
Research on the Tunable Optical Alignment Technology of Lidar Under Complex Working Conditions



Abstract
1. Introduction
2. Methodology
2.1. Lidar System Optical Path
2.2. Traditional Optical Alignment Method
2.3. Adjustable Optical Alignment Method
3. Experiment
3.1. RRDWL System Overview
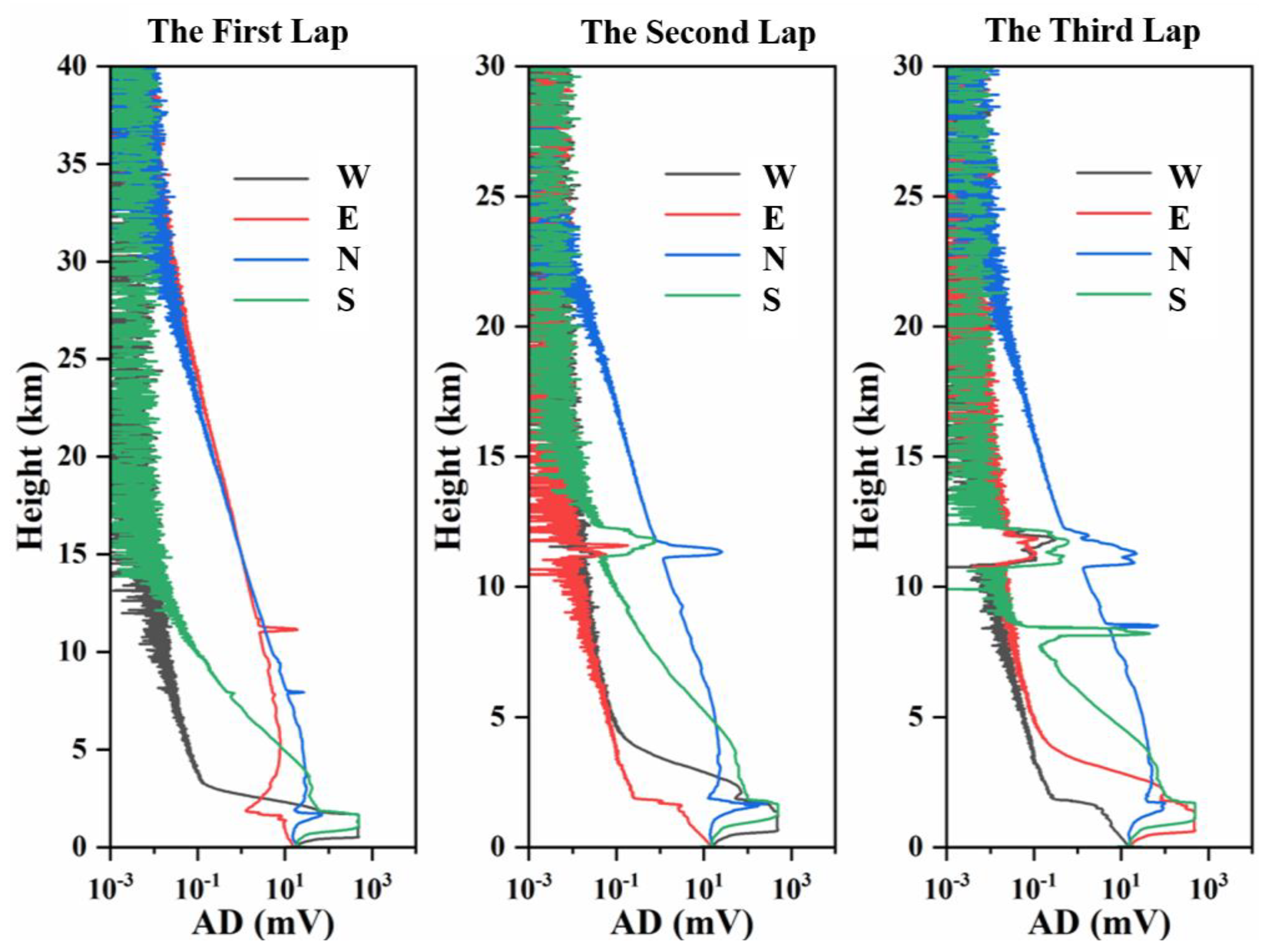
3.2. RRDWL Optical Path Imbalance
3.3. RRDWL Optical Alignment Test
- (1)
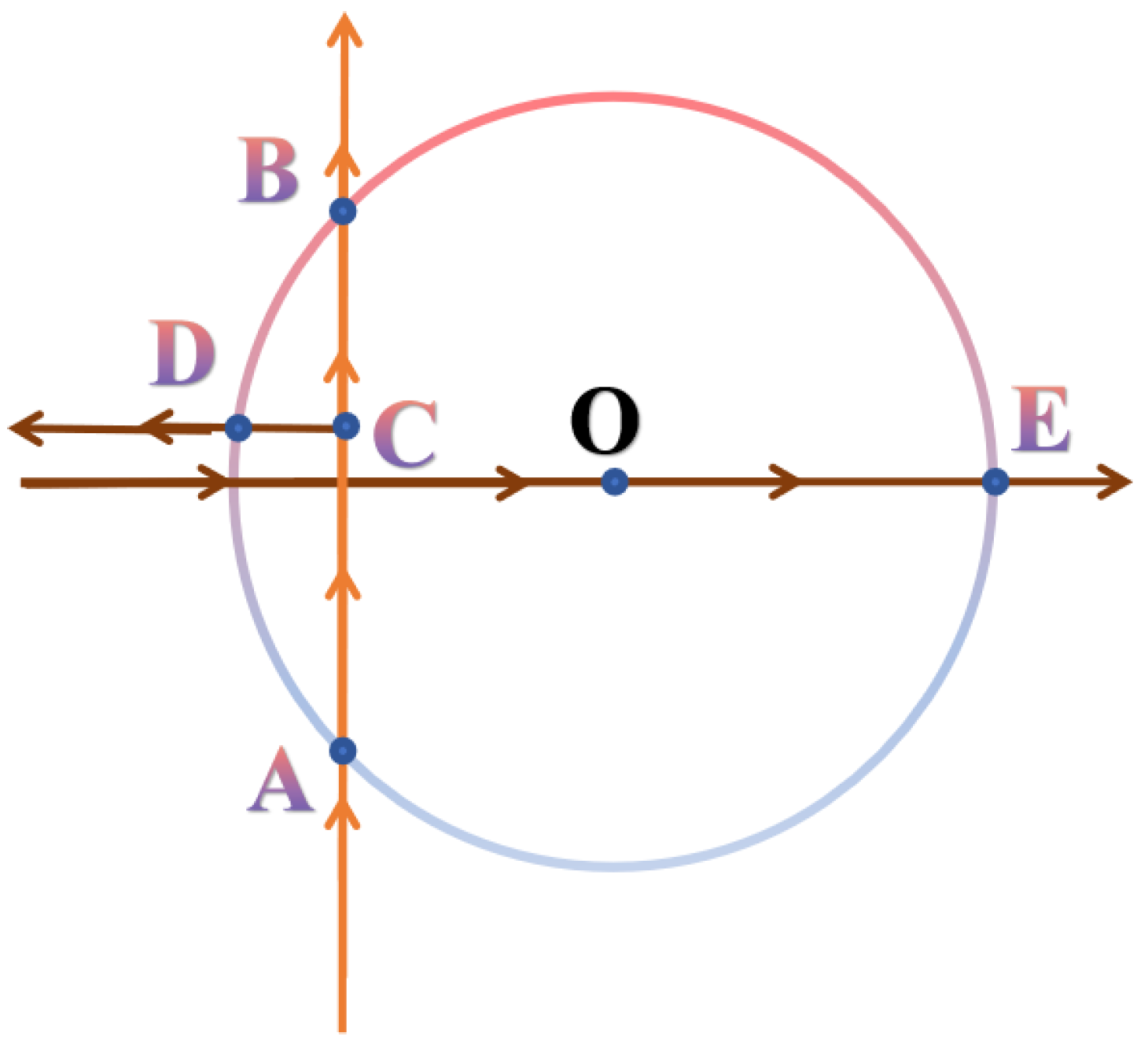
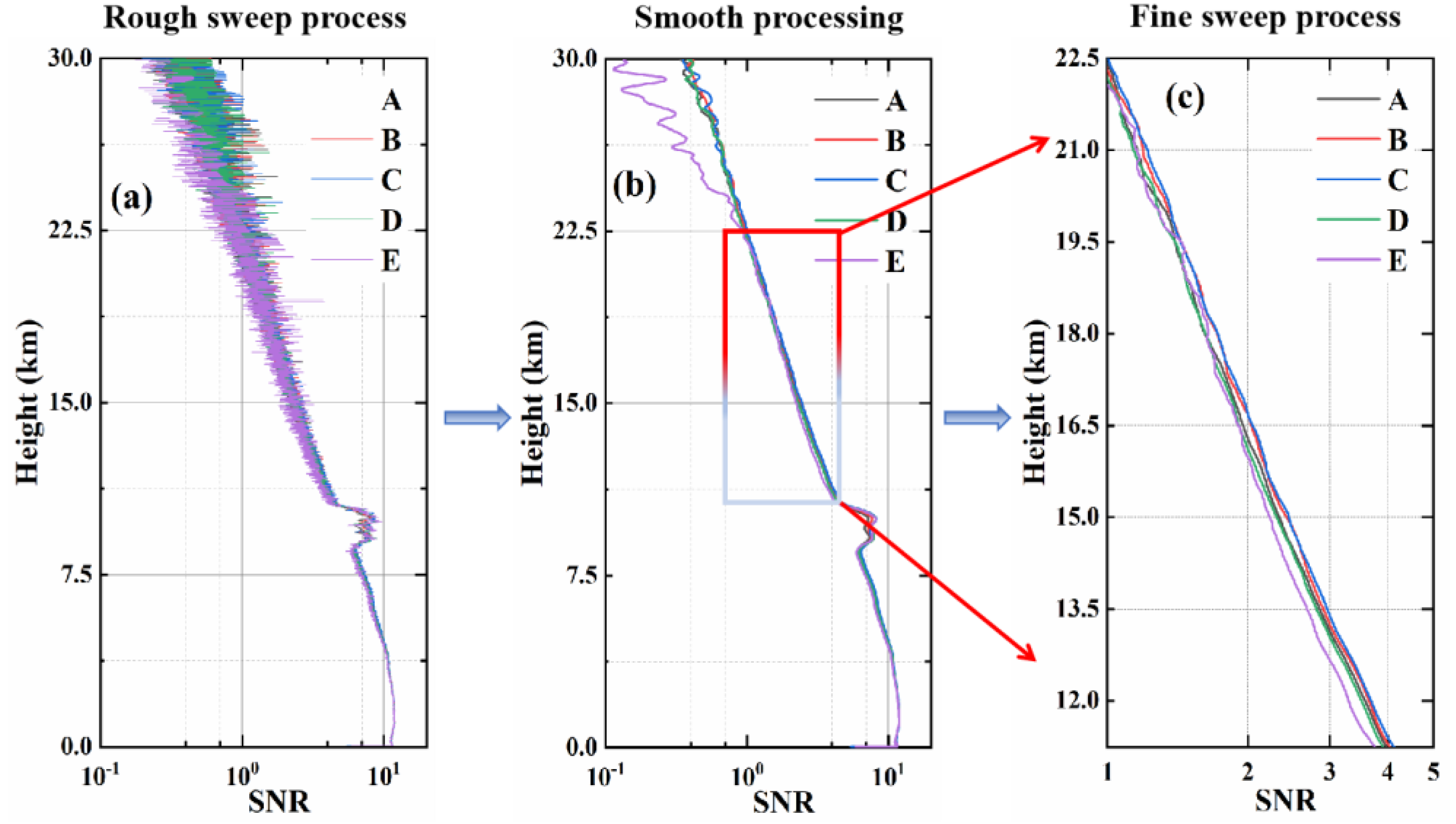
- First, if atmospheric echo signal misalignment occurs in the direction of the four lines of sight after one full rotation of the rotating platform, broad-spectrum dimming (coarse adjustment) should be performed. The adjustment step for the high-precision two-dimensional electric adjustment frame is set to 300, and the initial adjustment position is designated as S0. Moving 300 steps in a specified direction yields data S1. If S0 < S1, 300 steps are moved in the opposite direction, and the resulting data are S2. If S0 < S2, return to position S0.
- (2)
- Second, after completing the coarse adjustment, the optical axis position at this stage is recognized as being within the field of view of the receiving telescope. The optimal position after the coarse adjustment is adopted as the initial position, and four datasets are acquired in both left and right directions, each with a step length of 100, for the second rough adjustment to determine the position S3 of the most favorable group.
- (3)
- Finally, fine adjustment is performed at the position identified by S3 as the primary collimation of the optical axis. Four datasets are obtained from both left and right directions, each with a step length of 20, for fine adjustment, yielding position S4 as the optimal position. Ultimately, S4 represents the most suitable collimation position.
4. Results
4.1. RRDWL Optical Alignment Results
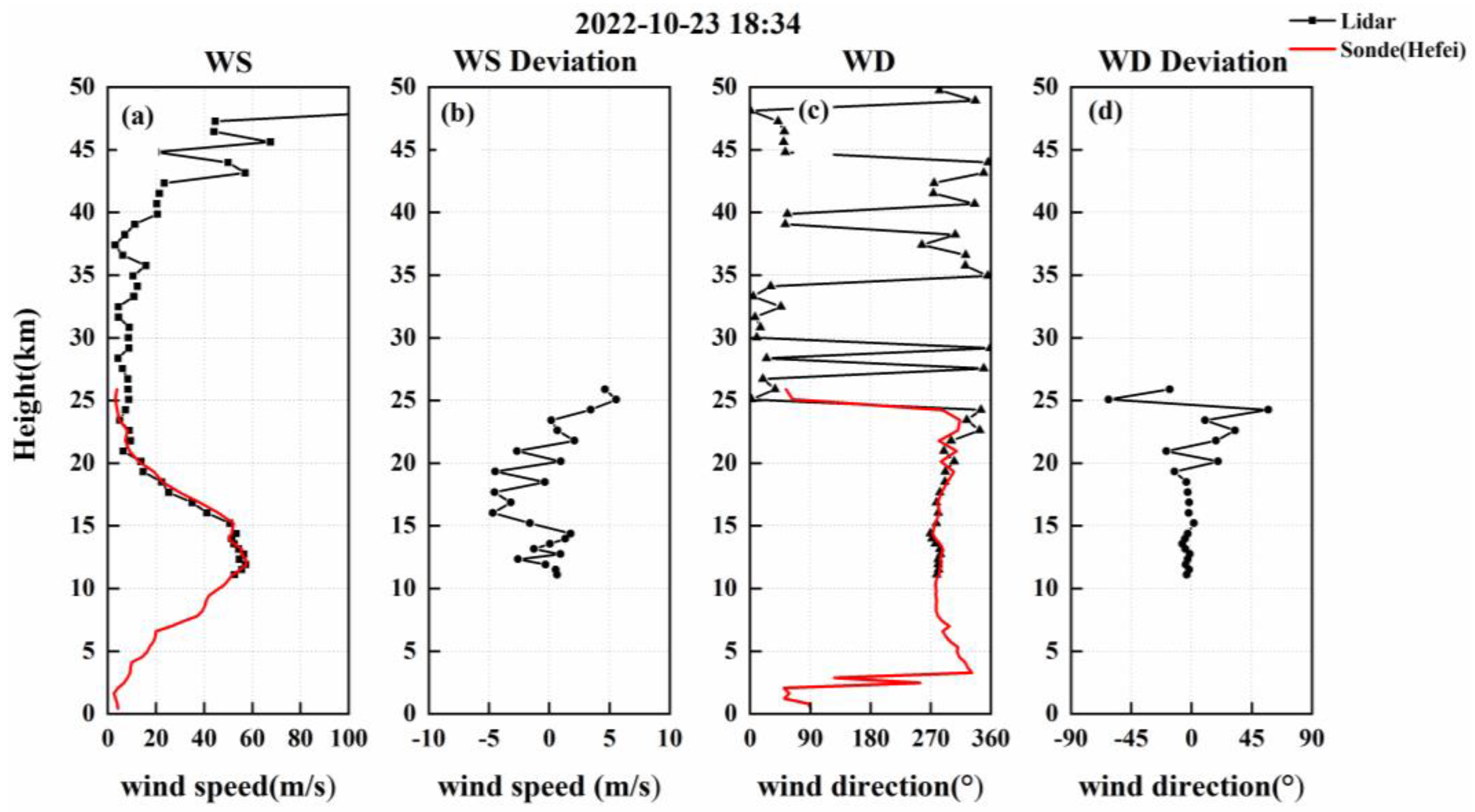
4.2. Atmospheric Horizontal Wind Field Results
4.3. RRDWL Performance Optimization Evaluation
5. Discussion
- (1)
- Laser frequency stability. In RRDWL operations, seed injection lasers are commonly used. However, these lasers are highly sensitive to external factors such as temperature fluctuations and vibrations, which can cause frequency drift. This instability may introduce significant errors in subsequent wind speed inversion, severely affecting the accuracy of wind speed measurements and analysis;
- (2)
- Divergence angle and stability of the laser beam. During detection, the emitted laser beam may jitter or exhibit an amplification effect. This phenomenon hampers the accurate identification of Doppler frequency shifts caused by wind, which in turn increases the errors in wind speed inversion and hinders the accurate acquisition of wind speed data;
- (3)
- Instrument stability and calibration issues. The direct detection wind Lidar system often consists of multiple high-precision instruments. In real-world conditions, environmental factors such as temperature changes and vibrations can induce system errors in these instruments. Furthermore, the stability of the instruments and calibration processes may negatively impact the overall detection performance;
- (4)
- Complex atmospheric conditions. Most direct detection wind Lidar systems are currently deployed in high-latitude regions or areas with favorable meteorological conditions. However, atmospheric conditions in central and eastern China, as well as low-latitude areas, are highly complex, with significant spatiotemporal inhomogeneity. In such an environment, factors like clouds, aerosols, and turbulence are intertwined, directly affecting wind Lidar performance and interfering with the accuracy of detection results.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, Z.; Barlow, J.F.; Chan, P.-W.; Fung, J.C.H.; Li, Y.; Ren, C.; Mak, H.W.L.; Ng, E. A Review of Progress and Applications of Pulsed Doppler Wind LiDARs. Remote Sens. 2019, 11, 2522. [Google Scholar] [CrossRef]
- Jinlong, Y.; Haiyun, X.; Tianwen, W.; Lu, W.; Bin, Y.; Yunbin, W. Identifying cloud, precipitation, windshear, and turbulence by deep analysis of the power spectrum of coherent Doppler wind lidar. Opt. Express 2020, 28, 37406–37418. [Google Scholar]
- Wang, Z.; Liu, Z.; Liu, L.; Wu, S.; Liu, B.; Li, Z.; Chu, X. Iodine-filter-based mobile Doppler Lidar to make continuous and full-azimuth-scanned wind measurements: Data acquisition and analysis system, data retrieval methods, and error analysis. Appl. Opt. 2010, 49, 6960–6978. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Li, J. Performance analysis of dual-frequency lidar in the detection of the complex wind field. Opt. Express 2021, 29, 23524–23539. [Google Scholar] [CrossRef] [PubMed]
- Dou, X.; Han, Y.; Sun, D.; Xia, H.; Shu, Z.; Zhao, R.; Shangguan, M.; Guo, J. Mobile Rayleigh Doppler Lidar for wind and temperature measurements in the stratosphere and lower mesosphere. Opt. Express 2014, 22, A1203–A1221. [Google Scholar] [CrossRef]
- Hao, R.; Dou, X.; Xue, X.; Sun, D.; Han, Y.; Chen, C.; Zheng, J.; Li, Z.; Zhou, A.; Han, Y.; et al. Stratosphere and lower mesosphere wind observation and gravity wave activities of the wind field in China using a mobile Rayleigh Doppler Lidar. J. Geophys. Res. Space Phys. 2017, 122, 8847–8857. [Google Scholar]
- Wu, S.; Liu, B.; Liu, J.; Zhai, X.; Feng, C.; Wang, G.; Zhang, H.; Yin, J.; Wang, X.; Li, R.; et al. Wind turbine wake visualization and characteristics analysis by Doppler lidar. Opt. Express 2016, 24, A762–A780. [Google Scholar] [CrossRef]
- Liu, Q.; Zhu, W.; Jin, X.; Qing, C. Real-Time Synchronous Acquisition and Processing of Signal in Coherent Doppler Wind Lidar Using FPGA. Remote Sens. 2023, 15, 5673. [Google Scholar] [CrossRef]
- Yu, C.; Shangguan, M.; Xia, H.; Zhang, J.; Dou, X.; Pan, J.W. Fully integrated free-running InGaAs/InP single-photon detector for accurate lidar applications. Opt. Express. 2017, 25, 14611–14620. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, X.; Feng, Z.; Chen, J.; Zhou, X.; Luo, J.; Sun, J.; Zhao, Y. Enhanced Wind-Field Detection Using an Adaptive Noise-Reduction Peak-Retrieval (ANRPR) Algorithm for Coherent Doppler Lidar. Atmosphere 2024, 15, 7. [Google Scholar] [CrossRef]
- Ma, B.; Zong, Y.; Li, Z.; Li, Q.; Zhang, D.; Li, Y. Status and prospect of opto-mechanical integration analysis of micro-vibration in aerospace optical cameras. Opt. Precis. Eng. 2023, 31, 822–838. [Google Scholar] [CrossRef]
- Tavakolibasti, M.; Meszmer, P.; Böttger, G.; Kettelgerdes, M.; Elger, G.; Erdogan, H.; Seshaditya, A.; Wunderle, B. Thermamechanical-optical coupling within a digital twin development for automotive LiDAR. Microelectron. Reliab. 2023, 141, 114871. [Google Scholar] [CrossRef]
- Philip Stahl, H.; Kuan, G.; Arnold, W.R.; Brooks, T.; Brent Knight, J.; Martin, S. Habitable-Zone Exoplanet Observatory baseline 4-m telescope: Systems-engineering design process and predicted structural thermal optical performance. J. Astron. Telesc. Instrum. Syst. 2020, 6, 034004. [Google Scholar] [CrossRef]
- Xiao, Y.; Xu, W.; Zhao, C. Integrated Simulation of Opto-Mechanical System. Acta Opt. Sin. 2016, 36, 0722002. [Google Scholar] [CrossRef]
- Liu, G.; Guo, L.; Liu, C.; Wu, Q. Evaluation of different calibration equations for NTC thermistor applied to high-precision temperature measurement. Measurement 2018, 120, 21–27. [Google Scholar] [CrossRef]
- Fiorani, L.; Armenante, M.; Capobianco, R. Self-aligning lidar for the continuous monitoring of the atmosphere. Appl. Opt. 1998, 37, 4758–4764. [Google Scholar] [CrossRef]
- Liu, B.; Fan, Y.; Chang, M.Y. Methods for optical adjustment in lidar systems. Appl. Opt. 2005, 44, 1480–1484. [Google Scholar] [CrossRef] [PubMed]
- Seckar, C.; Guy, L.; DiFronzo, A.; Weimer, C. Performance testing of an Active Boresight Mechanism for use in the CALIPSO space bourne LIDAR mission. Proc. SPIE 2005, 58770X, 1–12. [Google Scholar]
- Kun, T.; Shisheng, S. A self-alignment system of a mobile lidar. J. Atmos. Environ. Opt. 2008, 3, 344–348. [Google Scholar]
- Liu, X.; Wu, Y.; Hu, S.; Wang, J.; Wong, N. Design and implementation of automatic alignment system for the Lidar. Chin. J. Lasers 2009, 36, 2341–2345. [Google Scholar]
- Xin, F. Study on Self-Aligning Lidar and Data Real-Time Processing Technology. Master’s Thesis, Anhui Institute Optics and Fine Mechanics, Hefei, Anhui, 2009. [Google Scholar]
- Wei, L. Self-Aligning Technology of Sodium Lidar for the Measurements of Temperature and Wind Lidar and Study of Gravity Wave in Stratosphere. Master’s Thesis, University of Science and Technology of China, Hefei, Anhui, 2012. [Google Scholar]
- Zhao, M.; Xie, C.; Wang, B.; Xing, K.; Chen, J.; Fang, Z.; Li, L.; Cheng, L. A Rotary Platform Mounted Doppler Lidar for Wind Measurements in Upper Troposphere and Stratosphere. Remote Sens. 2022, 14, 5556. [Google Scholar] [CrossRef]
- Chen, J.; Xie, C.; Zhao, M.; Ji, J.; Wang, B.; Xing, K. Research on the Performance of an Active Rotating Tropospheric and Stratospheric Doppler Wind Lidar Transmitter and Receiver. Remote Sens. 2023, 15, 952. [Google Scholar] [CrossRef]
- Chen, J.; Xie, C.; Ji, J.; Li, L.; Wang, B.; Xing, K.; Zhao, M. Performance Evaluation and Error Tracing of Rotary Rayleigh Doppler Wind LiDAR. Photonics 2024, 11, 398. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement Performance | |
|---|---|
| Height resolution | 0.275–1.1 km (changeable) |
| Time resolution | 30 min (changeable) |
| Laser wavelength | 532.1 nm |
| Pulse energy | 350 mJ |
| Repetition rate | 30 Hz |
| Spectral bandwidth (FWHM) | 70 MHz |
| Divergence angle | 50 μrad |
| Telescope diameter | 800 mm |
| FOV | 100 μrad |
| IF bandwidth (FWHM) | 0.3 nm |
| Beam divergence | 2.5 mrad |
| Transient recorder | 12 bit, 20 MHz sampling rate |
| Acquisition card | 12 bit, 1 GHz sampling rate |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Ji, J.; Xie, C.; Wang, Y. Research on the Tunable Optical Alignment Technology of Lidar Under Complex Working Conditions. Remote Sens. 2025, 17, 532. https://doi.org/10.3390/rs17030532
Chen J, Ji J, Xie C, Wang Y. Research on the Tunable Optical Alignment Technology of Lidar Under Complex Working Conditions. Remote Sensing. 2025; 17(3):532. https://doi.org/10.3390/rs17030532
Chicago/Turabian StyleChen, Jianfeng, Jie Ji, Chenbo Xie, and Yingjian Wang. 2025. "Research on the Tunable Optical Alignment Technology of Lidar Under Complex Working Conditions" Remote Sensing 17, no. 3: 532. https://doi.org/10.3390/rs17030532
APA StyleChen, J., Ji, J., Xie, C., & Wang, Y. (2025). Research on the Tunable Optical Alignment Technology of Lidar Under Complex Working Conditions. Remote Sensing, 17(3), 532. https://doi.org/10.3390/rs17030532