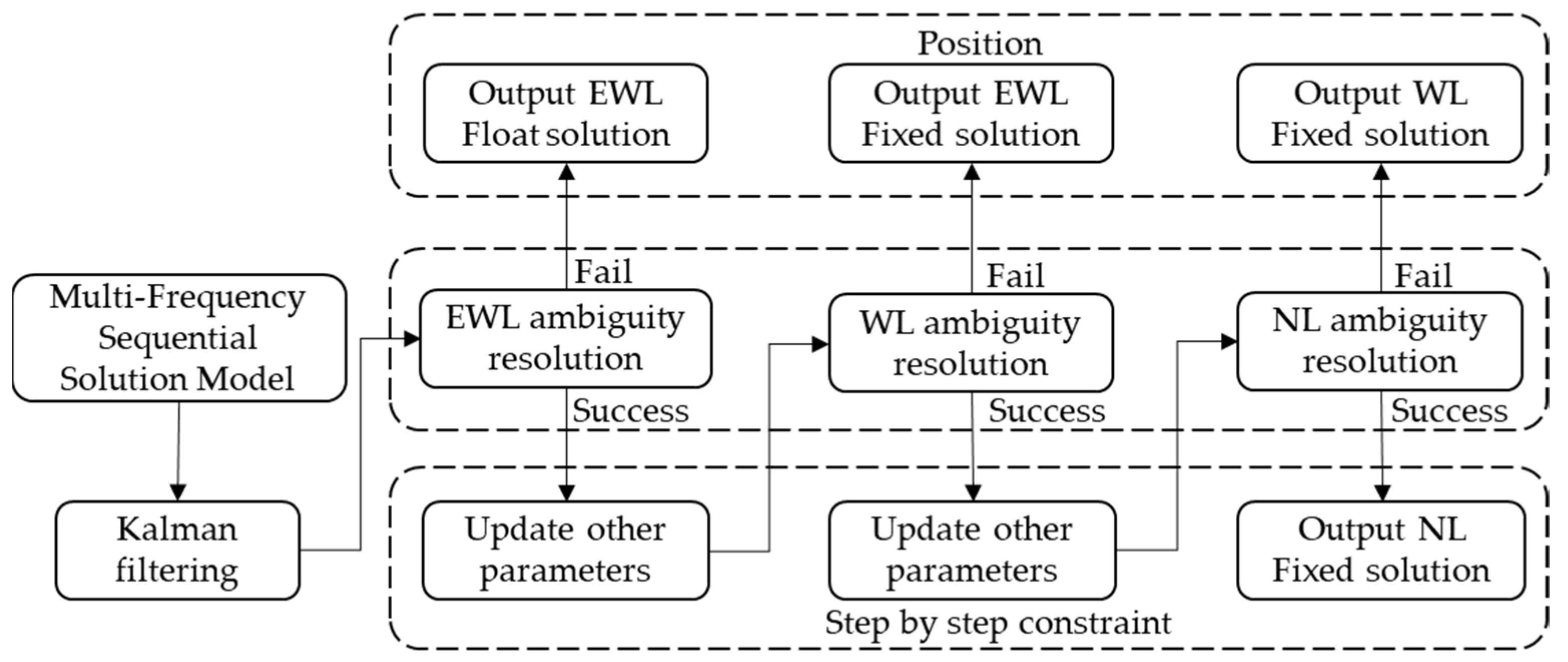
In the NRTK positioning experiments, the SAR algorithm proposed in this paper was compared to the conventional NRTK algorithm. The conventional NRTK algorithm refers to the direct involvement of carrier and pseudo-range observations from various base frequencies in the Kalman filter, with the unknown parameters being geometric parameters and NL ambiguities, and the algorithm proposed in this paper incorporates EWL, WL, and L1 carrier observations, as well as pseudo-range observations, into the filtering process. The unknown parameters include geometric parameters, as well as EWL, WL, and NL ambiguities. Both algorithms employ the Kalman filter algorithm and the LAMBDA algorithm for AR and ambiguity fixing. Additionally, a partial ambiguity fixing strategy is used to enhance the AR success rate. A chi-squared test [
5] is also applied to validate the reliability of AR.
4.2. Positioning Analysis
In order to illustrate the performance of the SAR algorithm, we first conducted single-epoch positioning experiments. The ratio threshold was set to 2.5.
Table 4 presents the positioning results of the two positioning algorithms in the two datasets for the conventional positioning experiments.
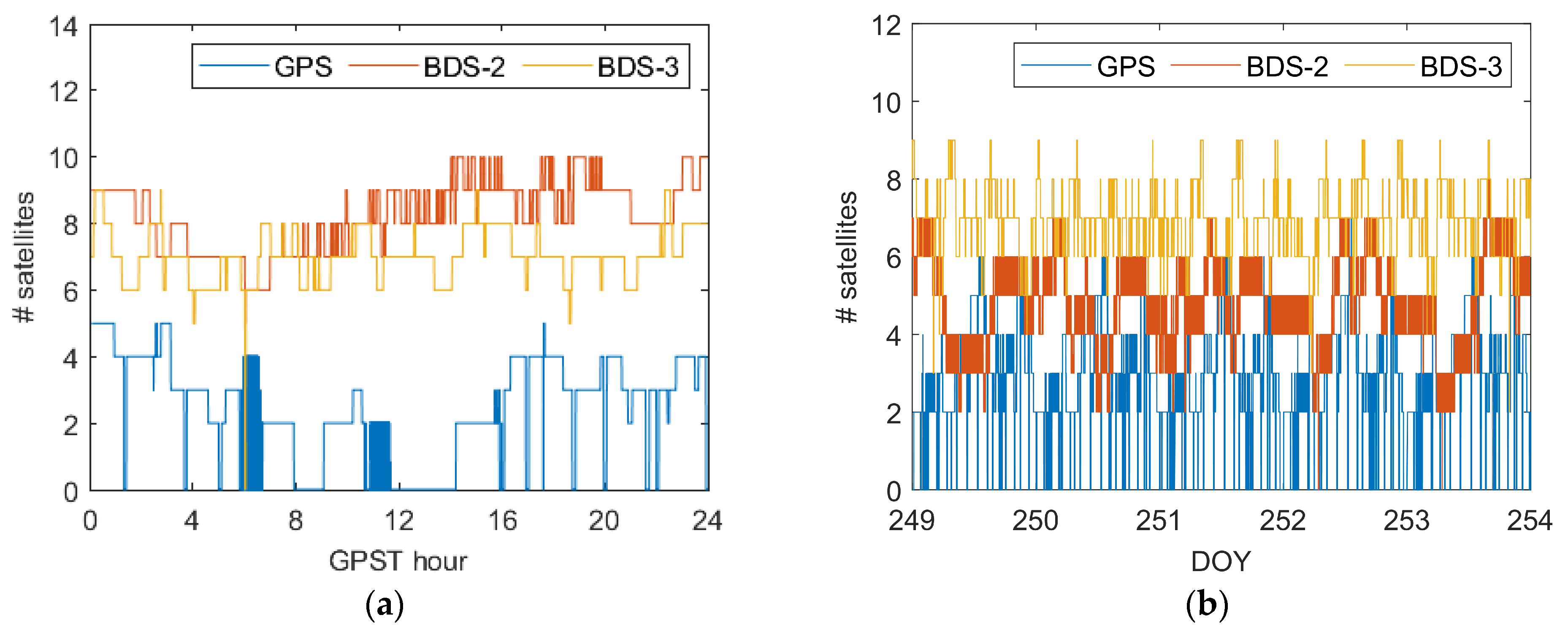
Figure 4 shows the number of satellites in two datasets, and
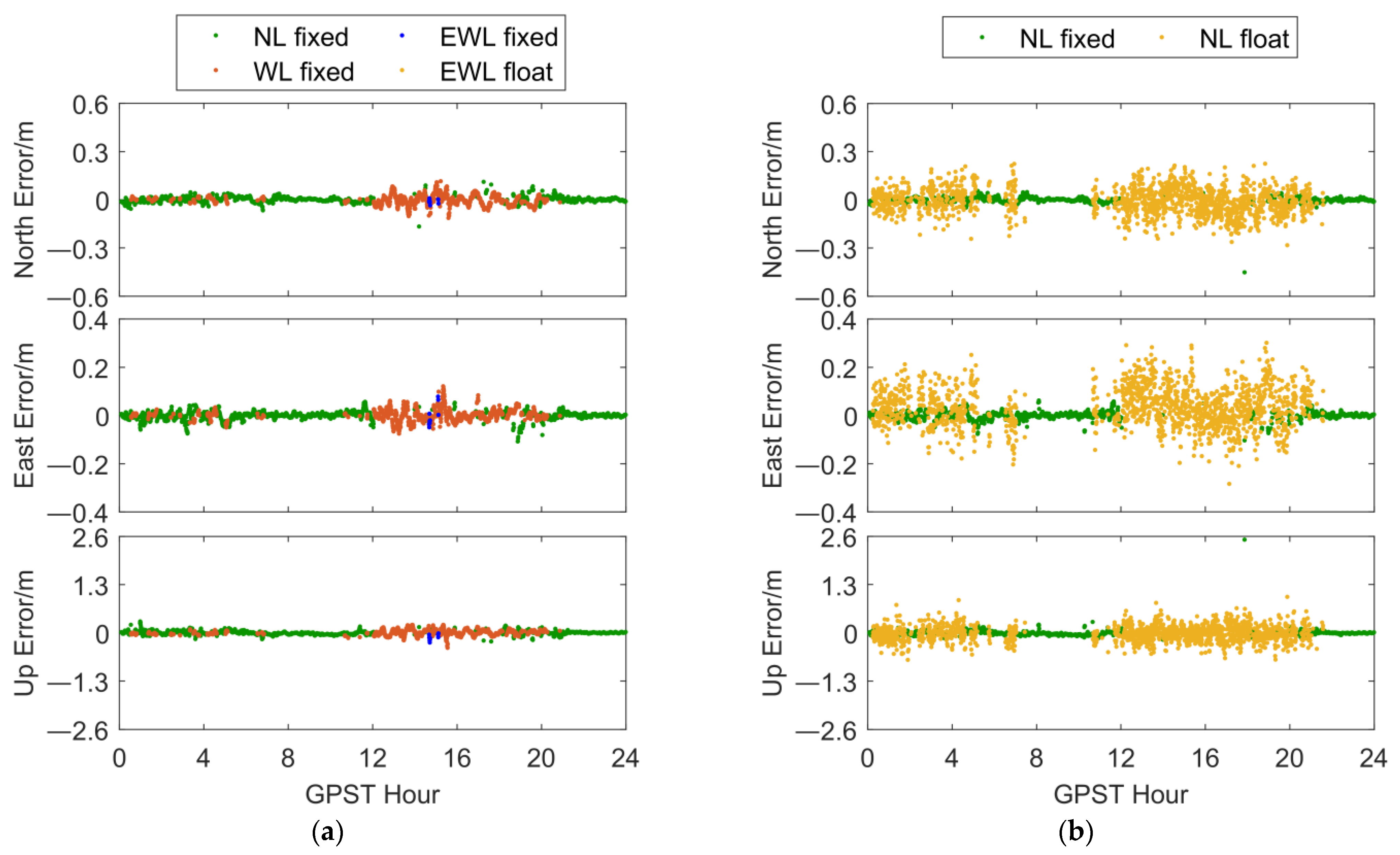
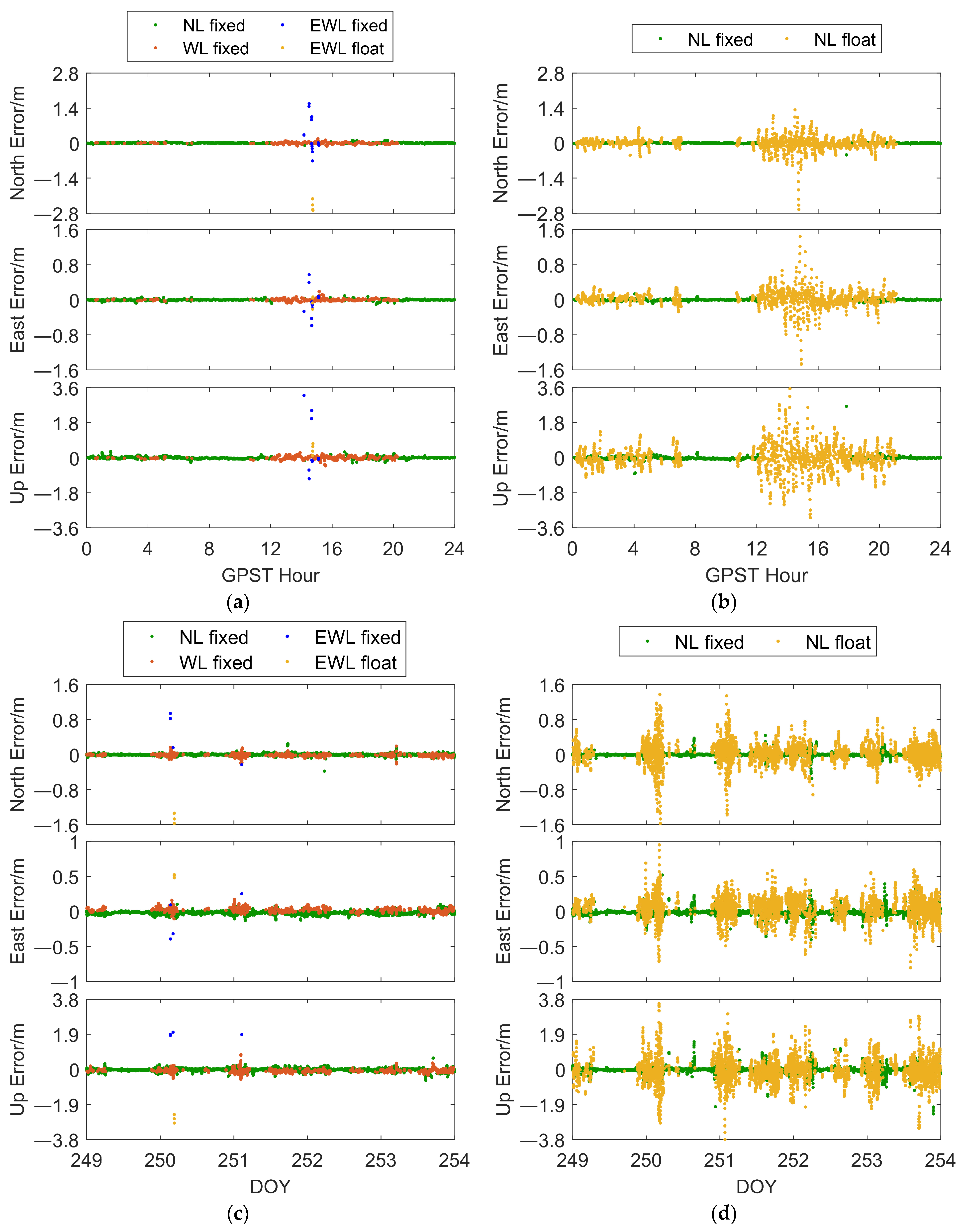
Figure 5a,b shows the positioning results of the SAR algorithm and the conventional NRTK positioning algorithm in dataset 1. The NL fixed solution accuracies in three directions (North, East, Up) for the conventional NRTK algorithm were as follows: 0.018 m, 0.016 m, and 0.091 m, respectively. On the other hand, the SAR algorithm achieved NL fixed solution accuracies of 0.016 m, 0.016 m, and 0.050 m in the same three directions. Meanwhile,
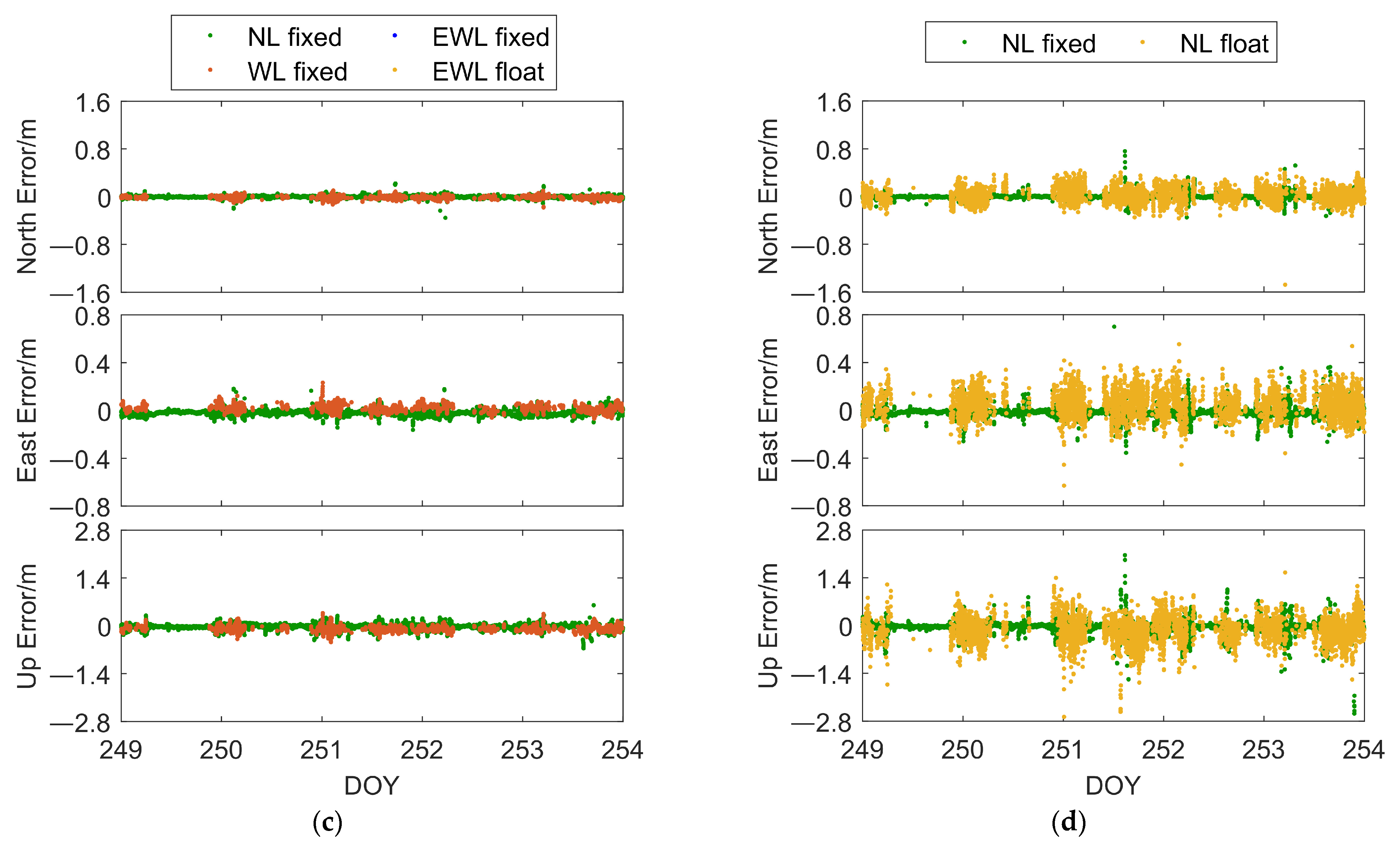
Figure 5c,d depicts the results of both algorithms in dataset 2. In this case, the conventional NRTK algorithm yielded NL fixed solution accuracies of 0.034 m, 0.039 m, and 0.149 m in the three directions, while the SAR algorithm achieved NL fixed solution accuracies of 0.018 m, 0.029 m, and 0.069 m in the same three directions. In both datasets, the SAR algorithm exhibited improvements in positioning accuracy and fixed rate. Regarding fixed solution positioning accuracy, the proposed algorithm showed slight improvements, highlighting its advantages in positioning reliability. It is worth noting that in the positioning results for dataset 1, the conventional NRTK algorithm exhibited significant biased pseudo-fixed solutions around 18:00, due to increased ionospheric activity during that period, which resulted in ionospheric delay modeling residuals reaching one wavelength. Ionospheric errors directly affect NL ambiguities, affecting AR. In the positioning results for dataset 2, the conventional NRTK algorithm exhibited pseudo-fixed solutions ranging from a few centimeters to several tens of centimeters in several periods (e.g., around 14:40 on DOY 251), which impacts the reliability of positioning. In both datasets, the SAR algorithm did not produce significantly erroneous NL fixed solutions, further demonstrating its superiority in positioning reliability.
To investigate the impact of the EWL and WL ambiguity fixed solutions in the proposed algorithm on NL ambiguities, we analyzed the fraction of NL ambiguity of the conventional NRTK positioning algorithm in dataset 2 and compared it with the fraction of NL ambiguity constrained by the EWL ambiguity fixed solution and the WL ambiguity fixed solution in the SAR algorithm.
Figure 6 provides the fraction of NL ambiguity for 10 satellite pairs at epoch 358530 (GPST-3:35:30 on DOY 250) in dataset 2. It is important to note that there were a total of 11 satellite pairs in this epoch, with only one pair from the GPS satellite system. Due to the MTHR-MSWL baseline failing to resolve the ambiguity true value for this satellite pair, this resulted in the inability to calculate the fraction of this satellite pair. Therefore, this satellite pair is not included in
Figure 6.
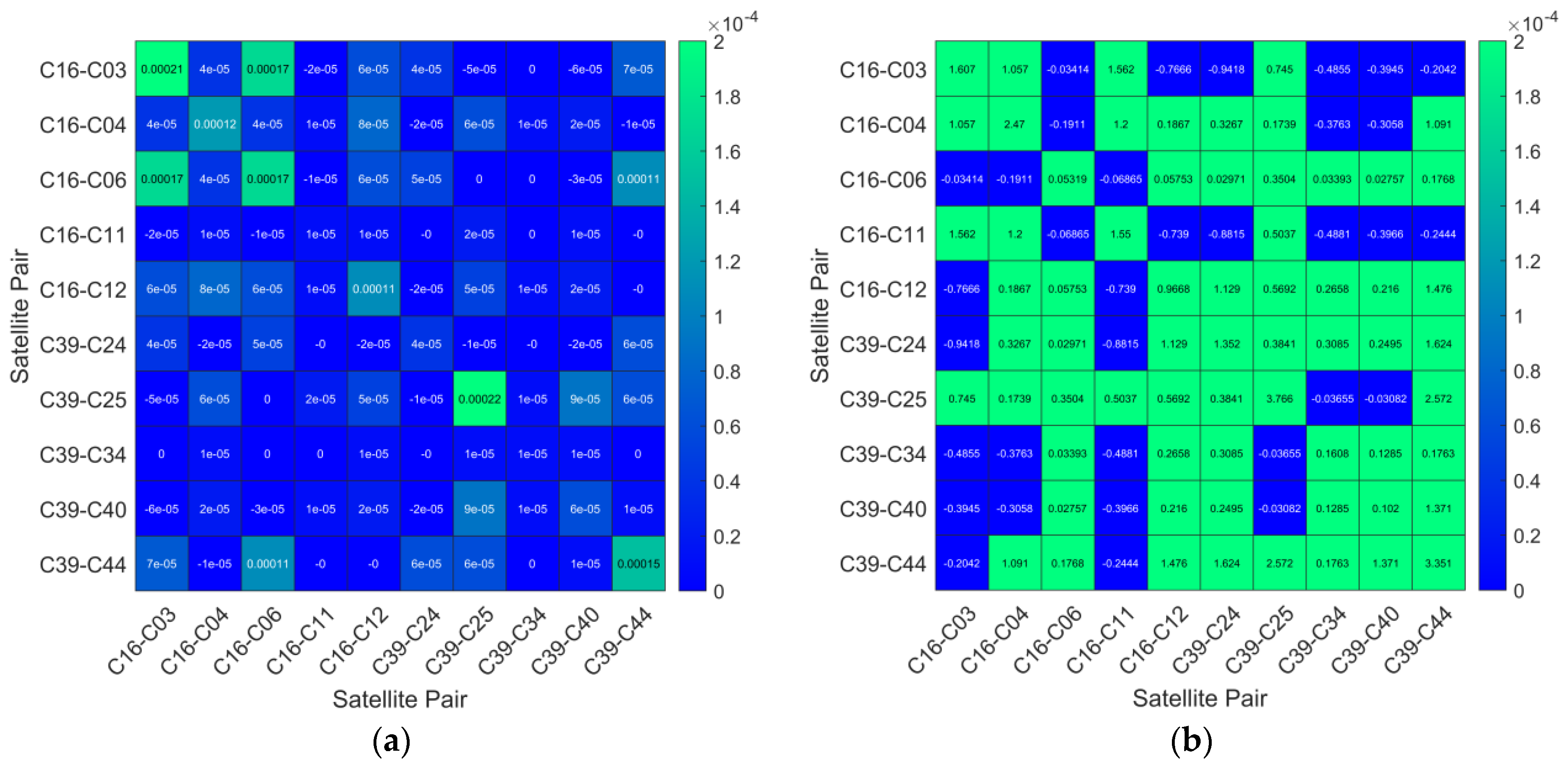
Figure 7 shows the covariance matrix for NL ambiguities of two algorithms at epoch 358530 (GPST-3:35:30 on DOY 250) in the SAR algorithm. Due to the constraints applied by the EWL ambiguity fixed solution and WL ambiguity fixed solution on the NL ambiguities, the covariance matrix for NL ambiguities approached convergence, resulting in higher ambiguity precision. By comparing the float solution fraction of NL ambiguities constrained by the EWL and WL ambiguity fixed solutions with the float solution fraction of NL ambiguities in the conventional NRTK algorithm, it can be seen that for some satellites, the fraction of NL ambiguities constrained by the EWL ambiguity fixed solutions were reduced. After being further constrained by the WL ambiguity fixed solution, the fraction of NL ambiguities for half of the satellites was less than 0.3 cycles, and all fractions of NL ambiguities were less than 0.5 cycles. This demonstrates the effective constraint of NL ambiguities by the proposed algorithm, and NL ambiguity was shown to exhibit better integer characteristics.
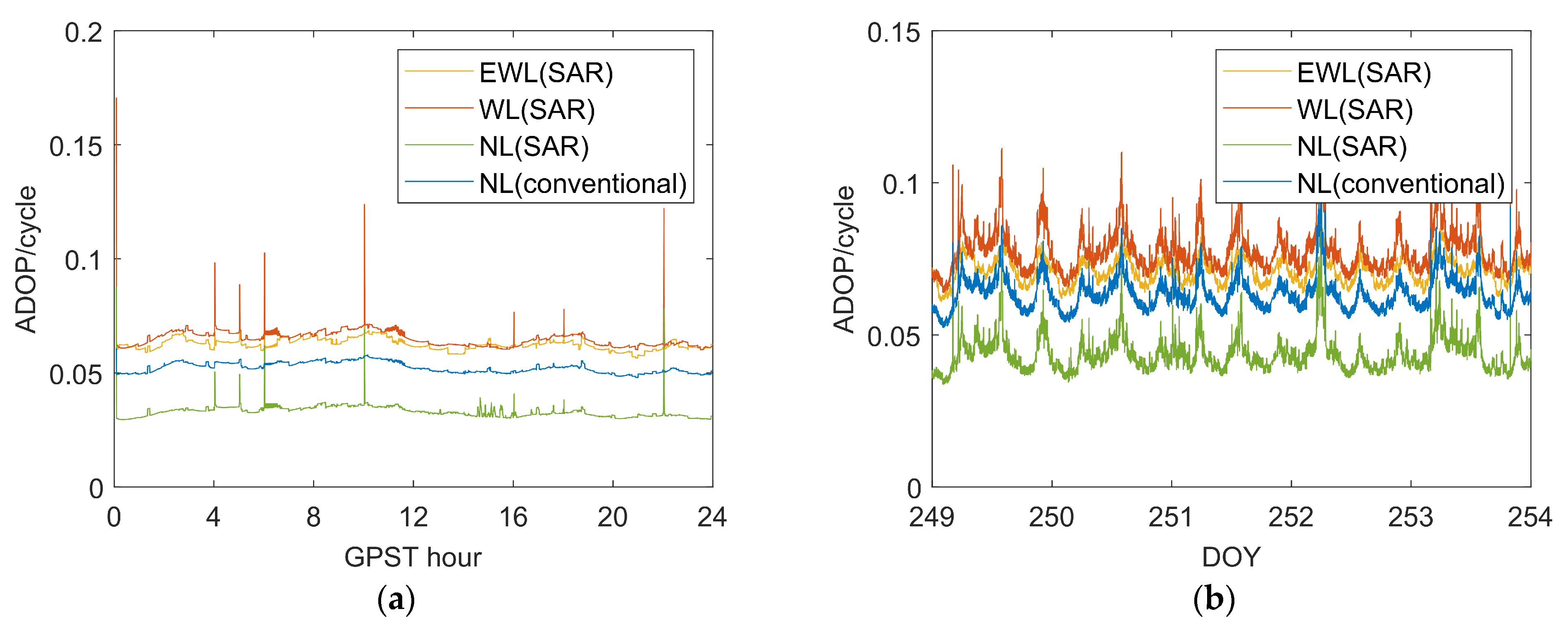
To further illustrate the effect of EWL and WL on the speed and success rate of NL AR,
Figure 8 shows the ADOP values of various ambiguities in two sets of experiments, and
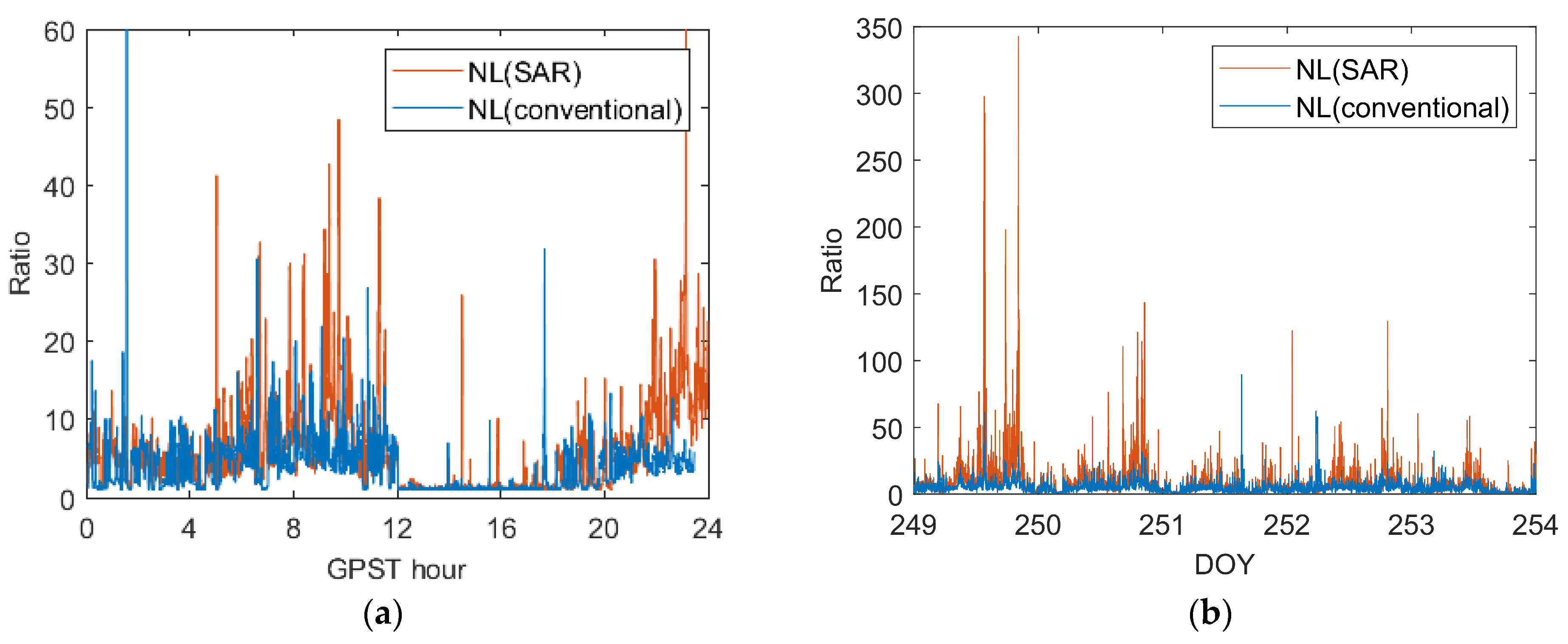
Figure 9 shows the ratio values of NL ambiguity in both sets of experiments. From
Figure 8, it is evident that the NL ambiguity ADOP value in the SAR algorithm was generally lower than that in the conventional algorithm, indicating that NL ambiguity constrained by EWL and WL contributes to a higher AR success rate [
30,
31].
Figure 9 illustrates that the ratio value of the SAR algorithm was relatively higher during periods with smaller atmospheric biases. However, during periods with larger atmospheric biases, the ratio value of the SAR algorithm aligned closely with that of conventional algorithms. This further supports the conclusion that the NL ambiguity handled by the SAR algorithm leads to a higher success rate in AR.
To quantitatively illustrate the advantages of the SAR algorithm in terms of convergence speed, we conducted an initialization positioning experiment. The experiment involved initializing every 5 min (10 epochs) and calculating the time it took for the first fix within the current time window where all subsequent epochs remained fixed. The ambiguity test ratio threshold was set to 2.5.
Table 5 provides the positioning results for the two datasets with both NRTK positioning algorithms used in the initialization experiments.
Table 6 presents the TTFF for both algorithms in the two datasets, and it clearly indicates that the SAR algorithm outperformed the conventional NRTK algorithm in terms of convergence speed.
Figure 10 shows the hourly average TTFF for two algorithms. It can be clearly seen that although the SAR algorithm also requires a large number of epochs for initialization or cannot be initialized as a fixed solution during periods with large atmospheric biases, the initialization time of the SAR algorithm is better than that of conventional algorithms when conventional algorithms require more epochs for initialization during periods with slightly smaller atmospheric biases.
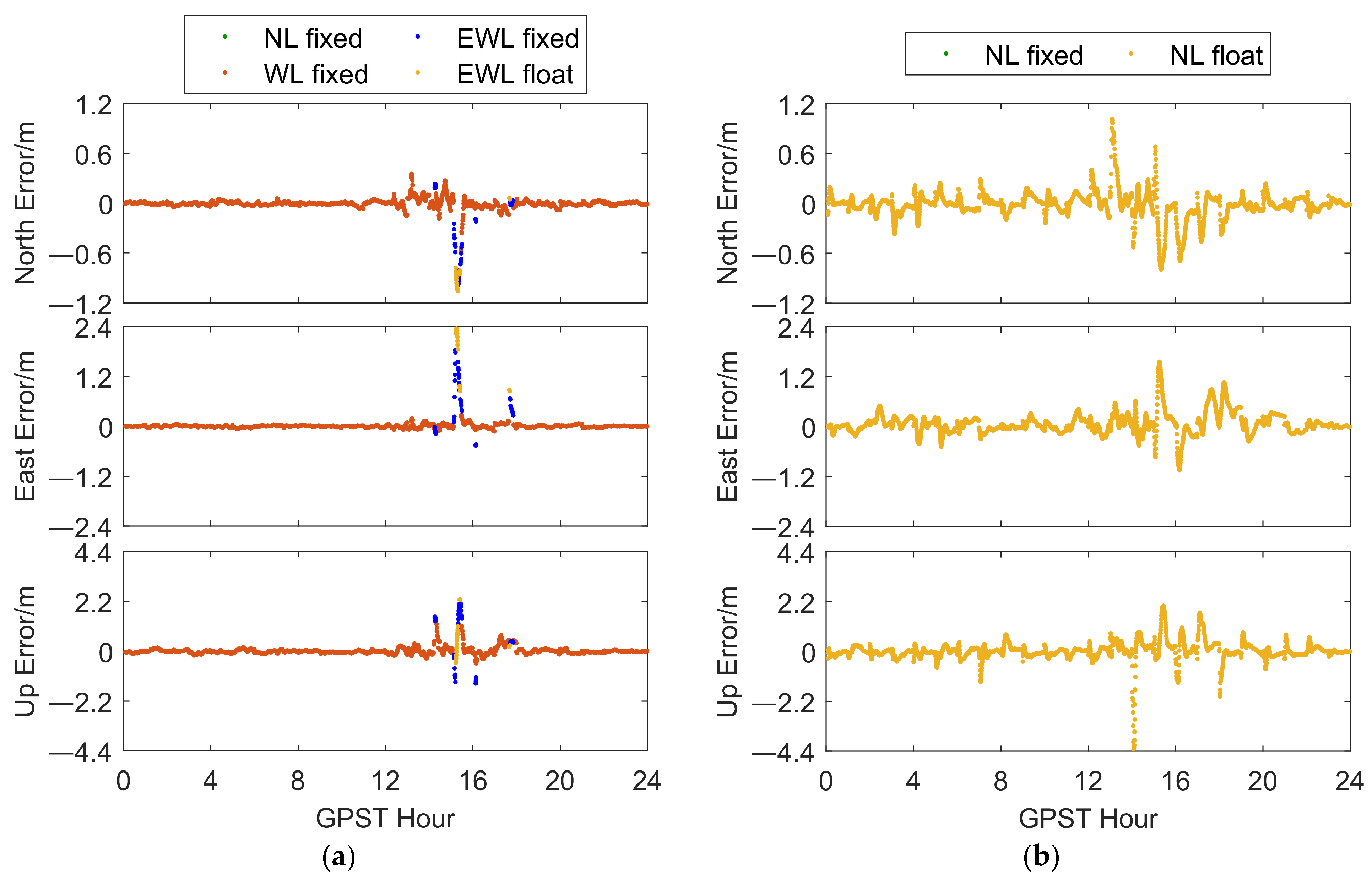
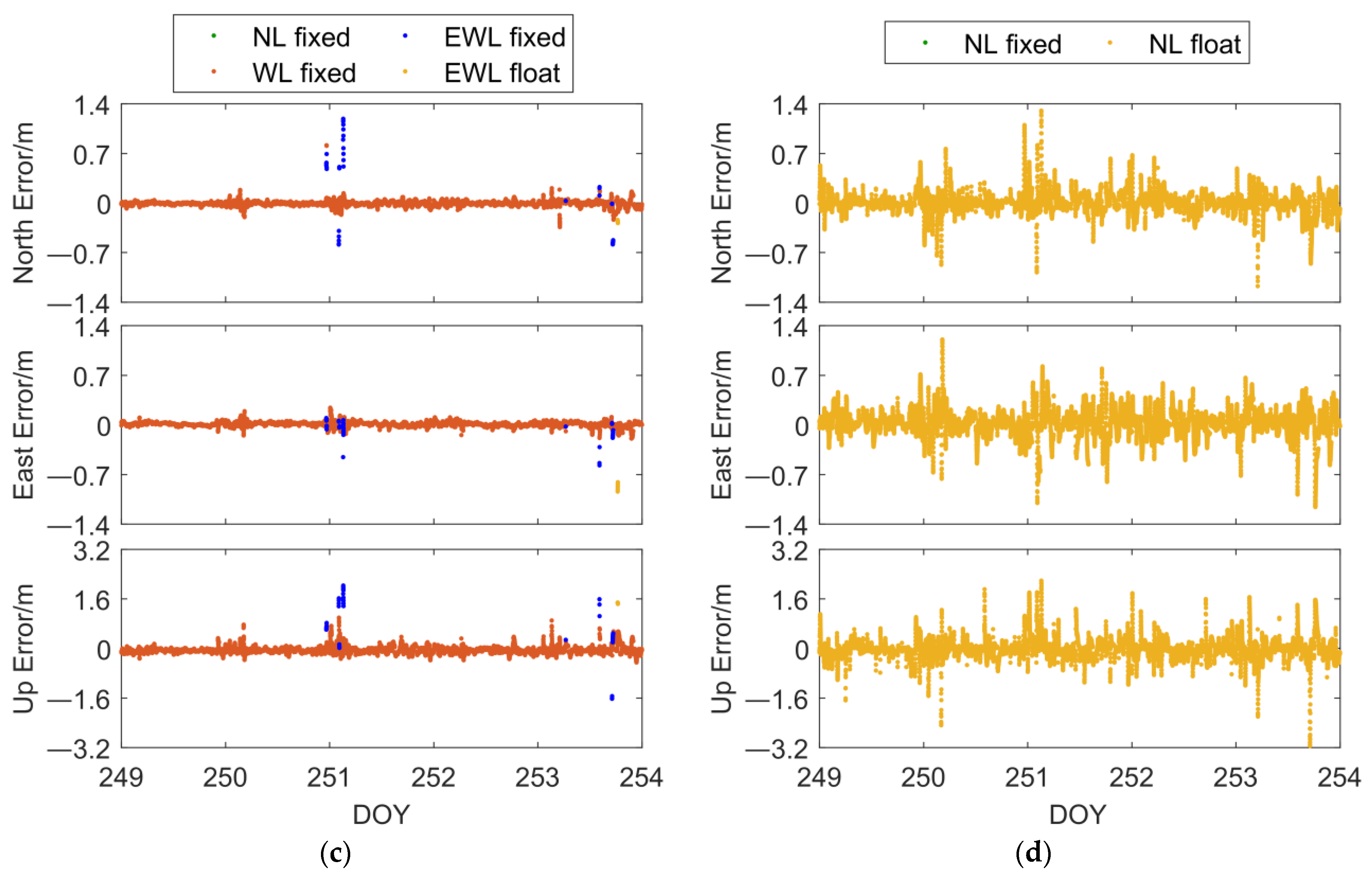
Figure 11a,b illustrates the positioning results for the SAR algorithm and the conventional NRTK positioning algorithm in dataset 1, while
Figure 11c,d shows the positioning results for both algorithms in dataset 2. Through these two sets of experiments, we observed that the SAR algorithm consistently achieved a higher NL fixed rate compared to the conventional NRTK algorithm. In particular, during 0:00 to 6:00 in dataset 1 and 22:00 to 24:00 in dataset 2, the conventional NRTK algorithm failed to initialize as a NL fixed solution. In contrast, the SAR algorithm was able to initialize as a NL fixed solution, demonstrating its superiority in terms of convergence speed. During 12:00 to 20:00 in dataset 1 and 0:00 to 6:00 in dataset 2, the conventional NRTK algorithm only provided low-accuracy NL float solutions. In these scenarios, the SAR algorithm achieved high-accuracy WL fixed solutions. Comparing
Figure 11a,b, as well as
Figure 11c,d, it is evident that the accuracy of the WL fixed solutions in the SAR algorithm was significantly higher than the accuracy of the NL float solutions obtained by the conventional NRTK algorithm. Although the accuracy of the EWL fixed solutions was relatively lower, it still matched the accuracy level of the NL float solutions in the conventional NRTK algorithm.
In the above experiment, it can be found that both the SAR algorithm and the conventional algorithm cannot be NL fixed during periods of significant atmospheric biases. During this period, the positioning accuracy provided by the conventional algorithm was poor. To demonstrate that the SAR algorithm can provide more reliable positioning when it cannot provide a NL fixed solution, we conducted another initialization experiment. In this experiment, the NL ambiguity test ratio value was set to maximum, with this resulting in both algorithms being unable to obtain NL fixed solutions. Due to the slow convergence speed of NL float solutions in conventional algorithms, we initialized the algorithms once every hour to compare their positioning accuracy and reliability during initialization.
Table 6 displays the positioning accuracy of both algorithms in two datasets, demonstrating that the SAR algorithm had significantly improved positioning accuracy in both cases.
Figure 12 illustrates the positioning results of both algorithms in two datasets, while
Figure 13 presents the ADOP values of NL ambiguities in the experiments. Combining
Table 7 and
Figure 12 and
Figure 13, we conclude that the SAR algorithm exhibited higher initialization speed and can deliver higher accuracy and more reliable positioning during the initialization phase.
Due to the fact that atmospheric biases are not always significant, atmospheric biases were relatively small in most scenarios. In order to illustrate the general positioning performance of the SAR algorithm proposed in this paper in most scenarios, we conducted conventional positioning experiments (i.e., continuous filtering using regular NRTK). The ratio threshold was set to 2.5.
Table 8 presents the positioning results of the two positioning algorithms in the two datasets for the conventional positioning experiments.
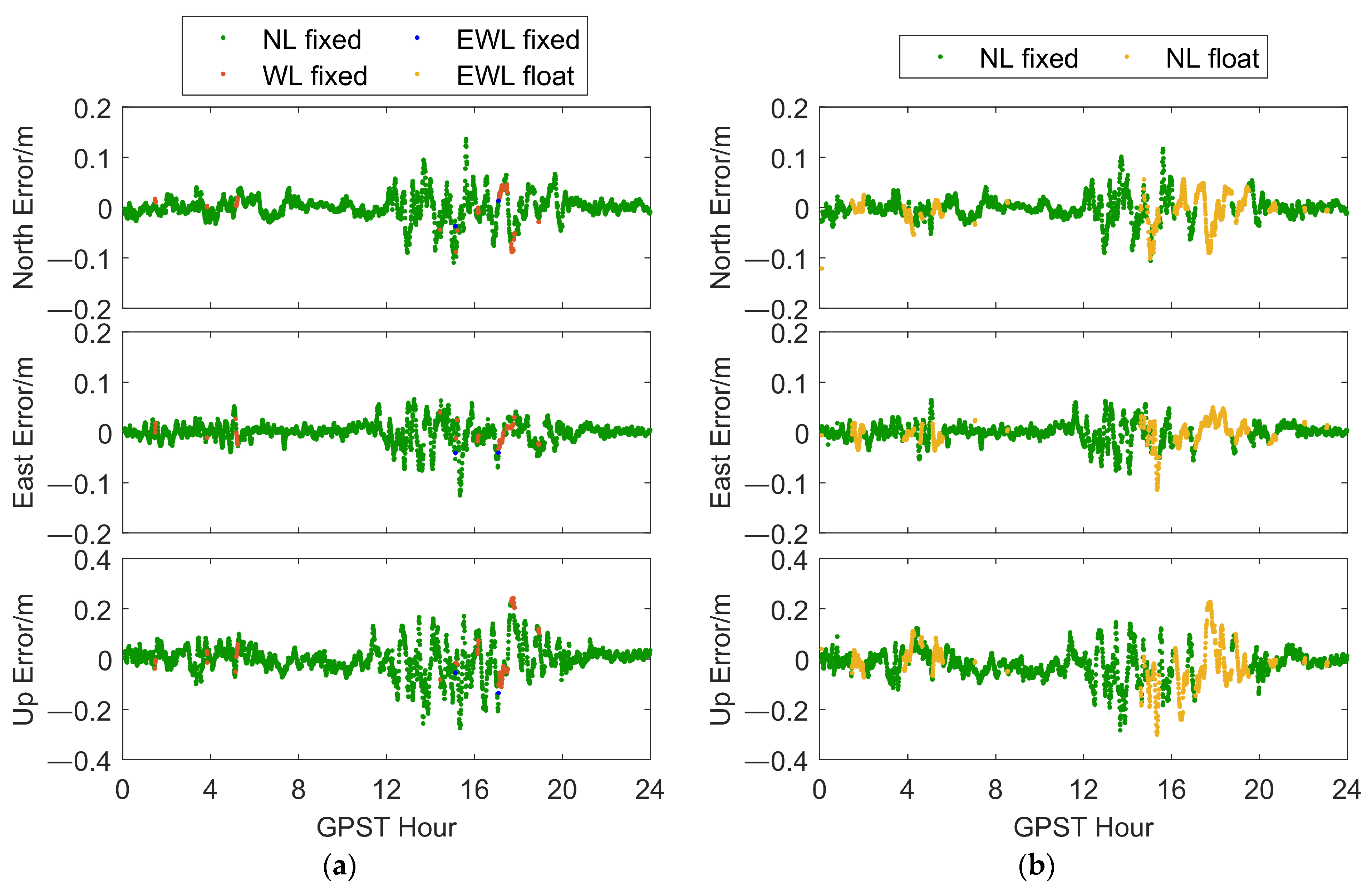
Figure 14a,b shows the positioning results of the SAR algorithm and the conventional NRTK positioning algorithm in dataset 1. The positioning accuracy of the two algorithms was generally comparable. In terms of NL fixed rate, the SAR algorithm showed an improvement of approximately 20%. This improvement was mainly observed from 12:00 to 18:00. However, the increased fixed solutions did not exhibit a significant improvement in positioning accuracy.
Figure 3 indicates an increase in ionospheric delay modeling residuals during this time period, leading to a decrease in positioning accuracy. This suggests that the algorithm proposed in this paper is also affected by significant atmospheric error modeling residuals, and its positioning accuracy is comparable to conventional NRTK positioning.
Figure 14c,d depicts the results of both algorithms in dataset 2. The SAR algorithm showed a significant improvement in positioning accuracy compared to the conventional NRTK positioning algorithm. The positioning accuracy improvements in the North, East, and Up directions were 19%, 26%, and 12%, respectively. The lower positioning accuracy of conventional NRTK positioning was mainly due to the initialization phase not converging, resulting in many large NL float solutions biases. However, the SAR algorithm quickly converged to NL fixed solutions in the initialization phase, demonstrating its advantage. In terms of NL fixed solution positioning accuracy, both algorithms were generally consistent. Both sets of datasets demonstrated that the SAR algorithm can achieve positioning accuracy at a similar level to conventional NRTK positioning algorithms under general positioning conditions and exhibited an advantage in the initialization phase.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}