

Building Better Models: Benchmarking Feature Extraction and Matching for Structure from Motion at Construction Sites

Abstract
1. Introduction
- (i)
- Metric limitations: Existing metrics like accuracy and completeness might not fully capture the impact of feature extractors and matchers on reconstruction quality. More nuanced metrics are needed to assess factors like efficiency, robustness to challenging conditions (e.g., low-quality images), and the influence on downstream tasks within the SfM pipeline.
- (ii)
- Dataset limitations: Existing benchmarks often focus on specific datasets (e.g., HPatches [26]), which are often limited in scope, featuring mostly planar scenes with consistent illumination and texture. While these datasets are useful for evaluating specific aspects of feature extractors and matchers, they might not generalize well to real-world scenarios. More diverse datasets are needed to evaluate the performance of feature extractors and matchers across different environments and conditions.
- (iii)
- Limited reporting: Benchmarks often lack focus on how previous work specifies and chooses feature extractors and matchers. Ideally, benchmarks should encourage researchers to report their choices and configurations for better interpretability and comparison of results. Addressing these limitations can lead to more informative benchmarks and advance the field of SfM.
- (iv)
- Computational constraints: Benchmarks often do not consider the computational efficiency of feature extractors and matchers, which is crucial for real-time or large-scale applications. Methods that perform well in terms of accuracy may be impractically slow for certain applications.
- (i)
- Comprehensive evaluation: We provide a thorough evaluation of traditional methods and learning-based methods within the SfM pipeline for construction site mapping. This evaluation covers both feature extraction and matching stages, including a comparison of traditional and learned-based methods.
- (ii)
- Diverse benchmarking: Our study specifically focuses on the performance of these methods in challenging environments typical of construction sites, characterized by complex lighting conditions, occlusions, dynamic objects, and varying textures. These datasets better represent real-world scenarios, extending the limitations of existing benchmarks that often use overly controlled or simplistic datasets.
- (iii)
- Evaluation metrics: We utilize a comprehensive set of metrics to evaluate the impact of feature extractors and matchers on reconstruction quality, efficiency, and robustness. These metrics provide a more nuanced understanding of the performance of different combinations of methods.
- (i)
- Assess how learned-based methods enhance 3D reconstruction quality compared to traditional methods.
- (ii)
- Determine the optimal scenarios for learned-based methods in 3D reconstruction.
- (iii)
- Evaluate the out-of-the-box performance of various feature extraction and matching methods to provide practical insights for end-users and real-world applications without extensive parameter tuning.
- (iv)
- Evaluate the applicability of learned-based methods in challenging environments like construction sites.
2. Related Works
2.1. Existing Benchmarks on Feature Extractors and Matchers
2.2. Existing Benchmarks on SfM
2.3. Applications of SfM in Construction
3. Evaluated Methods
3.1. Feature Extraction Techniques
3.2. Feature Matching Techniques
4. Evaluation Procedure
4.1. Platform
4.2. Implementation
| Algorithm 1: Feature extraction and matching process |
|
| Algorithm 2: Three-dimensional reconstruction process |
|
- (i)
- Feature extraction and matching were conducted using combinations of methods as detailed in Table 2.
- (ii)
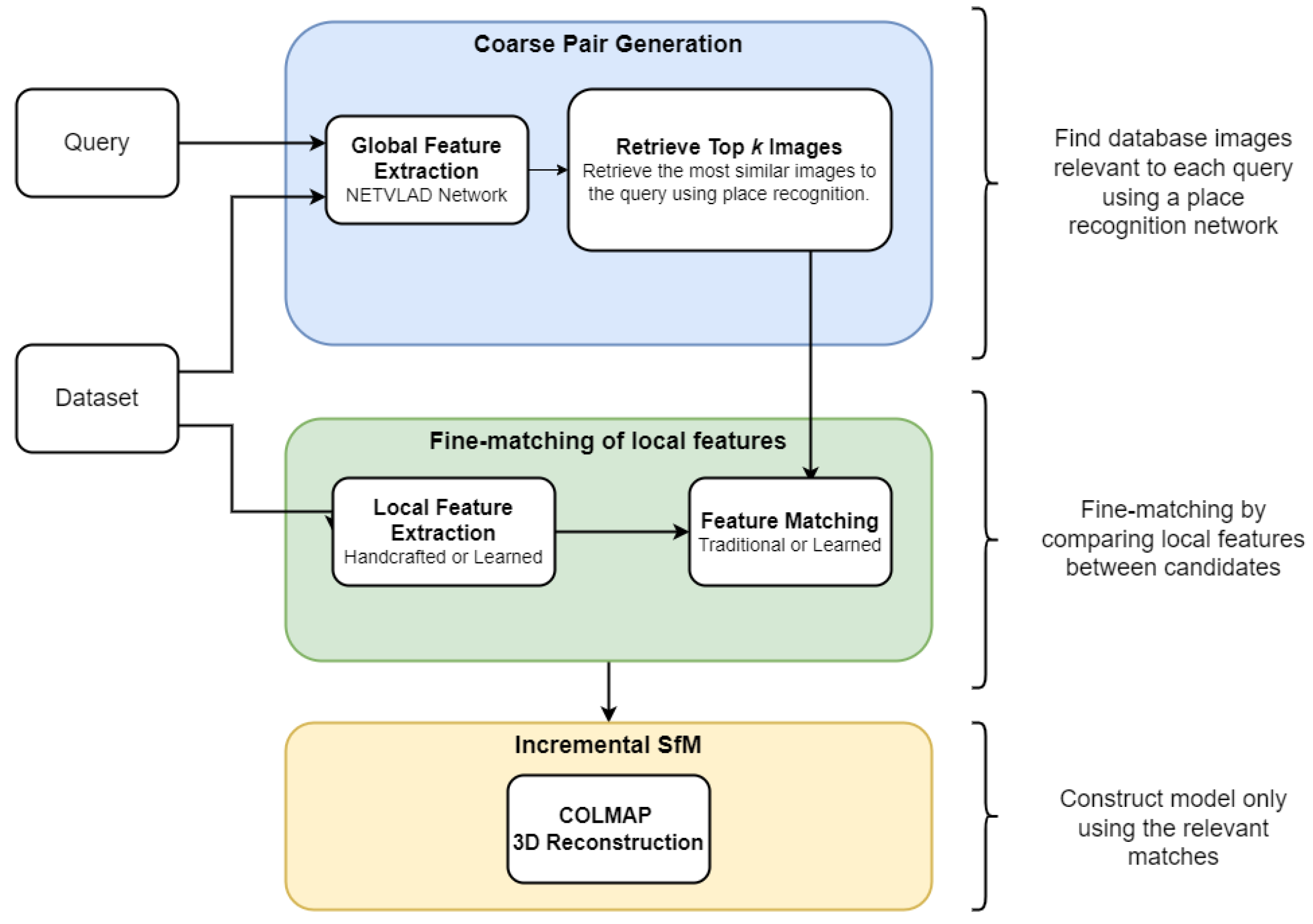
- The retrieval of candidate images through a global search was capped at 50.
- (iii)
- A maximum of 8000 features were extracted per image. It is noted that some algorithms, such as SuperPoint, have a feature extraction limit (e.g., 4096 features).
- (iv)
- Image resizing for deep learning methods was based on a maximum dimension of 1024 pixels to preserve the original aspect ratio.
- (v)
- The model that registered the highest number of images was selected for detailed reconstruction quality evaluation.
- (vi)
- For deep learning feature extractors paired with nearest neighbor matching algorithms, Mutual Check was enabled in all combinations. Similarity was computed using the dot product between descriptors, and thresholds were set at 0.8 for NN-Ratio (ratio-based filtering) and 0.7 for NN-Distance (distance-based filtering); no threshold was used for NN-Mutual.
4.3. Metrics
4.3.1. Reconstruction Metrics
- Cloud-to-cloud error distance: Measures the geometric accuracy by quantifying the distance between the reconstructed points and the actual points in the target cloud, indicating the geometric accuracy of the reconstruction. In Cloud Compare (https://www.cloudcompare.org/doc/wiki/index.php/Cloud-to-Cloud_Distance, accessed on 2 June 2024), a surface in the target cloud is first approximated using a quadric model in the local region. The distance is then calculated by finding the nearest point on the model surface to each source point. The quadric model in Cloud Compare is defined with a default setting of neighbors as follows:where Z is the distance between the source and target points, X and Y are the coordinates of the source points, and are the model coefficients. After calculating all distances, the standard deviation and the mean value are calculated and used to report this metric. For construction sites, where precision is critical for the reconstruction analysis, a low cloud-to-cloud error distance indicates that the 3D model closely matches the actual site conditions.
- Mean reprojection error: The average reprojection error across all 3D points that have a recorded error in pixels, calculated aswhere m is the number of 3D points with a recorded error, and is the reprojection error in pixels of the 3D point i. It indicates the precision of the reconstructed points by comparing their projected positions in the images.
- Number of points: The total number of 3D points in the reconstruction that are part of a 3D point track. it reflects the density of the reconstructed model, indicating how detailed and comprehensive the model is.
- Number of observations: The total number of observations of 3D points across all registered images, calculated as:where is the number of 3D points observed in the image . It represents the total of observed 3D points across multiple images, enhancing the reliability and robustness of the reconstruction.
- Mean track length: The average number of images that observe each 3D point, calculated aswhere m is the number of unique 3D points in the reconstruction, and is the total number of observations of 3D points across all registered images. It shows the stability of the 3D points by measuring how many images observe each point. Longer track lengths contribute to more stable and accurate models.
- Avg. number of keypoints: The average number of keypoints extracted from the images. More keypoints generally lead to better feature matching and more detailed reconstructions.
- Avg. number of matches: The average number of valid matches found between pairs of images. More matches indicate better consistency and reliability in feature detection, contributing to more accurate and detailed 3D reconstruction.
- Number of registered images: The total number of images that were successfully registered in the reconstruction. It ensures that a sufficient number of images contribute to the reconstruction, providing comprehensive coverage of the site.
- Mean observations per registered image: The average number of 3D point observations per registered image, calculated aswhere n is the number of registered images, and is the total number of observations of 3D points across all registered images.
4.3.2. Performance Metrics
- Elapsed time: the total time taken to process the images and generate the 3D reconstruction, critical for practical use in time-sensitive construction projects, calculated using the Linux command time.
- Avg. runtime feature extraction: the average time taken to extract features per image, which is the time spent on a key step, highlighting areas for optimization to improve overall efficiency.
- Avg. runtime feature matching: the average time taken to match features per image pair, which is the time spent on a key step, highlighting areas for optimization to improve overall efficiency.
- Avg. runtime global search: the average time taken to retrieve candidate images using NETVLAD [48], which is crucial for handling large datasets typical in construction site surveys.
- CPU usage: The percentage of CPU usage during the process, calculated using the Linux command time. In a multicore system, the percentage can be higher than 100%. It is calculated as,
- RAM usage: The amount of RAM used during the process, calculated using the Linux command time. It measures the maximum resident set size, which is the peak amount of memory the process used during its execution.
- GPU usage: the average percentage of GPU usage during the process, calculated using the Linux command nvidia-smi.
- GPU memory usage: the maximum amount of GPU memory used during the process, calculated using the Linux command nvidia-smi.
- Disk usage: the amount of disk space used after the process has been completed, calculated using the python library OS.
4.4. Datasets
4.4.1. Indoor Scenes
4.4.2. Outdoor Scenes
5. Results
5.1. Reconstruction Evaluation
5.1.1. Visual Qualitative Comparison
5.1.2. Corridor Misalignment
5.1.3. Indoor Scenes
5.1.4. Outdoor Scenes
5.2. Performance Evaluation
5.2.1. Indoor Scenes
5.2.2. Outdoor Scenes
6. Conclusions
- Traditional methods demonstrated robustness and consistency in feature matching, albeit with low overall performance. These methods were more effective in maintaining reliable scene overlap and producing accurate reconstructions in scenarios with sufficient visual features and good lighting conditions, as seen on the private dataset. However, compared to point clouds generated by deep learning methods, they were less detailed and had a larger number of missing areas.
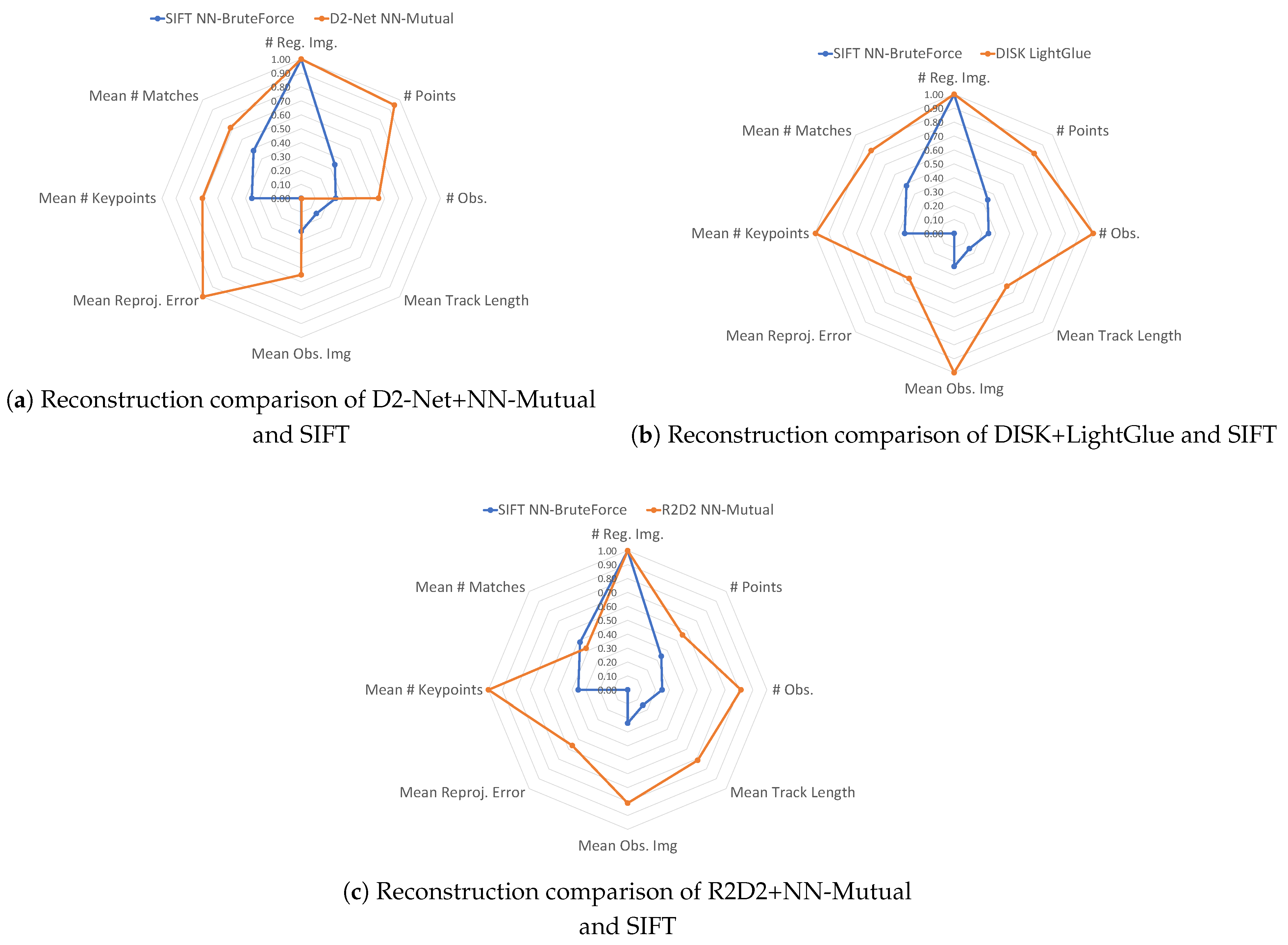
- Deep learning-based methods consistently outperformed traditional methods in terms of reconstruction quality, particularly in challenging scenarios with complex lighting conditions, where over- and under-exposure were common and featureless areas like walls and floors were present. This outcome can be attributed to the sophisticated feature extraction inherent in these methods, which facilitated a more effective identification and matching of features across image pairs and the datasets they were trained on. For instance, R2D2 and DISK, trained on outdoor datasets such as MegaDepth [47] and Aachen [39,40], were identified as the most effective methods in terms of reconstruction quality and performance within the outdoor scenes, indicating that the training data played a significant role in the performance of the methods.
- Deep learning methods were more efficient in terms of processing time and resource consumption, leveraging modern hardware capabilities to enhance performance, which demonstrated exceptional efficiency in feature extraction and matching thanks to the GPU acceleration.
- The map error observed in the ConSLAM dataset highlighted the challenges of maintaining consistent feature matching in complex scenes, emphasizing the importance of selecting appropriate techniques based on the specific characteristics of the scene. This error was attributed to the similarity of the images taken in specific regions of the scene, leading to keypoints being mistakenly identified as valid matches between image pairs. Notably, SuperPoint with SuperGlue-Fast was able to reconstruct the map successfully, indicating that specific configurations and tuning may be necessary to achieve optimal performance in challenging scenarios. Metrics from this dataset should be considered with caution, as only one map was capable of reconstructing the scene.
- The evaluation of cloud-to-cloud distances provided valuable insights into the accuracy of the 3D reconstructions. Most deep learning-based methods demonstrated superior performance in terms of mean distance and standard deviation, indicating high precision and consistency. Compared to SIFT, these methods tended to produce point clouds with a better appearance and fewer missing areas. Cloud-to-cloud distances served as a more direct measure of reconstruction accuracy, provided the reconstructions were successfully generated and sufficiently dense.
- Matching techniques like nearest neighbor (NN), when used with deep learning, showed comparable performance to tailored matching techniques like LightGlue and SuperGlue, indicating that traditional matching techniques can still be effective in certain scenarios, like indoor scenes. However, the tailored matching techniques were more consistent and robust across both datasets, suggesting that they may be more suitable for an overall reconstruction process without the need for manual tuning or adjustments.
Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Agarwal, S.; Furukawa, Y.; Snavely, N.; Simon, I.; Curless, B.; Seitz, S.M.; Szeliski, R. Building rome in a day. Commun. ACM 2011, 54, 105–112. [Google Scholar] [CrossRef]
- Frahm, J.M.; Fite-Georgel, P.; Gallup, D.; Johnson, T.; Raguram, R.; Wu, C.; Jen, Y.H.; Dunn, E.; Clipp, B.; Lazebnik, S.; et al. Building rome on a cloudless day. In Proceedings of the Computer Vision–ECCV 2010: 11th European Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; Proceedings, Part IV 11. Springer: Berlin/Heidelberg, Germany, 2010; pp. 368–381. [Google Scholar]
- Heinly, J.; Schonberger, J.L.; Dunn, E.; Frahm, J.M. Reconstructing the world* in six days*(as captured by the yahoo 100 million image dataset). In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3287–3295. [Google Scholar]
- Schonberger, J.L.; Frahm, J.M. Structure-from-motion revisited. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4104–4113. [Google Scholar]
- Wei, Y.m.; Kang, L.; Yang, B.; Wu, L.d. Applications of structure from motion: A survey. J. Zhejiang Univ. Sci. C 2013, 14, 486–494. [Google Scholar] [CrossRef]
- Karsch, K.; Golparvar-Fard, M.; Forsyth, D. ConstructAide: Analyzing and visualizing construction sites through photographs and building models. ACM Trans. Graph. (TOG) 2014, 33, 1–11. [Google Scholar] [CrossRef]
- Khaloo, A.; Lattanzi, D.; Cunningham, K.; Dell’Andrea, R.; Riley, M. Unmanned aerial vehicle inspection of the Placer River Trail Bridge through image-based 3D modelling. Struct. Infrastruct. Eng. 2018, 14, 124–136. [Google Scholar] [CrossRef]
- Xiong, X.; Adan, A.; Akinci, B.; Huber, D. Automatic creation of semantically rich 3D building models from laser scanner data. Autom. Constr. 2013, 31, 325–337. [Google Scholar] [CrossRef]
- Olsen, M.J.; Kuester, F.; Chang, B.J.; Hutchinson, T.C. Terrestrial laser scanning-based structural damage assessment. J. Comput. Civ. Eng. 2010, 24, 264–272. [Google Scholar] [CrossRef]
- Tang, P.; Huber, D.; Akinci, B.; Lipman, R.; Lytle, A. Automatic reconstruction of as-built building information models from laser-scanned point clouds: A review of related techniques. Autom. Constr. 2010, 19, 829–843. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Tuytelaars, T.; Van Gool, L. Surf: Speeded up robust features. In Proceedings of the Computer Vision–ECCV 2006: 9th European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; Proceedings, Part I 9. Springer: Berlin/Heidelberg, Germany, 2006; pp. 404–417. [Google Scholar]
- Alcantarilla, P.F.; Solutions, T. Fast explicit diffusion for accelerated features in nonlinear scale spaces. IEEE Trans. Patt. Anal. Mach. Intell 2011, 34, 1281–1298. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Pusztai, Z.; Hajder, L. Quantitative Comparison of Feature Matchers Implemented in OpenCV3. In Proceedings of the 21st Computer Vision Winter Workshop, Rimske Toplice, Slovenia, 3–5 February 2016; Slovenian Pattern Recognition Society: Ljubljana, Slovenia, 2016; pp. 1–9. [Google Scholar]
- Özyeşil, O.; Voroninski, V.; Basri, R.; Singer, A. A survey of structure from motion*. Acta Numer. 2017, 26, 305–364. [Google Scholar] [CrossRef]
- Jin, Y.; Mishkin, D.; Mishchuk, A.; Matas, J.; Fua, P.; Yi, K.M.; Trulls, E. Image matching across wide baselines: From paper to practice. Int. J. Comput. Vis. 2021, 129, 517–547. [Google Scholar] [CrossRef]
- Schonberger, J.L.; Hardmeier, H.; Sattler, T.; Pollefeys, M. Comparative evaluation of hand-crafted and learned local features. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1482–1491. [Google Scholar]
- Dusmanu, M.; Rocco, I.; Pajdla, T.; Pollefeys, M.; Sivic, J.; Torii, A.; Sattler, T. D2-net: A trainable cnn for joint description and detection of local features. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 8084–8093. [Google Scholar]
- Revaud, J.; De Souza, C.; Humenberger, M.; Weinzaepfel, P. R2d2: Reliable and repeatable detector and descriptor. Adv. Neural Inf. Process. Syst. 2019, 32, 12414–12424. [Google Scholar]
- Sarlin, P.E.; DeTone, D.; Malisiewicz, T.; Rabinovich, A. Superglue: Learning feature matching with graph neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 4938–4947. [Google Scholar]
- Tyszkiewicz, M.; Fua, P.; Trulls, E. DISK: Learning local features with policy gradient. Adv. Neural Inf. Process. Syst. 2020, 33, 14254–14265. [Google Scholar]
- DeTone, D.; Malisiewicz, T.; Rabinovich, A. Superpoint: Self-supervised interest point detection and description. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Salt Lake City, UT, USA, 18–22 June 2018; pp. 224–236. [Google Scholar]
- Martell, A.; Lauterbach, H.A.; Nuchtcer, A. Benchmarking structure from motion algorithms of urban environments with applications to reconnaissance in search and rescue scenarios. In Proceedings of the 2018 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, USA, 6–8 August 2018; pp. 1–7. [Google Scholar]
- Knapitsch, A.; Park, J.; Zhou, Q.Y.; Koltun, V. Tanks and temples: Benchmarking large-scale scene reconstruction. ACM Trans. Graph. (ToG) 2017, 36, 1–13. [Google Scholar] [CrossRef]
- Balntas, V.; Lenc, K.; Vedaldi, A.; Mikolajczyk, K. HPatches: A benchmark and evaluation of handcrafted and learned local descriptors. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 5173–5182. [Google Scholar]
- Fan, B.; Kong, Q.; Wang, X.; Wang, Z.; Xiang, S.; Pan, C.; Fua, P. A performance evaluation of local features for image-based 3D reconstruction. IEEE Trans. Image Process. 2019, 28, 4774–4789. [Google Scholar] [CrossRef] [PubMed]
- Tareen, S.A.K.; Saleem, Z. A comparative analysis of sift, surf, kaze, akaze, orb, and brisk. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies (iCoMET), Sukkur, Pakistan, 3–4 March 2018; pp. 1–10. [Google Scholar]
- Bartol, K.; Bojanić, D.; Pribanić, T.; Petković, T.; Donoso, Y.; Mas, J. On the comparison of classic and deep keypoint detector and descriptor methods. In Proceedings of the 2019 11th International Symposium on Image and Signal Processing and Analysis (ISPA), Dubrovnik, Croatia, 23–25 September 2019; pp. 64–69. [Google Scholar]
- Remondino, F.; Menna, F.; Morelli, L. Evaluating hand-crafted and learning-based features for photogrammetric applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 549–556. [Google Scholar] [CrossRef]
- Ruano, S.; Smolic, A. A Benchmark for 3D Reconstruction from Aerial Imagery in an Urban Environment. In Proceedings of the VISIGRAPP (5: VISAPP); SciTePress: Setúbal, Portugal, 2021; pp. 732–741. [Google Scholar]
- Corradetti, A.; Seers, T.; Mercuri, M.; Calligaris, C.; Busetti, A.; Zini, L. Benchmarking different SfM-MVS photogrammetric and iOS LiDAR acquisition methods for the digital preservation of a short-lived excavation: A case study from an area of sinkhole related subsidence. Remote Sens. 2022, 14, 5187. [Google Scholar] [CrossRef]
- Rosten, E.; Drummond, T. Machine learning for high-speed corner detection. In Proceedings of the Computer Vision–ECCV 2006: 9th European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; Proceedings, Part I 9. Springer: Berlin/Heidelberg, Germany, 2006; pp. 430–443. [Google Scholar]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. Brief: Binary robust independent elementary features. In Proceedings of the Computer Vision–ECCV 2010: 11th European Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; Proceedings, Part IV 11. Springer: Berlin/Heidelberg, Germany, 2010; pp. 778–792. [Google Scholar]
- Mikolajczyk, K.; Schmid, C. Indexing based on scale invariant interest points. In Proceedings of the Proceedings Eighth IEEE International Conference on Computer Vision. ICCV 2001, Vancouver, BC, Canada, 7–14 July 2001; Volume 1, pp. 525–531. [Google Scholar]
- Alcantarilla, P.F.; Bartoli, A.; Davison, A.J. KAZE features. In Proceedings of the Computer Vision–ECCV 2012: 12th European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Proceedings, Part VI 12. Springer: Berlin/Heidelberg, Germany, 2012; pp. 214–227. [Google Scholar]
- He, K.; Lu, Y.; Sclaroff, S. Local descriptors optimized for average precision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 596–605. [Google Scholar]
- Novotny, D.; Albanie, S.; Larlus, D.; Vedaldi, A. Self-supervised learning of geometrically stable features through probabilistic introspection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 3637–3645. [Google Scholar]
- Sattler, T.; Maddern, W.; Toft, C.; Torii, A.; Hammarstrand, L.; Stenborg, E.; Safari, D.; Okutomi, M.; Pollefeys, M.; Sivic, J.; et al. Benchmarking 6dof outdoor visual localization in changing conditions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8601–8610. [Google Scholar]
- Sattler, T.; Weyand, T.; Leibe, B.; Kobbelt, L. Image Retrieval for Image-Based Localization Revisited. In Proceedings of the BMVC, Surrey, UK, 3–7 September 2012; Volume 1, p. 4. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In Proceedings of the Computer Vision–ECCV 2014: 13th European Conference, Zurich, Switzerland, 6–12 September 2014; Proceedings, Part V 13. Springer: Berlin/Heidelberg, Germany, 2014; pp. 740–755. [Google Scholar]
- Tian, Y.; Yu, X.; Fan, B.; Wu, F.; Heijnen, H.; Balntas, V. Sosnet: Second order similarity regularization for local descriptor learning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 11016–11025. [Google Scholar]
- Cavalli, L.; Larsson, V.; Oswald, M.; Sattler, T.; Pollefeys, M. Adalam: Revisiting handcrafted outlier detection. arXiv 2020, arXiv:2006.04250. [Google Scholar]
- Radenović, F.; Iscen, A.; Tolias, G.; Avrithis, Y.; Chum, O. Revisiting Oxford and Paris: Large-Scale Image Retrieval Benchmarking. In Proceedings of the CVPR, Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Lindenberger, P.; Sarlin, P.E.; Pollefeys, M. Lightglue: Local feature matching at light speed. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 1–6 October 2023; pp. 17627–17638. [Google Scholar]
- Khan, S.; Naseer, M.; Hayat, M.; Zamir, S.W.; Khan, F.S.; Shah, M. Transformers in vision: A survey. ACM Comput. Surv. (CSUR) 2022, 54, 1–41. [Google Scholar] [CrossRef]
- Li, Z.; Snavely, N. Megadepth: Learning single-view depth prediction from internet photos. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2041–2050. [Google Scholar]
- Sarlin, P.E.; Cadena, C.; Siegwart, R.; Dymczyk, M. From coarse to fine: Robust hierarchical localization at large scale. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 12716–12725. [Google Scholar]
- Helmberger, M.; Morin, K.; Berner, B.; Kumar, N.; Cioffi, G.; Scaramuzza, D. The hilti slam challenge dataset. IEEE Robot. Autom. Lett. 2022, 7, 7518–7525. [Google Scholar] [CrossRef]
- Trzeciak, M.; Pluta, K.; Fathy, Y.; Alcalde, L.; Chee, S.; Bromley, A.; Brilakis, I.; Alliez, P. Conslam: Periodically collected real-world construction dataset for SLAM and progress monitoring. In Proceedings of the European Conference on Computer Vision; Springer: Cham, Switzerland, 2022; pp. 317–331. [Google Scholar]
- Oquab, M.; Darcet, T.; Moutakanni, T.; Vo, H.; Szafraniec, M.; Khalidov, V.; Fernandez, P.; Haziza, D.; Massa, F.; El-Nouby, A.; et al. Dinov2: Learning robust visual features without supervision. arXiv 2023, arXiv:2304.07193. [Google Scholar]
- Chen, H.; Luo, Z.; Zhou, L.; Tian, Y.; Zhen, M.; Fang, T.; Mckinnon, D.; Tsin, Y.; Quan, L. Aspanformer: Detector-free image matching with adaptive span transformer. In Proceedings of the European Conference on Computer Vision; Springer: Cham, Switzerland, 2022; pp. 20–36. [Google Scholar]
- Jiang, H.; Karpur, A.; Cao, B.; Huang, Q.; Araujo, A. OmniGlue: Generalizable Feature Matching with Foundation Model Guidance. arXiv 2024, arXiv:2405.12979. [Google Scholar]
- Wang, Q.; Zhang, J.; Yang, K.; Peng, K.; Stiefelhagen, R. Matchformer: Interleaving attention in transformers for feature matching. In Proceedings of the Asian Conference on Computer Vision, Macao, China, 4–8 December 2022; pp. 2746–2762. [Google Scholar]
- Ying, J.; Tong, C.; Sheng, Z.; Yao, B.; Cao, S.Y.; Yu, H.; Shen, H.L. Region-aware RGB and near-infrared image fusion. Pattern Recognit. 2023, 142, 109717. [Google Scholar] [CrossRef]
- Zou, D.; Yang, B.; Li, Y.; Zhang, X.; Pang, L. Visible and NIR image fusion based on multiscale gradient guided edge-smoothing model and local gradient weight. IEEE Sens. J. 2023, 23, 2783–2793. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Description |
|---|---|
| CPU | AMD Ryzen Threadripper 3960X 24-core 48-thread processor |
| RAM | 128 GB |
| Storage | 4 TB NVME SSD |
| GPU | x2 NVIDIA GeForce RTX 3090 |
| GPU Memory | x2 24 GB |
| OS | Ubuntu 20.04.6 LTS |
| Extractors/Matchers | NN-BruteForce | NN-Ratio | NN-Distance | NN-Mutual | SuperGlue | SuperGlue-Fast | LightGlue | AdaLAM |
|---|---|---|---|---|---|---|---|---|
| AKAZE | x | - | - | - | - | - | - | - |
| ORB | x | - | - | - | - | - | - | - |
| SIFT | x | - | - | - | - | - | - | - |
| D2-Net | - | x | x | x | - | - | - | - |
| DISK | - | x | x | x | - | - | x | - |
| R2D2 | - | x | x | x | - | - | - | |
| SuperPoint | - | x | x | x | x | x | x | |
| SOSNet | - | x | x | x | - | - | - | x |
| Extractor | Matcher | No. Reg. Img. | No. Points | No. Obs. | Mean Track Length | Mean Obs. Per Img | Mean Reproj. Error | Mean No. Keypoints | Mean No. Matches |
|---|---|---|---|---|---|---|---|---|---|
| (a) Reconstruction results on the ConSLAM dataset. | |||||||||
| AKAZE | NN-BruteForce | 598 | 162,116 | 1,278,721 | 7.89 | 2138.33 | 1.07 | 4,694.114 | 1,379.82 |
| SIFT | NN-BruteForce | 605 | 157,949 | 907,951 | 5.75 | 1500.75 | 0.71 | 4107.1714 | 1023.93 |
| ORB | NN-BruteForce | 768 | 217,321 | 2,289,941 | 10.54 | 2981.69 | 1.12 | 7485.8937 | 1833.36 |
| D2-Net | NN-Mutual | 780 | 364,527 | 1,557,653 | 4.27 | 1996.99 | 1.50 | 4442.129 | 1054.82 |
| NN-Ratio | 336 | 46,033 | 226,822 | 4.93 | 675.07 | 1.46 | 90.70 | ||
| NN-Distance | 780 | 261,884 | 1,201,174 | 4.59 | 1539.97 | 1.53 | 314.36 | ||
| DISK | LightGlue | 783 | 536,211 | 3,780,568 | 7.05 | 4828.31 | 1.35 | 6568.7982 | 1122.41 |
| NN-Mutual | 783 | 469,707 | 3,378,905 | 7.19 | 4315.33 | 1.29 | 1029.01 | ||
| NN-Ratio | 772 | 263,240 | 2,155,316 | 8.19 | 2791.86 | 1.16 | 373.46 | ||
| NN-Distance | 772 | 344,770 | 2,661,758 | 7.72 | 3447.87 | 1.24 | 547.49 | ||
| R2D2 | NN-Mutual | 783 | 349,930 | 3,553,683 | 10.16 | 4538.55 | 1.44 | 7995.1648 | 810.12 |
| NN-Ratio | 485 | 122,945 | 1,104,995 | 8.99 | 2278.34 | 1.26 | 202.57 | ||
| NN-Distance | 783 | 347,882 | 3,539,670 | 10.17 | 4520.65 | 1.44 | 804.78 | ||
| SOSNet | Adalam | 481 | 38,770 | 248,663 | 6.41 | 516.97 | 1.09 | 1028.1328 | 148.30 |
| NN-Mutual | 477 | 43,176 | 254,733 | 5.90 | 534.03 | 1.07 | 341.13 | ||
| NN-Ratio | 474 | 29,302 | 201,975 | 6.89 | 426.11 | 1.02 | 78.60 | ||
| NN-Distance | 647 | 41,542 | 280,855 | 6.76 | 434.09 | 1.04 | 79.60 | ||
| SuperPoint | NN-Mutual | 713 | 102,468 | 665,417 | 6.49 | 933.26 | 1.34 | 1532.0166 | 530.73 |
| NN-Ratio | 648 | 56,062 | 454,708 | 8.11 | 701.71 | 1.30 | 115.75 | ||
| NN-Distance | 780 | 93,849 | 679,938 | 7.25 | 871.72 | 1.36 | 203.65 | ||
| SuperGlue | 782 | 124,437 | 830,524 | 6.67 | 1062.05 | 1.39 | 293.23 | ||
| SuperGlue-Fast | 781 | 123,910 | 823,766 | 6.65 | 1054.76 | 1.39 | 305.16 | ||
| LightGlue | 781 | 122,568 | 825,248 | 6.73 | 1056.66 | 1.39 | 286.78 | ||
| (b) Reconstruction results on the Hilti dataset. | |||||||||
| AKAZE | NN-BruteForce | 321 | 13,797 | 90,506 | 6.56 | 281.95 | 1.16 | 458.6778 | 144.55 |
| SIFT | NN-BruteForce | 452 | 24,355 | 130,712 | 5.37 | 289.19 | 0.80 | 580.8544 | 162.72 |
| ORB | NN-BruteForce | 953 | 87,726 | 749,104 | 8.54 | 786.05 | 1.10 | 2140.8402 | 551.43 |
| D2-Net | NN-Mutual | 957 | 216,417 | 1,308,981 | 6.05 | 1367.80 | 1.38 | 2312.9816 | 579.80 |
| NN-Ratio | 43 | 3871 | 48,141 | 12.44 | 1119.56 | 1.13 | 91.12 | ||
| NN-Distance | 651 | 79,271 | 552,331 | 6.97 | 848.43 | 1.41 | 218.24 | ||
| DISK | LightGlue | 920 | 288,775 | 3,005,325 | 10.41 | 3266.66 | 0.99 | 4128.4682 | 775.60 |
| NN-Mutual | 967 | 309,370 | 2,799,201 | 9.05 | 2894.73 | 0.88 | 866.34 | ||
| NN-Ratio | 704 | 136,753 | 1,421,581 | 10.40 | 2019.29 | 0.76 | 454.50 | ||
| NN-Distance | 673 | 115,683 | 1,199,493 | 10.37 | 1782.31 | 0.64 | 404.79 | ||
| R2D2 | NN-Mutual | 956 | 273,521 | 3,364,291 | 12.30 | 3519.13 | 0.91 | 6618.2336 | 878.93 |
| NN-Ratio | 974 | 243,966 | 3,217,281 | 13.19 | 3303.16 | 0.90 | 767.43 | ||
| NN-Distance | 233 | 34,962 | 510,494 | 14.60 | 2190.96 | 0.67 | 349.81 | ||
| SOSNet | Adalam | 576 | 21,161 | 118,795 | 5.61 | 206.24 | 0.92 | 290.4109 | 97.47 |
| NN-Mutual | 121 | 2652 | 18,944 | 7.14 | 156.56 | 0.76 | 25.98 | ||
| NN-Ratio | 66 | 2555 | 10,310 | 4.04 | 156.21 | 0.66 | 65.81 | ||
| NN-Distance | 55 | 1251 | 6153 | 4.92 | 111.87 | 0.62 | 25.47 | ||
| SuperPoint | NN-Mutual | 757 | 37,866 | 319,856 | 8.45 | 422.53 | 1.06 | 509.4252 | 98.37 |
| NN-Ratio | 763 | 38,158 | 310,980 | 8.15 | 407.58 | 1.05 | 95.37 | ||
| NN-Distance | 689 | 37,469 | 260,311 | 6.95 | 377.81 | 0.99 | 162.16 | ||
| SuperGlue | 705 | 46,798 | 261,746 | 5.59 | 371.27 | 1.17 | 100.28 | ||
| SuperGlue-Fast | 260 | 10,022 | 90,903 | 9.07 | 349.63 | 0.97 | 81.25 | ||
| LightGlue | 43 | 698 | 12,696 | 18.19 | 295.26 | 0.57 | 46.49 | ||
| ConSLAM—Sequence 2 | Hilti—Construction Upper Level 1 | ||||||
|---|---|---|---|---|---|---|---|
| Extractor | Matcher | ICP Scale | Mean | STD | ICP Scale | Mean | STD |
| AKAZE | NN-BruteForce | 0.70 | 0.07 | 0.19 | 1.00 | 0.33 | 0.47 |
| ORB | NN-BruteForce | - | - | - | - | - | - |
| D2-Net | NN-Mutual | 1.00 | 0.10 | 0.32 | 0.67 | 0.23 | 0.49 |
| NN-Ratio | 1.00 | 0.23 | 0.38 | - | - | - | |
| NN-Distance | 1.00 | 0.26 | 0.73 | 1.00 | 0.21 | 0.34 | |
| DISK | LightGlue | 1.00 | 0.12 | 0.21 | 1.00 | 0.26 | 1.40 |
| NN-Mutual | 1.00 | 0.08 | 0.17 | 1.00 | 0.30 | 2.22 | |
| NN-Ratio | 1.00 | 0.11 | 0.28 | 1.00 | 0.18 | 0.79 | |
| NN-Distance | 1.00 | 0.18 | 0.53 | 1.00 | 0.20 | 1.22 | |
| R2D2 | NN-Mutual | 1.00 | 0.10 | 0.34 | 1.00 | 0.55 | 3.38 |
| NN-Ratio | 1.00 | 0.11 | 0.12 | 0.91 | 0.07 | 0.07 | |
| NN-Distance | 1.00 | 0.09 | 0.35 | 1.00 | 0.28 | 1.47 | |
| SOSNet | Adalam | 1.00 | 0.43 | 0.83 | 1.00 | 0.34 | 0.63 |
| NN-Mutual | 1.00 | 0.10 | 0.16 | 1.00 | 0.45 | 2.51 | |
| NN-Ratio | 1.00 | 0.36 | 0.90 | 1.00 | 0.45 | 0.36 | |
| NN-Distance | 1.00 | 0.30 | 0.75 | - | - | - | |
| SuperPoint | NN-Mutual | 1.00 | 0.17 | 1.45 | 0.68 | 0.30 | 1.90 |
| NN-Ratio | 1.00 | 0.07 | 0.20 | - | - | - | |
| NN-Distance | 1.00 | 0.10 | 0.28 | 0.55 | 0.44 | 2.84 | |
| SuperGlue | 1.00 | 0.14 | 0.42 | 1.00 | 0.67 | 5.17 | |
| SuperGlue-Fast | 1.00 | 0.26 | 0.48 | 1.00 | 0.62 | 2.61 | |
| LightGlue | 1.00 | 0.15 | 0.33 | 1.00 | 1.15 | 4.54 | |
| Extractor | Matcher | No. Reg. Img. | No. Points | No. Obs. | Mean Track Length | Mean Obs. Img | Mean Reproj. Error | Mean No. Keypoints | Mean No. Matches |
|---|---|---|---|---|---|---|---|---|---|
| (a) Reconstruction results of Hilti’s dataset. | |||||||||
| AKAZE | NN-BruteForce | 321 | 13,797 | 90,506 | 6.56 | 281.95 | 1.16 | 458.68 | 144.55 |
| SIFT | NN-BruteForce | 452 | 24,355 | 130,712 | 5.37 | 289.19 | 0.80 | 580.85 | 162.72 |
| ORB | NN-BruteForce | 953 | 87,726 | 749,104 | 8.54 | 786.05 | 1.10 | 2140.84 | 551.43 |
| D2-Net | NN-Mutual | 651 | 79,271 | 552,331 | 6.97 | 848.43 | 1.41 | 2312.98 | 218.24 |
| NN-Ratio | 43 | 3871 | 48,141 | 12.44 | 1119.56 | 1.13 | 91.12 | ||
| NN-Distance | 957 | 216,417 | 1,308,981 | 6.05 | 1367.80 | 1.38 | 579.80 | ||
| DISK | LightGlue | 673 | 115,683 | 1,199,493 | 10.37 | 1782.31 | 0.64 | 4128.47 | 404.79 |
| NN-Mutual | 704 | 136,753 | 1,421,581 | 10.40 | 2019.29 | 0.76 | 454.50 | ||
| NN-Ratio | 967 | 309,370 | 2,799,201 | 9.05 | 2894.73 | 0.88 | 866.34 | ||
| NN-Distance | 920 | 288,775 | 3,005,325 | 10.41 | 3266.66 | 0.99 | 775.60 | ||
| R2D2 | NN-Mutual | 233 | 34,962 | 510,494 | 14.60 | 2190.96 | 0.67 | 6618.23 | 349.81 |
| NN-Ratio | 956 | 273,521 | 3,364,291 | 12.30 | 3519.13 | 0.91 | 878.93 | ||
| NN-Distance | 974 | 243,966 | 3,217,281 | 13.19 | 3303.16 | 0.90 | 767.43 | ||
| SOSNet | Adalam | 121 | 2652 | 18,944 | 7.14 | 156.56 | 0.76 | 290.41 | 25.98 |
| NN-Mutual | 576 | 21,161 | 118,795 | 5.61 | 206.24 | 0.92 | 97.47 | ||
| NN-Ratio | 55 | 1251 | 6153 | 4.92 | 111.87 | 0.62 | 25.47 | ||
| NN-Distance | 66 | 2555 | 10,310 | 4.04 | 156.21 | 0.66 | 65.81 | ||
| SuperPoint | NN-Mutual | 43 | 698 | 12,696 | 18.19 | 295.26 | 0.57 | 509.43 | 46.49 |
| NN-Ratio | 763 | 38,158 | 310,980 | 8.15 | 407.58 | 1.05 | 95.37 | ||
| NN-Distance | 260 | 10,022 | 90,903 | 9.07 | 349.63 | 0.97 | 81.25 | ||
| SuperGlue | 689 | 37,469 | 260,311 | 6.95 | 377.81 | 0.99 | 162.16 | ||
| SuperGlue-Fast | 705 | 46,798 | 261,746 | 5.59 | 371.27 | 1.17 | 100.28 | ||
| LightGlue | 757 | 37,866 | 319,856 | 8.45 | 422.53 | 1.06 | 98.37 | ||
| (b) Reconstruction results on the private dataset. | |||||||||
| AKAZE | NN-BruteForce | 477 | 49,652 | 597,559 | 12.03 | 1252.74 | 0.85 | 1569.00 | 557.31 |
| SIFT | NN-BruteForce | 477 | 158,408 | 1,121,996 | 7.08 | 2352.19 | 0.62 | 3515.05 | 1142.23 |
| ORB | NN-BruteForce | 477 | 174,582 | 2,677,935 | 15.34 | 5614.12 | 1.00 | 7614.78 | 2204.80 |
| D2-Net | NN-Mutual | 477 | 380,502 | 2,129,293 | 5.60 | 4463.93 | 1.55 | 5984.59 | 1623.07 |
| NN-Ratio | 477 | 108,983 | 654,832 | 6.01 | 1372.81 | 1.32 | 170.39 | ||
| NN-Distance | 477 | 288,048 | 1,604,316 | 5.57 | 3363.35 | 1.51 | 546.26 | ||
| DISK | LightGlue | 477 | 331,537 | 3,582,694 | 10.81 | 7510.89 | 1.04 | 7967.76 | 1880.21 |
| NN-Mutual | 477 | 399,953 | 3,450,039 | 8.63 | 7232.79 | 0.90 | 1757.26 | ||
| NN-Ratio | 477 | 376,608 | 2,973,756 | 7.90 | 6234.29 | 0.75 | 825.97 | ||
| NN-Distance | 477 | 386,539 | 3,015,828 | 7.80 | 6322.49 | 0.77 | 867.81 | ||
| R2D2 | NN-Mutual | 477 | 237,509 | 2,974,663 | 12.52 | 6236.19 | 1.14 | 8000 | 1015.63 |
| NN-Ratio | 477 | 212,481 | 1,590,765 | 7.49 | 3334.94 | 0.87 | 325.12 | ||
| NN-Distance | 477 | 237,136 | 2,974,582 | 12.54 | 6236.02 | 1.14 | 1015.04 | ||
| SOSNet | Adalam | 477 | 55,904 | 481,336 | 8.61 | 1009.09 | 0.86 | 1325.63 | 213.92 |
| NN-Mutual | 477 | 65,807 | 507,848 | 7.72 | 1064.67 | 0.86 | 506.20 | ||
| NN-Ratio | 477 | 50,713 | 417,985 | 8.24 | 876.28 | 0.74 | 158.90 | ||
| NN-Distance | 357 | 38,796 | 310,958 | 8.02 | 871.03 | 0.68 | 147.91 | ||
| SuperPoint | NN-Mutual | 477 | 41,489 | 433,872 | 10.46 | 909.58 | 1.18 | 1048.51 | 447.31 |
| NN-Ratio | 477 | 33,026 | 356,243 | 10.79 | 746.84 | 1.07 | 160.99 | ||
| NN-Distance | 477 | 36,591 | 400,741 | 10.95 | 840.13 | 1.14 | 229.74 | ||
| SuperGlue | 477 | 38,658 | 448,101 | 11.59 | 939.42 | 1.26 | 343.53 | ||
| SuperGlue-Fast | 477 | 39,565 | 450,761 | 11.39 | 944.99 | 1.26 | 355.03 | ||
| LightGlue | 477 | 38,147 | 447,215 | 11.72 | 937.56 | 1.26 | 338.02 | ||
| Private—Construction Site Outdoor | Hilti—Construction Site Outdoor 1 | ||||||
|---|---|---|---|---|---|---|---|
| Extractor | Matcher | ICP Scale | Mean | STD | ICP Scale | Mean | STD |
| AKAZE | NN-BruteForce | 1.00 | 0.19 | 0.95 | 1.00 | 0.09 | 0.32 |
| ORB | NN-BruteForce | 1.00 | 0.16 | 0.80 | - | - | - |
| D2-Net | NN-Mutual | 1.00 | 0.25 | 1.02 | 1.00 | 0.10 | 0.58 |
| NN-Ratio | 1.00 | 0.14 | 0.47 | 1.00 | 0.11 | 0.39 | |
| NN-Distance | 1.00 | 0.18 | 0.64 | 1.00 | 0.16 | 0.72 | |
| DISK | LightGlue | 1.00 | 0.12 | 0.43 | 1.00 | 0.09 | 0.72 |
| NN-Mutual | 1.00 | 0.10 | 0.45 | 1.00 | 0.08 | 1.13 | |
| NN-Ratio | 1.00 | 0.05 | 0.17 | 1.00 | 0.09 | 1.06 | |
| NN-Distance | 1.00 | 0.06 | 0.27 | 1.00 | 0.07 | 0.52 | |
| R2D2 | NN-Mutual | 1.00 | 0.14 | 0.62 | 1.00 | 0.10 | 0.58 |
| NN-Ratio | 1.00 | 0.06 | 0.22 | 1.00 | 0.08 | 0.30 | |
| NN-Distance | 1.00 | 0.15 | 0.63 | 1.00 | 0.10 | 0.65 | |
| SOSNet | Adalam | 1.00 | 0.15 | 0.74 | 1.00 | 0.07 | 0.60 |
| NN-Mutual | 1.00 | 0.18 | 0.96 | 1.00 | 0.18 | 1.35 | |
| NN-Ratio | 1.00 | 0.10 | 0.59 | 1.00 | 0.07 | 0.43 | |
| NN-Distance | 0.82 | 0.06 | 0.41 | 1.00 | 0.07 | 0.25 | |
| SuperPoint | NN-Mutual | 1.00 | 0.24 | 1.00 | 1.00 | 0.13 | 0.96 |
| NN-Ratio | 1.00 | 0.16 | 0.87 | 1.00 | 0.13 | 1.08 | |
| NN-Distance | 1.00 | 0.21 | 1.07 | 1.00 | 0.16 | 1.25 | |
| SuperGlue | 1.00 | 0.31 | 1.24 | 1.00 | 0.12 | 0.76 | |
| SuperGlue-Fast | 1.00 | 0.31 | 1.30 | 1.00 | 0.12 | 0.72 | |
| LightGlue | 1.00 | 0.29 | 1.10 | 1.00 | 0.12 | 0.75 | |
| Extractor | Matcher | Elapsed Time (hr) | Mean Runtime Feature Extraction (ms) | Mean Runtime Feature Matching (ms) | Mean Runtime Global Search (ms) | CPU Usage (%) | RAM Usage (GB) | GPU Usage (%) | GPU Mem. Usage (GB) | Disk Usage (GB) |
|---|---|---|---|---|---|---|---|---|---|---|
| (a) Performance results on the ConSLAM dataset. | ||||||||||
| AKAZE | NN-BruteForce | 1.71 | 2156.184 | 799.003 | 3.0804 | 64.33 | 14.30 | 0.19 | 2.58 | 1.08 |
| SIFT | NN-BruteForce | 1.20 | 2229.797 | 1236.313 | 3.3245 | 70.77 | 25.50 | 3.49 | 2.73 | 2.20 |
| ORB | NN-BruteForce | 3.39 | 106.054 | 1485.637 | 3.1052 | 66.67 | 5.15 | 0.12 | 2.89 | 1.33 |
| D2-Net | NN-Mutual | 1.80 | 119.202 | 3.884 | 2.9736 | 43.38 | 4.68 | 2.94 | 2.80 | 4.29 |
| NN-Ratio | 0.31 | 120.850 | 3.926 | 3.0212 | 21.02 | 2.90 | 8.30 | 2.80 | 3.93 | |
| NN-Distance | 1.22 | 120.850 | 3.893 | 2.9736 | 39.71 | 4.07 | 3.41 | 2.80 | 4.09 | |
| DISK | LightGlue | 2.58 | 79.041 | 41.921 | 3.0231 | 38.19 | 7.03 | 7.55 | 5.52 | 2.64 |
| NN-Mutual | 2.15 | 79.163 | 4.965 | 2.8763 | 45.31 | 6.30 | 3.02 | 3.33 | 2.56 | |
| NN-Ratio | 0.81 | 79.163 | 5.006 | 2.8839 | 34.27 | 4.76 | 5.13 | 3.32 | 2.32 | |
| NN-Distance | 1.20 | 79.163 | 4.964 | 2.9106 | 39.44 | 5.38 | 4.03 | 3.32 | 2.39 | |
| R2D2 | NN-Mutual | 1.85 | 173.218 | 6.927 | 2.9507 | 44.65 | 6.18 | 4.16 | 3.48 | 2.92 |
| NN-Ratio | 0.57 | 173.218 | 6.996 | 2.943 | 24.27 | 3.80 | 9.46 | 3.23 | 2.65 | |
| NN-Distance | 1.92 | 172.852 | 6.953 | 2.9678 | 45.21 | 6.13 | 4.07 | 3.23 | 2.92 | |
| SOSNet | Adalam | 0.34 | 272.461 | 8.774 | 9.3307 | 25.98 | 3.74 | 4.88 | 3.05 | 0.48 |
| NN-Mutual | 0.51 | 278.076 | 1.500 | 9.2239 | 39.67 | 3.74 | 2.64 | 3.04 | 0.51 | |
| NN-Ratio | 0.35 | 273.193 | 1.679 | 9.1095 | 24.88 | 3.70 | 3.08 | 3.04 | 0.42 | |
| NN-Distance | 0.38 | 269.043 | 1.597 | 9.407 | 27.00 | 3.76 | 3.04 | 3.04 | 0.43 | |
| SuperPoint | NN-Mutual | 0.74 | 11.093 | 1.548 | 2.9755 | 39.08 | 2.82 | 2.50 | 2.55 | 1.01 |
| NN-Ratio | 0.37 | 11.124 | 1.700 | 2.9755 | 23.60 | 2.78 | 3.20 | 2.55 | 0.88 | |
| NN-Distance | 0.60 | 11.147 | 1.653 | 3.006 | 33.42 | 2.77 | 2.64 | 2.55 | 0.93 | |
| SuperGlue | 1.08 | 11.108 | 84.371 | 2.9316 | 15.56 | 3.38 | 14.08 | 2.61 | 0.97 | |
| SuperGlue-Fast | 1.09 | 11.108 | 73.917 | 2.9469 | 19.35 | 3.48 | 10.38 | 2.61 | 0.98 | |
| LightGlue | 0.59 | 11.284 | 15.270 | 3.046 | 26.65 | 3.24 | 7.63 | 2.67 | 0.97 | |
| (b) Performance results on the Hilti dataset. | ||||||||||
| AKAZE | NN-BruteForce | 0.32 | 149.298 | 3.019 | 1.886 | 70.50 | 2.91 | 0.61 | 2.03 | 0.23 |
| SIFT | NN-BruteForce | 0.27 | 200.208 | 9.892 | 1.846 | 70.31 | 5.84 | 0.71 | 2.03 | 0.49 |
| ORB | NN-BruteForce | 1.07 | 28.630 | 151.729 | 1.849 | 64.75 | 3.16 | 0.23 | 2.26 | 0.61 |
| D2-Net | NN-Mutual | 1.19 | 59.296 | 1.948 | 1.762 | 36.67 | 3.77 | 1.04 | 2.52 | 2.90 |
| NN-Ratio | 0.16 | 60.089 | 2.025 | 1.777 | 12.19 | 2.88 | 7.46 | 2.47 | 2.62 | |
| NN-Distance | 0.66 | 60.272 | 1.968 | 1.791 | 27.54 | 2.86 | 1.88 | 2.45 | 2.73 | |
| DISK | LightGlue | 1.35 | 39.825 | 26.771 | 1.775 | 26.67 | 5.62 | 8.38 | 3.42 | 2.16 |
| NN-Mutual | 1.69 | 39.764 | 2.782 | 1.786 | 37.75 | 5.38 | 1.03 | 2.42 | 2.18 | |
| NN-Ratio | 0.47 | 39.764 | 2.819 | 1.752 | 29.46 | 3.51 | 3.71 | 2.44 | 1.93 | |
| NN-Distance | 0.69 | 39.764 | 2.796 | 1.754 | 32.38 | 3.67 | 2.53 | 2.68 | 1.96 | |
| R2D2 | NN-Mutual | 2.06 | 78.003 | 5.232 | 1.715 | 36.75 | 6.00 | 1.71 | 2.67 | 3.16 |
| NN-Ratio | 0.54 | 77.820 | 5.276 | 1.710 | 27.63 | 3.25 | 6.46 | 2.37 | 2.84 | |
| NN-Distance | 1.65 | 77.942 | 5.218 | 1.711 | 33.90 | 5.80 | 2.12 | 4.51 | 3.11 | |
| SOSNet | Adalam | 0.17 | 117.127 | 7.396 | 5.013 | 33.71 | 3.71 | 4.96 | 3.68 | 0.26 |
| NN-Mutual | 0.29 | 117.981 | 1.431 | 5.009 | 40.00 | 3.70 | 1.08 | 3.69 | 0.25 | |
| NN-Ratio | 0.12 | 120.361 | 1.640 | 5.039 | 17.48 | 3.71 | 2.80 | 3.67 | 0.21 | |
| NN-Distance | 0.13 | 118.225 | 1.552 | 5.028 | 15.38 | 3.67 | 2.32 | 3.69 | 0.21 | |
| SuperPoint | NN-Mutual | 0.47 | 10.445 | 1.408 | 1.745 | 34.85 | 2.78 | 0.91 | 1.90 | 0.49 |
| NN-Ratio | 0.08 | 10.475 | 1.636 | 1.744 | 4.94 | 2.77 | 5.19 | 1.93 | 0.42 | |
| NN-Distance | 0.19 | 10.513 | 1.550 | 1.755 | 16.50 | 2.79 | 2.34 | 1.96 | 0.45 | |
| SuperGlue | 1.05 | 10.483 | 69.039 | 1.747 | 11.17 | 2.78 | 6.27 | 2.73 | 0.47 | |
| SuperGlue-Fast | 0.93 | 10.506 | 62.231 | 1.733 | 11.44 | 2.78 | 5.23 | 2.40 | 0.47 | |
| LightGlue | 0.37 | 10.895 | 14.467 | 1.770 | 15.71 | 2.79 | 13.89 | 2.24 | 0.47 | |
| Extractor | Matcher | Elapsed Time (hr) | Mean Runtime Feature Extraction (ms) | Mean Runtime Feature Matching (ms) | Mean Runtime Global Search (ms) | CPU Usage (%) | RAM Usage (GB) | GPU Usage (%) | GPU Mem. Usage (GB) | Disk Usage (GB) |
|---|---|---|---|---|---|---|---|---|---|---|
| (a) Performance results on the private dataset. | ||||||||||
| AKAZE | NN-BruteForce | 0.47 | 930.335 | 64.256 | 3.326 | 56.23 | 6.55 | 0.35 | 2.59 | 0.30 |
| SIFT | NN-BruteForce | 0.68 | 857.155 | 720.354 | 3.264 | 58.46 | 16.27 | 0.24 | 2.59 | 1.24 |
| ORB | NN-BruteForce | 1.73 | 93.997 | 1491.121 | 3.204 | 55.71 | 5.02 | 0.11 | 2.84 | 0.94 |
| D2-Net | NN-Mutual | 1.20 | 122.009 | 5.906 | 2.979 | 32.33 | 5.30 | 3.11 | 2.82 | 3.55 |
| NN-Ratio | 0.29 | 120.789 | 5.933 | 3.065 | 16.65 | 3.20 | 7.26 | 2.82 | 3.25 | |
| NN-Distance | 0.53 | 122.376 | 5.936 | 3.021 | 17.98 | 4.48 | 4.75 | 2.82 | 3.37 | |
| DISK | LightGlue | 0.98 | 78.247 | 54.349 | 3.099 | 17.04 | 6.56 | 13.20 | 4.10 | 2.02 |
| NN-Mutual | 0.81 | 78.613 | 6.937 | 3.065 | 29.71 | 6.20 | 4.23 | 3.33 | 1.95 | |
| NN-Ratio | 0.48 | 78.308 | 7.045 | 2.966 | 19.40 | 5.67 | 5.94 | 3.32 | 1.78 | |
| NN-Distance | 0.69 | 78.308 | 7.002 | 2.853 | 29.15 | 5.77 | 4.74 | 3.32 | 1.79 | |
| R2D2 | NN-Mutual | 0.99 | 172.241 | 7.071 | 2.831 | 26.35 | 5.41 | 4.49 | 3.58 | 1.81 |
| NN-Ratio | 0.38 | 171.997 | 7.167 | 2.951 | 14.98 | 4.19 | 8.65 | 3.33 | 1.64 | |
| NN-Distance | 0.80 | 172.119 | 7.086 | 2.756 | 21.50 | 5.41 | 5.08 | 3.33 | 1.81 | |
| SOSNet | Adalam | 0.21 | 247.192 | 9.633 | 6.481 | 18.69 | 3.51 | 5.66 | 3.04 | 0.38 |
| NN-Mutual | 0.32 | 253.174 | 1.488 | 6.870 | 35.73 | 3.49 | 2.88 | 3.03 | 0.40 | |
| NN-Ratio | 0.18 | 250.000 | 1.652 | 6.203 | 18.04 | 3.53 | 3.61 | 3.03 | 0.34 | |
| NN-Distance | 0.23 | 247.559 | 1.593 | 6.535 | 19.00 | 3.53 | 3.24 | 3.03 | 0.34 | |
| SuperPoint | NN-Mutual | 0.33 | 11.414 | 1.480 | 3.037 | 32.21 | 2.80 | 2.56 | 2.57 | 0.46 |
| NN-Ratio | 0.15 | 11.360 | 1.673 | 2.901 | 11.98 | 2.77 | 3.57 | 2.57 | 0.40 | |
| NN-Distance | 0.18 | 11.421 | 1.597 | 3.086 | 14.35 | 2.78 | 3.32 | 2.57 | 0.42 | |
| SuperGlue | 0.48 | 11.360 | 44.896 | 2.922 | 19.08 | 2.78 | 10.90 | 2.63 | 0.46 | |
| SuperGlue-Fast | 0.32 | 11.368 | 37.836 | 2.968 | 11.46 | 2.80 | 12.00 | 2.63 | 0.46 | |
| LightGlue | 0.23 | 11.299 | 15.328 | 2.890 | 15.50 | 2.80 | 9.07 | 2.63 | 0.46 | |
| (b) Performance results on the Hilti dataset. | ||||||||||
| AKAZE | NN-BruteForce | 19.07 | 149.298 | 3.019 | 1.886 | 70.50 | 2.91 | 0.61 | 2.03 | 0.23 |
| SIFT | NN-BruteForce | 15.94 | 200.208 | 9.892 | 1.846 | 70.31 | 5.84 | 0.71 | 2.03 | 0.49 |
| ORB | NN-BruteForce | 25.18 | 28.630 | 151.729 | 1.849 | 64.75 | 3.16 | 0.23 | 2.26 | 0.60 |
| D2-Net | NN-Mutual | 20.63 | 60.272 | 1.968 | 1.791 | 27.54 | 2.86 | 1.88 | 2.45 | 2.73 |
| NN-Ratio | 5.59 | 60.089 | 2.025 | 1.777 | 12.19 | 2.88 | 7.46 | 2.47 | 2.62 | |
| NN-Distance | 20.29 | 59.296 | 1.948 | 1.762 | 36.67 | 3.77 | 1.04 | 2.52 | 2.89 | |
| DISK | LightGlue | 41.34 | 39.764 | 2.819 | 1.752 | 29.46 | 3.51 | 3.71 | 2.44 | 1.92 |
| NN-Mutual | 40.28 | 39.764 | 2.796 | 1.754 | 32.38 | 3.67 | 2.53 | 2.68 | 1.95 | |
| NN-Ratio | 26.61 | 39.764 | 2.782 | 1.786 | 37.75 | 5.38 | 1.03 | 2.42 | 2.15 | |
| NN-Distance | 32.09 | 39.825 | 26.771 | 1.775 | 26.67 | 5.62 | 8.38 | 3.42 | 2.15 | |
| R2D2 | NN-Mutual | 36.19 | 77.820 | 5.276 | 1.710 | 27.63 | 3.25 | 6.46 | 2.37 | 2.84 |
| NN-Ratio | 19.40 | 78.003 | 5.232 | 1.715 | 36.75 | 6.00 | 1.71 | 2.67 | 3.14 | |
| NN-Distance | 31.88 | 77.942 | 5.218 | 1.711 | 33.90 | 5.80 | 2.12 | 4.51 | 3.09 | |
| SOSNet | Adalam | 7.44 | 118.225 | 1.552 | 5.028 | 15.38 | 3.67 | 2.32 | 3.69 | 0.21 |
| NN-Mutual | 8.16 | 117.981 | 1.431 | 5.009 | 40.00 | 3.70 | 1.08 | 3.69 | 0.25 | |
| NN-Ratio | 6.46 | 120.361 | 1.640 | 5.039 | 17.48 | 3.71 | 2.80 | 3.67 | 0.21 | |
| NN-Distance | 5.97 | 117.127 | 7.396 | 5.013 | 33.71 | 3.71 | 4.96 | 3.68 | 0.26 | |
| SuperPoint | NN-Mutual | 7.78 | 10.475 | 1.636 | 1.744 | 4.94 | 2.77 | 5.19 | 1.93 | 0.42 |
| NN-Ratio | 5.13 | 10.895 | 14.467 | 1.770 | 15.71 | 2.79 | 13.89 | 2.24 | 0.47 | |
| NN-Distance | 7.61 | 10.513 | 1.550 | 1.755 | 16.50 | 2.79 | 2.34 | 1.96 | 0.45 | |
| SuperGlue | 8.91 | 10.445 | 1.408 | 1.745 | 34.85 | 2.78 | 0.91 | 1.90 | 0.49 | |
| SuperGlue-Fast | 9.57 | 10.506 | 62.231 | 1.733 | 11.44 | 2.78 | 5.23 | 2.40 | 0.47 | |
| LightGlue | 7.59 | 10.483 | 69.039 | 1.747 | 11.17 | 2.78 | 6.27 | 2.73 | 0.47 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cueto Zumaya, C.R.; Catalano, I.; Queralta, J.P. Building Better Models: Benchmarking Feature Extraction and Matching for Structure from Motion at Construction Sites. Remote Sens. 2024, 16, 2974. https://doi.org/10.3390/rs16162974
Cueto Zumaya CR, Catalano I, Queralta JP. Building Better Models: Benchmarking Feature Extraction and Matching for Structure from Motion at Construction Sites. Remote Sensing. 2024; 16(16):2974. https://doi.org/10.3390/rs16162974
Chicago/Turabian StyleCueto Zumaya, Carlos Roberto, Iacopo Catalano, and Jorge Peña Queralta. 2024. "Building Better Models: Benchmarking Feature Extraction and Matching for Structure from Motion at Construction Sites" Remote Sensing 16, no. 16: 2974. https://doi.org/10.3390/rs16162974
APA StyleCueto Zumaya, C. R., Catalano, I., & Queralta, J. P. (2024). Building Better Models: Benchmarking Feature Extraction and Matching for Structure from Motion at Construction Sites. Remote Sensing, 16(16), 2974. https://doi.org/10.3390/rs16162974