1. Introduction
Forest fire has been listed by the United Nations as one of the biggest threats to social crises and ecological disasters [
1]. It is one of the biggest threats to forest resources and ecological civilization construction and can destroy millions of acres of land at shockingly fast speeds. The duration of fire seasons globally has extended by 27% since 1979, and the severity has multiplied. It was reported that with global warming of 1.5 °C, the world would face inevitable multiple climate hazards, and even temporarily exceeding this warming level will cause additional severe impacts, some of which will be irreversible [
2]. This means that the fire prevention situation is extremely serious in the coming years.
In the background of high-frequency and -intensity forest fires driven by future warming and a drying climate, early detection and effective control of fires are extremely important to reduce losses resulting from forest fires. Satellite remote sensing, which is characterized by a wide observation and strong repeat observation capability, has become an important means of rapidly monitoring forest fires, replacing traditional means such as manual measurement and aerial photography [
3]. It has significant advantages over fires occurring in pristine forest areas that are difficult to access [
4].
Many scholars have made use of remote sensing data to study forest fire identification [
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20]. The Cooperative Institute for Meteorological Satellite Studies developed the Visible Infrared Spin Scan Radiometer Atmospheric Sounder (VAS) automated biomass burning algorithm (ABBA). Prins et al. wrote the Algorithm Theory Document of COESRABI Fire Point Recognition (ATBD) based on the ABBA [
12]. Dozier used the mid-infrared band for fire monitoring and proposed a sub-pixel fire point estimation model based on Planck’s law [
9], which was improved by many subsequent algorithms [
7,
13,
14]. Kaufman and others proposed the MODIS fire point detection algorithm based on the Advanced Very High-Resolution Radiometer (AVHRR) global fire point detection algorithm [
15,
16], which was further revised by Justice et al. [
17]. Giglio et al. [
7] further revised it in 2002, and devised a contextual active fire detection algorithm based on both the 4 µm brightness temperature and the 4 µm and 11 µm brightness temperature difference, which offered increased sensitivity to smaller, cooler fires as well as a lower false alarm rate. Qin et al. proposed a new detection index K ((T20 − T31)/T20) based on MODIS [
18,
19]. Gong et al. used the Breaks for Additive Segments and Trend (BFAST) algorithm to detect breakpoints of time-series data and identify potential fire points to address the deficiency associated with the fixed threshold discrimination method, which could not meet regional differences [
20].
With the development of remote sensing technology, high temporal resolution new-generation geostationary meteorological satellites (such as Himawari-8) are gradually replacing older-generation polar orbiting and geostationary meteorological satellites (VIIRS [
21], MODIS [
7], GOES [
22]), and are becoming mainstream in the Eastern Hemisphere [
23,
24,
25,
26,
27,
28,
29]. Xiong et al. [
27,
28,
30] used data from Himawari-8 and FY-4A to build various models for forest fire discrimination. Jang [
29] developed a method for obtaining effective fire detection parameters based on the ratios of Himawari-8 bands. Feng et al. [
31] used the ratio relationship between the value, mean value, and standard deviation of image pixels and developed a new index to distinguish potential fire points according to the brightness temperature changes of mid-infrared and thermal infrared when a fire occurred, and improved the discrimination accuracy.
Furthermore, to address the poor universality of thresholds, scholars have introduced machine learning algorithms, including the support vector machine (SVM), decision tree models, random forest (RF) classifiers, the maximum inter-class variance method (OTSU), and neural networks, into existing discrimination algorithms [
30,
32,
33,
34,
35]. While random forest classifiers can generate good discrimination results, they require the input of different parameters for different research areas, and the volume of input parameters is large. One-dimensional OTSU [
36] and two-dimensional OTSU [
37] cannot differentiate noise in the image close to the target, and the three-dimensional OTSU [
38] algorithm has not been effectively used in practical applications due to its high computational complexity and large amount of computation. Deep learning is limited by the size of the data for practical application.
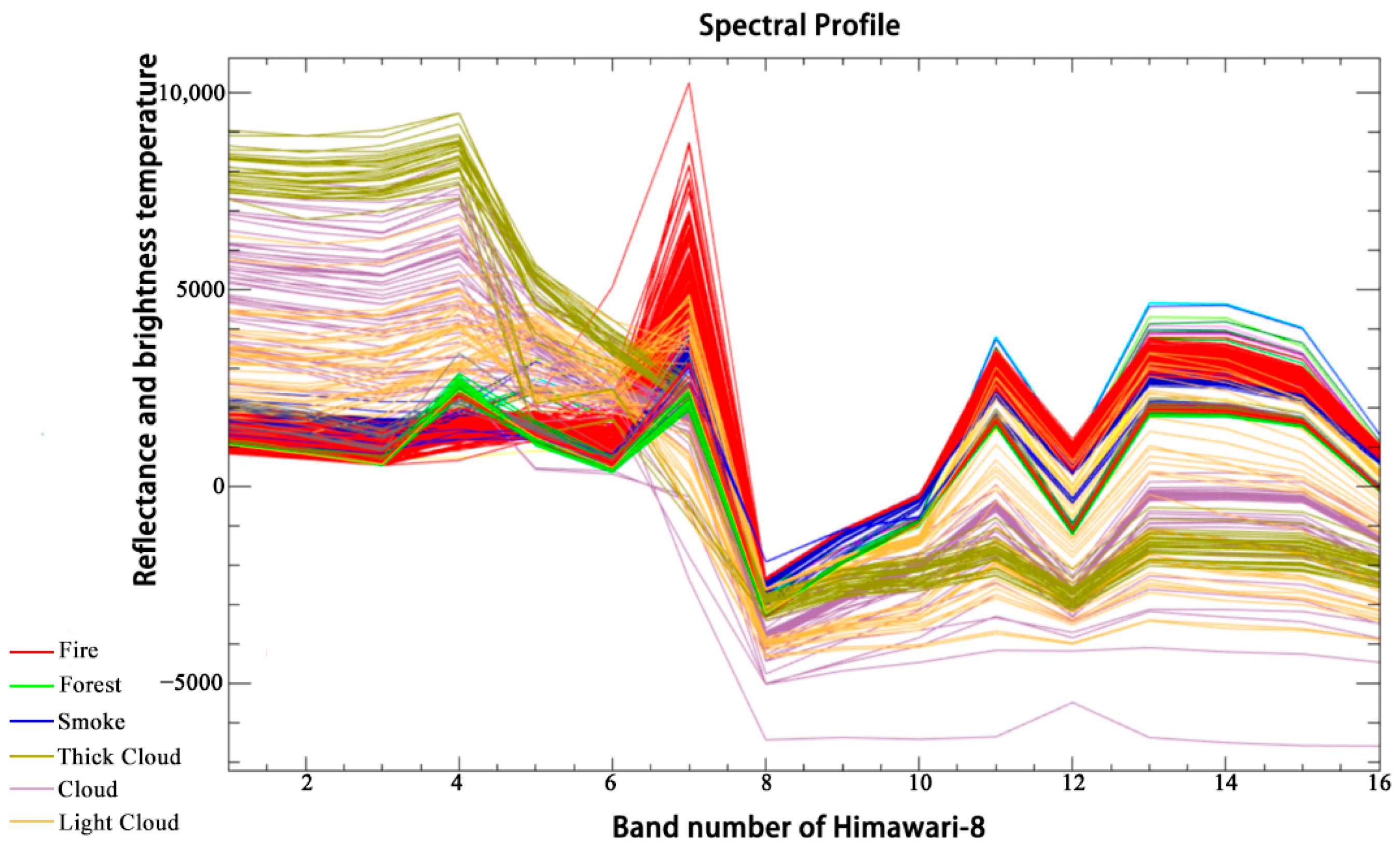
Most of the aforementioned forest fire monitoring methods are based on infrared band brightness values and the indices constructed from them, ignoring the changes of other bands during forest fires and the strong inter-band correlations. When forest fires occur, fire smoke, vegetation destruction, and thermal radiation changes can impact visible, near-infrared, and infrared bands, and there is a strong correlation between each independent band in the spectral imagery. The relationship between bands of different wavelengths in the spectral data is as important as the reflectance and brightness temperature values. Scholars have made some attempts in this area [
32,
39,
40,
41,
42,
43,
44], proposing different methods such as the brightness temperature–vegetation index–aerosol optical depth method [
39], the brightness temperature–smoke fusion method [
32,
40], and the solar zenith angle [
41]. Wooster et al. constructed the fire point extraction index [
42] of the LSA SAF Meteosat satellite based on the brightness temperature of IR 3.9 µm (MWIR), IR 10.8 µm (LWIR), and IR 12.0 µm (LWIR) channels and the spectral radians of IR 3.9 µm and VIS 0.6 µm (visible) channels based on the SEVIRI sensor of the European Meteosat satellite. This method uses a lower threshold to avoid the missed detection of fire points as much as possible, but the pixel parameter value in the area uniformly heated by the sun may also reach the detection limit, leading to a large error. Pan et al. [
43] considered the effects of the atmosphere and sun on smaller surfaces in daytime images and devised a more practical spectral method, but the method still could not produce corresponding effects in complex real environments.
To address the above problems, this paper constructs new indexes for forest fire discriminant which make full use of the spectral bands of satellite remote sensing images and their strong correlation. The decomposed 3-dimensional OTSU adaptive threshold segmentation algorithm is adopted according to the background differences in different regions at the same time, with a goal to improve the accuracy of fire point recognition.
4. Discussion
Forest fire monitoring has always been a hot research topic. Many scholars have made use of remote sensing data to study forest fire identification. In this paper, we took the high temporal resolution advantage of the Himawari-8 satellite and used a method based on angle slope indexes (ASIs) for forest fire monitoring. The results show that ASI can distinguish between the forest background and fire spots well, and is more accurate in detecting early fire. However, the performance of the visible spectral change and the correlation between bands in the spectral imagery are not as favorable compared to the forest fire infrared radiation monitoring, which are also important factors of forest fire monitoring. Determining how to further improve forest fire identification accuracy on this basis is what we have been studying. Recently, Xu et al. [
32] combined the forest fire infrared radiation monitoring and forest fire smoke detection for forest fire monitoring, which reduced the phenomenon of forest fire omission error. However, the methods for detecting smoke from forest fire rely solely on the information provided by images, ignoring the biomass change information and the error caused by dense smoke. When smoke rises with hot air, the imagery often involves a mix of smoke and clouds, which makes the identification of fire smoke plumes extremely difficult.
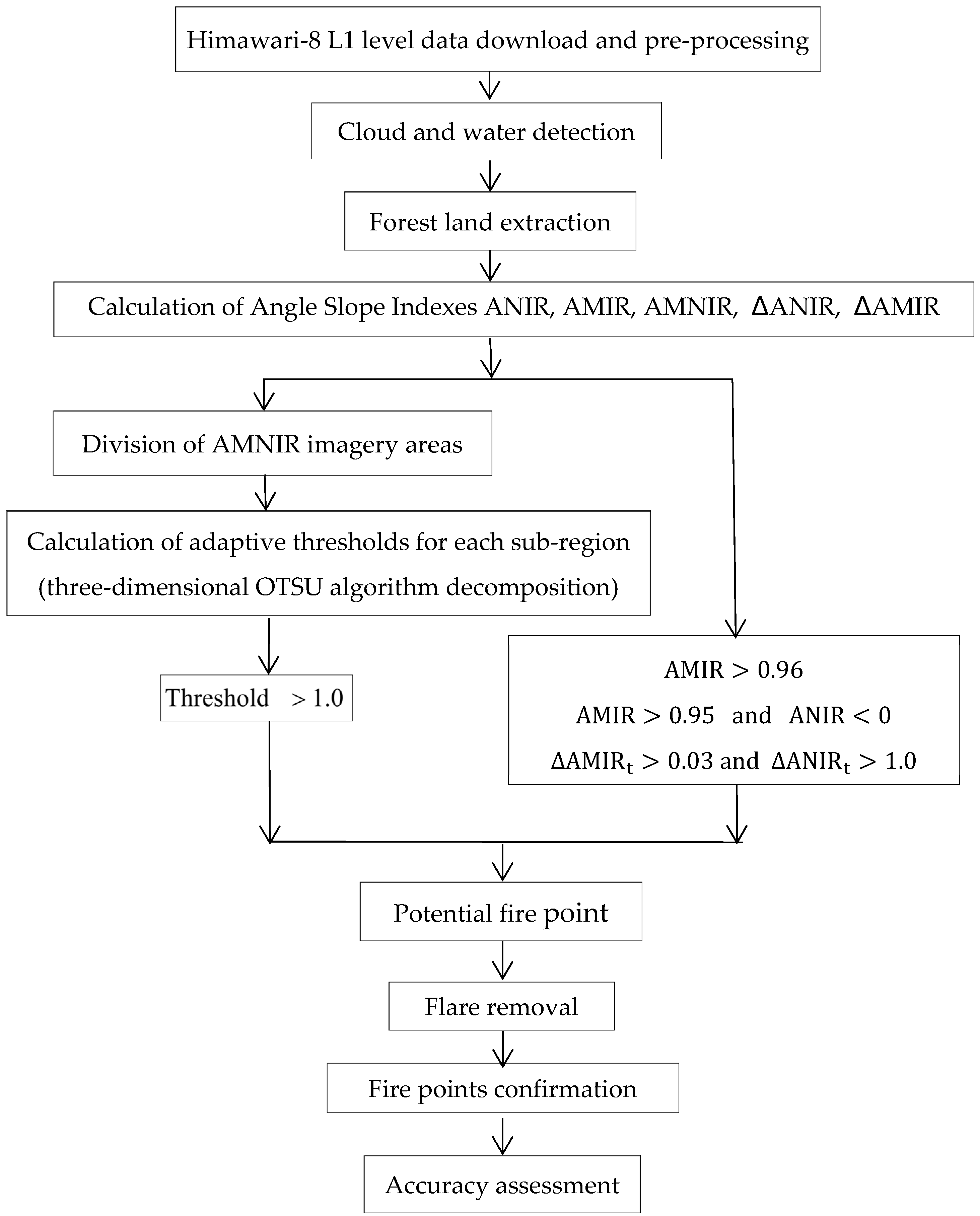
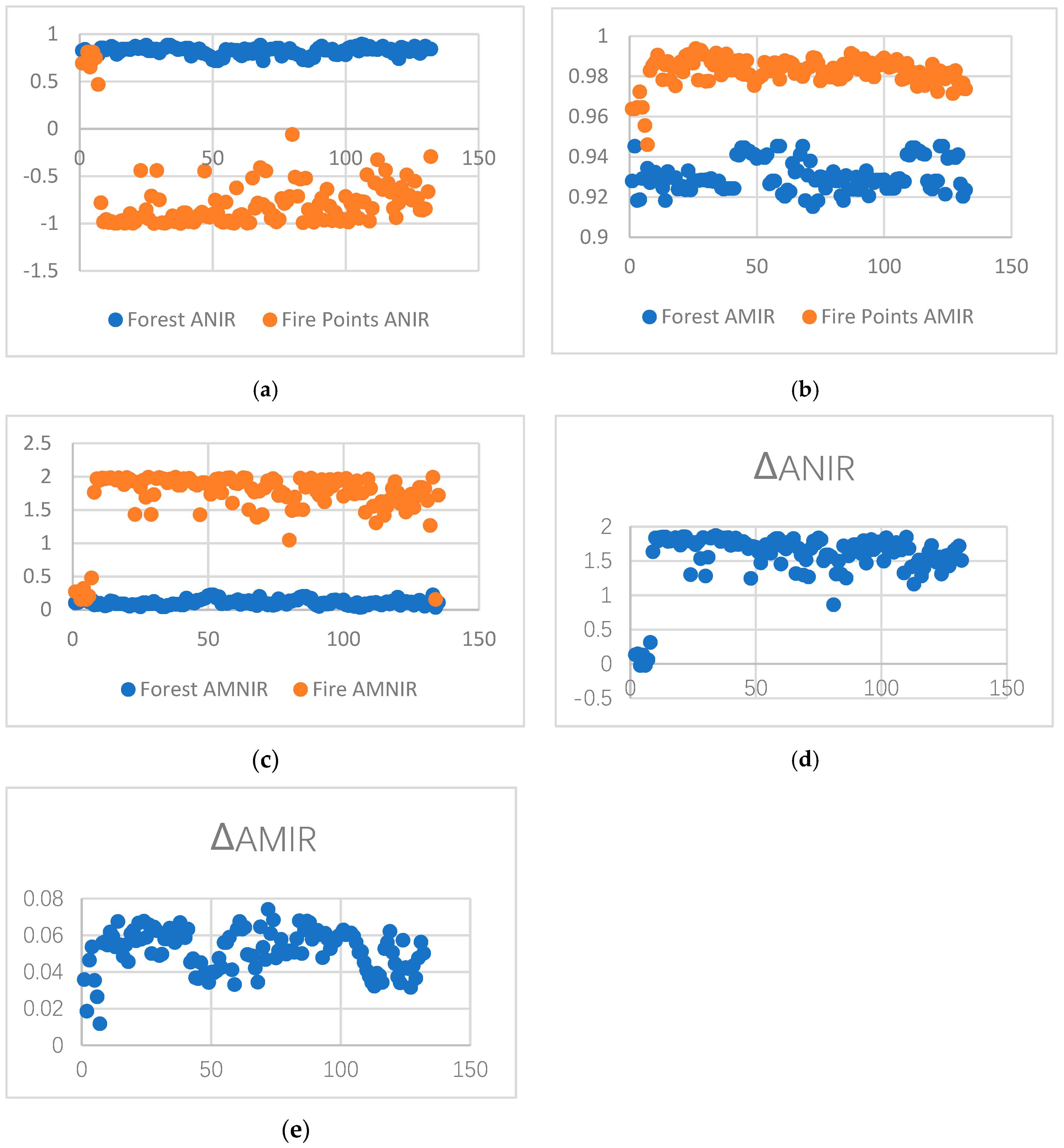
The ASI constructed in this paper combines the visible and infrared bands for biomass change and fire smoke, and also integrates the strong inter-band correlation, which is more sensitive to fire. Furthermore, in response to omission error, we constructed time-series angle slope difference indices ∆ANIR and ∆AMIR, and employed a decomposed three-dimensional OTSU algorithm to calculate the fire point discrimination thresholds for sub-regions of the study area. The proposed ASITR and FDOA were tested in Hunan Province, China. Results show that the evaluation indexes P, M, and F were all better than the forest fire infrared radiation monitoring [
31]. Compared with ASITR, the accuracy of FDOA decreased by 3.41% (0.88 vs. 0.85), the omission error decreased by 52.94% (0.17 vs. 0.08), and the overall evaluation increased by 3.53% (0.85 vs. 0.88). The ASITR exhibits higher accuracy, and the FDOA can reduce the phenomenon of forest fire omission error and improve the overall evaluation. The likely reasons for the slightly lower accuracy of FDOA may be as follows: (1) the sample data for statistical analysis were from Australia, which is located in a tropical and subtropical region, and the statistical results were slightly higher than that of China, most of which lies north of the Tropic of Cancer, in the north temperate zone; (2) the cloud detection process did not take into account the dense smoke caused by forest fire, which is difficult to distinguish from clouds; (3) the outliers in the angle slope indexes, which are caused by the low intensity and temperature of the early stages of fire, or other particles generated during biomass combustion; and (4) the high temporal resolution of Himawari-8 remote sensing data allows for near-real-time observation of fires, which is beneficial for early detection; however, its lower spatial resolution imposes some restrictions on the identification of small-scale fires.
In future work, the following aspects deserve further in-depth study: (1) collect fire point samples from countries around the world to improve the applicability of statistical thresholds, and validate and conduct the proposed methods in different regions; (2) further study of the change rule in visible light reflectance and ANIR, especially when the fire smoke becomes dense; (3) integration of multi-source remote sensing data and sub-pixel techniques to improve spatial resolution; and (4) incorporation of cutting-edge technologies like neural networks and deep learning with spectrograms.
5. Conclusions
Using the strong correlation between spectral bands and the changes in spectral graphs caused by forest fires, new forest fire monitoring indices, the angle slope indices, have been developed. Forest fire point discrimination based on the angle slope indices AMIR, ANIR, , and (ASITR) shows high accuracy but also reveals some instances of missed fires. The decomposed three-dimensional OTSU algorithm is applied for adaptive threshold segmentation on sub-regions constructed from AMNIR data, combined with the angle slope index threshold method for fire discrimination. This monitoring approach not only improves the accuracy of fire identification but also reduces the miss rate. The research findings have significant practical implications for early detection and control of forest fires, with the main discoveries summarized as follows:
The occurrence of forest fires causes changes in both the reflectance of the visible light bands and the brightness temperatures of the infrared bands. Monitoring these changes simultaneously enhances sensitivity and accuracy in fire detection. The angle slope indices are constructed based on changes in the spectral graphs of visible light reflectance and infrared brightness temperatures. Using historical data, Himawari-8 fire products (reliability = 5), visually interpreted data, 257 cloud-free fire point samples, and 132 pre-disaster forest land samples in Australia were collected. The angle slope indices values of fire points were calculated and statistically analyzed, setting threshold values for potential fire points at 0.96 or 0.95 for AMIR, 0 for ANIR, 0.03 for , and 1.0 for .
The method based on the ASITR was used to monitor 88 forest fires that occurred at nine different times during 2018–2021 in Hunan Province, China. As compared to the method proposed by Feng et al. (accuracy 0.84, miss rate 0.24, overall evaluation 0.8), accuracy increased by 9.25%, the miss rate decreased by 3.07%, and the overall evaluation index rose by 2.62%. Results show that the evaluation indexes P, M, and F were all better than the forest fire infrared radiation monitoring.
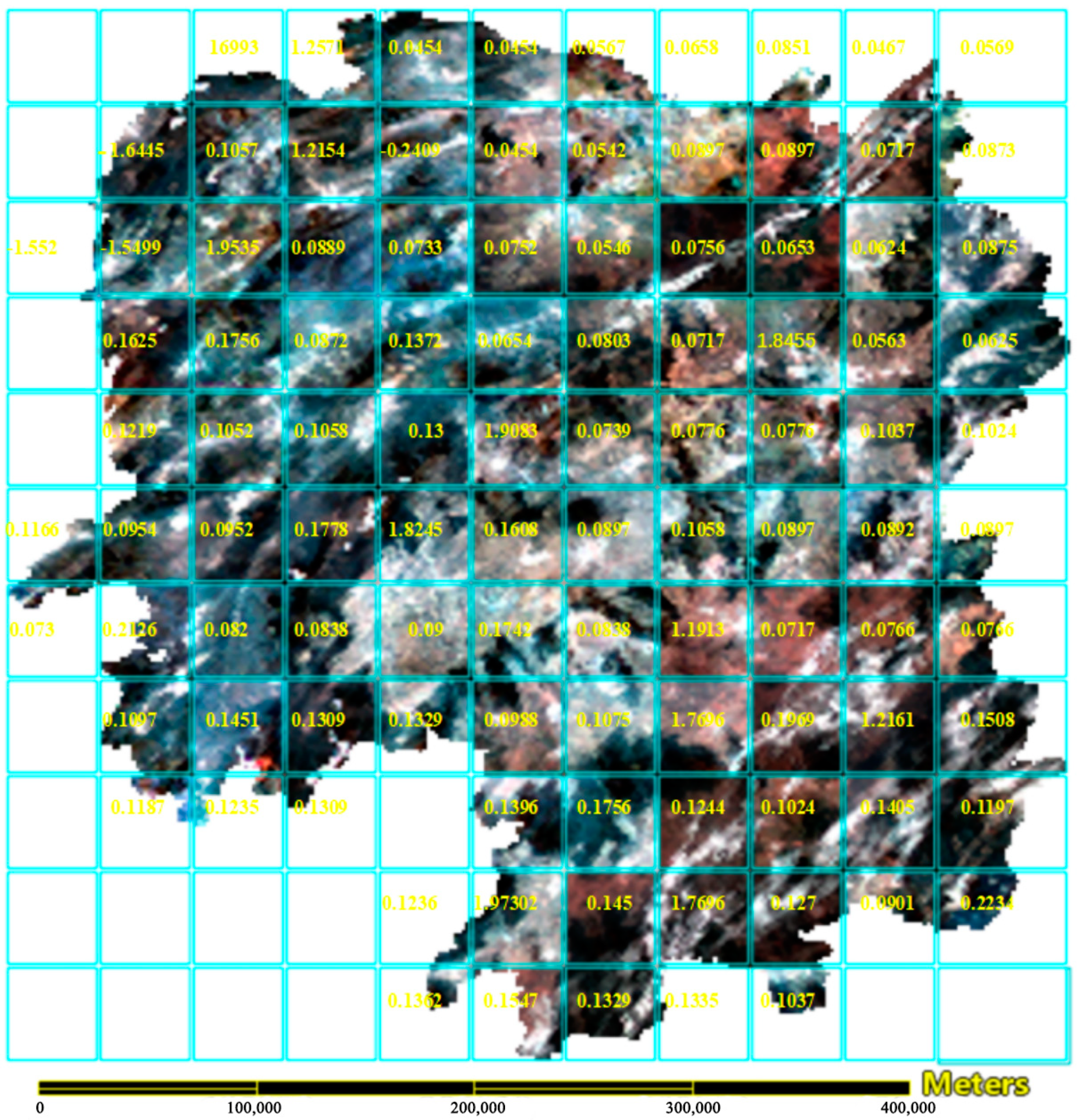
To address the difference in fire point detection thresholds under different temporal and spatial backgrounds, the decomposed three-dimensional OTSU algorithm was used for adaptive threshold segmentation based on the imagery constructed from AMNIR index data. According to the segmentation results (as shown in the example in
Figure 8), the thresholds were mostly below 0.2, with lower latitude regions having slightly higher thresholds than higher latitude regions. According to the statistical results of angle slope indices, the maximum value of the fire point AMNIR index was 1.9926, the mean value was 1.7108, and most of the values were greater than 1.0. Therefore, if the segmentation threshold is less than 1.0, it is considered that there is no fire occurrence.
Forest fire identification (FDOA) based on the fusion of angle slope difference index (AMNIR) data, the decomposed three-dimensional OTSU adaptive threshold segmentation algorithm, and ASITR shows large fluctuations in accuracy, with a maximum of 100% and a minimum of 71.43% (i.e., a difference of 28.57%), and an average value of 84.92%, which is higher than the method based on Z indices (the indices were constructed based on the ratio between the element value, mean value, and standard deviation of the infrared bands’ bright temperature images) proposed by Feng et al. [
1], but slightly lower than the results from the threshold method based on the angle slope index (ASITR) (88.25%). The missed rate is consistently lower than that of the ASITR method, with an average reduction in the missed rate of 8.95%, and the overall index is 87.85%, higher than that of the ASITR method by 2.52%. The results show that the FDOA method effectively enhances the precision of forest fire detection.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}