
Segment Anything Model-Based Building Footprint Extraction for Residential Complex Spatial Assessment Using LiDAR Data and Very High-Resolution Imagery

 , ,
, ,
Abstract
1. Introduction
- (1)
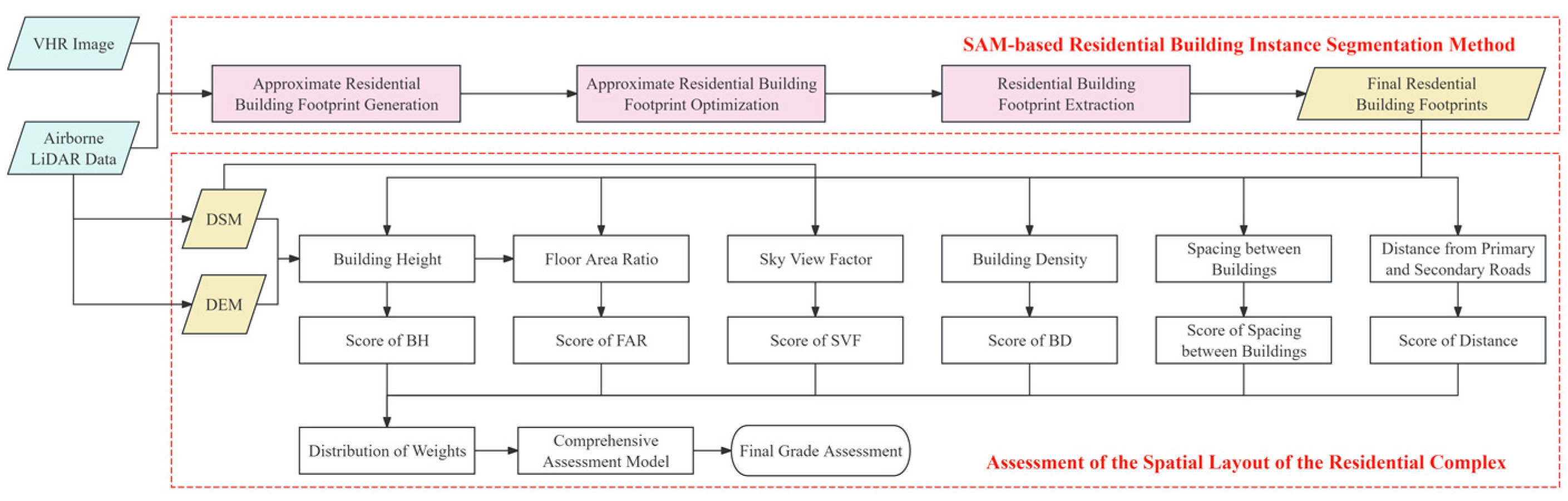
- According to the characteristics of LiDAR data and VHR remote sensing images, the automated prompt generator for the SAM-based residential building instance segmentation method is established.
- (2)
- Based on the residential building footprints extracted by the method, the comprehensive assessment model is constructed, which systematically evaluates the residential settings.
2. Study Area and Data
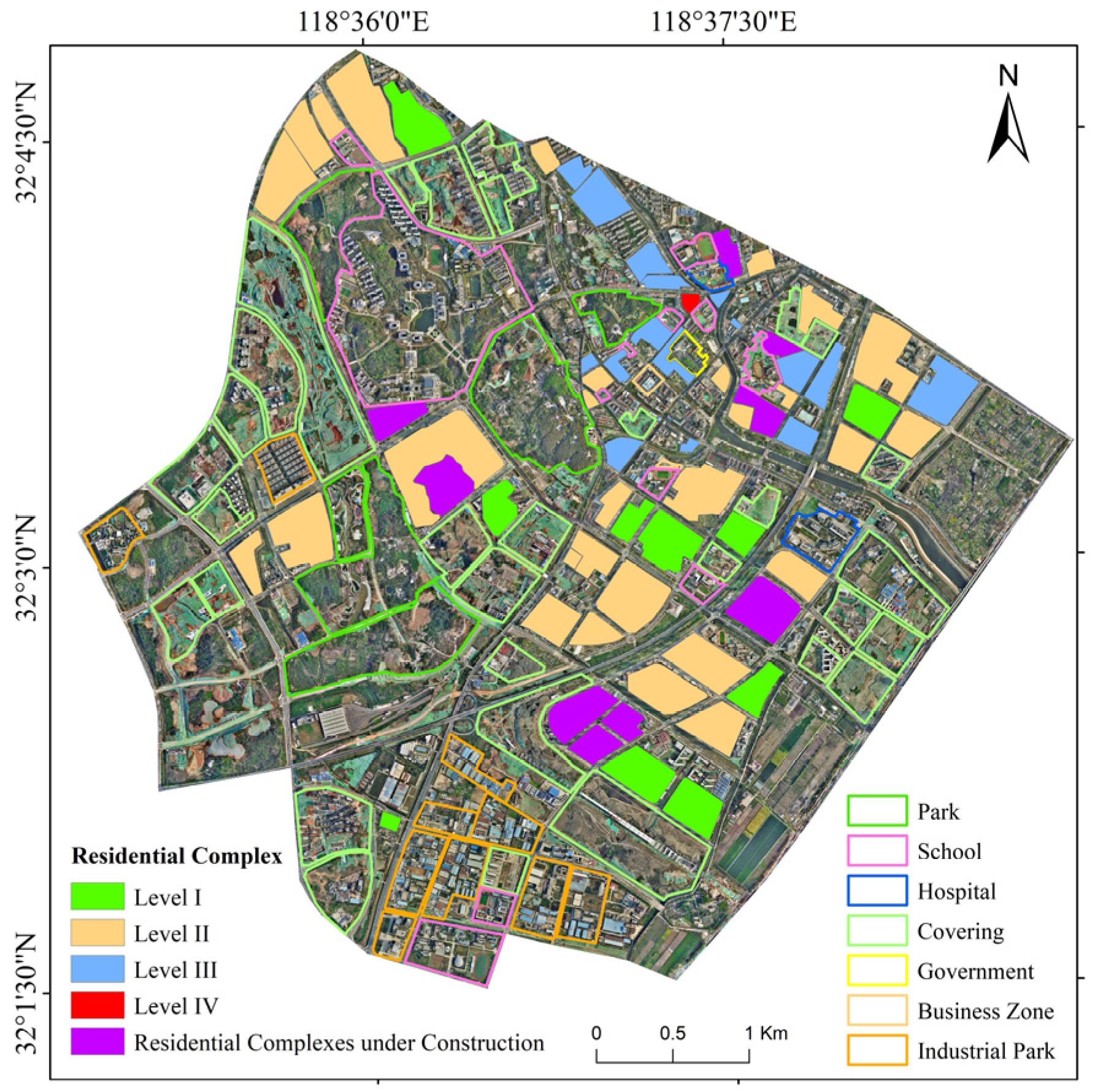
2.1. Study Area
2.2. Data
- LiDAR data: The LiDAR data were acquired in 2019 and collected using a Laser 3D Scanner equipped with Riegl 1560i laser systems. The attributes of the LiDAR data include X, Y, and Z coordinates and the intensity information. The range of reflection intensity values is from 0 to 65,535. And the density of point clouds is about 8.0 points/m2.
- VHR images: The very high-resolution orthophotos of the study area were multi-spectral images from 2019 with a spatial resolution of 0.15 m, including red, green, and blue bands.
- AOI data: The AOI data were obtained from the AMAP inside and each AOI with residential attributes was regarded as a basic unit for assessing the residential complex.
- Road networks: The road networks were obtained from the Open Street Map (OSM) website. The networks named “primary” and “secondary” roads were chosen to calculate the assessment indicators in the comprehensive assessment model.
3. Methodology
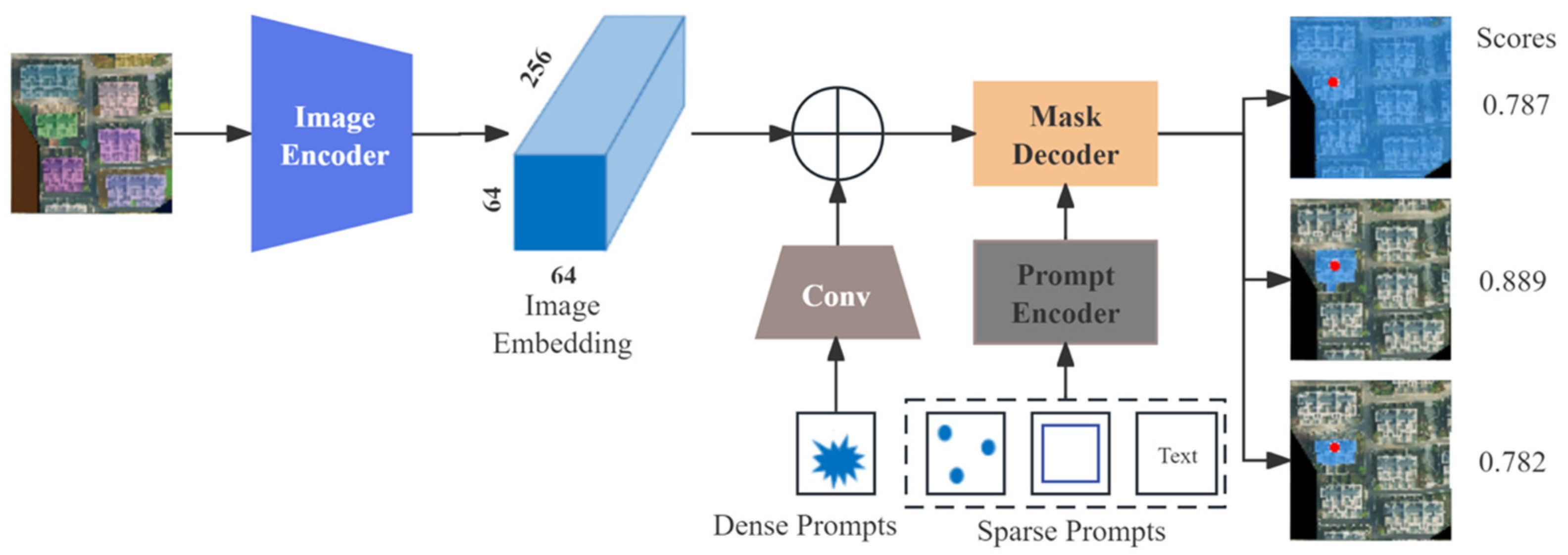
3.1. Brief Introduction to the SAM
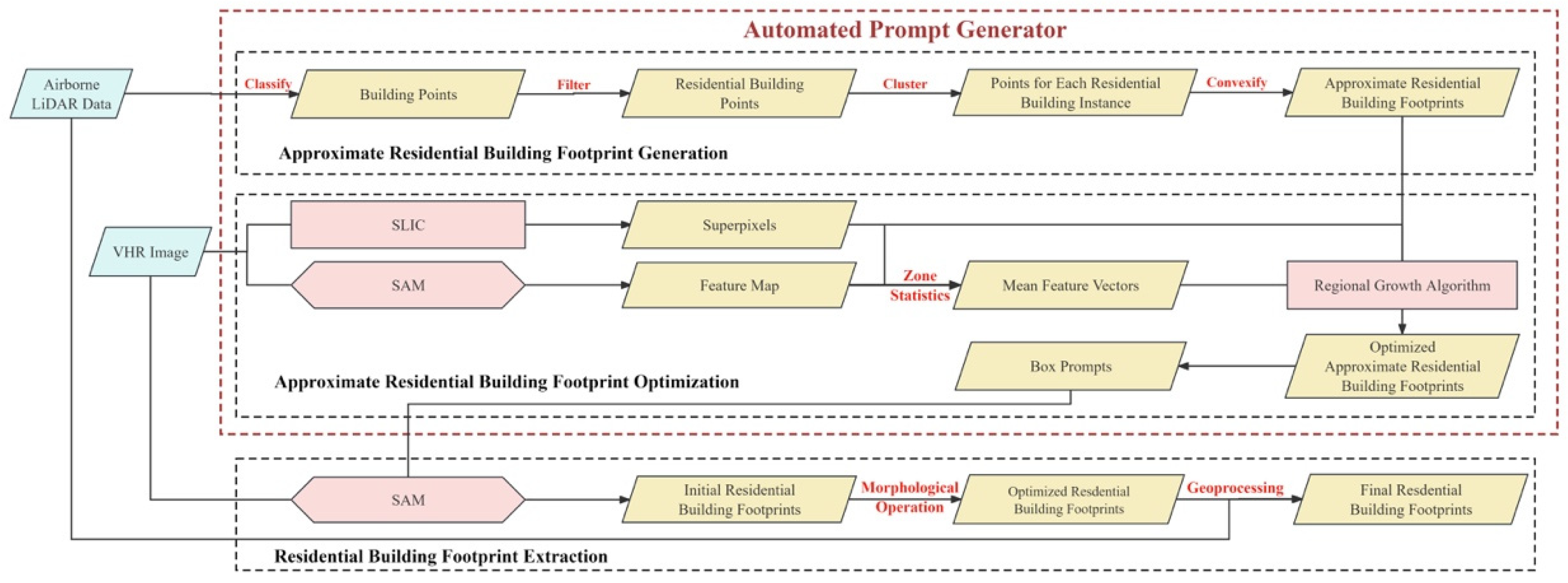
3.2. SAM-Based Residential Building Instance Segmentation Method
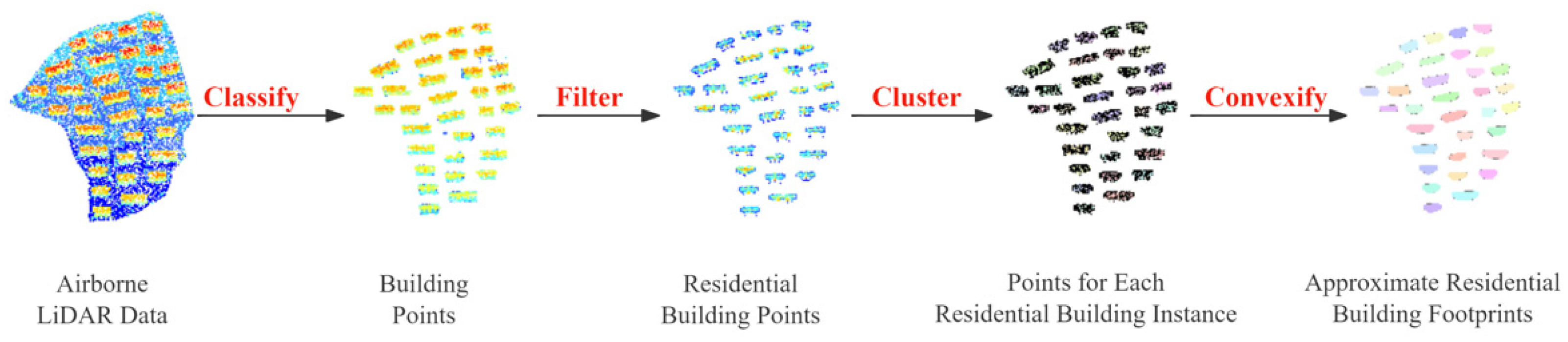
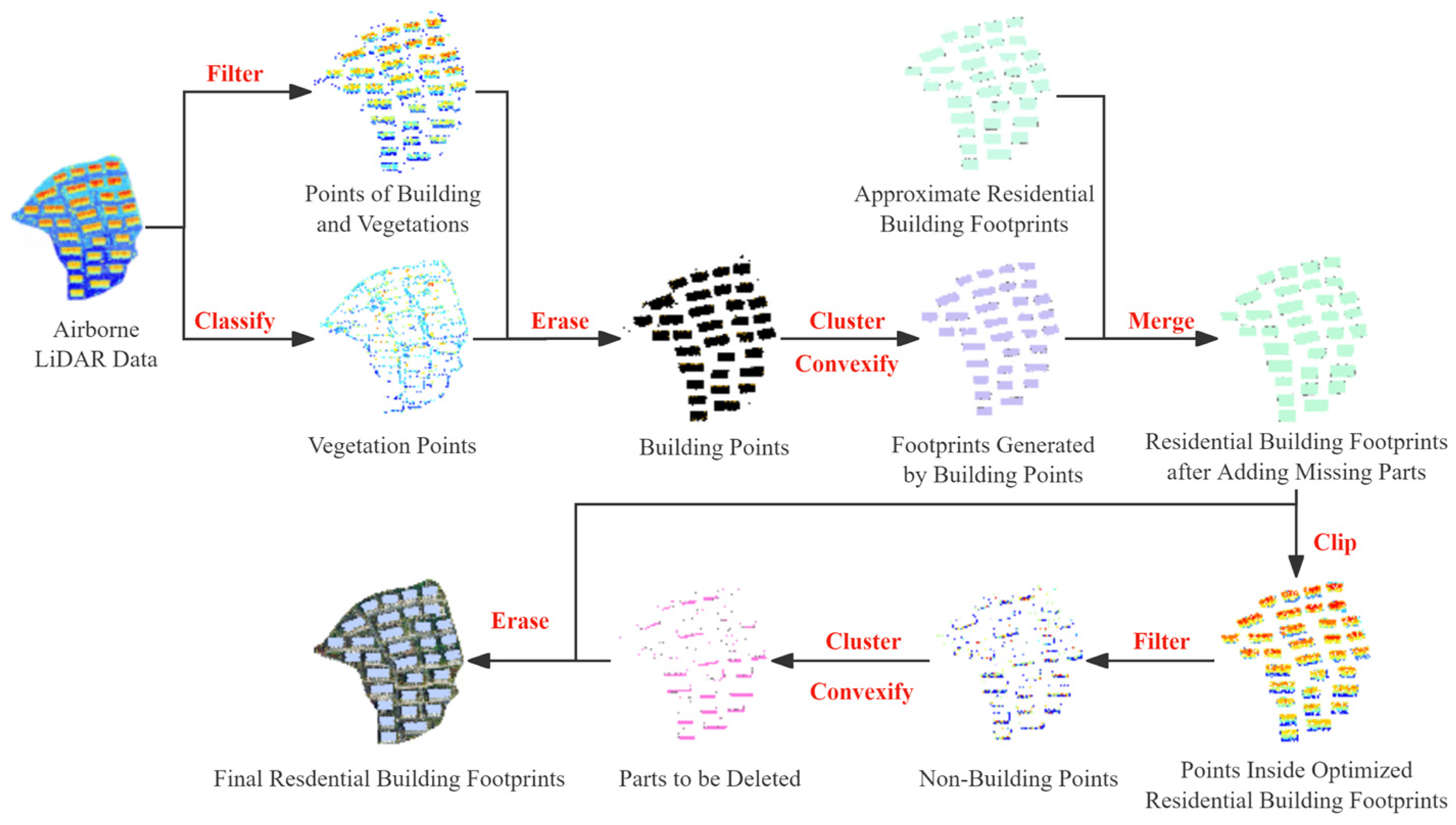
3.2.1. Approximate Footprint Detection Using LiDAR Data
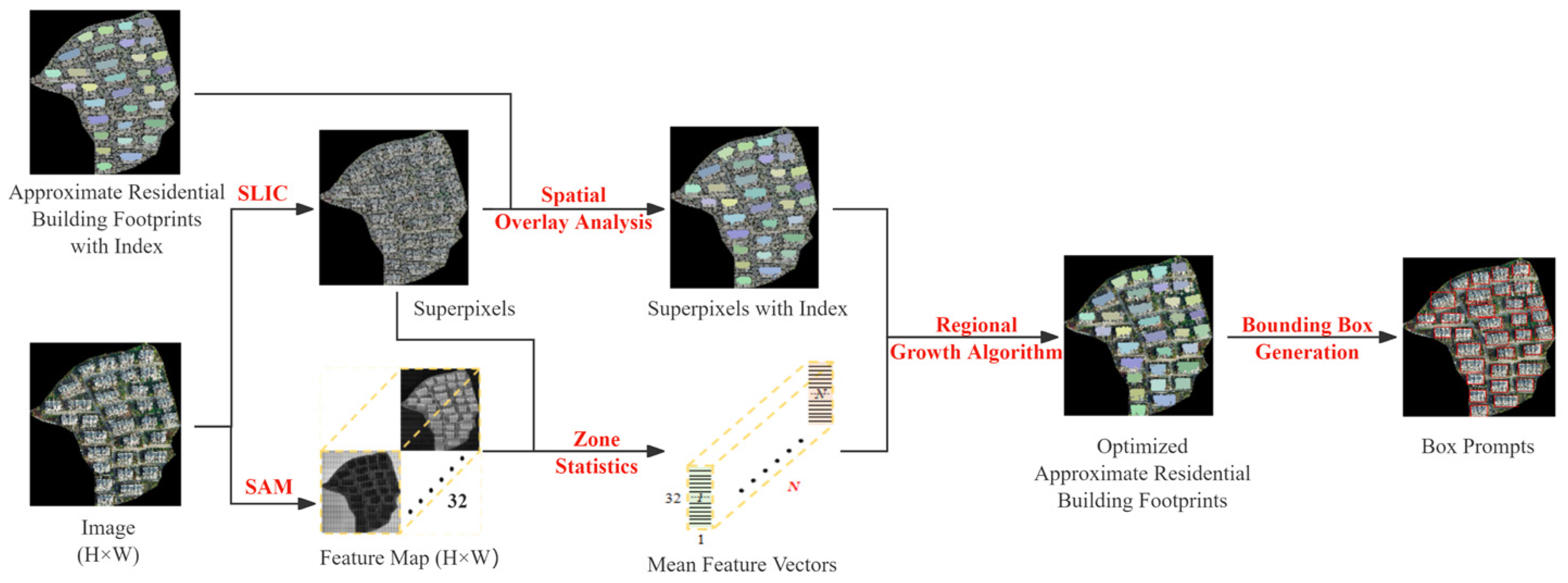
3.2.2. Automatic Prompt Generation for the SAM
3.2.3. Residential Building Footprint Extraction
3.3. Assessment of Residential Complexes
3.3.1. Selection and Calculation of Assessment Indicators
- Building Density (BD): The ratio of the total building footprint area to the land area within a residential complex. The calculation formula is shown in Equation (1):
- 2.
- Building Height (BH): The height of buildings within a complex directly impacts the internal landscape and visual comfort. The Digital Surface Model (DSM) includes height information of surface structures, bridges, and trees, while the Digital Elevation Model (DEM) represents the Earth’s surface topography without including building heights. The specific calculation formula of BH using DSM and DEM is shown in Equation (2):
- 3.
- Floor Area Ratio (FAR): This comprehensive indicator measures the quality of urban residential conditions and is a crucial technical parameter affecting developers’ economic interests. It reflects the comfort level of the residents. The FAR is calculated as the ratio of the total floor area of above-ground buildings to the land area. The total floor area is determined according to the “Calculation code for construction area of building” [57]. The number of floors of each building was calculated, and then the total floor area was obtained by combining the building footprint area. The specific calculation formulas are shown in Equations (3) and (4):
- 4.
- Spacing between buildings: This refers to the distance between the outer walls of two adjacent buildings within the same complex. This is one of the crucial factors for evaluating the residential complexes. Initially, the “Generate Near Table” tool in ArcMap10.2 spatial analysis tools was used to calculate the shortest distances between each building within the complex. Subsequently, the average of these distances was computed, using it as reference data to assess the score for building spacing in the residential complex.
- 5.
- Sky View Factor (SVF): The ratio of radiation received by a plane to the radiation emitted by the entire hemispheric environment. In simple terms, SVF reflects the proportion of sky visible to people in an urban area [58]. The SVF in this study was calculated using the SVF plugin in QGIS 3.16.3, with reference to https://github.com/UMEP-dev/UMEP-Docs/tree/master, accessed on 29 April 2024.
- 6.
- Distance from primary and secondary roads: The distance between residential complexes and primary or secondary roads to some extent reflects the convenience of transportation and daily life within the complexes. In this study, road network data around residential complexes were obtained from the Open Street Map official website. Primary and secondary roads were selected from this dataset. And then, the shortest distance from each building within the complex to the surrounding primary and secondary roads was calculated by using ArcMap10.2. The average of these distances was then used as reference data when assigning values to the assessment indicators.
3.3.2. Scoring Criteria for Assessment Indicators
- BD: Higher BD may lead to cramped internal spaces within a complex, affecting the comfort and quality of the residential environment. BD is negatively correlated with the spatial layout of residential complexes. This study refers to the maximum building density values for different residential building layouts in the “Standard for urban residential area planning and design” [59], categorizing building density according to the scoring criteria shown in Table 1.
- BH: Taller buildings may block the surrounding environment, leading to poorer lighting and ventilation conditions within the complex. They may also impact residents’ views and visual experiences. Building height is negatively correlated with the spatial environment. This study refers to the “Uniform standard for design of civil buildings” [60] regarding building height, categorizing building height according to the scoring criteria shown in Table 2.
- FAR: Higher FAR means constructing more buildings on limited land resources. Excessive FAR may lead to a sense of overcrowding within the complex, reducing the comfort and livability of the residential environment. Therefore, the FAR is also negatively correlated with spatial quality. The FAR is typically regulated by the government according to relevant provisions in the detailed control plans for various residential land uses under the current urban planning regulatory framework. Considering both domestic and international demand and the regulations of the “Standard for urban residential area planning and design” [59] for the FAR in residential complexes, as well as current trends and conditions, the scoring criteria for the FAR are defined as shown in Table 3.
- Spacing between buildings: This indicator directly affects ventilation, lighting, and landscape quality within a complex. Adequate spacing ensures clear spaces between buildings, providing good lighting and ventilation conditions, and allowing residents to enjoy the surrounding scenery. Spacing between buildings is positively correlated with the spatial layout of residential complexes. This study refers to the “Design code for residential buildings” [61] for building spacing guidelines. The grading criteria for building spacing are shown in Table 4.
- SVF: SVF is a dimensionless parameter, ranging from 0 to 1, with 0 indicating a completely obstructed sky and 1 indicating a completely open sky. SVF is positively correlated with spatial layout. Xu et al. [62] proposed an online method for rapidly estimating large-area SVF using SVI and obtained SVF for the Qinhuai District in Nanjing. The authors of [63] used LiDAR remote sensing to obtain high-resolution distributions of buildings and tree canopies at the urban scale and performed related SVF analysis, resulting in the SVF distribution for Incheon, South Korea. Based on research by domestic and international scholars, the grading criteria for SVF in this study are shown in Table 5.
- Distance from primary and secondary roads: This indicator evaluates the external spatial layout of residential complexes, considering transportation convenience. The closer a complex to primary and secondary roads, the more convenient travel becomes for residents. It is negatively correlated with spatial setting quality. The scoring criteria for this indicator are based on the complex life circle classification standards in the “Standard for urban residential area planning and design” [59], as shown in Table 6.
3.3.3. Calculation of Weights for Assessment Indicators
3.3.4. Comprehensive Assessment Model
4. Results
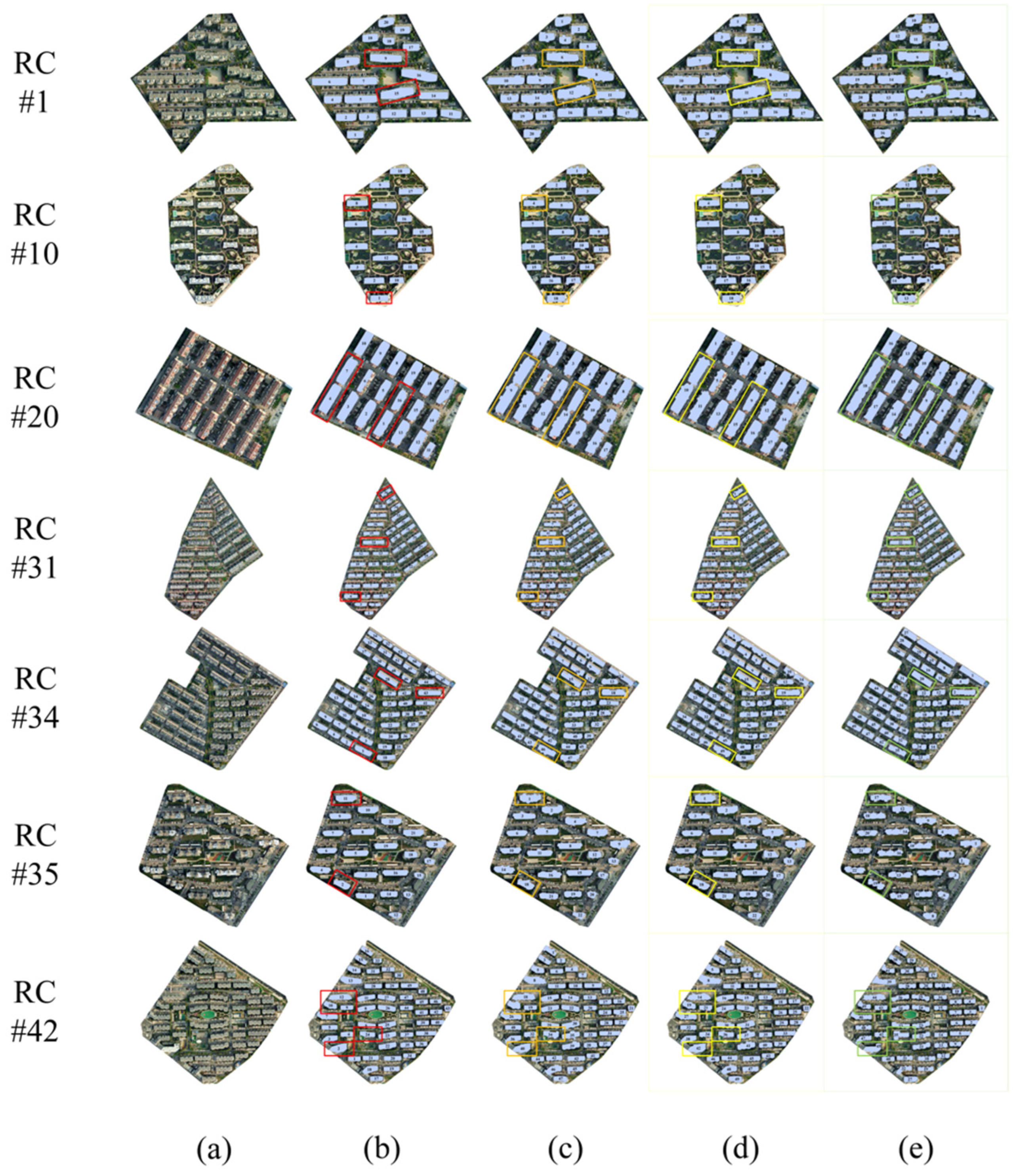
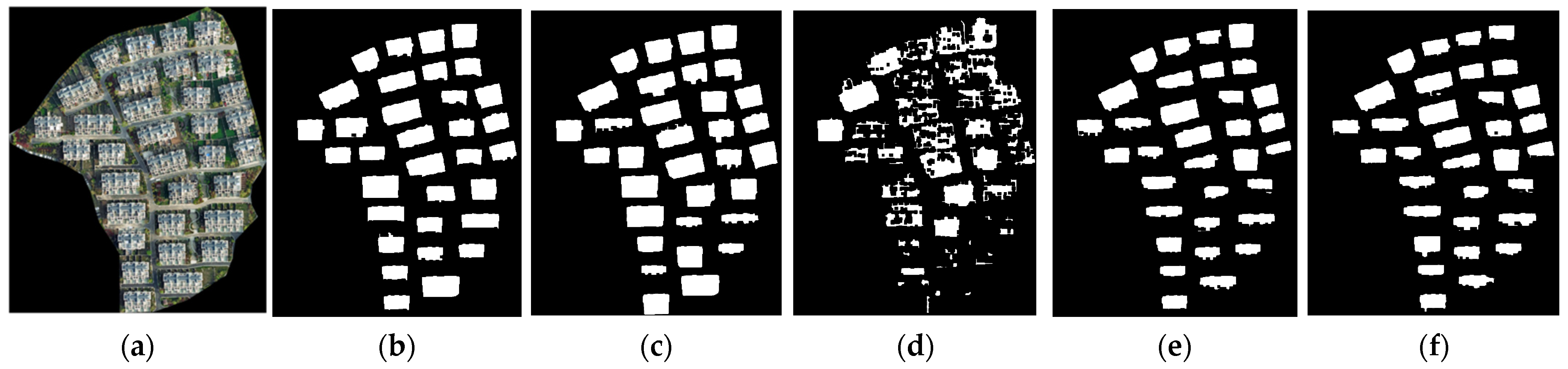
4.1. Results of Building Extraction
4.2. Results of the Assessment of the Residential Complexes
5. Discussion
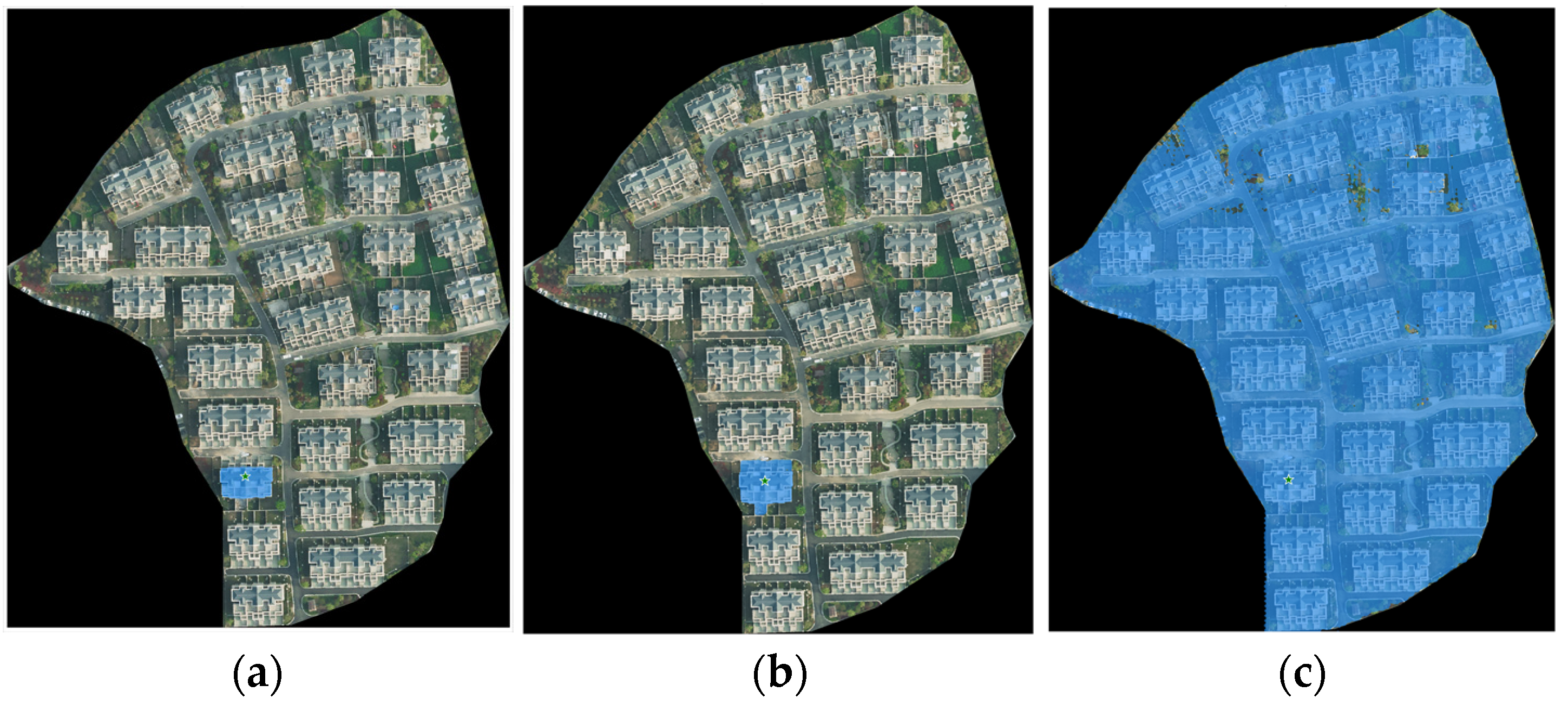
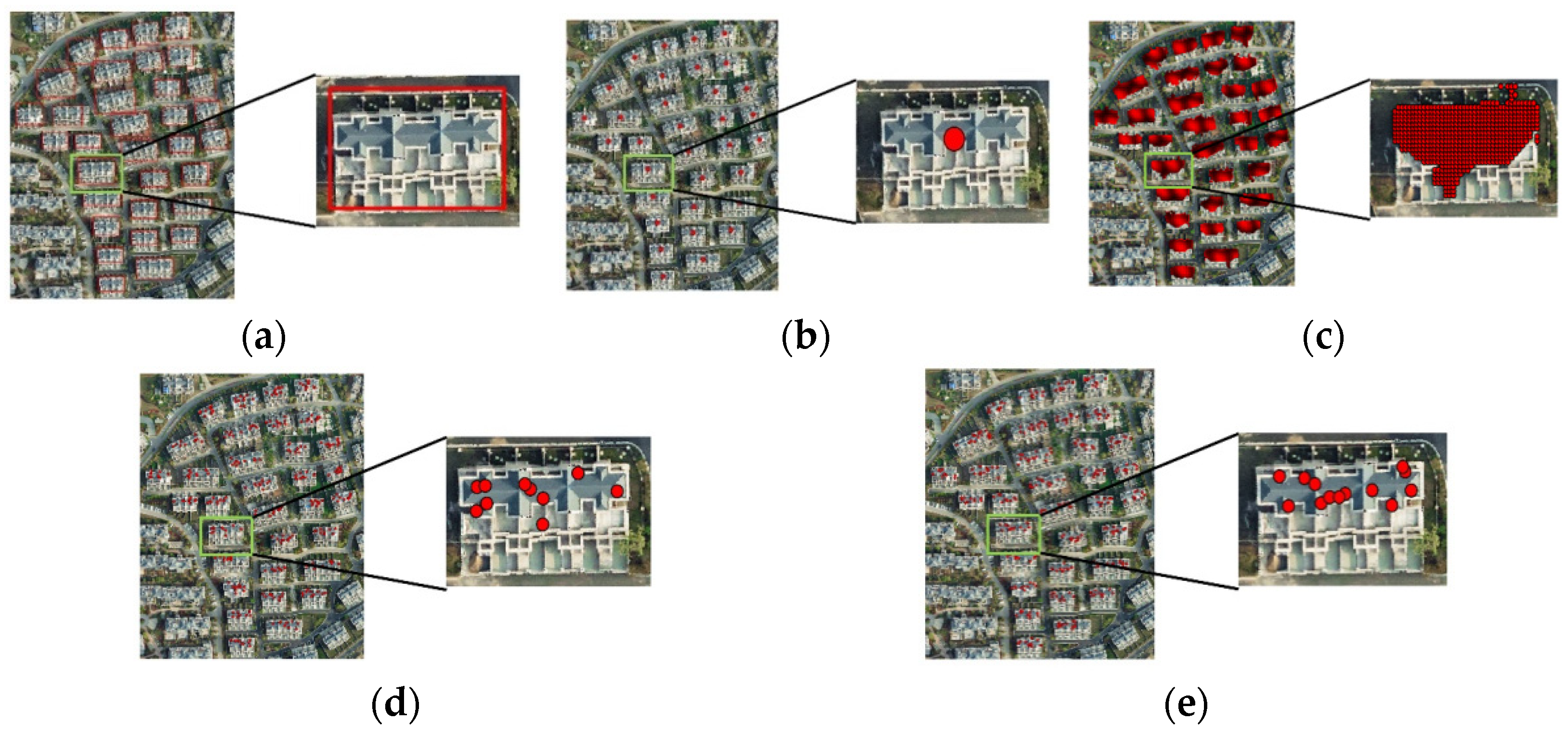
5.1. The Effect of Different Prompts for the SAM
- Bounding box: A bounding box is a simple rectangular frame that tightly encloses one or more objects in an image. In this study, based on clustered point cloud data, a bounding box was constructed for each class of point clouds as prompts, according to the X and Y coordinate values of each class of point clouds.
- Grid point sampling: A series of points is uniformly generated within each approximate vector surface of residential buildings as prompts in this study.
- Centroid: In this study, centroids are selected as prompts based on the approximate vector surfaces of residential buildings.
- Global Random Sampling: In this study, 10 points are randomly selected within each approximate vector surface of residential buildings, and the centroid within each vector surface is chosen as the prompt.
- Equidistant Random Sampling: In this study, points are uniformly and irregularly selected within the approximate vector surfaces of residential buildings as prompts.
5.2. Study Significance and Uncertainties
6. Conclusions
- (1)
- The SAM-based residential building instance segmentation method was used to effectively extract residential building footprints. Comparing the final results with the actual building footprints on the VHR remote sensing imagery, it was proven that the extracted residential building footprints were reliable. The method demonstrated the feasibility of combining LiDAR data and VHR imagery in the SAM for extracting residential building footprints.
- (2)
- The residential layout of the complexes was classified into four levels. Significant differences in quality were observed among these levels. The numbers of residential complexes classified as level I (Excellent), II (Good), III (Average), and IV (Poor) were 10, 29, 16, and 1, respectively. Residential complexes with better residential settings had evenly distributed buildings, reasonable spacing between buildings, and high levels of greenery and open spaces. In contrast, residential complexes with poorer residential conditions mostly consisted of multi-story buildings. Although the building heights were moderate, the buildings were crowded with narrow spacing, and the complexes lacked greenery and public spaces, resulting in a cramped and oppressive spatial layout.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Full Name | Meaning |
|---|---|---|
| LiDAR | Light Detection and Ranging | A technology that uses laser light to measure distances to the Earth’s surface or other objects. |
| VHR | Very High Resolution | Refers to satellite or aerial imagery with extremely fine spatial detail. |
| SAM | Segment Anything Model | A model or algorithm used for object segmentation tasks in images or data. |
| AOI | Area of Interest | A specific geographic area defined and used for analysis or processing in geographic information systems (GISs). |
| AMAP inside | AMAP inside | Refers to professional services provided by AutoNavi’s open platform. |
| OSM | Open Street Map | An open-source geographic information project that provides free map data and services. |
| MLP | Multi-Layer Perceptron | A type of artificial neural network commonly used for classification and regression tasks in machine learning. |
| DBSCAN | Density-Based Spatial Clustering of Applications with Noise | A clustering algorithm that identifies clusters based on density in spatial data that is capable of handling noise and outliers. |
| SLIC | Simple Linear Iterative Clustering | An algorithm used for image segmentation that partitions an image into cohesive regions or superpixels. |
| DSM | Digital Surface Model | A model representing the Earth’s surface, including natural and human-made objects such as buildings and trees. |
| DEM | Digital Elevation Model | A 3D representation of terrain elevation data, typically used in geographic and spatial analysis. |
| nDSM | normalized Digital Surface Model | A Digital Surface Model adjusted to normalize elevations relative to a Digital Elevation Model (DEM), is often used for specific analysis purposes. |
| BD | Building Density | The ratio of the area of buildings within a specific area of land. |
| BH | Building Height | The vertical distance from the ground level to the highest point of a building. |
| FAR | Floor Area Ratio | The ratio of the total floor area of above-ground buildings to the land area. |
| SVF | Sky View Factor | The ratio of the visible area of the sky as seen from a specific point on the ground. |
References
- Zhang, Y.; Wang, R.; Wu, Y.; Chu, G.; Wu, X. The Influence of Built-Environment Factors on Connectivity of Road Networks in Residential Areas: A Study Based on 204 Samples in Nanjing, China. Buildings 2023, 13, 301. [Google Scholar] [CrossRef]
- dos Santos, R.C.; Galo, M.; Carrilho, A.C.; Pessoa, G.G.; de Oliveira, R.A.R. Automatic Building Change Detection Using Multi-Temporal Airborne Lidar Data. In Proceedings of the 2020 IEEE Latin American GRSS & ISPRS Remote Sensing Conference (LAGIRS), Santiago, Chile, 22–26 March 2020; pp. 54–59. [Google Scholar]
- Shao, Z.; Cheng, T.; Fu, H.; Li, D.; Huang, X. Emerging Issues in Mapping Urban Impervious Surfaces Using High-Resolution Remote Sensing Images. Remote Sens. 2023, 15, 2562. [Google Scholar] [CrossRef]
- Wellmann, T.; Lausch, A.; Andersson, E.; Knapp, S.; Cortinovis, C.; Jache, J.; Scheuer, S.; Kremer, P.; Mascarenhas, A.; Kraemer, R.; et al. Remote Sensing in Urban Planning: Contributions towards Ecologically Sound Policies? Landsc. Urban Plan. 2020, 204, 103921. [Google Scholar] [CrossRef]
- Al-Najjar, H.A.H.; Kalantar, B.; Pradhan, B.; Saeidi, V.; Halin, A.A.; Ueda, N.; Mansor, S. Land Cover Classification from Fused DSM and UAV Images Using Convolutional Neural Networks. Remote Sens. 2019, 11, 1461. [Google Scholar] [CrossRef]
- Malbhage, P.; Khoje, S. Building and Tree Detection by Fusing LiDar and Aerial Images for Urban Development Planning. In Proceedings of the 2017 Ninth International Conference on Advanced Computing (ICoAC), Chennai, India, 14–16 December 2017; pp. 1–8. [Google Scholar]
- Zhao, Z.; Zheng, X.; Fan, H.; Sun, M. Urban Spatial Structure Analysis: Quantitative Identification of Urban Social Functions Using Building Footprints. Front. Earth Sci. 2021, 15, 507–525. [Google Scholar] [CrossRef]
- Yan, J.; Zlatanova, S.; Aleksandrov, M.; Diakite, A.A.; Pettit, C. Integration of 3D objects and terrain for 3D modelling supporting the digital twin. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-4-W8, 147–154. [Google Scholar] [CrossRef]
- Deng, Y.; Xing, C.; Cai, L. Building Image Feature Extraction Using Data Mining Technology. Comput. Intell. Neurosci. 2022, 2022, e8006437. [Google Scholar] [CrossRef] [PubMed]
- Sun, X.; Wang, B.; Wang, Z.; Li, H.; Li, H.; Fu, K. Research Progress on Few-Shot Learning for Remote Sensing Image Interpretation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2387–2402. [Google Scholar] [CrossRef]
- Bai, Y.; Zhao, Y.; Shao, Y.; Zhang, X.; Yuan, X. Deep Learning in Different Remote Sensing Image Categories and Applications: Status and Prospects. Int. J. Remote Sens. 2022, 43, 1800–1847. [Google Scholar] [CrossRef]
- Dixit, M.; Chaurasia, K.; Kumar Mishra, V. Dilated-ResUnet: A Novel Deep Learning Architecture for Building Extraction from Medium Resolution Multi-Spectral Satellite Imagery. Expert Syst. Appl. 2021, 184, 115530. [Google Scholar] [CrossRef]
- Wang, Z. A Theoretical Review of Vegetation Extraction Methods Based on UAV. IOP Conf. Ser. Earth Environ. Sci. 2020, 546, 032019. [Google Scholar] [CrossRef]
- Gao, H.; Xiong, X.; Cao, L.; Yu, D.; Yang, G.; Yang, L. Pixel-Level Prediction for Ocean Remote Sensing Image Features Fusion Based on Global and Local Semantic Relations. IEEE Access 2021, 9, 11644–11654. [Google Scholar] [CrossRef]
- Ghandour, A.J.; Jezzini, A.A. Autonomous Building Detection Using Edge Properties and Image Color Invariants. Buildings 2018, 8, 65. [Google Scholar] [CrossRef]
- Zhang, W.; Yu, M.; Chen, X.; Zhou, F.; Ren, J.; Xu, H.; Xu, S. Combining Deep Fully Convolutional Network and Graph Convolutional Neural Network for the Extraction of Buildings from Aerial Images. Buildings 2022, 12, 2233. [Google Scholar] [CrossRef]
- Shen, Q.; Huang, J.; Wang, M.; Tao, S.; Yang, R.; Zhang, X. Semantic Feature-Constrained Multitask Siamese Network for Building Change Detection in High-Spatial-Resolution Remote Sensing Imagery. ISPRS J. Photogramm. Remote Sens. 2022, 189, 78–94. [Google Scholar] [CrossRef]
- Wei, S.; Zhang, T.; Yu, D.; Ji, S.; Zhang, Y.; Gong, J. From Lines to Polygons: Polygonal Building Contour Extraction from High-Resolution Remote Sensing Imagery. ISPRS J. Photogramm. Remote Sens. 2024, 209, 213–232. [Google Scholar] [CrossRef]
- Fuentes Reyes, M.; Xie, Y.; Yuan, X.; d’Angelo, P.; Kurz, F.; Cerra, D.; Tian, J. A 2D/3D Multimodal Data Simulation Approach with Applications on Urban Semantic Segmentation, Building Extraction and Change Detection. ISPRS J. Photogramm. Remote Sens. 2023, 205, 74–97. [Google Scholar] [CrossRef]
- Zhou, Z.; Gong, J.; Hu, X. Community-Scale Multi-Level Post-Hurricane Damage Assessment of Residential Buildings Using Multi-Temporal Airborne LiDAR Data. Autom. Constr. 2019, 98, 30–45. [Google Scholar] [CrossRef]
- Zhou, Z.; Gong, J. Automated Residential Building Detection from Airborne LiDAR Data with Deep Neural Networks. Adv. Eng. Inform. 2018, 36, 229–241. [Google Scholar] [CrossRef]
- Su, S.; Nakano, K.; Wakabayashi, K. Building detection from aerial lidar point cloud using deep learning. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, XLIII-B2-2022, 291–296. [Google Scholar] [CrossRef]
- Hui, Z.; Li, Z.; Cheng, P.; Ziggah, Y.Y.; Fan, J. Building Extraction from Airborne LiDAR Data Based on Multi-Constraints Graph Segmentation. Remote Sens. 2021, 13, 3766. [Google Scholar] [CrossRef]
- Ma, X.; Zheng, G.; Chi, X.; Yang, L.; Geng, Q.; Li, J.; Qiao, Y. Mapping Fine-Scale Building Heights in Urban Agglomeration with Spaceborne Lidar. Remote Sens. Environ. 2023, 285, 113392. [Google Scholar] [CrossRef]
- Ramiya, A.M.; Nidamanuri, R.R.; Krishnan, R. Segmentation Based Building Detection Approach from LiDAR Point Cloud. Egypt. J. Remote Sens. Space Sci. 2017, 20, 71–77. [Google Scholar] [CrossRef]
- Ullo, S.L.; Zarro, C.; Wojtowicz, K.; Meoli, G.; Focareta, M. LiDAR-Based System and Optical VHR Data for Building Detection and Mapping. Sensors 2020, 20, 1285. [Google Scholar] [CrossRef] [PubMed]
- Dong, Y.; Zhang, L.; Cui, X.; Ai, H.; Xu, B. Extraction of Buildings from Multiple-View Aerial Images Using a Feature-Level-Fusion Strategy. Remote Sens. 2018, 10, 1947. [Google Scholar] [CrossRef]
- Ghasemian, N.; Wang, J.; Reza Najafi, M. Building Detection Using a Dense Attention Network from LiDAR and Image Data. Geomatica 2021, 75, 209–236. [Google Scholar] [CrossRef]
- Zhang, P.; Du, P.; Lin, C.; Wang, X.; Li, E.; Xue, Z.; Bai, X. A Hybrid Attention-Aware Fusion Network (HAFNet) for Building Extraction from High-Resolution Imagery and LiDAR Data. Remote Sens. 2020, 12, 3764. [Google Scholar] [CrossRef]
- Li, Y.; Wu, H.; An, R.; Xu, H.; He, Q.; Xu, J. An Improved Building Boundary Extraction Algorithm Based on Fusion of Optical Imagery and LIDAR Data. Optik 2013, 124, 5357–5362. [Google Scholar] [CrossRef]
- Zhang, K.; Han, Y.; Chen, J.; Zhang, Z.; Wang, S. Semantic Segmentation for Remote Sensing Based on RGB Images and Lidar Data Using Model-Agnostic Meta-Learning and Partical Swarm Optimization. IFAC-PapersOnline 2020, 53, 397–402. [Google Scholar] [CrossRef]
- Nahhas, F.H.; Shafri, H.Z.M.; Sameen, M.I.; Pradhan, B.; Mansor, S. Deep Learning Approach for Building Detection Using LiDAR–Orthophoto Fusion. J. Sens. 2018, 2018, e7212307. [Google Scholar] [CrossRef]
- Zhou, K.; Gorte, B.; Lindenbergh, R.; Widyaningrum, E. 3D building change detection between current VHR images and past lidar data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII–2, 1229–1235. [Google Scholar] [CrossRef]
- Kirillov, A.; Mintun, E.; Ravi, N.; Mao, H.; Rolland, C.; Gustafson, L.; Xiao, T.; Whitehead, S.; Berg, A.C.; Lo, W.-Y.; et al. Segment Anything. In Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision (ICCV), Paris, France, 1–6 October 2023; pp. 3992–4003. [Google Scholar]
- Ding, L.; Zhu, K.; Peng, D.; Tang, H.; Yang, K.; Bruzzone, L. Adapting Segment Anything Model for Change Detection in VHR Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–11. [Google Scholar] [CrossRef]
- Chen, T.; Zhu, L.; Ding, C.; Cao, R.; Wang, Y.; Zhang, S.; Li, Z.; Sun, L.; Zang, Y.; Mao, P. SAM-Adapter: Adapting Segment Anything in Underperformed Scenes. In Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Paris, France, 2–6 October 2023; pp. 3359–3367. [Google Scholar]
- Zhang, J.; Ma, K.; Kapse, S.; Saltz, J.; Vakalopoulou, M.; Prasanna, P.; Samaras, D. SAM-Path: A Segment Anything Model for Semantic Segmentation in Digital Pathology. In Proceedings of the Medical Image Computing and Computer Assisted Intervention—MICCAI 2023 Workshops, Vancouver, BC, Canada, 8–12 October 2023; Celebi, M.E., Salekin, M.S., Kim, H., Albarqouni, S., Barata, C., Halpern, A., Tschandl, P., Combalia, M., Liu, Y., Zamzmi, G., et al., Eds.; Springer Nature Switzerland: Cham, Switzerland, 2023; pp. 161–170. [Google Scholar]
- Li, Y.; Wang, D.; Yuan, C.; Li, H.; Hu, J. Enhancing Agricultural Image Segmentation with an Agricultural Segment Anything Model Adapter. Sensors 2023, 23, 7884. [Google Scholar] [CrossRef]
- Wang, L.; Wei, Y.; Omrani, H.; Pijanowski, B.; Doucette, J.; Li, K.; Wu, Y. Analysis on Residential Density Dynamics in USA-a Case Study in Southeast Wisconsin. Sustain. Cities Soc. 2020, 52, 101866. [Google Scholar] [CrossRef]
- Bao, X.; Zhang, T.; Dewancker, B.J.; He, J.; Liu, S. Exploring the Unit Spatial Layout Preference for Urban Multi-Unit Residential Buildings: A Survey in Beijing, China. Sustainability 2023, 15, 12013. [Google Scholar] [CrossRef]
- Zhu, L.; Guo, Y.; Zhang, C.; Meng, J.; Ju, L.; Zhang, Y.; Tang, W. Assessing Community-Level Livability Using Combined Remote Sensing and Internet-Based Big Geospatial Data. Remote Sens. 2020, 12, 4026. [Google Scholar] [CrossRef]
- Liu, S.; Jia, L.; Zhang, F.; Wang, R.; Liu, X.; Zou, L.; Tang, X. Do New Urbanization Policies Promote Sustainable Urbanization? Evidence from China’s Urban Agglomerations. Land 2024, 13, 412. [Google Scholar] [CrossRef]
- Liu, X.; Shi, W.; Zhang, S. Progress of Research on Urban Growth Boundary and Its Implications in Chinese Studies Based on Bibliometric Analysis. Int. J. Environ. Res. Public Health 2022, 19, 16644. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.-H.; Yuan, Q.; Cai, H. Unravelling Urban Governance Challenges: Objective Assessment and Expert Insights on Livability in Longgang District, Shenzhen. Ecol. Indic. 2023, 155, 110989. [Google Scholar] [CrossRef]
- Huang, X.; Liu, Y. Livability Assessment of 101,630 Communities in China’s Major Cities: A Remote Sensing Perspective. Sci. China Earth Sci. 2022, 65, 1073–1087. [Google Scholar] [CrossRef]
- Onnom, W.; Tripathi, N.; Nitivattananon, V.; Ninsawat, S. Development of a Liveable City Index (LCI) Using Multi Criteria Geospatial Modelling for Medium Class Cities in Developing Countries. Sustainability 2018, 10, 520. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.-P.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. KDD 1996, 96, 226–231. [Google Scholar]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC Superpixels Compared to State-of-the-Art Superpixel Methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef]
- Guellab, S.; Benkhelifa, I. Enhancing Parking Online Reservation with a Recommendation System Based on User Preferences: A Hybrid Approach. In Proceedings of the 2023 20th ACS/IEEE International Conference on Computer Systems and Applications (AICCSA), Giza, Egypt, 4–7 December 2023; pp. 1–6. [Google Scholar]
- Lapidus, A.; Topchiy, D.; Kuzmina, T.; Shesterikova, Y.; Bidov, T. An Integrated Quality Index of High-Rise Residential Buildings for All Lifecycle Stages of a Construction Facility. Appl. Sci. 2023, 13, 2014. [Google Scholar] [CrossRef]
- Chan, I.Y.S.; Liu, A.M.M. Effects of Neighborhood Building Density, Height, Greenspace, and Cleanliness on Indoor Environment and Health of Building Occupants. Build. Environ. 2018, 145, 213–222. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Z.; Zhou, W.; Yan, J.; Qian, Y.; Wang, J.; Li, W. The Higher, the Cooler? Effects of Building Height on Land Surface Temperatures in Residential Areas of Beijing. Phys. Chem. Earth Parts A/B/C 2019, 110, 149–156. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, Q.; Yu, H.; Yan, T. Quality Assessment for Human Settlement of Urban Community Based on Remote Sensing Technology. In Proceedings of the 2011 IEEE International Conference on Spatial Data Mining and Geographical Knowledge Services, Fuzhou, China, 29 June–1 July 2011; pp. 417–420. [Google Scholar]
- Chen, Q.; Liu, R.; Cheng, Q.; Chen, Y.; Cao, S.; Du, M.; Li, K. Evaluating the Impact of Sky View Factor and Building Shadow Ratio on Air Temperature in Different Residential and Commercial Building Scenarios: A Case Study of Beijing, China. Urban Clim. 2023, 49, 101509. [Google Scholar] [CrossRef]
- Kim, J.; Lee, D.-K.; Brown, R.D.; Kim, S.; Kim, J.-H.; Sung, S. The Effect of Extremely Low Sky View Factor on Land Surface Temperatures in Urban Residential Areas. Sustain. Cities Soc. 2022, 80, 103799. [Google Scholar] [CrossRef]
- Duan, Y.; Lei, K.; Tong, H.; Li, B.; Wang, W.; Hou, Q. Land Use Characteristics of Xi’an Residential Blocks Based on Pedestrian Traffic System. Alex. Eng. J. 2021, 60, 15–24. [Google Scholar] [CrossRef]
- GB/T50353-2013; Calculation Code for Construction Area of Building. China Planning Press: Beijing, China, 2013.
- Oduncu, E.; Yüksel, S.E. Analyzing the Correlation of Sky-View Factor and Shadow Regions in Hyperspectral Data. In Proceedings of the 2016 24th Signal Processing and Communication Application Conference (SIU), Zonguldak, Turkey, 16–19 May 2016; pp. 1989–1992. [Google Scholar]
- GB50180-2018; Standard for Urban Residential Area Planning and Design. China Architecture and Building Press: Beijing, China, 2018.
- GB50352_2019; Uniform Standard for Design of Civil Buildings. China Architecture and Building Press: Beijing, China, 2019.
- GB 50096—1999; Design Code for Residential Buildings. China Architecture and Building Press: Beijing, China, 2003.
- Xu, H.; Lu, H.; Liu, S. Online Street View-Based Approach for Sky View Factor Estimation: A Case Study of Nanjing, China. Appl. Sci. 2024, 14, 2133. [Google Scholar] [CrossRef]
- An, S.M. A Study on Urban-Scale Building, Tree Canopy Footprint Identification and Sky View Factor Analysis with Airborne LiDAR Remote Sensing Data. Remote Sens. 2023, 15, 3910. [Google Scholar] [CrossRef]
- Reis, I.F.C.; Ferreira, F.A.F.; Meidutė-Kavaliauskienė, I.; Govindan, K.; Fang, W.; Falcão, P.F. An Evaluation Thermometer for Assessing City Sustainability and Livability. Sustain. Cities Soc. 2019, 47, 101449. [Google Scholar] [CrossRef]
- Saeed, U.; Ahmad, S.R.; Mohey-ud-din, G.; Butt, H.J.; Ashraf, U. An Integrated Approach for Developing an Urban Livability Composite Index—A Cities’ Ranking Road Map to Achieve Urban Sustainability. Sustainability 2022, 14, 8755. [Google Scholar] [CrossRef]
- Valcárcel-Aguiar, B.; Murias, P.; Rodríguez-González, D. Sustainable Urban Liveability: A Practical Proposal Based on a Composite Indicator. Sustainability 2019, 11, 86. [Google Scholar] [CrossRef]
- Mela, A.; Vryzidis, I.; Varelidis, G.; Tsotsolas, N. Urban Space Quality Evaluation Using Multi-Criteria Decision Analysis-Based Framework. In Multicriteria Decision Aid and Resource Management: Recent Research, Methods and Applications; Spyridakos, A., Ed.; Springer International Publishing: Cham, Switzerland, 2023; pp. 59–84. ISBN 978-3-031-34892-1. [Google Scholar]
- Le, L.H.; Ta, A.D.; Dang, H.Q. Building up a System of Indicators to Measure Social Housing Quality in Vietnam. Procedia Eng. 2016, 142, 116–123. [Google Scholar] [CrossRef]
- Zhu, C.; Jin, S.; Zhang, J.; Zhang, H. Construction of Residential Quality Assessment System Using Factor Analysis Method Based on Residents’ Satisfaction Survey: Case Study of Beijing, China. J. Asian Archit. Build. Eng. 2023, 22, 3253–3270. [Google Scholar] [CrossRef]


| BD (%) | Score |
|---|---|
| <20 | 90–100 |
| 20–40 | 75–90 |
| 40–50 | 60–75 |
| >50 | 0–60 |
| BH (m) | Score |
|---|---|
| <9 | 90–100 |
| 9–27 | 75–90 |
| 27–100 | 60–75 |
| >100 | 0–60 |
| FAR | Score |
|---|---|
| <1.8 | 90–100 |
| 1.8–3 | 75–90 |
| 3–4 | 60–75 |
| >4 | 0–60 |
| Spacing between Buildings (m) | Score |
|---|---|
| >13 | 90–100 |
| 9–13 | 75–90 |
| 6–9 | 60–75 |
| <6 | 0–60 |
| SVF (m) | Score |
|---|---|
| 0.8–1 | 90–100 |
| 0.6–0.8 | 75–90 |
| 0.2–0.6 | 60–75 |
| 0–0.2 | 0–60 |
| Distance from Primary and Secondary Roads (m) | Score |
|---|---|
| <300 | 90–100 |
| 300–500 | 75–90 |
| 500–800 | 60–75 |
| >800 | 0–60 |
| Evaluation Indicators | Weights |
|---|---|
| BD | 0.163 |
| BH | 0.079 |
| FAR | 0.244 |
| Spacing between buildings | 0.431 |
| SVF | 0.051 |
| Distance from primary and secondary roads | 0.032 |
| Level | W | Spatial Assessment of Residential |
|---|---|---|
| Ⅰ | >85 | Excellent |
| Ⅱ | 75–85 | Good |
| Ⅲ | 60–75 | Average |
| Ⅳ | <60 | Poor |
| RC | BD | BH | FAR | SVF | Spacing | Distance | RC | BD | BH | FAR | SVF | Spacing | Distance |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| #1 | 0.328 | 24.301 | 2.590 | 0.731 | 6.965 | 0.328 | #29 | 0.389 | 21.857 | 2.625 | 0.810 | 5.054 | 0.389 |
| #2 | 0.360 | 23.731 | 2.521 | 0.802 | 10.081 | 0.360 | #30 | 0.453 | 18.076 | 2.786 | 0.759 | 5.329 | 0.453 |
| #3 | 0.336 | 24.491 | 2.670 | 0.715 | 6.380 | 0.336 | #31 | 0.254 | 24.657 | 2.008 | 0.831 | 12.573 | 0.254 |
| #4 | 0.187 | 44.508 | 2.904 | 0.770 | 12.383 | 0.187 | #32 | 0.130 | 114.904 | 4.894 | 0.745 | 31.444 | 0.130 |
| #5 | 0.207 | 63.638 | 4.314 | 0.804 | 32.309 | 0.207 | #33 | 0.419 | 22.727 | 3.049 | 0.780 | 5.387 | 0.419 |
| #6 | 0.246 | 32.662 | 2.809 | 0.770 | 12.279 | 0.246 | #34 | 0.366 | 24.104 | 2.693 | 0.744 | 6.982 | 0.366 |
| #7 | 0.227 | 22.770 | 1.589 | 0.815 | 8.821 | 0.227 | #35 | 0.186 | 38.053 | 2.233 | 0.763 | 17.640 | 0.186 |
| #8 | 0.418 | 18.659 | 2.441 | 0.774 | 6.592 | 0.418 | #36 | 0.137 | 60.313 | 2.702 | 0.794 | 19.851 | 0.137 |
| #9 | 0.235 | 34.040 | 2.581 | 0.716 | 14.770 | 0.235 | #37 | 0.220 | 32.306 | 2.304 | 0.797 | 11.697 | 0.220 |
| #10 | 0.218 | 35.924 | 2.508 | 0.778 | 17.780 | 0.218 | #38 | 0.244 | 37.201 | 3.042 | 0.787 | 15.895 | 0.244 |
| #11 | 0.198 | 30.538 | 2.022 | 0.768 | 12.644 | 0.198 | #39 | 0.146 | 60.226 | 2.892 | 0.744 | 17.892 | 0.146 |
| #12 | 0.230 | 40.605 | 3.070 | 0.730 | 14.558 | 0.230 | #40 | 0.145 | 57.034 | 2.692 | 0.756 | 26.997 | 0.145 |
| #13 | 0.101 | 98.508 | 3.252 | 0.746 | 30.103 | 0.101 | #41 | 0.328 | 23.722 | 2.307 | 0.781 | 10.942 | 0.328 |
| #14 | 0.206 | 31.507 | 2.084 | 0.764 | 13.159 | 0.206 | #42 | 0.266 | 22.378 | 1.849 | 0.811 | 9.638 | 0.266 |
| #15 | 0.129 | 84.430 | 3.605 | 0.770 | 29.910 | 0.129 | #43 | 0.426 | 23.386 | 3.329 | 0.792 | 6.293 | 0.426 |
| #16 | 0.268 | 27.046 | 2.302 | 0.794 | 10.457 | 0.268 | #44 | 0.275 | 23.070 | 2.109 | 0.784 | 5.521 | 0.275 |
| #17 | 0.235 | 75.134 | 4.675 | 0.765 | 18.318 | 0.197 | #45 | 0.340 | 19.410 | 2.116 | 0.802 | 5.789 | 0.340 |
| #18 | 0.218 | 31.230 | 3.045 | 0.765 | 11.025 | 0.298 | #46 | 0.337 | 19.541 | 2.022 | 0.832 | 13.254 | 0.337 |
| #19 | 0.198 | 38.394 | 3.173 | 0.752 | 10.751 | 0.243 | #47 | 0.205 | 21.901 | 1.319 | 0.750 | 11.123 | 0.205 |
| #20 | 0.230 | 24.399 | 2.700 | 0.790 | 6.935 | 0.343 | #48 | 0.388 | 26.192 | 3.229 | 0.804 | 9.107 | 0.388 |
| #21 | 0.101 | 23.029 | 2.691 | 0.758 | 3.907 | 0.369 | #49 | 0.191 | 36.708 | 2.234 | 0.756 | 12.621 | 0.191 |
| #22 | 0.206 | 21.346 | 2.338 | 0.806 | 7.163 | 0.337 | #50 | 0.294 | 36.335 | 3.362 | 0.741 | 12.606 | 0.294 |
| #23 | 0.129 | 73.697 | 2.260 | 0.775 | 25.775 | 0.095 | #51 | 0.097 | 81.126 | 2.596 | 0.774 | 30.715 | 0.097 |
| #24 | 0.268 | 24.920 | 2.750 | 0.801 | 4.807 | 0.344 | #52 | 0.103 | 82.895 | 2.786 | 0.756 | 29.405 | 0.103 |
| #25 | 0.317 | 22.795 | 2.272 | 0.799 | 7.119 | 0.317 | #53 | 0.263 | 64.837 | 5.509 | 0.790 | 20.577 | 0.263 |
| #26 | 0.200 | 30.256 | 1.893 | 0.813 | 9.189 | 0.200 | #54 | 0.362 | 24.293 | 2.836 | 0.800 | 11.879 | 0.362 |
| #27 | 0.307 | 20.675 | 1.991 | 0.812 | 7.536 | 0.307 | #55 | 0.331 | 23.000 | 2.317 | 0.777 | 4.272 | 0.331 |
| #28 | 0.505 | 22.138 | 3.687 | 0.784 | 3.947 | 0.505 | #56 | 0.380 | 23.454 | 2.741 | 0.813 | 12.976 | 0.380 |
| RC | W | RC | W | RC | W | RC | W | RC | W | RC | W | RC | W |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| #1 | 74.10 | #9 | 85.10 | #17 | 81.72 | #25 | 74.73 | #33 | 64.65 | #41 | 84.31 | #49 | 82.73 |
| #2 | 85.02 | #10 | 87.11 | #18 | 83.36 | #26 | 81.52 | #34 | 72.98 | #42 | 80.79 | #50 | 79.12 |
| #3 | 73.58 | #11 | 83.09 | #19 | 83.44 | #27 | 76.37 | #35 | 87.31 | #43 | 65.58 | #51 | 86.11 |
| #4 | 80.05 | #12 | 84.28 | #20 | 73.17 | #28 | 59.06 | #36 | 85.88 | #44 | 70.61 | #52 | 85.61 |
| #5 | 83.89 | #13 | 84.95 | #21 | 63.31 | #29 | 65.34 | #37 | 82.17 | #45 | 67.85 | #53 | 79.95 |
| #6 | 80.40 | #14 | 83.09 | #22 | 74.98 | #30 | 61.81 | #38 | 84.93 | #46 | 67.43 | #54 | 80.23 |
| #7 | 80.00 | #15 | 83.50 | #23 | 87.36 | #31 | 83.12 | #39 | 85.58 | #47 | 82.22 | #55 | 65.99 |
| #8 | 73.43 | #16 | 84.87 | #24 | 64.45 | #32 | 80.47 | #40 | 87.28 | #48 | 83.73 | #56 | 80.19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, Y.; Wu, W.; Wan, G.; Zhao, Y.; Wang, W.; Yin, H.; Tian, Z.; Liu, S. Segment Anything Model-Based Building Footprint Extraction for Residential Complex Spatial Assessment Using LiDAR Data and Very High-Resolution Imagery. Remote Sens. 2024, 16, 2661. https://doi.org/10.3390/rs16142661
Ji Y, Wu W, Wan G, Zhao Y, Wang W, Yin H, Tian Z, Liu S. Segment Anything Model-Based Building Footprint Extraction for Residential Complex Spatial Assessment Using LiDAR Data and Very High-Resolution Imagery. Remote Sensing. 2024; 16(14):2661. https://doi.org/10.3390/rs16142661
Chicago/Turabian StyleJi, Yingjie, Weiguo Wu, Guangtong Wan, Yindi Zhao, Weilin Wang, Hui Yin, Zhuang Tian, and Song Liu. 2024. "Segment Anything Model-Based Building Footprint Extraction for Residential Complex Spatial Assessment Using LiDAR Data and Very High-Resolution Imagery" Remote Sensing 16, no. 14: 2661. https://doi.org/10.3390/rs16142661
APA StyleJi, Y., Wu, W., Wan, G., Zhao, Y., Wang, W., Yin, H., Tian, Z., & Liu, S. (2024). Segment Anything Model-Based Building Footprint Extraction for Residential Complex Spatial Assessment Using LiDAR Data and Very High-Resolution Imagery. Remote Sensing, 16(14), 2661. https://doi.org/10.3390/rs16142661