
Estimating Subsurface Geostatistical Properties from GPR Reflection Data Using a Supervised Deep Learning Approach


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methodology
2.1. Geostatistical Background
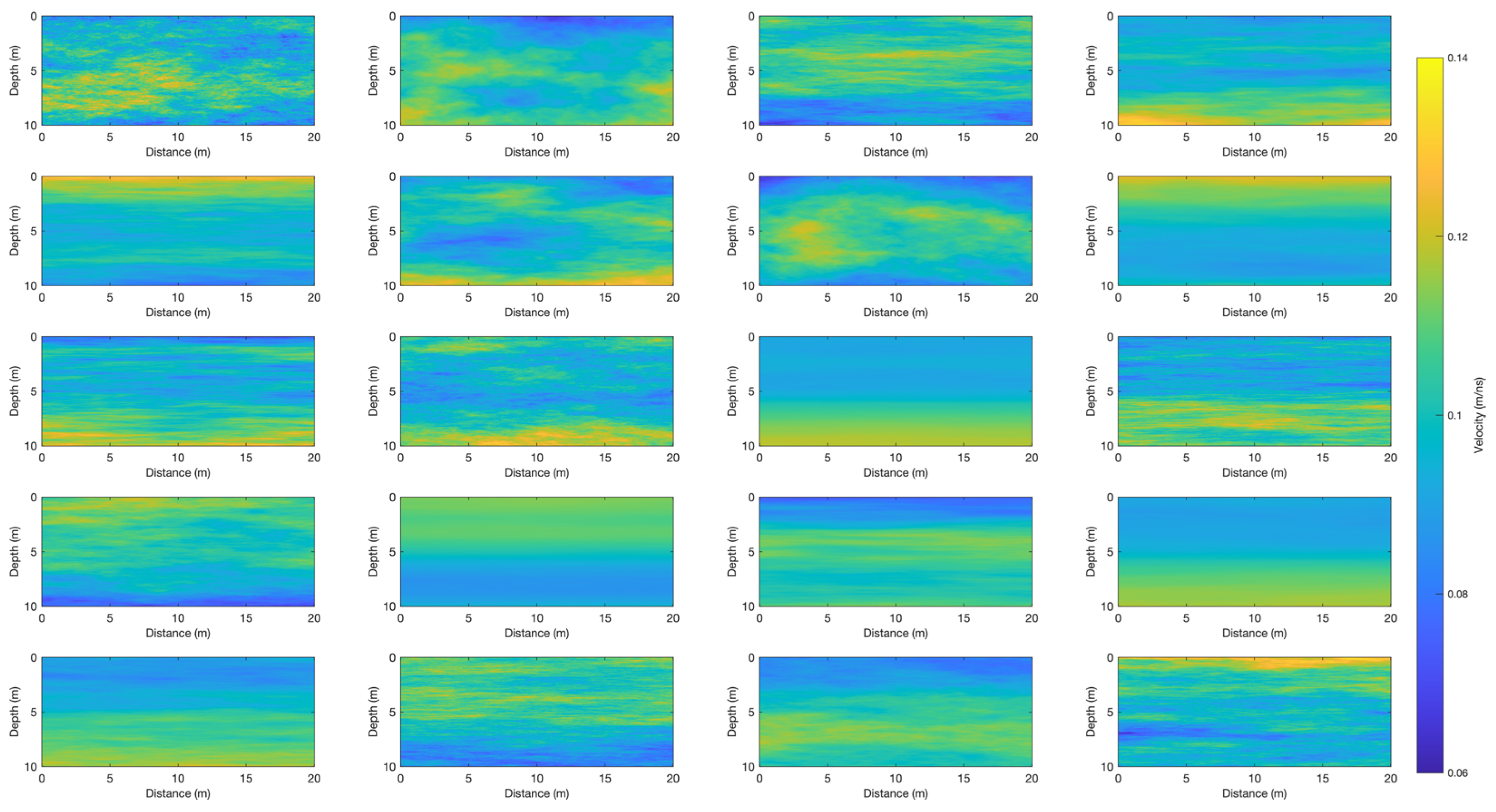
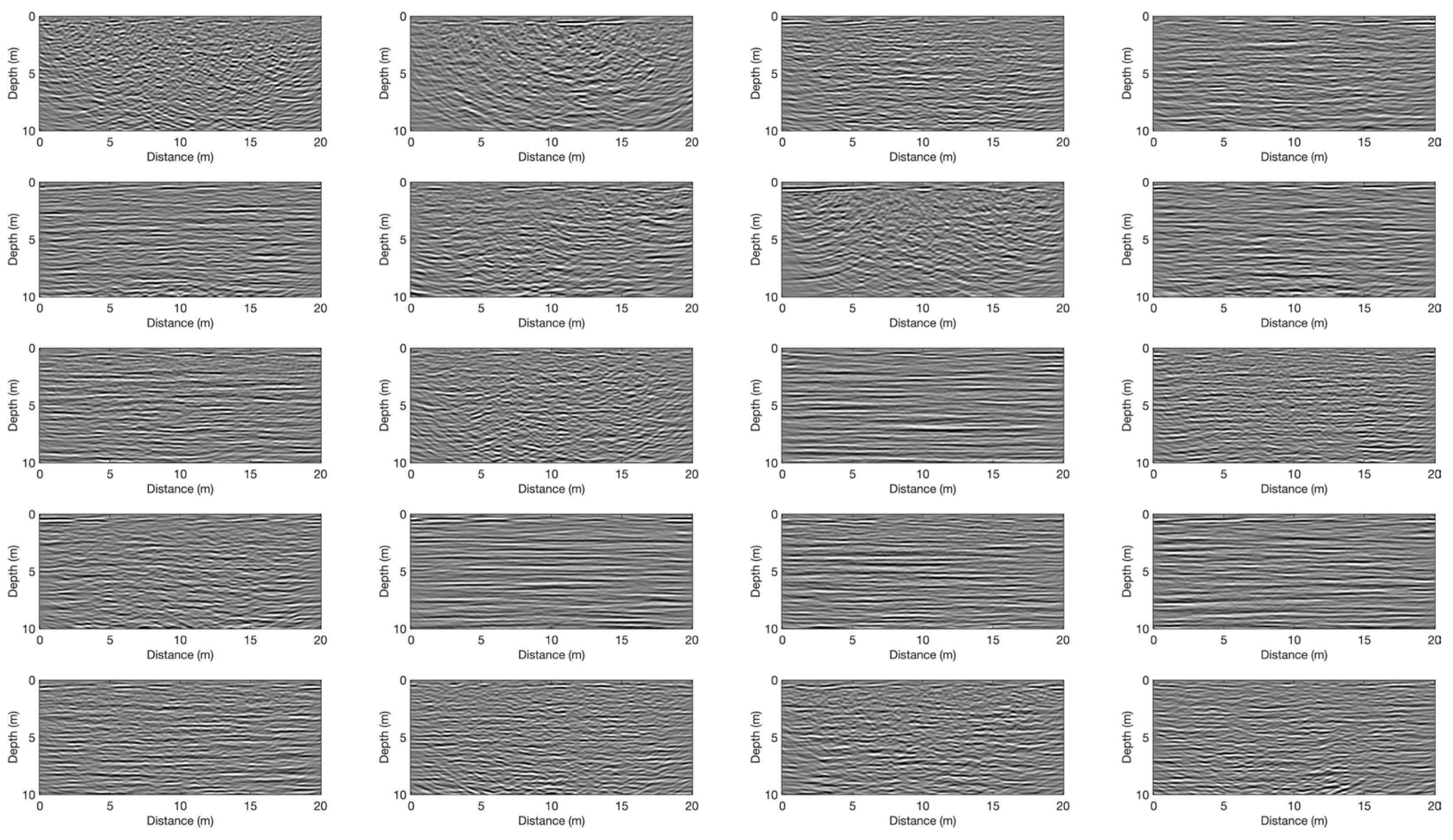
2.2. Generation of Training Database
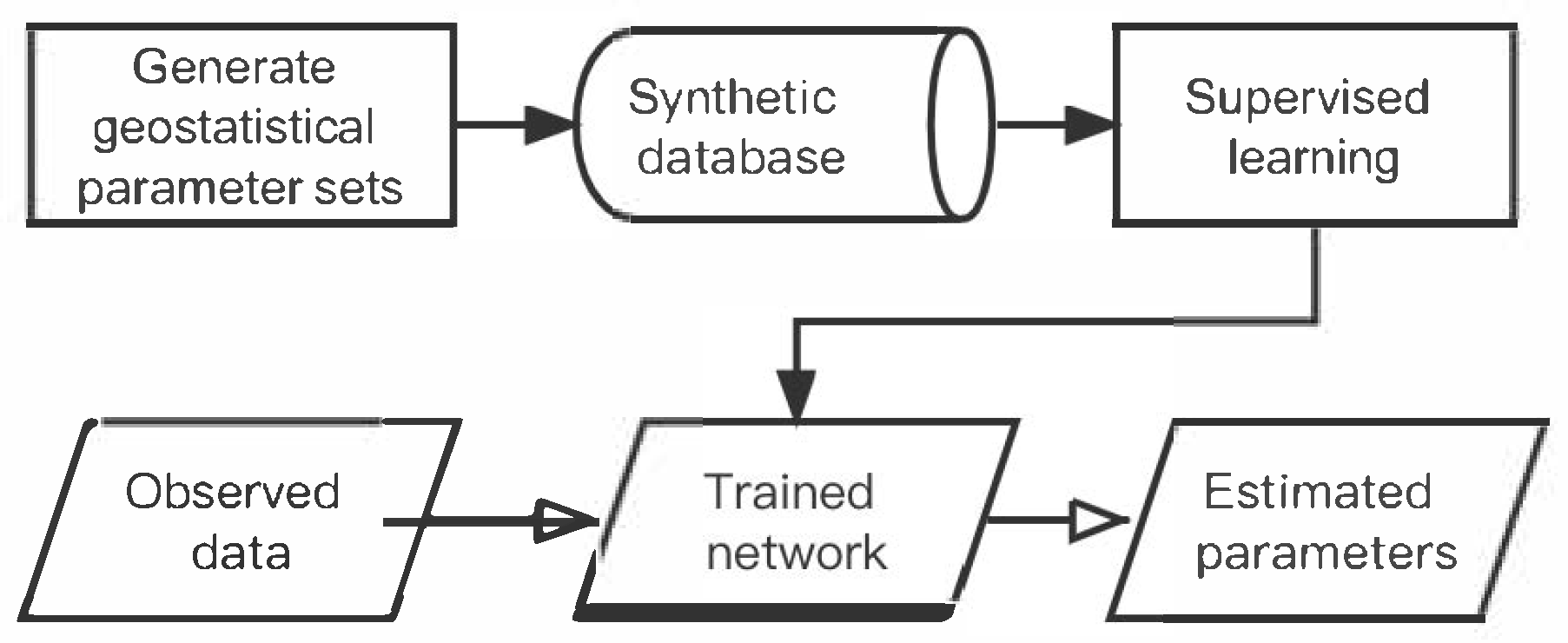
2.3. Supervised Learning
3. Results
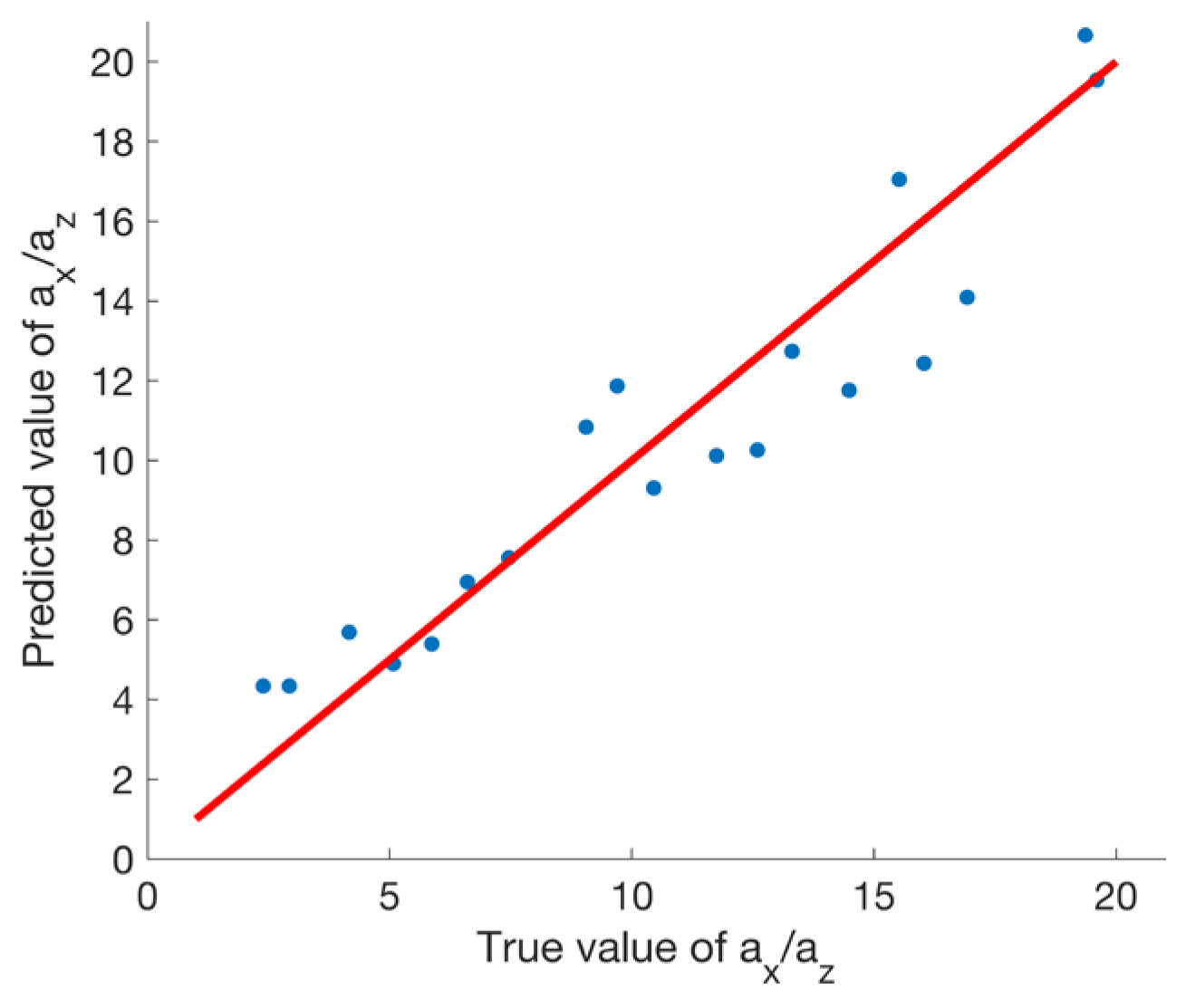
3.1. FDTD-Based Synthetic Data
3.2. Sensitivity to Noise
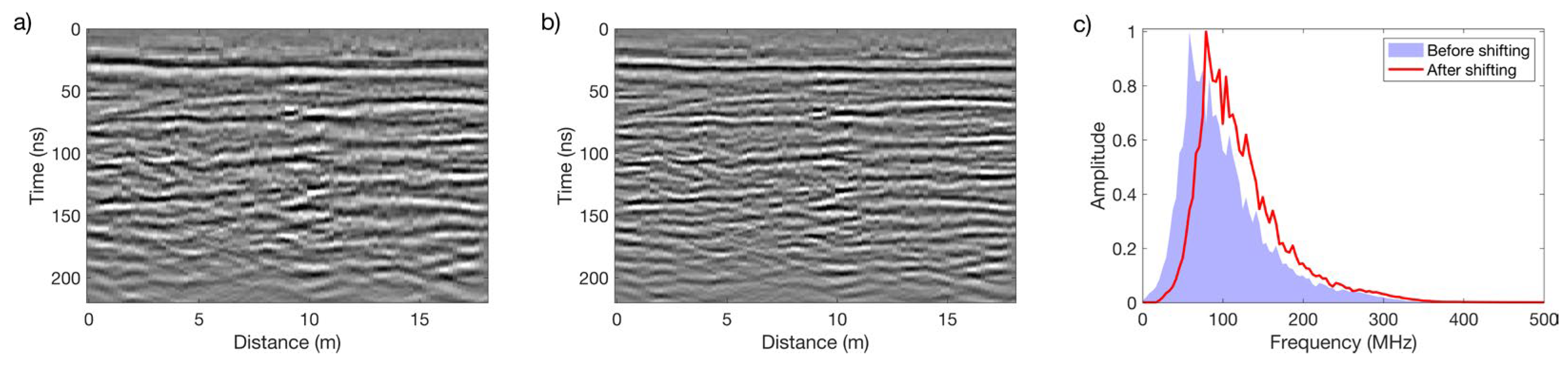
3.3. Differences in Spectral Characteristics of Analyzed Data and Training Database
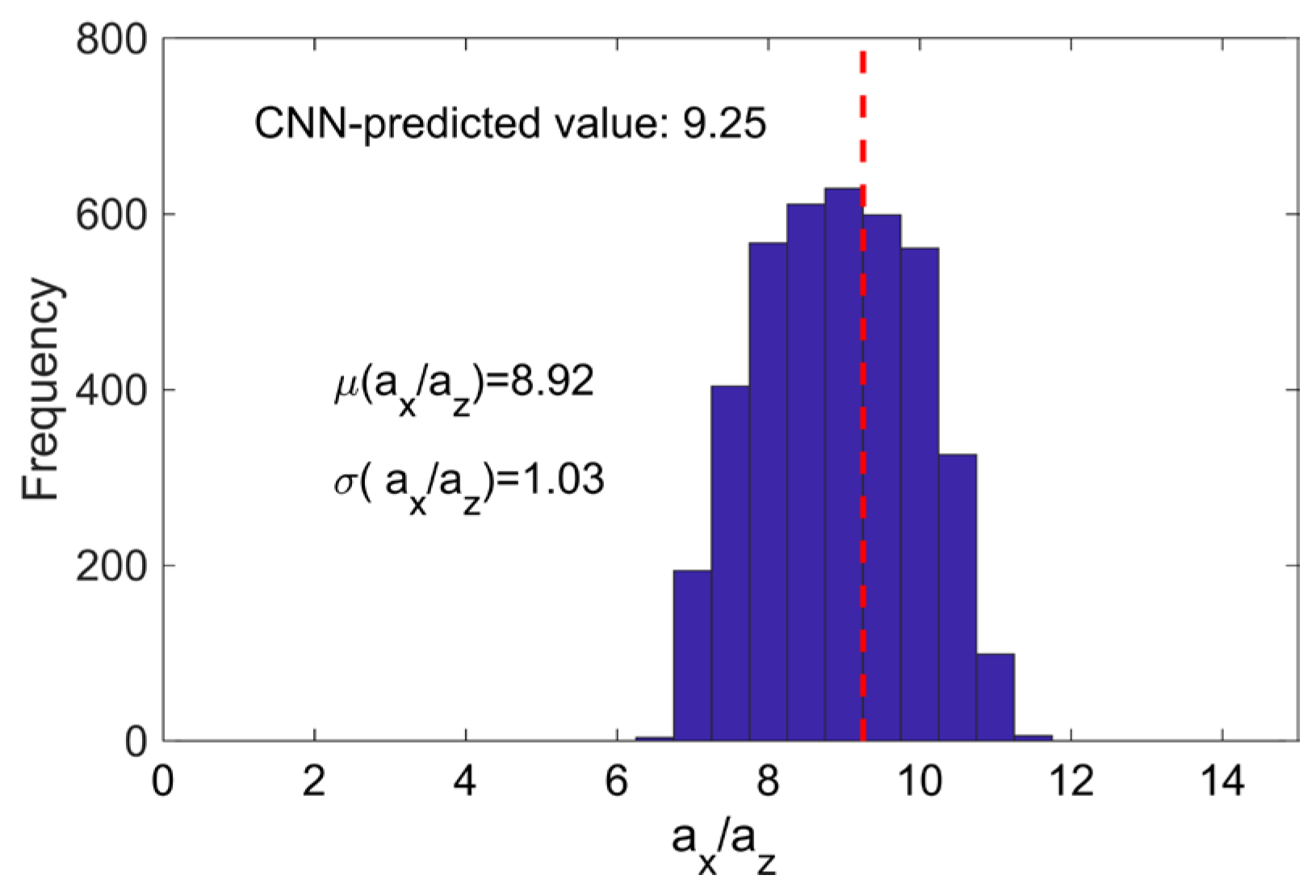
3.4. Application to Field Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rea, J.; Knight, R. Geostatistical analysis of ground-penetrating radar data: A means of describing spatial variation in the subsurface. Water Resour. Res. 1998, 34, 329–339. [Google Scholar] [CrossRef]
- Dafflon, B.; Tronicke, J.; Holliger, K. Inferring the lateral subsurface correlation structure from georadar data: Methodological background and experimental evidence. In Geostatistics for Environmental Applications; Springer: Berlin/Heidelberg, Germany, 2005; pp. 467–478. [Google Scholar]
- Knight, R.J.; Irving, J.D.; Tercier, P.; Freeman, G.J.; Murray, C.J.; Rockhold, M.L. A comparison of the use of radar images and neutron probe data to determine the horizontal correlation length of water content. Subsurf. Hydrol. Data Integr. Prop. Process. 2007, 171, 31–44. [Google Scholar]
- Knight, R.; Tercier, P.; Irving, J. The effect of vertical measurement resolution on the correlation structure of a ground penetrating radar reflection image. Geophys. Res. Lett. 2004, 31, 2–5. [Google Scholar] [CrossRef]
- Oldenborger, G.A.; Knoll, M.D.; Barrash, W. Effects of signal processing and antenna frequency on the geostatistical structure of ground-penetrating radar data. J. Environ. Eng. Geophys. 2004, 9, 201–212. [Google Scholar] [CrossRef]
- Irving, J.; Knight, R.; Holliger, K. Estimation of the lateral correlation structure of subsurface water content from surface-based ground-penetrating radar reflection images. Water Resour. Res. 2009, 45, W12404. [Google Scholar] [CrossRef]
- Irving, J.; Holliger, K. Geostatistical inversion of seismic and ground-penetrating radar reflection images: What can we actually resolve? Geophys. Res. Lett. 2010, 37, L21306. [Google Scholar] [CrossRef]
- Xu, Z.; Irving, J.; Lindsay, K.; Bradford, J.; Zhu, P.; Holliger, K. Estimation of the 3D correlation structure of an alluvial aquifer from surface-based multi-frequency ground-penetrating radar reflection data. Geophys. Prospect. 2020, 68, 678–689. [Google Scholar] [CrossRef]
- Xu, Z.; Irving, J.; Liu, Y.; Zhu, P.; Holliger, K. Conditional stochastic inversion of common-offset ground-penetrating radar reflection data. Geophysics 2021, 86, WB89–WB99. [Google Scholar] [CrossRef]
- Scholer, M.; Irving, J.; Holliger, K. Estimation of the correlation structure of crustal velocity heterogeneity from seismic reflection data. Geophys. J. Int. 2010, 183, 1408–1428. [Google Scholar] [CrossRef]
- Liu, Y.; Greenwood, A.; Hetényi, G.; Baron, L.; Holliger, K. High-resolution seismic reflection survey crossing the Insubric Line into the Ivrea-Verbano Zone: Novel approaches for interpreting the seismic response of steeply dipping structures. Tectonophysics 2021, 816, 229035. [Google Scholar] [CrossRef]
- Dafflon, B.; Irving, J.; Holliger, K. Use of high-resolution geophysical data to characterize heterogeneous aquifers: Influence of data integration method on hydrological predictions. Water Resour. Res. 2009, 45, W09413. [Google Scholar] [CrossRef]
- Liu, Y.; Irving, J.; Holliger, K. High-resolution velocity estimation from surface-based common-offset GPR reflection data. Geophys. J. Int. 2022, 230, 131–144. [Google Scholar] [CrossRef]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Dramsch, J.S. 70 years of machine learning in geoscience in review. Adv. Geophys. 2020, 61, 1–55. [Google Scholar]
- Yu, S.; Ma, J. Deep learning for geophysics: Current and future trends. Rev. Geophys. 2021, 59, e2021RG000742. [Google Scholar] [CrossRef]
- Mousavi, S.M.; Beroza, G.C. Deep-learning seismology. Science 2022, 377, eabm4470. [Google Scholar] [CrossRef]
- Zhu, W.; Mousavi, S.M.; Beroza, G.C. Seismic signal denoising and decomposition using deep neural networks. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9476–9488. [Google Scholar] [CrossRef]
- Kaur, H.; Pham, N.; Fomel, S. Improving the resolution of migrated images by approximating the inverse Hessian using deep learning. Geophysics 2020, 85, WA173–WA183. [Google Scholar] [CrossRef]
- Yang, L.; Chen, W.; Wang, H.; Chen, Y. Deep learning seismic random noise attenuation via improved residual convolutional neural network. IEEE Trans. Geosci. Remote Sens. 2021, 59, 7968–7981. [Google Scholar] [CrossRef]
- Wu, X.; Liang, L.; Shi, Y.; Fomel, S. FaultSeg3D: Using synthetic data sets to train an end-to-end convolutional neural network for 3D seismic fault segmentation. Geophysics 2019, 84, IM35–IM45. [Google Scholar] [CrossRef]
- Song, S.; Mukerji, T.; Hou, J. Bridging the Gap between Geophysics and Geology with Generative Adversarial Networks. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5902411. [Google Scholar] [CrossRef]
- Yang, F.; Ma, J. Deep-learning inversion: A next-generation seismic velocity model building method. Geophysics 2019, 84, R583–R599. [Google Scholar] [CrossRef]
- Di, H.; Abubakar, A. Estimating subsurface properties using a semi-supervised neural networks approach. Geophysics 2021, 87, IM1–IM10. [Google Scholar] [CrossRef]
- Geng, Z.; Zhao, Z.; Shi, Y.; Wu, X.; Fomel, S.; Sen, M. Deep learning for velocity model building with common-image gather volumes. Geophys. J. Int. 2022, 228, 1054–1070. [Google Scholar] [CrossRef]
- Schmelzbach, C.; Tronicke, J.; Dietrich, P. High-resolution water content estimation from surface-based ground-penetrating radar reflection data by impedance inversion. Water Resour. Res. 2012, 48, W08505. [Google Scholar] [CrossRef]
- Pullammanappallil, S.; Levander, A.; Larkin, S.P. Estimation of crustal stochastic parameters from seismic exploration data. J. Geophys. Res. Solid Earth 1997, 102, 15269–15286. [Google Scholar] [CrossRef]
- Poppeliers, C. Estimating vertical stochastic scale parameters from seismic reflection data: Deconvolution with non-white reflectivity. Geophys. J. Int. 2007, 168, 769–778. [Google Scholar] [CrossRef]
- Goff, J.A.; Jordan, T.H. Stochastic modeling of seafloor morphology: Inversion of sea beam data for second-order statistics. J. Geophys. Res. Solid Earth 1988, 93, 13589–13608. [Google Scholar] [CrossRef]
- Tronicke, J.; Holliger, K. Quantitative integration of hydrogeophysical data: Conditional geostatistical simulation for characterizing heterogeneous alluvial aquifers. Geophysics 2005, 70, H1–H10. [Google Scholar] [CrossRef]
- Holliger, K.; Levander, A.R.; Goff, J.A. Stochastic modeling of the reflective lower crust: Petrophysical and geological evidence from the Ivera Zone (northern Italy). J. Geophys. Res. Solid Earth 1993, 98, 11967–11980. [Google Scholar] [CrossRef]
- Tronicke, J.; Holliger, K.; Barrash, W.; Knoll, M.D. Multivariate analysis of cross-hole georadar velocity and attenuation tomograms for aquifer zonation. Water Resour. Res. 2004, 40, W01519. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1–9. [Google Scholar] [CrossRef]
- Qian, N. On the momentum term in gradient descent learning algorithms. Neural Netw. 1999, 12, 145–151. [Google Scholar] [CrossRef]
- Bottou, L.; Curtis, F.E.; Nocedal, J. Optimization methods for large-scale machine learning. SIAM Rev. 2018, 60, 223–311. [Google Scholar] [CrossRef]
- Smith, L.N. Cyclical learning rates for training neural networks. In Proceedings of the 2017 IEEE Winter Conference on Applications of Computer Vision (WACV), Santa Rosa, CA, USA, 24–31 March 2017; pp. 464–472. [Google Scholar]
- Irving, J.; Knight, R. Numerical modeling of ground-penetrating radar in 2-D using MATLAB. Comput. Geosci. 2006, 32, 1247–1258. [Google Scholar] [CrossRef]
- Yilmaz, Ö. Seismic Data Analysis: Processing, Inversion, and Interpretation of Seismic Data; Society of Exploration Geophysicists: Tulsa, OK, USA, 2001. [Google Scholar]
- Barrash, W.; Clemo, T. Hierarchical geostatistics and multifacies systems: Boise Hydrogeophysical Research Site, Boise, Idaho. Water Resour. Res. 2002, 38, 14-1–14-18. [Google Scholar] [CrossRef]
- Dafflon, B.; Barrash, W. Three-dimensional stochastic estimation of porosity distribution: Benefits of using ground-penetrating radar velocity tomograms in simulated-annealing- based or Bayesian sequential simulation approaches. Water Resour. Res. 2012, 48, W05553. [Google Scholar] [CrossRef]
- Bradford, J.H.; Clement, W.P.; Barrash, W. Estimating porosity with ground-penetrating radar reflection tomography: A controlled 3-D experiment at the Boise Hydrogeophysical Research Site. Water Resour. Res. 2009, 45, W00D26-1–W00D26-11. [Google Scholar] [CrossRef]
- Pirot, G.; Linde, N.; Mariethoz, G.; Bradford, J.H. Probabilistic inversion with graph cuts: Application to the Boise Hydrogeophysical Research Site. Water Resour. Res. 2017, 53, 1231–1250. [Google Scholar] [CrossRef]
- van der Baan, M. Time-varying wavelet estimation and deconvolution by kurtosis maximization. Geophysics 2008, 73, 11–18. [Google Scholar] [CrossRef]
- Liu, Y.; Irving, J.; Holliger, K. Weighted Diffraction-Based Migration Velocity Analysis of Common-Offset GPR Reflection Data. IEEE Trans. Geosci. Remote Sens. 2023, 61, 5901509. [Google Scholar] [CrossRef]
- Lowney, B.; Lokmer, I.; O’Brien, G.S. Multi-domain diffraction identification: A supervised deep learning technique for seismic diffraction classification. Comput. Geosci. 2021, 155, 104845. [Google Scholar] [CrossRef]
- Gelhar, L.W. Stochastic Subsurface Hydrology; Prentice-Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Grana, D.; Azevedo, L.; Liu, M. A comparison of deep machine learning and Monte Carlo methods for facies classification from seismic data. Geophysics 2020, 85, WA41–WA52. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Irving, J.; Holliger, K. Estimating Subsurface Geostatistical Properties from GPR Reflection Data Using a Supervised Deep Learning Approach. Remote Sens. 2025, 17, 2284. https://doi.org/10.3390/rs17132284
Liu Y, Irving J, Holliger K. Estimating Subsurface Geostatistical Properties from GPR Reflection Data Using a Supervised Deep Learning Approach. Remote Sensing. 2025; 17(13):2284. https://doi.org/10.3390/rs17132284
Chicago/Turabian StyleLiu, Yu, James Irving, and Klaus Holliger. 2025. "Estimating Subsurface Geostatistical Properties from GPR Reflection Data Using a Supervised Deep Learning Approach" Remote Sensing 17, no. 13: 2284. https://doi.org/10.3390/rs17132284
APA StyleLiu, Y., Irving, J., & Holliger, K. (2025). Estimating Subsurface Geostatistical Properties from GPR Reflection Data Using a Supervised Deep Learning Approach. Remote Sensing, 17(13), 2284. https://doi.org/10.3390/rs17132284