
First Release of the Optimal Cloud Analysis Climate Data Record from the EUMETSAT SEVIRI Measurements 2004–2019

 , , and
, , and
Abstract
1. Introduction
2. Materials and Methods
2.1. Brief Description of the OCA Algorithm
2.2. The Input Data for the Reprocessing
2.2.1. SEVIRI Data
2.2.2. Meteorological Data and RTTOV LUTs
2.2.3. Cloud Mask
2.2.4. Surface Properties
3. The OCA CDR
3.1. Consistency of the OCA CDR Time Series
3.2. Monthly Cloud Properties
3.3. Geographical Distribution of Cloud Parameters
4. Validation against Other Independent Datasets
4.1. The Datasets Used for Validation
4.1.1. DARDAR
4.1.2. CALIPSO L3 GEWEX Cloud-Top Product
4.1.3. CLAAS-3
4.1.4. MODIS L3
4.2. Strategy to Compare the OCA CDR
4.2.1. Comparison against A-Train CloudSat and CALIPSO Products
4.2.2. Comparison against MODIS and CLAAS-3
5. Comparison against Reference Datasets
5.1. OCA versus DARDAR
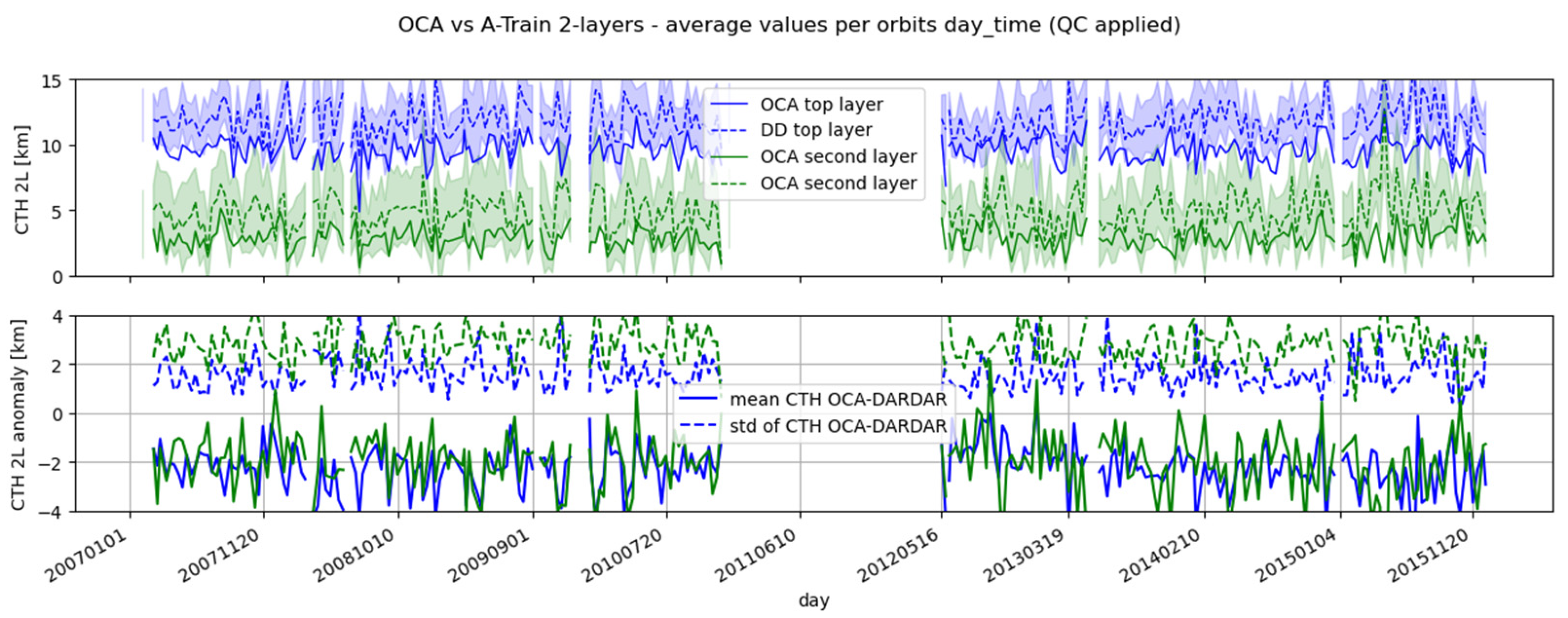
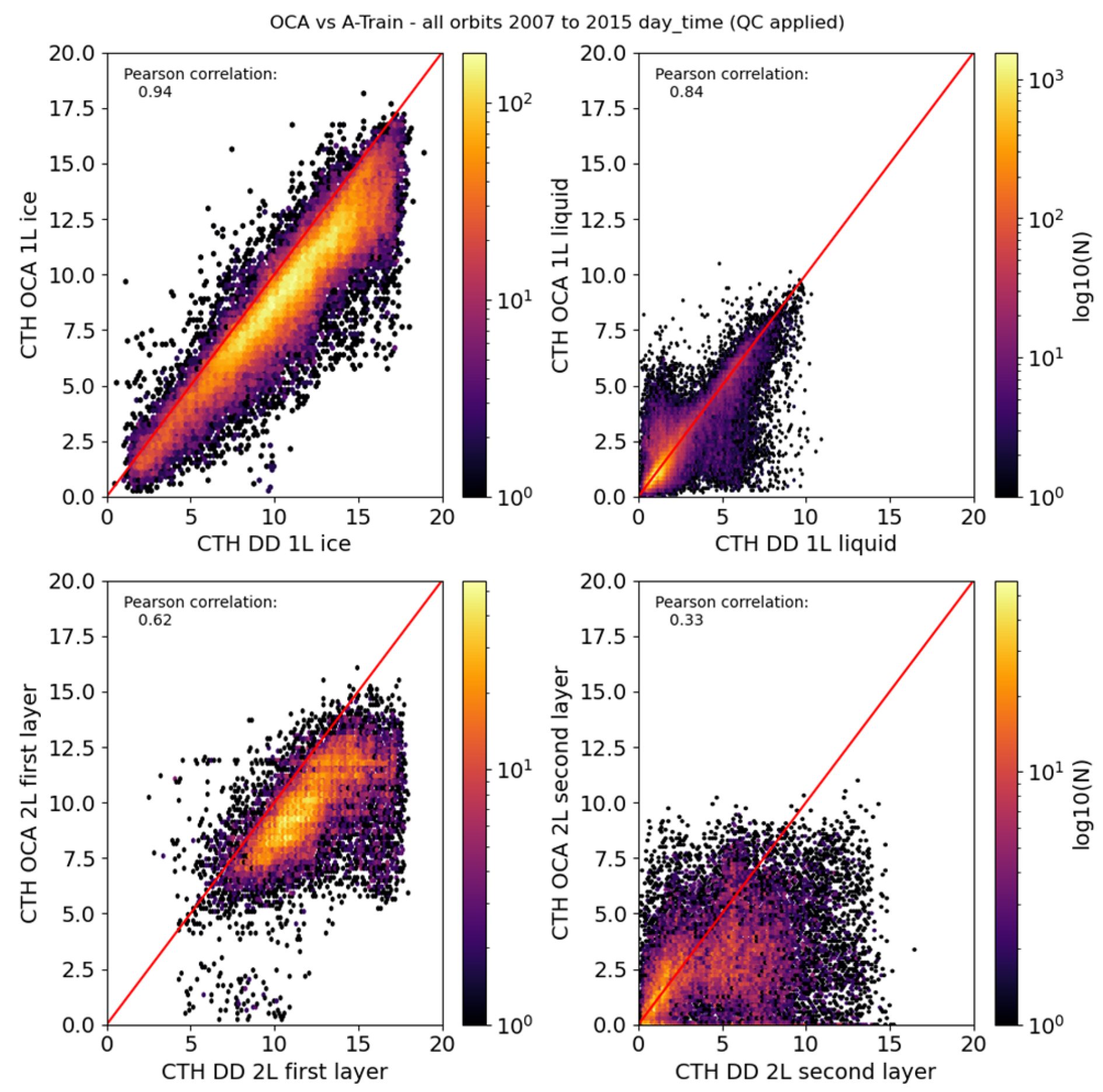
5.1.1. Cloud-Top Height
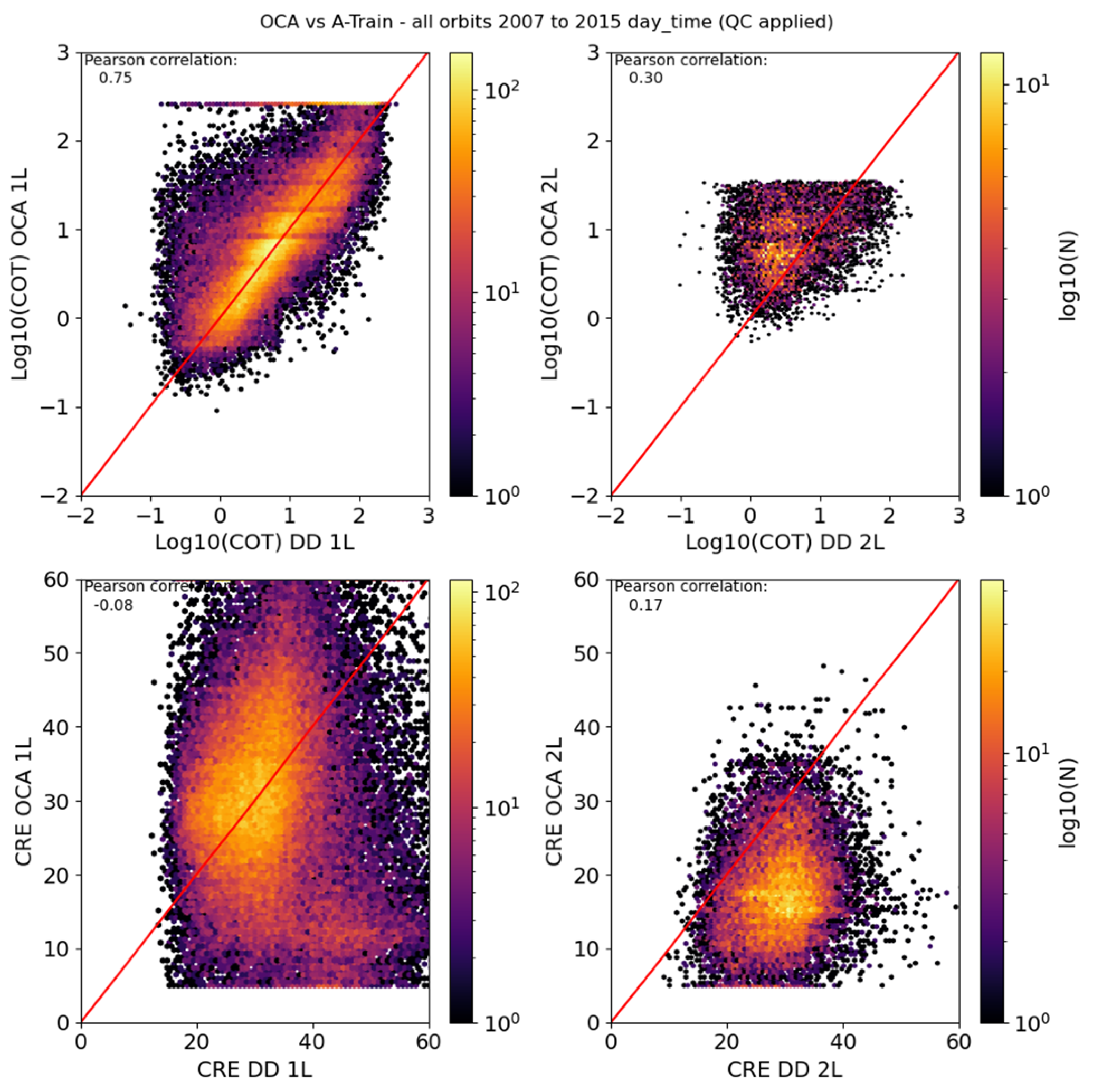
5.1.2. Ice Cloud Optical Thickness and Effective Radius
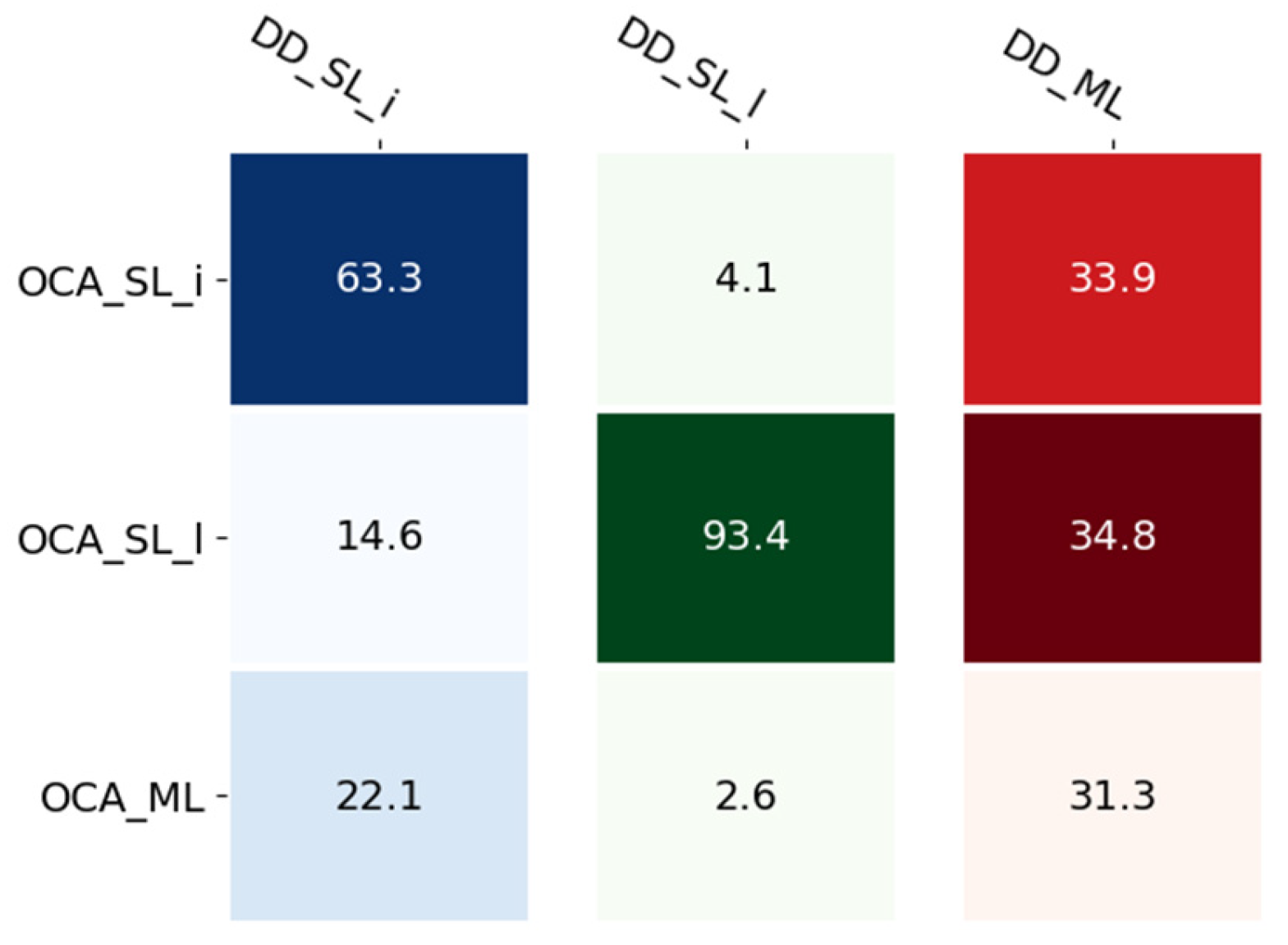
5.1.3. Cloud Phase
5.1.4. Evaluation of the Quality of the OCA Product Uncertainty
5.2. Comparison against MODIS L3, CLAAS-3, and CALIPSO L3 Products
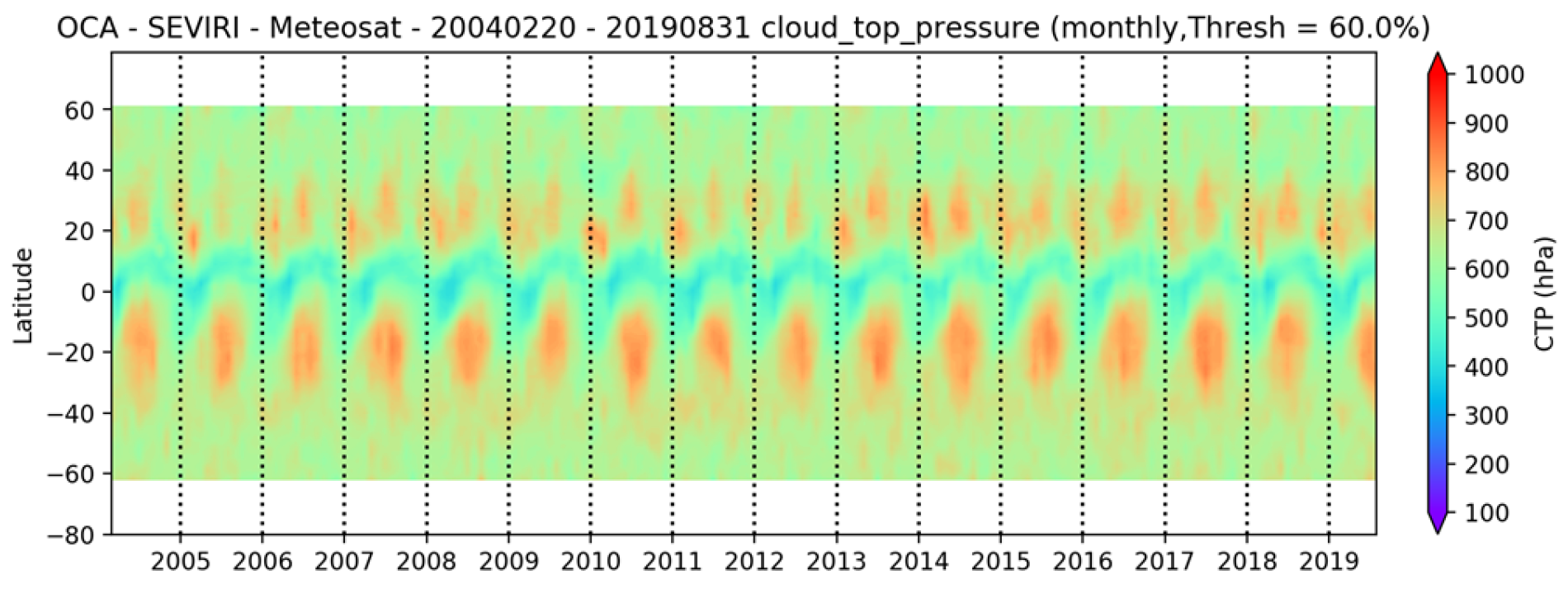
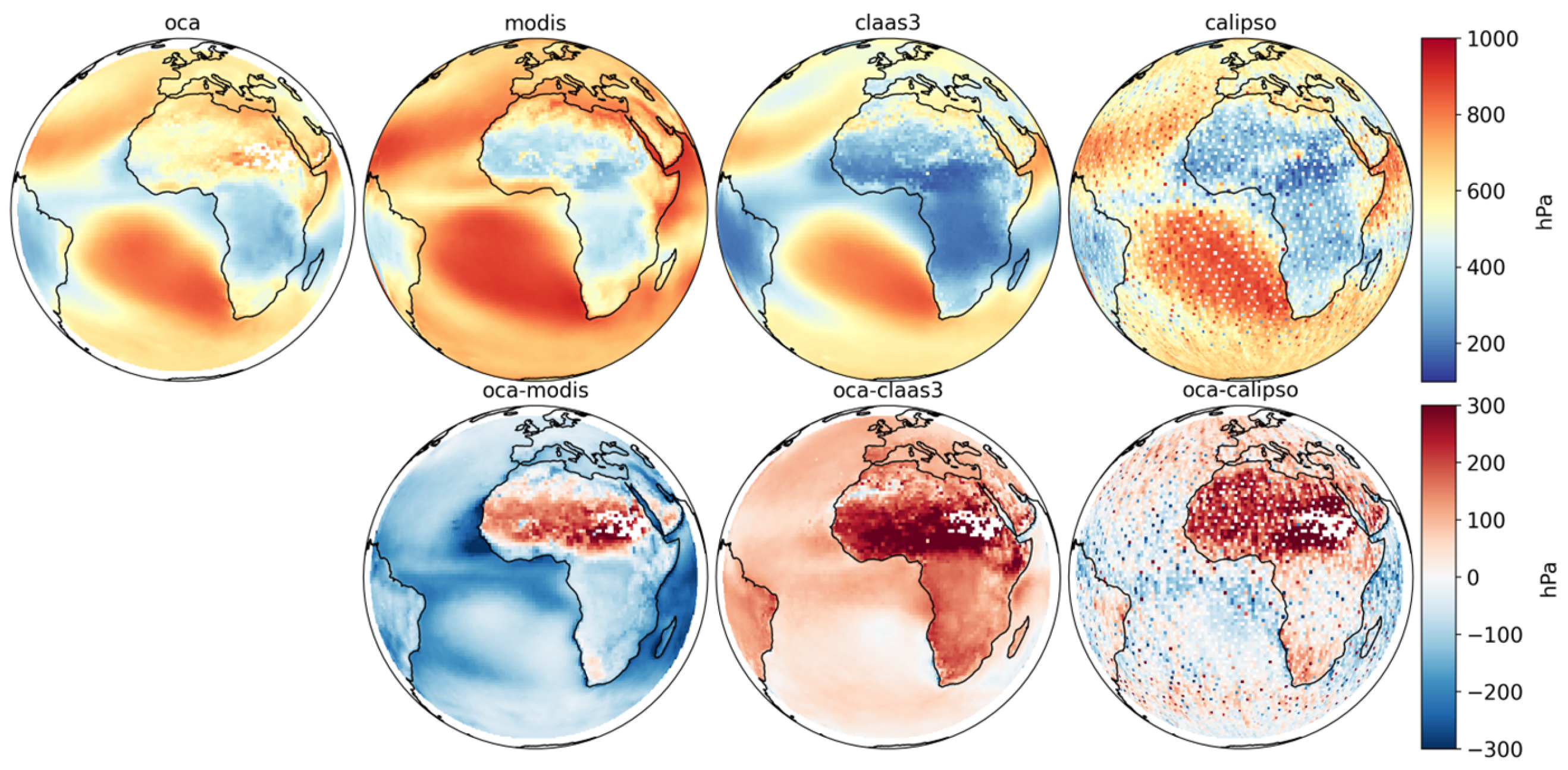
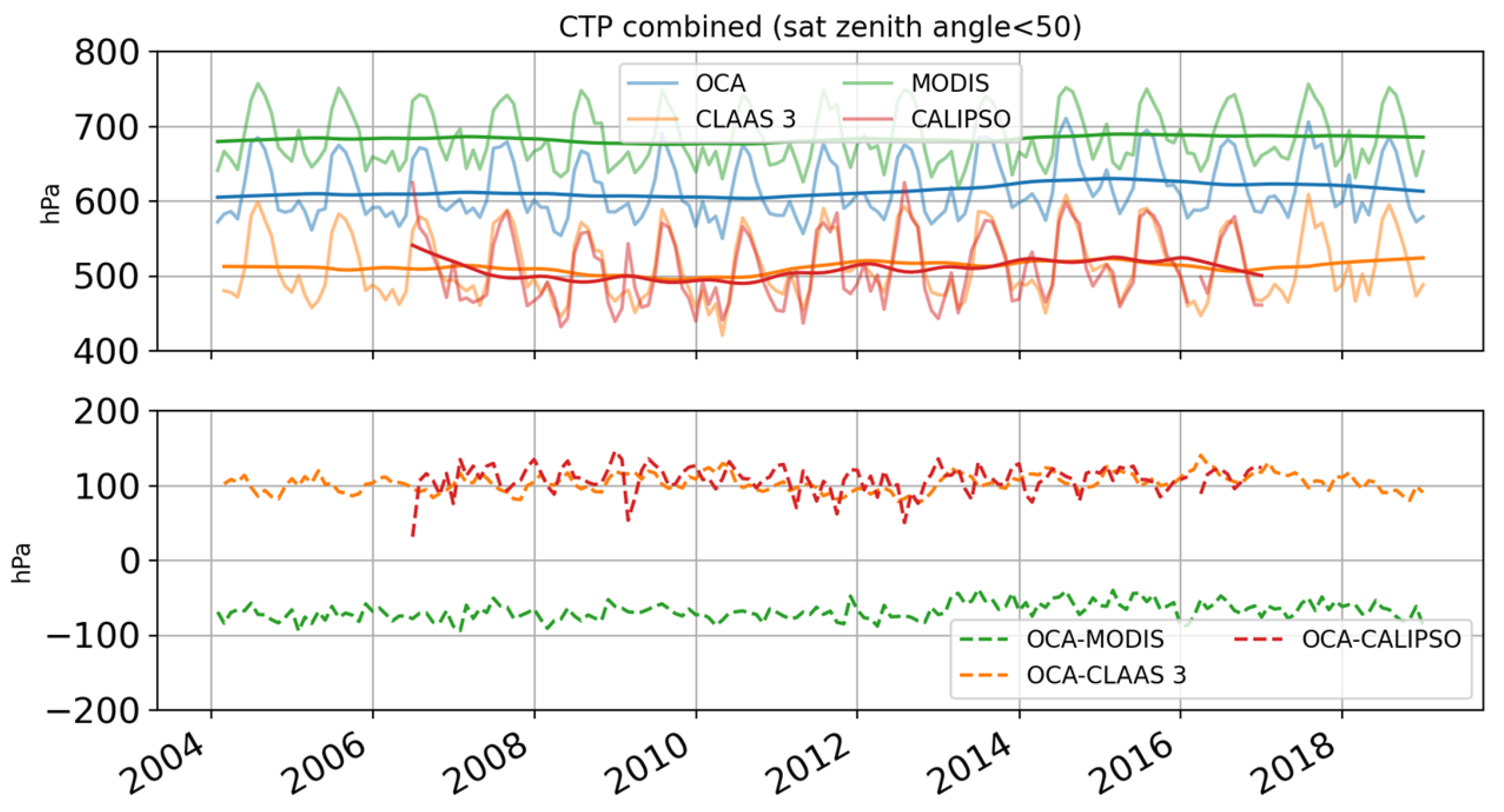
5.2.1. Cloud-Top Pressure (CTP)
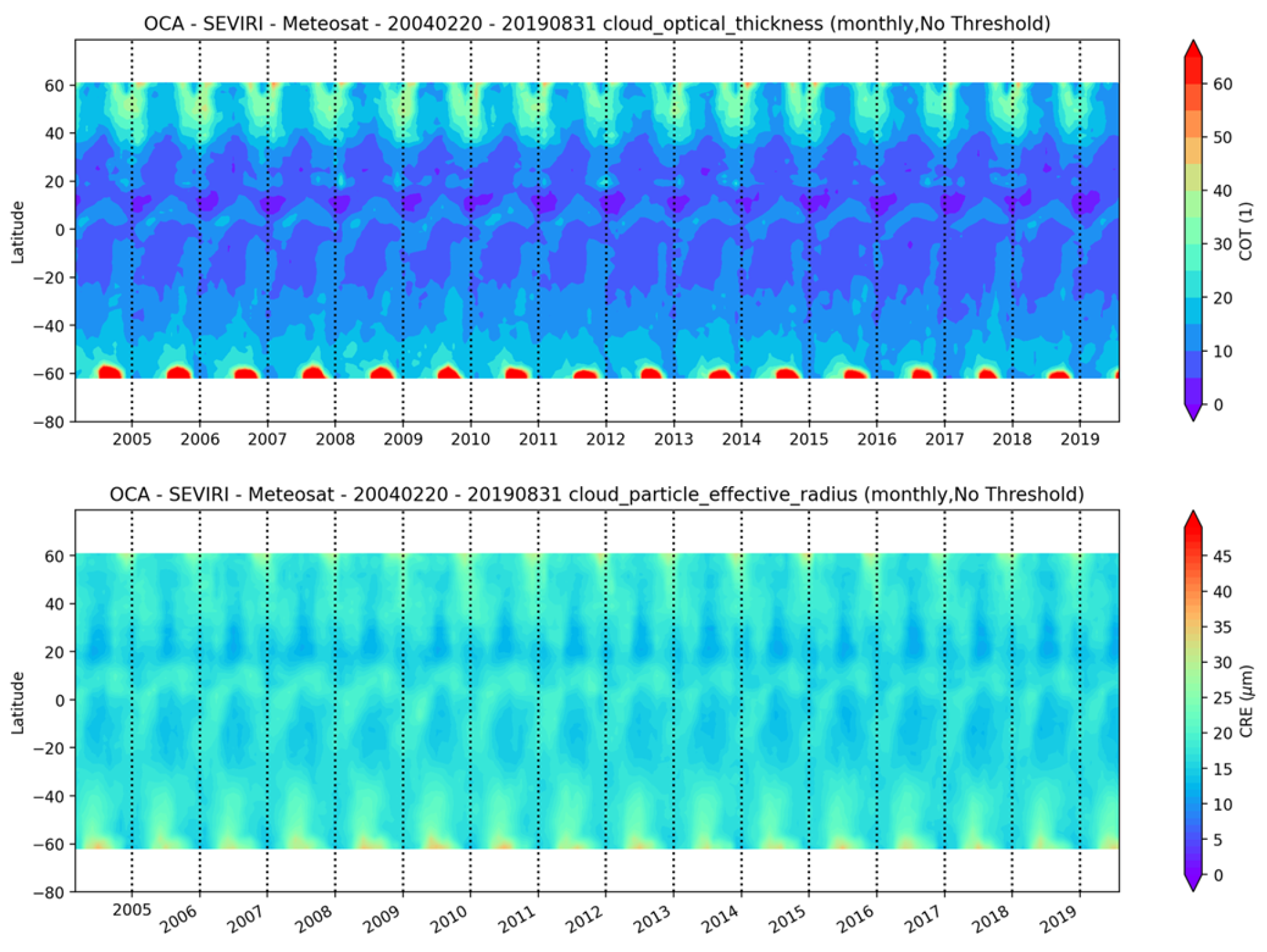
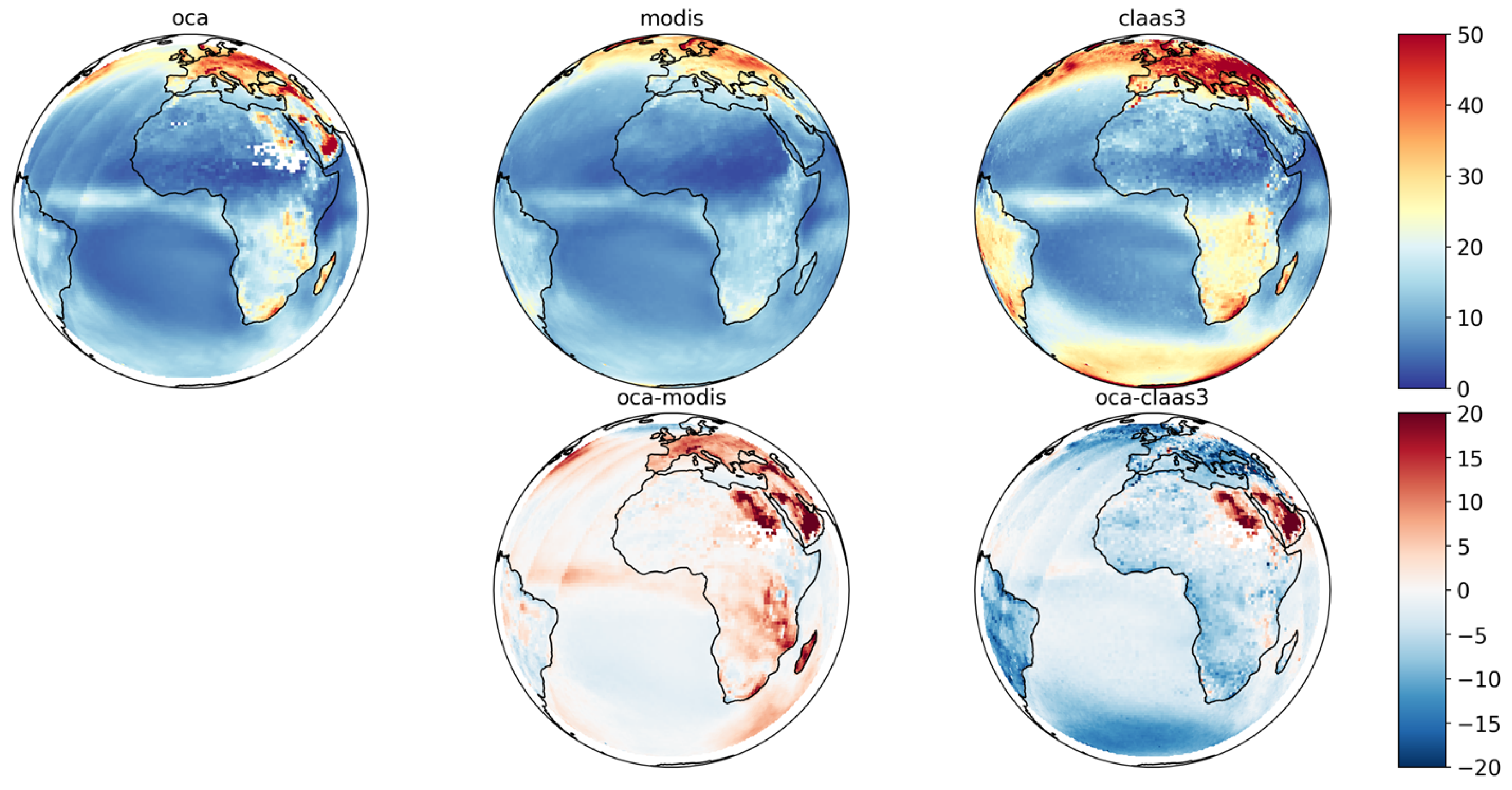
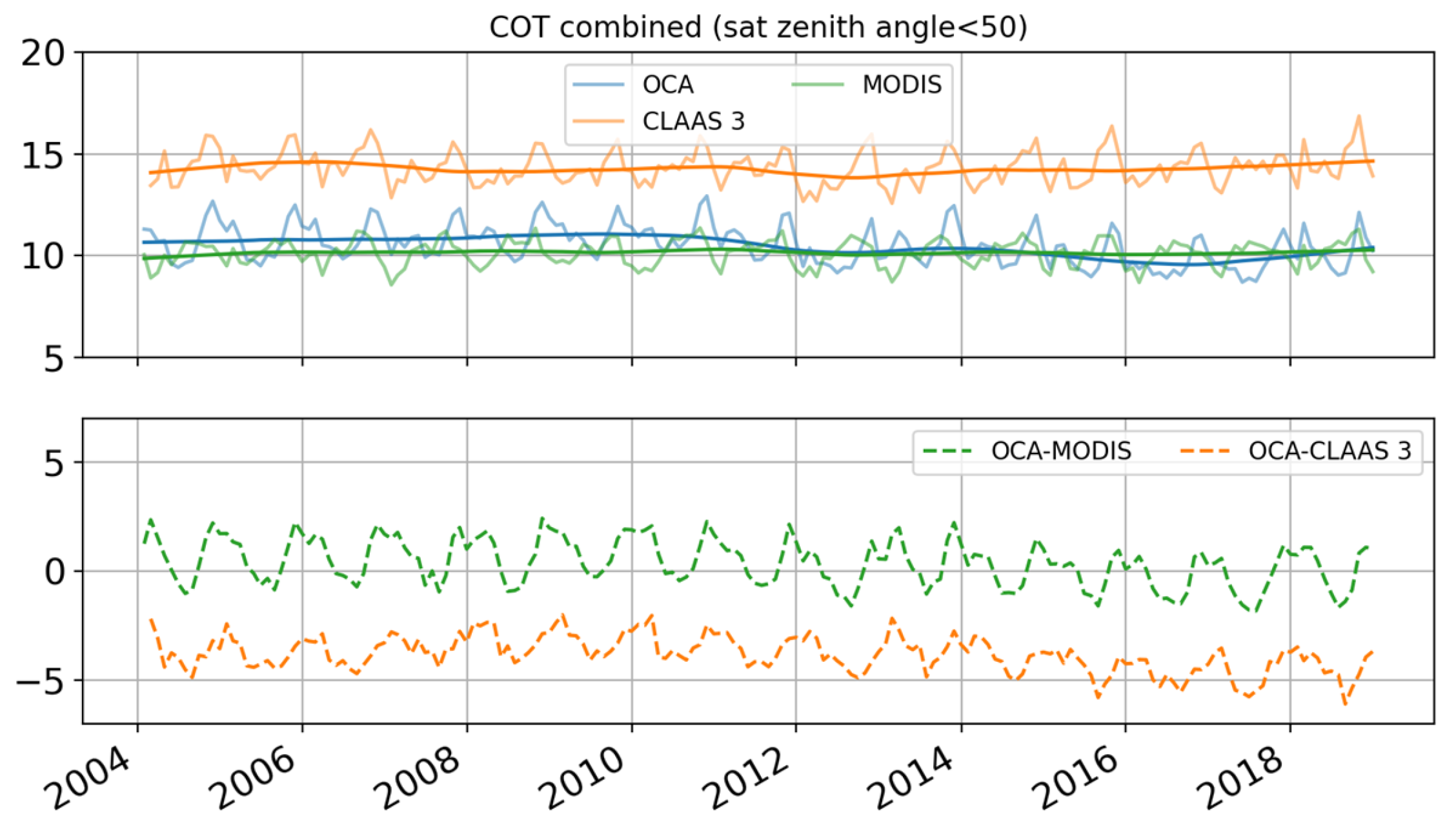
5.2.2. Cloud Optical Thickness (COT)
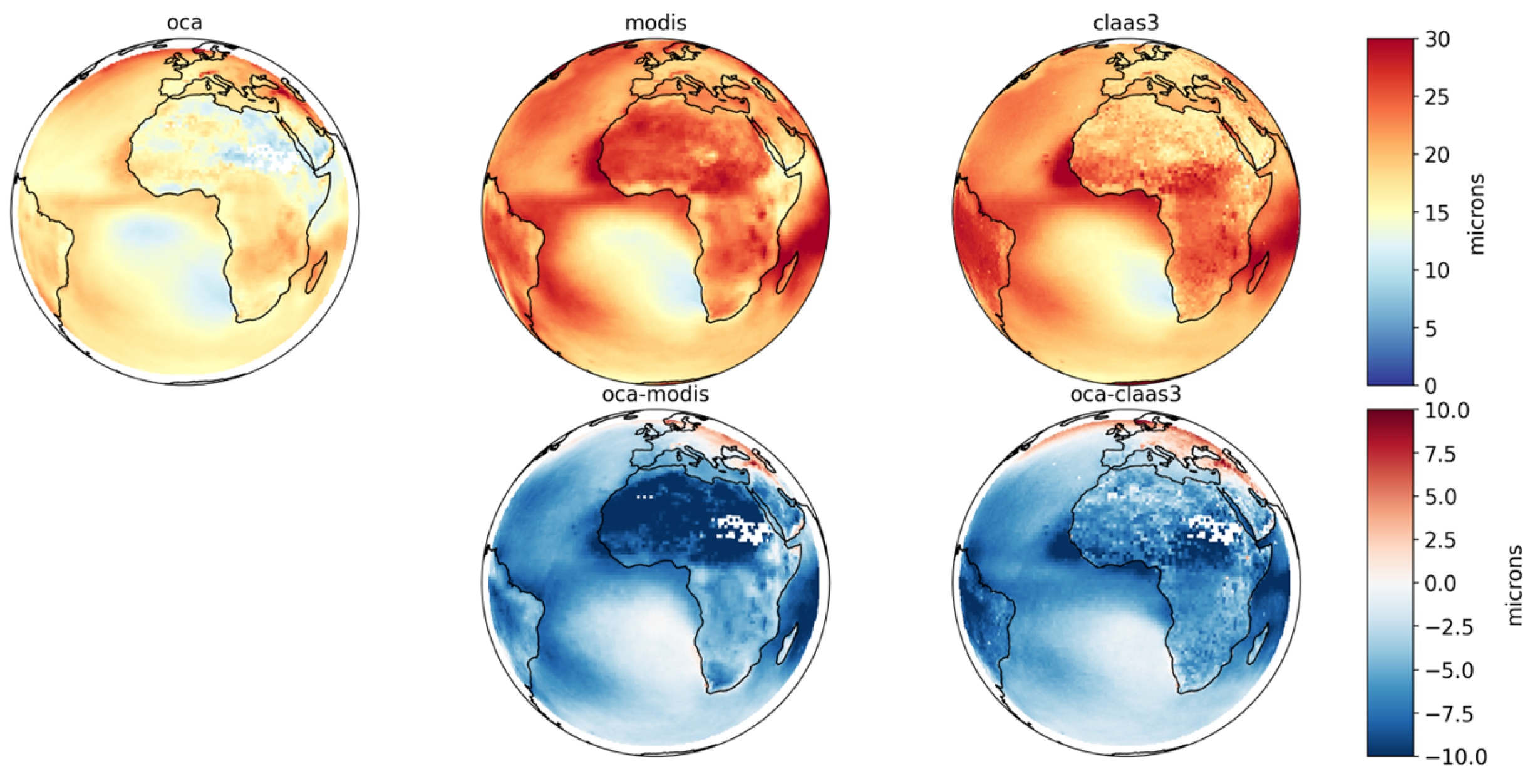
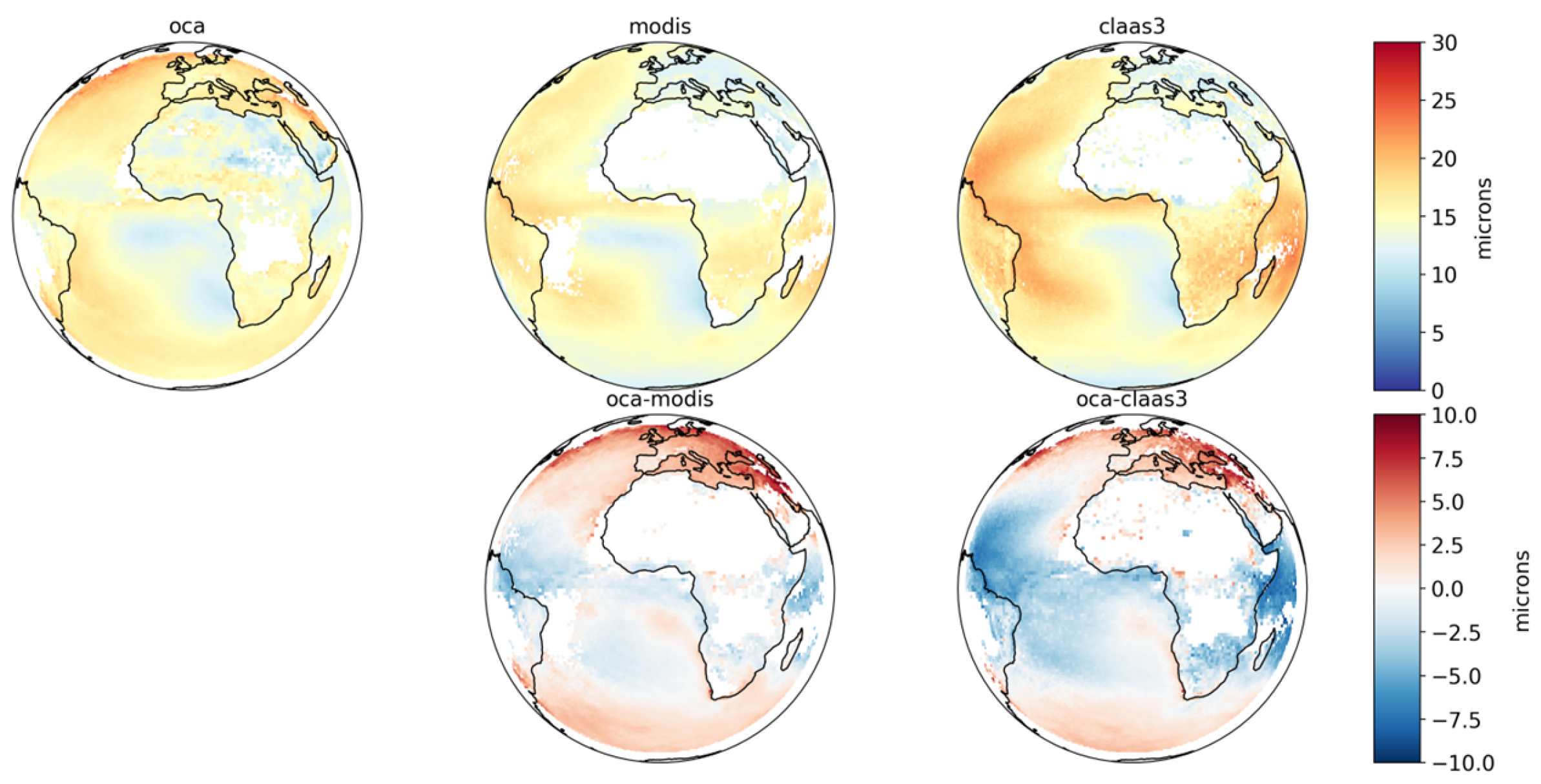
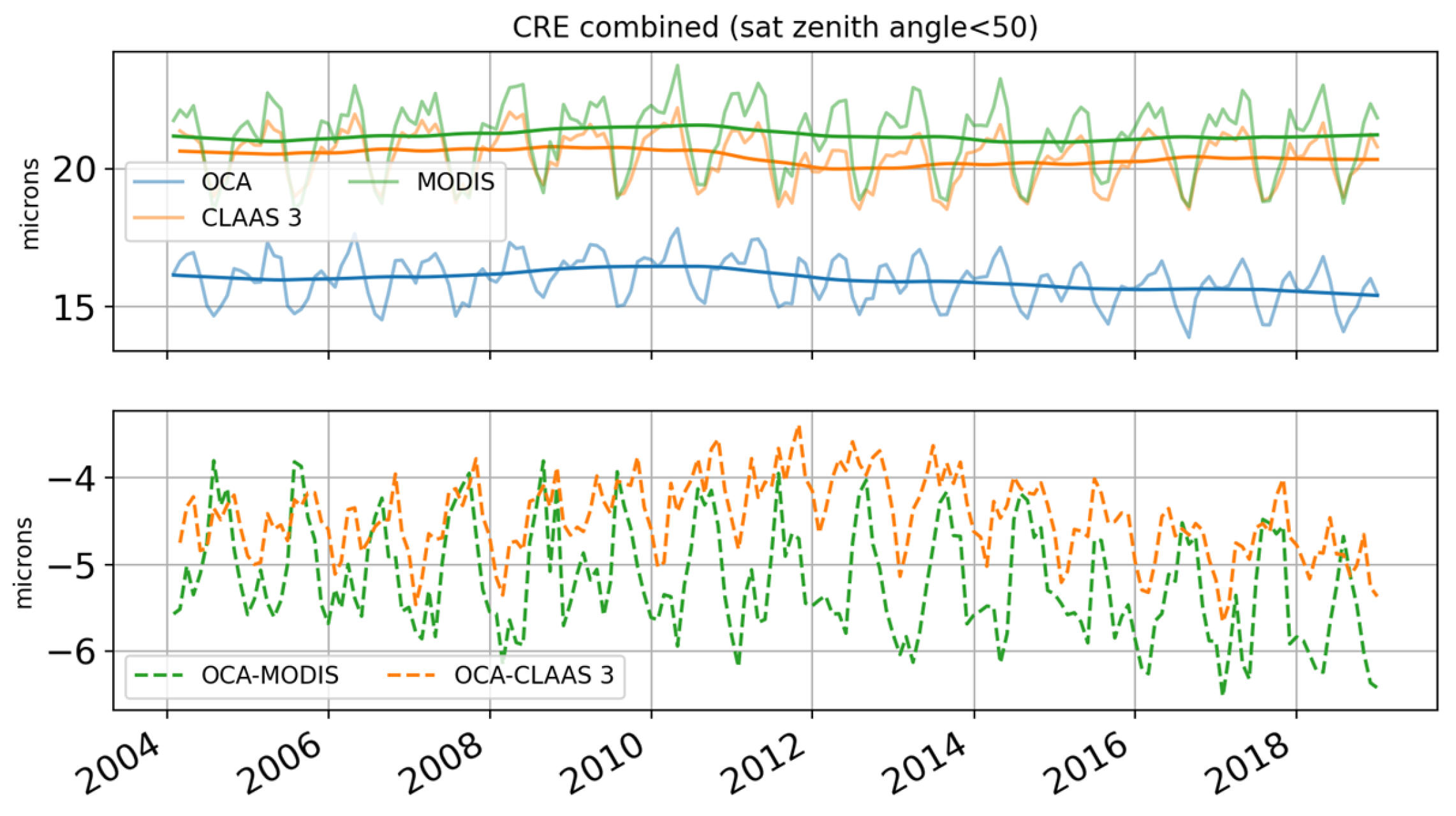
5.2.3. Cloud Particle Effective Radius (CRE)
- (1)
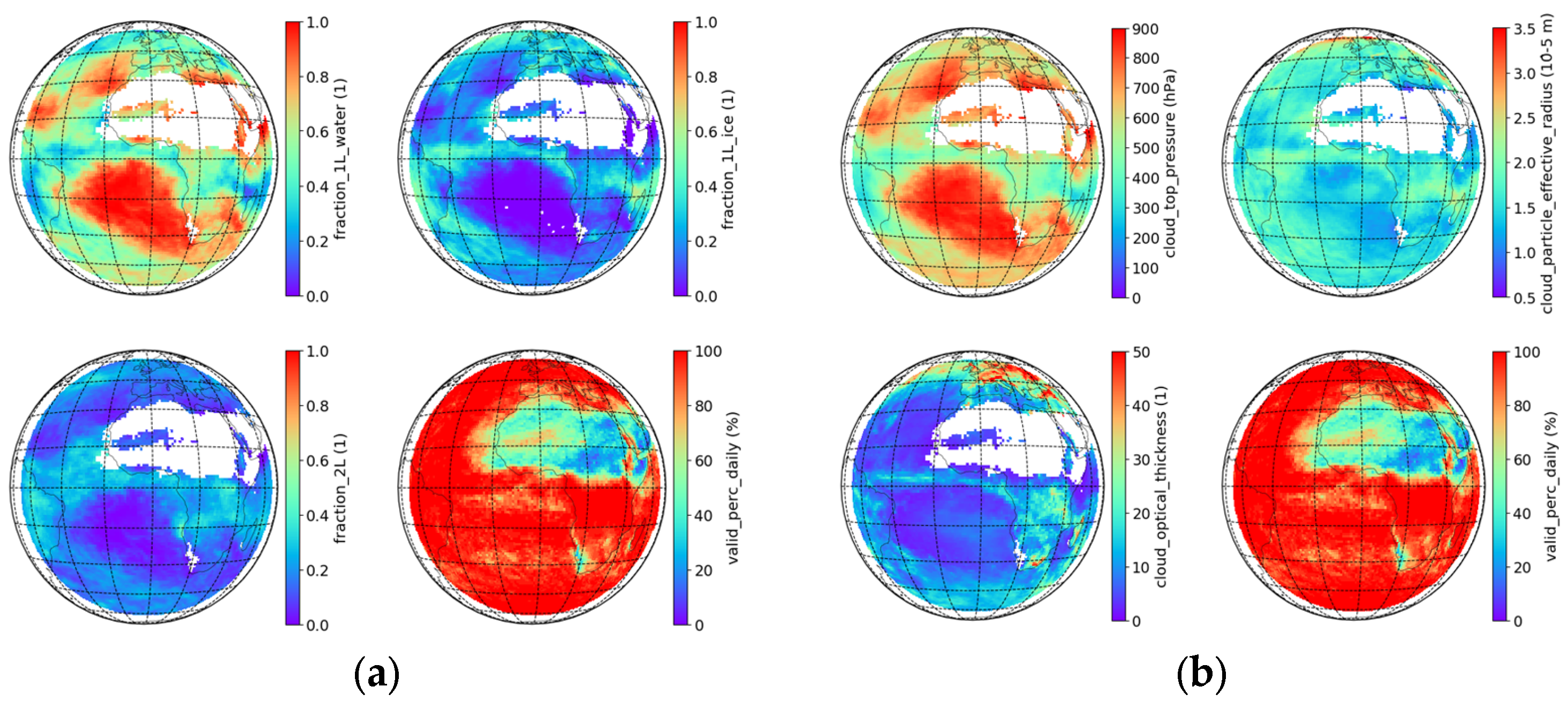
- The maximum limit allowed for in the retrieval of CRE for liquid clouds is set at 23 μm for OCA, while for CLAAS-3 and MODIS L3, it is allowed to retrieve liquid droplets up to 30 μm. This choice mostly affects the trade cumulus areas over the Equatorial and Tropical Atlantic Ocean, as observed in Figure 19, where areas with a fraction of single-layer liquid clouds in OCA larger than 60% are compared to the liquid CRE in MODIS and CLAAS-3 datasets. In areas where the phase fraction in the monthly averages includes both liquid and ice clouds, the smaller CRE in these areas will contribute to a smaller average CRE in OCA. The maximum CRE limit in OCA will be revised in a future version of this CDR.
- (2)
- As discussed in Section 5.1.2, in comparison with DARDAR, the OCA CRE retrieval for the upper layer in two-layer cases is biased low. This is due to the lack of constraint from the solar channels, which are currently not used for two-layer retrieval. This limitation will also be addressed in the next CDR, with a new forward model capable of providing consistent results between single- and two-layer situations.
- (3)
- The already mentioned too-large quantity of low liquid clouds over North Africa with small liquid droplets.
6. Discussion and Limitations
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Forster, P.; Storelvmo, T. The Earth’s Energy Budget, Climate Feedbacks, and Climate Sensitivity. In Climate Change 2021: The Physical Science Basis. Contribution of Working Group I to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2021; pp. 923–1054. [Google Scholar] [CrossRef]
- Schmetz, J.; Pili, P.; Tjemkes, S.; Just, D.; Kerkmann, J.; Rota, S.; Ratier, A. Supplement to An Introduction to Meteosat Second Generation (MSG): SEVIRI CALIBRATION. Bull. Amer. Meteor. Soc. 2002, 83, 992. [Google Scholar] [CrossRef]
- Watts, P.D.; Bennartz, R.; Fell, F. Retrieval of two-layer cloud properties from multispectral observations using optimal estimation. J. Geophys. Res. 2011, 116, D16203. [Google Scholar] [CrossRef]
- Stöckli, R.; Duguay-Tetzlaff, A.; Bojanowski, J.; Hollmann, R.; Fuchs, P.; Werscheck, M. CM SAF ClOud Fractional Cover Dataset from METeosat First and Second Generation, 1st ed.; (COMET) Satellite Application Facility for Climate Monitoring; EUMETSAT: Darmstadt, Germany, 2017. [Google Scholar]
- EUMETSAT. MTG-FCI: ATBD for Optimal Cloud Analysis Product. 2016. Available online: https://www-cdn.eumetsat.int/files/2020-06/pdf_mtg_atbd_oca.pdf (accessed on 2 August 2024).
- Poulsen, C.A.; Siddans, R.; Thomas, G.E.; Sayer, A.M.; Grainger, R.G.; Campmany, E.; Dean, S.M.; Arnold, C.; Watts, P.D. Cloud retrievals from satellite data using optimal estimation: Evaluation and application to ATSR. Atmos. Meas. Tech. 2012, 5, 1889–1910. [Google Scholar] [CrossRef]
- Baum, B.A.; Yang, P.; Heymsfield, A.J.; Bansemer, A.; Cole, B.H.; Merrelli, A.; Schmitt, C.; Wang, C. Ice cloud single-scattering property models with the full phase matrix at wavelengths from 0.2 to 100 µm. J. Quant. Spectrosc. Radiat. Transf. 2014, 146, 123–139. [Google Scholar] [CrossRef]
- Hocking, J.; Rayer, P.; Rundle, D.; Saunders, R. RTTOV v11 Users Guide. NWP SAF, EUMETSAT. 2015. Available online: https://nwp-saf.eumetsat.int/site/download/documentation/rtm/docs_rttov11/users_guide_11_v1.4.pdf (accessed on 2 August 2024).
- Stamnes, K.; Tsay, S.-C.; Wiscombe, W.; Jayaweera, K. Numerically stable algorithm for discrete-ordinate-method radiative transfer in multiple scattering and emitting layered media. Appl. Opt. 1988, 27, 2502. [Google Scholar] [CrossRef]
- Laszlo, I.; Stamnes, K.; Wiscombe, W.J.; Tsay, S.-C. The Discrete Ordinate Algorithm, DISORT for Radiative Transfer. In Light Scattering Reviews; Kokhanovsky, A., Ed.; Springer: Berlin/Heidelberg, Germany, 2016; Volume 11, pp. 3–65. [Google Scholar] [CrossRef]
- Meirink, J.F.; Roebeling, R.A.; Stammes, P. Inter-calibration of polar imager solar channels using SEVIRI. Atmos. Meas. Tech. 2013, 6, 2495–2508. [Google Scholar] [CrossRef]
- Dee, D.P.; Uppala, S.M.; Simmons, A.J.; Berrisford, P.; Poli, P.; Kobayashi, S.; Andrae, U.; Balmaseda, M.A.; Balsamo, G.; Bauer, P.; et al. The ERA-Interim reanalysis: Configuration and performance of the data assimilation system. Quart J. Royal Meteoro. Soc. 2011, 137, 553–597. [Google Scholar] [CrossRef]
- EUMETSAT. Clear Sky Reflectance Map: Product Guide. 29 May 2015. Available online: https://user.eumetsat.int/s3/eup-strapi-media/pdf_crm_factsheet_e44562ba08.pdf (accessed on 2 August 2024).
- EUMETSAT. Optimal Cloud Analysis (OCA) Release 1 Product Users Guide. 2021. Available online: https://user.eumetsat.int/s3/eup-strapi-media/Optimal_Cloud_Analysis_OCA_Release_1_Product_Users_Guide_5120a10382.pdf (accessed on 2 August 2024).
- Delanoë, J.; Hogan, R.J. A variational scheme for retrieving ice cloud properties from combined radar, lidar, and infrared radiometer. J. Geophys. Res. 2008, 113, D07204. [Google Scholar] [CrossRef]
- Delanoë, J.; Hogan, R.J. Combined CloudSat-CALIPSO-MODIS retrievals of the properties of ice clouds. J. Geophys. Res. 2010, 115, D00H29. [Google Scholar] [CrossRef]
- Winker, D.M.; Pelon, J.R.; McCormick, M.P. The CALIPSO mission: Spaceborne lidar for observation of aerosols and clouds. In Proceedings of the Third International Asia-Pacific Environmental Remote Sensing Remote Sensing of the Atmosphere, Ocean, Environment, and Space, Hangzhou, China, 23–27 October 2002; Singh, U.N., Itabe, T., Liu, Z., Eds.; SPIE: San Francisco, CA, USA, 2003; p. 1. [Google Scholar] [CrossRef]
- Stephens, G.L.; Vane, D.G.; Boain, R.J.; Mace, G.G.; Sassen, K.; Wang, Z.; Illingworth, A.J.; O’Connor, E.J.; Rossow, W.B.; Durden, S.L.; et al. THE CLOUDSAT MISSION AND THE A-TRAIN: A New Dimension of Space-Based Observations of Clouds and Precipitation. Bull. Amer. Meteor. Soc. 2002, 83, 1771–1790. [Google Scholar] [CrossRef]
- King, M.D.; Kaufman, Y.J.; Menzel, W.P.; Tanre, D. Remote sensing of cloud, aerosol, and water vapor properties from the moderate resolution imaging spectrometer (MODIS). IEEE Trans. Geosci. Remote Sens. 1992, 30, 2–27. [Google Scholar] [CrossRef]
- Bennartz, R.; Fell, F.; Walther, A. AVAC-S: A-Train Validation of Aerosol and Cloud properties from SEVIRI. In Proceedings of the NWC SAF 2010 Users’ Workshop, Madrid, Spain, 26–28 April 2010. [Google Scholar]
- Benas, N.; Solodovnik, I.; Stengel, M.; Hüser, I.; Karlsson, K.-G.; Håkansson, N.; Johansson, E.; Eliasson, S.; Schröder, M.; Hollmann, R.; et al. CLAAS-3: The third edition of the CM SAF cloud data record based on SEVIRI observations. Earth Syst. Sci. Data 2023, 15, 5153–5170. [Google Scholar] [CrossRef]
- Håkansson, N.; Adok, C.; Thoss, A.; Scheirer, R.; Hörnquist, S. Neural network cloud top pressure and height for MODIS. Atmos. Meas. Tech. 2018, 11, 3177–3196. [Google Scholar] [CrossRef]
- Roebeling, R.A.; Feijt, A.J.; Stammes, P. Cloud property retrievals for climate monitoring: Implications of differences between Spinning Enhanced Visible and Infrared Imager (SEVIRI) on METEOSAT-8 and Advanced Very High Resolution Radiometer (AVHRR) on NOAA-17. J. Geophys. Res. 2006, 111, D20210. [Google Scholar] [CrossRef]
- Meirink, J.F.; Stengel, M.; Benas, N.; Solodovnik, I.; Håkansson, N.; Karlsson, K.-G. Validation Report SEVIRI Cloud Products CLAAS Edition 3. CM-SAF. 2022. Available online: https://www.cmsaf.eu/SharedDocs/Literatur/document/2022/saf_cm_knmi_val_sev_cld_3_1_final_pdf.pdf (accessed on 2 August 2024).
- Hubanks, P.A.; Platnick, S.; King, M.D.; Ridgway, W.L. MODIS Atmosphere L3 Global Gridded Product User’s Guide & ATBD for C6.1 Products: 08_D3, 08_E3, 08_M3. NASA, 6 August 2020. [Google Scholar]
- Platnick, S.; Meyer, K.G.; King, M.D.; Wind, G.; Amarasinghe, N.; Marchant, B.; Arnold, G.T.; Zhang, Z.; Hubanks, P.A.; Holz, R.E.; et al. The MODIS Cloud Optical and Microphysical Products: Collection 6 Updates and Examples From Terra and Aqua. IEEE Trans. Geosci. Remote Sens. 2017, 55, 502–525. [Google Scholar] [CrossRef]
- Menzel, W.P.; Frey, R.A.; Baum, B.A. Cloud Top Properties and Cloud Phase Algorithm Theoretical Basis Document. 2015. Available online: https://atmosphere-imager.gsfc.nasa.gov/sites/default/files/ModAtmo/MOD06-ATBD_2015_05_01_1.pdf (accessed on 2 August 2024).
- EUMETSAT. Optimal Cloud Analysis (OCA) Release 1 Validation Report. 2021. Available online: https://user.eumetsat.int/s3/eup-strapi-media/Optimal_Cloud_Analysis_OCA_Release_1_Validation_Report_838e398fac.pdf (accessed on 2 August 2024).
- Platnick, S.; Meyer, K.G.; King, M.D.; Wind, G.; Amarasinghe, N.; Marchant, B.; Arnold, G.T.; Zhang, Z.; Hubanks, P.A.; Ridgway, B.; et al. MODIS Cloud Optical Properties: User Guide for the Collection 6/6.1 Level-2 MOD06/MYD06 Product and Associated Level-3 Datasets. In NASA; 2018. Available online: https://atmosphere-imager.gsfc.nasa.gov/sites/default/files/ModAtmo/MODISCloudOpticalPropertyUserGuideFinal_v1.1_1.pdf (accessed on 2 August 2024).
- Hamann, U.; Walther, A.; Baum, B.; Bennartz, R.; Bugliaro, L.; Derrien, M.; Francis, P.N.; Heidinger, A.; Joro, S.; Kniffka, A.; et al. Remote sensing of cloud top pressure/height from SEVIRI: Analysis of ten current retrieval algorithms. Atmos. Meas. Tech. 2014, 7, 2839–2867. [Google Scholar] [CrossRef]
- Chung, C.-Y.; Francis, P.; Saunders, R.; Kim, J. Comparison of SEVIRI-Derived Cloud Occurrence Frequency and Cloud-Top Height with A-Train Data. Remote Sens. 2016, 9, 24. [Google Scholar] [CrossRef]
- Merchant, C.J.; Paul, F.; Popp, T.; Ablain, M.; Bontemps, S.; Defourny, P.; Hollmann, R.; Lavergne, T.; Laeng, A.; de Leeuw, G.; et al. Uncertainty information in climate data records from Earth observation. Earth Syst. Sci. Data 2017, 9, 511–527. [Google Scholar] [CrossRef]
- Nguyen, H.; Cressie, N.; Hobbs, J. Sensitivity of Optimal Estimation Satellite Retrievals to Misspecification of the Prior Mean and Covariance, with Application to OCO-2 Retrievals. Remote Sens. 2019, 11, 2770. [Google Scholar] [CrossRef]
- Yang, P.; Bi, L.; Baum, B.A.; Liou, K.-N.; Kattawar, G.W.; Mishchenko, M.I.; Cole, B. Spectrally Consistent Scattering, Absorption, and Polarization Properties of Atmospheric Ice Crystals at Wavelengths from 0.2 to 100 μm. J. Atmos. Sci. 2013, 70, 330–347. [Google Scholar] [CrossRef]
- Baum, B.A.; Yang, P.; Heymsfield, A.J.; Schmitt, C.G.; Xie, Y.; Bansemer, A.; Hu, Y.-X.; Zhang, Z. Improvements in Shortwave Bulk Scattering and Absorption Models for the Remote Sensing of Ice Clouds. J. Appl. Meteorol. Climatol. 2011, 50, 1037–1056. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite | Start Date | End Date |
|---|---|---|
| Meteosat-8 | 19 January 2004 | 11 April 2007 |
| Meteosat-9 | 11 April 2007 | 21 January 2013 |
| Meteosat-10 | 21 January 2013 | 20 February 2018 |
| Meteosat-11 | 20 February 2018 | 31 August 2019 |
| L2 Products Resolution | L3 Products Resolution | |||
|---|---|---|---|---|
| Spatial | Temporal | Spatial | Temporal | |
| OCA | 3 km at nadir | 15 min | 1° × 1° | Monthly mean from 7 observations/day (hourly from 09Z to 15Z) |
| MODIS | 1 km at nadir | Twice daily at low/mid latitudes | 1° × 1° | Monthly mean from roughly 1 observation/day at low to mid latitudes |
| OCA | DARDAR | OCA-DARDAR | ||||
|---|---|---|---|---|---|---|
| Day (2007–2016) | Night (2007–2010) | Day (2007–2016) | Night (2007–2010) | Day (2007–2016) | Night (2007–2010) | |
| CTH (km) | Mean (std) | Mean (std) | Mean (std) | Mean (std) | Mean (std) | mean (std) |
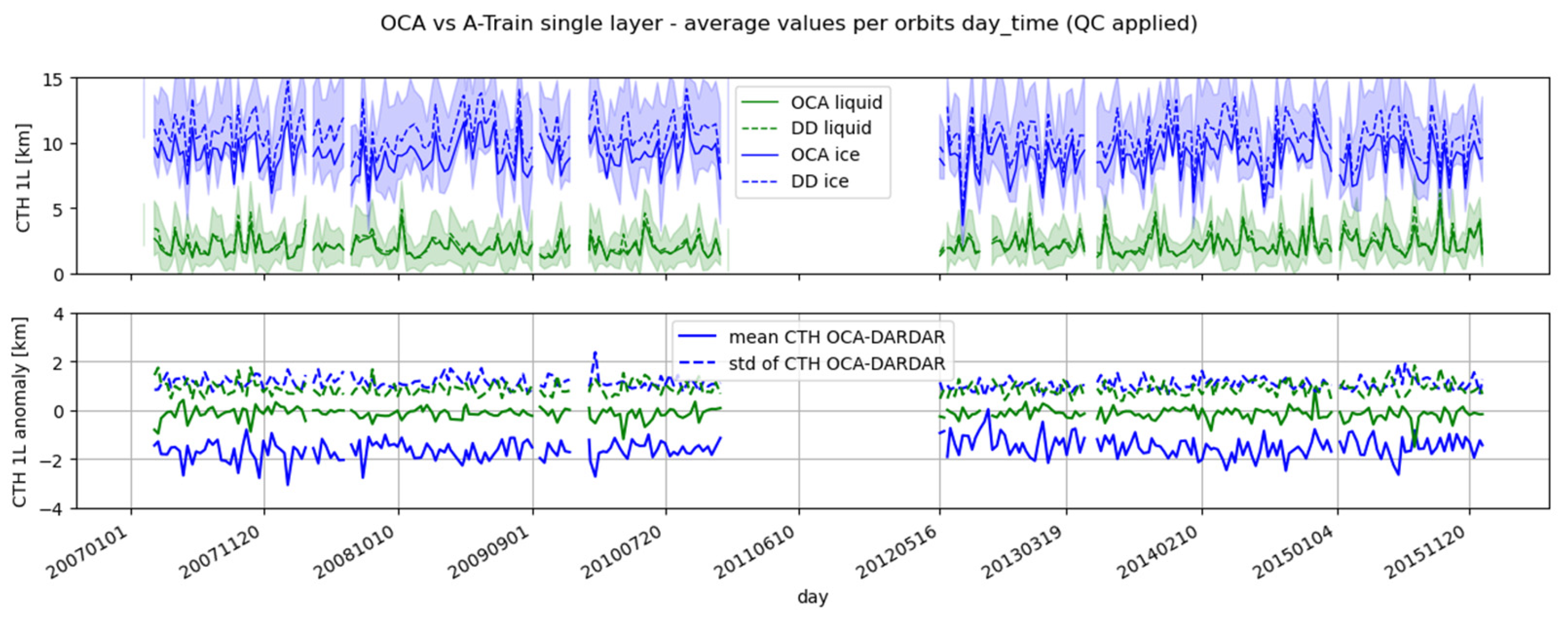
| Ice, single | 9.2 (3.0) | 8.2 (3.2) | 10.8 (3.3) | 10.2 (3.7) | −1.6 (1.2) | −2.0 (1.6) |
| Liquid, single | 1.9 (1.5) | 1.7 (1.3) | 2.0 (1.6) | 1.8 (1.4) | −0.1 (0.9) | −0.1 (0.8) |
| Two-layer upper | 9.7 (1.8) | 9.8 (1.7) | 12.1 (2.4) | 12.7 (2.6) | −2.4 (1.9) | −2.9 (2.0) |
| Two-layer lower | 2.9 (2.0) | 2.6 (2.1) | 4.9 (3.2) | 5.0 (3.3) | −2.0 (3.1) | −2.3 (3.3) |
| CRE (μm) | ||||||
| Ice, single | 30.8 (12.9) | 50.9 (16.3) | 32.9 (8.9) | 32.7 (11.2) | −2.1 (15.9) | 18.4 (19.2) |
| Two-layer upper | 17.4 (6.1) | 16.5 (4.9) | 29.3 (5.8) | 26.0 (6.6) | −11.9 (7.9) | −9.4 (7.2) |
| Log10 (COT) | ||||||
| Ice, single | 0.87 (0.64) | 1.01 (0.40) | 0.78 (0.63) | 0.91 (0.64) | 0.08 (0.44) | 0.18 (0.65) |
| Two-layer | 0.87 (0.65) | 0.70 (0.27) | 0.42 (0.50) | 0.35 (0.42) | 0.44 (0.52) | 0.35 (0.45) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bozzo, A.; Doutriaux-Boucher, M.; Jackson, J.; Spezzi, L.; Lattanzio, A.; Watts, P.D. First Release of the Optimal Cloud Analysis Climate Data Record from the EUMETSAT SEVIRI Measurements 2004–2019. Remote Sens. 2024, 16, 2989. https://doi.org/10.3390/rs16162989
Bozzo A, Doutriaux-Boucher M, Jackson J, Spezzi L, Lattanzio A, Watts PD. First Release of the Optimal Cloud Analysis Climate Data Record from the EUMETSAT SEVIRI Measurements 2004–2019. Remote Sensing. 2024; 16(16):2989. https://doi.org/10.3390/rs16162989
Chicago/Turabian StyleBozzo, Alessio, Marie Doutriaux-Boucher, John Jackson, Loredana Spezzi, Alessio Lattanzio, and Philip D. Watts. 2024. "First Release of the Optimal Cloud Analysis Climate Data Record from the EUMETSAT SEVIRI Measurements 2004–2019" Remote Sensing 16, no. 16: 2989. https://doi.org/10.3390/rs16162989
APA StyleBozzo, A., Doutriaux-Boucher, M., Jackson, J., Spezzi, L., Lattanzio, A., & Watts, P. D. (2024). First Release of the Optimal Cloud Analysis Climate Data Record from the EUMETSAT SEVIRI Measurements 2004–2019. Remote Sensing, 16(16), 2989. https://doi.org/10.3390/rs16162989