
Near-Surface Wind Profiling in a Utility-Scale Onshore Wind Farm Using Scanning Doppler Lidar: Quality Control and Validation

 ,
,
Abstract

1. Introduction
2. Data and Methods
2.1. Experiment Site and Instruments
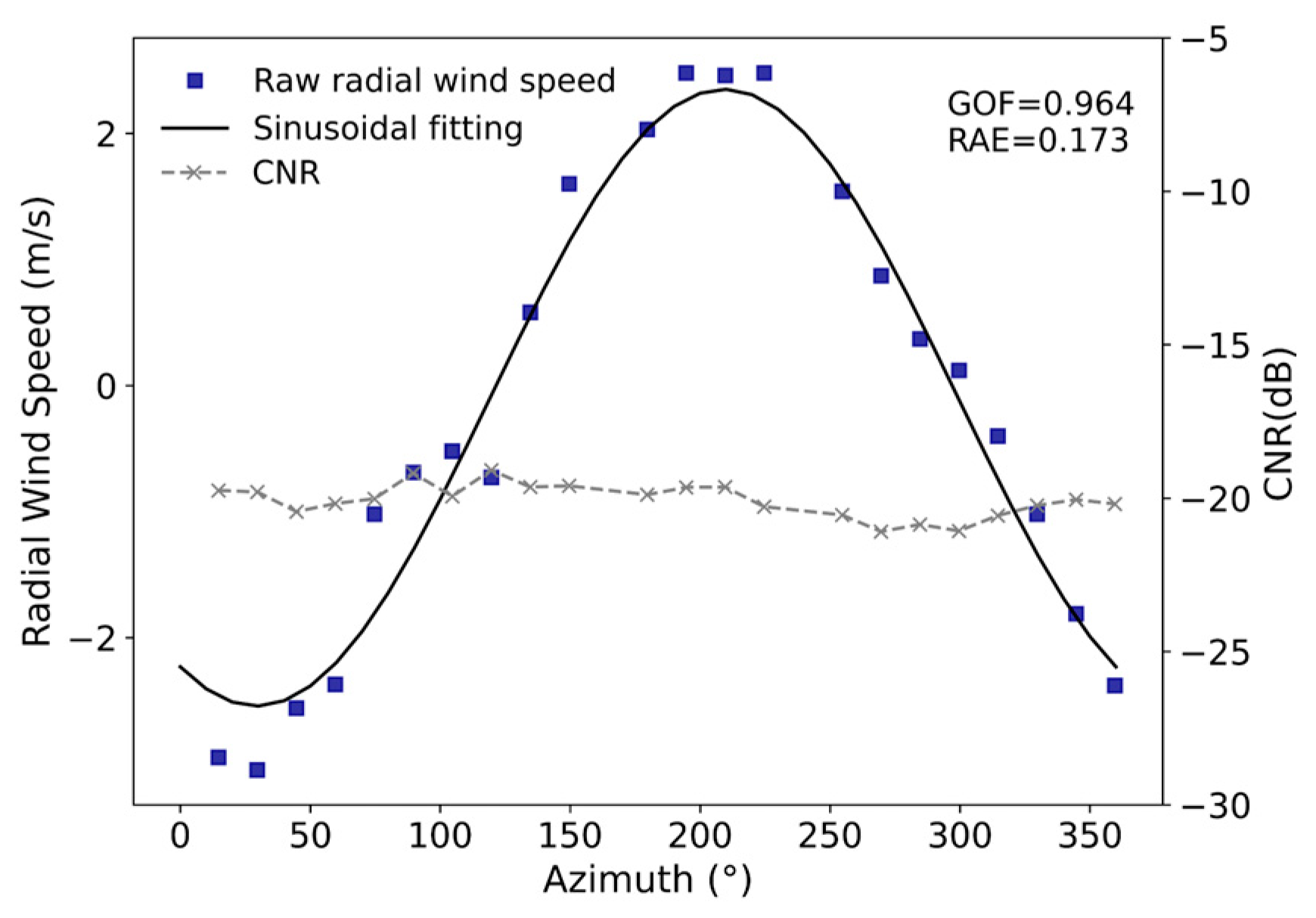
2.2. Inversion Method
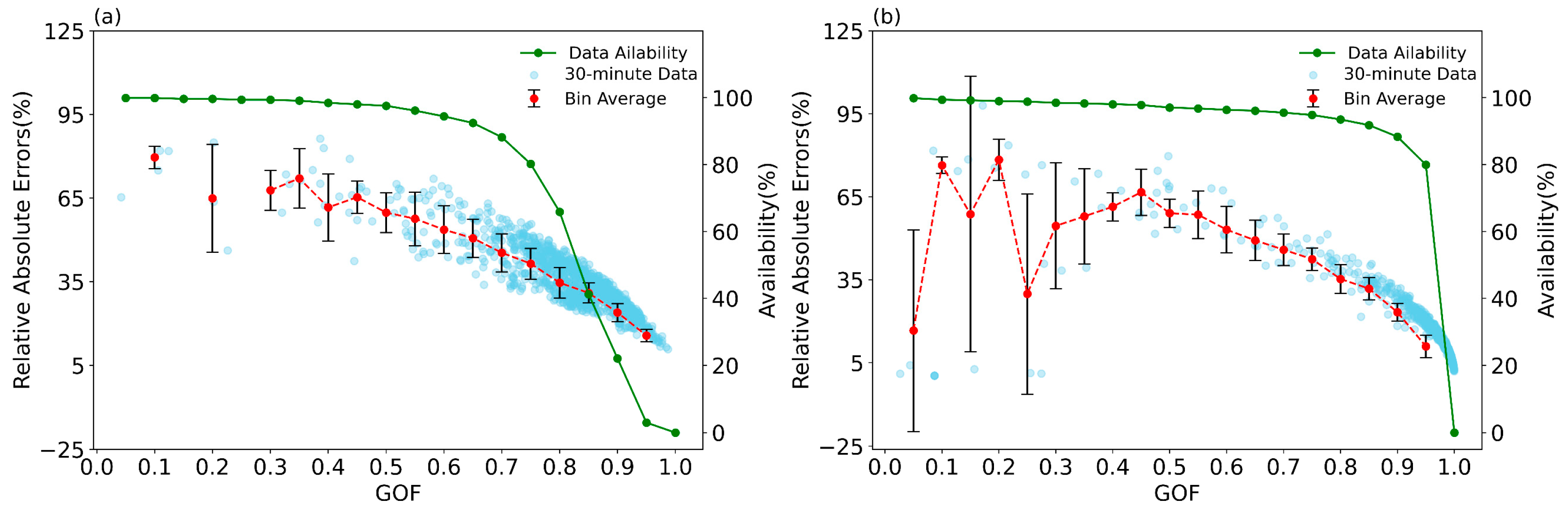
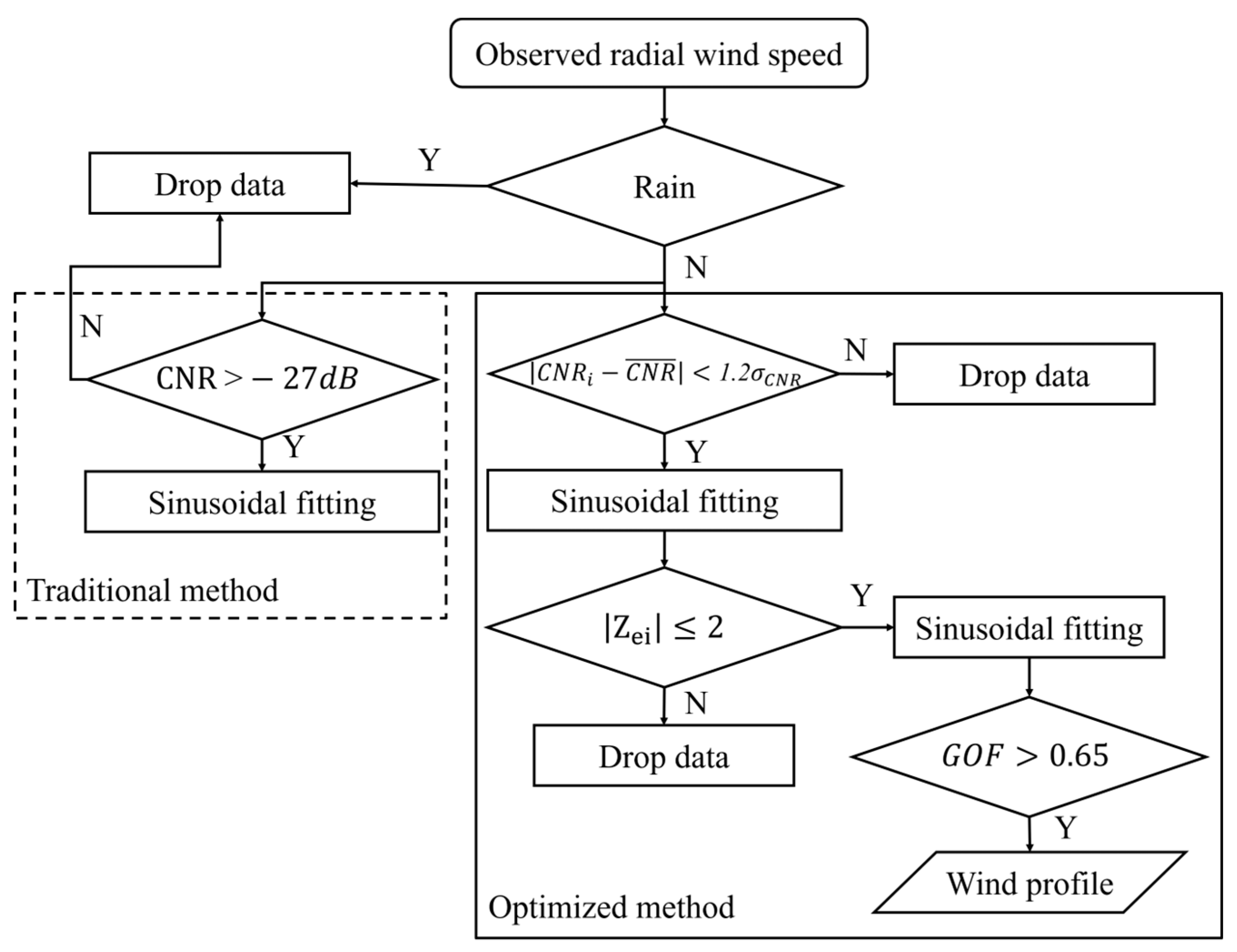
2.3. Optimize the Inversion Results
2.4. Statisitc Calculation
2.5. Kolmogorov–Smirnov (K-S) Test
3. Results
3.1. Wind Condition during the Experiment
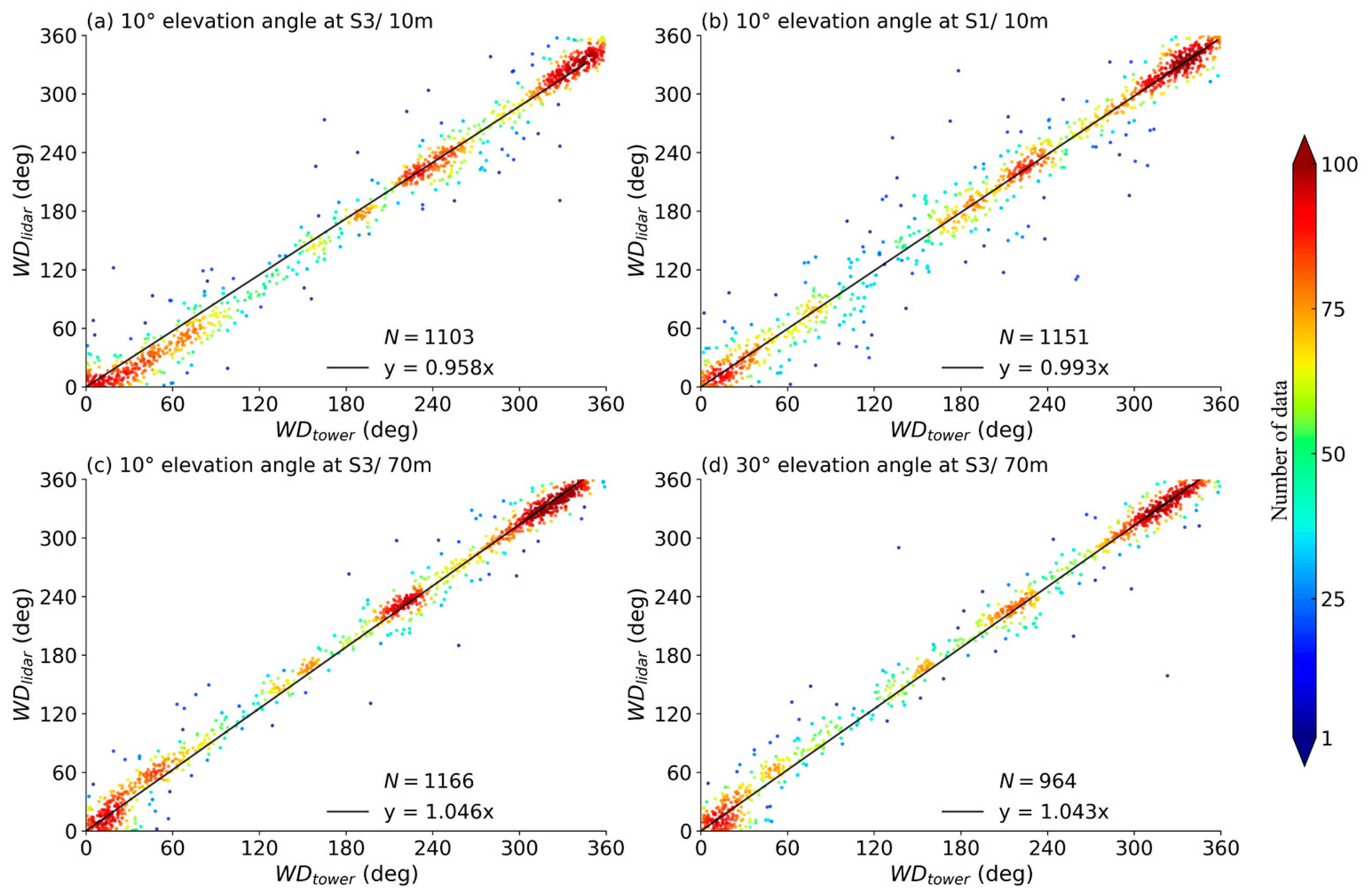
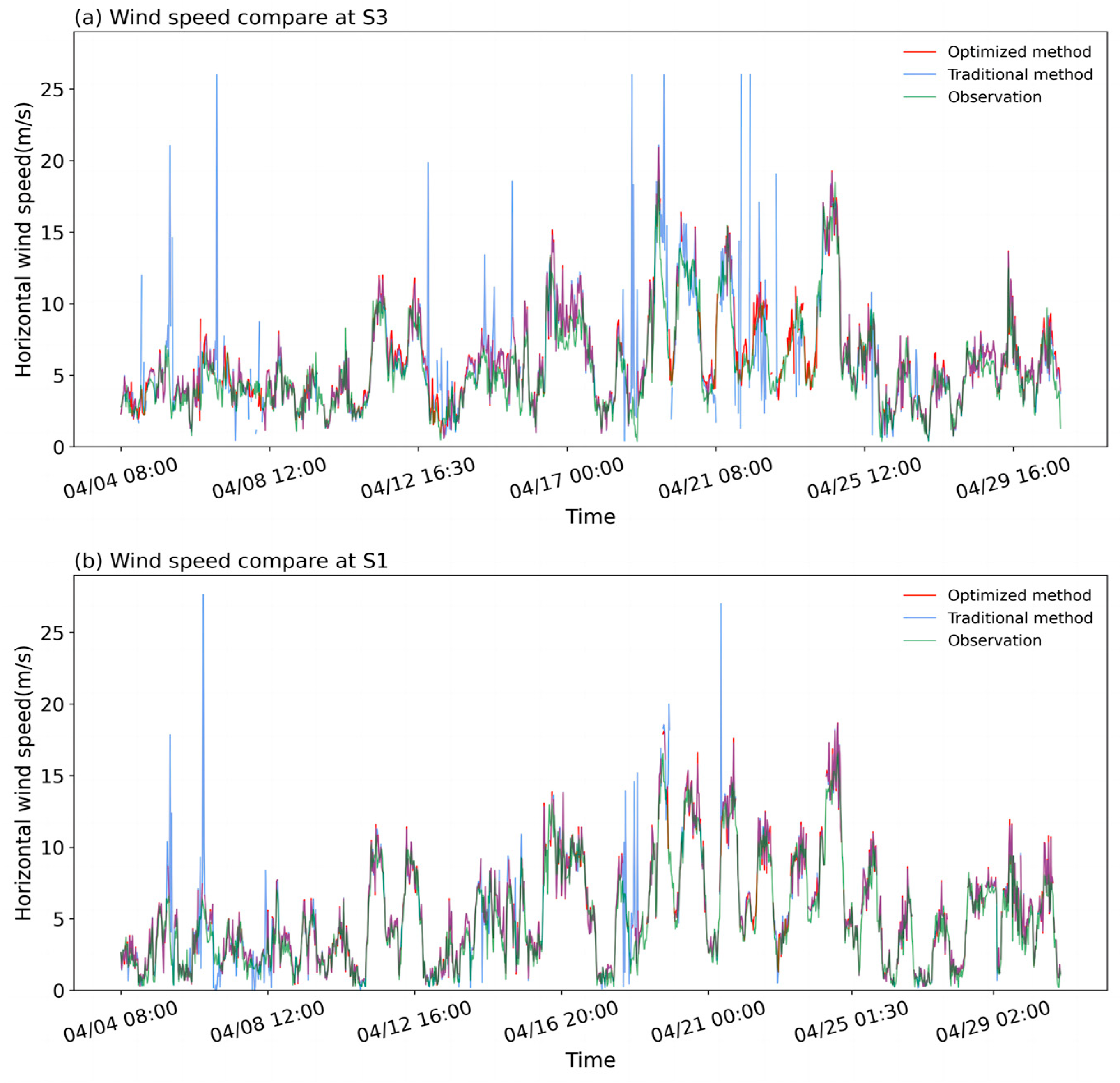
3.2. Validation of the Derived Wind
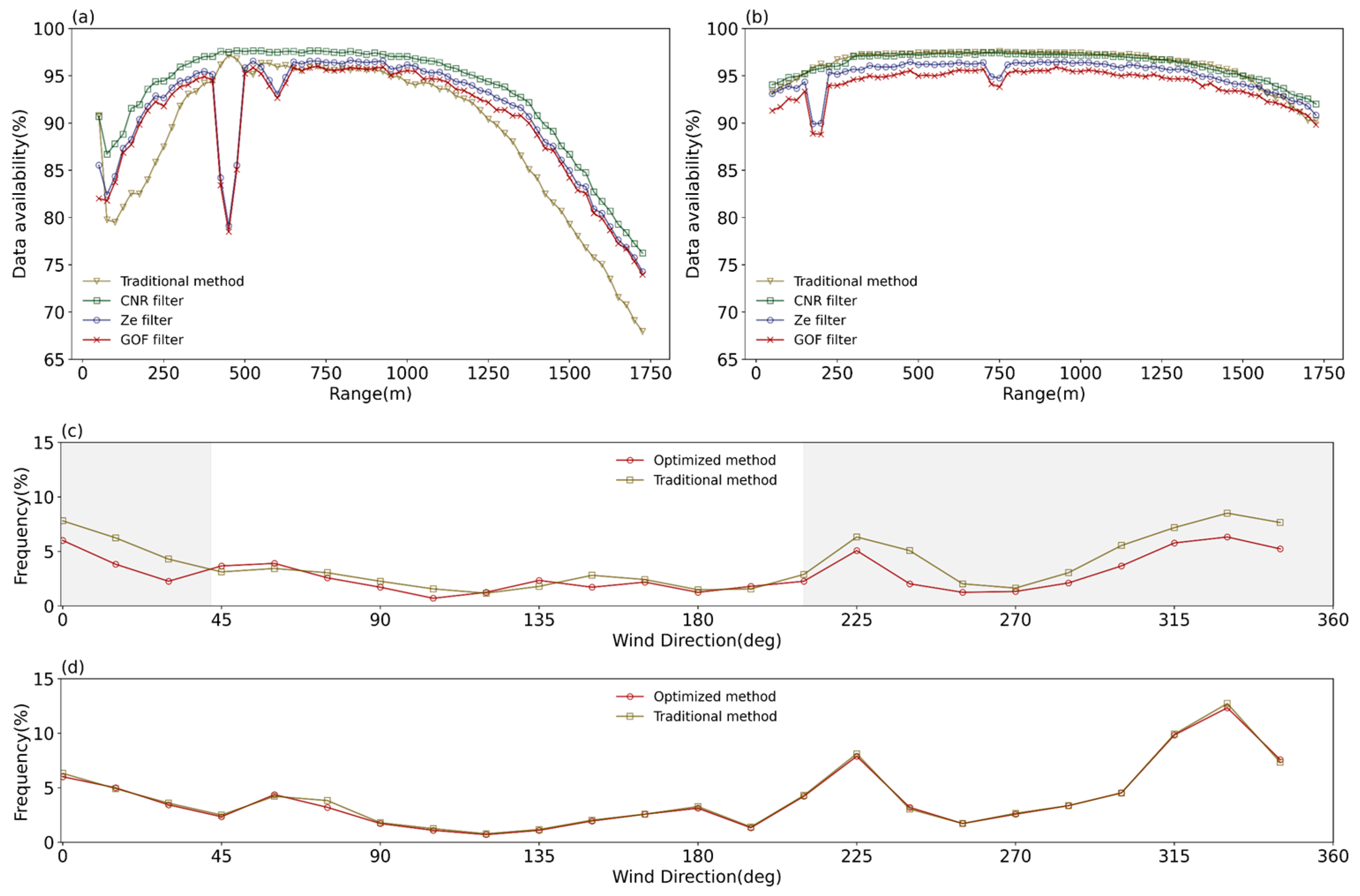
3.2.1. Different Quality Control Methods
3.2.2. Different Weather Conditions
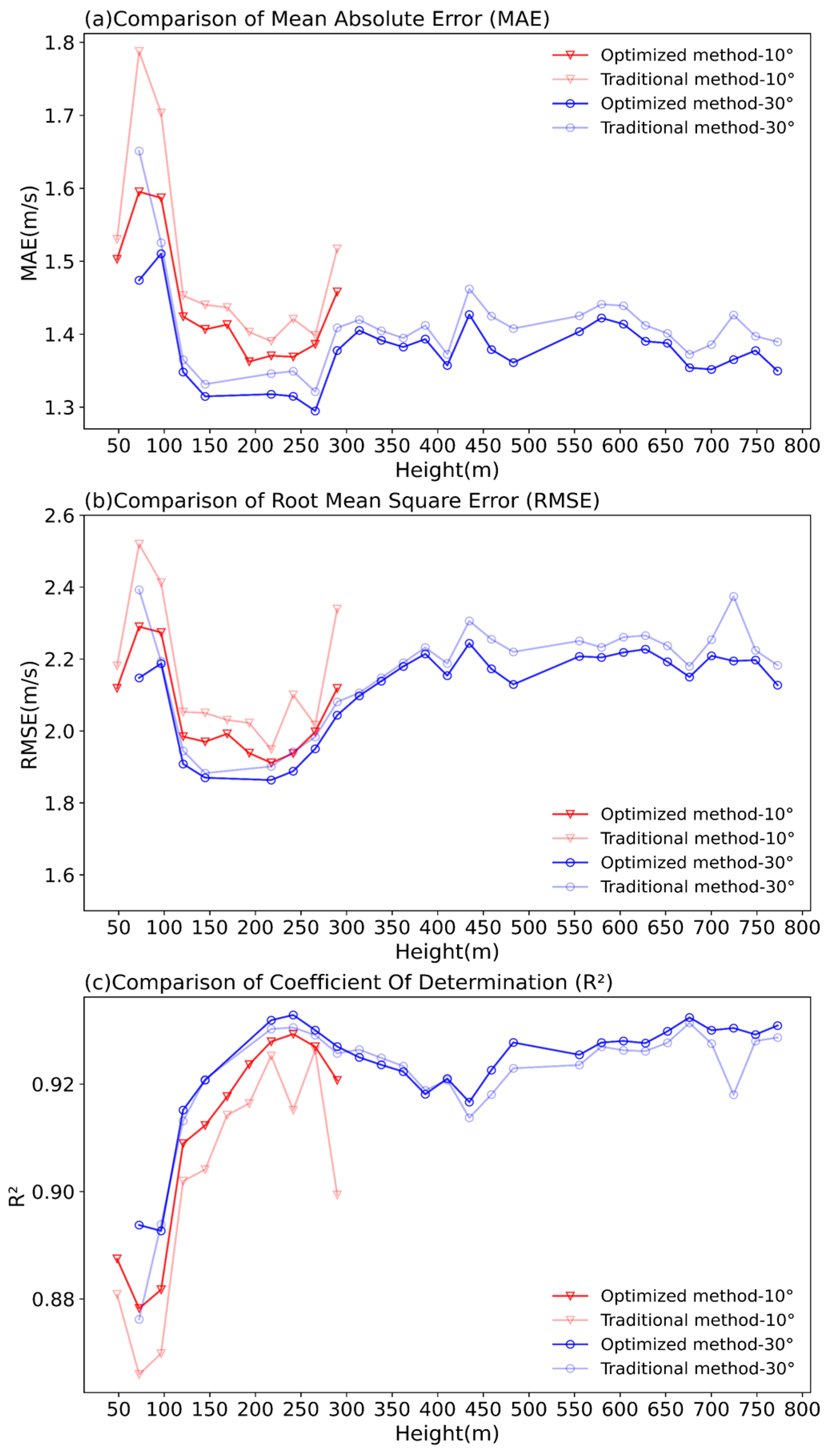
3.2.3. Validation of Wind Profiles
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Lidar | Light detection and ranging |
| CNR | Carrier-to-noise ratio |
| VAD | Velocity-azimuth display |
| DBS | Doppler beam swinging |
| VVP | Volume–velocity processing |
| PPI | Plan-position indicator |
| RHI | Range-height indicator |
| CI | Confidence Index |
| GOF | Goodness of Fit |
| RAE | Relative absolute error |
| Ze | Standardized residual |
| AGL | Above the ground level |
| R2 | Coefficient of determination |
| RMSE | Root mean square error |
| MAE | Mean absolute error |
| CSI | Clear-sky index |
| LDR | Longwave downward radiation |
References
- Balat, M. A Review of Modern Wind Turbine Technology. Energy Sources Part A Recovery Util. Environ. Eff. 2009, 31, 1561–1572. [Google Scholar] [CrossRef]
- Roga, S.; Bardhan, S.; Kumar, Y.; Dubey, S.K. Recent technology and challenges of wind energy generation: A review. Sustain. Energy Technol. Assess 2022, 52, 102239. [Google Scholar] [CrossRef]
- Politis, E.S.; Prospathopoulos, J.; Cabezon, D.; Hansen, K.S.; Chaviaropoulos, P.K.; Barthelmie, R.J. Modeling wake effects in large wind farms in complex terrain: The problem, the methods and the issues. Wind Energy 2012, 15, 161–182. [Google Scholar] [CrossRef]
- Barthelmie, R.J.; Hansen, K.; Frandsen, S.T.; Rathmann, O.; Schepers, J.G.; Schlez, W.; Phillips, J.; Rados, K.; Zervos, A.; Politis, E.S.; et al. Modelling and measuring flow and wind turbine wakes in large wind farms offshore. Wind Energy 2009, 12, 431–444. [Google Scholar] [CrossRef]
- Smith, C.M.; Barthelmie, R.J.; Pryor, S.C. In situ observations of the influence of a large onshore wind farm on near-surface temperature, turbulence intensity and wind speed profiles. Environ. Res. Lett. 2013, 8, 1–9. [Google Scholar] [CrossRef]
- Li, Q.; Gulgina, H.; Kong, T.; Liu, W.; Gong, X.; Hu, Y.; Liu, Z. Quality Control and Effect Evaluation of Wind Tower Data in China. J. Desert Oasis Meteorol. 2024, 18, 141–148. [Google Scholar]
- Gryning, S.; Batchvarova, E.; Brümmer, B.; Jørgensen, H.; Larsen, S. On the extension of the wind profile over homogeneous terrain beyond the surface boundary layer. Bound. -Layer Meteorol. 2007, 124, 251–268. [Google Scholar] [CrossRef]
- Cao, J.; Xue, W.; Mao, R.; Xin, D. Wind power in forested regions: Power law extrapolation vs. lidar observation. J. Wind. Eng. Ind. Aerodyn. J. Int. Assoc. Wind. Eng. 2023, 232, 105281. [Google Scholar] [CrossRef]
- Shimada, S.; Goit, J.P.; Ohsawa, T.; Kogaki, T.; Nakamura, S. Coastal Wind Measurements Using a Single Scanning Lidar. Remote Sens. 2020, 12, 1347. [Google Scholar] [CrossRef]
- Theuer, F.; van Dooren, M.F.; von Bremen, L.; Kühn, M. Lidar-based minute-scale offshore wind speed forecasts analysed under different atmospheric conditions. Meteorol. Z. 2022, 31, 13–29. [Google Scholar] [CrossRef]
- Emeis, S.; Harris, M.; Banta, R.M. Boundary-layer anemometry by optical remote sensing for wind energy applications. Meteorol. Z. 2007, 16, 337–347. [Google Scholar] [CrossRef] [PubMed]
- Bianco, L.; Wilczak, J.M.; White, A.B. Convective Boundary Layer Depth Estimation from Wind Profilers Statistical Comparison between an Automated Algorithm and Expert Estimations. J. Atmos. Ocean. Technol. 2008, 25, 1397–1413. [Google Scholar] [CrossRef]
- Srinivasulu, P.; Yasodha, P.; Kamaraj, P.; Rao, T.N.; Jayaraman, A.; Reddy, S.N.; Satyanarayana, S. 1280-MHz Active Array Radar Wind Profiler for Lower Atmosphere System Description and Data Validation. J. Atmos. Ocean. Technol. 2012, 29, 1455–1470. [Google Scholar] [CrossRef]
- Vakkari, V.; O’Connor, E.J.; Nisantzi, A.; Mamouri, R.E.; Hadjimitsis, D.G. Low-level mixing height detection in coastal locations with a scanning Doppler lidar. Atmos. Meas. Tech. 2015, 8, 1875–1885. [Google Scholar] [CrossRef]
- Browning, K.A.; Wexler, R. The determination of kinematic properties of a wind field using Doppler radar. J. Appl. Meteorol. 1968, 7, 105–113. [Google Scholar] [CrossRef]
- Gao, H.; Shen, C.; Zhou, Y.; Wang, X.; Chan, P.; Hon, K.; Zhou, D.; Li, J. A Spatio-Temporal Neural Network for Fine-Scale Wind Field Nowcasting Based on Lidar Observation. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2022, 15, 5596–5606. [Google Scholar] [CrossRef]
- Baidar, S.; Wagner, T.J.; Turner, D.D.; Brewer, W.A. Using optimal estimation to retrieve winds from velocity-azimuth display (VAD) scans by a Doppler lidar. Atmos. Meas. Tech. 2023, 16, 3715–3726. [Google Scholar] [CrossRef]
- Dong, D.; Yang, S.; Weng, N.; Zhang, G.; Huang, J. Analysis of Observation Performance of a Mobile Coherent Doppler Wind Lidar Using DBS Scanning Mode. J. Phys. Conf. Ser. 2021, 1739, 12048. [Google Scholar] [CrossRef]
- Smith, D.A.; Harris, M.; Coffey, A.S.; Mikkelsen, T.; Jørgensen, H.E.; Mann, J.; Danielian, R. Wind lidar evaluation at the Danish wind test site in Høvsøre. Wind Energy 2006, 9, 87–93. [Google Scholar] [CrossRef]
- Päschke, E.; Leinweber, R.; Lehmann, V. An assessment of the performance of a 1.5 μm Doppler lidar for operational vertical wind profiling based on a 1-year trial. Atmos. Meas. Tech. 2015, 8, 2251–2266. [Google Scholar] [CrossRef]
- Lundquist, J.K.; Churchfield, M.J.; Lee, S.; Clifton, A. Quantifying error of lidar and sodar Doppler beam swinging measurements of wind turbine wakes using computational fluid dynamics. Atmos. Meas. Tech. 2015, 8, 907–920. [Google Scholar] [CrossRef]
- Lang, S.; McKeogh, E. LIDAR and SODAR Measurements of Wind Speed and Direction in Upland Terrain for Wind Energy Purposes. Remote Sens. 2011, 3, 1871–1901. [Google Scholar] [CrossRef]
- Xia, X. Effects of Wind Farms on Atmospheric Boundary Layer Meteorological Elements and Turbulent Fluxes in Spring; D. Northwest Institute of Eco-Environment and Resources, Chinese Academy of Sciences: Beijing, China, 2021. [Google Scholar]
- Weitkamp, C. Lidar, Range-Resolved Optical Remote Sensing of the Atmosphere; Springer: New York, NY, USA, 2005. [Google Scholar]
- Holleman, I. Quality Control and Verification of Weather Radar Wind Profiles. J. Atmos. Ocean. Technol. 2005, 22, 1541–1550. [Google Scholar] [CrossRef]
- Vanderwende, B.J.; Lundquist, J.K.; Rhodes, M.E.; Takle, E.S.; Irvin, S.L. Observing and Simulating the Summertime Low-Level Jet in Central Iowa. Mon. Weather Rev. 2015, 143, 2319–2336. [Google Scholar] [CrossRef]
- Debnath, M.; Iungo, G.V.; Brewer, W.A.; Choukulkar, A.; Delgado, R.; Gunter, S.; Lundquist, J.K.; Schroeder, J.L.; Wilczak, J.M.; Wolfe, D.; et al. Assessment of virtual towers performed with scanning wind lidars and Ka-band radars during the XPIA experiment. Atmos. Meas. Tech. 2017, 10, 1215–1227. [Google Scholar] [CrossRef]
- Bodini, N.; Zardi, D.; Lundquist, J.K. Three-dimensional structure of wind turbine wakes as measured by scanning lidar. Atmos. Meas. Tech. 2017, 10, 2881–2896. [Google Scholar] [CrossRef]
- Costa Rocha, P.A.; de Sousa, R.C.; de Andrade, C.F.; Da Silva, M.E.V. Comparison of seven numerical methods for determining Weibull parameters for wind energy generation in the northeast region of Brazil. Appl. Energy 2012, 89, 395–400. [Google Scholar] [CrossRef]
- Singh, K.; Bule, L.; Khan, M.; Ahmed, M.R. Wind energy resource assessment for Vanuatu with accurate estimation of Weibull parameters. Energy Explor. Exploit. 2019, 37, 1804–1832. [Google Scholar] [CrossRef]
- Jiménez, P.A.; Dudhia, J. On the Ability of the WRF Model to Reproduce the Surface Wind Direction over Complex Terrain. J. Appl. Meteorol. Climatol. 2013, 52, 1610–1617. [Google Scholar] [CrossRef]
- Xing, J.; Shi, J.; Lei, Y.; Huang, X.-Y.; Liu, Z. Evaluation of HY-2A Scatterometer Wind Vectors Using Data from Buoys, ERA-Interim and ASCAT during 2012–2014. Remote Sens. 2016, 8, 390. [Google Scholar] [CrossRef]
- Wang, H.; Barthelmie, R.J.; Clifton, A.; Pryor, S.C. Wind Measurements from Arc Scans with Doppler Wind Lidar. J. Atmos. Ocean. Technol. 2015, 32, 2024–2040. [Google Scholar] [CrossRef]
- Beck, H.; Kühn, M. Dynamic Data Filtering of Long-Range Doppler LiDAR Wind Speed Measurements. Remote Sens. 2017, 9, 561. [Google Scholar] [CrossRef]
- Wandinger, U. Introduction to Lidar. In Lidar: Range-Resolved Optical Remote Sensing of the Atmosphere; Weitkamp, C., Ed.; Springer: New York, NY, USA, 2005; pp. 1–18. [Google Scholar]
- Marty, C.; Philipona, R. The clear-sky index to separate clear-sky from cloudy-sky situations in climate research. Geophys. Res. Lett. 2000, 27, 2649–2652. [Google Scholar] [CrossRef]
- Dürr, B.; Philipona, R. Automatic cloud amount detection by surface longwave downward radiation measurements. J. Geophys. Res. Atmos. 2004, 109, D05201. [Google Scholar] [CrossRef]
- Gueymard, C.A.; Bright, J.M.; Lingfors, D.; Habte, A.; Sengupta, M. A posteriori clear-sky identification methods in solar irradiance time series: Review and preliminary validation using sky imagers. Renew. Sustain. Energy Rev. 2019, 109, 412–427. [Google Scholar] [CrossRef]
- Utrillas, M.P.; Marín, M.J.; Estellés, V.; Marcos, C.; Freile, M.D.; Gómez-Amo, J.L.; Martínez-Lozano, J.A. Comparison of Cloud Amounts Retrieved with Three Automatic Methods and Visual Observations. Atmosphere 2022, 13, 937. [Google Scholar] [CrossRef]
- Gryning, S.; Floors, R.; Peña, A.; Batchvarova, E.; Brümmer, B. Weibull Wind-Speed Distribution Parameters Derived from a Combination of Wind-Lidar and Tall-Mast Measurements Over Land, Coastal and Marine Sites. Bound. Layer Meteorol. 2016, 159, 329–348. [Google Scholar] [CrossRef]
- Gryning, S.; Floors, R. Carrier-to-Noise-Threshold Filtering on off-Shore Wind Lidar Measurements. Sensors 2019, 19, 592. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elevation Angle | Site/Height | MAE (m/s) | RMSE (m/s) | R2 | Significance |
|---|---|---|---|---|---|
| 10° | S1/10 m | 0.748 | 1.029 | 0.965 | |
| 0.859 | 1.433 | 0.934 | |||
| S3/10 m | 0.927 | 1.239 | 0.932 | * | |
| 1.231 | 2.116 | 0.826 | |||
| S3/70 m | 0.771 | 1.102 | 0.958 | * | |
| 1.023 | 1.470 | 0.926 | |||
| 30° | S3/70 m | 0.903 | 1.210 | 0.954 | ** |
| 1.326 | 2.253 | 0.838 |
| Elevation Angle | Site/Height | MAE (°) | RMSE (°) | R2 | Significance |
|---|---|---|---|---|---|
| 10° | S1/10 m | 11.323 | 19.168 | 0.987 | |
| 13.744 | 25.392 | 0.977 | |||
| S3/10 m | 14.715 | 19.242 | 0.992 | * | |
| 18.272 | 27.453 | 0.978 | |||
| S3/70 m | 13.714 | 16.255 | 0.995 | * | |
| 16.075 | 20.840 | 0.983 | |||
| 30° | S3/70 m | 13.731 | 17.626 | 0.993 | * |
| 18.419 | 26.891 | 0.978 |
| Condition | Number | R2 | RMSE (m/s) | MAE (m/s) | Significance | |
|---|---|---|---|---|---|---|
| Cloudy period | Daytime | 168 | 0.925 | 1.734 | 1.358 | * |
| 197 | 0.813 | 2.646 | 1.699 | |||
| Nighttime | 118 | 0.932 | 1.275 | 0.978 | ||
| 134 | 0.905 | 1.585 | 1.130 | |||
| Clear-sky period | Daytime | 381 | 0.927 | 1.294 | 0.987 | * |
| 411 | 0.845 | 2.031 | 1.222 | |||
| Nighttime | 433 | 0.918 | 0.909 | 0.699 | ||
| 388 | 0.889 | 1.096 | 0.765 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, T.; Yu, Y.; Dong, L.; Zhao, G.; Zhang, T.; Wang, X.; Zhao, S. Near-Surface Wind Profiling in a Utility-Scale Onshore Wind Farm Using Scanning Doppler Lidar: Quality Control and Validation. Remote Sens. 2024, 16, 989. https://doi.org/10.3390/rs16060989
Ma T, Yu Y, Dong L, Zhao G, Zhang T, Wang X, Zhao S. Near-Surface Wind Profiling in a Utility-Scale Onshore Wind Farm Using Scanning Doppler Lidar: Quality Control and Validation. Remote Sensing. 2024; 16(6):989. https://doi.org/10.3390/rs16060989
Chicago/Turabian StyleMa, Teng, Ye Yu, Longxiang Dong, Guo Zhao, Tong Zhang, Xuewei Wang, and Suping Zhao. 2024. "Near-Surface Wind Profiling in a Utility-Scale Onshore Wind Farm Using Scanning Doppler Lidar: Quality Control and Validation" Remote Sensing 16, no. 6: 989. https://doi.org/10.3390/rs16060989
APA StyleMa, T., Yu, Y., Dong, L., Zhao, G., Zhang, T., Wang, X., & Zhao, S. (2024). Near-Surface Wind Profiling in a Utility-Scale Onshore Wind Farm Using Scanning Doppler Lidar: Quality Control and Validation. Remote Sensing, 16(6), 989. https://doi.org/10.3390/rs16060989