
Research on Automatic Wavelength Calibration of Passive DOAS Observations Based on Sequence Matching Method

 , ,
, ,
Abstract
1. Introduction
2. Passive DOAS Wavelength Automatic Calibration Algorithm
2.1. Definition of Passive DOAS Spectral Sequence Matching
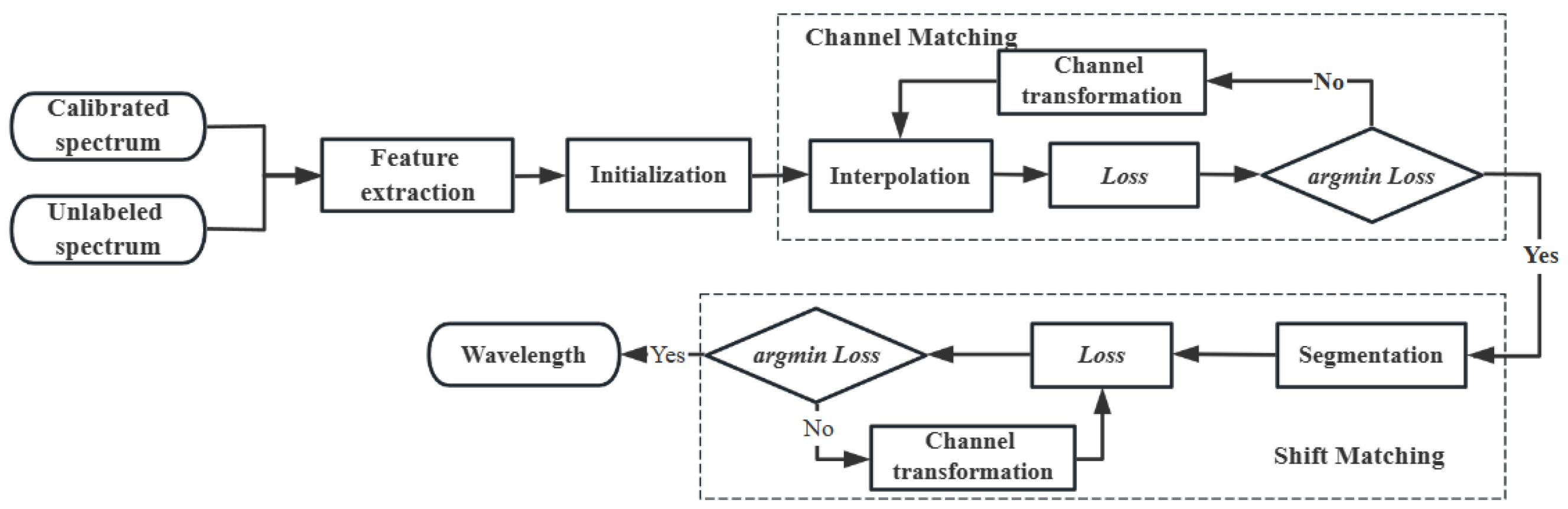
2.2. Wavelength Calibration Algorithm Based on Sequence Matching
2.3. Algorithm Implementation and Parameter Setting
3. Sensitivity Testing of Algorithm Parameters
3.1. Synthetic Spectra Based on the Standard Reference Spectrum
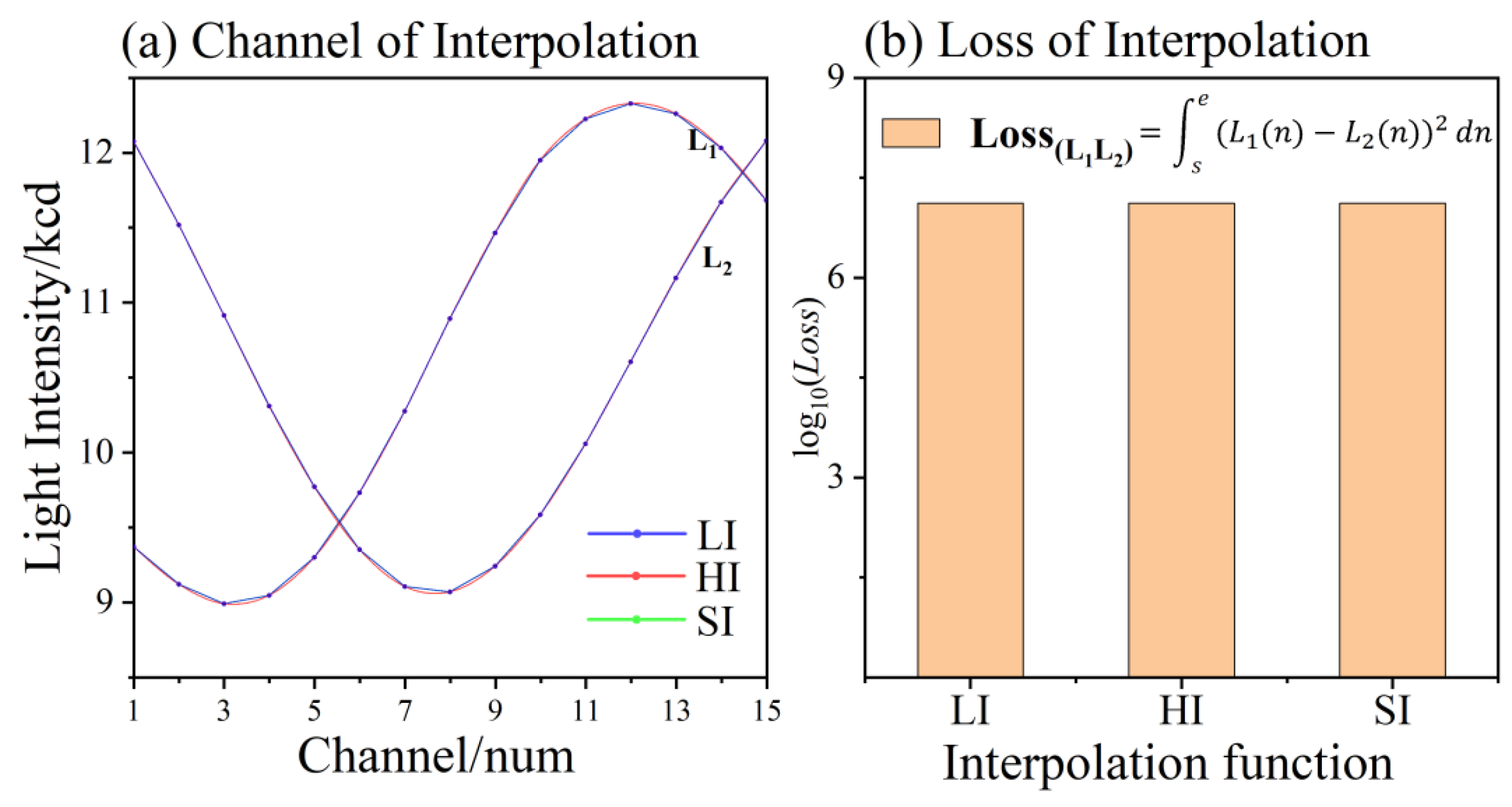
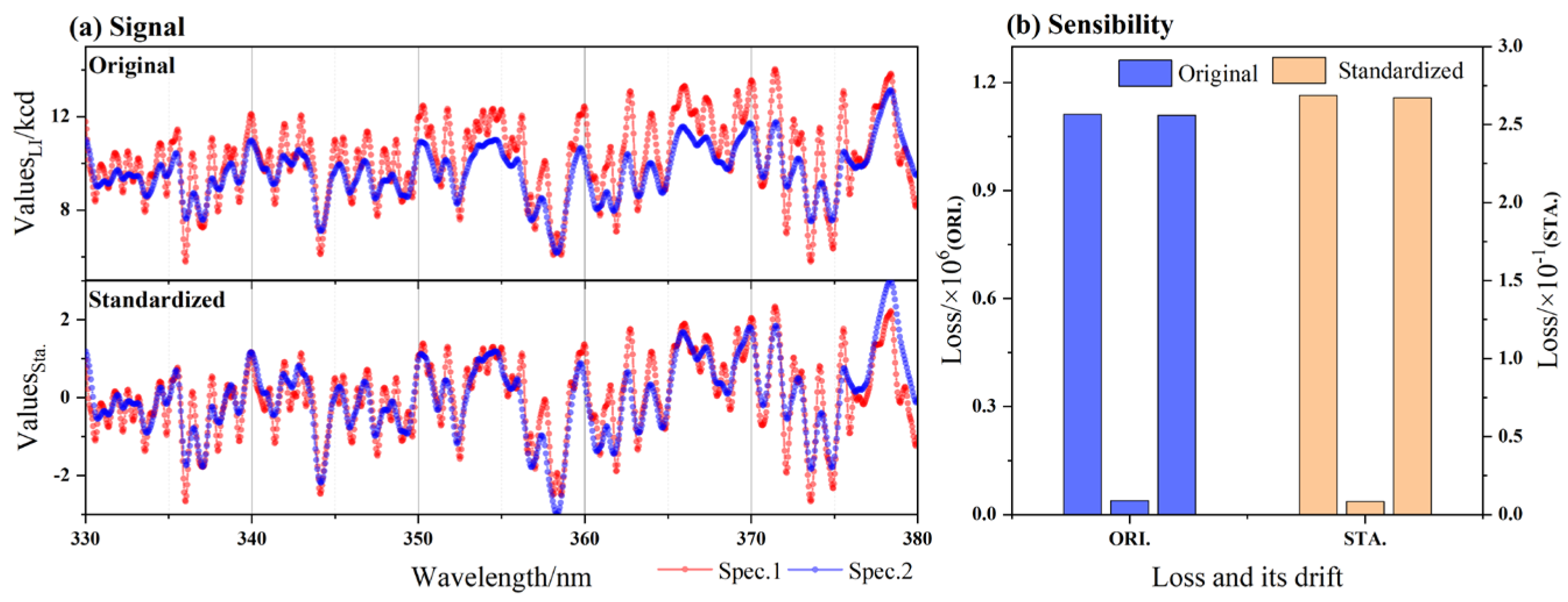
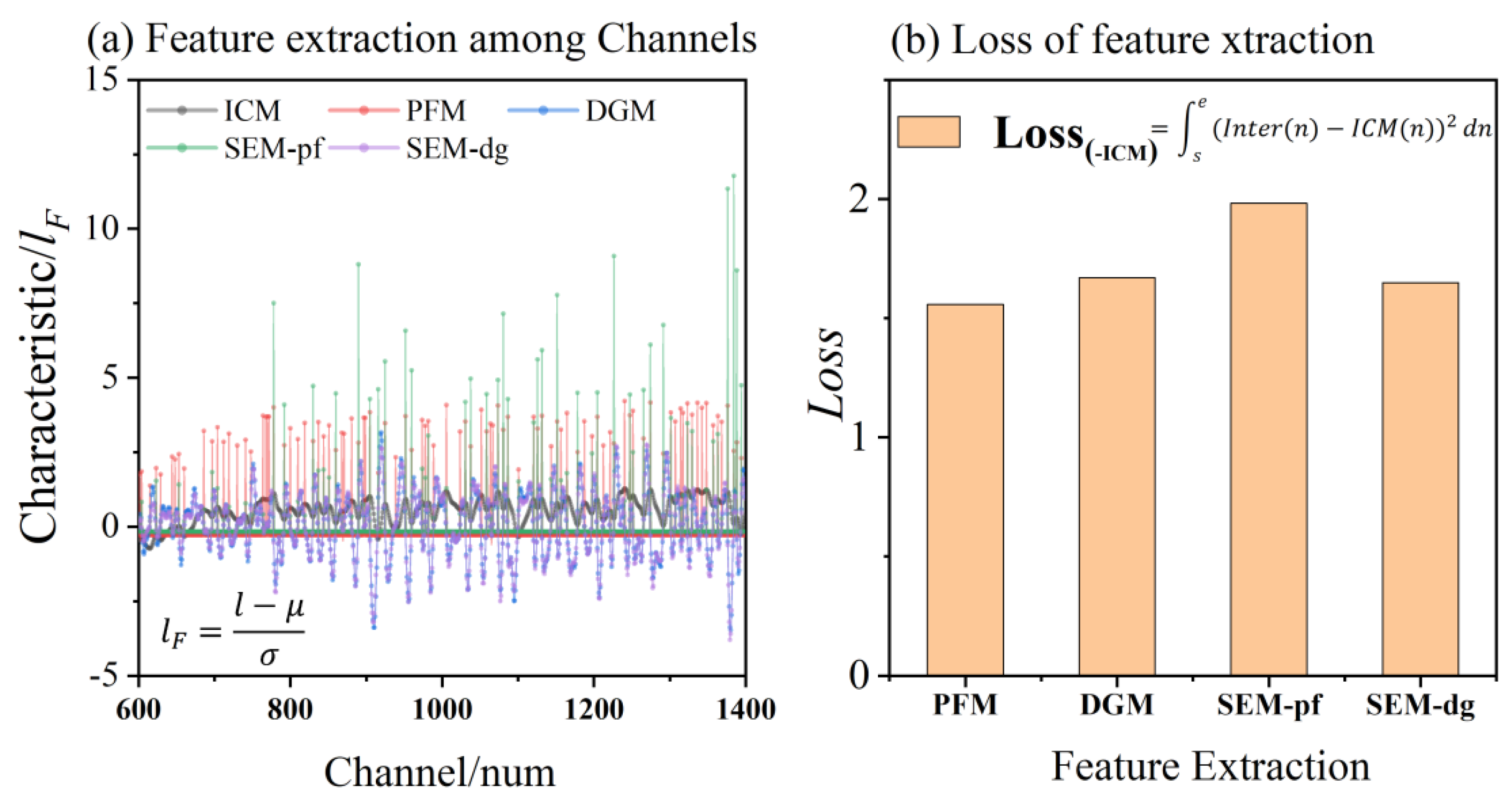
3.2. Parameter Sensitivity Experiments
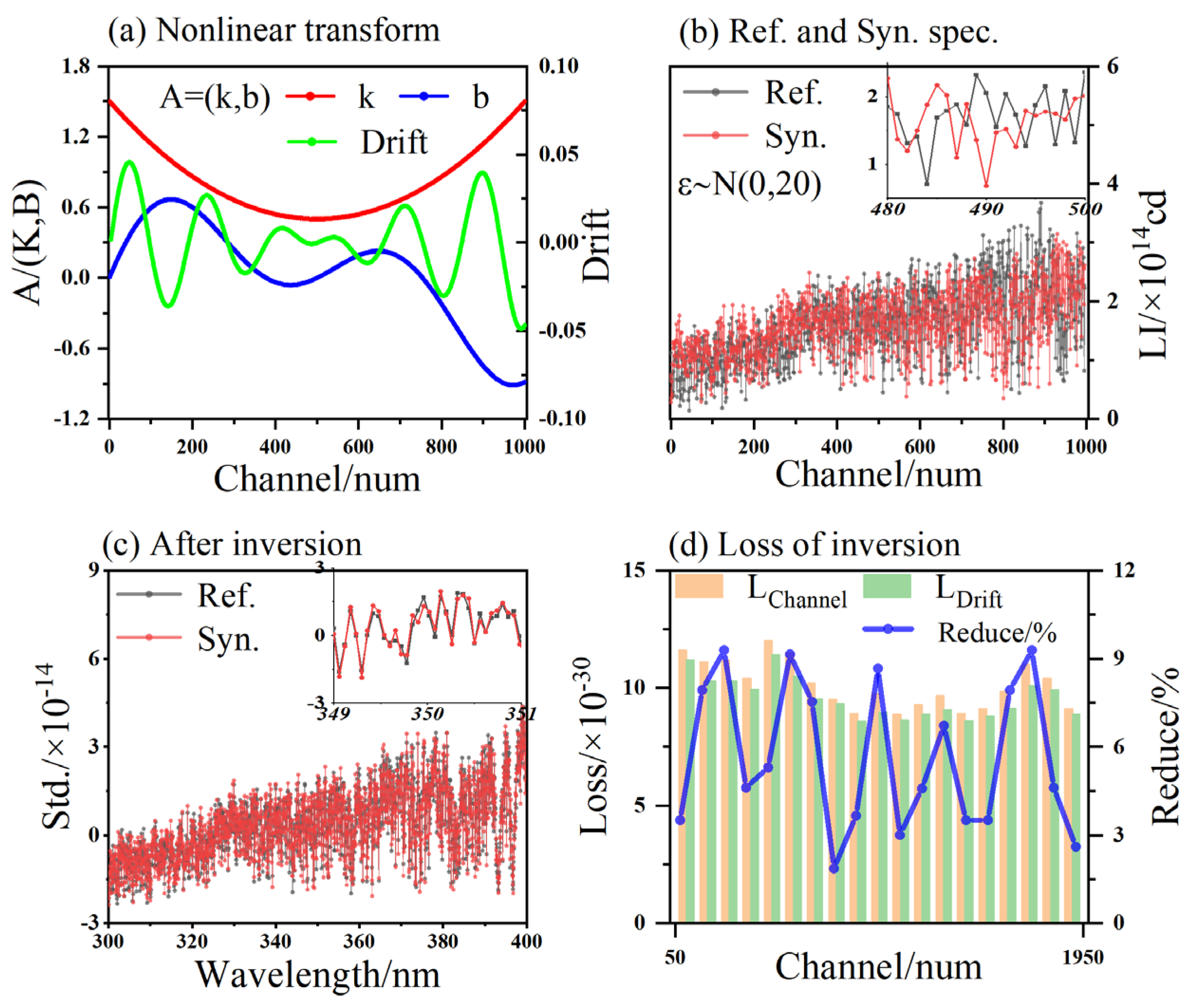
3.3. Comprehensive Inversion under Complex Transformations
4. Application of Wavelength Calibration in Practical Remote Sensing
4.1. Wavelength Calibration under Different References
4.2. Wavelength Calibration of Mobile MAX-DOAS
4.3. Comparison of Spectral Inversion Products
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Platt, U.; Perner, D.; Pätz, H.W. Simultaneous measurement of atmospheric CH2O, O3, and NO2 by differential optical absorption. J. Geophys. Res. Ocean. 1979, 84, 6329–6335. [Google Scholar] [CrossRef]
- Hönninger, G.; von Friedeburg, C.; Platt, U. Multi axis differential optical absorption spectroscopy (MAX-DOAS). Atmos. Chem. Phys. 2004, 4, 231–254. [Google Scholar] [CrossRef]
- Platt, U.; Stutz, J. Differential Optical Absorption Spectroscopy. In Physics of Earth and Space Environments; Springer: Berlin, Germany, 2008. [Google Scholar] [CrossRef]
- Rodgers, C.D. Inverse Methods for Atmospheric Sounding-Theory and Practice. In Series on Atmospheric Oceanic and Planetary Physics; World Scientific Publishing Co.: Singapore, 2000. [Google Scholar] [CrossRef]
- Wagner, T.; Dix, B.; Friedeburg, C.V.; Frieß, U.; Sanghavi, S.; Sinreich, R.; Platt, U. MAX-DOAS O4measurements: A new technique to derive information on atmospheric aerosols-Principles and information content. J. Geophys. Res. Atmos. 2004, 109, D22. [Google Scholar] [CrossRef]
- Sinreich, R.; Frieß, U.; Wagner, T.; Platt, U. Multi axis differential optical absorption spectroscopy (MAX-DOAS) of gas and aerosol distributions. Faraday Discuss. 2005, 130, 153. [Google Scholar] [CrossRef]
- Zheng, J.; Xie, P.; Tian, X.; Xu, J.; Li, A.; Ren, B.; Hu, F.; Hu, Z.; Lv, Y.; Zhang, Z.; et al. McPrA-A new gas profile inversion algorithm for MAX-DOAS and apply to 50 m vertical resolution. Sci. Total Environ. 2023, 901, 165828. [Google Scholar] [CrossRef] [PubMed]
- Kreher, K.; Van Roozendael, M.; Hendrick, F.; Apituley, A.; Dimitropoulou, E.; Frieß, U.; Richter, A.; Wagner, T.; Lampel, J.; Abuhassan, N.; et al. Intercomparison of NO2, O4, O3 and HCHO slant column measurements by MAX-DOAS and zenith-sky UV–visible spectrometers during CINDI-2. Atmospheric Meas. Tech. 2020, 13, 2169–2208. [Google Scholar] [CrossRef]
- Tirpitz, J.-L.; Frieß, U.; Hendrick, F.; Alberti, C.; Allaart, M.; Apituley, A.; Bais, A.; Beirle, S.; Berkhout, S.; Bognar, K.; et al. Intercomparison of MAX-DOAS vertical profile retrieval algorithms: Studies on field data from the CINDI-2 campaign. Atmos. Meas. Tech. 2021, 14, 1–35. [Google Scholar] [CrossRef]
- Wang, P.; Richter, A.; Bruns, M.; Burrows, J.P.; Scheele, R.; Junkermann, W.; Heue, K.-P.; Wagner, T.; Platt, U.; Pundt, I. Airborne multi-axis DOAS measurements of tropospheric SO2 plumes in the Po-valley, Italy. Atmos. Chem. Phys. 2010, 6, 329–338. [Google Scholar] [CrossRef]
- Tuckermann, M.; Ackermann, R.; Gölz, C.; Lorenzen-Schmidt, H.; Senne, T.; Stutz, J.; Trost, B.; Unold, W.; Platt, U. DOAS-observation of halogen radical-catalysed arctic boundary layer ozone destruction during the ARCTOC campaigns 1995 and 1996 in Ny-Ålesund, Spitsbergen. Tellus B Chem. Phys. Meteorol. 2012, 49, 533. [Google Scholar] [CrossRef]
- Wu, F.; Xie, P.; Li, A.; Mou, F.; Chen, H.; Zhu, Y.; Zhu, T.; Liu, J.; Liu, W. Investigations of temporal and spatial distribution of precursors SO2 and NO2 vertical columns in the North China Plain using mobile DOAS. Atmos. Chem. Phys. 2018, 18, 1535–1554. [Google Scholar] [CrossRef]
- Wagner, T.; Beirle, S.; Dörner, S.; Penning de Vries, M.; Remmers, J.; Rozanov, A.; Shaiganfar, R. A new method for the absolute radiance calibration for UV–vis measurements of scattered sunlight. Atmos. Meas. Tech. 2015, 8, 4265–4280. [Google Scholar] [CrossRef]
- Wagner, T.; Beirle, S.; Deutschmann, T. Three-dimensional simulation of the Ring effect in observations of scattered sun light using Monte Carlo radiative transfer models. Atmos. Meas. Tech. 2010, 2, 113–124. [Google Scholar] [CrossRef]
- Wagner, T.; Beirle, S.; Deutschmann, T.; Penning de Vries, M. A sensitivity analysis of Ring effect to aerosol properties and comparison to satellite observations. Atmos. Meas. Tech. 2010, 3, 1723–1751. [Google Scholar] [CrossRef]
- Deutschmann, T.; Beirle, S.; Frieß, U.; Grzegorski, M.; Kern, C.; Kritten, L.; Platt, U.; Prados-Román, C.; Wagner, T.; Werner, B.; et al. The Monte Carlo atmospheric radiative transfer model McArtim: Introduction and validation of Jacobians and 3D features. J. Quant. Spectrosc. Radiat. Transf. 2011, 112, 1119–1137. [Google Scholar] [CrossRef]
- Woods, T.N.; Snow, M.; Harder, J.; Chapman, G.; Cookson, A. A Different View of Solar Spectral Irradiance Variations: Modeling Total Energy over Six-Month Intervals. Sol. Phys. 2015, 290, 2649–2676. [Google Scholar] [CrossRef] [PubMed]
- Chance, K.V.; Spurr, R.J.D. Ring effect studies: Rayleigh scattering, including molecular parameters for rotational Raman scattering, and the Fraunhofer spectrum. Appl. Opt. 1997, 36, 5224. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Hennelly, B.M. Improved Wavelength Calibration by Modeling the Spectrometer. Appl. Spectrosc. 2022, 76, 1283–1299. [Google Scholar] [CrossRef] [PubMed]
- Beirle, S.; Lampel, J.; Lerot, C.; Sihler, H.; Wagner, T. Parameterizing the instrumental spectral response function and its changes by a super-Gaussian and its derivatives. Atmos. Meas. Tech. 2017, 10, 581–598. [Google Scholar] [CrossRef]
- Chance, K.; Kurucz, R.L. An improved high-resolution solar reference spectrum for earths atmosphere measurements in the ultraviolet, visible, and near infrared. J. Quant. Spectrosc. Radiat. Transf. 2010, 111, 1289–1295. [Google Scholar] [CrossRef]
- Wu, H.; Zheng, C.; Zhang, Q.; Liu, Z.; Liang, F.; Feng, G. Calibration of mercury lamp wavelength. Optical Precision Manufacturing, Testing, and Applications. In Proceedings of the Optical Precision Manufacturing, Testing, and Applications, Beijing, China, 22–24 May 2018. [Google Scholar] [CrossRef]
- Sun, C.; Wang, M.; Cui, J.; Yao, X.; Chen, J. Comparison and analysis of wavelength calibration methods for prism–Grating imaging spectrometer. Results Phys. 2019, 12, 143–146. [Google Scholar] [CrossRef]
- Yu, C.; Yang, J.; Wang, M.; Sun, C.; Song, N.; Cui, J.; Feng, S. Research on spectral reconstruction algorithm for snapshot microlens array micro-hyperspectral imaging system. Opt. Express 2021, 29, 26713. [Google Scholar] [CrossRef] [PubMed]
- Yuan, L.; Qiu, L. Wavelength calibration methods in laser wavelength measurement. Appl. Opt. 2021, 60, 4315. [Google Scholar] [CrossRef] [PubMed]
- Yazdani, N.; Ozsoyoglu, Z.M. Sequence matching of images. In Proceedings of the 8th International Conference on Scientific and Statistical Data Base Management, Stockholm, Sweden, 18–20 June 1996. [Google Scholar] [CrossRef]
- Li, H.; Liang, Y.; Xu, Q.; Cao, D. Key wavelengths screening using competitive adaptive reweighted sampling method for multivariate calibration. Anal. Chim. Acta 2009, 648, 77–84. [Google Scholar] [CrossRef] [PubMed]
- Pei, S.C.; Cheng, C.M. Extracting color features and dynamic matching for image database retrieval. IEEE Trans. Circuits Syst. Video Technol. 1999, 9, 501–512. [Google Scholar] [CrossRef][Green Version]
- Chen, Y.; Jiang, H.; Li, C.; Jia, X.; Ghamisi, P. Deep Feature Extraction and Classification of Hyperspectral Images Based on Convolutional Neural Networks. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6232–6251. [Google Scholar] [CrossRef]
- Faber, N.M.; Rajkó, R. How to avoid over-fitting in multivariate calibration—The conventional validation approach and an alternative. Anal. Chim. Acta 2007, 595, 98–106. [Google Scholar] [CrossRef] [PubMed]
- Thalman, R.; Volkamer, R. Temperature dependent absorption cross-sections of O2–O2 collision pairs between 340 and 630 nm and at atmospherically relevant pressure. Phys. Chem. Chem. Phys. 2013, 15, 15371. [Google Scholar] [CrossRef] [PubMed]
- Che, H.; Zhang, X.; Chen, H.; Damiri, B.; Goloub, P.; Li, Z.; Zhang, X.; Wei, Y.; Zhou, H.; Dong, F.; et al. Instrument calibration and aerosol optical depth validation of the China Aerosol Remote Sensing Network. J. Geophys. Res. Atmos. 2009, 114, 1130. [Google Scholar] [CrossRef]
- Danckaert, T.; Fayt, C.; Roozendael, M.; Smedt, I.; Letocart, V.; Merlaud, A.; Pinardi, G. QDOAS Software User Manual; QDOAS: Uccle, Belgium, 2016. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EAs(θ) | 1° | 2° | 3° | 4° | 5° | 6° | 8° | 15° | 30° | 90° |
|---|---|---|---|---|---|---|---|---|---|---|
| Cha.s.pixel | 502 | 502 | 502 | 502 | 501 | 501 | 501 | 501 | 502 | 502 |
| Cha.e.pixel | 1226 | 1226 | 1226 | 1226 | 1226 | 1225 | 1225 | 1226 | 1226 | 1226 |
| Drifts.sub-pixel | 0.234 | 0.142 | 0.038 | 0.129 | 0.261 | 0.355 | 0.674 | 0.582 | 0.632 | 0.173 |
| Drifte.sub-pixel | 0.062 | 0.615 | 0.348 | 0.257 | 0.199 | 0.652 | 0.544 | 0.135 | 0.266 | 0.012 |
| Diff.MAX/10−3 nm | 6.4 | 7.2 | 5.3 | 4.3 | 1.6 | 2.5 | 1.9 | 2.8 | 4.6 | 3.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, J.; Xie, P.; Tian, X.; Xu, J.; Qin, M.; Hu, F.; Lv, Y.; Zhang, Z.; Zhang, Q.; Liu, W. Research on Automatic Wavelength Calibration of Passive DOAS Observations Based on Sequence Matching Method. Remote Sens. 2024, 16, 1485. https://doi.org/10.3390/rs16091485
Zheng J, Xie P, Tian X, Xu J, Qin M, Hu F, Lv Y, Zhang Z, Zhang Q, Liu W. Research on Automatic Wavelength Calibration of Passive DOAS Observations Based on Sequence Matching Method. Remote Sensing. 2024; 16(9):1485. https://doi.org/10.3390/rs16091485
Chicago/Turabian StyleZheng, Jiangyi, Pinhua Xie, Xin Tian, Jin Xu, Min Qin, Feng Hu, Yinsheng Lv, Zhidong Zhang, Qiang Zhang, and Wenqing Liu. 2024. "Research on Automatic Wavelength Calibration of Passive DOAS Observations Based on Sequence Matching Method" Remote Sensing 16, no. 9: 1485. https://doi.org/10.3390/rs16091485
APA StyleZheng, J., Xie, P., Tian, X., Xu, J., Qin, M., Hu, F., Lv, Y., Zhang, Z., Zhang, Q., & Liu, W. (2024). Research on Automatic Wavelength Calibration of Passive DOAS Observations Based on Sequence Matching Method. Remote Sensing, 16(9), 1485. https://doi.org/10.3390/rs16091485