1. Introduction
Since the BeiDou Navigation Satellite System (BDS) became fully operational in 2020, the global navigation satellite system (GNSS) has an improved overall performance and offers more reliable service for global users [
1]. Since then, the number of in-orbit satellites in GNSS has increased considerably as has the amount of data GNSS produced [
2]. This development is a boon for boosting the navigation and positioning accuracy of GNSS [
3]. However, as more and more satellites become involved in navigation and positioning tasks, the navigation receiver must process an increasingly large amount of GNSS data. This heavy computational burden diminishes the real-time performance of navigation and positioning operations [
4,
5]. Moreover, once a receiver has procured sufficient GNSS data, there is not a significant improvement in the positioning accuracy, even if more satellites are involved in navigation and positioning [
6]. In this case, the excess GNSS data becomes redundant while still burdening computational software. Therefore, an appropriate satellite selection strategy becomes very essential for resourcefully utilizing GNSS data as well as heightening computational efficiency in navigation and positioning, which plays a key role in areas such as autonomous driving [
7] and drone navigation [
8] as shown in
Figure 1.
The traditional satellite selection algorithm can determine the optimal satellite combination through calculating the Geometric Dilution of Precisions (GDOP) of all the satellite combinations [
9]. The optimal satellite combination has the smallest GDOP. However, since a GDOP solution involves complex matrix multiplication and inversion operations, the computational load of calculating the GDOP for all combinations at a single epoch can skyrocket as the number of visible satellites increases, greatly reducing the efficiency of satellite selection algorithm. Refs. [
10,
11] have attempted to reduce the computational complexity of GDOP through the GDOP’s closed-form formulations to improve the efficiency of the satellite selection algorithm. Likewise, refs. [
12,
13] proposed a satellite selection algorithm in which the optimal satellite combination can be obtained through maximizing the volume of the polyhedron comprised by the unit vectors from the user to satellites. However, these satellite selection algorithms do not significantly reduce the computational costs or enhance the efficiency of satellite selection because the algorithms must still traverse all satellite combinations in the selection process.
To improve the efficiency of satellite selection, some algorithms have utilized the relationship between GDOP and the spatial geometry of the satellites for satellite selection rather than traversing all satellite combinations. By finding the convex geometric boundary containing all visible satellites, ref. [
14] determined the sub-optimal satellite combination, while ref. [
15] have developed a six-satellite selection algorithm by examining the impact of elevation and azimuth angles on GDOP. Ref. [
16] has analyzed the optimal configuration of 4–8 satellites through exhaustive computer enumeration, and proposed a FAST algorithm, which finds the best fit of the optimal configuration according to the elevation and azimuth angles of the satellites to obtain the optimal satellite selection result. Although these satellite selection algorithms are less time-consuming than those based on the traversing strategy alone, their GDOP performance is inferior. Refs. [
17,
18] combined the k-means clustering with the FAST algorithm, enhancing the selection efficiency. However, since the initial cluster centers cannot be precisely determined in this way, it is hard to guarantee the effectiveness of k-means clustering, thus leading to unreliable selection results. On the other hand, satellite selection algorithms based on the contribution of each visible satellite to GDOP have been explored too. Ref. [
19] employed the Sherman–Morrison formula and SVD decomposition to derive the contribution of each satellite to the GDOP of all visible satellites so that the most important satellites can be selected. Ref. [
20] also calculated the GDOP contribution of each satellite and then determined the selection result by removing the satellites whose contributions are below a certain threshold value. However, the removal of low contribution value satellites can alter the spatial geometry of the satellites so that the analysis does not yield a globally optimal satellite subset. To resolve this, based on the maximum tetrahedron volume method, ref. [
21] used the Sherman–Morrison formula and SVD decomposition recursively to yield increasingly optimal satellite selections. However, the traversing strategy is still required to obtain the initial subset with the maximum tetrahedron volume method, resulting in a heavy upfront computational load.
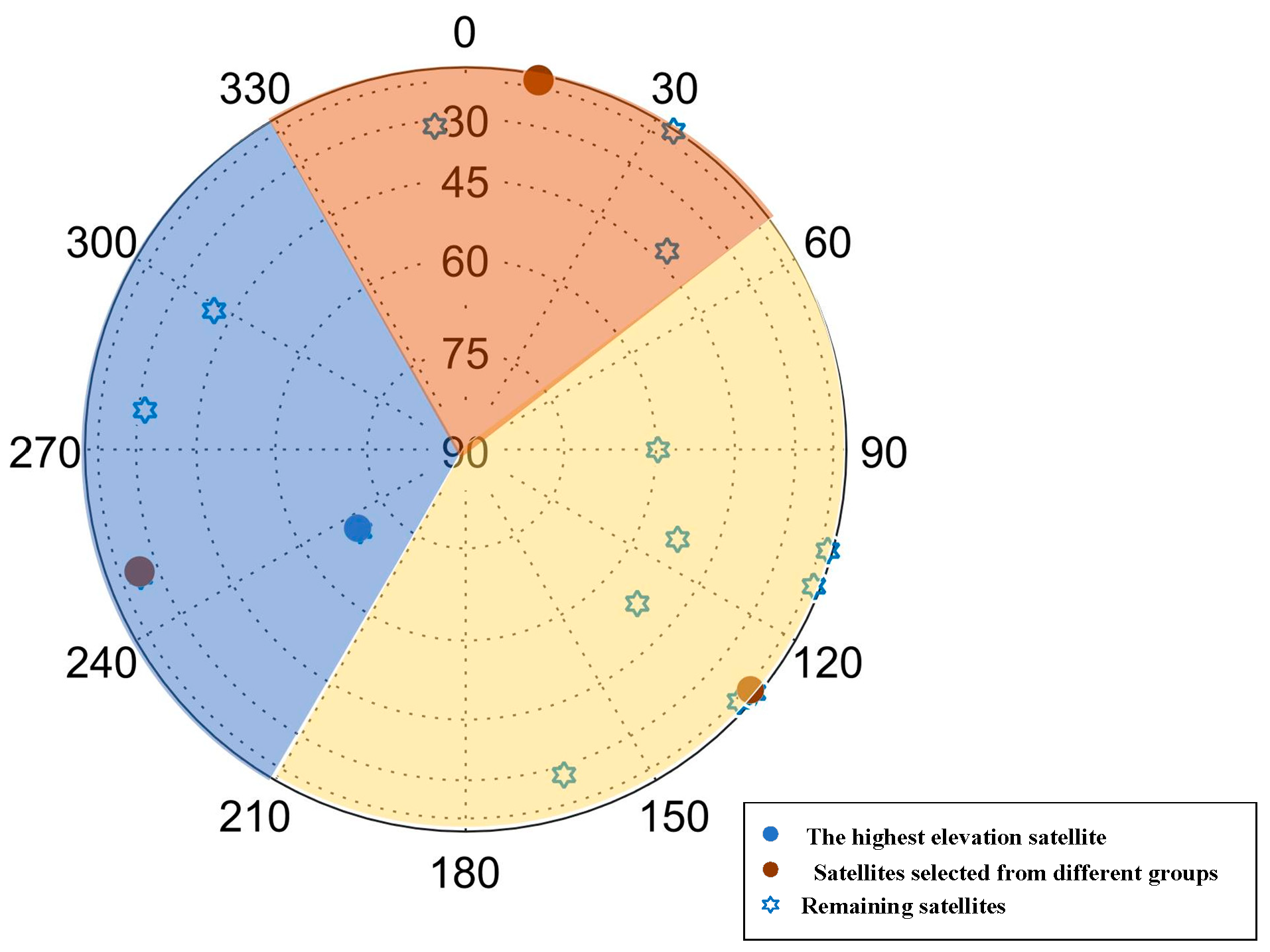
For these reasons, we have proposed a novel satellite selection method to rapidly select a relatively small optimal satellite subset for achieving real-time navigation and positioning with high precision. First, the hierarchical clustering algorithm is used to divide satellites into three groups. Then, we select one satellite from each group by maximizing the volume of the tetrahedron formed by the three satellites to be selected and the satellite with the highest elevation angle, then, we can determine the basic satellite subset. According to the impact of a given satellite on the GDOP of the basic satellite subset, the most important satellite is added to the basic satellite subset to construct a new subset. This operation is implemented iteratively to obtain the final satellite subset until the GDOP of the current subset meets positioning accuracy requirements.
Below,
Section 2 introduces the GDOP index and contains a fast satellite selection method based on hierarchical clustering and iterative optimization is proposed.
Section 3 then validates the effectiveness of this algorithm through simulation experiments, and
Section 4 concludes.
4. Conclusions
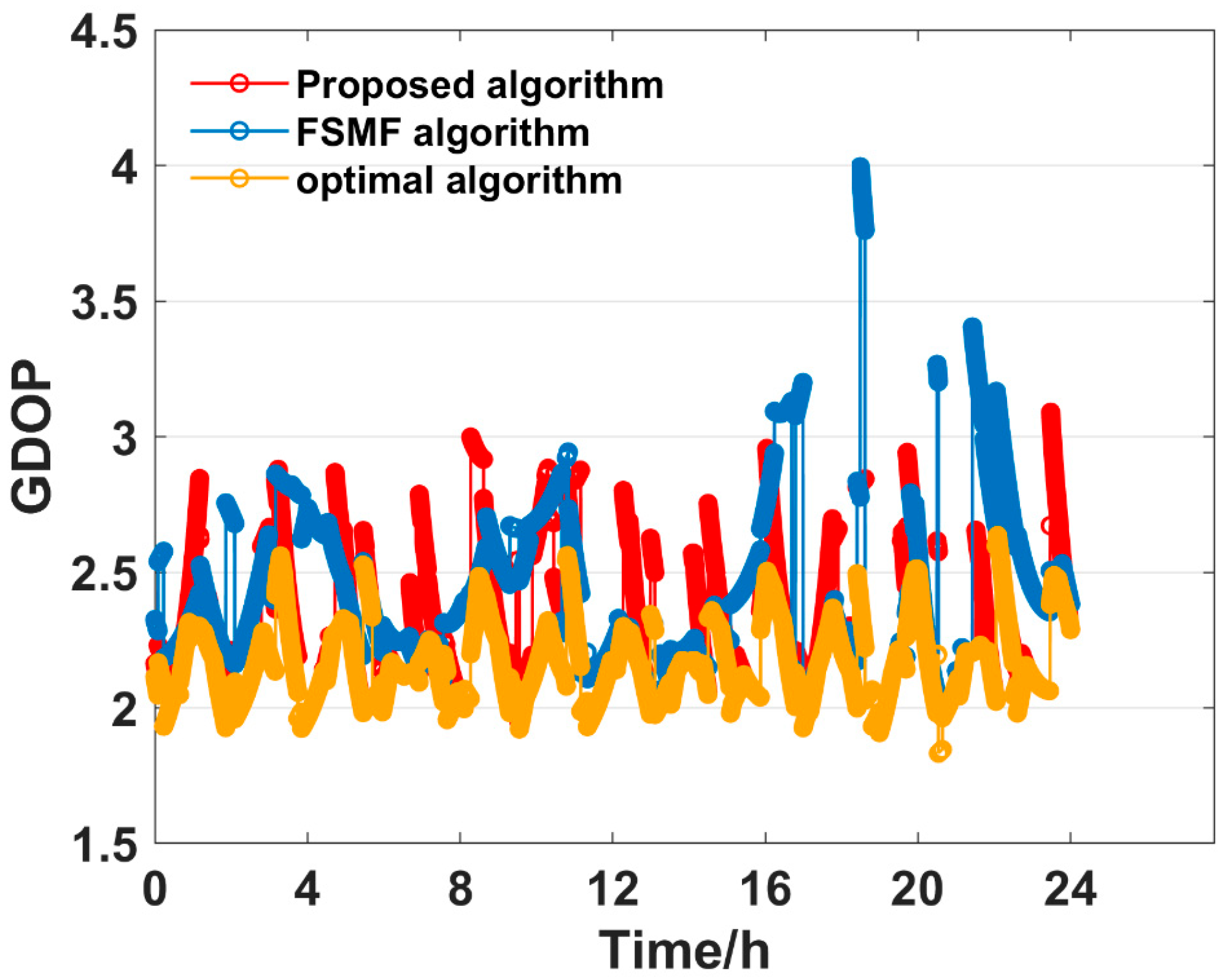
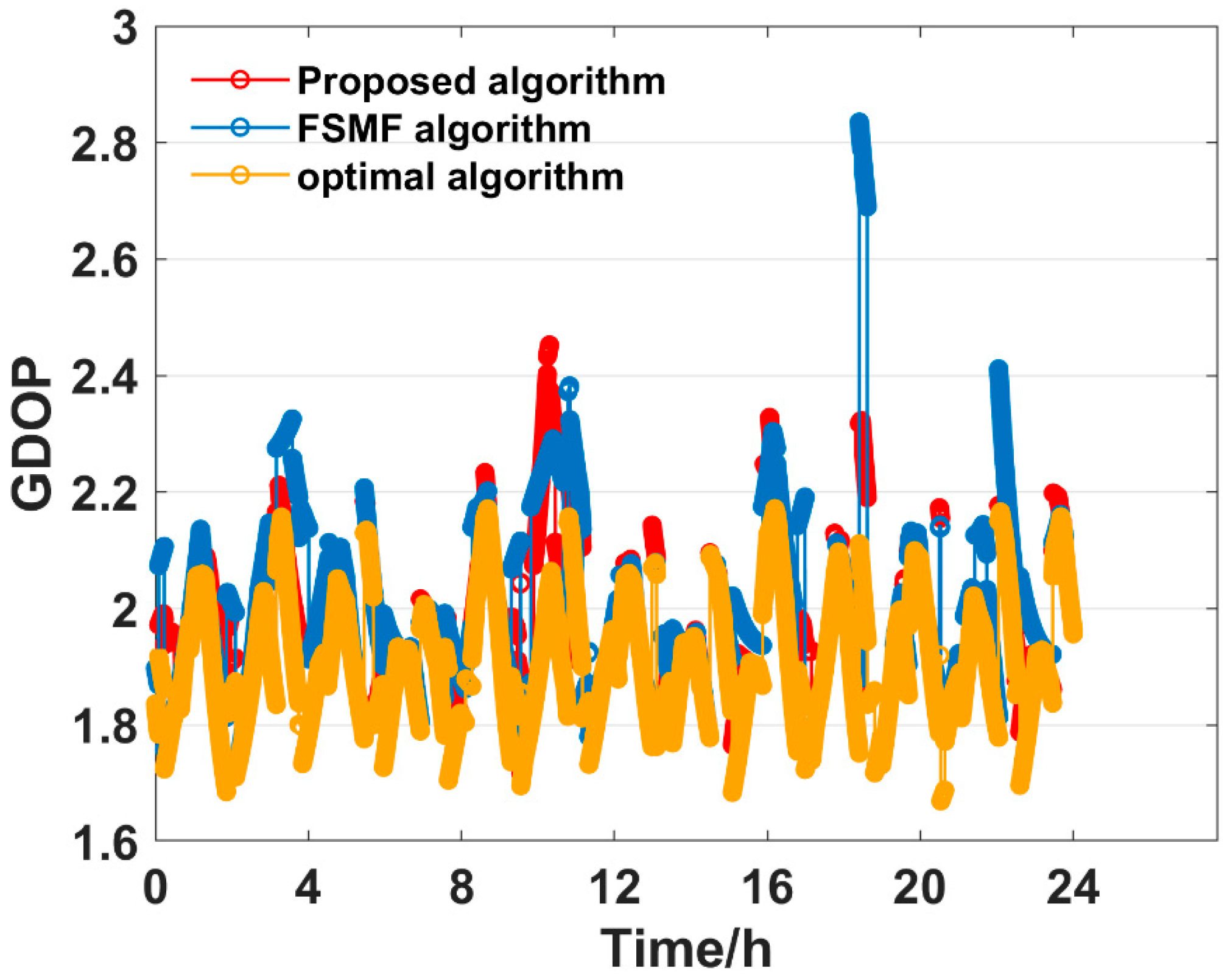
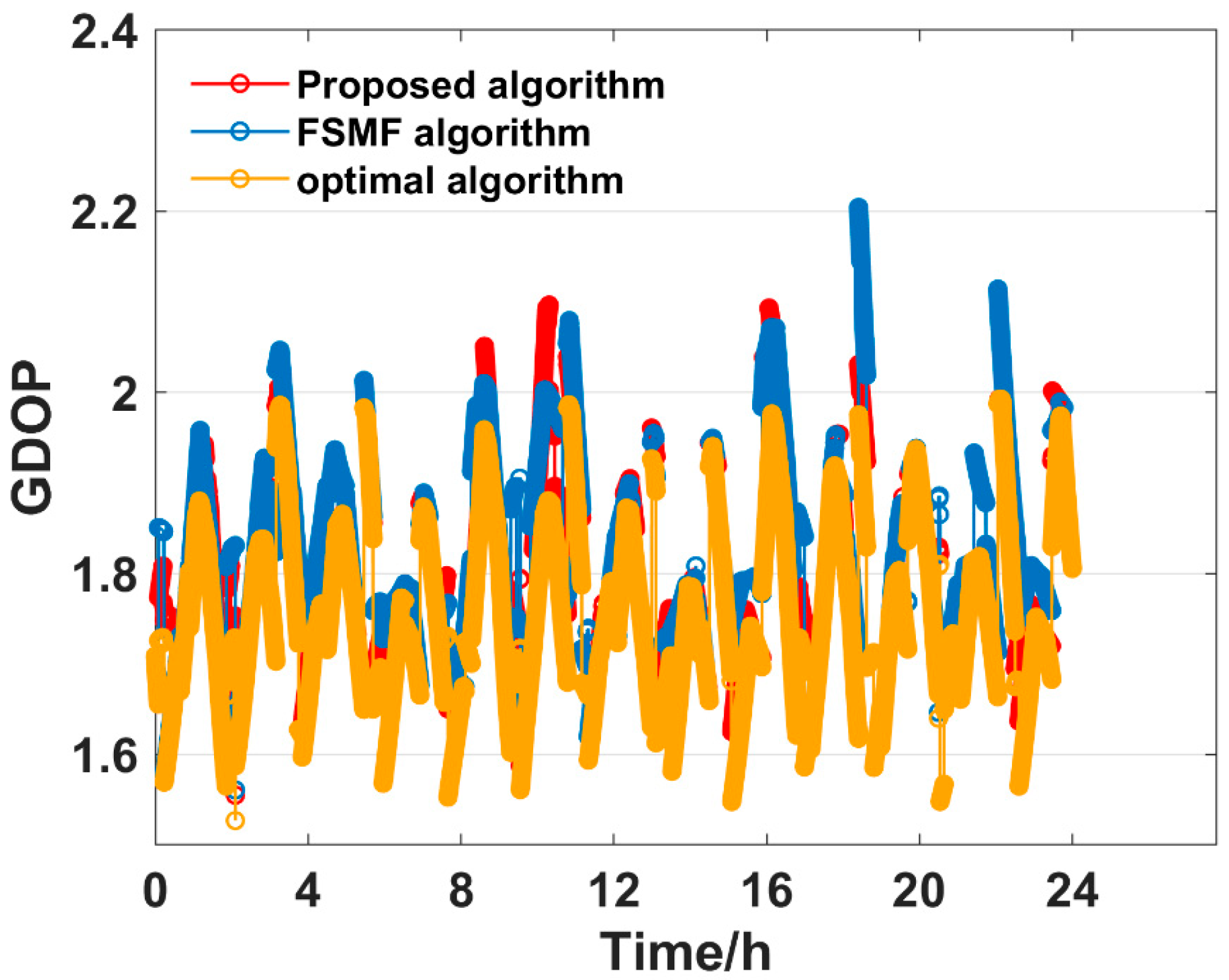
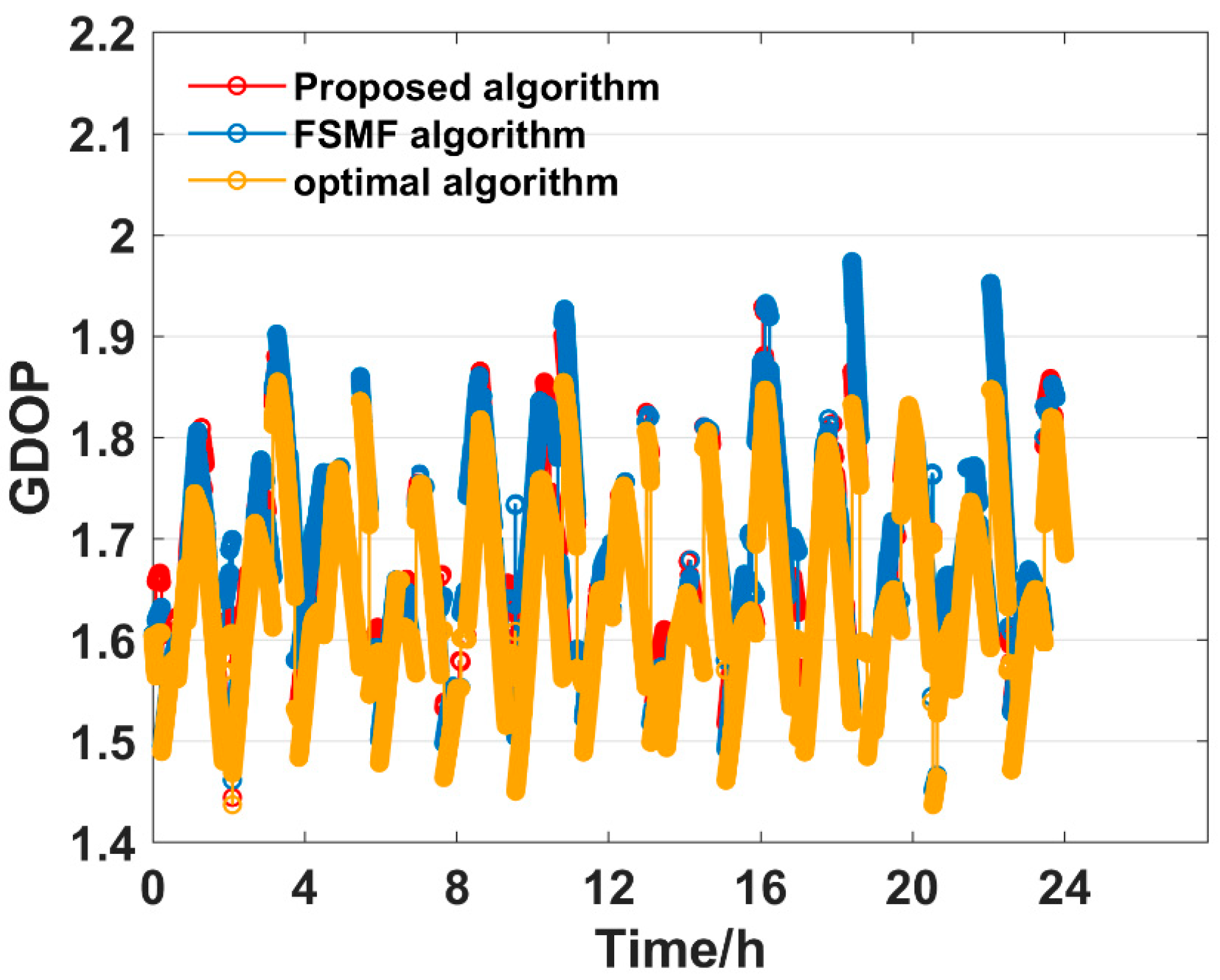
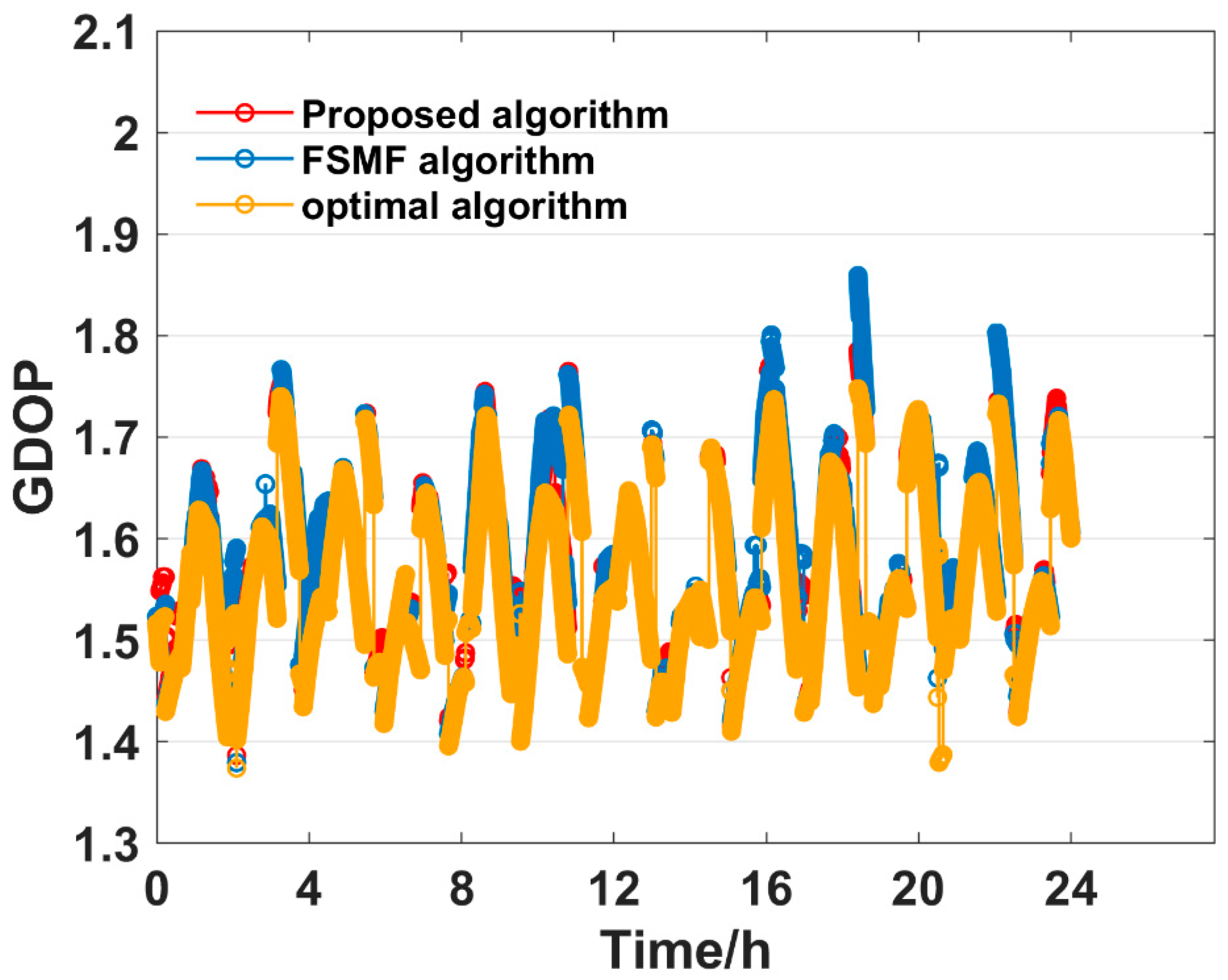
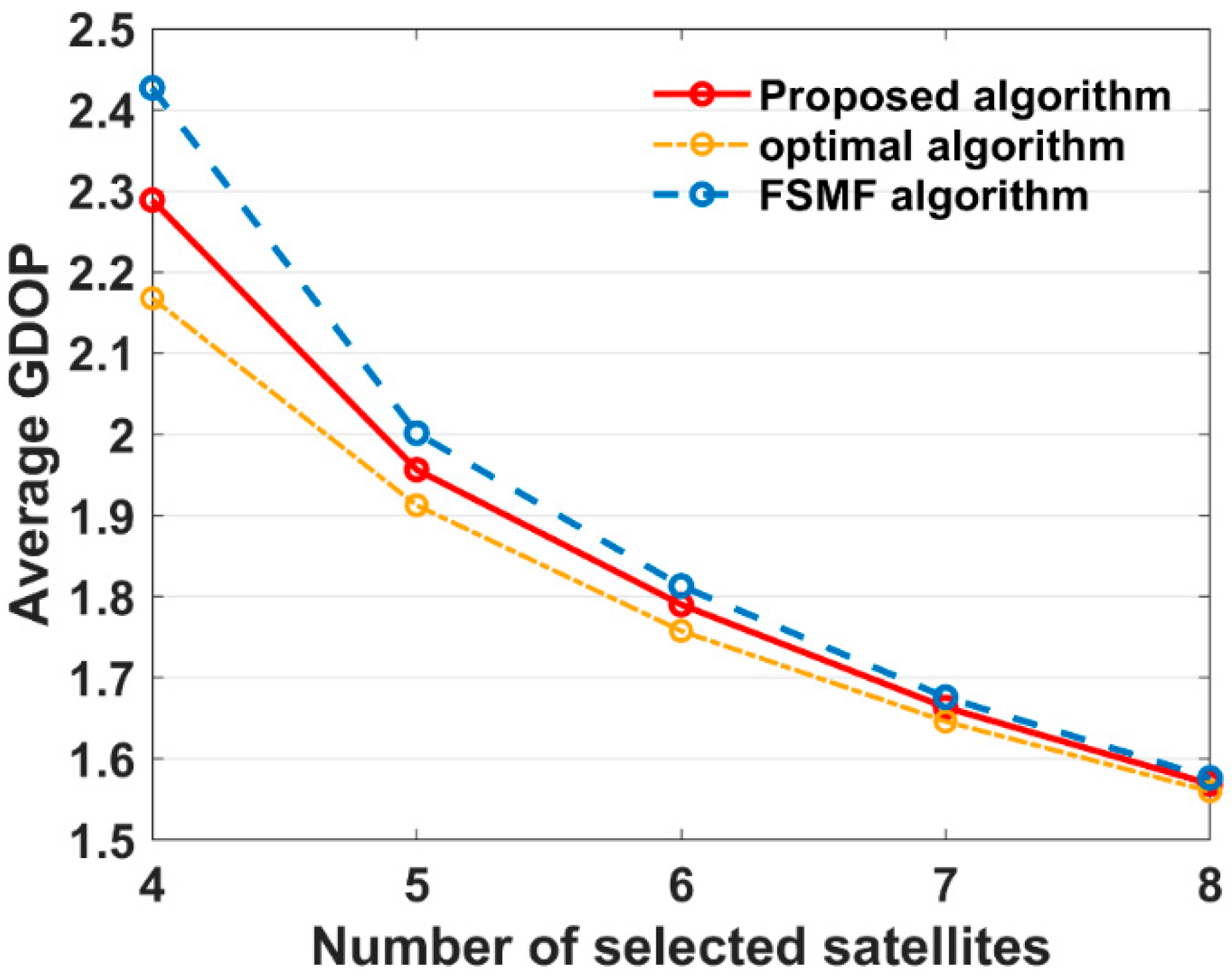
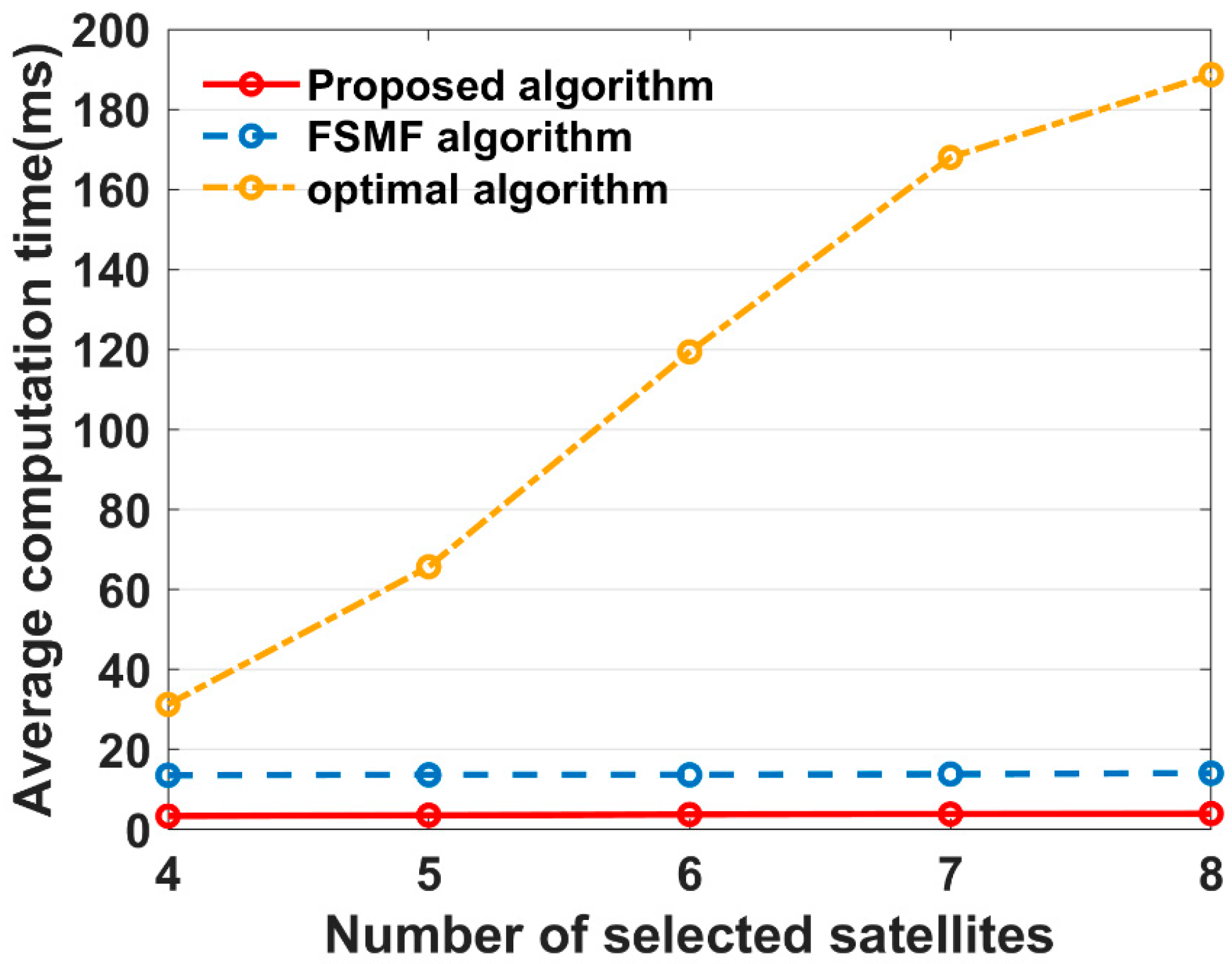
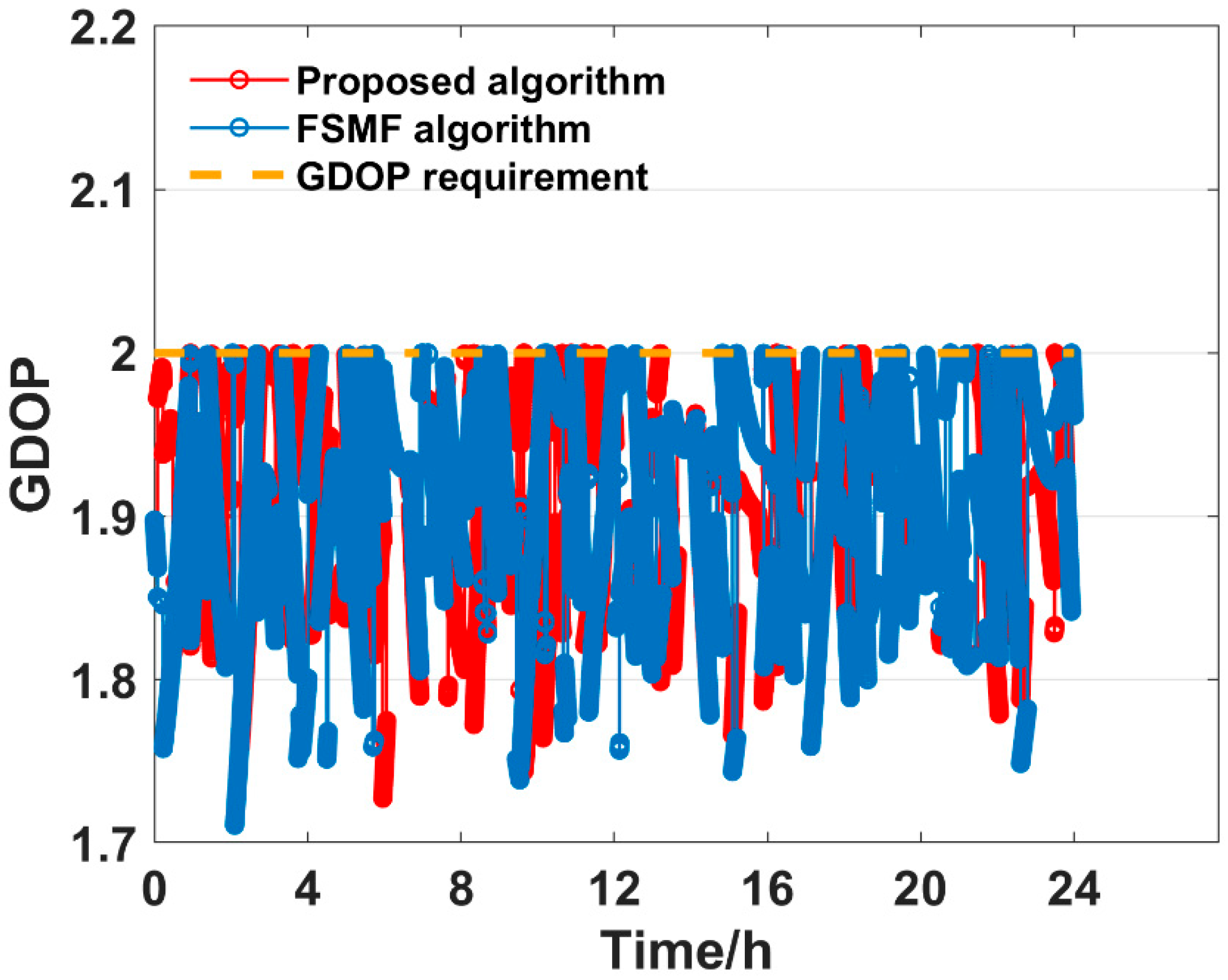
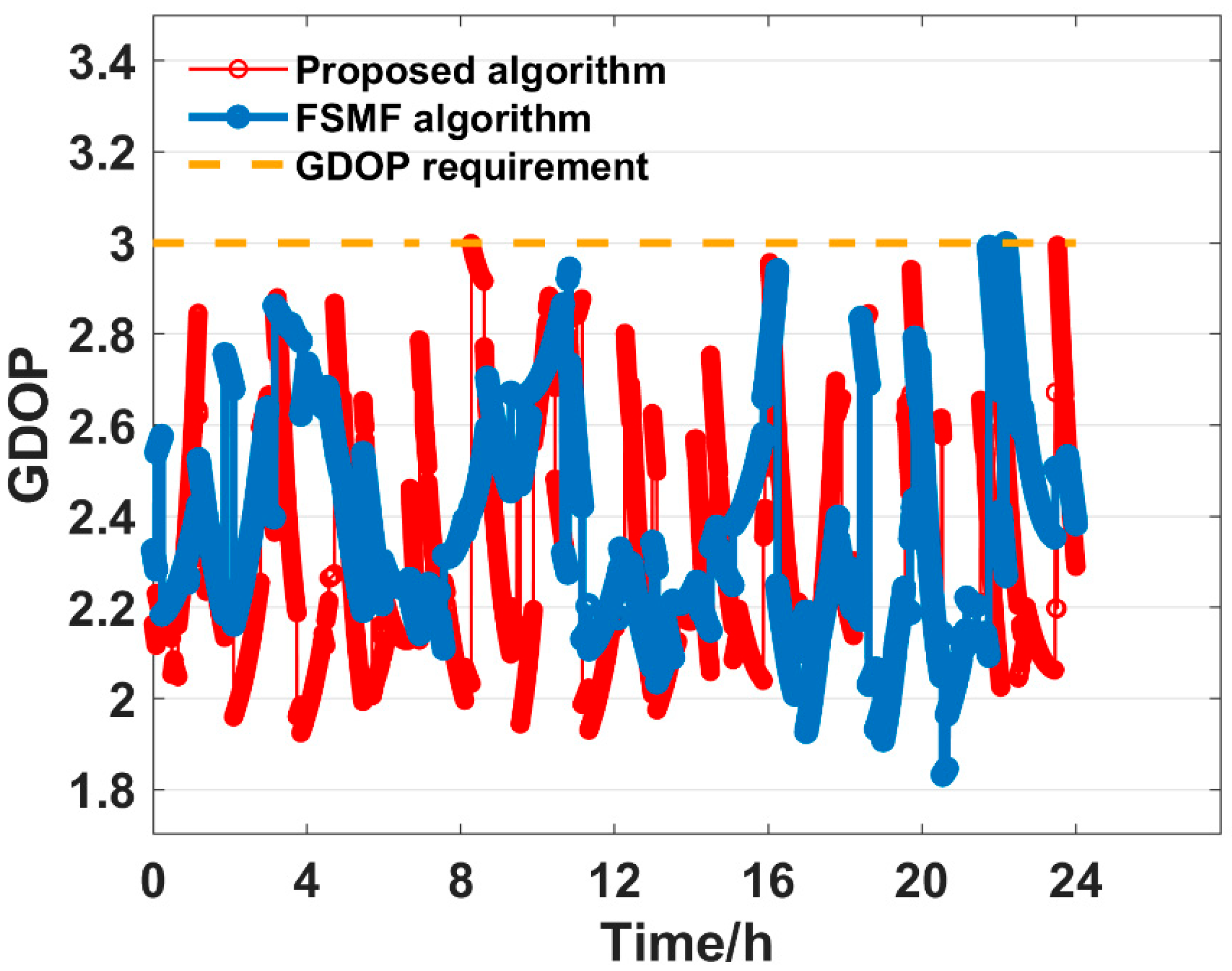
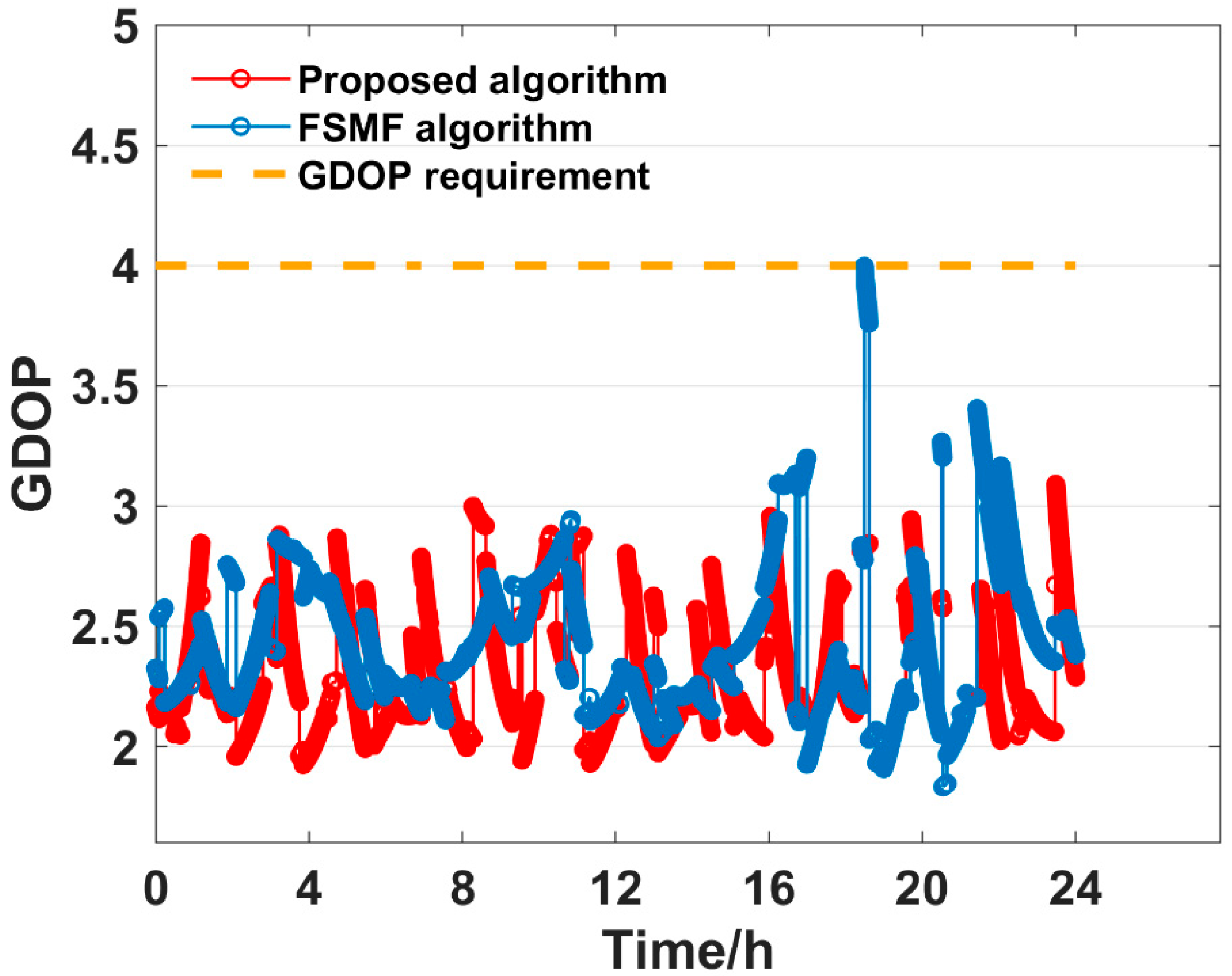
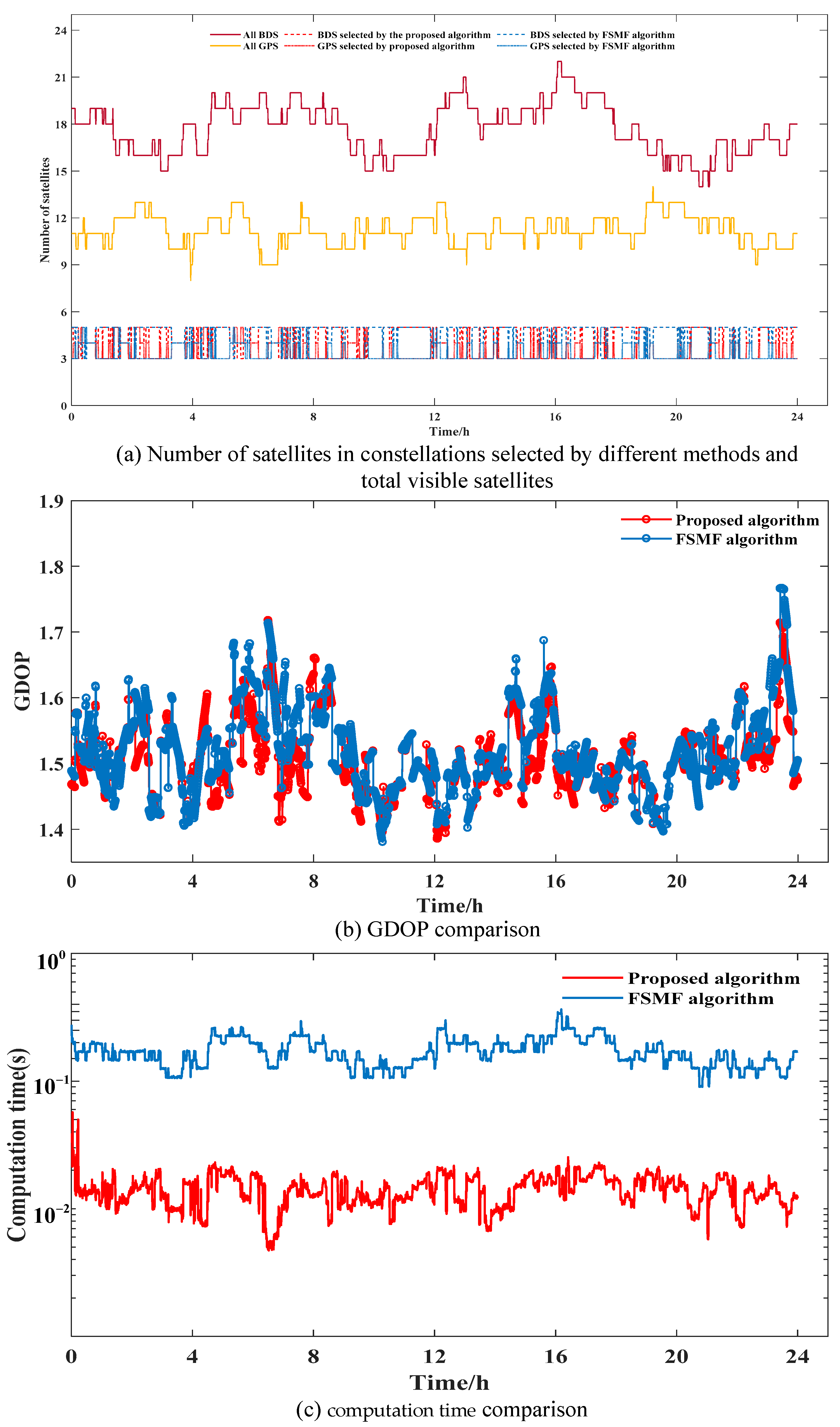
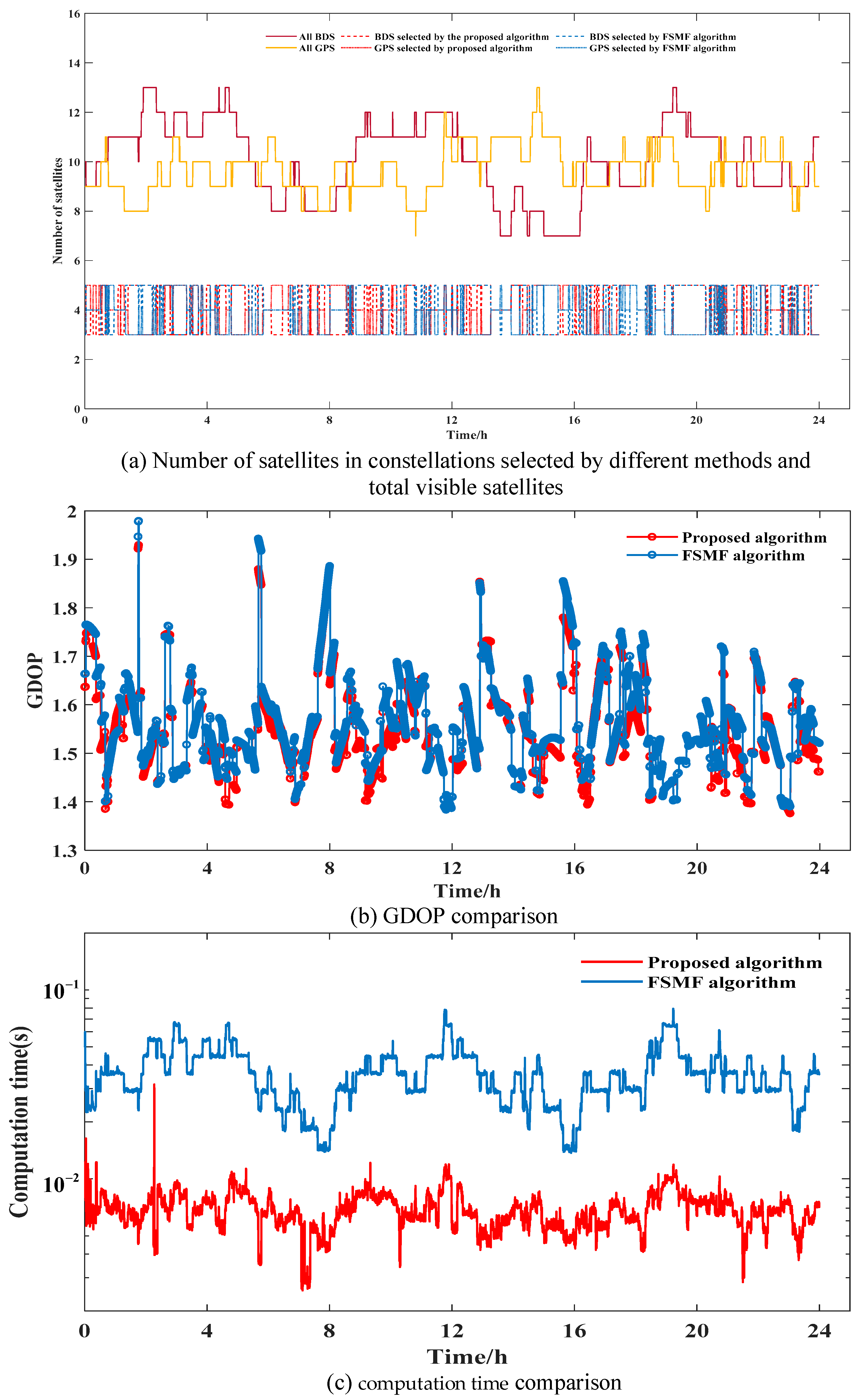
We propose a fast satellite selection method based on hierarchical clustering and iterative optimization. In experiments with fixed satellite subset sizes, results show that the proposed method outperforms the FSMF algorithm in both GDOP performance and satellite selection efficiency. In experiments with different required GDOP thresholds, the proposed algorithm can construct a comparatively smaller subset of satellites to satisfy the different accuracy thresholds with more stable selection results than that of FSMF algorithm. To further validate the effectiveness of the algorithm, experiments were conducted using real-world satellite data provided by IGS from three different stations (ABMF, URUM, and DUMG). The results show that when selecting eight satellites, for the DUMG and URUM stations, the GDOP differences between the proposed method and FSMF are very small, with average differences of 0.0136 and 0.0174, respectively. Accordingly, the proposed method reduces the computation time by about 91.4% and 81.0% compared to the FSMF method. For the ABMF station, the optimal method required more computation time compared to both the proposed and FSMF methods. Therefore, the proposed algorithm can more swiftly and efficiently select an optimal satellite subset to meet positioning accuracy requirements than the other algorithms examined, reducing computational complexity and enhancing real-time performance.


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}