

Assessment of the Real-Time and Rapid Precise Point Positioning Performance Using Geodetic and Low-Cost GNSS Receivers



Abstract
1. Introduction
2. Theory and Methods
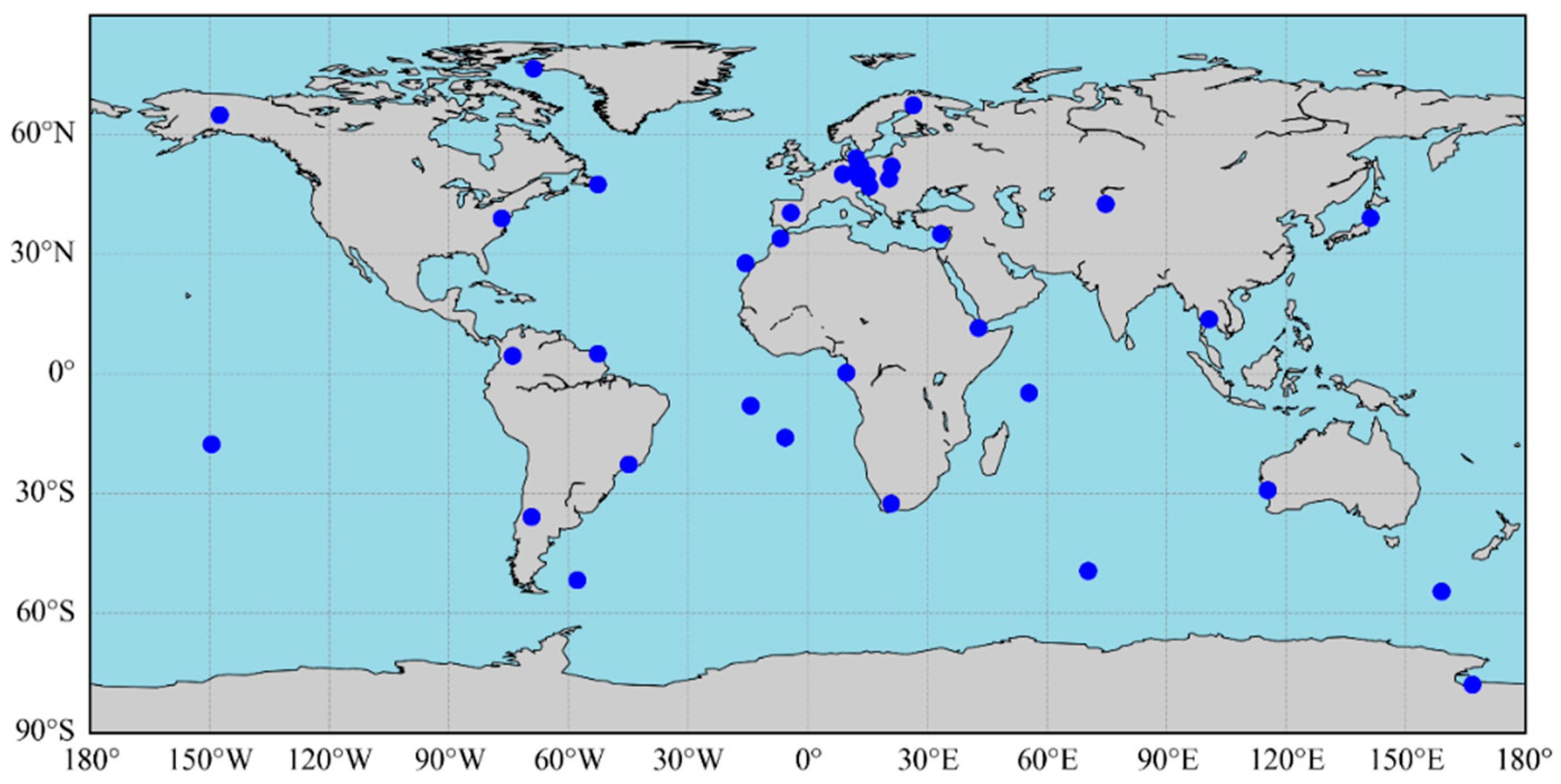
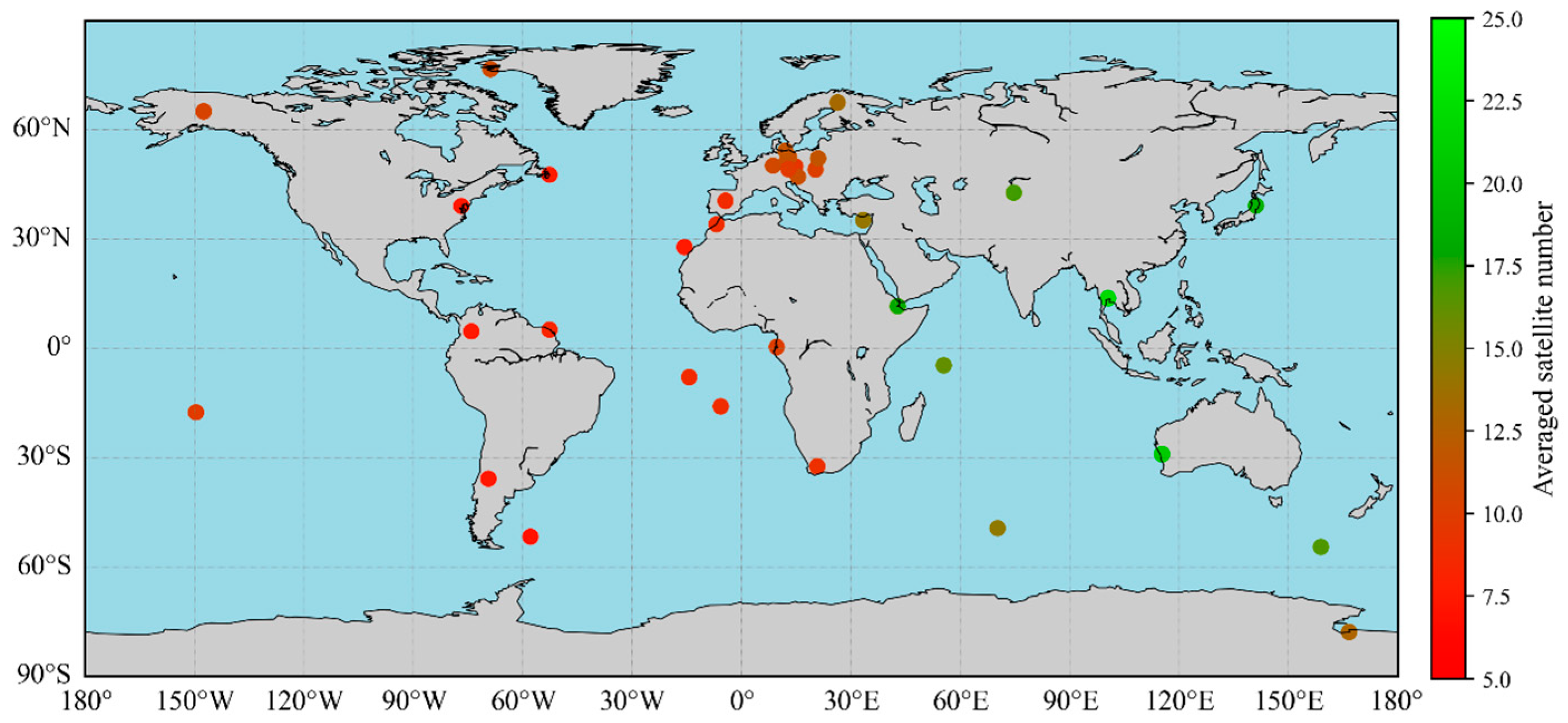
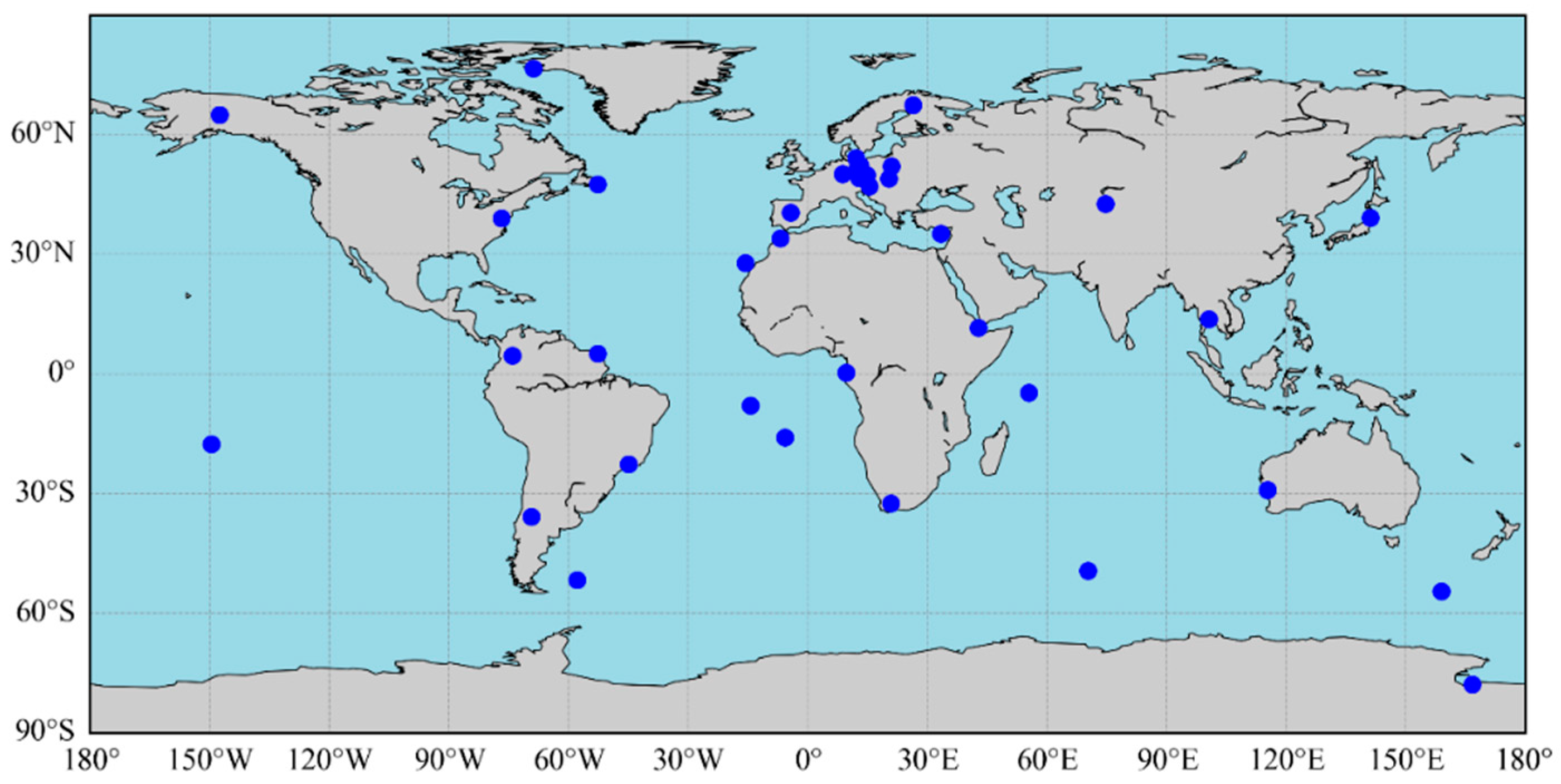
3. Data and Strategy
4. Evaluation of PPP Using Geodetic Receivers
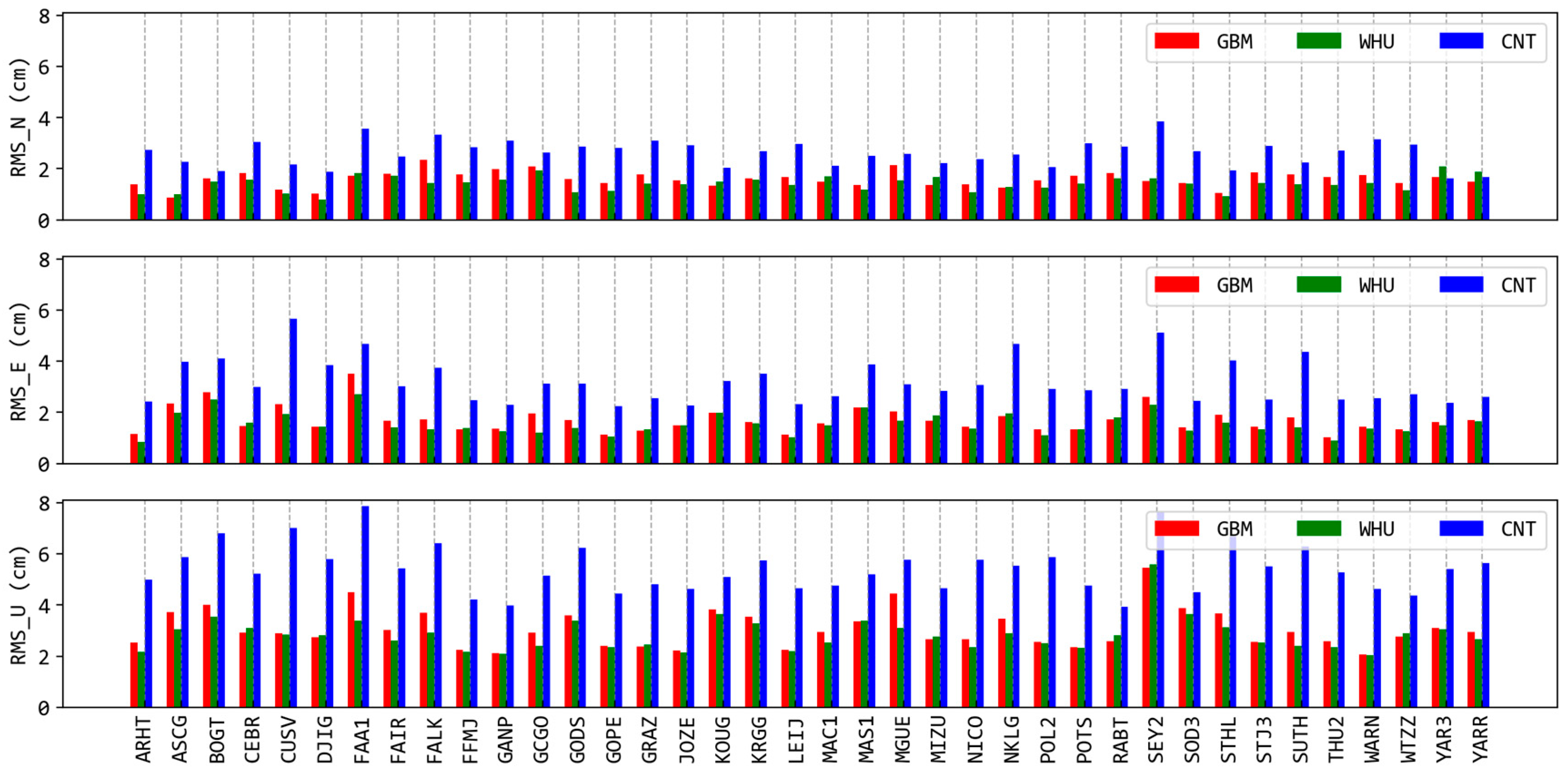
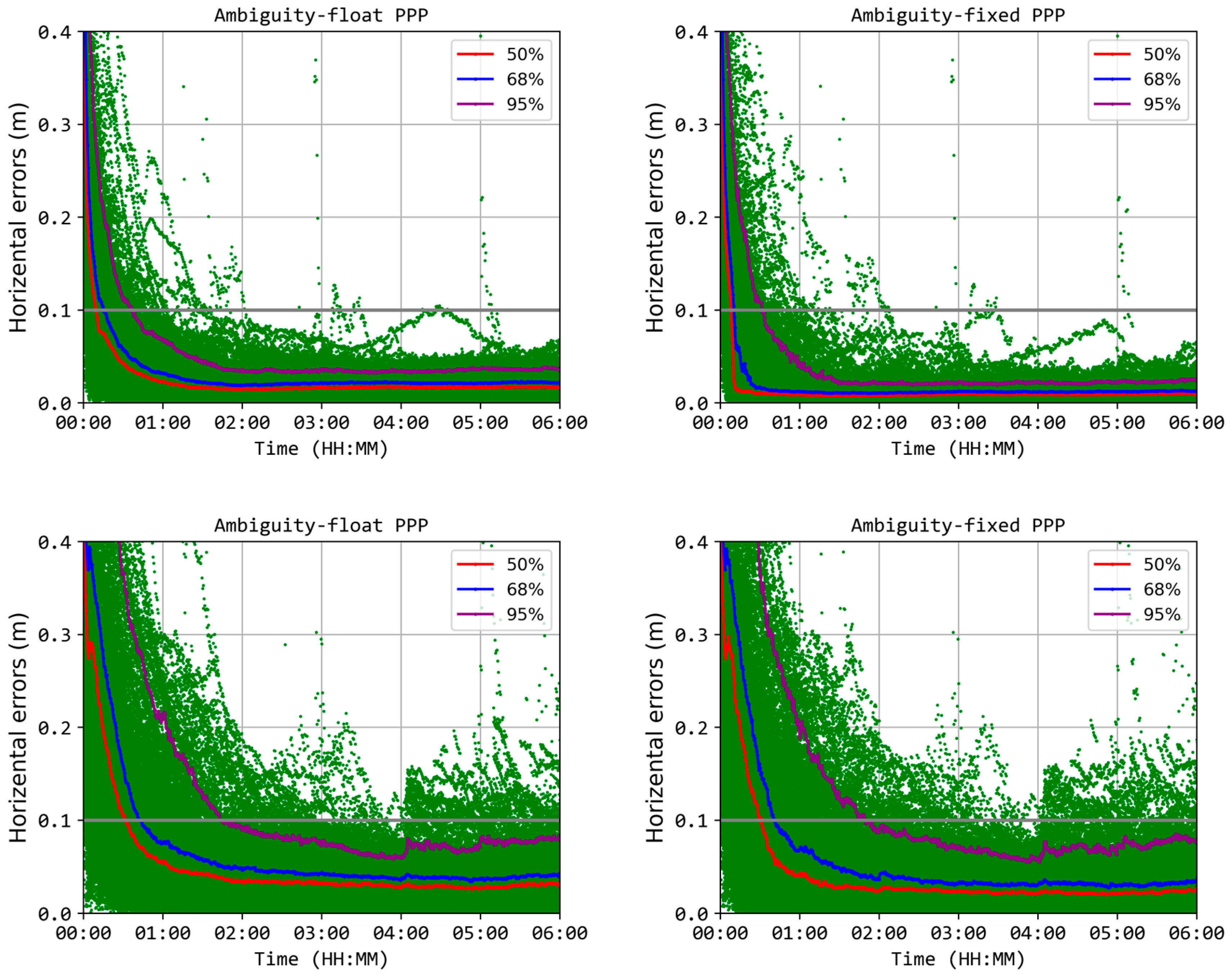
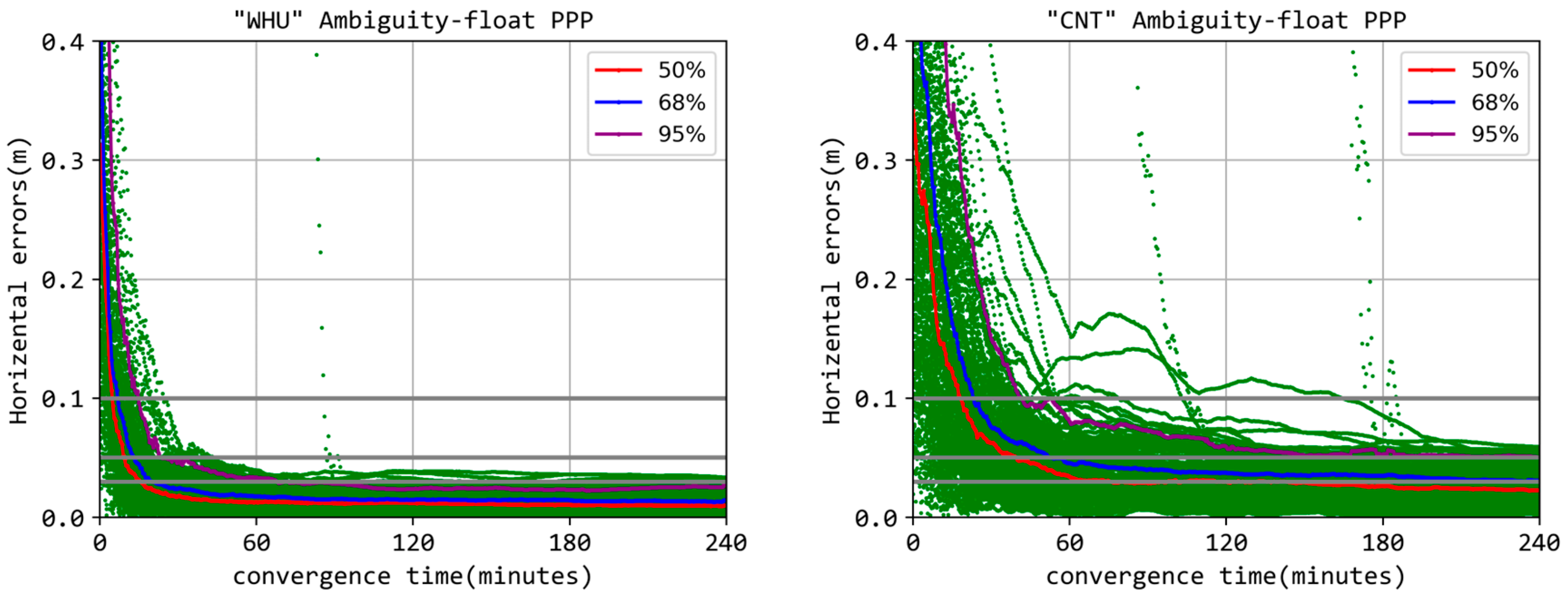
4.1. Multi-GNSS Kinematic Solution
4.2. Multi-GNSS Static Solution
5. Evaluation of PPP Using Low-Cost Receivers
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks. J. Geophys. Res. Soild Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Jin, S.; Su, K. PPP models and performances from single-to quad-frequency BDS observations. Satell. Navig. 2020, 1, 16. [Google Scholar] [CrossRef]
- Zhang, B.; Hou, P.; Zha, J.; Liu, T. PPP–RTK functional models formulated with undifferenced and uncombined GNSS observations. Satell. Navig. 2022, 3, 3. [Google Scholar] [CrossRef]
- Zheng, K.; Liu, K.; Zhang, X.; Wen, G.; Chen, M.; Zeng, X.; Zhao, L.; He, X. First results using high-rate BDS-3 observations: Retrospective real-time analysis of 2021 Mw 7.4 Madoi (Tibet) earthquake. J. Geod. 2022, 96, 51. [Google Scholar] [CrossRef]
- Zheng, K.; Zhang, X.; Li, X.; Li, P.; Sang, J.; Ma, T.; Schuh, H. Capturing coseismic displacement in real time with mixed single- and dual-frequency receivers: Application to the 2018 Mw7.9 Alaska earthquake. GPS Solut. 2019, 23, 9. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in Precise Point Positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Laurichesse, D.; Mercier, F.; Berthias, J.-P.; Broca, P.; Cerri, L. Integer Ambiguity Resolution on Undifferenced GPS Phase Measurements and Its Application to PPP and Satellite Precise Orbit Determination. Navigation 2009, 56, 135–149. [Google Scholar] [CrossRef]
- Melbourne, W.G. The case for ranging in GPS-based geodetic systems. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; pp. 373–386. [Google Scholar]
- Wübbena, G. Software developments for geodetic positioning with GPS using TI-4100 code and carrier measurements. In Proceedings of the First International Symposium on Precise Positioning with the Global Positioning System, Rockville, MD, USA, 15–19 April 1985; Volume 19, pp. 403–412. [Google Scholar]
- Collins, P.; Lahaye, F.; Héroux, P.; Bisnath, S. Precise Point Positioning with Ambiguity Resolution using the Decoupled Clock Model. In Proceedings of the 21st International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2008), Savannah, GA, USA, 16–19 September 2008; pp. 1315–1322. [Google Scholar]
- Geng, J.; Chen, X.; Pan, Y.; Zhao, Q. A modified phase clock/bias model to improve PPP ambiguity resolution at Wuhan University. J. Geod. 2019, 93, 2053–2067. [Google Scholar] [CrossRef]
- Gazzino, C.; Blot, A.; Bernadotte, E.; Jayle, T.; Laymand, M.; Lelarge, N.; Lacabanne, A.; Laurichesse, D. The CNES Solutions for Improving the Positioning Accuracy with Post-Processed Phase Biases, a Snapshot Mode, and High-Frequency Doppler Measurements Embedded in Recent Advances of the PPP-WIZARD Demonstrator. Remote Sens. 2023, 15, 4231. [Google Scholar] [CrossRef]
- Geng, J.; Wen, Q.; Zhang, Q.; Li, G.; Zhang, K. GNSS observable-specific phase biases for all-frequency PPP ambiguity resolution. J. Geod. 2022, 96, 11. [Google Scholar] [CrossRef]
- Su, K.; Jin, S.; Hoque, M.M. Evaluation of ionospheric delay effects on multi-GNSS positioning performance. Remote Sens. 2019, 11, 171. [Google Scholar] [CrossRef]
- Zhang, B.; Zhao, C.; Odolinski, R.; Liu, T. Functional model modification of precise point positioning considering the time-varying code biases of a receiver. Satell. Navig. 2021, 2, 11. [Google Scholar] [CrossRef]
- Shu, B.; Tian, Y.; Qu, X.; Li, P.; Wang, L.; Huang, G.; Du, Y.; Zhang, Q. Estimation of BDS-2/3 phase observable-specific signal bias aided by double-differenced model: An exploration of fast BDS-2/3 real-time PPP. GPS Solut. 2024, 28, 88. [Google Scholar] [CrossRef]
- Zheng, K.; Tan, L.; Liu, K.; Li, P.; Chen, M.; Zeng, X. Multipath mitigation for improving GPS narrow-lane uncalibrated phase delay estimation and speeding up PPP ambiguity resolution. Measurement 2023, 206, 112243. [Google Scholar] [CrossRef]
- Schaer, S. Bias-SINEX Format and Implications for IGS Bias Products; IGS Workshop: Sydney, Australia, 2016; pp. 8–12. [Google Scholar]
- Cao, X.; Yu, X.; Ge, Y.; Liu, T.; Shen, F. BDS-3/GNSS multi-frequency precise point positioning ambiguity resolution using observable-specific signal bias. Measurement 2022, 195, 111134. [Google Scholar] [CrossRef]
- Geng, J.; Yang, S.; Guo, J. Assessing IGS GPS/Galileo/BDS-2/BDS-3 phase bias products with PRIDE PPP-AR. Satell. Navig. 2021, 2, 17. [Google Scholar] [CrossRef]
- Du, S.; Shu, B.; Xie, W.; Huang, G.; Ge, Y.; Li, P. Evaluation of Real-time Precise Point Positioning with Ambiguity Resolution Based on Multi-GNSS OSB Products from CNES. Remote Sens. 2022, 14, 4970. [Google Scholar] [CrossRef]
- Li, B.; Ge, H.; Bu, Y.; Zheng, Y.; Yuan, L. Comprehensive assessment of real-time precise products from IGS analysis centers. Satell. Navig. 2022, 3, 12. [Google Scholar] [CrossRef]
- Gill, M.; Bisnath, S.; Aggrey, J.; Seepersad, G. Precise Point Positioning (PPP) using Low-Cost and Ultra-Low-Cost GNSS Receivers. In Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017), Portland, OR, USA, 25–29 September 2017; pp. 226–236. [Google Scholar]
- Romero-Andrade, R.; Trejo-Soto, M.E.; Vega-Ayala, A.; Hernández-Andrade, D.; Vázquez-Ontiveros, J.R.; Sharma, G. Positioning Evaluation of Single and Dual-Frequency Low-Cost GNSS Receivers Signals Using PPP and Static Relative Methods in Urban Areas. Appl. Sci. 2021, 11, 10642. [Google Scholar] [CrossRef]
- Ogutcu, S.; Alcay, S.; Duman, H.; Ozdemir, B.N.; Konukseven, C. Static and kinematic PPP-AR performance of low-cost GNSS receiver in monitoring displacements. Adv. Space Res. 2023, 72, 4795–4808. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.; Wang, N.; Wang, Z. Real-time GNSS precise point positioning for low-cost smart devices. GPS Solut. 2021, 25, 69. [Google Scholar] [CrossRef]
- Vaclavovic, P.; Dousa, J.; Gyori, G. G-Nut software library—State of development and first results. Acta Geodyn. Geomater. 2013, 10, 431–436. [Google Scholar] [CrossRef]
- Vaclavovic, P.; Dousa, J. Backward smoothing for precise GNSS applications. Adv. Space Res. 2015, 56, 1627–1634. [Google Scholar] [CrossRef]
- Teunnissen, P.J.G. The least-square ambiguity decorrelation adjustment: A method for fast GPS integer ambiguity estimation. J. Geod. 1995, 70, 65–82. [Google Scholar] [CrossRef]
- Saastamoinen, J. Contributions to the Theory of Atmospheric Refraction. J. Geod. 1972, 105, 279–298. [Google Scholar] [CrossRef]
- Boehm, J.; Niell, A.E.; Tregoning, P.; Schuh, H. Global mapping function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 25, L07304. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions; IERS Tech. Note 36; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Labels | Type | Systems | Signals Used for PPP |
|---|---|---|---|
| CNT | Real-time | GPS Galileo Glonass BDS-2/BDS-3 | GPS:C1C/C2W/L1C/L2W Galileo:C1C/C5Q/L1C/L5Q BDS:C2I/C6I/L2I/L6I |
| WHU | Rapid | GPS:C1W/C2W/L1C/L2W Galileo:C1C/C5Q/L1C/L5Q C1X/C5X/L1X/L5X BDS:C2I/C6I/L2I/L6I | |
| GBM | Rapid | GPS:C1W/C2W/L1C/L2W Galileo:C1X/C5X/L1X/L5X BDS:C2I/C6I/L2I/L6I |
| Parameter | Configurations |
|---|---|
| Observations Frequency | GPS:L1/L2 Galileo:E1/E5a BDS-2/BDS-3:B2I/B6I |
| Estimator | Extended Kalman filter |
| observation noise | Pseudorange: 0.3 m; carrier-phase: 0.003 m |
| Cutoff elevation | 7° |
| Ionosphere delays | ionosphere-free combination |
| Troposphere delays | Saastamoinen [30] + Global Mapping Function [31] |
| Weighting strategy | Elevation-dependent weighting |
| Antenna phase centers | Igs20.atx |
| Tidal displacements | Corrected [32] |
| Relativistic effect | Corrected |
| Satellite attitude | Nominal |
| Receiver clocks | One for each GNSS as a white-noise-like parameter; ISB estimated for the BDS-2 and BDS-3 with the BDS-2 down weighting |
| System | Product | Float | Fixed | Float to Fixed Improvements | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| N | E | U | N | E | U | N | E | U | ||
| GPS | GBM | 1.4 | 1.9 | 3.4 | 1.1 | 1.3 | 2.9 | 21% | 32% | 15% |
| WHU | 1.3 | 1.8 | 3 | 1 | 1.2 | 2.6 | 23% | 33% | 13% | |
| CNT | 2.3 | 3.1 | 5.1 | 2.1 | 2.7 | 4.8 | 9% | 13% | 6% | |
| BDS | GBM | 3.0 | 4.0 | 5.7 | 2.9 | 3.9 | 6 | 3% | 3% | −5% |
| WHU | 3.0 | 3.9 | 5 | 2.8 | 3.7 | 5.4 | 7% | 5% | −8% | |
| CNT | 3.9 | 5.1 | 6.7 | 4 | 5.3 | 6.9 | −3% | −4% | −3% | |
| GPS+BDS | GBM | 1.7 | 2 | 3.5 | 1.3 | 1.4 | 3.3 | 24% | 30% | 6% |
| WHU | 1.5 | 1.7 | 3 | 1.1 | 1.1 | 2.9 | 27% | 35% | 3% | |
| CNT | 3.4 | 4.5 | 6.9 | 3.4 | 4.4 | 6.9 | 0% | 2% | 0% | |
| GPS+GAL | GBM | 1.6 | 1.7 | 3 | 1.1 | 1 | 2.9 | 31% | 41% | 3% |
| WHU | 1.4 | 1.5 | 2.8 | 0.9 | 0.9 | 2.6 | 36% | 40% | 7% | |
| CNT | 2.6 | 3.2 | 5.4 | 2.4 | 2.7 | 5.2 | 8% | 16% | 4% | |
| GPS+GAL+BDS | GBM | 1.7 | 1.9 | 3.1 | 1.3 | 1.2 | 3 | 24% | 37% | 3% |
| WHU | 1.5 | 1.6 | 2.8 | 1.1 | 1 | 2.7 | 27% | 38% | 4% | |
| CNT | 3 | 3.6 | 5.7 | 2.8 | 3.3 | 5.6 | 7% | 8% | 2% | |
| Ambiguity-Float PPP with 10 cm Accuracy Metric | Ambiguity-Fixed PPP with 10 cm Accuracy Metric | Ambiguity-Fixed PPP with TTFF Metric | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Single-GNSS | Dual-GNSS | Triple-GNSS | Single-GNSS | Dual-GNSS | Triple-GNSS | Single-GNSS | Dual-GNSS | Triple-GNSS | |
| WHU | 38.2 | 18.5 | 14.8 | 33.3 | 15.7 | 13.1 | 21 | 7.8 | 5 |
| GBM | 38.3 | 20.5 | 16.7 | 31.9 | 17.1 | 15.6 | 18.6 | 7.5 | 6 |
| CNT | 50.4 | 42.6 | 37.5 | 48.3 | 43.1 | 36.5 | 22.6 | 8.4 | 6.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, M.; Zhao, L.; Zhai, W.; Lv, Y.; Jin, S. Assessment of the Real-Time and Rapid Precise Point Positioning Performance Using Geodetic and Low-Cost GNSS Receivers. Remote Sens. 2024, 16, 1434. https://doi.org/10.3390/rs16081434
Chen M, Zhao L, Zhai W, Lv Y, Jin S. Assessment of the Real-Time and Rapid Precise Point Positioning Performance Using Geodetic and Low-Cost GNSS Receivers. Remote Sensing. 2024; 16(8):1434. https://doi.org/10.3390/rs16081434
Chicago/Turabian StyleChen, Mengmeng, Lewen Zhao, Wei Zhai, Yifei Lv, and Shuanggen Jin. 2024. "Assessment of the Real-Time and Rapid Precise Point Positioning Performance Using Geodetic and Low-Cost GNSS Receivers" Remote Sensing 16, no. 8: 1434. https://doi.org/10.3390/rs16081434
APA StyleChen, M., Zhao, L., Zhai, W., Lv, Y., & Jin, S. (2024). Assessment of the Real-Time and Rapid Precise Point Positioning Performance Using Geodetic and Low-Cost GNSS Receivers. Remote Sensing, 16(8), 1434. https://doi.org/10.3390/rs16081434