growing Algorithm from 3D MLS Point Clouds. Remote Sens. 2022, 14, 5866. [Google Scholar] [CrossRef]
- Wang, Q.; Nguyen, T.T.; Huang, J.Z.; Nguyen, T.T. An efficient random forests algorithm for high dimensional data classification. Adv. Data Anal. Classif. 2018, 12, 953–972. [Google Scholar] [CrossRef]
- Belloni, V.; Sjölander, A.; Ravanelli, R.; Crespi, M.; Nascetti, A. Tack project: Tunnel and bridge automatic crack monitoring using deep learning and photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 741–745. [Google Scholar] [CrossRef]
- Pascucci, N.; Alicandro, M.; Zollini, S.; Dominici, D. Improving Infrastructure Monitoring: UAV-Based Photogrammetry for Crack Pattern Inspection. In Proceedings of the Future Technologies Conference (FTC) 2024, Volume 1; FTC 2024. Lecture Notes in Networks and Systems. Arai, K., Ed.; Springer: Cham, Switzerland, 2024; Volume 1154. [Google Scholar] [CrossRef]
- Alicandro, M.; Zollini, S.; Oxoli, D.; Pascucci, N.; Dominici, D.; Brescia, D. Design and implementation of an open-source web-GIS to manage the public works of Abruzzo Region: An example towards the digitalization of the management process of public administrations. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 48, 21–26. [Google Scholar] [CrossRef]
- Riegl, VUX-1HA Datasheet. Available online: http://www.riegl.com/uploads/tx_pxpriegldownloads/DataSheet_VUX-1HA__2015-10-06.pdf (accessed on 14 December 2024).
- Z+F, Profiler 9012. Available online: https://www.zofre.de/en/laser-scanners/2d-laser-scanner/z-fprofilerr-9012 (accessed on 14 December 2024).
- Novatel, IMU-ISA-100C. Available online: https://docs.novatel.com/OEM7/Content/Technical_Specs_IMU/ISA_100C_Performance.htm (accessed on 14 December 2024).
- Ravi, R.; Bullock, D.; Habib, A. Highway and airport runway pavement inspection using mobile LiDAR. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 349–354. [Google Scholar] [CrossRef]
- Previtali, M.; Brumana, R.; Banfi, F. Existing infrastructure cost effective informative modelling with multisource sensed data: TLS, MMS and photogrammetry. Appl. Geomat. 2022, 14 (Suppl. S1), 21–40. [Google Scholar] [CrossRef]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Lin, Y.C.; Habib, A. Quality control and crop characterization framework for multi-temporal UAV LiDAR data over mechanized agricultural fields. Remote Sens. Environ. 2021, 256, 112299. [Google Scholar] [CrossRef]
- Parajuli, A.; Celenk, M.; Riley, H. Robust Lane Detection in Shadows and Low Illumination Conditions using Local Gradient Features. Open J. Appl. Sci. 2013, 3, 68–74. [Google Scholar] [CrossRef]
- Cheng, Y.-T.; Patel, A.; Wen, C.; Bullock, D.; Habib, A. Intensity Thresholding and Deep Learning Based Lane Marking Extraction and Lane Width Estimation from Mobile Light Detection and Ranging (LiDAR) Point Clouds. Remote Sens. 2020, 12, 1379. [Google Scholar] [CrossRef]
- Cheng, Y.-T.; Lin, Y.-C.; Habib, A. Generalized LiDAR Intensity Normalization and Its Positive Impact on Geometric and Learning-Based Lane Marking Detection. Remote Sens. 2022, 14, 4393. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Densitybased Algorithm for Discovering Clusters in Large Spatial Databases with Noise; KDD: Tokyo, Japan, 1996; Volume 96, pp. 226–231. [Google Scholar]
- Civera, M.; Sibille, L.; Fragonara, L.Z.; Ceravolo, R. A DBSCAN-Based Automated Operational Modal Analysis Algorithm for Bridge Monitoring. Measurement 2023, 208, 112451. [Google Scholar] [CrossRef]
- del Río-Barral, P.; Grandío, J.; Riveiro, B.; Arias, P. Identification of relevant point cloud geometric features for the detection of pavement cracks using MLS data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, 48, 107–112. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Ghose, M.K.; Pradhan RGhose, S.S. Decision tree classification of remotely sensed satellite data using spectral separability matrix. Int. J. Adv. Comput. Sci. Appl. 2010, 1. [Google Scholar] [CrossRef]
- Shokirov, S.; Schaefer, M.; Levick, S.R.; Jucker, T.; Borevitz, J.; Abdurahmanov, I.; Youngentob, K. Multi-platform LiDAR approach for detecting coarse woody debris in a landscape with varied ground cover. Int. J. Remote Sens. 2021, 42, 93249350. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A Probabilistic Interpretation of Precision, Recall and F-Score, with Implication for Evaluation. In Advances in Information Retrieval; ECIR 2005 Lecture Notes in Computer Science; Losada, D.E., Fernández-Luna, J.M., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; Volume 3408. [Google Scholar] [CrossRef]
- Jaccard, P. Étude comparative de la distribution florale dans une portion des Alpes et des Jura. Bull. Société Vaudoise Des. Sci. Nat. 1901, 37, 547–579. [Google Scholar]
- Jaccard, P. The Distribution of the Flora of the Alpine Zone. New Phytol. 1912, 11, 37–50. [Google Scholar] [CrossRef]
- Coetzee, S.; Ivánová, I.; Mitasova, H.; Brovelli, M.A. Open Geospatial Software and Data: A Review of the Current State and A Perspective into the Future. ISPRS Int. J. Geo-Inf. 2020, 9, 90. [Google Scholar] [CrossRef]
- Open Geospatial Consortium. Available online: https://www.opengeospatial.org/standards (accessed on 21 February 2025).
- Rosas-Chavoya, M.; Gallardo-Salazar, J.L.; López-Serrano, P.M.; Alcántara-Concepción, P.C.; León-Miranda, A.K. QGIS a constantly growing free and open-source geospatial software contributing to scientific development. Cuad. De Investig. Geográfica 2022, 48, 197–213. Available online: https://publicaciones.unirioja.es/ojs/index.php/cig/article/view/5143 (accessed on 24 February 2025). [CrossRef]
- Fatmawati, T.; Syaifudin, Y.W.; Rahmadani, A.; Rosandy, M.; Kyaw HH, S. Optimizing Irrigation Infrastructure Management with Web-Based Technologies and OpenStreetMap. Integr. J. Front. Technol. Eng. 2024, 3, 54–68. [Google Scholar]
- Piccoli, F.; Locatelli, S.G.; Schettini, R.; Napoletano, P. An Open-Source Platform for GIS Data Management and Analytics. Sensors 2023, 23, 3788. [Google Scholar] [CrossRef]
- Ong, G.; Nantung, T.E.; Sinha, K.C. Indiana Pavement Preservation Program; Publication FHWA/IN/JTRP-2010/14; Joint Transportation Research Program, Indiana Department of Transportation and Purdue University: West Lafayette, IN, USA, 2010. [Google Scholar] [CrossRef]
- Indiana LTAP. Indiana Local Road and Bridge Conditions. Indiana Local Technical Assistance Program (LTAP) Publications. Paper 111; 2016. Available online: https://docs.lib.purdue.edu/inltappubs/111 (accessed on 21 April 2025).
- Eltouny, K.; Gomaa, M.; Liang, X. Unsupervised Learning Methods for Data-Driven Vibration-Based Structural Health Monitoring: A Review. Sensors 2023, 23, 3290. [Google Scholar] [CrossRef]
- Ju, S.; Li, D.; Jia, J. Machine-learning-based methods for crack classification using acoustic emission technique. Mech. Syst. Signal Process. 2022, 178, 109253. [Google Scholar] [CrossRef]
- Yao, Y.; Tung, S.-T.E.; Glisic, B. Crack detection and characterization techniques—An overview. Struct. Control Health Monit. 2014, 21, 1387–1413. [Google Scholar] [CrossRef]
- Khlifati, O.; Baba, K.; Tayeh, B.A. Survey of automated crack detection methods for asphalt and concrete structures. Innov. Infrastruct. Solut. 2024, 9, 438. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| TP | FP | FN | Precision | Recall | F1-Score | |
|---|---|---|---|---|---|---|
| Man made Terrain and Road | 0 | 0 | 2652 | NaN | 0.000 | NaN |
| Natural Terrain and Vegetation | 1140 | 899 | 3847 | 0.559 | 0.228 | 0.324 |
| Remaining Hardscape and Scanning Artifacts | 58 | 135 | 324 | 0.300 | 0.151 | 0.0201 |
| Longitudinal Cracking | 781 | 477 | 550 | 0.620 | 0.586 | 0.603 |
| Transversal Cracking | 16 | 4 | 33 | 0.800 | 0.326 | 0.463 |
| Overall Accuracy | 68% | |||||
| TP | FP | FN | Precision | Recall | F1-Score | |
|---|---|---|---|---|---|---|
| Man made Terrain and Road | 859 | 2300 | 1796 | 0.271 | 0.323 | 0.295 |
| Natural Terrain and Vegetation | 3315 | 3466 | 1635 | 0.488 | 0.669 | 0.565 |
| Remaining Hardscape and Scanning Artifacts | 0 | 0 | 398 | NaN | 0.000 | NaN |
| Longitudinal Cracking | 0 | 0 | 1332 | NaN | 0.000 | NaN |
| Transversal Cracking | 0 | 0 | 49 | NaN | 0.000 | NaN |
| Overall Accuracy | 75% | |||||
| TP | FP | FN | Precision | Recall | F1-Score | |
|---|---|---|---|---|---|---|
| Man made Terrain and Road | 1920 | 9 | 1418 | 0.995 | 0.720 | 0.836 |
| Natural Terrain and Vegetation | 4590 | 600 | 376 | 0.884 | 0.924 | 0.903 |
| Remaining Hardscape and Scanning Artifacts | 352 | 480 | 33 | 0.423 | 0.914 | 0.578 |
| Longitudinal Cracking | 1319 | 82 | 5 | 0.941 | 0.996 | 0.968 |
| Transversal Cracking | 49 | 6 | 1 | 0.890 | 0.989 | 0.933 |
| Overall Accuracy | 94% | |||||
| TP | FP | FN | Precision | Recall | F1-Score | |
|---|---|---|---|---|---|---|
| Man made Terrain and Road | 1866 | 25 | 798 | 0.986 | 0.700 | 0.819 |
| Natural Terrain and Vegetation | 4483 | 704 | 483 | 0.864 | 0.902 | 0.883 |
| Remaining Hardscape and Scanning Artifacts | 349 | 563 | 36 | 0.382 | 0.906 | 0.538 |
| Longitudinal Cracking | 1318 | 92 | 6 | 0.934 | 0.995 | 0.964 |
| Transversal Cracking | 49 | 6 | 1 | 0.890 | 0.980 | 0.933 |
| Overall Accuracy | 93% | |||||
| Type of Cracking | TP | FP | FN | Jaccard Index | |
|---|---|---|---|---|---|
| DBSCAN No IN | Longitudinal | 781 | 477 | 550 | 43% |
| Transversal | 16 | 4 | 33 | 30% | |
| DBSCAN IN | Longitudinal | 0 | 0 | 702 | 0% |
| Transversal | 0 | 0 | 169 | 0% | |
| RF No IN | Longitudinal | 1319 | 82 | 5 | 94% |
| Transversal | 49 | 6 | 1 | 88% | |
| RF IN | Longitudinal | 1318 | 92 | 6 | 93% |
| Transversal | 49 | 6 | 1 | 88% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pascucci, N.; Dominici, D.; Habib, A. LiDAR-Based Road Cracking Detection: Machine Learning Comparison, Intensity Normalization, and Open-Source WebGIS for Infrastructure Maintenance. Remote Sens. 2025, 17, 1543. https://doi.org/10.3390/rs17091543
Pascucci N, Dominici D, Habib A. LiDAR-Based Road Cracking Detection: Machine Learning Comparison, Intensity Normalization, and Open-Source WebGIS for Infrastructure Maintenance. Remote Sensing. 2025; 17(9):1543. https://doi.org/10.3390/rs17091543
Chicago/Turabian StylePascucci, Nicole, Donatella Dominici, and Ayman Habib. 2025. "LiDAR-Based Road Cracking Detection: Machine Learning Comparison, Intensity Normalization, and Open-Source WebGIS for Infrastructure Maintenance" Remote Sensing 17, no. 9: 1543. https://doi.org/10.3390/rs17091543
APA StylePascucci, N., Dominici, D., & Habib, A. (2025). LiDAR-Based Road Cracking Detection: Machine Learning Comparison, Intensity Normalization, and Open-Source WebGIS for Infrastructure Maintenance. Remote Sensing, 17(9), 1543. https://doi.org/10.3390/rs17091543